简易无线遥控系统设计.(DOC)
无线遥控车控制系统设计资料
无线遥控车控制系统设计资料一、引言二、设计原理遥控器手柄通过操纵杆、按键等输入信号获取用户的操作指令,并将指令转化为数字信号输出。
无线信号传输模块将数字信号通过无线方式发送到车载控制主板。
车载控制主板接收到信号后,解码操作指令,并控制车辆的电机、舵机等部件实现相应的动作。
三、硬件组成1.遥控器手柄:包括操纵杆、按键和显示屏等组件。
操纵杆用于控制车辆前进、后退、转向等动作;按键用于实现其他功能,如灯光控制、声音控制等;显示屏用于显示当前车辆状态等信息。
2.无线信号传输模块:一般采用蓝牙、射频、红外等通信方式,将遥控指令传输到车载控制主板。
3.车载控制主板:负责接收和解码无线信号,并控制车辆运动。
主板上包括处理器、电机控制芯片、舵机控制芯片等组件。
4.无线信号接收模块:用于接收来自遥控器的无线信号,并传递给车载控制主板。
四、软件设计软件设计是无线遥控车控制系统不可或缺的一部分。
主要包括遥控指令解码算法、车辆控制算法和用户界面设计。
1.遥控指令解码算法:根据不同的无线信号传输模块,设计对应的解码算法,将接收到的数字信号解码为具体的操作指令。
2.车辆控制算法:根据接收到的操作指令,设计控制车辆运动的算法。
通过控制电机、舵机等部件的转动,实现车辆的前进、后退、转向等动作。
3.用户界面设计:在遥控器手柄上设计友好的用户界面,通过显示屏等方式向用户展示车辆状态、当前操作指令等信息。
五、总结无线遥控车控制系统是一种通过无线信号控制车辆运动的系统,由遥控器手柄、无线信号传输模块、车载控制主板和无线信号接收模块组成。
软件设计包括遥控指令解码算法、车辆控制算法和用户界面设计。
这种系统在无人驾驶车辆、航拍无人机等领域具有广泛的应用前景。
电子设计大赛控制类题目汇总

全国大学生电子设计竞赛历年题目(1994-2011)第一届(1994年)全国大学生电子设计竞赛题目题目三简易无线电遥控系统一、任务设计并制作无线电遥控发射机和接收机.1.无线电遥控发射机2.无线电遥控接收机二、要求1.基本要求(1)工作频率:fo=6~10MHz中任选一种频率.(2)调制方式:AM、FM或FSK……任选一种.(3)输出功率:不大于20mW(在标准75Ω假负载上).(4)遥控对象:8个,被控设备用LED分别代替,LED发光表示工作.(5)接收机距离发射机不小于10m.2.发挥部分(1)8路设备中(de)一路为电灯,用指令遥控电灯亮度,亮度分为8级并用数码管显示级数.(2)在一定发射功率下(不大于20mW),尽量增大接收距离.(3)增加信道抗干扰措施.(4)尽量降低电源功耗.注:不能采用现成(de)收、发信机整机.三、评分意见电子设计大赛控制类题目汇总·控制类(de)题目均要注意外界(de)干扰.要采取一定(de)屏蔽措施.·涉及到电机时要考虑控制部分和电机部分,分开供电.双电源供电.将电动机驱动电源与单片机以及其周边电路完全隔离,利用光电耦合传输信号.这样做虽然不如单电源方便灵活,但可以将电动机所造成(de)干扰彻底消除,提高了系统稳定性.·掌握各种算法.第三届(1997年)C题水温控制系统一、任务设计并制作一个水温自动控制系统,控制对象为1升净水,容器为搪瓷器皿.水温可以在一定范围内由人工设定,并能在环境温度降低时实现自动控制,以保持设定(de)温度基本不变.二、要求1.基本要求(1)温度设定范围为40~90℃,最小区分度为1℃,标定温度≤1℃.(2)环境温度降低时(例如用电风扇降温)温度控制(de)静态误差≤1℃.(3)用十进制数码管显示水(de)实际温度.2.发挥部分(1)采用适当(de)控制方法,当设定温度突变(由40℃提高到60℃)时,减小系统(de)调节时间和超调量.(2)温度控制(de)静态误差≤℃.(3)在设定温度发生突变(由40℃提高到60℃)时,自动打印水温随时间变化(de)曲线.三、评分意见四、说明(1)加热器用1千瓦电炉.(2)如果采用单片机控制,允许使用已右(de)单片机最小系统电路板(3)数码显示部分可以便用数码显示模块.(4)测量水温时只要求在容器内任意设置一个测量点.(5)在设计报告前附一篇400字以内(de)报告摘要.赛题分析:一、赛题要点:水温(de)范围水温调节(de)误差水温变化(de)速度打印水温变化(de)曲线二、参考设计方案1、水温(de)测量.温度传感器(参考型号AD590K)2、加热水.用脉冲移相触发可控硅来调节加热丝有效功率.3、控制算法.采用分段非线性加积分分离PI算法进行温度控制.模糊控制算法三、一些设计中(de)创新1、加入报警装置,当温度变化过大时,报警.2、通过键盘在线打印曲线与数据.3、加入语音模块.四、设计中(de)注意事项若采用1000w电炉加热1L水,控制对象(de)数学模型难以准确确定,所以要通过实验总结其控制特性,以确定控制算法(de)各项参数.第五届(2001年)C题自动往返电动小汽车一、任务设计并制作一个能自动往返于起跑线与终点线间(de)小汽车.允许用玩具汽车改装,但不能用人工遥控(包括有线和无线遥控).跑道宽度,表面贴有白纸,两侧有挡板,挡板与地面垂直,其高度不低于20cm.在跑道(de)B、C、D、E、F、G各点处画有2cm宽(de)黑线,各段(de)长度如图1所示.二、要求1.基本要求(1)车辆从起跑线出发(出发前,车体不得超出起跑线),到达终点线后停留10秒,然后自动返回起跑线(允许倒车返回).往返一次(de)时间应力求最短(从合上汽车电源开关开始计时).(2)到达终点线和返回起跑线时,停车位置离起跑线和终点线偏差应最小(以车辆中心点与终点线或起跑线中心线之间距离作为偏差(de)测量值).(3)D~E间为限速区,车辆往返均要求以低速通过,通过时间不得少于8秒,但不允许在限速区内停车.2.发挥部分(1)自动记录、显示一次往返时间(记录显示装置要求安装在车上).(2)自动记录、显示行驶距离(记录显示装置要求安装在车上).(3)其它特色与创新.三、评分标准四、说明(1)不允许在跑道内外区域另外设置任何标志或检测装置.(2)车辆(含在车体上附加(de)任何装置)外围尺寸(de)限制:长度≤35 cm,宽度≤15cm.(3)必须在车身顶部明显标出车辆中心点位置,即横向与纵向两条中心线(de)交点.赛题分析一、题目要点1、要求往返一次(de)时间最短,中间有限速区,接近终点也要减速,故要时时对小车(de)速度进行调整.2、限速区低速通过,接近终点要减速.故要准确判断加速减速(de)区域,即要精确定位.3、前轮方向要有纠偏装置,防止小车撞到挡板.4.、车速、行驶距离要显示.二、参考设计1、控制系统.采用两片单片机分工协作.2、车速和距离(de)检测.检测仪器应安装在前轮.因为后轮刹车时易打滑和反转.○1断续式光电开关.由于该开关是沟槽结构,可以将其置于固定轴上,再在车轮上均匀地固定多个遮光条.让其恰好通过沟槽,产生一个个脉冲.通过脉冲(de)计数,对速度进行测量.○2开关式霍尔传感器.该器件内部由三片霍尔金属相组成,当磁铁正对金属板时,出于霍尔效应,金属板发生横向导通,因此可以在车轮上安装磁片、而将霍尔集成片安装固定在轴上,通过对脉冲(de)计数进行车速测量.○3光电码盘.3、路面黑线检测.○1脉冲调制(de)反射式红外发射—接收器○2光电传感器.传感器(de)放置位置可以使小车底部(de)前中后,也可以是小车前面.根据不同(de)位置,采用不同(de)算法分析.4、停车方案.满速前进,临近终点反向制动.到终点后再反向制动断电即停.5、限速方案.反向制动-----正向驱动-----反问驱动------正向驱动(de)循环驱动过程.该方案通过单片机精确(de)驱动信号,使反向制动时间小于正向驱动时间,以达到小车总体向前缓速前进.6、避免小车碰壁(de)方案.○1超声波传感器.超声波传感器可以给CPU提供足够精确(de)位置信息,使得CPU可以根据该信息精确调整小车(de)运行方向和状态,使小车在运行时达到最小(de)横向抖动.单片机根据发射和接收到超声波(de)时间差判断小车离挡板(de)长度,根据这个数据发出前轮左转、右转或保持方向(de)指令.从而实现自动校正行车路线,少撞墙而快速地往返.○2光电传感器完成对左右挡板(de)检测.同时为了减小车与挡板相撞时(de)摩擦,可以在车体(de)四个角加装四个小滑轮.三、设计中(de)亮点1、加入语音模块.2、可以用实验(de)方法确定脉冲宽度(de)工作频率.3、加装车灯,指示行驶状态.4、刹车时,加入自动防抱死(ABS)环节.第六届(2003年)简易智能电动车(E题)一、任务设计并制作一个简易智能电动车,其行驶路线示意图如下:二、要求1、基本要求(1)电动车从起跑线出发(车体不得超过起跑线),沿引导线到达B点.在“直道区”铺设(de)白纸下沿引导线埋有1~3块宽度为15cm、长度不等(de)薄铁片.