详解开关电源斜坡补偿的推导过程
斜坡补偿技术
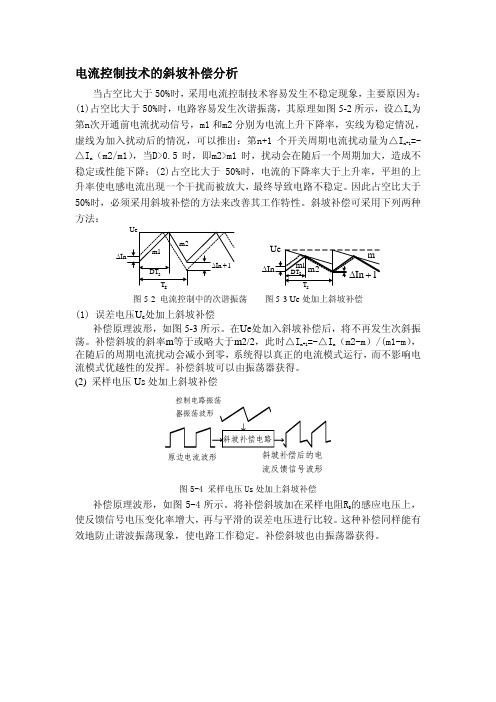
电流控制技术的斜坡补偿分析当占空比大于50%时,采用电流控制技术容易发生不稳定现象,主要原因为:(1)占空比大于50%时,电路容易发生次谐振荡,其原理如图5-2所示,设△I n 为第n次开通前电流扰动信号,m1和m2分别为电流上升下降率,实线为稳定情况,虚线为加入扰动后的情况,可以推出:第n+1个开关周期电流扰动量为△I n+1=-△I n (m2/m1),当D>0.5时,即m2>m1时,扰动会在随后一个周期加大,造成不稳定或性能下降;(2)占空比大于50%时,电流的下降率大于上升率,平坦的上升率使电感电流出现一个干扰而被放大,最终导致电路不稳定。
因此占空比大于50%时,必须采用斜坡补偿的方法来改善其工作特性。
斜坡补偿可采用下列两种方法:ΔΔ图5-2 电流控制中的次谐振荡 图5-3 Ue 处加上斜坡补偿(1) 误差电压U e 处加上斜坡补偿补偿原理波形,如图5-3所示。
在Ue 处加入斜坡补偿后,将不再发生次斜振荡。
补偿斜坡的斜率m 等于或略大于m2/2,此时△I n+1=-△I n (m2-m)/(m1-m),在随后的周期电流扰动会减小到零,系统得以真正的电流模式运行,而不影响电流模式优越性的发挥。
补偿斜坡可以由振荡器获得。
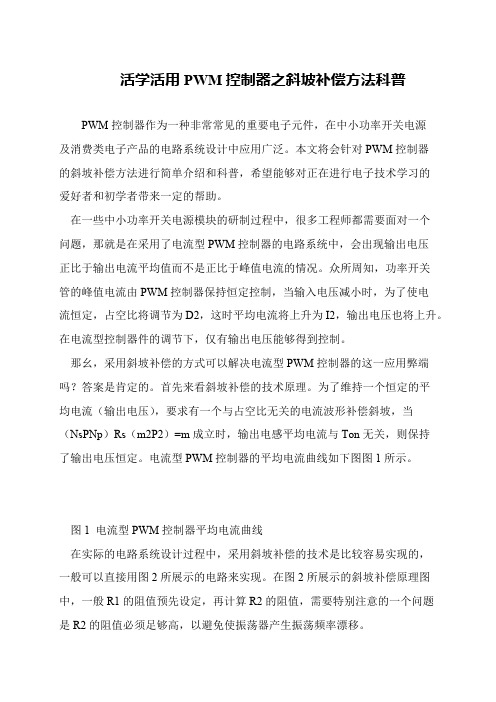
(2) 采样电压Us 处加上斜坡补偿斜坡补偿电路器振荡波形控制电路振荡原边电流波形流反馈信号波形斜坡补偿后的电图5-4 采样电压Us 处加上斜坡补偿补偿原理波形,如图5-4所示。
将补偿斜坡加在采样电阻R S 的感应电压上,使反馈信号电压变化率增大,再与平滑的误差电压进行比较。
这种补偿同样能有效地防止谐波振荡现象,使电路工作稳定。
补偿斜坡也由振荡器获得。
活学活用PWM控制器之斜坡补偿方法科普
活学活用PWM控制器之斜坡补偿方法科普
PWM控制器作为一种非常常见的重要电子元件,在中小功率开关电源
及消费类电子产品的电路系统设计中应用广泛。
本文将会针对PWM控制器
的斜坡补偿方法进行简单介绍和科普,希望能够对正在进行电子技术学习的
爱好者和初学者带来一定的帮助。
在一些中小功率开关电源模块的研制过程中,很多工程师都需要面对一个
问题,那就是在采用了电流型PWM控制器的电路系统中,会出现输出电压
正比于输出电流平均值而不是正比于峰值电流的情况。
众所周知,功率开关
管的峰值电流由PWM控制器保持恒定控制,当输入电压减小时,为了使电
流恒定,占空比将调节为D2,这时平均电流将上升为I2,输出电压也将上升。
在电流型控制器件的调节下,仅有输出电压能够得到控制。
那幺,采用斜坡补偿的方式可以解决电流型PWM控制器的这一应用弊端吗?答案是肯定的。
首先来看斜坡补偿的技术原理。
为了维持一个恒定的平
均电流(输出电压),要求有一个与占空比无关的电流波形补偿斜坡,当(NsPNp)Rs(m2P2)=m成立时,输出电感平均电流与Ton无关,则保持
了输出电压恒定。
电流型PWM控制器的平均电流曲线如下图图1所示。
图1 电流型PWM控制器平均电流曲线
在实际的电路系统设计过程中,采用斜坡补偿的技术是比较容易实现的,
一般可以直接用图2所展示的电路来实现。
在图2所展示的斜坡补偿原理图中,一般R1的阻值预先设定,再计算R2的阻值,需要特别注意的一个问题
是R2的阻值必须足够高,以避免使振荡器产生振荡频率漂移。
斜坡补偿技术
电流控制技术的斜坡补偿分析当占空比大于50%时,采用电流控制技术容易发生不稳定现象,主要原因为:(1)占空比大于50%时,电路容易发生次谐振荡,其原理如图5-2所示,设△I n 为第n次开通前电流扰动信号,m1和m2分别为电流上升下降率,实线为稳定情况,虚线为加入扰动后的情况,可以推出:第n+1个开关周期电流扰动量为△I n+1=-△I n (m2/m1),当D>0.5时,即m2>m1时,扰动会在随后一个周期加大,造成不稳定或性能下降;(2)占空比大于50%时,电流的下降率大于上升率,平坦的上升率使电感电流出现一个干扰而被放大,最终导致电路不稳定。
因此占空比大于50%时,必须采用斜坡补偿的方法来改善其工作特性。
斜坡补偿可采用下列两种方法:ΔΔ图5-2 电流控制中的次谐振荡 图5-3 Ue 处加上斜坡补偿(1) 误差电压U e 处加上斜坡补偿补偿原理波形,如图5-3所示。
在Ue 处加入斜坡补偿后,将不再发生次斜振荡。
补偿斜坡的斜率m 等于或略大于m2/2,此时△I n+1=-△I n (m2-m)/(m1-m),在随后的周期电流扰动会减小到零,系统得以真正的电流模式运行,而不影响电流模式优越性的发挥。
补偿斜坡可以由振荡器获得。
(2) 采样电压Us 处加上斜坡补偿斜坡补偿电路器振荡波形控制电路振荡原边电流波形流反馈信号波形斜坡补偿后的电图5-4 采样电压Us 处加上斜坡补偿补偿原理波形,如图5-4所示。
将补偿斜坡加在采样电阻R S 的感应电压上,使反馈信号电压变化率增大,再与平滑的误差电压进行比较。
这种补偿同样能有效地防止谐波振荡现象,使电路工作稳定。
补偿斜坡也由振荡器获得。
开关电源中斜坡补偿电路的分析与设计

因此Q4, Q5. Q6. Q7的开启点分别为
Q2 go的集电极电流为上述四个晶体管的集电极电流总和:
