simulink及模型转换
Simulink模型到Modelica模型转换技术
Simulink模型到Modelica模型转换技术作者:董政丁建完来源:《计算机辅助工程》2016年第05期摘要:针对Simulink模型重用到更高阶的Modelica平台上的需求,分析Simulink模型的数学本质和代码表达,以及Modelica对外部函数和外部类的支持,重用Simulink模型转换生成的S-function目标C代码,实现Simulink模型到Modelica模型转换.关键词: Simulink; S-function; Modelica;模型转换中图分类号: TP391.9 文献标志码: B0 引言随着数字化功能样机技术和仿真技术的发展,近几十年来涌现出许多成熟的建模仿真分析工具,并广泛应用于机械、电子、控制等领域中,使得对集机械、电子、液压、控制等多个学科领域子系统于一体的复杂产品的整体系统进行分析成为可能.多年以来,Simulink以其基本模块的易用性和通用性,被广泛应用于控制系统的建模.同时,为满足物理系统建模,MATLAB 官方和第三方均提供多种扩展工具模块,但是实际使用时,扩展工具模块往往难以满足使用需求.越来越多的使用者发现针对复杂物理系统,Simulink存在着建模难度大并且耗费时间多的问题.欧洲学者针对复杂物理系统统一建模,提出多领域统一建模语言——Modelica语言,实现对复杂产品整体统一建模分析,并使之成为复杂系统建模领域的标准.目前,Modelica语言已有较大的发展,针对其开发的标准模型库更是迅猛增长,已覆盖机械、液压、气压、电控、热力和电磁等多个领域,并在欧美汽车、能源、动力、机电、航空和航天等各行业获得成功应用.[1]虽然Modelica的应用已推进复杂物理系统的建模和仿真发展,但是控制系统工程师依然习惯利用Simulink进行控制系统的建模和仿真,而其他设计工程师使用Modelica建立物理系统模型.长期以来,大量的知识已经以Simulink模型的方式累积下来,如果把这些模型用Modelica重写,十分耗费时间和精力.基于Modelica语言在多领域建模和仿真中的广泛应用以及未来发展趋势,可以考虑将控制系统Simulink模型转换成Modelica模型,使系统模型在统一的Modelica平台下进行仿真.有学者提出一种“模块映射”方案,通过在Modelica平台中建立与Simulink基本模块对应的模型库元件,并按照Simulink模型模块和连接关系,用Modelica 元件代替Simulink模块并复现连接关系,实现模型转换.[2-3]这种方案依赖于专门定制的Modelica模型库元件.然而,部分Simulink基本模块,如积分模块等,有多种变形模式,要设计一种Modelica元件与其对应的难度很大.对此,本文提出一种基于Simulink模型代码生成和Modelica外部类和函数接口实现Simulink模型到Modelica模型转换的新方案.1 模型转换原理1.1 Simulink模型描述Simulink模型中包含时间Simulink通常用模块和连接关系表达模型.通过MATLAB提供的代码生成工具RTW (Real-Time Workshop)把模型转换成S-Function目标C代码后,Simulink模型中的数学描述就变成代码描述.Simulink模型转换成C代码后,Simulink模型原有的所有变量信息都保存在SimStruct实例中,SimStruct是S-Function目标C代码中定义的类,代码中还定义用于对SimStruct操作的接口函数.Simulink求解器通过对接口函数的调用,对用C代码描述的Simulink模型进行仿真,仿真流程见图1,仿真主要包含初始化和循环求解2个阶段.初始化阶段由mdlInitializeSizes,mdlStart和mdlInitializeSampleTimes函数实现采样时间、状态向量、输入向量的初始化.在循环求解阶段中,modelOutputs函数用C代码的方式描述关系式1.4 Modelica外部类类是Modelica语言的基本结构元素,是构成Modelica模型的基本单元,类可以包含3种类型:变量、方程和成员类.变量表示类的属性,通常代表某个物理量;方程指定类的行为,表达变量之间的数值约束关系.[1]通常,类定义在Modelica内部,类的变量、方程和成员类均以Modelica语言描述,对内是可见的.Modelica同时支持外部类.外部类一般由C语言定义,对于Modelica相当于一个“黑箱”,只暴露其操作的接口,内部结构完全封闭.外部函数协作完成某一任务时,这些外部函数之间需要传递一些信息的内部存储,外部类的实例就可以表示这种内部存储.在Modelica语言中,外部类同样以class作为关键字,但加上extends ExternalObject关键字修饰,表明从ExternalObject派生,并且仅有3个函数constructor和destructor,分别用于构造和销毁外部实例.外部类实例通常为一个指向某类实例的指针,见图3.定义SimStructPrt外部类并且定义类构造函数.构造函数由外部函数实现,SimStructPrt实例即为指向SimStruct实例的指针.3 结论通过对S-function目标C代码分析和对Modelica外部类及外部函数的研究,实现Simulink模型到Modelica模型的转换,使得Simulink模型可以在Modelica平台下进行仿真.模型转换重用Simulink模型,可以将多年来累积在Simulink模型中的知识重用到更高阶的Modelica平台上,提高工作效率.由于无须依赖定制的模型库,实施起来方便高效,并且由Simulink自带的代码生成工具生成C代码,代码稳定可靠,鲁棒性高.参考文献:[1]赵建军,丁建完,周凡利,等. Modelica语言及其多领域统一建模与仿真机理[J]. 系统仿真学报, 2006, 18(S2): 570-573. DOI: 10.3969/j.issn.1004-731X.2006.z2.162.ZHAO J J, DING J W, ZHOU F L, et al. Modelica and its mechanism of multi-domain unified modeling and simulation[J]. Journal of System Simulation, 2006, 18(S2): 570-573. DOI: 10.3969/j.issn.1004-731X.2006.z2.162.