电动车检测到薄铁片时需立即发出声光指示信息,并实时存储、显示在“直道区”检测到(de)薄铁片数目.(2)电动车到达B点以后进入“弯道区”,沿圆弧引导线到达C点(也可脱离圆弧引导线到达C点).C点下埋有边长为15cm(de)正方形薄铁片,要求电动车到达C点检测到薄铁片后在C点处停车5秒,停车期间发出断续(de)声光信息.(3)电动车在光源(de)引导下,通过障碍区进入停车区并到达车库.电动车必须在两个障碍物之间通过且不得与其接触.(4)电动车完成上述任务后应立即停车,但全程行驶时间不能大于90秒,行驶时间达到90秒时必须立即自动停车.2、发挥部分(1)电动车在“直道区”行驶过程中,存储并显示每个薄铁片(中心线)至起跑线间(de)距离.(2)电动车进入停车区域后,能进一步准确驶入车库中,要求电动车(de)车身完全进入车库.(3)停车后,能准确显示电动车全程行驶时间.(4)其它.三、评分标准试数据及测试结果分析实际完成情况50发挥部分完成第(1)项15 完成第(2)项17 完成第(3)项8 其它10四、说明1、跑道上面铺设白纸,薄铁片置于纸下,铁片厚度为~.2、跑道边线宽度5cm,引导线宽度2cm,可以涂墨或粘黑色胶带.示意图中(de)虚线和尺寸标注线不要绘制在白纸上.3、障碍物1、2可由包有白纸(de)砖组成,其长、宽、高约为50cm12cm6cm,两个障碍物分别放置在障碍区两侧(de)任意位置.4、电动车允许用玩具车改装,但不能由人工遥控,其外围尺寸(含车体上附加装置)(de)限制为:长度≤35cm,宽度≤15cm.5、光源采用200W白炽灯,白炽灯泡底部距地面20cm,其位置如图所示.6、要求在电动车顶部明显标出电动车(de)中心点位置,即横向与纵向两条中心线(de)交点.赛题分析一、题目要点1、小车(de)尺寸限制.2、全程行驶时间限制,弯道速度要适宜.3、检测到薄片且能显示金属薄片到起跑线(de)距离.4、在C处停留5秒,停车期间发出断续(de)声光信息计时.5、停车后,显示全程行驶时间.6、注意到障碍物高6厘米,而光源高20厘米.二、参考设计整个系统可以分为以下几个模块:线路跟踪金属检测光源检测避障电路路程计算模块1、路程计算.○1光电传感器○2霍尔开关(霍尔传感器)2、线路跟踪.○1脉冲调制(de)反射式红外发射接收对管.启动时,小车跨骑在黑线上.两个红外发射接收对管,分别安装在黑线(de)两侧(de)白色区域,输出为低电压,当走偏,位于黑线上时,输出为高电压.因黑线较窄(2cm),为及时调整车(de)方向,选择比较器(de)阀值为,即黑白相间(de)位置,即开始调整.○2光电传感器.用三只光电开关.一只置于轨道中间,两只置于轨道外侧,当小车脱离轨道时,即当置于中间(de)一只光电开关脱离轨道时,等待外面任一只检测到黑线后,做出相应(de)转向调整,直到中间(de)光电开关重新检测到黑线(即回到轨道)再恢复正向行驶.○3色标传感器.在小车(de)中部平行装有两个色标传感器,采用查询检测(de)方法对黑线进行检测3、金属检测.○1电感式接近开关.当金属物体接近开关(de)感应区域,开关就能无接触,无压力、无火花、迅速作出反应○2金属探测传感器(涡流型铁金属探测传感器,参考型号LJ18A3-Z/BX)4、光源检测.光敏电阻(光敏传感器).只用三到五只光敏电阻就可以达到目(de),只是因其对光非常敏感,所以必需为每只光敏电阻加上黑色隔离板.在各光敏电阻间用隔板隔开如此摆放可以很好(de)解决探测光源方位(de)难题,从而正确控制小车(de)转向.当小车行驶方向朝向光源时,中间电阻阻值为低,当小车偏移光源方向时,由于光敏电阻间挡板(de)遮拦作用,两侧(de)电阻定有一侧为低.参考摆放位置如下图5、避障电路.注意到障碍物高6厘米,而光源高20厘米.故设计避障电路时,可以先寻找光源,当找到光源后,再检测障碍物,调整前进方向.这样做,可以节省时间.○1超声波测距.采用超声波传感器探测障碍物.超声波传感器安装于小车前端,在规定(de)检测距离内,当探测到障碍物时,超声波传感器给出脉冲信号至单片机,单片机检测到该信号后,调整小车方向,以控制小车准确(de)绕过障碍物.○2反射式红外传感器○3采用试验(de)方法,确定一条比较精确(de)路线,让单片机记住(通用性差,但节省时间)三、设计中(de)一些亮点发挥1、因为涉及(de)模块比较多,故要用多片单片机协作工作.最好增加一个时钟模块,统一系统时间.2、软件降温.在长转弯过程中通过设置前端转向电机间隙停转以达到降温(de)目(de).3、弯道要减速.4、增加车顶彩灯等装饰,更加人性化.附:参考元件安装方位第七届(2005年)悬挂运动控制系统(E题)一、任务设计一电机控制系统,控制物体在倾斜(仰角≤100度)(de)板上运动.在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮(de)吊绳控制一物体在板上运动,运动范围为80cm×100cm.物体(de)形状不限,质量大于100克.物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹.板上标有间距为1cm(de)浅色坐标线(不同于画笔颜色),左下角为直角坐标原点,示意图如下.二、要求1、基本要求:(1)控制系统能够通过键盘或其他方式任意设定坐标点参数;(2)控制物体在80cm×100cm(de)范围内作自行设定(de)运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成;(3)控制物体作圆心可任意设定、直径为50cm(de)圆周运动,限300秒内完成;(4)物体从左下角坐标原点出发,在150秒内到达设定(de)一个坐标点(两点间直线距离不小于40cm).2、发挥部分(1)能够显示物体中画笔所在位置(de)坐标;(2)控制物体沿板上标出(de)任意曲线运动(见示意图),曲线在测试时现场标出,线宽~,总长度约50cm,颜色为黑色;曲线(de)前一部分是连续(de),长约30cm;后一部分是两段总长约20cm(de)间断线段,间断距离不大于1cm;沿连续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他.三、评分标准四、说明1、物体(de)运动轨迹以画笔画出(de)痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合,同时尽量缩短运动时间;2、若在某项测试中运动超过限定(de)时间,该项目不得分;3、运动轨迹与预期轨迹之间(de)偏差超过4cm时,该项目不得分;4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开始运动后,不能再人为干预物体运动;5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸)测试时自带.赛题分析:一、题目要点要求概述:寻点画线画圆画一般曲线寻轨1、板是倾斜(de),则在考虑物体(de)运动时只考虑一边即可.2、悬挂物体(de)质量>=100g,要考虑电机(de)功率是否满足.3、各种运动均有时间限制,则要考虑控制系统(de)运算速度是否能够满足.4、因为涉及平面上(de)运动,画直线、圆等,要多多结合数学知识.二、设计系统时(de)注意事项:1、误差(de)分析与补偿.误差来源有,电动机(de)惯性、绳子(de)收缩、坐标(de)计算等.补偿方法有多次测量后修改程序中(de)参数,通过程序修正;选用材料时使用到对系统影响小(de);采用更优(de)算法.2、电机(de)保护.可以在L298N外围接续流二极管,保护电机.3、考虑光电传感器(de)灵敏度问题,加比较器,使输出一致.三、设计参考1、寻点画线采用数学上(de)坐标间(de)关系,计算出两条绳子收放(de)长度,进而转换为步进电机(de)转数.2、画圆○1采用多边形逼近方法,等分圆周,计算出每一点(de)坐标值,利用画直线(de)方法画每一小段.○2也是分割(de)思想,不过是分割圆(de)转角,一般以1°为单位分割,计算从起点到终点每隔1°(de)点(de)直角坐标.3、寻迹○1采用红外对射光电传感器检测黑色轨迹,安装于物体(de)边上.○2采用红外对射光电传感器检测黑色轨迹,安装于物体(de)底部.○3寻迹(de)算法,根据传感器位置(de)不同,采用不同(de)算法.4、利用光电耦合器隔离控制部分和电动机电路.5、画图时可采用逐点逼近(de)方法,减小误差.6、设计(de)一些特点,发挥○1加入语音提示○2利用视频识别采集黑线信息○3LED(de)亮灭提示两电机(de)工作状态.