单片机设计电路之超声波发射与接收电路原理图及PCB图
超声波发射和接收电路
超声波发射和接收电路在本设计中,我们设计的发射和接收电路都是分别只有一个,通过继电器进行顺、逆流方向收发电路的切换,这样做既降低了成本,又消除了非对称性电路误差,且发射脉冲通过使用单独的继电器分别对发射和接收换能器进行控制,使换能器的发射和接收电路完全隔离,消除了发射信号对接收的影响。
4.2.1超声波发射电路接收信号的大小和好坏直接取决于发射传感器的发射信号,由于使用收发共用型超声换能器,所以除了选用性能优良的超声波传感器外,发射电路和前级信号接收电路至关重要,它决定着整个系统的灵敏度和精度。
超声波测量最常用的换能器发射电路大体可分为三种类型:窄脉冲触发的宽带激励电路、调制脉冲谐振电路和单脉冲发射电路。
从早先国内进口的日本超声波流量计来看,基本都采用的是窄脉冲驱动电路。
这种电路在设计上一般是用一个极快速的电子开关通过对储能元件的放电来实现,这些开关器件通常为晶闸管或大功率场效应管(MOSFET)。
由于需要输出激励信号的瞬时功率大,因此开关器件必须由直流高压供电,一般要达到几十到一百伏以上,这在电池供电的系统中无法实现;此外,开关瞬间会产生高压脉冲,对整个电路的抗干扰设计不利。
而脉冲谐振电路设计起来比较简单,其基本方法是用振荡电路产生一个高频振荡,经过幅值和功率放大后接至换能器,使换能器发出超声波,确保高频振荡的频率与换能器固有频率一致,则可获得超声发射的最佳效果。
谐振电路能够使用较低的电压产生较强的超声波发射,适合使用电池供电的系统,而且它能精确地控制发射信号,效率高。
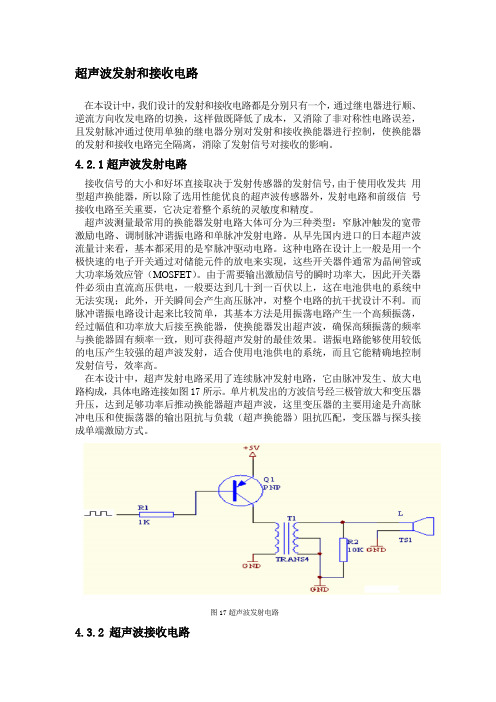
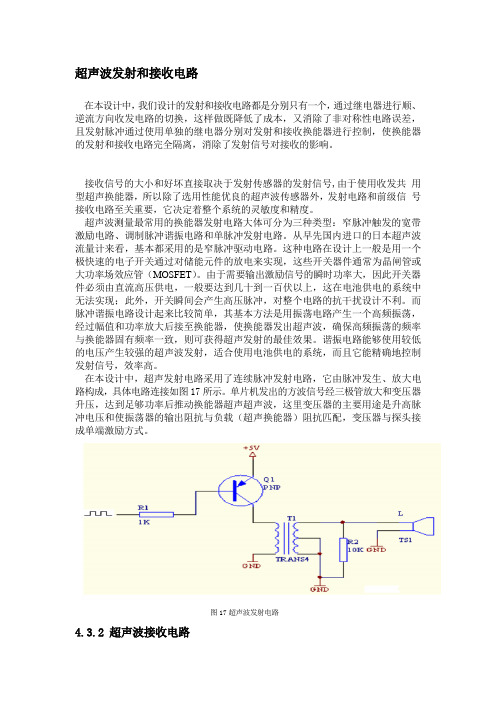
在本设计中,超声发射电路采用了连续脉冲发射电路,它由脉冲发生、放大电路构成,具体电路连接如图17所示。
单片机发出的方波信号经三极管放大和变压器升压,达到足够功率后推动换能器超声超声波,这里变压器的主要用途是升高脉冲电压和使振荡器的输出阻抗与负载(超声换能器)阻抗匹配,变压器与探头接成单端激励方式。
图17超声波发射电路4.3.2 超声波接收电路发射换能器发出超声波信号后,信号经过流体传播到接收换能器,中间有杂 质和气泡等影响,强度不断减小,并且强度也不稳定。
超声波发射和接收电路
超声波发射和接收电路在本设计中,我们设计的发射和接收电路都是分别只有一个,通过继电器进行顺、逆流方向收发电路的切换,这样做既降低了成本,又消除了非对称性电路误差,且发射脉冲通过使用单独的继电器分别对发射和接收换能器进行控制,使换能器的发射和接收电路完全隔离,消除了发射信号对接收的影响。
接收信号的大小和好坏直接取决于发射传感器的发射信号,由于使用收发共用型超声换能器,所以除了选用性能优良的超声波传感器外,发射电路和前级信号接收电路至关重要,它决定着整个系统的灵敏度和精度。
超声波测量最常用的换能器发射电路大体可分为三种类型:窄脉冲触发的宽带激励电路、调制脉冲谐振电路和单脉冲发射电路。
从早先国内进口的日本超声波流量计来看,基本都采用的是窄脉冲驱动电路。
这种电路在设计上一般是用一个极快速的电子开关通过对储能元件的放电来实现,这些开关器件通常为晶闸管或大功率场效应管(MOSFET)。
由于需要输出激励信号的瞬时功率大,因此开关器件必须由直流高压供电,一般要达到几十到一百伏以上,这在电池供电的系统中无法实现;此外,开关瞬间会产生高压脉冲,对整个电路的抗干扰设计不利。
而脉冲谐振电路设计起来比较简单,其基本方法是用振荡电路产生一个高频振荡,经过幅值和功率放大后接至换能器,使换能器发出超声波,确保高频振荡的频率与换能器固有频率一致,则可获得超声发射的最佳效果。
谐振电路能够使用较低的电压产生较强的超声波发射,适合使用电池供电的系统,而且它能精确地控制发射信号,效率高。
在本设计中,超声发射电路采用了连续脉冲发射电路,它由脉冲发生、放大电路构成,具体电路连接如图17所示。
