微波超视距雷达对海面舰船目标距离的探测
船用雷达 详细介绍

4.磁控管的检查:
万用表欧姆档测灯丝阻值:其阻值接近于0(几个欧姆)正常 兆欧表检查阳阴极之间绝缘电阻:其值应大于200
5.使用注意事项
1)阴极充分预热3~5分钟,暂时不用只关高压 2)保护磁性,严禁敲打,铁磁物相距大于10 cm 3)防高压触电,防电磁辐射,带电检查需两人在场 4)波导天线连接要良好且水密防变形,禁拆波导开高压 5)新管或长期不用(大于6个月 )的使用前应进行老练,
实际波形:
1)越接近矩形,能量越大,
tt: 前沿上升时间
0.1~0.2τ tf: 后沿下降时间
0.2~0.4τ Δu: 顶部波动值
2~5%
作用距离越远 2)前沿越陡,测距精度越高
3)后沿越陡,距离分辨力 越高
4)顶部越平坦,发射功率和 频率越稳定
第一节 雷达发射机(Transmitter)
三、磁控管振荡器
第二节 雷达的基本组成、作用
5、接收机:超外差式,将微弱回波信号放大千万倍以符合
显示器要求。
V 几十V
6、显示器:平面位置显示器(PPI)。显示与测量目标,目标 回波按目标的实际距离和方位显示在荧光屏上; 且配有测量系统供随时测量。
7、雷达电源:把船电变成雷达所需的中频交流电。 400 ~ 2000 Hz
随量程改变:近量程,高F;远量程,低F
4.发射功率:指峰值功率,一般3~75 kW
1)峰值功率 pt: 在脉冲持续时间内的平均功率 2)平均功率 Pm: 一个脉冲重复周期内输出功率的平均值
R max
p =p t m tT
p↑→
杂波
天线旁瓣干扰
5.脉冲波形:发射脉冲的包络
故障
理想脉冲: 矩形
波形:
微波超视距雷达原理

微波超视距雷达原理一、引言微波超视距雷达是一种广泛应用于军事和民用领域的雷达系统,它利用微波信号进行目标探测和跟踪。
本文将介绍微波超视距雷达的原理和工作过程。
二、微波超视距雷达的原理微波超视距雷达是一种利用微波信号进行目标探测和跟踪的雷达系统。
其原理基于微波信号的传播特性和目标散射信号的特征。
1. 微波信号的传播特性微波信号具有较高的频率和较短的波长,能够在大气中传播较远的距离。
微波信号的传播损耗较小,能够穿透一定厚度的云层和大气层,适合用于远距离目标探测。
2. 目标散射信号的特征目标散射信号是目标表面反射回来的微波信号。
目标散射信号的强度和目标的形状、大小、材料特性等因素有关。
微波超视距雷达通过接收和分析目标散射信号,可以获取目标的位置、速度、距离等信息。
三、微波超视距雷达的工作过程微波超视距雷达的工作过程可以分为发射、接收和信号处理三个步骤。
1. 发射微波超视距雷达通过发射天线向目标发送微波信号。
发射天线通常会采用定向天线,以集中发射信号的能量,增加信号的强度和距离。
2. 接收微波超视距雷达通过接收天线接收目标散射回来的微波信号。
接收天线通常会采用定向天线,以增强对目标散射信号的接收能力。
3. 信号处理微波超视距雷达通过对接收到的目标散射信号进行分析和处理,提取目标的特征信息。
信号处理的方法包括滤波、放大、频谱分析等。
四、微波超视距雷达的应用微波超视距雷达广泛应用于军事和民用领域,具有以下几个方面的应用:1. 军事侦察微波超视距雷达可以用于军事侦察,实时监测敌方目标的位置、速度和距离等信息。
通过微波超视距雷达的应用,可以提供军事指挥部门的战场态势判断,为军事行动提供依据。
2. 空中交通管理微波超视距雷达可以用于空中交通管理,实时监测飞机的位置和速度等信息。
通过微波超视距雷达的应用,可以提供飞行控制中心的空中交通监控,确保飞机的安全飞行。
3. 气象预警微波超视距雷达可以用于气象预警,实时监测天气变化和气象灾害等情况。
激光雷达在海上边防中的船只识别应用

激光雷达在海上边防中的船只识别应用近年来,随着科技的不断发展,激光雷达作为一种高精度、高分辨率的探测技术,被广泛应用于海上边防领域。
