中南大学《动车组传动与控制》纸质作业答案(第4章)
机车车辆传动与控制作业参考答案(5-6章)
1 《机车车辆传动与控制》作业参考答案(5-6章)一、名词解释:1.Band-Band 控制:即滞环控制,用滞环比较器实现。
控制:即滞环控制,用滞环比较器实现。
2.PI 调节器:即比例积分调节器。
它克服了积分调节器动态响应慢的缺陷,利用了比例调节器动态响应迅速的特点,将比例调节器和积分调节器结合起来,使得输出静态准确,动态响应迅速。
3.PWM 控制:控制:PWM PWM PWM((Pulse Width Modulation)控制就是对脉冲的宽度进行调制的技术。
即通过对一系列脉冲的宽度进行调制,来等效地获得所需要的波形(含形状和幅值)。
二、简答题:1.1.分析矢量控制的基本思想。
分析矢量控制的基本思想。
分析矢量控制的基本思想。
答:将三相异步电动机经3/2变换、变换、2s/2r 2s/2r 变换,变换到以转子磁场定向的M 、T 同步坐标系,并使M 轴定向在转子磁链ψ2方向,就可实现励磁电流i M 和电流i T 的独立控制,使非线性耦合系统解耦,将其等效成直流电动机模型。
然后仿照直流电动机的控制方法,求得直流电动机的控制量,再经过相应的反变换,既可以控制异步电动机。
这就是矢量定向控制的基本思想。
2.2.分析转子磁链的电压模型的基本工作原理及优缺点。
分析转子磁链的电压模型的基本工作原理及优缺点。
分析转子磁链的电压模型的基本工作原理及优缺点。
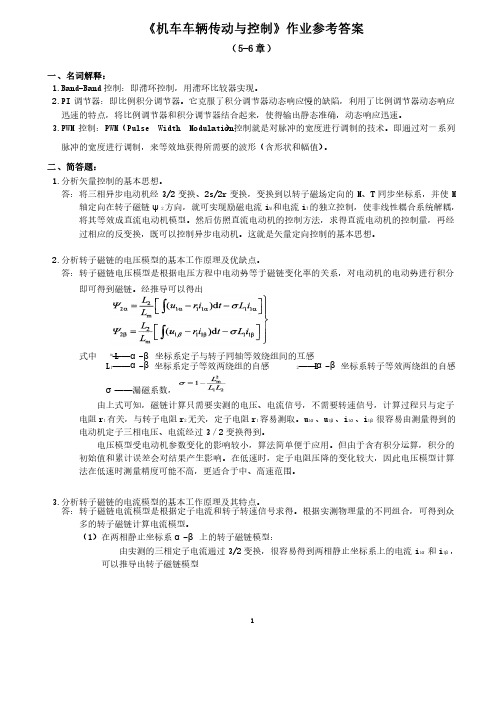
答:转子磁链电压模型是根据电压方程中电动势等于磁链变化率的关系,对电动机的电动势进行积分即可得到磁链。
经推导可以得出即可得到磁链。
经推导可以得出式中式中 L L m ——α-β坐标系定子与转子同轴等效绕组间的互感坐标系定子与转子同轴等效绕组间的互感L 1——α-β坐标系定子等效两绕组的自感坐标系定子等效两绕组的自感 L L 2——α-β坐标系转子等效两绕组的自感坐标系转子等效两绕组的自感σ——漏磁系数,由上式可知,磁链计算只需要实测的电压、电流信号,不需要转速信号,计算过程只与定子电阻r 1有关,与转子电阻r 2无关,定子电阻r 1容易测取。
中南大学现代远程教育课程考试(专科)复习题及参考答案

二、简答题1、什么是绝对压力和表压力?它们有什么样的关系?2、我国对制动管的最小及最大减压量是如何规定的?3、试述SS4攺型电力机车闸瓦间隙调整器的作用原理。
4、电空制动屏柜上主要安装了哪些部件?5、重联阀与哪些管道相联接?6、104型空气制动机主要由哪些部件组成?7、盘形制动与闸瓦制动相比,它有哪些优点和不足之处?8、产生列车制动纵向动力作用的主要原因有哪些?9、叙述辅助空气压缩机的作用和使用时机。
10、说明基础制动装置的用途。
11、均衡风缸的设置目的是什么?12、分配阀与哪些管道连接?13、机车无动力回送时,应对制动机做哪些处理?三、问答题1、试画出SS4改型电力机车的风源系统。
2、试述109型机车分配阀的基本作用原理。
3、电空位转空气位时,应做哪些工作?其注意事项有哪些?4、紧急制动后15s内,为什么不能进行缓解操纵?如何调整该时间参数?5、DK—1型电空制动机的特点、组成、控制关系分别是什么?6、试述SS4改进型电力机车闸瓦间隙调整器的作用原理。
7、试述空气干燥器的工作原理。
电力机车制动机复习题参考答案一、填空1、直通式空气制动机自动空气制动机2、物体间的相互作用力单位面积上所受力的大小3、压力空气的实际压力压力表指示的压力值4、140kPa170kPa5、当列车管减压速率达到一定数值范围时10~40 kPa /s70 kPa /s6、风源系统制动机气路系统控制气路系统辅助气路系统7、YWK—5—C型总风缸压力(750~900 kPa)8、干燥剂水分双塔式单塔式9、压力空气逆流单向流动性能无压差止回阀压差止回阀10、出风口至止回阀之间最大工作压力11、TFK1B型闭式电空阀放风管大气得电12、机车制动机基础制动装置手制动机13、将制动原力放大的倍数14、电信号压力空气15、电气线路空气管路16、总风缸管列车管过充风缸管总风遮断阀管17、均衡风缸的压力变化18、容积室作用管滑阀式空气阀19、容积室和作用管制动缸20、小闸制动、缓解与保压全列车21、电空转换阀作用柱塞阀定位柱塞22、电空位空气位正常运行——故障运行23、紧急电空阀94YV 列车管24、运转中立制动紧急位重联位25、本机位补机位26、控制DK—1型电空制动机27、803 805 813 83628、803 809 813 83629、807 806 81330、806 808 81331、82132、806 804 812 82133、缓解制动34、制动缓解35、膜板活塞36、二压力机构37、三压力38、制动距离39、单面盘双面盘40、严重相对滑动二、简答题1、什么是绝对压力和表压力?它们有什么样的关系?答:绝对压力是指压力空气的实际压力。
《动车组传动与控制》作业参考答案

《动车组传动与控制》作业参考答案作业一(1-3章)一、名词解释:1.动力分散牵引方式:以日本为代表,将全列车分为若干个动力单元,在每一个动力单元中带牵引电机的驱动轴(动力轴)分散布置在单元的每一个或部分车轴上,将传动系统的各个动力设备也分散地设置在各个车辆底下,不占用任何一辆车厢。
2.动力集中牵引方式:以欧洲为代表,动力集中型高速列车是将动力设备全部设置在一辆头车中,全列车的牵引力由集中在动力头车的动力轮对上的电动机提供。
3.恒功率调速比:恒功率调速比定义:c PM n v v k =式中:PM v 为恒功率区的最高速度;c v 为持续速度。
4.变压器的额定容量:在铭牌规定的额定状态下变压器输出视在功率的保证值,称为变压器的额定容量SN 。