[2] DEMPSEY M. Automatic translation of Simulink models into Modelica using Simelica and the AdvancedBlocks library[C]//Proceedings of the 3rd International Modelica Conference. Linkping, 2003.[3] 王岳. 多领域建模仿真平台MWorks的外接工具集成研究[D]. 武汉:华中科技大学,2009.[4] van SCHIJNDEL A W M. A review of the application of SimuLink S-functions to multi domain modelling and building simulation[J]. Journal of Building Performance Simulation, 2014,7(3): 165-178. DOI: 10.1080/19401493.2013.804122.。
matlab simulink 转换为c代码
matlab simulink 转换为c代码
MATLAB Simulink是一种广泛使用的图形化建模和仿真工具,可用于设计、模拟和验证动态系统。
当使用Simulink建立模型并完成仿真后,我们可以将Simulink模型转换为C代码,以便在其他平台上进行部署和实际应用。
将Simulink模型转换为C代码,可以通过以下步骤实现:
1. 打开Simulink模型,确保模型已经建立并且可以成功运行。
2. 在Simulink模型中的顶部菜单栏中,选择“Simulation”选项。
3. 从下拉菜单中选择“Configuration Parameters”。
4. 在弹出的对话框中,选择“Code Generation”选项。
5. 在右侧窗格中,可以设置生成C代码的相关选项,如选择生成代码类型、选择生成代码目标等。
6. 调整所需的选项后,点击“OK”以保存设置并关闭对话框。
7. 回到Simulink模型中,点击顶部菜单栏中的“Code”选项。
8. 在下拉菜单中,选择“C/C++ Code”选项。
9. 在弹出的对话框中,选择代码生成的路径和文件名,并点击“Save”以保存设置。
10. 在生成过程完成后,会在指定路径下生成对应的C代码文件和相应的头文件。
这样,我们就成功将Simulink模型转换为C代码。
生成的C代码可以在其他平台上进行编译和部署,用于实际应用中。
注:本文仅讨论了将Simulink模型转换为C代码的简要步骤,实际操作中可能涉及更多细节和特定设置,具体操作可参考Simulink 的文档和教程。
simulink转化为model reference -回复

simulink转化为model reference -回复如何将Simulink模型转化为Model Reference一、引言Simulink是MATLAB的一个重要工具箱,用于进行系统建模、仿真和模型基于代码的开发。
在构建复杂系统模型时,将模型拆分为多个模块并分别开发可以提高模型的可读性和可维护性。
而Model Reference是Simulink的一个功能,可以帮助用户将模型分解为可重用的组件,从而简化系统的设计和开发过程。
本文将详细介绍如何将Simulink模型转化为Model Reference,并给出具体的步骤和示例。
二、了解Model Reference在进行Simulink模型转化为Model Reference之前,首先需要了解Model Reference的基本概念和特性。
Model Reference是一种将大型模型分解为可重用的组件的方法,每个组件对应一个独立的Simulink模型。
这些组件可以将模型分离为更小的部分,便于集中精力进行开发和测试。
Model Reference具有以下特性:1. 可重用性:Model Reference可以作为模板,用于构建多个相似的模型。
2. 分层设计:通过将模型分解为多个模块,可以减少系统复杂性,提高可维护性。
3. 代码生成:Model Reference可以方便地生成可独立运行的代码,用于实际的部署和测试。
4. 仿真效率:Model Reference允许并行仿真,从而提高仿真效率。
三、将Simulink模型转化为Model Reference的步骤接下来,将介绍如何将Simulink模型转化为Model Reference的具体步骤。
步骤一:准备工作在将Simulink模型转化为Model Reference之前,需要完成一些准备工作:1. 组织好模型结构:确保模型的层次结构清晰,并且各个模块之间有良好的接口定义。
2. 确保模型可以正常运行:在进行模型转化之前,必须确保模型可以顺利运行,并且输出结果正确。
simulink中convert的用法(一)
simulink中convert的用法(一)Simulink中Convert的用法Simulink是一个功能强大的模拟和建模环境,通过它可以进行系统级设计、仿真和构建嵌入式系统。
Convert是Simulink中一个常用的功能,用于将信号从一种数据类型转换为另一种数据类型。
本文将介绍Simulink中Convert的用法,包括以下几个方面:1. Convert的含义Convert用于对信号的数据类型进行转换,例如将模拟信号转换为数字信号、将浮点数转换为整数等。
这对于系统级仿真和控制算法开发非常重要,因为不同的组件和算法可能需要特定的数据类型输入。
2. Convert的函数及参数在Simulink中,Convert可以通过使用相关的函数进行操作。
以下是一些常用的Convert函数及其参数的介绍:•Data type conversion:将信号从一种数据类型转换为另一种数据类型。
参数包括输入信号、目标数据类型等。
•Lookup table:通过查找表将离散输入值转换为对应的输出值。
参数包括输入信号、查找表数据等。
•Data type propagation:自动根据上游信号类型选择输出数据类型。
参数包括输入信号等。