因为 Q 4 ,Q 5,Q 6和Q7是先后开启的,所以补偿电流在时间轴上的斜率dl_}dt将随着V05C的增大而增大,即斜坡补偿的量随占空比增大而增大功率 管 的 导通时间结束时,V,由高变低,Ql关断,1.1随即降为零(51。这样可以减少不必要的系统功耗。考虑 不 同 应用情况下m:的变化范围,计算(5)式就可以确定m随D变化的曲线,再根据电流放大器IA的增益和振荡器锯齿波斜率计算可得各元件的尺寸。图 7 是 在选取了元件尺寸后计算机仿真波形。
其中Vosc是理想化的锯齿波to二是输出的补偿电流,如·乓、、Imo, IQ分别Q4, Q5, Q6和Q7的漏极电流可以看到,为了在占空比小于50%的时候系统更加稳定,Q4在每个周期开始时就已经开启,但是电流的斜率较小。随着Vosc以恒定的斜率上升,将先后在t1, t2, t3时达到Q5, Q6和07的开启点。设Q4, Q5, Q6, Q7开启后的电流斜率分别为m4, m5, m6和m7, A3R9
开关 电 源 一般由脉冲宽度控制(PWM)IC、功率开关管、整流二极管和LC滤波电路构成。在中小功率开关电源中,功率开关管可以集成在PWM控制IC内。开关电源按反馈方式分为电压模式和电流模式。电流模式开关电源因其突出的优点而得到了快速的发展和广泛的应用。但是电流模式的结构决定了它存在两个缺点:恒定峰值电流而非恒定平均电流引起的系统开环不稳定:占空比大于50%时系统的开环不稳定[21
设电流采样电阻的阻值为Hale Waihona Puke S,那么叠加在该电阻上压降的斜率为:
4.结论
本文 分 析 了传统电流模式开关电源的工作原理及其优劣,从原理上解释了电流模式在占空比大于50%后输出不稳定的问题和解决的方法。在此基础上本文分析了一个实用的斜坡补偿电路结构并详细分析了其工作过程。通过HSPICE的仿真分析,得到了预期的结果,证明了该电路
关电源中斜坡补偿电路的分析与设计[1]
![关电源中斜坡补偿电路的分析与设计[1]](https://img.taocdn.com/s3/m/55afd8323968011ca300919a.png)
路, 不仅实现了内 部同步补偿, 而且能随占 空比变化自 动调节补偿量。 电路分析和仿真结果表明, 路能弥补传统电流模式的 该电 不足
有效地稳定开关电源的输出电压 关健词 开关电源,电流模式,斜坡补偿,占空比
1 .引言 开关电源是利用现代电力电子技术, 控制开关晶体管 的导通和关断的时间比率, 维持输出电压稳定的一种电源, 它和线性电源相比, 具有效率高、功率密度高、 可以 实现 和 输人电网的电 气隔离等优点, 被誉为 离效节能电 源M 目 前开关电源已经应用到了 各个领域, 尤其在大功率应用 的场合,开关电源具有明显的优势。 开关电源一般由脉冲宽度控制( ) 、 P I 功率开关管、 WM C 整流 二极管和L 滤 路构成。 小功率开 源中, C 波电 在中 关电 功率开 关管可以集成在PM W 控制I C内。 开关电源按反馈方 式分为电压模式和电流模式。电流模式开关电源因其突出 的优点而得到了快速的发展和广泛的 应用。 但是电流模式 的 结构决定了它存在两个缺点: 恒定峰值电流而非恒定平 均电 流引起的系统开环不稳定:占 空比大于 5% 0 时系统的 开环不稳定[ 2 1 本文旨 在从原理上分析传统电流模式的 缺陷及改进方 案,之后分析一个实用的斜坡补偿电路。
m,
波电 一 因 反 路的 可以 简 r 路的 半。 此 馈电 设计 大幅 化 n
④ 改善了负载 调整率。 在电流 模式中, 误差放大器 的带宽更大, 因而负载调整率更好。 3 .电流模式的缺点 3 恒定峰值电流引起的电感平均电流不恒定。 . 1
电流模式的实质是使电感平均电流跟随误差放大器输
图a 电感电流扰动被放大
I= II ( _ I d . g . 一 - 2 ) _ 一 - m t
2 产 2
开关电源斜坡补偿的详细推导
开关电源斜坡补偿的详细推导
直接进入正题,如下图以Buck为例。
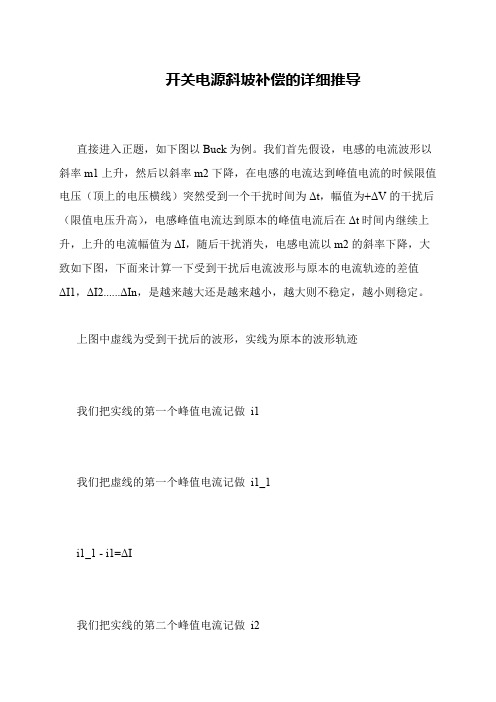
我们首先假设,电感的电流波形以斜率m1上升,然后以斜率m2下降,在电感的电流达到峰值电流的时候限值电压(顶上的电压横线)突然受到一个干扰时间为Δt,幅值为+ΔV的干扰后(限值电压升高),电感峰值电流达到原本的峰值电流后在Δt时间内继续上升,上升的电流幅值为ΔI,随后干扰消失,电感电流以m2的斜率下降,大致如下图,下面来计算一下受到干扰后电流波形与原本的电流轨迹的差值
ΔI1,ΔI2......ΔIn,是越来越大还是越来越小,越大则不稳定,越小则稳定。
上图中虚线为受到干扰后的波形,实线为原本的波形轨迹
我们把实线的第一个峰值电流记做i1
我们把虚线的第一个峰值电流记做i1_1
i1_1 - i1=ΔI
我们把实线的第二个峰值电流记做i2。
峰值电流控制开关电源斜坡补偿的研究

峰值电流控制开关电源斜坡补偿的研究高原邱新芸汪晋宽!东北大学秦皇岛分校河北秦皇岛"##""$%摘要介绍了峰值电流控制开关电源的原理和优点&阐述了峰值电流控制的不稳定性及原因&研究了斜坡补偿与系统稳定性的关系&给出了实际斜坡补偿电路及设计方法&关键词开关电源峰值电流控制斜坡补偿’()*+,-’.,/0,1/2-34(5,-,6’75(895-:;,72<’)//.+,6;24=0)<<2-(0,-(<,.>?