额定容量用伏安(V·A)或千伏安(kV·A)表示。
由于变压器的效率很高,通常一、二次侧的额定容量设计成相等。
对三相变压器,额定容量系指三相容量之和。
5.变压器的额定电压:正常运行时,规定加在一次侧的端电压称为变压器一次侧的额定电压U1N 。
二次侧的额定电压U2N 是指变压器一次侧加额定电压时二次侧的空载电压。
额定电压以V 或kV 表示。
对三相变压器,额定电压是指线电压。
6.变压器的额定电流:根据额定容量和额定电压算出的电流称为额定电流,以安表示。
对三相变压器,额定电流指线电流。
对于单相变压器,一次和二次额定电流分别为:NN N N N N U S I U S I 2211,== 对于三相变压器,一次和二次额定电流分别为:NN N N N N U S I U S I 22113,3== (1)转差率:旋转磁场的转速n 1与转子转速n 的差值称为转差,用△n 表示。
转差△n 与同步转速n 1的比值称为转差率,用s 表示,即:11n n n S -=(2)异步电动机的机械特性: 异步电动机的机械特性是指转差率与电磁转矩之间的关系T em =f(s)。
机电传动控制_各章课后习题及答案大全
机电传动控制_各章课后习题及答案⼤全机电传动控制邓星钟第四版课后答案第⼆章机电传动系统的动⼒学基础2.1 说明机电传动系统运动⽅程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是有电动机产⽣⽤来克服负载转矩,以带动⽣产机械运动的。
静态转矩就是由⽣产机械产⽣的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动⽅程式怎样看出系统是处于加速,减速,稳态的和静态的⼯作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的⼯作状态。
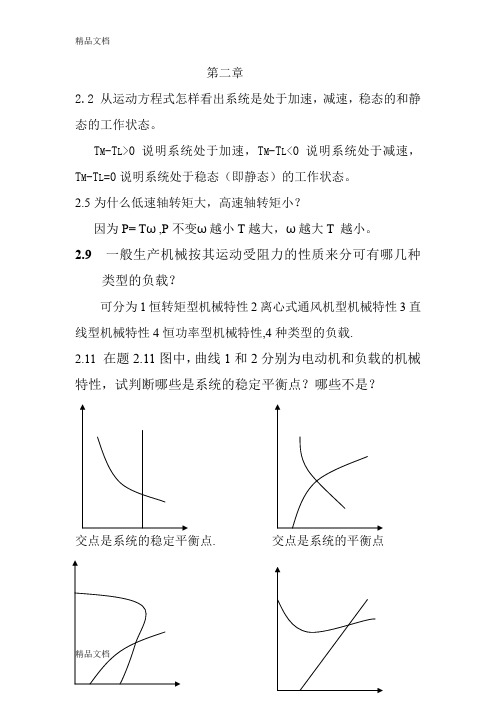
2.3 试列出以下⼏种情况下(见题2.3图)系统的运动⽅程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头⽅向表⽰转矩的实际作⽤⽅向)TM TL TM TLNTM=TL TM< TLTM-TL>0说明系统处于加速。
TM-TL<0 说明系统处于减速TM TL TM TLTM> TL TM> TL系统的运动状态是减速系统的运动状态是加速TM TL TM TLTM= TL TM= TL系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多⽣产机械要求低转速运⾏,⽽电动机⼀般具有较⾼的额定转速。
这样,电动机与⽣产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,⽪带等减速装置。
所以为了列出系统运动⽅程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到⼀根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩⼤,⾼速轴转矩⼩?因为P= Tω,P不变ω越⼩T越⼤,ω越⼤T 越⼩。
2.6为什么机电传动系统中低速轴的GD2逼⾼速轴的GD2⼤得多?因为P=Tω,T=G?D2/375. P=ωG?D2/375. ,P不变转速越⼩GD2越⼤,转速越⼤GD2越⼩。
中南大学《机电传动控制》课程作业(在线作业)二及参考答案
(一) 单选题1. 多速异步电动机启动时,()。
(A)先接成高速,然后再换接成低速(B) 先接成低速,然后再换接成高速参考答案:(B)2. 一台三相异步电动机在额定负载下运行时,若电源电压突然下降,则转子转速会()。
(A)不变(B) 上升(C) 下降参考答案:(C)3. 三相异步电动机的降压启动,目的是()。
(A)降低启动电流(B)增大启动转矩(C)加快启动过程参考答案:(A)4. 三相异步电动机的降压启动,启动电流会()。
(A)降低(B) 不变(C) 增加参考答案:(A)5. 两个相同的110V交流接触器线圈能否串联接于220V的交流电源上运行()。
(A)能(B) 不能参考答案:(B)6. 电动机的短路保护、长期过载保护、过电流保护,三者动作电流按从小到大排序为()。
(A)电动机的短路保护、长期过载保护、过电流保护(B) 长期过载保护、电动机的短路保护、过电流保护(C) 长期过载保护、过电流保护、电动机的短路保护(D) 过电流保护、长期过载保护、电动机的短路保护参考答案:(C)7. 三相异步电动机断了一根电源线后,能否启动()。
(A)能(B) 不能参考答案:(B)8.一台六极三相异步电动机,电源电压频率为,满载时转差率为0.02,则电动机的同步转速为()。
(A)(B)(C)(D)参考答案:(C)9. 一台三相异步电动机在额定负载下运行时,若电源电压突然下降,则转矩会()。
(A)不变(B) 上升(C) 下降参考答案:(A)10. 两个相同的110V直流接触器线圈能否串联接于220V的直流电源上运行()。
(A)能(B) 不能参考答案:(A)11.三相异步电动机改变极对数调速,定子绕组由改成YY,调速性质属于()。
(A)恒转矩(B) 恒功率参考答案:(B)12. 设计控制电路时,是否可以忽略触点合上或断开的瞬间动作延时()。
(A)可以(B) 不可以参考答案:(B)13. 三相异步电动机,利用控制电压电源电压频率为50HZ,满载时转差率为0.02,则定子旋转磁场相对于转子的转速为()。
兰交大轨道车辆构造与设计习题及答案第4章 车体结构与设备布置
第四章车体结构与设备布置1、简述车体的类型及组成车体组成:车体是指转向架之上的车厢部分(也称上部结构)。
它由司机室、车顶、侧壁、间壁、车架和排障器等部分组成。