单片机发出的方波信号经三极管放大和变压器升压,达到足够功率后推动换能器超声超声波,这里变压器的主要用途是升高脉冲电压和使振荡器的输出阻抗与负载(超声换能器)阻抗匹配,变压器与探头接成单端激励方式。
图17超声波发射电路4.3.2 超声波接收电路发射换能器发出超声波信号后,信号经过流体传播到接收换能器,中间有杂 质和气泡等影响,强度不断减小,并且强度也不稳定。
超声波发射接收电路
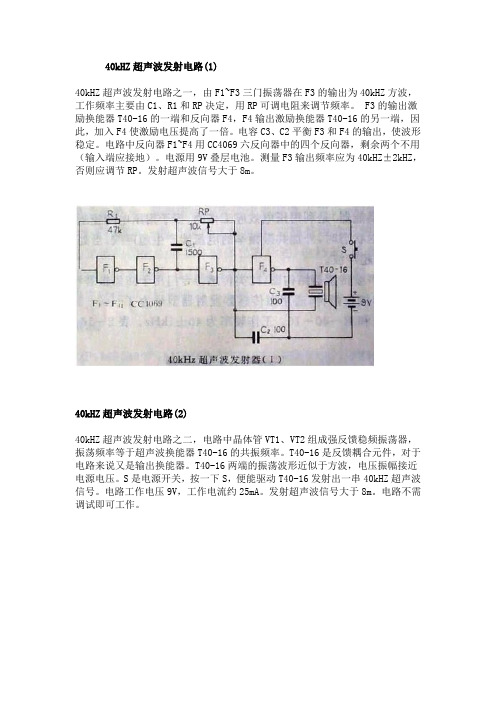
40kHZ超声波发射电路(1)40kHZ超声波发射电路之一,由F1~F3三门振荡器在F3的输出为40kHZ方波,工作频率主要由C1、R1和RP决定,用RP可调电阻来调节频率。
F3的输出激励换能器T40-16的一端和反向器F4,F4输出激励换能器T40-16的另一端,因此,加入F4使激励电压提高了一倍。
电容C3、C2平衡F3和F4的输出,使波形稳定。
电路中反向器F1~F4用CC4069六反向器中的四个反向器,剩余两个不用(输入端应接地)。
电源用9V叠层电池。
测量F3输出频率应为40kHZ±2kH Z,否则应调节RP。
发射超声波信号大于8m。
40kHZ超声波发射电路(2)40kHZ超声波发射电路之二,电路中晶体管VT1、VT2组成强反馈稳频振荡器,振荡频率等于超声波换能器T40-16的共振频率。
T40-16是反馈耦合元件,对于电路来说又是输出换能器。
T40-16两端的振荡波形近似于方波,电压振幅接近电源电压。
S是电源开关,按一下S,便能驱动T40-16发射出一串40kHZ超声波信号。
电路工作电压9V,工作电流约25mA。
发射超声波信号大于8m。
电路不需调试即可工作。
40kHZ超声波发射电路(3)40kHZ超声波发射电路之三,由VT1、VT2组成正反馈回授振荡器。
电路的振荡频率决定于反馈元件的T40-16,其谐振频率为40kHZ±2kHZ。
频率稳定性好,不需作任何调整,并由T40-16作为换能器发出40kHZ的超声波信号。
电感L1与电容C2调谐在40kHZ起作谐振作用。
本电路适应电压较宽(3~12V),且频率不变。
电感采用固定式,电感量5.1mH。
整机工作电流约25mA。
发射超声波信号大于8m。
40kHZ超声波发射电路(4)40kHZ超声波发射电路之四,它主要由四与非门电路CC4011完成振荡及驱动功能,通过超声换能器T40-16辐射出超声波去控制接收机。
其中门YF1与门YF2组成可控振荡器,当 S按下时,振荡器起振,调整RP改变振荡频率,应为40kHZ。
超声波接收电路图
超声波接收电路图
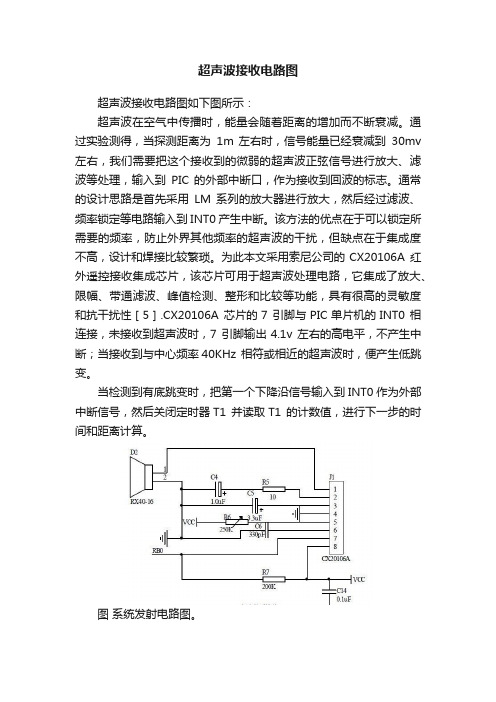
超声波接收电路图如下图所示:
超声波在空气中传播时,能量会随着距离的增加而不断衰减。
通过实验测得,当探测距离为1m 左右时,信号能量已经衰减到30mv 左右,我们需要把这个接收到的微弱的超声波正弦信号进行放大、滤波等处理,输入到PIC 的外部中断口,作为接收到回波的标志。
通常的设计思路是首先采用LM 系列的放大器进行放大,然后经过滤波、频率锁定等电路输入到INT0 产生中断。
该方法的优点在于可以锁定所需要的频率,防止外界其他频率的超声波的干扰,但缺点在于集成度不高,设计和焊接比较繁琐。
为此本文采用索尼公司的CX20106A 红外遥控接收集成芯片,该芯片可用于超声波处理电路,它集成了放大、限幅、带通滤波、峰值检测、整形和比较等功能,具有很高的灵敏度和抗干扰性[5].CX20106A 芯片的7 引脚与PIC单片机的INT0 相连接,未接收到超声波时,7 引脚输出4.1v 左右的高电平,不产生中断;当接收到与中心频率40KHz 相符或相近的超声波时,便产生低跳变。
当检测到有底跳变时,把第一个下降沿信号输入到INT0 作为外部中断信号,然后关闭定时器T1 并读取T1 的计数值,进行下一步的时间和距离计算。
图系统发射电路图。
单片机超声波测距原理及电路图