其在船只识别方面的应用,为海上边防工作提供了更为可靠和高效的手段。
一直以来,海上边防对于船只的识别与监测一直是一项重要任务。
传统的船只识别方式主要依靠人工观察和雷达技术,然而由于人工观察的主观性和雷达技术的限制,往往无法满足边防工作的需求。
而激光雷达作为一种主动式探测方式,能够通过发送激光束并接收目标回波数据,实现对船只的高精度识别。
激光雷达在船只识别中的应用主要体现在以下几个方面。
首先,激光雷达可以实现对船只的三维定位和目标检测。
通过将激光束发射到船只上并接收回波数据,系统可以计算出船只的准确位置和形态,实现对船只的精准追踪和识别。
其次,激光雷达还可以实现对船只的尺寸、速度等参数的测量。
例如,通过分析激光束发射到船只上的回波数据,可以获得船只的长度、宽度等信息,进而判断其类型和用途。
同时,激光雷达还可以通过计算回波数据的多普勒频移,得到船只的速度信息,为边防工作提供更多实时数据支持。
最后,激光雷达还可以应用于船只的行为识别和目标跟踪。
通过分析船只在海上的运动轨迹和行为特征,可以对其进行智能识别和预警,从而有效提升边防工作的准确性和效率。
然而,在实际应用中,激光雷达在海上边防中的船只识别也存在一定的挑战和限制。
首先,激光雷达的工作性能受到天气条件和海洋环境的影响。
例如,在恶劣的天气下或海洋波浪较大的情况下,激光束可能无法正常穿透和接收目标回波,影响识别效果。
其次,激光雷达在长距离识别方面还有一定的技术难题。
由于激光束的传播特性,其在远距离处的分辨率和能量损耗会逐渐增大,限制了激光雷达对远距离船只的准确识别能力。
因此,未来的研究可以集中在改进激光雷达的工作性能和技术,提高其在海上边防中的应用效果。
总的来说,激光雷达在海上边防中的船只识别应用具有广阔的前景和重要的意义。
大气波导效应对雷达探测的影响分析

M =N+h a×1 / 0 ( 4)
() 3
式中 , h为距地面的高度 , a为地球半径。取 a为 6 7 k 则有 3 1m, M =N+ .5 h ( ) 0 17 5 对上式求导 , 则有
d M
3 2大气波导使电磁 波能量衰减 .
大 2 3 。伴随着超视距 的出现 , — 倍 雷达杂波也会增强 , 增加 雷达测量 的 误差 , 对雷达的探测产生很 大影 响。因此 , 开展大气 波导情况下对 雷达 探测性能影响 的研究变得十分重要 。
2大 气 波 导效 应
2 1大气波导成 因 . 对流层 的底层大气 , 尤其是海面上低空 大气的温度 、 湿度 的急 剧变 化, 经常会使某一 高度范 围内大气折射 率随高度 的变化梯度显著超过 正 常值 , 导致在其间传播 的雷达 电磁 波信号脱离 正常的视线 传播轨道 , 在
【 关键词】 大气波导
雷达探 测
影响
中图分类号 :N 5 文献标识码 : 文章编号 :0 9—4 6 2 1 )3一 l3一 2 T9 A 10 07(0 0 0 O l O
1引言
海面环境异常 的复杂 , 载雷达在对海 面 目标 进行探测时 , 舰 地物 杂 波、 海浪杂波、 气象杂波以及在在大气传播过程 中会存在的折射 、 多路径 效应等 , 都会对探测造 成一定 的影 响。尤 其是 在大气 层 出现波导 现象 时, 电磁波发生超折射 , 使舰 载雷达 出现超视距探测 , 雷达探 测范围能增
间对舰船 目标进行了超视距探测 。 最大跟踪至 lO r Ok a以上 。
j }: ^
N= l + l , 2 、 P I()
天波超视距雷达舰船目标检测特点及难点分析