(1)按用途可分工业电力机车和干线运输大功率电力机车(2)按承载方式分:(a)底架承载式车体(平车)(b)侧壁和底架共同承载式车体(敞车)(c)整体承载车体。
(客车,罐车,棚车)2、简述车体轻量化、防火、密封和隔声降噪的措施。
实现结构轻量化的主要途径有两个:(1)采用新材料,(2)合理优化结构设计。
轨道车辆防火措施(1)结构抗火:除按常温条件核算车体的强度和刚度外,还要按350C的条件核算强度和刚度,这样才能够保证在失火初期各结构不变形,为旅客的疏散提供保证。
⑵隔断火源:车上使用的电气拒要用金属制作,远离热源和油箱;电缆中间要没有分线接头.并保留10%的备用线,经过热源处要加防护套。
(3)防止火灾蔓延:车辆间壁板中间要加0.5mm金属板;动车机房和客室间要设防火门:电缆穿过隔墙处要加设热涨管;通风管道和暖气管罩内壁.要用金属制作。
(4)车门设计应有利于乘客的疏散:外端门应设计成手动、风动的横向拉门,侧门为自动外塞门。
车上其它各种门在发生火灾时都能手动打开,车门和车窗上的玻璃要设计成活动的。
(5)车辆难燃化:车辆难燃化是列车防火、灭火及旅客能否来得及琉散的关键,在设计车辆时.不同部位应采用不同等级的防火材料来提高列车的防火性能。
(6)车内应设有灭火相辅助照明设备I辅助照明灯由蓄电池供电,在列车停运时能供给辅助照灯工作1一2小时。
机器间要装有温度传感器式的火情遥控探测装置,能随时反映工作间的温度情况。
每节车厢要没有有线电话或无线电话,当发生情况时能及时与司机通话。
⑺加强车内的巡回检查,引导旅客安全疏散:做到火灾早期发现,早期扑救.引导旅客安全疏散。
当列车在隧道内发生火灾时,首先将着火车厢的旅客疏散到相邻车厢避难,再关闭车门、车窗等,列车可以连挂着着火车厢继续运行,拖出隧道灭火。
《电机与控制》作业四(含习题解答).doc
《电机与控制》作业四(含习题解答)1为什么改变异步电动机定了供电频率,可以调节异步电动机的转速?ill ni=60/!/p可知,当极对数p不变时,同步转速珥和电源频率£成正比。
而异步电动机的转速n= (1-S)n1=(1-S)60/\/p,所以连续地改变供电电源频率,就可以平滑地调节电动机的转速。
2异步电动机变频调速时,如果只从调速角度出发,仅改变是否可行?为什么?在实际应用中,同时还要调节否则会出现什么问题?由电机学可知,异步电动机有如下关系式:l/严耳=4.44办心①,”式中,定子绕组匝数N],定子绕组系数为常数。
在电源频率人一定时,定子绕组感应电动势呂与产生它的气隙合成磁通①”,成正比。
忽略定子阻抗压降时,定子电压(A与呂近似相等。
由式(4-1)看出,若S不变,办与①”成反比。
如果久下降,则①巾增加,使磁路过饱和,励磁电流迅速上升,铁损增加,电动机效率降低,也使功率因数减小。
如果办上升,则①巾减小,电磁转矩减小,电动机的过载能力下降。
可见调速时为维持恒磁通① 不变,在调节人的同时还要协调地调节才可以使异步电动机具有较好的性能。
3异步电动机变频调速时,常用的控制方式有哪几种?它们的基本思想是什么?这几种控制方式得到的机械特性如何?常用的控制方式有三种:(1)保持Ujf,=常数的控制方式一般生产机械的负载多为恒转矩负载。
对恒转矩负载,希望在调速过程中保持最大转矩Rax不变,即电动机的过载能力不变。
由电机学可知,最大转矩几琢为T _ 3严maX 4 吋1 [r t + +(“ +花)2]若忽略定子电阻『1,并考虑到小+*2 =X K =2硏(厶+厶2),则T max ocC^/Zi)2- 所以在从额定频率(称为基频)向下调节久时,协调控制使久与6的比值保持不变, 即可保证在调速过程中,电动机的最大转矩不变。
称为压频比恒定的控制方式。
在频率较高时,定子电阻耳相对于短路电抗g来说,可以忽略(因为x K */;),瀰节办同时,调节匕,并保持Ujf x =常数,即可使不变。
机车车辆传动与控制作业参考答案(3-4章)

一、名词解释:1. 转差率旋转磁场的转速n1与转子转速n 的差值称为转差,用△n 表示。
转差△n 与同步转速n1的比值称为转差率,用s 表示,即:()%100n n -n S 11⨯=转差率是表征感应电动机运行状态的一个重要参量。
一般情况下,异步电动机的转差率变化不大,空载时约为0.5%,额定负载时约为5%,异步牵引电动机的转差率一般小2%。
2. 转差频率 转差频率就是转差对应的频率,即⎥⎥⎥⎦⎤====12121111sf f f f f f -f n n -n s3. 电流型牵引变流器 交-直-交流传动系统中,牵引变流器由网侧整流器、直流中间环节、电动机侧逆变器及控制装置组成。
整流器的作用是把来自接触网的单相交流电压变换为直流。
直流中间环节由滤波电容器或电感组成,其作用是储能和滤波,获得平直的直流电。
逆变器的作用是将中间环节平直的直流电,通过一定的控制策略,变换为频率、电压可调的三相脉冲交流电,供给交流牵引电动机,通过能量转换驱动列车。
根据中间直流环节滤波元件的不同,牵引变流器可分为电压型和电流型两种。
电流型牵引变流器直流中间环节的储能器采用电感,相当于恒流源,向逆变器输出的是恒定的直流电流。
4. 电压型牵引变流器交-直-交流传动系统中,牵引变流器由网侧整流器、直流中间环节、电动机侧逆变器及控制装置组成。
整流器的作用是把来自接触网的单相交流电压变换为直流。
直流中间环节由滤波电容器或电感组成,其作用是储能和滤波,获得平直的直流电。
逆变器的作用是将中间环节平直的直流电,通过一定的控制策略,变换为频率、电压可调的三相脉冲交流电,供给交流牵引电动机,通过能量转换驱动列车。
根据中间直流环节滤波元件的不同,牵引变流器可分为电压型和电流型两种。
电压型变流器直流中间环节的储能器采用电容器,向逆变器输出的是恒定的直流电压,相当于电压源。