@A B ?C D E BF E C G B C H I?C HJ E C K B ?C!LM N O P Q R S O Q N TU T V W Q N S V O XR O Y V T P Z R T [\R M ]Y V T P Z R T [\R M ^__^^‘]a P V T R%b c 3(<48(d e E C f E g h i j?C kl E e m B i j@n j o E m f p E C Hg @o i e j B g g h G@n g i ?Kf B e e i C m f @C m e @h ?e ig e i j i C m i k q r C j m ?s E h E m G C ke i ?j @C j@n g i ?Kf B e e i C m f @C m e @h ?e i?h j @i t g ?m E ?m i k q u i h ?m E @C j p E gs i m o i i Cj h @gf @v g i C j ?m E @C?C kj G j m i v j m ?s E h E m GE j j m B k E i k q w p i g e ?f m E f ?h f E e f B E m ?C kk i j E H Cv i m p @k@n j h @gf @v g i C j ?m E @C?e i H E l i C q x 2+7,<*3y o E m f p E C Hg @o i e j B g g h G d i ?Kf B e e i C m f @C m e @h y h @gf @v g i C j ?m E @Cz 引言电流控制型开关电源]是在传统的d I{电压控制方式的基础上]引入电流反馈]将原有的电压单闭环控制改进为电压电流双闭环控制]以提高电源的性能&电流控制有峰值电流控制和平均值电流控制两种方式&峰值电流方式的控制方法简单]专用芯片多]如|}~!$"#|}~!$#等]应用广泛&但在峰值电流控制的$B f K 系列电路中]由于反馈电流的变化不能全面地反映负载电流变化]当占空比%&’"(]电源不能稳定工作]限制了峰值电流控制方式的应用]必须加以斜坡补偿改善&图)峰值电流控制原理图*峰值电流控制原理及优点+),图)是峰值电流控制原理图&恒频时钟脉冲置位锁存器后开关管导通]变压器初级线圈瞬态电流E )上升]E )经检测电阻u j产生电流反馈电压-j &输出电压-@B m 反馈后与基准电压-e i n 经误差放大器比较放大]得到控制电压-i &当-j 峰值达到-i 电平值时]d I{比较器状态翻转使锁存器复位]开关管截止]等待下一个时钟脉冲&可见]输出电压决定的控制电压和电感电流决定的电流反馈电压共同决定了电源的占空比&峰值电流控制方式显著提高了电源的性能.!)%具有良好的线性调整率和快速的输入输出动态响应&!"%固有的逐个脉冲电流限制]简化了过载和短路保护&!~%消除了输出滤波电感带来的极点]使电源系统由二阶降为一阶]系统不存在有条件的环路稳定性问题&!$%对并联工作的多台电源能够实现自动均流等&第"$卷第$期增刊仪器仪表学报"""~年!月万方数据!峰值电流控制的缺点"#$%系列开关电源的直流负载电流是电感电流的平均值&而峰值电流控制方式的电流反馈电压的是由电感电流的峰值&由于峰值电流和平均值电流间的差别使得电流反馈的变化不能全面地反映负载电流的变化’当电源工作占空比()*+,时&电源不能稳定工作’主要表现在-./0扰动信号产生的误差被逐渐放大&将导致系统失控&电源的抗干扰性能差’图1是()*+,时峰值电流控制的电感电流波形’23是误差放大器输出的控制电压&45+是扰动电流&6/7861分别是电感电流的上升和下降斜率’由图1可知&经过一个周期&由45+引起的电流误差45/945+:616/&可以证明经过;个周期后&45+引起的电流误差45;为-45;945+:616<=/;./0因此&当61>6/?/&即(?*+,时&电流误差45;将逐渐衰减到+&系统稳定@而当61>6/)/&即()*+,时&电流误差45;将逐渐放大&将导致系统失控’电源的抗干扰性能差&不能稳定工作’图1峰值电流控制方式电感电流波形应当说明-峰值电流控制方式中&占空比()*+,时电源工作不稳定是A BC 变换器特有的稳定性问题&它与自动控制理论中的稳定性问题不同’自动控制理论中讨论的稳定性是反馈信号幅值与相位问题@而这里讨论的是脉冲宽度问题’.10输出轻载或空载时电源失控’峰值电流控制开关电源在输出轻载或空载时&输出电流很小或为零&造成电流反馈电压2D 几乎是平的’此时2D 与23进行比较&会使A BC 比较器输出状态不稳定&导致开关管状态难以确定&导致电源失控’E 斜坡补偿和系统稳定性采用加入斜坡补偿的方法&可以实现峰值电流控制开关电源在占空比()*+,时稳定工作’同时&由于占空比的使用范围增大&提高了开关电源变压器的利用效率&在输出相同功率时可使用体积更小的变压器&提高电源小型化和轻量化’加入斜坡补偿的方法有以下两种-./0在控制电压23处加入斜坡补偿电压在控制电压23处叠加斜坡补偿电压形成新控制电压输入到A BC 比较器的一端&与A BC 比较器另一端的电流反馈电压2D 进行比较’图F 是该种补偿方法的原理波形’86是斜坡补偿电压的斜率’由图F 可以证明&经过一个周期&由45+引起的电流误差45/为-45/945+:61866/G6.10经过;个周期后&45+引起的电流误差45;为-45;945+:.61866/G60;.F图F 在23处加斜坡补偿波形如果能保证61866/G6/&占空比在+到/的变化范围内&电流误差45;均将逐渐衰减到+’又有根据(:6/9./8(061&消去6/&可得到加入斜坡补偿后&保证系统稳定的条件是-661)1(8/1(.H 0式.H 0揭说明了峰值电流控制斜坡补偿和电源系统稳定性之间的关系-I 系统未加入斜坡补偿&即69+时&稳定的条件是占空比必须小于*+,’J 加入斜坡补偿后&当补偿斜坡斜率大于电感电流下降斜率的一半时&即6)+K *61&在+?(?