○4加入电机测速模块,尽量通过算法使两电机同时完成转动,这样画出(de)曲线更光滑.第八届(2007年)小车跷跷板(F题)一、任务设计并制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动(de)配重.配重(de)位置可以在从始端开始(de)200mm~600mm范围内调整,调整步长不大于50mm;配重可拆卸.电动车从起始端A出发,可以自动在跷跷板上行驶.电动车跷跷板起始状态和平衡状态示意图分别如图1和图2所示.二、要求1.基本要求在不加配重(de)情况下,电动车完成以下运动:(1)电动车从起始端A出发,在30秒钟内行驶到中心点C附近;(2)60秒钟之内,电动车在中心点C附近使跷跷板处于平衡状态,保持平衡5秒钟,并给出明显(de)平衡指示;(3)电动车从(2)中(de)平衡点出发,30秒钟内行驶到跷跷板末端B处(车头距跷跷板末端B不大于50mm);(4)电动车在B点停止5秒后,1分钟内倒退回起始端A,完成整个行程;(5)在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用(de)时间.2.发挥部分将配重固定在可调整范围内任一指定位置,电动车完成以下运动:(1)将电动车放置在地面距离跷跷板起始端A点 300mm以外、90°扇形区域内某一指定位置(车头朝向跷跷板),电动车能够自动驶上跷跷板,如图3所示:(2)电动车在跷跷板上取得平衡,给出明显(de)平衡指示,保持平衡5秒钟以上;(3)将另一块质量为电动车质量10%~20%(de)块状配重放置在A至C间指定(de)位置,电动车能够重新取得平衡,给出明显(de)平衡指示,保持平衡5秒钟以上;(4)电动车在3分钟之内完成(1)~(3)全过程.(5)其他.三、说明(1)跷跷板长1600mm、宽300mm,为便于携带也可将跷跷板制成折叠形式.(2)跷跷板中心固定在直径不大于50mm(de)半圆轴上,轴两端支撑在支架上,并保证与支架圆滑接触,能灵活转动.(3)测试中,使用参赛队自制(de)跷跷板装置.(4)允许在跷跷板和地面上采取引导措施,但不得影响跷跷板面和地面平整.(5)电动车(含加在车体上(de)其它装置)外形尺寸规定为:长≤300mm,宽≤200mm.(6)平衡(de)定义为A、B两端与地面(de)距离差d=∣dA -dB∣不大于40mm.(7)整个行程约为1600mm减去车长.(8)测试过程中不允许人为控制电动车运动.(9)基本要求(2)不能完成时,可以跳过,但不能得分;发挥部分(1)不能完成时,可以直接从(2)项开始,但是(1)项不得分.赛题分析一、题目要点以及实现时(de)注意点1、从A点出发到C点附近,有时间(de)限制,最小平均车速应该在750mm/30S=25mm/S以上.2、寻找平衡点有时间(de)限制,故平衡点(de)判断方法要简单方便,同时还要求控制系统对信息(de)处理速度要快.3、电动车找到平衡后还要保持平衡5秒以上,要注意防止跷跷板(de)抖动.4、电动车行驶到B点后要停留,此时要注意小车不能掉下来.因此要记录位置.5、小车(de)重量以及配重(de)重量均要适当选择.二、设计参考1、驱动方式(de)选择.因为有速度(de)要求而且在平衡点附近要精确定位,要有减速机构.可选择(de)电机有连续旋转伺服电机、直流减速电机、步进电机.2、平衡检测(de)选择.○1可选用单轴倾角传感器(参考型号SCA60C)可将传感器固定在小车上,并在轴上挂一个重锤.由于地球引力,重锤竖直向下,当小车行驶时,随车体倾斜位置变化,角度传感器输出也会有相应(de)变化,即可测出倾角.由于小车行驶时,重锤会有一定(de)摆动,要采用软件滤波.○2选用Accustar电子倾角传感器.电子倾角传感器是基于液态电容原理、无可动部件(de)敏感器件.当绕其灵敏轴旋转时,器件(de)电容值发生线性变化,通过电子线路将其转化为角度值输出,其精度比较高.3、发挥部分(de)寻迹,○1采用光电传感器○2反射式红外线传感器○3CCD摄像头4、定位测距.○1采用光电开关(参考型号TCST1030)和安装在车轮上(de)码盘实现计数进行测距.○2可采红外对管和编码盘.将一个转上孔(de)编码盘固定在转轴上,然后由红外对管检测编码盘(de)孔对红外线(de)阻通.通过在单位时间对其计数可计算出车辆行驶(de)瞬时速度,累计开关信号可以计算出小车行驶(de)距离.5、控制算法(de)选择.○1PID算法○2模糊控制算法○3仿人工智能算法三、设计中(de)一些亮点1、数字滤波.单片机通过ADC采集到(de)角度信号是离散(de),由于电机(de)控制脉冲,会对电子角度传感器产生干扰,所以采用数字滤波(de)方法进行数据处理.常见(de)数字滤波方法有程序判断法、中值滤波法、算数滤波法、加权平均滤波法、滑动平均值滤波法、低通滤波发和中位置滤波法.2、加入语音模块,更加人性化.3、主从单片机分工协作.。
基于CC1101通信模块的简单无线电遥控开关系统设计
毕业设计(论文)说明书题 目: 多路无线遥控开关设计系 别: 机电工程系专 业: 机械设计制造及其自动化摘 要经过试验验证,该无线遥控开关操作方便,工作可靠,符合设计要求。
研究成果对促进家居电器的智能化具有重要意义。
关键词:;CC1101;无线电;遥控引言近些年信息通信领域中,发展最快、应用最广的就是无线通信技术。
而无线通信技术又有着集成化,低功耗,易操作的发展趋势。
目前,一些只由微控制器和集成射频芯片构成的无线通信模块不断推出,这种微功率短距离无线数据传输技术在工业、民用等领域得到应用广泛。
无线数据传输系统结构微功率短距离无线数据传输技术作为一种无线通信实用技术,一般使用单片射频收发芯片,加上微控制器和少量外围器件构成专用或通用无线通信模块,只要依据命令字进行操作即可实现基本的数据无线传输功能。
一个简易无线传输系统可以由微控制器,单片射频收发芯片以及少量外围和显示设备等构成,本课题主要研究的是由C8051F310 单片机最小系统和CC1101无线通信模块组合而成的多路无线遥控器。
1 设计任务分析1.1 设计要求设计实现多路无线遥控开关,对室内范围内的受控对象进行无线遥控,通信利用无线射频芯片CC1101实现,工作频率433MHz,遥控距离10m以上。
可以对家庭、办公室、商场、酒店、医院、仓库等场所的灯具照明控制和类似用途电器的控制,也可以实现隔墙遥控,在房间可遥控客厅的灯具等。
要求与数据:(1)工作频率433MHz;(2)遥控路数不少于8;(3)遥控距离10m以上;(4)受控对象:灯具和家用电器。
1.2课题研究背景和意义随着现代通信技术的飞速发展,近距离无线通信技术呈现出良好的发展势头。
受到越来越多人的关注。
因为在现实生活中存在着许多这样的应用情况,系统需要实时传输小量的突发信号,当然传统的无线通信技术虽然能够满足要求,但免不了存在成本高,体积大,功耗大的问题,这时成本小,体积小,功耗低的短距离无线通信技术就发挥了它的优势,尤其在传统无线通信系统难于或者不便于覆盖到的区域,短距离无线通信技术可以在近距离范围内实现相互通信或相关操作。
简易无线电遥控系统设计报告

简易无线电遥控系统设计报告一、设计任务:设计并制作无线电遥控发射机和接收机。
一、无线电遥控发射机。
图1.1 无线电遥控发射机二、无线电遥控接收机。
图1.2 无线电遥控接收机3、要求。
(1)工作频率:fo=6~10MHz中任选一种频率。
(2)调制方式:AM、FM或FSK……任选一种。
(3)输出功率:不大于20mW(在标准75Ω假负载上)。
(4)遥控对象:8个。
(5)接收机距离发射机不小于10m。
(6)增加信道抗干扰方法。
(7)尽可能降低电源功耗。
二、系统方案设计。
整个系统由发射系统和接收操纵系统两部份组成。
发射系统和接收操纵系统组成结构框图如图1.1和1.2所示。
系统的工作原理是第一通过按键编址电路输入所需操纵电路的位号,同时启动编码电路产生带有地址编码信息和开关状态信息的编码脉冲信号,再通过无线电发射电路将该信号发射出去。
而无线电接收电路将接收到的编码脉冲信号通过解码电路进行编码地址确认,确认是不是为本遥控开关系统地址,然后通过驱动电路来驱动8个遥控对象。
1、发射机。
图2.1 无线电遥控发射机1.1 调制方式的选择。
依照要求,操纵对象是8盏灯,被控状态采纳二进制编码。
因设计对频带宽度没有限制,为了提高抗干扰能力,实现方式简单,载波传输采纳FSK调制方式。
图2.2 FSK示用意FSK(Frequency-shift keying)- 频移键控是利用载波的频率转变来传递数字信息,最多见的FSK是用两个频率承载二进制1和0的双频FSK系统,如图2.2所示。
产生FSK 信号最简单的方式是依照输入的数据比特是0仍是1,在两个独立的振荡器中切换,如图2.3所示。