5. 两电平式逆变器逆变器将直流转换为交流。
两电平式逆变器,把直流中间环节的正极电位或负极电位接到电动机上,即逆变器的输出相电压为两种电平。
《机车车辆传动与控制》作业参考答案

《机车车辆传动与控制》作业参考答案(0-2章)一、名词解释:1.加馈电阻制动:为了改善电阻制动在低速时的制动特性,须维持制动电流不随机车速度降低而下降。
要维持制动电流不变,必须要有外部电源对制动回路补充供电,以使制动电流(电枢电流)不变,实现低速恒制动力特性,这种方法称为“加馈电阻制动”。
在电力机车电阻制动中,加馈电源由主变压器和主整流桥相控输出整流电压U d 提供,对制动回路实施电流加馈,以维持制动电流不变,即达到恒制动力特性。
Za d Z R E U I +=,要维持制动电流不变,加馈电压必须要与发电机感应电势同步反向变化,即发电机输出电压减小多少就由U d 补偿多少,直至加馈整流桥输出电压达到最大值为止,加馈制动功率达到最大值,加馈制动过程结束。
此后,电力机车将按照最大励磁电流特性进行制动。
2.电阻制动:电阻制动属动力制动,是利用电机的可逆原理,将牵引电动机改为他励发动机运行,将列车的惯性能量转化为电能的一种非摩擦制动方式,在动力轴上产生与列车运行方向相反的阻力性转矩,阻碍列车运行,对列车实施制动。
电阻制动将发电机输出的电能消耗在制动电阻上,以热能的形式散失掉。
3.牵引特性:机车牵引特性是指机车轮周牵引力F 与机车速度v 之间的关系,即F=f(v),它是表征机车性能的重要指标,是列车运行牵引计算的依据。
4.(相控电力机车)特性控制:特性控制是目前广泛用于国产机车上的一种控制方式。
它是恒流控制和准恒速控制的结合,即机车牵引特性具有恒流启动和准恒速运行的双重性能。
二、简答题:1.简述列车电力传动系统的基本组成及其功能。
答:列车电力传动系统一般由能源供给单元、变换单元、动力输出单元和控制单元等部分组成。
列车电力传动系统的基本组成如下图所示。
能源供给单元:系统提供适当的工作能源,一般有一次能源石油和二次能源电能。
一次能源主要为柴油,二次能源电能通过接触网线提供;变换单元是将工作能源通过相应的装备变换成动力输出单元(负载)所需要的电能,提供给动力输出单元。
《动车组传动与控制》纸质作业答案(第4章)
《动车组传动与控制》作业参考答案一、名词解释:1.标量控制:只对变量的幅值进行控制。
2.矢量控制:对变量的幅值和相位都进行控制。
3.(异步牵引电动机)恒磁通调速:根据交流电动机定子绕组感应电势公式当电源电压一定时,如果降低频率,则主磁通要增大,基频(额定频率)以下主磁通增加势必使主磁路过饱和,励磁电流增加,铁心损耗也相应增加,这是不允许的。
为此调频时一定要调节电势,保持感应电势与频率的比值不变,即可保持主磁通不变。
4.(异步牵引电动机)恒功率调速:在恒磁通控制中,随着频率和转速的上升,电压U1也相应提高,牵引电动机的输出功率增大,但电压的提高受到电动机功率或逆变器最大电压的限制。
通常调节频率大于基准频率f1>f1N时,即当电压提高到一定数值后维持不变或将不再正比于f1上升,此后电动机磁通开始减小,将进入恒功率控制方式。
由于由此可见,电动机按恒功率运行,电压与频率的调节可采用两种不同的方式,即U1=C,s=C 的调节方式和f2=C,U12/f 1=C的调节方式。
二、简答题:1.简述异步电动机变压变频调速控制发展的三个阶段。
答:异步电动机变压变频调速控制发展的三个阶段如下:(1)普通功能型U f控制方式的通用变频器。
其转速开环控制,不具有转矩控制功能。
(2)高功能型的转差频率控制。
其转速需要闭环检测,具有转矩控制功能,能使电机在恒磁通或恒功率下运行,能充分发挥电机的运行效率,其输出静态特性较U f控制方式有较大改进。
(3)高性能矢量控制或直接力矩控制。
可以实现直流电动机的控制特性,具有较高的动态性能。
前两种方法都是基于异步电动机稳态数学模型建立的。
而矢量控制是基于异步电动机动态数学模型的基础上建立的。
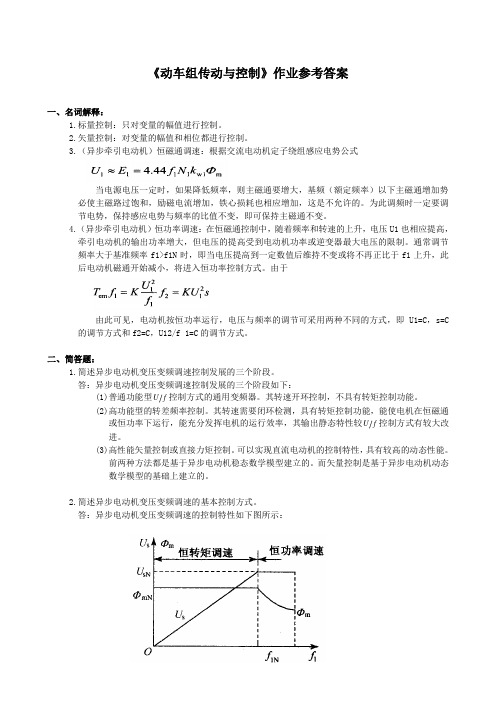
2.简述异步电动机变压变频调速的基本控制方式。
答:异步电动机变压变频调速的控制特性如下图所示:(1)基频以下调速:保持m Φ不变,使:/1E f C g =,即采用恒值电动势频率比的控制方式。
但绕组中的感应电动势是难以直接控制的,当电动势值较高时,可以忽略定子绕组的漏磁阻抗压降,而认为定子相电压U s ≈E g ,则得:/1U f C S =。
中南大学《机电传动控制》在线作业答案

B.第二象限
C.第三象限
D.第四象限
得分:0
知识点:在线作业一
展开解析
2.
(4分)他励直流电动机的几种调速方法中,机械特性硬度变软的是()。
A.串电阻调速
B.调压调速
C.调磁调速
得分:0
知识点:在线作业一
展开解析
3.
(4分)他励直流电动机的调速方法有()。
A.串电阻调速
B.调压调速
C.串级调速
得分:0
知识点:在线作业一
展开解析
9.
(2分)他励直流电动机停车时,应先给定子励磁绕组断电,后断电枢电源。
得分:0
知识点:在线作业一
展开解析
10.
(2分)直流发电机的电压平衡方程为。
得分:0
知识点:在线作业一
展开解析
考试成绩
0分
用时: 0分3秒
正确错误不判断
试题导航展开
机电传动控制_在线作业二_试卷
得分:0
知识点:在线作业二
展开解析
2.
(4分)三相异步电动机的调速方法有()。
A.调压调速
B.转子电路串电阻调速
C.改变极对数调速
D.变频调速
得分:0
知识点:在线作业二
展开解析
3.
(4分)相对于三相异步电动机的固有机械特性,硬度变软的是()。
A.降低电动机电源电压的人为机械特性
B.转子电路串电阻的人为机械特性
C.继电器触头多,控制方便
得分:0
知识点:在线作业二
展开解析
10.