/的范围内&式.H 0恒成立&系统始终是稳定的’实际设计中斜坡斜率常取为61的+K L M+K N 倍’.10在电流反馈电压2D 处加入斜坡补偿电压图H 是该种补偿方法的原理框图’通过斜坡补偿O//第H 期增刊峰值电流控制开关电源斜坡补偿的研究万方数据电路!在电流反馈电压上叠加由振荡器振荡波形形成的斜坡补偿电压!产生反馈电压"#$输入到%&’比较器的一端!与%&’比较器另一端的控制电压"(进行比较!去控制电源的占空比)该种补偿方法与前一种补偿方法相比其结果是等效的!由于该方法实现电路简单!较为常用)图*在"$处加斜坡补偿原理图加入斜坡补偿同时可解决电源输出轻载或空载时失控问题)当加入一定斜率的斜坡补偿电压后!在电源轻载或空载时!原有的电流反馈电压不起作用!而是靠斜坡补偿电压完成%&’控制!解轻载或空载失控问题)+斜坡补偿电路设计斜坡补偿电路如图,所示)所用电流控制芯片为-./0*1)采用在电流反馈电压处加入斜坡补偿电压的方法)2"34.经56和51构成的分压网络!产生斜坡补偿电压叠加到电流反馈电压上!实现斜坡补偿)56和51的值决定了斜坡补偿量)交流耦合电容.6去掉了振荡器电压的直流分量!仅将交流分量耦合到51)电容.1和56组成57.滤波电路!抑制了反馈电流上升沿瞬时脉冲的干扰).8和54是定时电容和电流检测电阻)2"34.是芯片振荡器锯齿波电压的峰9峰值!手册中可以查到)图,斜坡补偿电路在斜坡补偿电路设计时!还应先确定以下几个参数:输出电压值-3-8;输出电感器<3-8;变压器匝数比=;开关管最大开通时间83=>?@A B>可大于,C DB ;检测电阻54阻值等)斜坡补偿电路设计步骤如下:>6B 计算输出电感电流下降斜坡斜率?#1#1EF G F H E -3-8<3-8>1B计算反映到初级的电感电流下降斜坡斜率11E#1=>/B 计算电感电流反馈电压"4下降斜坡斜率"4"4E ?1I 54>*B 计算振荡器充电斜坡斜率"34."34.E2"34.83=>?@A B>,B 确定斜坡补偿比例’和56;51阻值’E1E "34.I56"4I51!通常’EC J K ,)令56E6L M !则51E "34.I56"4I’>N B计算斜坡补偿后加到芯片电流检测输入端的反馈电压"#4"#4E"4I5156O51O"34.I5656O51其中:"#46E"4I5156O51是由电感电流形成的反馈电压P "#41E"34.I5656O51是斜坡补偿电压)Q 结论峰值电流控制是一种较理想的开关电源控制方式)当工作占空比小于,C D!电源工作稳定!但变压器的利用率较低)如工作占空比大于,C D!电源工作不稳定!出现失控现象)加入斜率大于电感电流下降斜率,C D 的补偿斜坡后!可使电源占空比在C R S R6的变化范围内都是稳定的!提高了电源的抗干扰能力!同时占空比使用范围的扩大!增大了变压器的利用率!促进开关电源的小型化和轻量化)参考文献6王创社等T 开关电源两种控制模式的分析与比较T 电力电子技术!6U U 0!>/B :K 0906T1李峻T 开关集成稳压器控制器的原理及应用T 人民交通出版社!6U U K 年/V J .J <((!W J S J V @X Y J 3Z H G ?@[S ($G Y X 4H \@H (Y ]^_4‘G H a b G X Y .^X c (\H (\$d ?Z [^]G X Y .e \\(X H f X g (a H (F a ^X H \^[J f d d d H \@X $@a H G ^X $^X@(\^$Z @a (@X F([(a H \^X G a$]$H (?$!6U 0,!16>K B :16h/,T C16仪器仪表学报第1*卷万方数据峰值电流控制开关电源斜坡补偿的研究作者:高原, 邱新芸, 汪晋宽作者单位:东北大学秦皇岛分校,河北秦皇岛,066004刊名:仪器仪表学报英文刊名:CHINESE JOURNAL OF SCIENTIFIC INSTRUMENT年,卷(期):2003,24(z1)被引用次数:16次1.王创社开关电源两种控制模式的分析与比较 1998(03)2.李峻开关集成稳压器控制器的原理及应用 19973.F C Lee;Z.D.Fang Optimal Design Strategy of Switching Converters Employing Current Injected control 1985(07)1.包伯成.许建平.刘中.BAO Bo-cheng.XU Jian-ping.LIU Zhong开关DC-DC变换器斜坡补偿的稳定性控制研究[期刊论文]-电子科技大学学报2008,37(3)2.杨汝峰值电流控制模式中斜坡补偿电路的设计[期刊论文]-电力电子技术2001,35(3)3.徐静平.王虎.钟德刚.谭亚伟.Xu Jingping.Wang Hu.Zhong Degang.Tan Yawei一种用于PWM变换器的斜坡补偿电路设计[期刊论文]-华中科技大学学报(自然科学版)2007,35(9)4.刘树林.刘健.钟久明.LIU Shu-lin.LIU Jian.ZHONG Jiu-ming峰值电流控制变换器斜坡补偿电路的优化设计[期刊论文]-电力电子技术2005,39(5)5.夏泽中.李远正.陶小鹏.XIA Ze-zhong.LI Yuan-zheng.TAO Xiao-peng峰值电流模式斜坡补偿电路研究[期刊论文]-电力电子技术2008,42(12)6.孟进.马伟明.张磊.潘启军.赵治华.Meng Jin.Ma Weiming.Zhang Lei.Pan Qijun.Zhao Zhihua带整流桥输入级的开关电源差模干扰特性[期刊论文]-电工技术学报2006,21(8)1.