3. Convert的应用场景Convert可以在多个应用场景中使用,下面列举一些常见的应用场景:数据类型转换Convert可以将信号从一种数据类型转换为另一种数据类型,常见的转换包括模拟信号到数字信号的转换、浮点数到整数的转换等。
这在系统级仿真和算法开发中非常常见。
查找表Convert中的查找表功能可以通过提供一张查找表将输入值转换为对应的输出值。
这在控制算法中经常用于实现非线性映射或者将具体数值映射为离散状态。
数据类型传播Convert还可以根据上游信号的数据类型自动选择输出信号的数据类型,这对于设计复杂系统时非常有用。
通过将数据类型传播到整个模型,可以减少手动指定数据类型的工作量。
simulink转换为matlab代码

simulink转换为matlab代码Simulink是一个用于模型驱动设计的工具,可以帮助工程师在Matlab环境中进行系统级建模、仿真和分析。
在Simulink中建立的模型可以通过生成Matlab代码来进一步进行分析和优化。
本文将介绍如何将Simulink模型转换为Matlab代码,以便读者了解如何在Matlab中使用Simulink模型。
打开Simulink并加载您要转换为Matlab代码的模型。
确保模型已经完成并准备好进行转换。
然后,点击Simulink界面上的“Tools”菜单,选择“Model Verification”选项。
在弹出的对话框中,选择“Generate Report”选项,并在下拉菜单中选择“Model to Code”选项。
点击“Generate”按钮,系统将自动生成Matlab代码。
生成的Matlab代码将包括模型中的所有组件和参数设置。
您可以将代码保存为.m文件,以便在Matlab环境中进行加载和修改。
在Matlab中打开生成的代码文件,您将看到与Simulink模型相对应的Matlab脚本。
您可以根据需要修改代码,并在Matlab命令窗口中运行以验证模型的功能。
通过将Simulink模型转换为Matlab代码,您可以更方便地在Matlab中进行模型分析和优化。
您可以使用Matlab的各种工具和函数来进一步处理模型,并与其他Matlab代码集成。
这种转换还可以帮助您更好地理解模型的结构和行为,从而更好地优化系统设计。
将Simulink模型转换为Matlab代码是一个简单而有效的方法,可以帮助工程师更好地利用Matlab的功能来分析和优化系统设计。
通过这种转换,您可以更好地理解和处理模型,提高工作效率并优化系统性能。
希望本文对您有所帮助,谢谢阅读!。
simulink及模型转换解析
输入源模块source功能:
模块名 Constant Signal Generator Step Ramp 功能简介 常数 信号发生器 阶跃信号 线性增加或减少的信号
Sine Wave
Repeating Sequence
Simulink库浏览器
模型窗口
Simulink最让人振奋的一点就是支持图形用户界面。
SIMULINK的基本操作
1、SIMULINK窗口:库浏览器、 SIMULINK模型窗口 2、 SIMULINK模块操作: 模块是建立SIMULINK模型的基本单元,用适当的方式把各种 模块连接在一起就能够建立任何动态系统模型。
x' = Ax+Bu y = Cx+Du State-Space
Continuous-Time Delays
To
Ti
Transfer Fcn
Zero-Pole Memory Transport Delay
传递函数
零-极点模型
Transport Delay
Variable Variable Time DelayTransport Delay
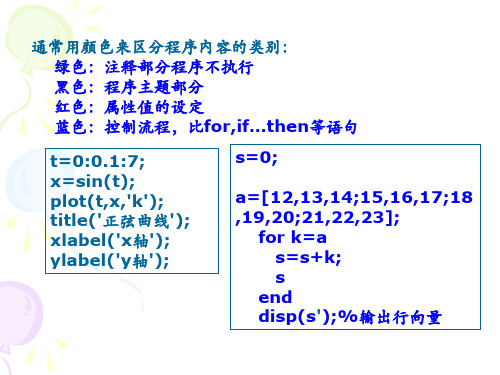
通常用颜色来区分程序内容的类别: 绿色:注释部分程序不执行 黑色:程序主题部分 红色:属性值的设定 蓝色:控制流程,比for,if…then等语句
t=0:0.1:7; x=sin(t); plot(t,x,'k'); title('正弦曲线'); xlabel('x轴'); ylabel('y轴');
Manual Switch
Mutiport Switch Coulumb & Viscous Friction
第04讲 MATLAB-simulink控制系统的数学模型及其相互转换
3. 部分分式形式 传递函数也可表示成部分分式或留数形式,即 n ri G( s) h( s ) i 1 s pi 式 中 : pi(i=1,2,…,n) 为 该 系 统 的 n 个 极 点 , ri (i=1,2,…,n)是对应各极点的留数; h(s)则表示传递 函数分子多项式除以分母多项式的余式。 在 MATLAB 下它也可由系统的极点、留数和 余式系数所构成的向量唯一确定出来,即 P=[p1;p2;…;pn];R=[r1;r2;…;rn]; H=[h0 h1 … hm-n]
函数的返回变量sys为连续系统的状态空间模 型。函数输入参数a,b,c,d分别对应于系统的A,B, 为
0 x(t ) 3 / 2 3 y (t ) 1 0 0 1 0 1 1 1 2 1 / 2 x(t ) 1 1u (t ) 0 4 1 3 0 x(t ) 0
23
在MATLAB控制系统工具箱中,给出一个根据 状态空间表达式求取系统传递函数的函数ss2tf( ), 其调用格式为
[num,den]=ss2tf(A,B,C,D,iu) 其中:iu为输入的代号,即用来指定第几个输入。 对于单变量系统iu=1,对多变量系统,不能用此函 数一次地求出对所有输入信号的整个传递函数阵, 而必须对各个输入信号逐个地求取传递函数子矩阵, 最后获得整个的传递函数矩阵。
例2-3 对于单输入多输出系统
3s 2 s 3 2s 5 G(s) 3s 3 5s 2 2s 1
解 则可将其用下列MATLAB语句表示 >>num=[0 0 3 2;1 0 2 5];den=[3 5 2 1]; >>printsys(num,den) num(1)/den = 3s+2 ----------------------3 s^3 + 5 s^2 + 2 s + 1 num(2)/den = s^3 + 2 s + 5 ----------------------3 s^3 + 5 s^2 + 2 s + 1
Simulink模型转代码及集成方式(Auto.mdl)