(4分)一台三相异步电动机在额定负载下运行时,若电源电压突然下降,则转子转速会()。
A.不变
动车组技术第四次作业
《动车组技术》第四次作业班级:交通设备0902班学号:姓名:第一题:简述动车组控制系统的组成及各部分的主要功能?列车运行控制系统(automatic train control,简称ATC)是根据列车在铁路线路上运行的客观条件和实际情况,对列车运行速度及制动方式等状态进行监督、控制和调整的技术装备。
简称列控系统。
也叫列车自动控制系统。
列车运行控制系统列车自动防护系统(简称ATP),列车自动运行系统(简称ATO),列车自动监控系统(简称ATS)三个部分组成。
列车自动防护系统(Automatic Train Protection,简称ATP):ATP 子系统的主要功能是通过车载ATP系统和地面设备间的信息传输,来实现列车的安全间隔控制、超速防护及车门控制,保证行车安全。
列车自动运行系统(Automatic Train Operation,简称ATO):ATO子系统主要完成站间自动运行、列车速度调节和进站定点停车,并能接受控制中心的运行调度命令,实现列车的运行自动调整。
列车自动监控系统(Automatic Train Supervision,简称ATS):ATS 子系统的主要功能是监控列车运行状态,采用软件方法实现联网、通信及列车运行管理自动化。
第二题:对比分析ETCS和CTCS各应用等级的主要工作原理及异同?ETCS(European Train Control System)系统是为克服欧洲各国信号制式互不兼容,保证高速列车在欧洲铁路网内互通运行,而联合制订的一种列车运行控制系统技术规范。
为实现高速列车在欧洲境内穿越国境时互通运营,结合欧洲各国铁路现状,兼顾既有设备及今后列车运行控制系统发展趋势,ETCS技术规范确定了5个应用等级(0、STM、1、2、3)。
ETCS0级:主要是为了保证装配ETCS车载设备的列车,能在没有ETCS地面设备的线路或尚不具备ETCS运营条件的线路上运行。
ETCS车载设备只显示列车速度,并只监督列车最大设计速度和线路最大允许速度。
中南大学高速铁路概论远程教育试题及答案

中南大学现代远程教育课程考试复习题及参考答案高速铁路概论一、单选题1、世界上第一条高速铁路是………………………………………………………(C )A TGV东南线B TGV大西洋线C 东海道新干线D 山阳新干线2、我国第一条准高速铁路在哪两个城市间改建…………………………………(A )A 广州和深圳B 广州和珠海C 武汉和长沙D 北京和上海3、迄今为止铁路上速度最高运营时速为…………………………………(B )A 200km/hB 300 km/hC 350 km/hD 400 km/h4、我国普通铁路的一般干线,竖曲线半径为………………………………(C )A 8000米B 9000米C 10000米D 12000米5、高速铁路线路所用的钢轨类型为………………………………………………(A )A 60千克/米B 50千克/米C 43千克/米D 55千克/米6、在当今世界上时速为多少时称为准高速( B )A 100 –200 km/hB 120-160 km/hC 200-400 km/hD 160-400 km/h7、我国第一台交-直-交流电传动电力机车是…………………………………( D )A 6Y1型B 韶山3型C 东方红3型D AC4000型8、下列制动方式中属于非粘着制动的是……………………………………( D )A 盘形制动B 油压制动C 电阻制动D 磁轨制动9、利用了轨道电缆构成的双向信息传输通道的自动列车速度控制系统是………( A )A LZB B A TC C TVMD ICE10、采用了吸流变压器的的供电方式是…………………………………………( C )A 直接供电方式B AT供电方式C BT供电方式D CC供电方式11、从发展趋势看,什么将成为高速客车体主导材料( A )A 铝合金B 铜板C 铝板D 以上都可12、人们认为在能源消耗、噪声等方面哪种方式更优越( B )A 内燃列车B 磁悬浮C 气悬浮D 电力列车13、一般认为中程磁悬浮运输速度为(B )A 200公里/小时B 300公里/小时C 300公里以上/小时D 400公里/小时14、下列高速铁路中采用部分修建新线,部分旧线改造,旅客列车专用的铁路模式是( B )A 日本新干线模式B 法国TGV模式C 德国ICE模式D 英国APT模式15、目前世界各国最高运行速度在200km/h以上的高速列车,除了( A )高速列车以外,其余均采用电力牵引。
《动车组传动与控制》纸质作业答案(1-3章)

《动车组传动与控制》作业参考答案一、名词解释:1.动力分散牵引方式:以日本为代表,将全列车分为若干个动力单元,在每一个动力单元中带牵引电机的驱动轴(动力轴)分散布置在单元的每一个或部分车轴上,将传动系统的各个动力设备也分散地设置在各个车辆底下,不占用任何一辆车厢。
2.动力集中牵引方式:以欧洲为代表,动力集中型高速列车是将动力设备全部设置在一辆头车中,全列车的牵引力由集中在动力头车的动力轮对上的电动机提供。
3.恒功率调速比:恒功率调速比定义:c PM n v v k =式中:PM v 为恒功率区的最高速度;c v 为持续速度。
4.变压器的额定容量:在铭牌规定的额定状态下变压器输出视在功率的保证值,称为变压器的额定容量S N 。
额定容量用伏安(V·A)或千伏安(kV·A)表示。
由于变压器的效率很高,通常一、二次侧的额定容量设计成相等。
对三相变压器,额定容量系指三相容量之和。
5.变压器的额定电压:正常运行时,规定加在一次侧的端电压称为变压器一次侧的额定电压U 1N 。
二次侧的额定电压U 2N 是指变压器一次侧加额定电压时二次侧的空载电压。
额定电压以V 或kV 表示。
对三相变压器,额定电压是指线电压。
6.变压器的额定电流:根据额定容量和额定电压算出的电流称为额定电流,以安表示。
对三相变压器,额定电流指线电流。
对于单相变压器,一次和二次额定电流分别为:N N N N N N U S I U S I 2211,== 对于三相变压器,一次和二次额定电流分别为:N N N N N N U S I U S I 22113,3==(1)转差率:旋转磁场的转速n 1与转子转速n 的差值称为转差,用△n 表示。
转差△n 与同步转速n 1的比值称为转差率,用s 表示,即:11n nn S -=(2)异步电动机的机械特性: 异步电动机的机械特性是指转差率与电磁转矩之间的关系T em =f(s)。
(3)异步电动机的临界转差率:最大转矩对应的转差率称为临界转差率。
电机与拖动基础答案(第四版)1-5章
提升速
度给定为
绳索的速度
卷筒外圆线速度
卷筒转速
π
π
电动机转速
于是得
直线运动部分飞轮矩
=3
所以折算到电动机轴上系统总飞轮矩
重物吊起及下放时折算到电动机轴上的负载转矩计算。
重物吊起时,负载转矩折算值
η
重物、导轮 8 及吊钩三者转矩折算值为
算值
所以传动机构损耗转矩为 -Δ
上的负载转矩计算。 空钩吊起时负载转矩
21生产机械切削力或重物重力切削速度或升降速度电动机转速n传动效率负载转矩传动损耗电磁转矩刨床3400042975080起重机9800提升141200075下降14电梯提升10950042下降1022生产机械切削力或重物重力切削速度或升降速度电动机转速n传动效率负载转矩传动损耗电磁转矩刨床340004297508017483491748续表生产机械切削力或重物重力切削速度或升降速度电动机转速n传动效率负载转矩传动损耗电磁转矩起重机9800提升14120007514558363914558下降14120006677283639728电梯提升10950042359022082335902下降1095003815744208235744习题解答21如图21所示的某车床电力拖动系统已知切削力工件直径电动机转速减速箱的三级速比各转轴的飞轮矩为指电动机轴各级传动效率都是09求
等于 1.