第34卷第5期2020年10月空军预警学院学报Journal of Air Force Early Warning AcademyV ol.34No.5Oct.2020收稿日期:2020-07-29作者简介:崔晓梦(1983-),女,讲师,博士,主要从事雷达通信一体化技术研究.天波超视距雷达舰船目标检测特点及难点分析崔晓梦1,严韬1,段广青2(1.空军预警学院,武汉430019;2.武警士官学校,杭州310000)摘要:为研究天波超视距雷达(OTHR)舰船目标检测问题,系统分析了目标特性、高频海杂波特性、电离层特性和干扰噪声特性,在此基础上讨论了OTHR 舰船目标检测的特点和难点,并结合计算机仿真给出了相应的结论.本文工作为后续研究OTHR 舰船目标检测方法提供了理论基础.关键词:天波超视距雷达;舰船目标检测;海杂波;电离层;相干积累时间中图分类号:TN958文献标识码:A文章编号:2095-5839(2020)05-0340-06随着海上武器平台和远洋航运的飞速发展,海面舰船目标监视受到世界各国的高度重视.天波超视距雷达(OTHR)工作在高频频段(3~30MHz),利用大气电离层对高频电磁波的折射弯曲自上而下观察空中及海面目标,具有大范围、远距离、抗隐身、抗低空等优良的目标探测性能,在战略防空、反导预警、对海监视等方面具有突出作用[1].利用OTHR 不仅可以对广阔海域内航空母舰战斗群以及各类大中型舰船目标进行监视,还能提供飞机、巡航导弹和弹道导弹等威胁目标的早期预警,是有效掌握制空/海权,应对战略打击的重要手段,具有极其广阔的应用前景.OTHR 目标检测采用多普勒域检测机制,相较于飞机和导弹2类快速运动的空中目标,舰船目标具有运动速度慢、多普勒频率低的特性.OTHR 舰船目标的检测背景为强大且复杂的海杂波,文献[2]通过实测数据分析了高频海杂波的多普勒分布特性和回波幅度特性,其结果表明海杂波在多普勒域表现为一段连续的多普勒谱,其中一阶海杂波表现为2个较窄的谱峰,二阶及高阶海杂波表现为一段具有多个尖峰但幅度低于一阶海杂波的连续谱.文献[3]运用电磁场理论推导了一阶和二阶海杂波散射截面积方程,从数学角度定量描述了高频海杂波多普勒谱.文献[4]基于归一化函数理论对高频海杂波多普勒谱模型进行了研究完善,使之更加契合OTHR 实测海杂波情况.文献[5]从OTHR 舰船目标的探测原理出发简要分析了OTHR 探测舰船目标的难点,文献[6]研究了不同风速条件下海杂波对高频雷达检测舰船目标的影响,并运用多普勒盲区(DBZ)来直观刻画OTHR 舰船检测性能.文献[7]将电离层引入海杂波模型,进一步研究了海态和电离层对OTHR 舰船检测的影响.同时,OTHR 工作的高频频带内还存在大量的外部干扰和噪声,限制了雷达工作参数的选择和接收机灵敏度[8-9],也给OTHR 舰船目标检测带来严重影响.因此,对于OTHR 目标检测,相对于噪声背景下的机动目标检测,海杂波背景下的舰船目标检测更加困难.现有的OTHR 舰船检测问题研究分析仅针对特定问题展开,缺乏一定的系统性,为此本文基于OTHR 舰船目标检测问题,系统研究分析与之密切相关的目标特性和环境特性(海杂波特性、电离层特性、干扰噪声特性),为后续研究OTHR 舰船目标检测方法奠定理论基础.1特性分析1.1舰船目标特性分析舰船目标作为基本探测对象,首先对其特性进行分析,主要包括雷达横截面积(RCS)特性和多普勒特性2个方面.1)RCS 特性理论上讲,舰船目标RCS 与雷达入射电磁波的频率、入射角,天线极化方式以及目标自身结构(包括形状、大小、吨位、材料等)紧密相关,而OTHR 工作在高频频段,大多数舰船目标的几何尺寸都处在散射能量的谐振区.本文采用海面目标RCS 的近似估计方法[10]来估计OTHR 舰船目标的RCS 值,通过估算得到中型、大型舰船的RCS 典型值分别约为30dBm 2和50dBm 2.DOI:10.3969/j.issn.2095-5839.2020.05.006第5期崔晓梦,等:天波超视距雷达舰船目标检测特点及难点分析3412)多普勒特性由多普勒频率的定义,可得f d =±2vr/λ=±2vλ-1cosθ(1)式中,vr为目标相对于雷达的相对速度,λ为雷达发射波长,v为目标的绝对速度,θ为目标运动方向和雷达波束的夹角,“±”表示目标背离或朝向雷达波束方向.