Simulink模型转代码及集成方式一、必要文档的介绍:1、存在Auto_Var_Read.xlsx表格、initfilemaker.m文件、testinit.m文件。
Auto_Var_Read.xlsx表格:用于存放模型中需要用到的数据的初始化大小、格式以及所代表的内容。
initfilemaker.m文件:读取表格中的数据,并生成“testinit.m文件”,并运行“testinit.m 文件”。
testinit.m文件:保存模型中使用到的数据(涉及数据的大小及类型等)。
2、Auto_Var_Read.xlsx表格:“Calibratiables表”的内容是一次性给入的,代码集成之后该数据内容不可更改。
“Run_timeV表”的数据只是初始化给入的,代码集成之后该数据是可以更改的。
“Constants表”的内容代表在模型中是常量,也是集成后数据大小不可改。
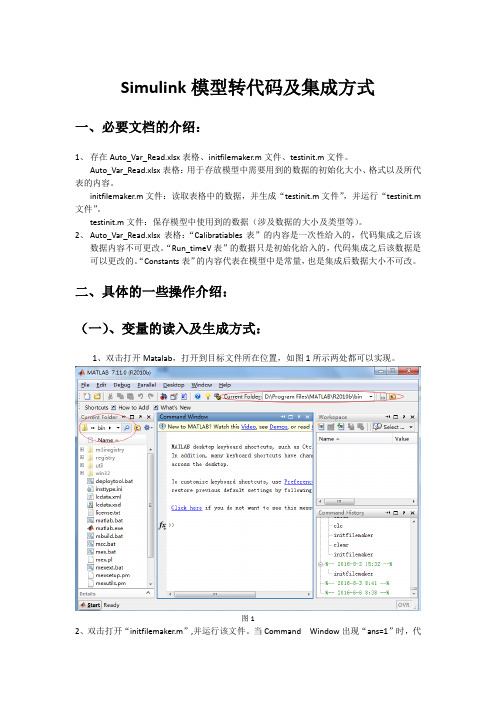
二、具体的一些操作介绍:(一)、变量的读入及生成方式:1、双击打开Matalab,打开到目标文件所在位置,如图1所示两处都可以实现。
图12、双击打开“initfilemaker.m”,并运行该文件。
当Command Window出现“ans=1”时,代表初始化完成。
参考图2、3、4、5所示。
(注:若表格的名字变为“Auto_Var_Read1.3.xlsx”,则相应的修改“initfilemaker.m”中代码:Auto_Var_Read.xlsx换成Auto_Var_Read1.3.xlsx。
)图2图3图4图5(二)、Simulink中现有模型一般介绍:1、选择当前关心的模型“Auto.mdl”,并双击打开,如图6所示。
图62、如图7所示,该模型含有12个子模块。
图73、如图8所示,拿子模块Blower_out为例,图中Blower_Normal_Flag是全局变量,而FDEF_MODE是标定量。
不同之处在于框图的样式。
图84、具体的数据类型可以查看testinit.m,也可以在Command Window下,输入变量名回车。
将SIMULINK模型转换为RTL描述的EDA工具设计
第三章软件环境和VerilogHDL简介第三章软件环境和VerilogHDL简介3.1软件环境在本课题的设计中主要使用了三种软件工具:MATLAB6.5、ModelSimSE5.8d和1SE6'3。
下面对这三种软件作一个简单的介绍。
3.1.1Mathworks的MATLAB6.5MATLAB产品家族是MathWorks公司开发的用于概念设计,算法开发,建模仿真,实时实现的集成环境。
由于其完整的专业体系和先进的设计开发思路,使得MATLAB在多种领域都有广阔的应用空间,特别是在MATLAB的主要应用方向一科学计算、建模仿真以及信息工程系统的设计开发上已经成为行业内的首选设计工具,全球现有上千万的使用者f4】。
图3-t显示了MATLAB的基本窗口。
图3.1MATLAB基本窗口电子科技大学硕士论文3.1.1.1MATLAB的功能简介在MATLAB产品家族中,MATLAB工具箱是整个体系的基座,它是一个语言编程型(M语言)开发平台,提供了体系中其他工具所需要的集成环境(比如M语言的解释器)。
同时由于MATLAB对矩阵和线性代数的支持使得工具箱本身也具有强大的数学计算能力。
MATLAB产品体系的演化历程中最重要的一个体系变更是引入了SIMULINK,用来对动态系统建模仿真。
其框图化的设计方式和良好的交互性,对工程人员本身计算机操作与编程的熟练程度的要求降到了最低,工程人员可以把更多的精力放到理论和技术的创新上去。
针对控制逻辑的开发,协议栈的仿真等要求,MathWorks公司在SIMULINK平台上还提供了用于描述复杂事件驱动系统的逻辑行为的建模仿真工具一Stateflow,通过Stateflow,用户可以用图形化的方式描述事件驱动系统的逻辑行为,并无缝的结合到SIMULINK的动态系统仿真中。
图3—2展示了MATLAB软件包的层次结构。
图3-2MAⅡAB层次结构在MATLAB/sIMuLINK基本环境之上,MathWorks公司为用户提供了丰富的扩展资源,这就是大量的Toolbox和Blockset。
simulink转化为model reference -回复
simulink转化为model reference -回复Simulink is a powerful tool for modeling and simulating dynamic systems. It offers a variety of features that allow users to design and analyze complex systems in a graphical environment. However, as systems become more intricate, managing the Simulink models can become challenging. This is where model reference comes into play.Model reference is a feature in Simulink that enables the modularization and hierarchical organization of Simulink models. It allows users to divide a large, complex system into smaller, more manageable components called referenced models. These referenced models can be reused, shared, and integrated into larger systems, providing an efficient way to handle complex designs.To convert a Simulink model into a model reference, follow these steps:Step 1: Identifying modular componentsThe first step is to identify