(2) 为了使直流电机正、负电刷间的感应电动势最大,只考虑励磁磁场时,
ww 式的直流电动机改变转向时,都要加以考虑。
5. 他励直流发电机稳态运行时的基本方程式与功率关系。 6. 直流电机的可
逆原理。
7. 他励直流电动机稳态运行时的基本方程式与功率关系。
8. 他励直流电动机固有机械特性: 表达式、特性曲线及其特点。这是本章重
列车电力传动与控制 课后习题参考答案

第一章1.试述交-直流传动电力机车的主要缺陷及评价标准。
答:交-直流传动电力机车的主要缺陷是功率因数偏低,谐波电流偏大,对电网与广播通信系统产生不利影响。
评价标准:采用功率因数PF和谐波干扰电流作为评价标准2.简述功率因数的概念,提高交-直流传动电力机车功率因数的主要措施。
答:在交流电路中,电压与电流之间的相位差(Φ)的余弦叫做功率因数,用符号cosΦ表示,在数值上,功率因数是有功功率和视在功率的比值,即cosΦ=P/S.提高功率因数的主要措施:(1)选择合适的整流调压电路(2)采用功率因数补偿电路3.试述交-直流传动电力机车的调速方法及相互关系答:交-直流传动电力机车的调速是通过调节直流(脉流)牵引电动机的转速来实现的,直流牵引电动机的调速主要有两种(1)改变电枢电压调速(2)磁场削弱调速相互关系:在交-直流传动电力机车中只有当调压资源用尽后才能开始实施磁场削弱调速4.分析三段不等分半控桥电路的调压过程及输出关系、波形。
答:调压过程:升压调压过程第一段:普通半控桥(大桥)首先工作,VT1、VT2触发导通,调节α1进行移相控制,直至其全开放,输出电压由零均匀地调至额定输出电压的一半。
此阶段中抽式半控桥(小桥1、2)始终被封锁,α2=α3=π,由VD3、VD4提供续流通路。
第二段:保持普通半控桥VT1、VT2的全导通状态,α1=0,中抽式半控桥中小桥1投入工作,小桥2仍然被封锁,触发VT3、VT4使其导通,调节α2进行移相控制,输出电压在1/2U d基础上递增。
当VT3、VT4全开放时,α2=0,输出电压达到额定输出电压的3/4第三段:保持普通半控桥、小桥1处于全开放状态,小桥2投入工作,触发VT5、VT6导通,调节α3进行移相控制,输出电压将在3/4基础上递增。
当VT5、VT6全开放时,输出电压达到额定值。
至此,升高电压的调节过程全部结束。
降压顺序控制过程与上述升压控制过程相反。
输出关系:第一段大桥:0≤α1<π,α2=α3=πU d=U d1=1/4U d0(1+cosα1) 0≤U d≤1/2U d0第二段大桥1:0≤α2<π,α1=0,α3=πU d2=1/8U d0(1+cosα2)U d=U d1+U d2=1/8U d0(5+cosα2), 1/2U d0<U d≤3/4U d0第三段大桥2:0≤α3<π,α1=α2=0U d3=1/8U d0(1+cosα3)U d=U d1+U d2+ U d3=1/8U d0(7+cosα3), 3/4U d0<U d≤U d0输出波形:5.试述交-直流传动电力机车主电路的选择原则原则:1.若需要进行再生制动,整流电路必须采用全控桥式;若需要电阻制动,可选用半控桥式;2.客用机车采用无级磁削方式,货运机车采用有级磁削方式,一般为3级。
中南大学列车牵引与制动作业参考答案
《列车牵引与制动》纸质作业参考答案一、名词解释:1.换算摩擦系数:不随闸瓦压力改变的假定的闸瓦摩擦系数。
2.黏着系数:黏着力与车轮钢轨间垂直载荷之比。
3.机车牵引性能曲线:表示机车轮周牵引力(纵轴)与运行速度(横轴)相互关系的曲线,通常由试验得到。
4.(制动机的)间接作用:列车管的风压和主活塞的动作直接控制的是作用室风压,然后再通过作用室风压和第二活塞的动作控制机车(车辆)的制动缸。
5.(制动机的)三压力机构:三压力机构的主活塞的动作与否决定于三种压力的平衡与否,工作风缸压力(定压弹簧)、制动管压力,制动缸压力。
二、问答题:1.粘着系数的影响因素有哪些?答:粘着系数的影响因素主要有两个:列车运行速度和车轮和钢轨的表面状况。
轮轨间表面状态包括:干湿情况、脏污程度、是否有锈、是否撒砂以及砂的数量和品质等等。
随着制动过程中列车速度的降低,粘着系数要增大。
2.制动的实质是什么?答:制动的实质可以从能量和作用力两个不同的观点来看。
能量的观点:将列车的动能变成别的能量或转移走。
作用力的观点:制动装置产生与列车运行方向相反的力,是列车尽快减速或停车。
3.简述附加阻力的内容及其意义。
答:列车在线路上运行时受到的额外阻力,如坡道阻力、曲线阻力、隧道阻力等。
附加阻力的种类随列车运行的线路平、纵断面情况而定。
4.简述引起曲线附加阻力的因素。
答:引起曲线附加阻力的因素主要是,机车、车辆在曲线上运行时,轮轨间的纵向和横向滑动、轮缘与钢轨内侧面的摩擦增加,同时由于侧向力的作用,上、下心盘之间以及轴承有关部分摩擦加剧。
由这些原因增加的阻力与曲线半径、列车运行速度、外轨超高、轨距加宽量、机车车辆的固定轴距和轴荷载等诸多因素有关5.简述限制坡度大小对运营的影响。
答:对输送能力的影响:输送能力取决于通过能力和牵引质量。
在机车类型一定时,牵引质量即由限制坡度值决定。
限制坡度大,牵引质量小,输送能力低;限制坡度小,牵引质量大,输送能力高。
动车组传动与控制》复习题

4、对于一个电力拖动系统,稳定运行的充分必要条件是: (√)
5、对于列车牵引系统而言比较典型的有2种匹配方案。最大电机最小逆变器匹配方案和最小电机最大逆变器匹配。(×)
四、简答题
1、交—直—交牵引传动系统的主要组成?