由式(1)可以看出,舰船目标的多普勒频率与自身运动速度、方向以及雷达波长有关.与常规微波雷达的舰船检测相比,OTHR的波长较长,因此相同速度的舰船目标在OTHR中的回波多普勒频率要远小于微波雷达情形;与OTHR机动目标检测相比,舰船目标运动速度较慢,其回波多普勒频率远小于机动目标.因此,OTHR背景下的舰船目标属于低多普勒目标.1.2高频海杂波特性分析1)高频海杂波产生机理及多普勒特性依据布拉格散射理论[2],海浪的运动可以表示为具有不同振幅、相位、频率和运动方向的随机过程的叠加,这些随机过程近似呈正弦波动.当海浪相邻波峰反射的无线电波产生后向谐振散射,使得各次回波信号同相位相加,从而产生一阶海杂波[3],对应的多普勒频率可以表示为f b =±2vpλ-1cosβ=±v/Lc»±0.102(fcosβ)1/2(2)式中,vp表示海浪的相位传播速度,β为海浪与雷达照射方向的夹角,Lc 表示波浪长度,f为雷达工作频率(单位为MHz),“±”号表示朝向和背离雷达波束的谐振海浪所产生的正负Bragg 峰.由式(2)可以计算得到,当雷达发射频率取5~30MHz时,一阶Bragg峰的多普勒频率为0.2281~0.5587Hz(假设夹角β=0°).高频无线电波不仅与海浪存在一阶作用,产生一阶Bragg峰,同时还与海浪存在高阶作用,产生二阶及高阶海杂波.二阶及高阶海杂波分布在正负一阶Bragg峰附近,强度比一阶海杂波要弱,通常可用噪声近似代替.2)高频海杂波RCS特性高频雷达海杂波RCS计算的典型模型主要有Barrick模型[3]和Walsh模型[4].由于Barrick模型可以看作是Walsh模型的近似,所以Walsh模型近年来被广泛应用.依据Walsh模型,高频海杂波RCS的计算表达式[4]为σc =σρpDφDρsecβ(3)式中,σ0=σ1+σ2为一阶和二阶后向散射系数之和,ρp为目标与OTHR接收阵列的射线距离,Dφ和Dρ分别表示雷达的方位与距离分辨单元.海面一阶后向散射系数σ1可表示为σ1(ωd)=16πk2Dρåm=±1S1(m k)k2.5g-1/2Sa2[Dρ(k-2k)/2](4)式中,ωd为多普勒角频率;k0为雷达入射波波数;Δρ为散射区长度;g为重力加速度;Sa(×)为sinc函数;S1(k)为海面重力波方向谱,k为波数为k的有向海表面波矢量,即k=|k|,当k=2k时产生一阶Bragg峰;m=±1分别表示正(m=1)负(m=-1)多普勒频率.二阶后向散射系数σ2可表示为σ2(ωd)=8πk2Dρåm1=±1åm2=±10¥ -ππ 0¥S1(m1k1)S1(m2k2)×ϒ2k2δ(ωd+m1(k1g)1/2+m2(k2g)1/2)×Sa2[Dρ(k-2k)/2]k1d k1dθk1d k(5)式中,ϒ为水波之间或水波与电磁波之间的耦合参数;δ(×)为Delta函数;k1和k2分别为2个有向海面重力波矢量,且有k1+k2=k,θk1表示有向海表面波矢量k1的方向角.1.3电离层特性分析1)电离层形态与传播机理电离层是由地球高层大气分子电离产生的自由电子、离子和中性分子等构成的能量较低的准中性等离子体区域.电离层的高度范围大约在60~1000km,根据层高以及电子浓度的不同,电离层可分为D层、E层、F层和上电离层,如图1所示.其中,D层是最低层,也是OTHR电磁波必须穿过的区域,其电子浓度最小;E层可分为稳定E层和突发E层(Es层),其中稳定E层是反射OTHR电磁波的有效区域,但由于Es层的存在,其可覆盖的地面距离范围限制在2000km以内;F层是电离层电子浓度最大的一层,同时也是反射高频电磁波的最高层,F层可分为F1层和F2层,其可覆盖的地面距离分别为2000~3000km和3000~4000km;F2层以上为上电离层,该层不是OTHR的传输信道.12345610km40km90km60km图1电离层高度与电子浓度的关系由电离层传播理论可知,由于电离层的折射率小于1(空气的折射率约为1),所以当电磁波空军预警学院学报2020年342从空气入射到电离层后其折射角会比入射角大.