单片机超声波测距原理及电路图来源:作者:时间:2007-12-22 内容提要: 超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离关键词: 电路 原理 超声波 中断 发射 程序 单片机 时间 系统 产生超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。
为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。
本文所介绍的三方向(前、左、右)超声波测距系统,就是为机器人了解其前方、左侧和右侧的环境而提供一个运动距离信息。
二、超声波测距原理1、超声波发生器为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。
总体上讲,超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。
电气方式包括压电型、磁致伸缩型和电动型等;机械方式有加尔统笛、液哨和气流旋笛等。
它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。
目前较为常用的是压电式超声波发生器。
2、压电式超声波发生器原理压电式超声波发生器实际上是利用压电晶体的谐振来工作的。
超声波发生器内部结构如图1所示,它有两个压电晶片和一个共振板。
当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。
反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。
3、超声波测距原理超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
(完整word版)超声波发射和接收电路
超声波发射和接收电路在本设计中,我们设计的发射和接收电路都是分别只有一个,通过继电器进行顺、逆流方向收发电路的切换,这样做既降低了成本,又消除了非对称性电路误差,且发射脉冲通过使用单独的继电器分别对发射和接收换能器进行控制,使换能器的发射和接收电路完全隔离,消除了发射信号对接收的影响。
4.2.1超声波发射电路接收信号的大小和好坏直接取决于发射传感器的发射信号,由于使用收发共用型超声换能器,所以除了选用性能优良的超声波传感器外,发射电路和前级信号接收电路至关重要,它决定着整个系统的灵敏度和精度.超声波测量最常用的换能器发射电路大体可分为三种类型:窄脉冲触发的宽带激励电路、调制脉冲谐振电路和单脉冲发射电路。
从早先国内进口的日本超声波流量计来看,基本都采用的是窄脉冲驱动电路.这种电路在设计上一般是用一个极快速的电子开关通过对储能元件的放电来实现,这些开关器件通常为晶闸管或大功率场效应管(MOSFET).由于需要输出激励信号的瞬时功率大,因此开关器件必须由直流高压供电,一般要达到几十到一百伏以上,这在电池供电的系统中无法实现;此外,开关瞬间会产生高压脉冲,对整个电路的抗干扰设计不利。
而脉冲谐振电路设计起来比较简单,其基本方法是用振荡电路产生一个高频振荡,经过幅值和功率放大后接至换能器,使换能器发出超声波,确保高频振荡的频率与换能器固有频率一致,则可获得超声发射的最佳效果。
谐振电路能够使用较低的电压产生较强的超声波发射,适合使用电池供电的系统,而且它能精确地控制发射信号,效率高.在本设计中,超声发射电路采用了连续脉冲发射电路,它由脉冲发生、放大电路构成,具体电路连接如图17所示。
单片机发出的方波信号经三极管放大和变压器升压,达到足够功率后推动换能器超声超声波,这里变压器的主要用途是升高脉冲电压和使振荡器的输出阻抗与负载(超声换能器)阻抗匹配,变压器与探头接成单端激励方式。
图17超声波发射电路4.3。
2 超声波接收电路发射换能器发出超声波信号后,信号经过流体传播到接收换能器,中间有杂 质和气泡等影响,强度不断减小,并且强度也不稳定。
用51单片机设计超声波测距系统的设计原理及电路(附源程序)