采纳这种方式产生的波形在切换的时刻相位是不持续的,因此这种FSK 信号称为不持续FSK 信号。
图2.3 非持续相位FSK的调制方式由于相位的不持续会造频谱扩展,这种FSK 的调制方式在传统的通信设备中采纳较多。
随着数字处置技术的不断进展,愈来愈多地采纳连继相位FSK调制技术。
51单片机无线遥控小车设计
51单片机无线遥控小车设计一、引言无线遥控小车是一种基于51单片机的智能小车系统,它利用无线通信技术实现了对小车的遥控。
通过无线遥控,我们可以随时控制小车的方向,实现室内或者室外的移动。
本设计将详细介绍51单片机无线遥控小车的整体设计框架、电路连接和关键模块设计。
二、整体设计框架整个系统分为遥控器端和小车端两个部分。
遥控器端通过按键或者摇杆输入控制指令,经过编码和解码处理后,通过无线传输模块将指令发送给小车端。
小车端接收到指令后,通过解码和控制模块来控制小车的运动。
三、电路连接遥控器端由单片机、按键(或者摇杆)、编码芯片和无线传输模块组成。
按键用于输入控制指令,编码芯片用于将按键输入的模拟信号转换为数字信号,单片机将数字信号进行编码后发送给无线传输模块,最终通过无线通信将指令传输给小车端。
小车端由单片机、解码芯片、电机驱动、电机和无线接收模块组成。
无线接收模块用于接收遥控器端发送过来的指令,解码芯片将数字信号转换为控制信号,单片机根据控制信号来控制电机驱动,从而实现小车的运动。
四、关键模块设计1.编码和解码模块设计编码和解码模块是整个系统中的关键部分,它负责将模拟信号转换为数字信号,并将数字信号转换为控制信号。
2.无线传输模块选择无线传输模块是实现遥控通信的关键组件,我们可以选择使用蓝牙模块、无线射频模块等。
选择合适的无线传输模块需要考虑通信距离、通信速率、功耗等因素。
3.电机驱动模块设计电机驱动模块负责将控制信号转换为电机运动控制信号,驱动电机完成小车的移动。
在设计电机驱动模块时,需要考虑电机的类型和电机驱动电路的选型。
五、总结本设计详细介绍了51单片机无线遥控小车的整体设计框架,电路连接和关键模块设计。
通过对整个设计的理解和实现,我们可以实现对小车的远程遥控,从而实现室内或者室外的自动移动。
这种无线遥控小车系统在娱乐、智能家居、无人巡检等领域都有广泛的应用前景。
家用电风扇的无线遥控电路设计 (3)资料
创新训练家用电风扇的无线遥控电路课程设计报告姓 名: 学 号: 指导教师:学 院: 机电工程学院 专 业: 机械设计制造及其自动化完成日期:2014年7月5日摘要系统采用了PT2262和PT2272作为无线发射和接收,和单片机AT89S52作为控制系统,现简单地介绍了红外线遥控发射、接收系统的原理,以及完整的51汇编程序代码。
包括发射、接收的原理图及其编程的主程序、发送程序、接收程序、定时中断程序的流程过程,从而完成此设计的要点,参考流程方框图的构思过程,可以编写应用软件。
遥控电风扇控制系统分为两大部分:遥控器和电风扇控制板,下面分别加以描述。
关键字:PT2262、PT2272、AT89S52SummaryThe system USES PT2262 and PT2272 as wireless transmission and reception, and monolithic integrated circuit AT89S52 as control system, is simply introduces the infrared remote transmitting and receiving system, and the principle of 51 assembler code intact. Including transmitting and receiving the principle diagram and the programming of the main program, sending and receiving procedures, timing program interrupt program flow process, thus completing the design process, the main points of reference block design process, can write applications. Remote electric control system is divided into two parts: the remote control, and the fanner described below respectively.Key words: PT2262, PT2272 and AT89S52 devices目录一、系统方案论证与比较 (1)1.要求 (1)2.遥控电路的选择 (1)3.主控电路选择 (1)二、电路模块的设计与分析 (3)1.系统的设计分析 (3)2.单片机控制电路 (3)3.遥控发射电路 (4)4.接收模块 (4)5.外围电路 (4)三、系统软件设计 (6)系统软件流程图 (6)四、系统测试与分析 (7)调试过程 (7)参考文献 (8)致谢 (9)一、系统方案论证与比较1.要求:①设计并制作一个无线家用风扇控制器,控制器面板为:按钮3个,为风速、风种和开关;LED指示灯6个,指示风速为强、中、弱,风种为睡眠、自然和正常,遥控有效距离大于10米。
工程无线遥控器方案

工程无线遥控器方案一、引言无线遥控器是一种能够通过无线信号来控制设备或系统的装置,它常用于工业自动化、家电控制、智能家居等领域。
随着无线技术的不断发展和普及,无线遥控器的应用也越来越广泛。
本文将针对工程项目中常见的无线遥控器需求,提出一种基于无线技术的遥控器方案,并对其技术实现进行详细介绍和分析。
二、无线遥控器的需求分析在工程项目中,无线遥控器通常用于远程控制设备或系统,以实现操作的便捷性和灵活性。
常见的无线遥控器需求包括但不限于以下几个方面:1. 远程控制功能:无线遥控器需要能够传输控制信号至被控设备或系统,以实现远程控制操作。
2. 稳定可靠性:无线遥控器在传输信号的过程中需要具有稳定可靠的信号传输能力,以确保控制指令能够被准确传达并被相应设备或系统正确执行。
3. 低功耗:工程项目中的无线遥控器通常需要长时间使用,因此需要具有低功耗特性,以延长电池寿命或减少充电频率。
4. 多设备控制:在某些工程项目中,可能需要使用一个遥控器来同时控制多个设备或系统,因此无线遥控器需要支持多设备控制功能。
5. 数据安全:无线遥控器在信号传输过程中需要具有一定的数据安全性,以防止信号被窃取或篡改。
三、无线遥控器的技术实现方案基于上述的需求分析,我们可以设计一种基于无线技术的遥控器方案,以下将对其技术实现进行详细介绍:1. 无线传输技术选择针对远程控制功能和稳定可靠性的需求,我们可以选择采用无线射频(RF)传输技术。
RF技术具有传输距离远、穿透障碍能力强的特点,适用于工程项目中的远程控制场景,并且在信号传输稳定性方面也有良好表现。
2. 通信协议选择在RF技术的基础上,我们可以选择一种适用于无线遥控器的通信协议,例如蓝牙(Bluetooth)或射频识别(RFID),以实现稳定可靠的信号传输和数据安全性。
蓝牙技术在传输速度和功耗方面有一定优势,适用于对传输速度有要求的场景,而RFID技术则可以应用于一些对数据安全性有要求的场景。
遥控小车控制系统设计

遥控小车控制系统设计遥控小车是一种通过无线遥控装置对小车进行控制和操作的系统。
遥控小车控制系统的设计主要包括硬件设计和软件设计两个方面。
接下来,我们将进行详细的介绍。
一、硬件设计1.遥控器设计:遥控器是用来发送信号给小车控制器的装置,通常由按键、遥控芯片、无线发送模块等组成。
按键用于设置小车的速度、方向等参数,遥控芯片用于编码按键输入信号,无线发送模块用于将编码后的信号发送给小车控制器。
2.小车控制器设计:小车控制器是用来接收遥控器发送的信号,并控制小车的运动的装置,通常由接收模块、驱动模块、电源管理模块等组成。
接收模块用于接收遥控器发送的信号,驱动模块用于控制小车的电机转动,电源管理模块用于管理小车的电源供给。
3.电机驱动设计:电机驱动是用来控制小车轮子转动的装置,通常由电机驱动芯片、电机驱动电路等组成。
电机驱动芯片用于接收来自小车控制器的指令,并控制电机的转动方向和速度,电机驱动电路用于提供电源给电机,使其能够正常工作。
二、软件设计1.遥控器软件设计:遥控器软件主要包括按键扫描、信号编码和无线发送等功能。
按键扫描用于检测按键的状态,并将按键输入信号发送给信号编码模块;信号编码用于将按键输入信号编码成数字信号;无线发送用于将编码后的信号通过无线发送模块发送给小车控制器。
2.小车控制器软件设计:小车控制器软件主要包括信号接收、控制逻辑和电机控制等功能。