parts of the Simulink model that can be modularized. These components should have clear inputs andoutputs and perform a specific function. It is important to ensure that the components are decoupled from each other to allow for independent development and testing.Step 2: Creating referenced modelsOnce the modular components have been identified, create a new Simulink model for each component. This model will serve as the referenced model. Copy or move the necessary blocks from the original model into each referenced model, ensuring that all the required connections are maintained.Step 3: Defining inputs and outputsIn the referenced model, define input and output ports to allow for interaction with other components. Inputs represent signals or data that flow into the referenced model, while outputs represent signals or data that flow out of the referenced model. These ports act as interfaces to connect the referenced model with other parts of the system.Step 4: Creating a top-level modelNext, create a new Simulink model that will serve as the top-level model. This model will act as the container for the referencedmodels. Add the referenced models as subsystem blocks in the top-level model and connect them using the input and output ports defined in the referenced models.Step 5: Parameterizing the referenced modelsTo make the referenced models reusable, it is important to parameterize them. Parameters can be added to the referenced models to allow users to customize the behavior of the models without modifying the model structure itself. This enhances reusability and flexibility.Step 6: Testing and simulationOnce the model reference hierarchy is established, it is crucial to test and simulate the system to ensure that the components interact correctly. Verify that the inputs and outputs are correctly connected, and the system functions as expected. Simulate the system with various test cases to validate its behavior and performance.Step 7: Managing and updating the referenced modelsAs the system evolves, it is necessary to manage and update the referenced models. Any changes made to a referenced model willpropagate to all instances of that model in the top-level model. This ensures consistency and eliminates the need to modify individual instances separately.In conclusion, converting a Simulink model into a model reference hierarchy provides an efficient way to manage complex systems. By modularizing the system into referenced models, it becomes easier to develop, maintain, and reuse different components. Thestep-by-step process outlined above enables users to effectively convert a Simulink model into a model reference structure, enhancing the scalability and reusability of their designs.。