2、CRH1全车共有5个主断路器,3个直接连接主变压器, 2个用于连接没有升弓和没有受电弓的拖车, 工作时,5个主断路器同时关闭。(×)
3、再生制服动时脉冲整流器工作在整流状态,以中间回路支撑电容器输出电压DC3 000V为输入,向牵引变压器侧输出AC1 500V、50Hz电压。(×)
4、CRH5型动车组第一牵引动力单元具有4个牵引/辅助变流器,第二牵引动力单元具有2个牵引/辅助变流器,每台牵引/辅助变流器驱动2台牵引电机。(×)
5、CRH5动车组的牵引电机是一种三相异步、六极、强迫通风型电机,带有定子开启式分层,不带机壳。(√)
四、简答题
1、矢量控制系统有何特点?
答:矢量控制系统有如下特点:
答:(1)把定子电流分解为其励磁分量和转矩分量,得类似于直流电机的动态模型。(2)解耦成独立的转速子系统和转子磁子系统,分别用PI调节器进行边疆控制。(3)如选用高性能的DSP和高精度的光电码盘等速度传感器,系统的调速范围可达1∶1 000。(4)可获得很好的动态性能、调节范围宽。
答:交—直—交牵引传动系统主要由受电弓(包括高压电器设备)、牵引变压器、四象限变流器、中间环节、牵引逆变器、牵引电机、齿轮传动系统等组成。
2、高速列车牵引特性有哪些特点?
答:(1)低速区牵引力恒定或随速度升高而略有下降,要与高速列车的黏着特性随速度的变化趋势相适应。(2)牵引力比大功率机车的牵引力明显减少。(3)高速区为恒功率曲线,牵引力随速度升高而呈双曲线关系下降。(4)正常轨面状态下,启动时及低速范围的牵引力低于黏着限制曲线较多。(5)在正线运行时(坡道12‰)不会出现全功率低速持续运行的工况。
(整理)传动控制第四版习题及其答案.
第二章2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
T M-T L>0说明系统处于加速,T M-T L<0 说明系统处于减速,T M-T L=0说明系统处于稳态(即静态)的工作状态。
2.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
2.9 一般生产机械按其运动受阻力的性质来分可有哪几种类型的负载?可分为1恒转矩型机械特性2离心式通风机型机械特性3直线型机械特性4恒功率型机械特性,4种类型的负载.2.11在题2.11图中,曲线1和2分别为电动机和负载的机械特性,试判断哪些是系统的稳定平衡点?哪些不是?交点是系统的稳定平衡点. 交点是系统的平衡点交点是系统的平衡交点不是系统的平衡点交点是系统的平衡点第三章3.7一台他励直流电动机:P N=15KW, U N=220V, I N=63.5A, n=2850r/min,R a =0.25Ω,其空载特性为:N今需在额定电流下得到150V 和220 V的端电压,问其励磁电流分别应为多少?由空载特性其空载特性曲线.当U=150V时I f=0.71A当U=220V时I f=1.08A3.8 一台他励直流电动机的铭牌数据为:P N=5.5KW,U N=110V, I N=62A, n N=1000r/min,试绘出它的固有机械特性曲线。
R a=(0.50~0.75)(1-P N/U N I N)U N/I N=0.6(1-5500/110*62)*110/62=0.206Ωn0=n N U N/(U N-I N R a)=1131r/minTN=9.55*5500/1000=52.525Nm3.9 一台并励直流电动机的技术数据如下:P N=5.5KW,U=110V, I N=61A,额定励磁电流I fn=2A, n N=1500r/min,电N枢电阻R a =0.2Ω,若忽略机械磨损和转子的铜耗,铁损,认为额定运行状态下的电磁转矩近似等于额定输出转矩,试绘出它近似的固有机械特性曲线。
动车组机械师考试四
动车组机械师考试四1、问答题CRH3型类别动车组空调系统有哪几种工作情况?正确答案:主要有空调开、空调关、空调紧急关闭模式、应急通风、稳态整备状态下空调的工作模式、洗车模式、压力波保护模式。
(江南博哥)2、填空题CRH2型动车组车厢间的连接处设有()内风挡。
另外,在内风挡外侧还设有()外风档,起到隔声及防尘的作用。
正确答案:气密式;压缩型3、填空题CRH2型动车组关闭侧拉门之后各车厢侧面的显示灯会熄灭,司机室驾驶台的关门显示灯会()。
正确答案:亮起4、填空题CRH380B动车组是按照铁路总公司统型技术条件要求进行优化设计的CRH3型动车组,它实现了()、操作界面、运用界面、维护界面、制动界面、监测保护六方面的统一。
正确答案:旅客界面5、填空题CRH2型动车组通过站台高度1.1m及以上线路时,限速()运行。
正确答案:70km/h6、问答题叙述CRH系列动车组随车机械师岗位防火职责。
正确答案:⑴出库前,按照作业标准检查确认电气、消防设备状态,做好联检交接。
⑵在运行中按规定巡视、检查车辆电气、火灾自动报警控制器等设备,发现隐患故障及时处置。
⑶发生火灾时,按火灾事故应急预案及时通知司机采取停车措施或使用紧急制动阀停车;在司机指挥下做好有关行车、列车防护和事故救援工作,负责CRH2型动车组集控开关车门操作。
⑷按规定操作动车组设备,指导客运人员正确使用设备、制止纠正违章行为。
⑸做好动车组终到后的安全检查和交接。
7、问答题请说出拆卸闸片的步骤?正确答案:⑴切断下侧螺栓的防松铁丝;⑵松开螺栓,取下螺栓和平垫圈(注意防止闸片掉落);⑶用弹簧销卡住闸片底座向车轴相反一侧旋转,拔出闸片(闸片固定而难于拔出时,利用闸片的拉拔孔来拉出)。
8、填空题CRH1动车组车辆总线(MVB)()内各模块之间的数据传递。
正确答案:担负动力单元9、问答题简述CRH1、CRH2、CRH5型动车组的检修周期是如何规定的。
正确答案:动车组运用检修周期分为一、二级。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《动车组传动与控制》作业参考答案
作业二(4章)答案
一、名词解释:
1.标量控制:只对变量的幅值进行控制。
2.矢量控制:对变量的幅值和相位都进行控制。
3.(异步牵引电动机)恒磁通调速:根据交流电动机定子绕组感应电势公式
当电源电压一定时,如果降低频率,则主磁通要增大,基频(额定频率)以下主磁通增加势必使主磁路过饱和,励磁电流增加,铁心损耗也相应增加,这是不允许的。
为此调频时一定要调节电势,保持感应电势与频率的比值不变,即可保持主磁通不变。
4.(异步牵引电动机)恒功率调速:在恒磁通控制中,随着频率和转速的上升,电压U1也相应提高,牵
引电动机的输出功率增大,但电压的提高受到电动机功率或逆变器最大电压的限制。
通常调节频率大于基准频率f1>f1N时,即当电压提高到一定数值后维持不变或将不再正比于f1上升,此后电动机磁通开始减小,将进入恒功率控制方式。
由于
由此可见,电动机按恒功率运行,电压与频率的调节可采用两种不同的方式,即U1=C,s=C的调节方式和f2=C,U12/f 1=C的调节方式。
二、简答题:
1.简述异步电动机变压变频调速控制发展的三个阶段。
答:异步电动机变压变频调速控制发展的三个阶段如下:
(1)普通功能型U f控制方式的通用变频器。
其转速开环控制,不具有转矩控制功能。
(2)高功能型的转差频率控制。
其转速需要闭环检测,具有转矩控制功能,能使电机在恒磁通或恒功率下运行,能充分发挥电机的运行效率,其输出静态特性较U f控制方式有较大改进。
(3)高性能矢量控制或直接力矩控制。
可以实现直流电动机的控制特性,具有较高的动态性能。
前两种方法都是基于异步电动机稳态数学模型建立的。
而矢量控制是基于异步电动机动态数
学模型的基础上建立的。
2.简述异步电动机变压变频调速的基本控制方式。
答:异步电动机变压变频调速的控制特性如下图所示:
(1)基频以下调速:保持m Φ不变,使:/1E f C g =,即采用恒值电动势频率比的控制方式。
但绕组
中的感应电动势是难以直接控制的,当电动势值较高时,可以忽略定子绕组的漏磁阻抗压降,而认为定子相电压U s ≈E g ,则得:/1U f C S =。
属于“恒转矩调速”。
(2)基频以上调速:在基频以上调速时,定子电压U s 不能超过额定电压U sN ,最多只能保持
U s =U sN ,这将迫使磁通与频率成反比地降低,相当于直流电机弱磁升速的情况。
属于“恒功率调速”
3.异步电动机转差频率控制的规律是什么?