基于51单片机的超声波测距仪说明书引言超声波测距仪,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
利用超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制。
一、性能要求该超声波测距仪,要求测量范围在0.08-3.00m,测量精度1cm,测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
二、工作原理及方案论证超声波传感器及其测距原理超声波是指频率高于20KHz的机械波。
用超声波传感器产生超声波和接收超声波,习惯上称为超声波换能器或超声波探头。
超声波传感器有发送器和接收器.超声波传感器是利用压电效应的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(timeofflight)。
首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离。
根据要求并综合各方面因素,采用AT89C52单片机作为主控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器完成,超声波测距仪的系统框图如下图所示:图1 超声波测距仪系统设计框图三、系统硬件部分硬件部分主要由单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分组成。
1.单片机系统及显示电路单片机采用AT89C52来实现对CX20106A红外接收芯片和TCT40-10系列超声波转换模块的控制。
单片机通过P1.1引脚发射脉冲控制超声波的发送,然后单片机不停的检测外中断0口INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。
计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离。
显示电路采用简单实用的4位共阳LED数码管,段码用74LS244驱动,位码用PNP三极管驱动。
单片机超声波测距原理及电路图

单片机超声波测距原理及电路图来源:作者:时间:内容提要:超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离关键词:电路原理超声波中断发射程序单片机时间系统产生超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。
为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。
本文所介绍的三方向(前、左、右)超声波测距系统,就是为机器人了解其前方、左侧和右侧的环境而提供一个运动距离信息。
二、超声波测距原理1、超声波发生器为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。
总体上讲,超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。
电气方式包括压电型、磁致伸缩型和电动型等;机械方式有加尔统笛、液哨和气流旋笛等。
它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。
目前较为常用的是压电式超声波发生器。
2、压电式超声波发生器原理压电式超声波发生器实际上是利用压电晶体的谐振来工作的。
超声波发生器内部结构如图1所示,它有两个压电晶片和一个共振板。
当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。
反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。
3、超声波测距原理超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2图1 超声波传感器结构这就是所谓的时间差测距法。