simulink模糊pid控制模型转c语言代码 -回复
simulink模糊pid控制模型转c语言代码-回复Simulink模糊PID控制模型转C语言代码Simulink是MATLAB软件中一款用于进行动态系统建模和仿真的工具。
它通过图形化界面提供了易于使用的建模环境,使得用户能够快速构建和测试各种控制系统。
然而,有时我们可能需要将Simulink模型转换为C语言代码,以便在嵌入式系统或其他平台上实现实时控制。
在本篇文章中,我们将介绍如何将Simulink模糊PID控制模型转换为C语言代码。
第一步:理解模糊PID控制器原理在进行代码转换之前,我们先来了解一下模糊PID控制器的原理。
PID 控制器是一种经典的控制器,由比例项、积分项和微分项组成。
它通过对系统实际输出与期望输出的差异进行反馈控制,从而调整系统输入,使得输出接近期望值。
模糊PID控制器与传统PID控制器的主要区别在于它使用了模糊逻辑来处理不确定性和模糊性。
模糊逻辑是一种基于模糊集合理论的控制方法,它可以模拟人的思维方式,通过模糊化的输入和输出变量进行推理和决策。
第二步:在Simulink中设计模糊PID控制模型在Simulink中设计模糊PID控制模型是实现模糊PID控制器代码转换的前提。
我们可以使用Fuzzy Logic Toolbox提供的工具来创建和调整模糊逻辑系统。
首先,我们需要创建输入和输出变量。
输入变量通常是系统的误差(Current Error)和误差的变化率(Error Rate),输出变量一般为控制量(Control Signal)。
然后,我们可以根据实际情况定义模糊集合和模糊规则,以及选择适当的模糊控制器类型(如模糊反向推理控制器或模糊自适应控制器)。
完成模糊PID控制模型设计后,我们可以在Simulink中进行仿真和调试,确保模型能够正确地实现期望的控制效果。
第三步:使用MATLAB Coder将Simulink模型转换为C语言代码实现模糊PID控制模型的C语言代码转换,我们可以使用MATLAB Coder。
simulink转化为model reference

simulink转化为model reference Simulink转化为Model Reference:降低复杂性,提高模型可重用性的最佳实践1. 引言(150-200字)在系统建模和仿真领域,Simulink是一款强大的工具,能够帮助工程师们更好地设计和验证复杂系统。
Simulink的一个重要特性是可以将模型分解为多个子系统,这在大型项目和多人合作中非常有用。
在这篇文章中,我们将重点关注如何使用Simulink的Model Reference功能,进一步提高模型的可重用性和降低复杂性。
2. 理解Model Reference(200-300字)Model Reference是Simulink中的一种模块化设计方法,允许用户将模型分解为多个可重用的子模型。
这些子模型被称为模型引用,每一个模型引用都是一个相对独立的实体,可以通过指定输入、输出和参数来定义其功能。
模型引用可以代表物理组件、算法或任何需要重复使用的模块。
3. Model Reference优势(300-400字)使用Model Reference具有以下优势:- 模块化设计:通过将系统拆分为多个模型引用,可以将关注点放在每个子系统上,使得设计更加集中而易于管理。
- 可重用性:模型引用可以在不同的项目中重复使用,从而节省了开发时间和资源。
- 分级仿真:每个模型引用可独立进行仿真测试,然后将其集成到更大的系统中。
- 高效的软件开发:不同的开发人员可以并行地开发和测试各个模型引用,减少了协作过程的复杂性。
- 高度自定义:模型引用可以具有多个变体,以满足不同项目或系统规格要求。
4. Simulink中创建Model Reference(400-600字)创建Model Reference的关键步骤如下:- 步骤一:创建模型引用库。
在Simulink中选择"Model Reference",然后选择"Model Reference Library"。
simulink转换c语言step函数空的
simulink转换c语言step函数空的Simulink是MATLAB环境下的一个重要工具,用于建模、仿真和分析动态系统。
它提供了图形化界面,使用户能够以块图的形式表示系统模型,并通过连接这些块来建立模型的输入和输出关系。
在进行实际的嵌入式系统开发时,通常需要将Simulink模型转换为C语言代码,以便在嵌入式设备上运行。
Simulink提供了一个内置的代码生成器,可以自动将Simulink模型转换为可执行的C代码。
转换的过程可以分为两个步骤:模型编译和模型部署。
在模型编译阶段,Simulink会解析模型,生成代码并进行编译。
这个过程负责将模型中的各个组件转换为C语言函数,并生成与模型结构相对应的C函数调用关系。
模型部署阶段则负责将编译后的代码部署到目标嵌入式设备上,并进行测试和验证。
这个过程通常需要借助第三方工具链,比如GNU工具链。
在进行Simulink模型转换为C语言代码的过程中,一些细节需要注意:1. 模型配置:在进行代码生成之前,需要对Simulink模型进行适当的设置和配置。
比如指定目标硬件平台、选择合适的代码生成工具、配置模型参数等。
2. 代码优化:生成的C代码可能存在一些不必要的冗余部分,需要进行优化。
这包括减小代码体积、提高执行效率等。
Simulink提供了一些优化选项,比如函数嵌套、临时变量优化、循环展开等。
3. 数据类型:Simulink支持多种数据类型,如定点数、浮点数等。
在转换为C代码时,需要选择合适的数据类型,并根据实际需求进行转换和处理。
4.实时性能:对于需要实时运行的系统,需要确保生成的C代码能够满足实时性能要求。
这包括对代码执行时间的约束、使用合适的算法和数据结构,以及进行实时调度和优先级管理等。
总之,Simulink转换为C语言代码的过程需要仔细处理各个环节,确保生成的代码能够正确、高效地运行在目标嵌入式设备上。
这需要有一定的软件开发经验和深入理解Simulink和C语言的知识。
simulink中convert的用法

simulink中convert的用法Simulink 中 Convert 的用法在 Simulink 这个强大的建模与仿真环境中,Convert 这个功能起着至关重要的作用。