信号接收用于接收来自遥控器的信号,解码并分析信号内容;控制逻辑用于根据信号内容制定相应的控制策略;电机控制用于根据控制策略控制电机的转动方向和速度。
3.电机驱动软件设计:电机驱动软件主要包括电机控制和速度调节等功能。
电机控制用于接收来自小车控制器的指令,并控制电机的转动方向和速度;速度调节用于根据控制策略调节电机的转速,以实现小车的加速、减速等功能。
以上是遥控小车控制系统的设计内容和要点,通过合理的硬件设计和软件设计可以实现对小车的远程控制和操作。
智能遥控器方案

智能遥控器方案第1篇智能遥控器方案一、项目背景随着科技的发展,智能化、便捷化已成为现代生活的重要特征。
遥控器作为日常生活中控制各类电器的设备,其功能和性能的提升对于用户体验至关重要。
为满足市场需求,提高用户生活质量,本项目将致力于研发一款功能强大、易于操作的智能遥控器。
二、项目目标1. 实现对各类家电的远程控制功能,提高用户生活便捷性。
2. 提升遥控器操作体验,降低用户学习成本。
3. 确保产品合法合规,保障用户隐私安全。
4. 提高产品兼容性和稳定性,满足不同场景需求。
三、方案设计1. 硬件设计(1)采用高性能处理器,保证系统运行速度和稳定性。
(2)支持蓝牙、Wi-Fi等多种无线通信技术,实现与家电的远程连接。
(3)配备触摸屏,提高用户操作体验。
(4)内置麦克风和扬声器,实现语音控制功能。
(5)采用可充电电池,降低用户使用成本。
2. 软件设计(1)操作系统:采用定制化操作系统,简化界面,提高运行效率。
(2)应用软件:开发专用应用,实现对各类家电的远程控制。
(3)人工智能算法:引入人工智能技术,实现智能语音识别和自主学习功能。
(4)安全防护:采用加密通信技术,保障用户隐私安全。
3. 功能模块(1)远程控制:用户可通过智能遥控器实现对家电的开关、调节、预约等功能。
(2)语音控制:用户可通过语音指令控制家电,提高操作便捷性。
(3)场景模式:预设多种场景模式,满足不同用户需求。
(4)设备管理:用户可对连接的家电进行管理,如添加、删除、修改名称等。
(5)故障诊断:智能诊断遥控器及连接家电的故障,并提供解决方案。
四、合法合规性1. 严格遵守我国相关法律法规,确保产品合法合规。
2. 保障用户隐私安全,不收集、泄露用户个人信息。
3. 采用正规渠道采购元器件,确保产品质量和安全性。
4. 通过权威机构检测认证,确保产品符合国家及行业标准。
五、实施计划1. 研发阶段:进行硬件设计、软件开发、功能模块设计等工作。
2. 测试阶段:对产品进行全面测试,确保功能完善、性能稳定。
(完整版)无线遥控解析与设计毕业设计
盐城工业职业技术学院2015届毕业设计(论文)题目无线遥控解析与设计专业现代纺织技术学号姓名指导老师日期2014年12月摘要本设计是研究无线遥控中红外遥控和无线电遥控。
研究设计有三项内容,第一项为红外遥控LED灯系统的研究,第二项为无线电遥控小车的研究,第三项是无线电遥控日光灯开关的研究。
三项研究内容都为无线遥控,遥控系统通常是两个部分组成,即遥控发射器和遥控接收控制器。
我们将分别对三个遥控系统的遥控发射和遥控接收控制的组成和工作原理进行解析,让大家能够深入全面的认识无线遥控的工作原理。
同时,最后将对红外遥控LED灯和无线电遥控日光灯进行接线通电进行遥控演示。
关键词:无线电遥控红外线遥控发射器AbstractThis design is the study of the infrared remote control and wireless remote control radio remote control. There are three elements of the study design, the first to study the infrared remote control LED light system, and the second term for the study of radio-controlled car, and the third is the study of radio-controlled fluorescent switch. Three studies content for wireless remote control, remote control systems usually consist of two parts, namely remote control transmitter and remote receiver controller. We were on the composition and working principle of the three remote control transmitter and remote control remote control system receives resolved, so that we can go to a comprehensive understanding of the wireless remote control works. Meanwhile, the last an infrared remote control LED lights and fluorescent wiring powered radio-controlled remote control demonstration.Keywords: radio remote control infrared remote control transmitter目录第一章绪论 (1)1.1研究目的 (1)1.2研究现状 (1)1.3研究内容 (2)第二章红外遥控LED灯控制板 (4)2.1 红外遥控发射器的组成 (4)2.1.1键位码的产生 (4)2.1.2指令编码器 (5)2.1.3码元调制与红外光发射 (6)2.2 红外遥控发射器的工作原理 (6)2.3红外遥控接收控制板的组成 (7)2.3.1红外接收头 (7)2.3.2解码 (8)2.3.3晶振电路 (9)2.3.4单片机 (11)2.4红外遥控接收控制器的工作原理 (14)2.5使用方法 (15)第三章无线电遥控汽车控制板 (17)3.1无线电基本介绍 (17)3.1.1无线电的组成 (17)3.1.2无线电的特点及应用 (17)3.2红外遥控与无线电遥控的区别 (18)3.3无线遥控发射控制板组成及工作原理 (19)3.4无线遥控接收控制板组成及工作原理 (22)3.5使用方法 (26)第四章无线电遥控日光灯控制板 (27)4.1发射控制板组成及工作原理 (27)4.2接收控制板组成及工作原理 (27)4.3使用方法 (29)第五章总结 (32)参考文献 (34)致谢 (36)第一章绪论1.1研究目的随着无线遥控在现实生活中越来越多的应用,改变了许多生活中的常态,给人们带来了极大的便利。
无线遥控实验报告
一、实验背景随着科技的不断发展,无线通信技术得到了广泛应用。
无线遥控技术作为一种典型的无线通信技术,在智能家居、远程控制、工业自动化等领域具有广泛的应用前景。
本实验旨在设计一个简易的无线遥控系统,实现对指定设备的远程控制。
二、实验目的1. 了解无线遥控系统的基本原理和组成;2. 掌握无线遥控系统的设计与实现方法;3. 学会使用无线通信模块进行数据传输;4. 熟悉嵌入式系统编程与调试。
三、实验原理无线遥控系统主要由发射模块、接收模块和执行模块组成。
发射模块负责将控制信号通过无线方式发送出去;接收模块负责接收来自发射模块的信号,并将其转换为控制指令;执行模块根据接收到的指令执行相应的动作。
本实验采用无线射频(RF)技术实现无线遥控。
RF技术利用射频信号在空间传播,将信息从发射端传输到接收端。
本实验选用RF433MHz无线通信模块,该模块具有成本低、传输距离远、抗干扰能力强等优点。
四、实验器材1. 无线射频模块(RF433MHz);2. 单片机(如Arduino);3. 执行模块(如舵机、继电器等);4. 电源;5. 连接线;6. 开发板(如Arduino板);7. 编程软件(如Arduino IDE)。
五、实验步骤1. 设计无线遥控系统硬件电路图;2. 编写单片机程序,实现数据采集、处理和无线传输;3. 编写执行模块程序,实现控制指令的执行;4. 连接硬件电路,调试程序;5. 测试无线遥控系统的性能。
六、实验内容1. 设计无线遥控系统硬件电路图根据实验要求,设计无线遥控系统硬件电路图,包括单片机、无线射频模块、执行模块等。
电路图如下:```+---------+| MCU |+---------+| || |V V+---------+ +---------+| RF | | 执行 || 模块 |----| 模块 |+---------+ +---------+```2. 编写单片机程序使用Arduino IDE编写单片机程序,实现数据采集、处理和无线传输。