王瑾.李攀.王进军.刘宁.张强电流模式PWM升压DC-DC变换器斜升波发生器的设计[期刊论文]-现代电子技术2007(17)2.张磊.赵艳雷.王迎春.李广勇反激式开关电源用UC384x芯片的斜坡补偿[期刊论文]-通信电源技术 2011(5)3.胡水根.邹雪城.张兢.孔令荣一种用于Boost DC-DC转换器的新型动态斜坡补偿电路[期刊论文]-计算机与数字工程 2007(10)4.刘树林.刘健.钟久明峰值电流控制变换器斜坡补偿电路的优化设计[期刊论文]-电力电子技术 2005(5)5.董慧芬.刘建英航空用低压大电流功率变换器稳定性分析[期刊论文]-电气技术 2009(4)6.李新.景欣峰值电流控制开关电源的反馈补偿问题研究[期刊论文]-通信电源技术 2008(6)7.吴了.邝继顺.马卓.郭苗苗一种基于开关电容的斜坡产生与求和电路[期刊论文]-仪器仪表学报 2011(1)8.李新.陆婷.景欣提高Buck型DC-DC变换器带载能力的补偿设计[期刊论文]-微电子学 2011(1)9.田锦明.王经卓.曹双贵.胡全斌.董自健.樊纪山峰值电流模式变换器自适应斜坡补偿电路设计[期刊论文]-电子器件 2008(2)10.刘鸿雁.栾孝丰.来新泉一种峰值电流控制模式中电流比较器的设计[期刊论文]-电子测量技术 2008(10)11.李新.孟凡菲.王沦一种随占空比变化的分段线性斜坡补偿电路[期刊论文]-微电子学 2012(5)12.马红波.冯全源一种低功耗、高性能BICMOS DC-DC限流电路的设计[期刊论文]-华中科技大学学报(自然科学版) 2007(z1)13.周素力新型高频开关电源在音响电源中的设计与应用[学位论文]硕士 200514.叶萍双向脉冲变频控制直线电机电源的研究与设计[学位论文]硕士 200715.赵卉电流控制模式单片开关电源的设计[学位论文]硕士 200516.董金莲高压宽幅可调节直流开关电源的研究[学位论文]硕士 2005本文链接:/Periodical_yqyb2003z1039.aspx。
开关电源参数计算详细推导过程
(V =
IN
* D *T
) *F
2
SW
*η
2 * POUT
有: T =
LP
(V =
IN
IN
* D *T
) *F
2
SW
*η
2 *VOUT * I OUT
=
(V
2
IN
* D *T
) *η
2
2 *VOUT * I OUT *
IN
(V =
* D *T
2 *VOUT * I OUT * T
) *η = (V
TSW * I P − P =
1 2 POUT 2 POUT 2 POUT * C * I P− P = + +π * N FSW FSW *η *VIN F *η * (V + V ) * P FSW *η SW OUT F NS FSW * 1 2 POUT * I P − P = FSW * + FSW * FSW FSW *η *VIN F 2 POUT
di VIN V *T ,在关闭之前其值到达最大: I P − P = IN ON = dt LP LP
一个开关周期内传输的能量即输入功率: PIN = 等同: PIN =
1 * LP * I 2 P − P * FSW 2
1 1 * LP * I 2 P − P * 2 T P V *I POUT *100% 推导出 PIN = OUT = OUT OUT η η P IN 1 V *I * LP * I 2 P − P * FSW = OUT OUT 2 η
2
* D ) * T (VIN * D ) * T (V * D ) = = IN V *I 2 * PIN 2 * PIN * FSW 2 * OUT OUT η
3846,斜坡补偿

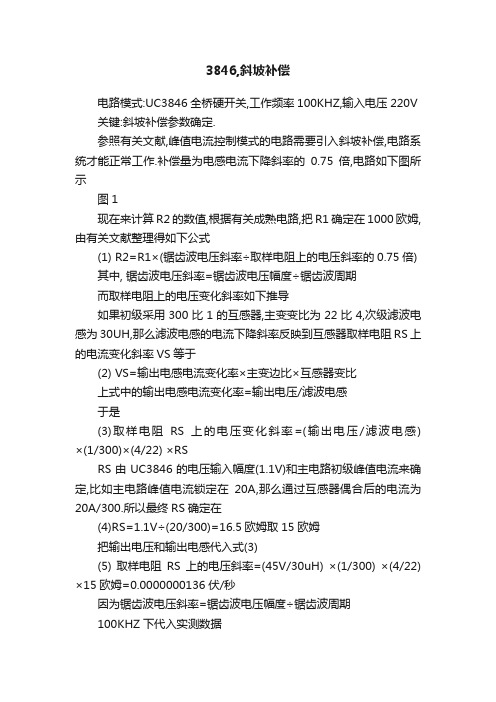
电路模式:UC3846全桥硬开关,工作频率100KHZ,输入电压220V关键:斜坡补偿参数确定.参照有关文献,峰值电流控制模式的电路需要引入斜坡补偿,电路系统才能正常工作.补偿量为电感电流下降斜率的0.75倍,电路如下图所示图1现在来计算R2的数值,根据有关成熟电路,把R1确定在1000欧姆,由有关文献整理得如下公式(1) R2=R1×(锯齿波电压斜率÷取样电阻上的电压斜率的0.75倍)其中, 锯齿波电压斜率=锯齿波电压幅度÷锯齿波周期而取样电阻上的电压变化斜率如下推导如果初级采用300比1的互感器,主变变比为22比4,次级滤波电感为30UH,那么滤波电感的电流下降斜率反映到互感器取样电阻RS上的电流变化斜率VS等于(2) VS=输出电感电流变化率×主变边比×互感器变比上式中的输出电感电流变化率=输出电压/滤波电感于是(3)取样电阻RS上的电压变化斜率=(输出电压/滤波电感) ×(1/300)×(4/22) ×RSRS由UC3846的电压输入幅度(1.1V)和主电路初级峰值电流来确定,比如主电路峰值电流锁定在20A,那么通过互感器偶合后的电流为20A/300.所以最终RS确定在(4)RS=1.1V÷(20/300)=16.5欧姆取15欧姆把输出电压和输出电感代入式(3)(5) 取样电阻RS上的电压斜率=(45V/30uH) ×(1/300) ×(4/22) ×15欧姆=0.0000000136伏/秒因为锯齿波电压斜率=锯齿波电压幅度÷锯齿波周期100KHZ下代入实测数据锯齿波电压斜率=2V/5us=0.0000004伏/秒最后(6) R2=锯齿波电压斜率÷取样电阻上的电压斜率的0.75倍×R1= 4×0.0000001÷(0.0000000136×0.75)×1000=40K最终还有个滤波电容C2的选取,选小了,系统容易受干扰而工作不正常,选大了系统反映迟钝.一般选锯齿波震荡周期的1/50以下.于是(7) C2小于或等于TON/50R1=5us÷(50×1000)=1000PF计算结束,和常规的电路数值都差不多,但是我的实际电路还不稳定,最头疼的是把峰值限制电流调小(调1脚电位)的时候看到输出波形不是变占空比,而是频率和占空比都降低了,我期待的短路的时候占空比不变频率而把脉宽收到最小的状态并不出现.希望高手指点迷津.。