它能够帮助我们在不同的数据类型、信号格式和数值表示之间进行转换,从而使得模型的构建和优化更加灵活和高效。
首先,我们来了解一下为什么在 Simulink 中需要进行转换。
在实际的工程应用中,不同的模块可能需要不同的数据类型来保证计算的准确性和效率。
比如,某些控制算法可能需要整数类型的数据来减少计算量,而传感器采集到的数据可能是浮点数类型。
这时候,就需要使用 Convert 来实现数据类型的转换,以确保各个模块之间能够正常地交互和协同工作。
Simulink 中的 Convert 功能可以在多个层面上进行操作。
在信号层面,它可以将输入信号从一种数据类型转换为另一种数据类型。
例如,将一个双精度浮点数信号转换为整数信号。
这在处理模拟信号到数字信号的转换,或者与特定硬件接口进行交互时非常有用。
在模块参数层面,Convert 可以调整模块的输入和输出参数的数据类型。
比如说,一个乘法模块的输入原本是整数,但是为了适应新的计算需求,我们可以通过 Convert 将其转换为浮点数。
接下来,让我们具体看看如何在 Simulink 中使用 Convert 功能。
在Simulink 的库浏览器中,我们可以找到专门用于转换的模块,如 DataType Conversion 模块。
将这个模块添加到模型中后,通过设置其参数,我们可以指定输入和输出的数据类型。
例如,如果我们要将一个输入为双精度浮点数的信号转换为 16 位整数信号,我们可以在 Data Type Conversion 模块的参数设置中选择“Integer”作为输出数据类型,并指定“16-bit signed”作为整数的具体格式。
除了简单的数据类型转换,Convert 还可以处理复杂的数据结构转换。
simulink及模型转换
选取模块、放大或缩小模块、改变模块名字
双击某一模块或在模块上单击鼠标右键,选择Block Parameters可以对参数进行设置,选择Block Properties可以设 置和查看模块的特性。 模块的连线:移动鼠标到某一模块的输出端,鼠标的箭头会变成 十字形光标,按住鼠标左键移动鼠标到另一模块的输入端,当十 字光标出现重影时,释放左键即可。P115
x' = Ax+Bu y = Cx+Du State-Space
Continuous-Time Delays
To
Ti
Transfer Fcn
Zero-Pole Memory Transport Delay
传递函数
simulink模糊pid控制模型转c语言代码 -回复
simulink模糊pid控制模型转c语言代码-回复Simulink模糊PID控制模型转C语言代码是项目中常见的任务之一。
在本文中,我们将详细讨论如何一步一步地完成这个过程。
我们将从模糊PID控制的基本原理开始,并逐渐介绍如何使用Simulink来建立一个模糊PID控制模型。
接下来,我们将讨论如何将Simulink模型转换为C语言代码,并最终将其应用于实际场景中。
首先,让我们了解一下模糊PID控制的基本原理。
PID控制是一种常用的自动控制方法,可以通过对误差、积分和微分进行加权求和来产生控制输出。
模糊PID控制是PID控制的一种扩展,它使用模糊逻辑来动态调整PID参数,以适应不同的工况和控制要求。
模糊逻辑使用模糊集和模糊规则进行决策,这使得模糊PID控制在复杂、非线性系统中具有良好的控制性能。
接下来,我们将使用Simulink建立一个模糊PID控制模型。
Simulink 是一种功能强大的工具,可以用于建立和模拟多种控制系统。
首先,我们需要定义输入和输出变量,并选择适当的模糊控制器类型。
对于简单的应用,我们可以选择一个基于规则的模糊控制器,例如模糊PID控制器。
然后,我们需要定义模糊集和模糊规则,以及它们之间的关系。
这可以通过Simulink的图形界面进行设置。
完成模糊PID控制模型的建立后,我们可以开始将模型转换为C语言代码。
首先,我们需要将Simulink模型导出为MATLAB函数。
这可以通过在Simulink中选择"File"->"Generate Code"来实现。
然后,我们可以使用MATLAB的"codegen"函数将MATLAB函数编译为C语言代码。
编译成功后,我们将得到一个包含C语言代码的文件夹。
接下来,我们需要将C语言代码集成到实际的控制系统中。
首先,我们需要创建一个C语言项目,并将之前生成的C语言代码添加到项目中。
simulink转c语言代码 -回复
simulink转c语言代码-回复Simulink转C语言代码是一种将Simulink模型中的设计转化为C语言代码的方法。
Simulink是一种在MATLAB环境中使用的图形化编程工具,它可以用于设计、建模和仿真各种动态系统。
C语言是一种经典的编程语言,广泛应用于嵌入式系统开发和高性能计算等领域。
Simulink模型转换为C语言代码的过程可以分为以下几个步骤:1. 创建Simulink模型:首先,我们需要创建一个Simulink模型,并在模型中定义系统的输入、输出、状态和运算等。
在Simulink中,这可以通过在图形界面中拖拽和连接不同的模块来实现。
2. 选择代码生成选项:在Simulink中,有许多代码生成选项可以选择。
我们可以在"模型配置参数"对话框中设置代码生成选项,例如选择C 语言代码生成器、选择目标硬件平台等。
根据目标环境的不同,我们还可以选择生成可独立执行的代码、生成代码库等。
3. 生成代码:一旦我们完成了模型的设置和配置,就可以开始生成C 语言代码了。
在生成代码之前,Simulink会对模型进行验证和优化,以确保生成的代码的正确性和效率。
生成的代码可以在指定的文件夹中找到,并且代码的文件名和文件结构可以根据我们的需求进行自定义。
4. 优化代码:生成的C语言代码可能需要进一步进行优化,以提高代码的性能和可读性。
这可以通过手动修改生成的代码或使用一些优化工具来实现。
例如,我们可以使用代码压缩工具来减小代码的体积,或者使用代码优化工具来提高代码的执行效率。
5. 编译和运行代码:一旦我们完成了代码的优化,就可以将C语言代码编译为可执行文件,并在目标硬件平台上进行测试和调试。
在编译期间,我们可能需要提供一些额外的编译选项和库文件,以确保代码能够正确地运行。