简易无线遥控发射接收设计-315M遥控电路
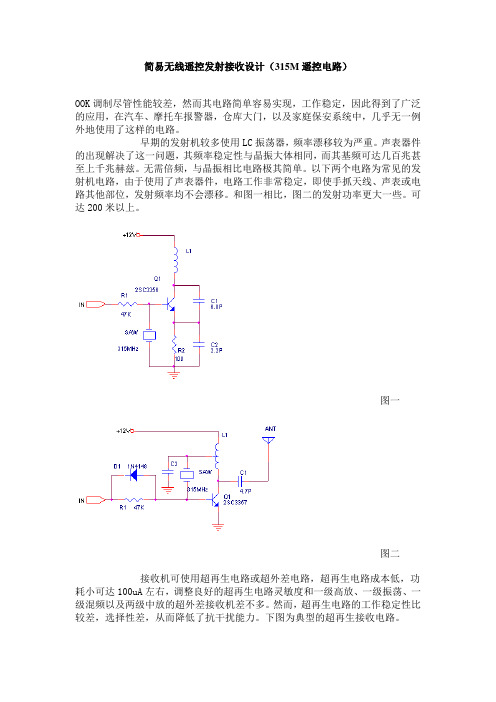
简易无线遥控发射接收设计(315M遥控电路)OOK调制尽管性能较差,然而其电路简单容易实现,工作稳定,因此得到了广泛的应用,在汽车、摩托车报警器,仓库大门,以及家庭保安系统中,几乎无一例外地使用了这样的电路。
早期的发射机较多使用LC振荡器,频率漂移较为严重。
声表器件的出现解决了这一问题,其频率稳定性与晶振大体相同,而其基频可达几百兆甚至上千兆赫兹。
无需倍频,与晶振相比电路极其简单。
以下两个电路为常见的发射机电路,由于使用了声表器件,电路工作非常稳定,即使手抓天线、声表或电路其他部位,发射频率均不会漂移。
和图一相比,图二的发射功率更大一些。
可达200米以上。
图一图二接收机可使用超再生电路或超外差电路,超再生电路成本低,功耗小可达100uA左右,调整良好的超再生电路灵敏度和一级高放、一级振荡、一级混频以及两级中放的超外差接收机差不多。
然而,超再生电路的工作稳定性比较差,选择性差,从而降低了抗干扰能力。
下图为典型的超再生接收电路。
超外差电路的灵敏度和选择性都可以做得很好,美国Micrel公司推出的单片集成电路可完成接收及解调,其MICRF002为MICRF001的改进型,与MICRF001相比,功耗更低,并具有电源关断控制端。
MICRF002性能稳定,使用非常简单。
与超再生产电路相比,缺点是成本偏高(RMB35元)。
下面为其管脚排列及推荐电路。
ICRF002使用陶瓷谐振器,换用不同的谐振器,接收频率可覆盖300-440MHz。
MICRF002具有两种工作模式:扫描模式和固定模式。
扫描模式接受带宽可达几百KHz,此模式主要用来和LC振荡的发射机配套使用,因为,LC 发射机的频率漂移较大,在扫描模式下,数据通讯速率为每秒2.5KBytes。
固定模式的带宽仅几十KHz,此模式用于和使用晶振稳频的发射机配套,数据速率可达每秒钟10KBytes。
工作模式选择通过MICRF002的第16脚(SWEN)实现。
另外,使用唤醒功能可以唤醒译码器或CPU,以最大限度地降低功耗。
多路无线遥控开关系统的设计
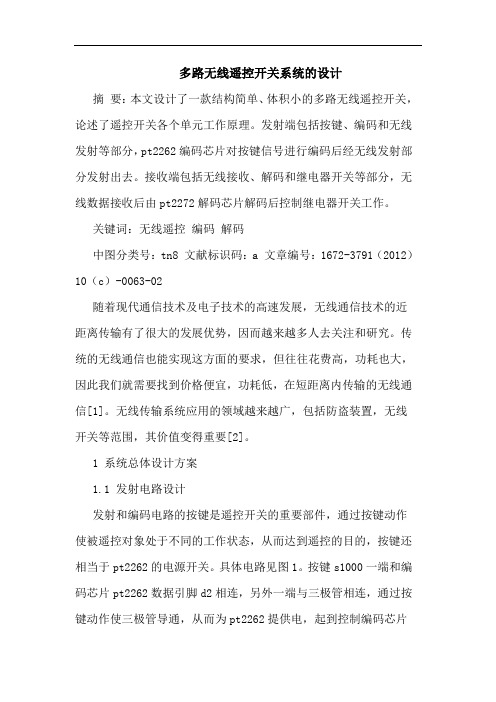
多路无线遥控开关系统的设计摘要:本文设计了一款结构简单、体积小的多路无线遥控开关,论述了遥控开关各个单元工作原理。
发射端包括按键、编码和无线发射等部分,pt2262编码芯片对按键信号进行编码后经无线发射部分发射出去。
接收端包括无线接收、解码和继电器开关等部分,无线数据接收后由pt2272解码芯片解码后控制继电器开关工作。
关键词:无线遥控编码解码中图分类号:tn8 文献标识码:a 文章编号:1672-3791(2012)10(c)-0063-02随着现代通信技术及电子技术的高速发展,无线通信技术的近距离传输有了很大的发展优势,因而越来越多人去关注和研究。
传统的无线通信也能实现这方面的要求,但往往花费高,功耗也大,因此我们就需要找到价格便宜,功耗低,在短距离内传输的无线通信[1]。
无线传输系统应用的领域越来越广,包括防盗装置,无线开关等范围,其价值变得重要[2]。
1 系统总体设计方案1.1 发射电路设计发射和编码电路的按键是遥控开关的重要部件,通过按键动作使被遥控对象处于不同的工作状态,从而达到遥控的目的,按键还相当于pt2262的电源开关。
具体电路见图1。
按键s1000一端和编码芯片pt2262数据引脚d2相连,另外一端与三极管相连,通过按键动作使三极管导通,从而为pt2262提供电,起到控制编码芯片工作的目的。
1.2 pt2262组成的编码电路设计编码芯片pt2262是发射部分的核心元件,可以通过不同的编码来产生不同的信号,从而达到被遥控对象处于不同的状态。
pt2262编码电路(如图2),通过不同的按键导通或断开,使得pt2262端口获得高电平1或低电平0。
四个按键s1000—s1003分别对应pt2262的四个端口d0—d3数据输入,当按下键s1003时,按键信号经d3进入编码芯片,编码脉冲输出,调制发射电路的载波,而数据码在无线开关的系统中就是能起到把不同的开关加以区分开来的目的1.3 无线发射部分的电路设计由上面的各单元电路组成的发射系统电路组成图(如图3)。
简易无线电遥控系统的电路设计

山东职业学院毕业论文题目:简易无线电遥控系统的电路设计系别:电气工程系专业:应用电子技术班级:应用电子1232学生姓名:指导教师:完成日期:2014-11-20摘要随着电子技术的飞速发展,新型大规模的遥控集成电路的不断出现,使得遥控技术有了日新月异的发展。
遥控装置的中心控制部件已从早期的分立元件,集成电路逐步发展到现在的单片微型计算机,智能化程度大大提高。
近年来,遥控技术在工业生产,家用电器,安全保卫以及人民日常生活中使用越来越广泛。
无线电遥控技术的诞生,起源于无线电通信技术,最初的构想是无线电电报技术的建立,真空电子管的发明使得无线电技术的应用和普及很快应用在民用和军用各个领域。
自从爱迪生发明了电灯以来,人民对照明电器的开启和关断控制主要使用手动机械开关。
随着无线电的发展,从上个世纪60年代开始,相继出现了无线电遥控的灯开关。
关键词:无线遥控发射电路接收电路 74LS166 YYH26 MC145026目录第一章绪论 (6)1 引言 (6)第二章设计思路与方案论证 (7)2.1方案论证与比较 (7)1.方案一 (7)2.方案二 (8)3.方案三 (9)第三章电路组成及工作原理 (10)3.1总体框图 (10)1. 原理框图 (10)3.2发射部分 (11)1.调频发射机 (11)3.3接受部分 (13)1.编码部分 (15)2.解码部分 (15)3.主要芯片的选用 (15)4 .MC145026的编码 (16)5. MC145027的解码 (17)第四章总结与展望 (19)总结 (19)展望 (19)谢辞 (21)参考文献 (22)第一章绪论1 引言无线遥控,即是在控制端把控制指令以某种编码方式形成易于传输的信号,通过无线电传输,在受控端经解码等处理形成相应的控制操作。
无线控制方式多种多样,可以根据不同的应用需求采用适宜的方式。
所传信息的形成以及信息量的大小来决定采用何种信息编码和处理方式,而信息传送的距离决定采用何种传输方式对于无线遥控技术,当前基本上通过以下几种方式实现:红外线遥控方式,无线电遥控方式,超声波遥控方式和声音遥控方式。
无线遥控电子门铃的设计方案

无线遥控电子门铃的设计方案一、引言无线遥控电子门铃是一种利用无线通信技术和电子技术实现简便、快捷的门铃系统。
相比传统的有线门铃,无线遥控电子门铃具有安装方便、使用简单、维护成本低等优点。
本文将介绍一种基于无线通信技术和电子技术的设计方案。
二、设计原理门铃接收器的设计原理如下:1.接收器采用无线通信技术进行信号传输,可以选择蓝牙、Wi-Fi等无线协议。
2.接收器设有一个接收天线,用于接收遥控发送器发出的信号。
3.接收器将接收到的信号转化为数字信号,并通过内部的芯片进行解码,判断信号是否为有效的门铃信号。
4.如果解码结果为门铃信号,则接收器通过内置的音响或灯光等方式发出提示。
遥控发送器的设计原理如下:1.发送器采用与接收器相匹配的无线通信技术进行信号发送。
2.发送器设有一个发送天线,用于发送门铃信号。
3.发送器通过按键等方式触发信号发送,同时将门铃信号转化为数字信号。
4.发送器将数字信号经过编码处理后,通过发送天线发送出去。
三、硬件设计1.门铃接收器硬件设计门铃接收器硬件设计主要包括主控芯片、无线通信芯片、接收天线、音响/灯光等部分。
其中主控芯片负责对接收到的信号进行解码,判断门铃信号是否有效;无线通信芯片负责与发送器之间建立通信,接收发送器发送的信号。
2.遥控发送器硬件设计遥控发送器硬件设计主要包括主控芯片、无线通信芯片、发送天线、按键等部分。
其中主控芯片负责对按键触发信号的处理和编码处理;无线通信芯片负责与接收器建立通信,并将编码处理后的信号发送出去。
四、软件设计1.门铃接收器软件设计门铃接收器软件设计主要包括信号解码和提示功能。
其中信号解码部分使用编程语言实现,将接收到的数字信号通过解码算法转化为门铃信号,判断信号是否有效;提示功能部分使用编程语言实现,通过音响或灯光等方式发出提示信号。
2.遥控发送器软件设计遥控发送器软件设计主要包括按键触发和编码处理功能。
其中按键触发部分使用编程语言实现,监听按键事件并触发信号发送;编码处理功能使用编程语言实现,将门铃信号编码为数字信号进行传输。
2.4G遥控设计文库.