斜坡补偿电路原理
斜坡补偿电路原理你看啊,在电源电路里呢,有个叫电流模式控制的方法。
这就像是一个小管家,要管着电路里电流的事儿。
可是呢,这个小管家有时候也会遇到麻烦。
比如说,当占空比(这就像是电流工作的时间比例啦)变得比较大的时候,电路就会开始捣乱,它会出现一种不稳定的情况,就像小朋友闹脾气一样。
那怎么办呢?这时候斜坡补偿电路就闪亮登场啦。
斜坡补偿电路就像是一个超级英雄,来拯救这个不稳定的局面。
想象一下,电路里的电流或者电压信号就像一座座小山包。
正常情况下呢,这些小山包按照一定的规律排列着,电路就稳稳当当的。
但是当占空比变大的时候,这些小山包就开始变得歪歪扭扭,电路就跟着不稳定啦。
斜坡补偿电路呢,它会给这些小山包添加一些特殊的“泥土”,让小山包重新变得规规矩矩的。
具体来说哦,斜坡补偿电路会产生一个斜坡信号。
这个斜坡信号就像是一把神奇的小铲子,把那些不整齐的小山包重新塑形。
这个斜坡信号会和原来电路里的信号混合在一起。
比如说,原来的信号是往上冲得太猛了,斜坡信号就像一个温柔的力量,拉着它,让它慢慢上升,而不是一下子就冲到天上去。
你可以把原来的电路信号想象成一个调皮的小猴子,总是上蹿下跳的。
斜坡补偿电路产生的信号呢,就像是小猴子的妈妈,牵着它,让它稳稳地走路。
这样一来,电路就不会因为电流或者电压信号的乱跳而不稳定啦。
再从数学的角度看一丢丢哈。
在没有斜坡补偿的时候,电路的一些计算就像是在走钢丝,很容易出错。
一旦加上了斜坡补偿,就像是给走钢丝的人加上了安全绳。
它改变了电路的一些数学关系,让那些原本可能会导致电路混乱的计算变得合理起来。
而且哦,斜坡补偿电路的这个斜坡信号可不是随便乱加的。
它的斜率是经过精心设计的。
就像裁缝做衣服,每一针每一线都得恰到好处。
如果斜率太大了,就像给小猴子的妈妈太大的力气,会把小猴子拉得太狠,电路又会出现新的问题。
要是斜率太小呢,就像妈妈根本拉不住小猴子,电路还是不稳定。
在实际的电路中,斜坡补偿电路的实现方式也是多种多样的。
3846,斜坡补偿
3846,斜坡补偿电路模式:UC3846全桥硬开关,工作频率100KHZ,输入电压220V 关键:斜坡补偿参数确定.参照有关文献,峰值电流控制模式的电路需要引入斜坡补偿,电路系统才能正常工作.补偿量为电感电流下降斜率的0.75倍,电路如下图所示图1现在来计算R2的数值,根据有关成熟电路,把R1确定在1000欧姆,由有关文献整理得如下公式(1) R2=R1×(锯齿波电压斜率÷取样电阻上的电压斜率的0.75倍)其中, 锯齿波电压斜率=锯齿波电压幅度÷锯齿波周期而取样电阻上的电压变化斜率如下推导如果初级采用300比1的互感器,主变变比为22比4,次级滤波电感为30UH,那么滤波电感的电流下降斜率反映到互感器取样电阻RS上的电流变化斜率VS等于(2) VS=输出电感电流变化率×主变边比×互感器变比上式中的输出电感电流变化率=输出电压/滤波电感于是(3)取样电阻RS上的电压变化斜率=(输出电压/滤波电感) ×(1/300)×(4/22) ×RSRS由UC3846的电压输入幅度(1.1V)和主电路初级峰值电流来确定,比如主电路峰值电流锁定在20A,那么通过互感器偶合后的电流为20A/300.所以最终RS确定在(4)RS=1.1V÷(20/300)=16.5欧姆取15欧姆把输出电压和输出电感代入式(3)(5) 取样电阻RS上的电压斜率=(45V/30uH) ×(1/300) ×(4/22) ×15欧姆=0.0000000136伏/秒因为锯齿波电压斜率=锯齿波电压幅度÷锯齿波周期100KHZ下代入实测数据锯齿波电压斜率=2V/5us=0.0000004伏/秒最后(6) R2=锯齿波电压斜率÷取样电阻上的电压斜率的0.75倍×R1= 4×0.0000001÷(0.0000000136×0.75)×1000=40K最终还有个滤波电容C2的选取,选小了,系统容易受干扰而工作不正常,选大了系统反映迟钝.一般选锯齿波震荡周期的1/50以下.于是(7) C2小于或等于TON/50R1=5us÷(50×1000)=1000PF计算结束,和常规的电路数值都差不多,但是我的实际电路还不稳定,最头疼的是把峰值限制电流调小(调1脚电位)的时候看到输出波形不是变占空比,而是频率和占空比都降低了,我期待的短路的时候占空比不变频率而把脉宽收到最小的状态并不出现.希望高手指点迷津.。
斜坡补偿原理
斜坡补偿原理斜坡补偿原理是一种应用于矢量控制器的高级控制技术,它可以提高控制器的精确性和响应速度。
相比于传统的伺服控制,斜坡补偿原理可以使矢量控制的运行更加稳健、精确,并且可以提高系统的转矩和加速度性能。
斜坡补偿原理是一种可以改善矢量控制器性能的有效技术。
斜坡补偿原理根据变频器输出频率和电机转矩反馈的参数,以补偿电机实际运行状态中的不稳定现象,从而提高电机运转精度。
斜坡补偿原理一般应用于高精度控制系统中,如同步电机、换流器控制等。
斜坡补偿原理的基本原理是使变频器的输出对转矩的反应更加迅速,以更好地补偿电机负载的变化。