(整理)用51单片机设计超声波测距系统的设计原理及电路附源程序
基于51单片机的超声波测距仪说明书引言超声波测距仪,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
利用超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制。
一、性能要求该超声波测距仪,要求测量范围在0.08-3.00m,测量精度1cm,测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
二、工作原理及方案论证超声波传感器及其测距原理超声波是指频率高于20KHz的机械波。
用超声波传感器产生超声波和接收超声波,习惯上称为超声波换能器或超声波探头。
超声波传感器有发送器和接收器.超声波传感器是利用压电效应的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(timeofflight)。
首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离。
根据要求并综合各方面因素,采用AT89C52单片机作为主控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器完成,超声波测距仪的系统框图如下图所示:图1 超声波测距仪系统设计框图三、系统硬件部分硬件部分主要由单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分组成。
1.单片机系统及显示电路单片机采用AT89C52来实现对CX20106A红外接收芯片和TCT40-10系列超声波转换模块的控制。
单片机通过P1.1引脚发射脉冲控制超声波的发送,然后单片机不停的检测外中断0口INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。
计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离。
显示电路采用简单实用的4位共阳LED数码管,段码用74LS244驱动,位码用PNP三极管驱动。
超声波发射接收电路图

40kHZ超声波发射/接收电路综述40kHZ超声波发射电路(1)40kHZ超声波发射电路之一,由F1~F3三门振荡器在F3的输出为40kHZ方波,工作频率主要由C1、R1和RP决定,用RP可调电阻来调节频率。
F3的输出激励换能器T40-16的一端和反向器F4,F4输出激励换能器T40-16的另一端,因此,加入F4使激励电压提高了一倍。
电容C3、C2平衡F3和F4的输出,使波形稳定。
电路中反向器F1~F4用CC4069六反向器中的四个反向器,剩余两个不用(输入端应接地)。
电源用9V叠层电池。
测量F3输出频率应为40kHZ±2kHZ,否则应调节RP。
发射超声波信号大于8m。
40kHZ超声波发射电路(2)40kHZ超声波发射电路之二,电路中晶体管VT1、VT2组成强反馈稳频振荡器,振荡频率等于超声波换能器T40-16的共振频率。
T40-16是反馈耦合元件,对于电路来说又是输出换能器。
T40-16两端的振荡波形近似于方波,电压振幅接近电源电压。
S是电源开关,按一下S,便能驱动T40-16发射出一串40kHZ超声波信号。
电路工作电压9V,工作电流约25mA。
发射超声波信号大于8m。
电路不需调试即可工作。
40kHZ超声波发射电路(3)40kHZ超声波发射电路之三,由VT1、VT2组成正反馈回授振荡器。
电路的振荡频率决定于反馈元件的T40-16,其谐振频率为40kHZ±2kHZ。
频率稳定性好,不需作任何调整,并由T40-16作为换能器发出40kHZ的超声波信号。
电感L1与电容C2调谐在40kHZ起作谐振作用。
本电路适应电压较宽(3~12V),且频率不变。
电感采用固定式,电感量5.1mH。
整机工作电流约25mA。
发射超声波信号大于8m。