同时,由于电离层介电常数随着高度增加而减小,相应的折射率也随之减小,因此电磁波穿过不同高度的电离层是一个折射角不断增大的过程.设N i 为电离层的第i 个高度,φi 为电离层第i 个高度处的入射角,n i 为电离层的第i 个高度处的电子浓度,多层电离层介质的电磁波折射模型如图2所示(N 1<N 2<×××<N n -1<N n ,n 1>n 2>×××>n n -1>n n ).可以看出,随着折射角的增大,入射到电离层的电磁波射线与水平线逐渐逼近,当入射角φn =90°时,电磁波射线到达最高点并发生全反射.电磁波全反射后将会沿着之前的反过程折射到地面或海面,而后再次由电离层反射回OTHR 接收阵列,完成对监视区域的探测.12N3n图2多层电离层介质的电磁波折射模型2)电离层特性对OTHR 舰船检测的影响电离层是OTHR 必不可少的传输信道,但作为一种自然产生的媒质,除开具备的多层物理结构特性,电离层还具有随机、色散、时变、非均匀、非平稳和各向异性等特点.这些特性限制了OTHR 舰船目标检测性能的提升,主要原因在于电离层对雷达回波谱的污染,表现在以下2个方面.①电离层非平稳特性和非均匀特性易使OTHR 回波发生相位污染[11],分为线性相位污染和非线性相位污染两类,其中,线性相位污染造成回波谱的频移,不改变其多普勒谱结构,即舰船目标回波和海杂波回波一起发生频移,此时仍能有效检测舰船目标,但会给目标的速度估计带来误差;非线性相位污染使得OTHR 回波信号的相干性受到破坏,相干积累效果变差,表现为回波谱展宽,其中海杂波谱的展宽将增大舰船检测的多普勒盲区,对OTHR 舰船目标检测有严重影响.②电离层多层结构特性易使电磁波在发射、散射、接收的过程中同时存在多种传播模式,产生多模传播污染[12].若多模回波经过非主选电离层时发生线性污染,则回波谱出现多个海杂波谱峰,增大了对舰船目标的遮蔽区域;若多模回波发生非线性污染,则多模海杂波谱将严重展宽,形成多模扩展多普勒杂波(SDC),严重影响舰船目标的检测.1.4高频干扰及噪声特性分析OTHR 工作在高频频段,在该频段内存在大量的高频干扰和噪声,主要包括流星余迹干扰、通信干扰、雷达干扰、电台干扰等多种无源或有源干扰以及宇宙噪声、大气噪声等外部噪声,这些外部干扰和噪声通常比OTHR 接收机内部噪声高20~40dB ,影响OTHR 舰船目标的检测性能.高频干扰和噪声对OTHR 舰船检测的影响主要表现在:①限制了OTHR 工作频率及带宽的选择.为了减小空间分辨单元内的海杂波能量,提高舰船目标的信杂比,OTHR 在探测舰船目标时通常采用较大的带宽以提高距离分辨力,但其频段内的高频干扰使得较宽的工作带宽总是难以得到.②降低了舰船目标检测概率.流星余迹干扰、电台通信干扰、雷达干扰等这类瞬态干扰,其强度通常与地/海杂波相当,且持续时间短,只存在部分距离单元,但其在多普勒域呈现出很宽的谱,当舰船目标落入与该类干扰相同的多普勒范围时,目标被掩盖而无法检测.而工业干扰、蓄意人为干扰等这类长干扰,其强度通常也较大,持续时间相对较长,对舰船目标检测的影响表现为掩盖目标回波或形成虚假目标.外噪声在时间和空间上是密布及杂乱无章的宽频谱结构,其功率电平通常比雷达接收机噪声电平高20dB 以上,是限制接收机灵敏度的主要因素.2OTHR 舰船目标检测难点分析根据上面对OTHR 舰船检测的目标与环境特性的分析,从整个雷达系统的角度出发,可以将OTHR 舰船目标检测归纳为如下6个特点:①低可观测性.主要指OTHR 背景下的舰船目标是低信杂比、低多普勒频率的观测目标.②多维性.OTHR 信号处理后得到的检测平面是多维的方位-距离-多普勒谱(ARD 谱),检测将在多维平面进行.③时变性.主要指海杂波和电离层具有时变特性,使杂波谱发生展宽,增大舰船检测的多普勒盲区.④多层性.