斜坡补偿原理通过连续监测变频器输出频率与电机转矩反馈的参数,当出现不稳定现象时,通过增加变频器的输出值来使负载加大,以形成一个斜坡模式。
这种模式可以有效地改善电机的转矩和加速度性能,使电机的性能达到最佳。
斜坡补偿原理的典型应用是调节电机转速和方向,以及调节矢量控制系统的电流比例和频率。
斜坡补偿原理可以有效改善电机的运转性能,减少电流抖动现象。
同时,斜坡补偿原理可以降低电机的工作温度,改善电机的寿命和可靠性。
斜坡补偿原理是现在矢量控制器中应用比较广泛的一种技术,它可以有效改善控制器的精确性、响应速度和电机的转矩和加速度性能,为用户提供更加优质的产品。
斜坡补偿原理的实施需要充分的理论研究和实验来证明它的作用,因此,研究和熟练应用斜坡补偿原理是控制工程师必备的技能之一。
总之,斜坡补偿原理是一种可以改善矢量控制器性能的有效技术,它可以使矢量控制的运行更加稳健、精确,并且可以提高系统的转矩和加速度性能,为用户提供更加优质的产品,因此,研究和熟练应用斜坡补偿原理是控制工程师必备的技能之一。
开关电源驱动信号斜率补偿技术的研究
开关电源驱动信号斜率补偿技术的研究摘要:对电流型PWM控制器的扰动来源进行分析,给出了解决办法和几种比较实用的斜率补偿电路,如控制电压补偿方式和电流补偿方式,对改善开关电源驱动信号稳定性有很好的效果。
最后给出了一种电流环补偿电路实例予以验证。
关键词:开关电源;斜率补偿;驱动信号0 引言开关电源以其高效率、小体积等优点获得了广泛的应用。
近年电流型PWM技术得到了飞速发展。
相比电压型PWM,电流型PWM具有更好的电压调整率和负载调整率,系统的稳定性和动态特性也得到明显的改善。
与电压型PWM比较,电流型PWM控制在保留了输出电压反馈控制外,又增加了一个电流反馈环节,给环路调试带来了一定困难。
这种困难不仅仅是由双环反馈带来的,还要考虑通过电流环引入的谐波干扰。
另外,电流采样信号通常来自于变压器原边,有比较大的开关噪声,特别是对于大功率模块会对环路的稳定性有很大的影响。
电流模式变换器工作在占空比大于50%和连续电感电流的条件下,会产生谐波振荡,这种不稳定性与稳压器的闭环特性无关。
既然是独立于系统环路之外的扰动信号,就可以在保证系统环路稳定并具有一定的系统裕量的前提下,对电流环扰动单独处理。
斜率补偿是比较常用的方法,现将其基本的补偿原理以及实际工作中使用的几种典型电路加以分析整理。
1 谐波振荡产生的原因在t0时刻,开关管导通,使电感电流以斜率m1上升,该斜率是输入电压除以变压器原边电感的函数。
t1时刻,电流取样输入达到由控制电压建立的门限,开关管关断,电流以斜率m2下降,直到下一个振荡周期开始。
如果此时有一个扰动加到控制电压上,产生一个小的,就会出现不稳定情况。
在一个固定的振荡周期内,电流衰减时间减少,最小电流在开关接通时刻(t2)上升了。
接下来电感最小电流在会下一个周期(t3)减小至。
在每一个后续周期,该扰动被m2m1相乘,在开关接通时交替增加和减小电感电流,要经过几个振荡周期电感电流减为零,使过程重新开始。
斜坡补偿计算

斜坡补偿计算
斜坡补偿是一种在电流上叠加一个固定斜坡信号的技术,主要应用在电路设计中,以提高电流内环的相位裕度,增加系统的稳定性。
斜坡补偿的计算涉及到多个参数和公式,以下是一些关键的计算步骤和考虑因素:
1.斜坡补偿斜率与电流内环相位裕度的关系:斜坡补偿的斜率(Mc)与电流内环的相位裕度(PM)
之间存在关系,可以通过公式Mc = (1 - 1/D + 1/(2D * cos(PM))) * (Vo/L)来计算,其中D是占空比,Vo是输出电压,L是电感。
这个公式说明,增大斜坡电流可以提高电流内环的相位裕度,从而增强系统的稳定性。
2.斜坡补偿的斜率选择:在实际应用中,斜坡补偿的斜率通常选择为Mc = 0.75M2,其中M2是电感
电流的下降斜率。
这个选择是为了给电路设计留下一定的裕度,保证系统的稳定性。
3.占空比的影响:占空比D对斜坡补偿的效果有重要影响。
当占空比接近0.5时,即使没有斜坡补
偿,也可能出现次谐波振荡。
因此,在占空比小于0.5时也需要进行一定的斜坡补偿。
4.重力补偿算法的应用:在机器人等设备的斜坡行走中,还需要考虑重力补偿算法。
通过测量俯仰
角和翻滚角,可以计算出沿着斜坡方向的重力分量,并通过补偿力来平衡这个重力分量,从而实现稳定行走。
需要注意的是,斜坡补偿的计算涉及到多个参数和公式,需要根据具体的应用场景和电路设计来进行调整和优化。
同时,重力补偿算法的实现也需要根据具体的设备和应用场景来进行设计和实现。
斜坡补偿原理

斜坡补偿原理
斜坡补偿原理是数字电路技术的一项重要原理,它主要是为了解决输入信号的随机性和变化特性,采用一定的算法和系统,精确补偿信号的偏差和失真,使其符合特定频率和标准要求。
斜坡补偿原理一般用于数字信号处理中,比如音频效果增强,图像增强等等。
它的基本原理是:通过网络系统,将数字信号转换成数学模型,然后计算出该信号的偏移量,并采用斜坡补偿算法来改变模型偏移量,最后通过计算出的偏移量补偿信号,使其大致符合理想的频率范围或者其他要求。
斜坡补偿原理的完成过程可以分为三个主要部分:信号采集,信号建模和斜坡补偿系统。
首先,需要从物理信号中采集有效信息,这里主要是利用数字传感器将物理数据转换成二进制形式,如温度、湿度等,其次,将这些二进制数据模型化,这里一般采用正交分量分析(PCA)、主动模型校正(AMC)等方法将信号转换成数学模型,最后,利用斜坡补偿算法来补偿模型的偏移量,使信号得以恢复到用户设定的频率、标准等要求。
斜坡补偿原理最大的优点在于采用了一种灵活高效的算法,能够自动适应环境变化,从而提升数据处理的准确性和鲁棒性,使系统可以有效地抵抗外部干扰,同时提升数据处理的效率。