答:(1)在s ω≤sm ω的范围内,如图1所示,转矩e T 基本上与s ω成正比,条件是气隙磁通m Φ不变。
(2)在不同的定子电流值时,按图2的函数关系()1,s s U f I ω=控制定子电压和频率,就能保持
气隙磁通m Φ恒定。
图1 按恒m Φ值控制的()e s T f ω=特性
图2 不同定子电流时,恒1g E ω控制所需的电压-频率特性
4.简述异步电动机矢量控制的基本思想。
答:将三相异步电动机经3/2变换、2s/2r 变换,变换到以转子磁场定向的M 、T 同步坐标系,并使M
轴定向在转子磁链ψ2方向,就可实现励磁电流i M 和电流i T 的独立控制,使非线性耦合系统解耦,将其等效成直流电动机模型。
然后仿照直流电动机的控制方法,求得直流电动机的控制量,再经过相应的反变换,即可以控制异步电动机。
这就是矢量定向控制的基本思想。
5.简述直接转矩控制的基本思想。
答:将逆变器控制模式和电机运行性能作为一个整体考虑。
它有两层含义:一是保持定子总磁通链不
变,二是对电机转矩进行直接控制。
通过对逆变器的开关控制,既可以实现磁链的幅值控制,又能实现电机转矩的控制,两者都可以通过闭环控制实现。
6.直接转矩控制(DTC )与矢量控制(VC )控制在控制方法上有何异同?
答:相同点:DTC 系统与VC 系统,数学模型本质相同,都是转速(转矩)和磁链闭环控制,都能获得
较高的静、动态性能。
不同点:DTC 系统采用定子磁链控制,受电机参数变化的影响小;转矩采用Band-Band 控制,但有
转矩脉动;采用静止坐标变换,较简单。
磁链闭环控制的VC 系统采用转子磁链控制,受电机转子参数变化的影响;转矩连续控制,比较平滑;采用旋转坐标变换,较复杂。
矢量控制和直接转矩控制都采用对输出转速、磁链分别控制,都需要解耦。
矢量控制采用两相旋转坐标按转子磁链定向,使定子电流的转矩分量与励磁分量解耦;直接转矩控制为双闭环控制系统,其转矩控制环作为内环,转速控制环作为外环,这可抑制磁链变化对转速子系统的影响,使转速和磁链子系统近似解耦。
三、综合分析题:
试分析下图所示异步电动机转差频率控制系统的控制过程。
图1 转差频率控制的转速闭环变压变频调速系统结构原理图
图1为典型的实现转差频率控制规律的转速闭环变压变频调速系统的结构原理图。
转差频率控制系统的控制过程主要包括:
(1)频率控制。
由于在恒定磁链下的转差频率与输出转矩成正比,可认为该速度内环内存在一个转
矩开环控制。
转速调节器ASR 的输出信号是转差频率给定s ω*
,与实测转速信号r ω相加,即得定子频率给
定信号1ω*,即1s r ωωω**
+=,它表明在调速过程中,实际频率1ω随着实际转速r ω同步地上升或下降,有如水涨船高。
因此,加、减速平滑而且稳定,这一关系是转差频率控制系统突出的特点。
同时,在动态过程中转速调节器ASR 饱和,系统能用对应于sm ω的限幅转矩em T 进行控制,保证了在允许条件下的快速性。
在阶跃速度给定下,电机在转差率限幅值下自由地加速,该转差率限幅值对应于定子电流或转矩的限幅值。
最终电机进入稳态运行,此时的转差率由稳态时负载的转矩决定。
(2)电压控制。
由1ω和定子电流反馈信号s I 从微机存储的()1,s s U f I ω=函数中查得定子电压给定
信号s U *,在低速时为克服定子电阻s R 的影响,维持磁通恒定,需要对s U *进行电压补偿。
用s U *和1ω*控制PWM 电压型逆变器,即得异步电动机调速所需的变压变频电源。
(3)系统特性。
转差频率控制的转速闭环调速系统具有很好的抗负载转矩和电网电压波动的能力。
①当负载转矩变化时,如图2(a )所示,如果初始工作点在点1,且负载转矩从L T 变为L T ',速度将会相应地降到点2。
但由于速度控制环作用,频率将会上升,直到在点3处恢复到原来的速度。
②当电网电压变化时,如图2(b )所示,由于没有磁链闭环控制,输入电压的变化将导致磁链改变。
初始工作点为曲线上的点1,输入电压的下降将会减小磁链,从而工作点移动到点2处,导致的速度降落将会作用在速度环上且使频率上升,最终恢复到曲线c 上的点1。
该系统在弱磁情况下也能良好地工作。
图2 转差频率控制的转速闭环变压变频调速系统的动态调节过程
(a)负载转矩变化的影响;(b)电源电压变化的影响
可见,转速闭环转差频率控制VVVF 调速系统能够像直流电机双闭环控制系统那样具有较
好的静、动态性能,是一个比较优越的控制策略,结构也不算复杂。