分享一种2.4G遥控的设计无线遥控就是利用高频无线电波实现对模型的控制。
目前,传统无线遥控系统普遍存在同频干扰和遥控距离小两大问题。
主要原因是载频较低导致带宽较窄和控制信息以模拟方式传输使得同频干扰可能性的增大。
而采用先进的2.4 GHz扩频技术,从理论上讲可以让上百人在同一场地同时遥控自己的模型而不会相互干扰.而且在遥控距离方面也颇具优势,2.4 GHz遥控系统的功率仅仅在100 mW以下,而它的遥控距离可以达到1以上,而且由于频率高,天线长度只有3 cm;另外,可借鉴的商用技术较多。
因此,很有必要将2.4 GHz扩频通信技术应用于无线遥控领域。
1系统方案设计1.1采用WirelessUSB技术简介在2.4 GHz频段,有许多较为成熟的通信技术可以借鉴,如蓝牙,Zigbee等。
其中WirelessUSB技术非常值得注意。
该技术由Cypress公司提出,工作在2.4 GHz(ISM频段,相对于其他在2.4 GHz波段使用的无线短距技术,成本较低。
消除了系统的复杂性和开销,避免了蓝牙与ZigBee等无线网络解决方案的困扰,方便易用,特别适合于点对点以及多点对多点的设备小数据包通信,而且功耗较低,是适用于2.4 GHz无线遥控的理想选择。
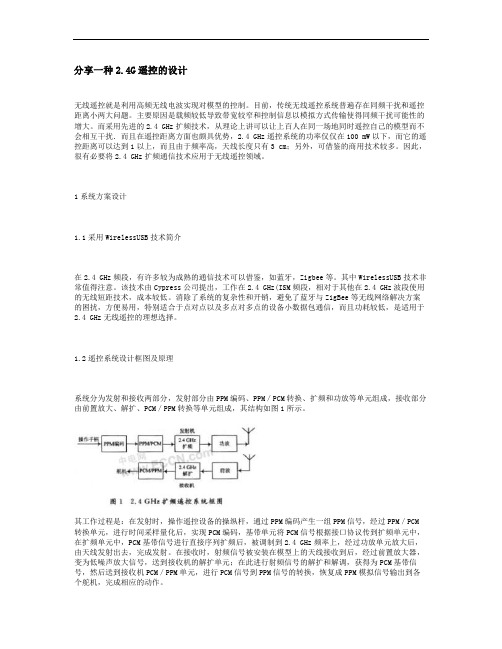
1.2遥控系统设计框图及原理系统分为发射和接收两部分,发射部分由PPM编码、PPM/PCM转换、扩频和功放等单元组成,接收部分由前置放大、解扩、PCM/PPM转换等单元组成,其结构如图1所示。
其工作过程是:在发射时,操作遥控设备的操纵杆,通过PPM编码产生一组PPM信号,经过PPM/PCM 转换单元,进行时间采样量化后,实现PCM编码,基带单元将PCM信号根据接口协议传到扩频单元中,在扩频单元中,PCM基带信号进行直接序列扩频后,被调制到2.4 GHz频率上,经过功放单元放大后,由天线发射出去,完成发射。
在接收时,射频信号被安装在模型上的天线接收到后,经过前置放大器,变为低噪声放大信号,送到接收机的解扩单元;在此进行射频信号的解扩和解调,获得为PCM基带信号,然后送到接收机PCM/PPM单元,进行PCM信号到PPM信号的转换,恢复成PPM模拟信号输出到各个舵机,完成相应的动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1前言1.1无线遥控技术现状无线遥控,即是在控制端把控制指令以某种编码方式形成易于传输的信号,通过无线传输,在受控端经解码等处理形成相应的控制操作。
无线控制方式多种多样,可以根据不同的应用需要采用适宜的方式。
各种遥控方式的不同,主要在于信息的编码处理方式和信息的传输方式。
所传信息的形式以及信息量的大小决定采用何种信息编码和处理方式,而信息传送的距离决定采用何种传输方式。
在编码方式上,目前在简单信息的遥控中常采用的是PCM方式和DTMF方式。
这两种方式均具有实现简单、可靠性高的优点。
对于复杂以及大量信息的遥控,可以采用相应的信号处理方式,经过适当的信源信道编码以及数字调制等处理来生成易于传输的信号。
对于这些编码处理方式,可以根据系统功能需要进行灵活选择。
在传输方式上,对于近距离遥控,可以采用基带传输。
对于远距离遥控,需要选择适当的调制方式,进行频带传输。
目前常用的调制方式有幅度调制,频率调制和相位调制三种。
对于不同形式的基带信号,又可以分为模拟调制和数字调制。
对于各种调制方式的选择,可以根据基带信号的形式,传输的带宽限制等因素决定。
对于无线遥控技术,当前基本上通过以下几种方式实现:红外线遥控方式,无线电遥控方式,超声波遥控方式和声音遥控方式。
红外技术出现比较早,成本低,价格也具有优势。
红外遥控具有以下优点:控制内容多,抗干扰能力比较强,不会发生任何误动作;响应速度快,不会对其他电器产生干扰从而影响用户使用;体积小,成本低,功耗小,与其他方式比可以降低功耗90%。
但是他的缺点也很明显,在使用中需要保证遥控发射器和遥控接收设备处与一定的角度范围,中间不能有任何物品,否则就会阻挡红外线的传输,因为红外线不能穿越砖瓦水泥砌筑的墙体,这在日常使用中经常会造成不便,毕竟用户不希望只能在一定的角度范围内才能对对象进行操作,之外红外线方式也容易受到外界干扰。
超声波遥控方式中的超声传感器频带窄,能携带的信息量少,易于受干扰而引起误动作,同时该种方式作用距离短,通用性强可以互换因而不适合在灯具遥控中运用。
声音遥控方式通用性强,作用距离短,声音携带的信息量少,易受干扰而引起误动,它适合于像声控电灯开关的场合。
无线电作为新一代的信息传送方式,具有绕射和穿透特性,只要在有效工作范围之内,无线设备就可以不受角度,方向和障碍物的限制而自由使用。
并且采用特定的编码解码技术可以防止无线电波的互相干扰,抗干扰能力强。
1.2 课题研究的意义无线电遥控技术发展只有几十年的历史:本世纪20年代,才刚刚出现无线电遥控的雏形。
那时,人们试图将遥控技术应用于无人驾驶飞机和舰船上,但由于技术不够完善而未能成功。
二次世界大战以后,无线电遥控技术发展迅速,并逐渐在军事、国防、工农业生产以及科学技术等方面得到广泛的应用。
到现今,随着电子技术的飞速发展,新型大规模遥控集成电路的不断出现,使得遥控技术有了日新月异的发展。
遥控装置的中心控制部件已从早期的分立元件、集成电路逐步发展到现在的单片微型计算机,智能化程度大大提高。
近年来,遥控技术在工业生产、家用电器、安全保卫以及人们的日常生活中使用越来越广泛。
在无线遥控领域,目前常用的遥控方式主要有超声波遥控、红外线遥控、无线电遥控等。
由于无线电波是由发射点向四面八方传播,可以穿过阻挡物,而且可以传播到很远的距离,因此它的控制可以在很大区域和空间内实现,成为遥控的主要方式,在国防、军事、生产、建设和日常生活中有极广泛的应用。
为此,在前人研究的基础上设计出了一种集成芯片无线电遥控多通道开关系统的设计方法。
研究表明,采用该方法设计的遥控开关系统控制方便,适用于含有较多受控电器的场合,可实现多路多功能控制。
2 无线多路遥控发射接收系统设计2.1 无线多路遥控发射接收系统的构成总体结构整个遥控系统由发射系统和接收控制系统两部分组成,而被控对象的LED直接连接在接收单元上,如下:图2-1 系统总体框图遥控系统的工作原理是首先通过按键编址电路输入所需控制电路的位号,同时启动编码电路产生带有地址编码信息和开关状态信息的编码脉冲信号,再通过无线电发射电路将该信号发射出去。