总结来说,Simulink转C语言代码是一个相对简单但关键的过程,可以帮助我们将Simulink模型转化为真实的嵌入式系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s=0;
a=[12,13,14;15,16,17;18 ,19,20;21,22,23];
for k=a s=s+k; s
end disp(s');%输出行向量
a
1
a
2
Simulink在系统仿真中的应用
Simulink是一种用于在MATLAB下建立模块化的集成软件工具包。
前面涉及到的仿真都是较为简单的静态仿真,为了处理更复 杂的和时间有关的动态系统,就必须学习simulink的使用。 Simulink是matlab提供的实现系统建模和仿真的一个软件包。它 让用户把精力从编程转向模型的构造。
通常用颜色来区分程序内容的类别: 绿色:注释部分程序不执行 黑色:程序主题部分 红色:属性值的设定 蓝色:控制流程,比for,if…then等语句
t=0:0.1:7; x=sin(t); plot(t,x,'k'); title('正弦曲线'); xlabel('x轴'); ylabel('y轴');
a
6
2 SIMULINK的基本模块
在SIMULINK中包含:
连续系统模块库(Continuous)、
离散系统模块库(Discrete)、
数学运算模块库(Math)、
非线性模块库(Nonlinear)、
信号与系统模块库(Signal&System)、
接收(输出)模块库(Sinks)、
输入源模块库(Sources)等。
10
接收模块sink功能:
模块名
功能简介
Scope XY Graph Display To File To Workspace Stop Simulation
示波器 两个信号的关系图,用MATLAB图形显示
实时数值显示 保存到文件 输出到当前工作空间的变量 输入为非零时停止仿真
a
11
• 用示波器模块来观察输出
每一个模块又包含很多子模块。
a
7
连续系统模块Continuous功能: Continuous-Time Linear Systems
模块名
功能简介
1 s
Integrator
du/dt De ri va ti ve
Integrator Derivative State-Space Transfer Fcn
Dead Zone
死区特性
Relay
限制输出值在某一范围内变化
Switch
根据临界值自动判断选择所接受的输入端
Manual Switch
人工判断选择所接受的输入端
Mutiport Switch
在多输入中选一个输出
Coulumb & Viscous Friction 当输出值达到一定值时,输出才le
离散零-极点模型
First-Order Hold
一阶保持器
a
9
非线性模块库
Rate Limiter
限制输入变化率的变化大小
Saturation
让输出超过某一值时能够饱和
Quantizer Backlash
把输入转化成阶梯状的量化输出 由deadband设定, 输出依据输入的改变而改变
Va ri a b l e
Time DelayTransport Delay
Zero-Pole
零-极点模型
Memory
把前一步的输入作为输出
Transport Delay
把输入信号按给定的时间做延迟
Variable Transport Delay 按第二个输入指定的时间把第一
个输入做延迟
a
8
离散系统模块Discrete功能:
模块名
功能简介
Zero-Order Hold
零阶保持器
Unite Delay
采样保持,延迟一个周期
Discrete-Time Integrator 离散时间积分
Discrete State-Space
离散状态方程
Discrete Filter
离散滤波器(IIR、FIR)
Discrete Transfer Fcn 离散传递函数
– Sinks库 •Scope 示波器窗口
•X Y graph 绘制二维的图形
•Display 将数据以数字的形式显示出来
• 使用Workspace模块 – 将信号输入至Workspace模块,该模块将数 据输出到Matlab的命令窗口中,以‘simout’ 变量名保存下来,也可以改变变量名用另外 的名字保存
– 时间数据用sources中的clock模块 • 使用返回值将输出返回Matlab命令窗口中
– out1
a
12
输入源模块source功能:
模块名
功能简介
Constant
常数
Signal Generator 信号发生器
Step
阶跃信号
Ramp
线性增加或减少的信号
Sine Wave
正弦波
Repeating Sequence 重复的线性信号,类似锯齿形
积分环节 微分环节 状态方程 传递函数
x' = Ax+Bu y = Cx+Du
State-Space
1 s+1 Transfer Fcn
(s-1) s(s+1) Ze ro -Po l e
Continuous-Time Delays
T ransport De l a y
To
Ti
Va ri a b l e
Simulink建模的基础知识
Simulink含两层含义:“Simu”表示仿真(simulation);而link表示 它能够进行系统连接,即:把一系列模块连接起来,构成复杂的系 统模型。正是由于它的这些功能和特色,使得它成为计算机仿真领 域首选的仿真环境。
a
3
启动simulink, 只需要在 matlab命 令窗口输入:
>>simulink 或者单击命 令窗口里 工具栏上 的按钮。
Simulink库浏览器
a
4
模型窗口
Simulink最让人振奋的一点就是支持图形用户界面。
a
5
SIMULINK的基本操作
1、SIMULINK窗口:库浏览器、 SIMULINK模型窗口 2、 SIMULINK模块操作: 模块是建立SIMULINK模型的基本单元,用适当的方式把各种 模块连接在一起就能够建立任何动态系统模型。
选取模块、放大或缩小模块、改变模块名字
双击某一模块或在模块上单击鼠标右键,选择Block Parameters 可以对参数进行设置,选择Block Properties可以设置和查看模 块的特性。
模块的连线:移动鼠标到某一模块的输出端,鼠标的箭头会变成 十字形光标,按住鼠标左键移动鼠标到另一模块的输入端,当十 字光标出现重影时,释放左键即可。P115