但是,它也有一定的缺点,比如需要很多的硬件成本,耗时也比较长,而且在特定的环境下斜坡补偿性能可能受到影响。
综上所述,斜坡补偿原理是一种技术模型,它可以根据环境变
化自动调整输入信号,从而提高系统的准确性和鲁棒性,使其具备自动补偿失真的功能,在一定程度上维持信号的稳定性。
它实际上是一种高效的信号处理技术,在数字领域有着广泛的应用,比如科技产品、消费类电器、数据处理系统等等。
斜坡补偿原理

斜坡补偿原理
斜坡补偿原理是随电路和控制系统不断发展而出现的一种重要的新原理,它也是数字技术日益重要的一个组成部分。
那么,斜坡补偿原理究竟是什么?斜坡补偿原理是指在电路中,如果接收的电路给定的信号有一定的斜坡,则可以利用某种方式来抵消这种斜坡,以达到所需的输出信号。
斜坡补偿原理可以应用到各种各样的电路及控制系统中。
下面介绍斜坡补偿原理。
首先,斜坡补偿即为找到电路及控制系统中被斜坡所影响的各种参数,然后根据这些参数考虑到斜坡的影响,从而调整系统的控制参数,使达到更好的效能和更好的控制效果。
其次,斜坡补偿原理中需要考虑以下几个关键因素:首先是斜坡的参数,斜坡参数可以包括净斜坡、正斜坡或负斜坡;其次,斜坡补偿中需要注意控制参数,如控制数据、反馈、比例、积分;最后是系统参数,系统参数可以包括负载、温度和其他电路参数。
斜坡补偿原理在保证达到精确稳定的控制效果的同时也节省了大量的费用,因此,目前斜坡补偿原理已经得到了广泛的应用,尤其是在科学实验中,更是表现出了它的优越性。
斜坡补偿原理对实时系统控制有着重要的作用,未来,斜坡补偿原理将会进一步得到完善,从而使它在自动化、仪器仪表等领域的应用更加广泛。
斜坡补偿原理也可以在机器人控制及机械控制等领域得到广泛
的应用,能够有效地改善机器人运动的精确度和稳定性,使其能够实现对高精度的调节、控制,以及对复杂工况的控制。
可以说,斜坡补偿原理给各种电路及控制系统的发展带来了极大的便利,它已经成为数字技术发展过程中不可或缺的一个组成部分,未来,随着科学技术的进步,斜坡补偿原理将会得到更加深入的研究和更广泛的应用。
dcdc斜坡补偿原理
dcdc斜坡补偿原理DC-DC斜坡补偿原理一、概述DC-DC斜坡补偿原理是一种在直流-直流转换器中使用的补偿技术,旨在提高转换器的动态响应和稳定性。
该原理通过改变转换器的控制信号斜坡来实现电流和电压的平稳过渡,从而减小输出纹波和提高转换效率。
二、DC-DC转换器的工作原理DC-DC转换器是一种电子器件,用于将直流电压转换为另一种直流电压。
其基本工作原理是通过控制开关管的导通和截止时间来改变输入电压的平均值,并通过电感和电容来实现电流和电压的平滑。
三、DC-DC斜坡补偿原理的应用斜坡补偿原理广泛应用于各种类型的DC-DC转换器中,包括降压型、升压型和反激型转换器。
它可以改善转换器的动态性能,提高输出电压的精度和稳定性。
四、斜坡补偿的原理斜坡补偿原理的基本思想是通过改变控制信号的斜坡来控制开关管的导通和截止时间,从而实现电流和电压的平稳过渡。
斜坡补偿技术通过使开关管的导通和截止时间渐变,减小了开关管的切换过程中的电流和电压冲击,从而降低了输出纹波和噪声。
五、斜坡补偿的实现方法1. 硬件实现:通过改变控制电压的上升和下降斜率,可以实现斜坡补偿。
这需要在电路中添加一个斜坡产生电路来控制控制信号的斜率。
2. 软件实现:通过在控制器中编程控制信号的斜率,可以实现斜坡补偿。
这种方法通常需要使用微处理器或数字信号处理器来实现。
六、斜坡补偿的优势1. 提高转换器的动态响应:斜坡补偿技术可以减小开关管的切换过程中的电流和电压冲击,从而提高转换器的动态响应能力。
2. 减小输出纹波:斜坡补偿技术可以平滑输出电流和电压的过渡过程,减小输出纹波和噪声。
3. 提高转换效率:通过减小开关管的切换过程中的电流和电压冲击,斜坡补偿技术可以提高转换器的效率。
七、斜坡补偿的局限性1. 需要额外的硬件或软件支持:实现斜坡补偿需要在电路中添加斜坡产生电路或使用专门的控制器,增加了系统的复杂性和成本。
2. 对设计要求较高:斜坡补偿的效果受到斜坡的斜率和补偿时间的影响,需要进行精确的设计和调试。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
详解开关电源斜坡补偿的推导过程
我们首先假设,(BUCK电路为例)电感的电流波形以斜率m1上升,然后以斜率m2下降,在电感的电流达到峰值电流的时候限值电压(顶上的电
压横线)突然受到一个干扰时间为Δt,幅值为+ΔV的干扰后(限值电压升高),电感峰值电流达到原本的峰值电流后在Δt时间内继续上升,上升的电流幅值为ΔI,随后干扰消失,电感电流以m2的斜率下降,大致如下图,下面来
计算一下受到干扰后电流波形与原本的电流轨迹的差值ΔI1,ΔI2......ΔIn,是
越来越大还是越来越小,越大则不稳定,越小则稳定。
上图中虚线为受到干扰后的波形,实线为原本的波形轨迹
我们把实线的第一个峰值电流记做i1
我们把虚线的第一个峰值电流记做i1_1
i1_1 - i1=ΔI
我们把实线的第二个峰值电流记做i2
我们把虚线的第二个峰值电流记做i2_1
有
i2=i2_1 i1=in_1
然后我们把时间点t1垂直建立一个坐标系,设时间轴t上的点t1为原点
可以看出i1以m2的斜率下降了时间toff,i1_1以m2的斜率下降了时间toff-Δt,可得出结论i1和i1_1下降到时间点t2后,i1_1比i1少下降了时间
Δt
则i1_1比i1降低的电流为Δt·m2
由于原来i1_1比i1就高出了ΔI i1_1 - i1=ΔI。