40kHZ超声波发射电路(4)40kHZ超声波发射电路之四,它主要由四与非门电路CC4011完成振荡及驱动功能,通过超声换能器T40-16辐射出超声波去控制接收机。
用51单片机设计超声波测距系统的设计原理及电路(附源程序)
基于51单片机的超声波测距仪说明书引言超声波测距仪,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
利用超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制。
一、性能要求该超声波测距仪,要求测量范围在0.08-3.00m,测量精度1cm,测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
二、工作原理及方案论证超声波传感器及其测距原理超声波是指频率高于20KHz的机械波。
用超声波传感器产生超声波和接收超声波,习惯上称为超声波换能器或超声波探头。
超声波传感器有发送器和接收器.超声波传感器是利用压电效应的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(timeofflight)。
首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离。
根据要求并综合各方面因素,采用AT89C52单片机作为主控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器完成,超声波测距仪的系统框图如下图所示:图1 超声波测距仪系统设计框图三、系统硬件部分硬件部分主要由单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分组成。
1.单片机系统及显示电路单片机采用AT89C52来实现对CX20106A红外接收芯片和TCT40-10系列超声波转换模块的控制。
单片机通过P1.1引脚发射脉冲控制超声波的发送,然后单片机不停的检测外中断0口INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。
计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离。
显示电路采用简单实用的4位共阳LED数码管,段码用74LS244驱动,位码用PNP三极管驱动。
超声波发射电路与接收电路设计_高忠义

>才智/200超声波发射电路与接收电路设计高忠义 谢玲 侯雅波 袁秀艳 高萍 白城职业技术学院 137000摘要:本设计主要采用555振荡器、RS 触发器、分频器、信号发生器、换能器等进行信号的发射,使用放大器、RS 触发器、分频器换能器等进行信号的接收。
关键词:超声波传感器;振荡器;分频器;触发器车总人数为290人,下车总人数为380人,9:00~10:00下车总人数为220人,上车总人数为190人,10:00~11:00下车总人数为190人,上车总人数为187人,11:00~12:00下车总人数为340人,上车总人数为265人,13:00~14:00下车总人数为210人,上车总人数为186人,14:00~15:00下车总人数为390人,上车总人数为270人,15:00~16:00下车总人数为190人,上车总人数为150人,16:00~17:00下车总人数为190人,上车总人数为120人,17:00~18:00下车总人数为340人,上车总人数为270人, 18:00~19:00下车总人数为260人,上车总人数为220人,19:00~20:00下车总人数为220人,上车总人数为190人,20:00~21:00下车总人数为200人,上车总人数为165人,可根据不同时段的人流量进行公交车合理调度。
如图2所示2路公交车各时间段乘客上下车情况。