指的是电离层的多层结构特性,其产生的多模SDC 将严重影响舰船目标检测.⑤复杂性.是指OTHR 面临的复杂电磁环境,影响雷达工作参数的选取和舰船目标检测性能.⑥多源性.主要是OTHR 回波中存在多种信号,包含地杂波、海杂波以及各种干扰和噪声等,需采取有效手段加以区分或抑制.对于海杂波背景下的OTHR 舰船检测,尽管舰船目标相对飞机和导弹具有较大的RCS ,但其运动速度较慢,多普勒频率较低,目标回波易落入海杂波频谱范围,因此其检测性能主要受到信第5期崔晓梦,等:天波超视距雷达舰船目标检测特点及难点分析343杂比(SCR)的限制.根据OTHR 雷达方程,舰船目标回波的信杂比可表示为ρSCR =P t /P c =[P av G t G r T c λ2σt /(R 4(4π)3L s L p )]/[P av G t G r T c λ2σc /(R 4(4π)3L s L p )]=σt /σc(6)式中,P t 和P c 分别为目标和杂波的回波功率,P av 为雷达发射平均功率,G t 和G r 分别为发射与接收天线增益,T c 为相干积累时间,λ为雷达工作波长,σt 和σc 分别为舰船目标和海杂波的RCS ,R 为射线距离,L s 和L p 分别表示设备系统损耗和传播路径损耗.从式(6)可以看出,OTHR 舰船目标的回波SCR 取决于σt 和σc .从舰船目标的探测原理可知,从理论上精确评估OTHR 舰船目标的探测能力是相当困难的,但通过回波信杂比来分析海杂波对舰船检测性能的影响是可行的.由前面分析可知,海杂波回波谱在不同的多普勒频率处的强度不同,因此对应的SCR 也不尽相同,当某多普勒频率f d 处的SCR 满足SCR 大于最低检测门限η时,即可认为该处的舰船目标能够被检测,最低检测门限的典型值η=12dB ;反之,如果该多普勒位置的SCR 小于门限η,则表示该处的舰船目标不能被检测.3仿真实验与分析本文通过对多普勒盲区的仿真来进一步分析OTHR 舰船检测的难点,其中舰船目标的RCS 取30dBm 2、50dBm 22个典型值,分别代表中型和大型舰船目标.设置仿真参数为:雷达工作频率为14.8MHz ,带宽为40kHz ,射线距离为2000km ,方位分辨力为0.5°,风向为30°.3.1海杂波的遮蔽效应对于既定参数的雷达发射系统,海杂波RCS 和海态信息紧密相关,此处以海态信息中的风速参量为例进行分析说明.设风速从4m/s 到20m/s 变化以模拟不同的海态,图3给出了不同风速下的海杂波多普勒谱和相应的目标多普勒盲区.由图3(a)可以看出,随着风速的增加,二阶海杂波的幅度和宽度都随之增大,而一阶海杂波的变化相对较小,这说明风速对二阶海杂波的影响较大.由图3(b)和图3(c)可以看出,当风速较低时,中型和大型舰船目标都仅受到一阶海杂波的遮蔽,以风速等于5m/s 为例(二级海态),中型舰船目标的多普勒盲区为[-0.43,-0.37]Hz 和[0.37,0.42]Hz ,对应的速度盲区为[-4.34,-3.75]m/s 和[3.75,4.26]m/s ;大型舰船目标的多普勒盲区为[-0.41,-0.38]Hz 和[0.38,0.40]Hz ,相应的速度盲区为[-4.16,-3.85]m/s 和[3.85,4.05]m/s .当风速为20m/s 时(七级海态),中型舰船的多普勒盲区为[-0.58,-0.18]Hz 和[0.21,0.54]Hz ,对应的速度盲区为[-5.88,-1.82]m/s 和[2.13,5.47]m/s ;而大型舰船的多普勒盲区为[-0.49,-0.30]Hz 和[0.38,0.40]Hz ,相应的速度盲区为[-4.97,-3.04]m/s 和[3.85,4.05]m/s .综上所述,在低海态情况下,中型舰船目标和大型舰船目标都仅受到一阶海杂波的遮蔽,随着海态等级的增大,海杂波发生扩展,其中尤以二阶海杂波的变化较为显著,对中型舰船目标的检测多普勒盲区也随之扩大,而大型舰船目标只有在很高的海态下其扩展的二阶杂波才会对检测盲区产生影响.