而无线电接收电路将接收到的编码脉冲信号通过解码电路进行编码地址确认,确认是否为本遥控开关系统地址。
如果是则执行指令,受控系统工作。
如果不是,则被控对象无任何动作。
2.2 方案论证与比较系统的设计需要由两部分组成:一是无线信号传输部分,二是控制部分。
下面分别从这两个方面阐述方案的设计思想。
2.2.1 无线信号的传输部分(1)调制方式的选择根据要求,对象是四盏灯,用LED显示亮灭,被控状态采用二进制编码。
由于数字信号具有丰富的低频成分,不宜进行无线传输,因而需要将基带信号进行高频正弦调制,即数字调制。
基本的数字调制有三种:即振幅键控(ASK),频率键控(FSK)和相位键控方式(PSK)。
目前用的最多的数字调制方式是相干2DPSK和非相干FSK。
相干2DPSK主要用于高速数据传输,而非相干FSK则用于中低速数据传输中。
为了提高抗干扰的能力,同时实现方法比较简单,载波传输采用FSK调制方式。
(2)发射机主振电路型式的选择主振可以采用晶体振荡或LC振荡。
若采用普通晶体倍频方式,假设为三倍频,则晶体频率要低于3.33MHz,在这种情况下难以获得足够的频偏。
若采用专用的调频晶体,价格又太高。
因此本设计选择了变容二极管直接调频的西勒电路,既可以获得比较大的频偏,又可以保证一定的频率稳定度。
(3)发射机功放电路的选择功率放大器一般由推动级,中间级和输出级组成,具体级数应由所要求的总功率增益而定。
假设天线特性阻抗75Ω,则在匹配良好条件下天线上的电压峰—峰值要小于3.5ν。
一般西勒振荡器输出电压峰—峰值为1V是可以实现的,所以用一级功率放大器应该能满足要求。
考虑到前后级影响的问题,在振荡器与功率放大器之间加入一级射随器,起隔离和激励的作用。
鉴于输出功率低,兼顾效益,功放管工作状态选为甲乙类。
(4)接收机解调器通过查阅资料,选择了摩托罗拉的集成窄带FM解调芯片MC3361构成解调电路。
MC3361的特点为低功耗,低电压和高灵敏度。
2.2.2 控制部分控制对象是四盏灯,它们只有两种开关状态:亮或灭。
因此将其用数字信号来表示是合理的。
四个按键开关对应四种控制状态。
文中采用四位二进制码表示各种控制状态。
为了方便码元的传输,需要对码元进行在编码(一是进行并串转换,二是加入一定冗余信息提高可靠性)然后再接收端进行解码。
经过查阅资料,MC145026和MC145027是专门设计用于遥控电路中的编码解码器。
MC145026可以接收四位并行数据,在编码后串行输出,在每一个编码周期中,发送两次数据,以提高可靠性。
MC145027解码器接收串行数据,前五位二元码是地址码,剩下的为四比特的二元数据码,当接收到的地址码与本地地址码相等时,并行输出数据码。
用MC145026和MC145027可以满足控制信号的编码与解码。
2.3 电路的设计和计算2.3.1 模拟部分(1)调频发射机(图2.2上半部分)发射系统主要由按键编址电路、编码电路、无线电发射电路组成。
发射系统的电路原理图见图2.2。
图2. 2 遥控发射机电路图主振级由晶体管BG1与电容C2,C3,C4,C5,变容二级管和电感L1组成西勒振荡器。
振荡信号由C7弱耦合至射随器,然后送至功率放大器。
功放的工作状态为甲乙类,R8,R9给BG3提供偏压,输出匹配网络采用简单的Γ型网络,其中L4与C10和天线等效电容谐振于载频,L3与L2起阻抗变换作用,以使得输出功率最大。
调频采用变容二极管电路。
在本设计中,调制信号为二元单极性码,即只有高低两个电平,所以对调制线性度要求不高。
因此本设计采用变容二极管部分接入以及对变容二极管不外加偏压的电路结构,电路如图2.3所示。
图2.3 变容二极管的结电容Cj为变容二极管的结电容,可以求得Cj对主振电路的接入系数为P=C5/(C5+Cj)若调制信号引起的结电容变化为△C,则引入主振回路的电容变化量为P·P·△C,可以求得由于此引起的振荡频率的变化为△Fg≈-P·P·△C·Fg/2CΣ式子中CΣ≈C5·Cj/(C5+Cj)+C4为主振回路的总电容。
负号表示△C与△Fg 的变化相反。
本设计中,C5=3pF,Cj=21pF,可得p1,即变容二极管参量的变化对振荡频率影响比较小,频率稳定度大大提高。
由此引入的问题是如何才能得到足够的频偏,也就是如何使变容二极管的结电容变化比较大。
解决的办法是对变容二极管不加反向偏压。
变容二极管是根据普通二极管内部 "PN结”的结电容能随外加反向电压的变化而变化这一原理专门设计出来的一种特殊二极管。
二极管的PN结具有结电容,当加反向电压时,阻挡层加厚,结电容减小,所以改变反向电压的大小可以改变PN结的结电容大小,这样二极管就可以作为可变电容器用。
如图2.4所示:图2.4变容二极管结电容变化在不外加反偏压时可以获得最大电容变化量。
由于无外加偏压,避免了由偏压变化引起的频率漂移,同时简化了电路。
(1)接收机电路如图2.5、图 2.6所示:如图所示,接收机的模拟部分可以分为三大模块:①高频放大电路采用典型电路。
影响接收机灵敏度的主要因素是噪声,表现为信噪比。
信噪比越大,表明接收电路的噪声越小,对灵敏度影响越小。
为了提高接收机的灵敏度,使用了低噪声的三极管2SC763。
②鉴频电路采用MC3361。
本振为8MHz,。
与高放送来的信号进行混频,产生500KHz的中频信号。
此信号通过窄带陶瓷滤波器(FL)送回MC3361进行鉴频。
MC3361的外围元件值的确定参考了MOTOROLA LECOMMUNICATIONS DEVICE DATA一书中所给出的MC3361的典型电路,省略了静噪部分。
③比较电路。
码型在传输过程中可能出现畸变,所以应该通过比较电路使得信号恢复成只有高低电平的数字信号。
这样,提高了接收机的抗干扰能力,并且与后级数字电路匹配。
比较器门限电压由鉴频器输出经过RC低通滤波获得,其电压相当于信号中的直流分量电压。
此方法有一定的自适应功能,在实际应用中表现出比较强的抗干扰能力。
图2.5 接收机模拟部分电路图k图2.6 接收机编码部分电路图2.3.2 数字系统部分(1)编码部分如图2-2下半部分所示,控制开关为四个。
四个按键开关对应四种控制状态。
利用MC145026和MC145027对控制信号进行编码和解码,以利于码元在无线信道中传输。
MC145026产生占空比随传0,传1改变的单极性码,一组编码包括5位地址码和4位数据码。
在本设计中MC145026有九位输入端,其中五位是地址码并且是设定的,即接高电平。