图2 2路公交车各时间段乘客上下车情况在制定2路公交车发车时刻表时,考虑到公交公司的利益和公交调度方案的可行性,可将上午7:00~8:00时间段内尽量少发车,在11:00~12:00时间段的公交车由于乘客较多,可根据需要将其他时间段的公交车进行调整,以满足高峰时期乘客的出行需要,最大程度上实现了公交区位的优化,同时保证了公交公司的利益也保证了乘客的利益。
2公交线路平均站点间距的优化研究由于站点间距优化问题的复杂性,以及站距优化能带来很显著的经济和社会效益。
目前,国内外已经有许多关于公交站点间距优化的研究成果。
(注意接收电路图)基于单片机的超声波测距原理
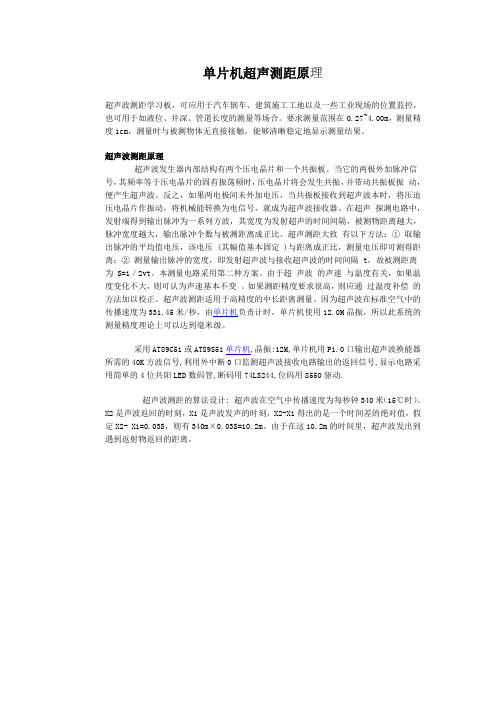
单片机超声测距原理超声波测距学习板,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
要求测量范围在0.27~4.00m,测量精度1cm,测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
超声波测距原理超声波发生器内部结构有两个压电晶片和一个共振板。
当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。
反之,如果两电极间未外加电压,当共振板接收到超声波本时,将压迫压电晶片作振动,将机械能转换为电信号,就成为超声波接收器。
在超声探测电路中,发射端得到输出脉冲为一系列方波,其宽度为发射超声的时间间隔,被测物距离越大,脉冲宽度越大,输出脉冲个数与被测距离成正比。
超声测距大致有以下方法:① 取输出脉冲的平均值电压,该电压 (其幅值基本固定 )与距离成正比,测量电压即可测得距离;② 测量输出脉冲的宽度,即发射超声波与接收超声波的时间间隔 t,故被测距离为 S=1/2vt。
本测量电路采用第二种方案。
由于超声波的声速与温度有关,如果温度变化不大,则可认为声速基本不变。
如果测距精度要求很高,则应通过温度补偿的方法加以校正。
超声波测距适用于高精度的中长距离测量。
因为超声波在标准空气中的传播速度为331.45米/秒,由单片机负责计时,单片机使用12.0M晶振,所以此系统的测量精度理论上可以达到毫米级。
采用AT89C51或AT89S51单片机,晶振:12M,单片机用P1.0口输出超声波换能器所需的40K方波信号,利用外中断0口监测超声波接收电路输出的返回信号,显示电路采用简单的4位共阳LED数码管,断码用74LS244,位码用8550驱动.超声波测距的算法设计: 超声波在空气中传播速度为每秒钟340米(15℃时)。
X2是声波返回的时刻,X1是声波发声的时刻,X2-X1得出的是一个时间差的绝对值,假定X2- X1=0.03S,则有340m×0.03S=10.2m。
超声波发射接收电路
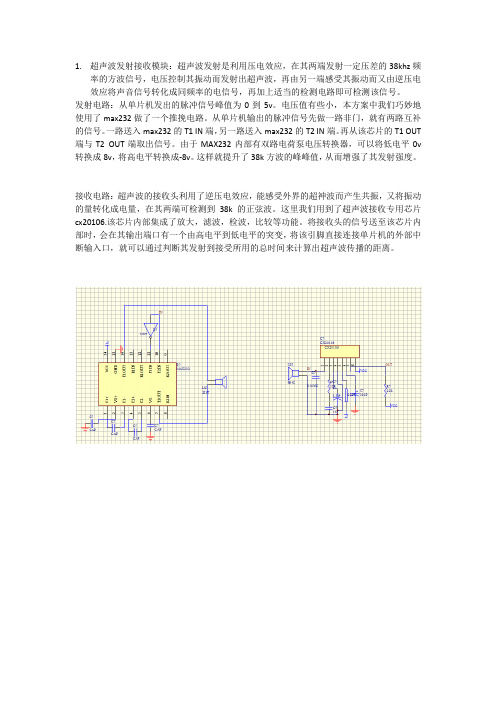
1.超声波发射接收模块:超声波发射是利用压电效应,在其两端发射一定压差的38khz频
率的方波信号,电压控制其振动而发射出超声波,再由另一端感受其振动而又由逆压电效应将声音信号转化成同频率的电信号,再加上适当的检测电路即可检测该信号。
发射电路:从单片机发出的脉冲信号峰值为0到5v。
电压值有些小,本方案中我们巧妙地使用了max232做了一个推挽电路。
从单片机输出的脉冲信号先做一路非门,就有两路互补的信号。
一路送入max232的T1 IN端,另一路送入max232的T2 IN端。
再从该芯片的T1 OUT 端与T2 OUT端取出信号。
由于MAX232内部有双路电荷泵电压转换器,可以将低电平0v 转换成8v,将高电平转换成-8v。
这样就提升了38k方波的峰峰值,从而增强了其发射强度。
接收电路:超声波的接收头利用了逆压电效应,能感受外界的超神波而产生共振,又将振动的量转化成电量,在其两端可检测到38k的正弦波。
这里我们用到了超声波接收专用芯片cx20106.该芯片内部集成了放大,滤波,检波,比较等功能。
将接收头的信号送至该芯片内部时,会在其输出端口有一个由高电平到低电平的突变,将该引脚直接连接单片机的外部中断输入口,就可以通过判断其发射到接受所用的总时间来计算出超声波传播的距离。