需要说明的是,OTHR 的工作频率、带宽、海面风向、风速、洋流等都会对海杂4201816141210860-2-12150403020100-10-20多普勒频率/Hz风速/(m/s)-2-1012468101214161820风速/(m/s)多普勒频率/Hz468101214161820风速/(m/s)-2-1012多普勒频率/Hz(a)海杂波多普勒谱(b)中型舰船多普勒盲区(c)大型舰船多普勒盲区图3不同风速下海杂波多普勒谱和目标多普勒盲区波的RCS 产生影响,此处不再一一列出.3.2电离层污染对海杂波的调制效应本文以非线性相位污染为例进行说明.设风速取8m/s ,相位污染函数用a sin(2π×0.04t )表示,其中a 为相位污染的幅度值,此处a Î(0.5 5).图4给出了不同非线性相位污染幅度下海杂波多普勒谱和相应的目标多普勒检测盲区.由图4可知,a =0.5时,中型舰船多普勒盲区为[-0.56,-0.30]Hz 和[0.32,0.46]Hz ,对应的速度盲区为[-5.68,-3.04]m/s 和[3.24,4.66]m/s ;此时大型舰船的多普勒盲区为[-0.42,-0.36]Hz ,相应的速度盲区为[-4.26,-3.65]m/s .当a =5时,中型舰船的多普勒盲区为[-0.67,-0.11]Hz 和[0.14,0.61]Hz ,对应的速度盲区为[-6.79,-1.11]m/s 和[1.42,6.18]m/s ;空军预警学院学报2020年3440-2-1214030201002.01.00.51.52.53.03.54.04.55.0多普勒频率/Hz相位污染幅度0.51.01.52.02.53.03.54.04.55.00-2-121多普勒频率/Hz相位污染幅度0.51.01.52.02.53.03.54.04.55.0相位污染幅度0-2-121多普勒频率/Hz(a)海杂波多普勒谱(b)中型舰船多普勒盲区(c)大型舰船多普勒盲区图4不同非线性相位污染幅度下海杂波多普勒谱和目标多普勒盲区此时大型舰船的多普勒盲区和相应的速度盲区分别为[-0.54,-0.24]Hz 和[-5.47,-2.43]m/s .因此,当发生电离层非线性污染时,海杂波发生扩展,且随着相位污染幅度的增大其展宽效应也越显著,增大了OTHR 舰船检测的多普勒盲区.3.3相干积累时间的影响为了获得较高的频率分辨力和目标积累能量,OTHR 在检测舰船目标时多采用较长的相干积累时间(CIT),通常在几十秒甚至分钟量级.然而长CIT 下的舰船检测面临着如下问题[13]:①降低了雷达对各子区的重访频率,导致目标跟踪性能与雷达监视范围的矛盾;②增加了电离层扰动发生的概率,导致海杂波谱的搬移和展宽,增大对舰船目标的遮蔽范围.基于此,近年来提出了短CIT 下OTHR 舰船目标检测方法,然而短CIT 检测同时也带来了新的问题,即由于回波数据量不足而导致的多普勒分辨力低的问题.因此,CIT 对OTHR 舰船目标检测的影响是双重的.设风速为8m/s ,CIT 从10s 到60s 变化,图5给出不同CIT 下的归一化海杂波多普勒谱,其中图5(b)电离层相位污染是采用正弦函数来模拟0-2-121多普勒频率/Hz4030201050600-10-20-30-40-50-60-70-80-90CIT/s(a)不考虑相位污染CIT/s多普勒频率/Hz0-10-20-30-40-50-60-70-80-90(b)考虑相位污染图5不同CIT 下归一化海杂波多普勒谱相位污染,使其幅度和频率随CIT 呈线性变化(线性增长),以此满足CIT 越长电离层相位污染变化越剧烈的实际情况.由图5(a)可见,在不考虑电离层污染时,随着CIT 的增加,多普勒分辨力逐渐提高,海杂波峰也更加尖锐,这也是传统OTHR 采用长CIT 的原因所在.但在实际中电离层的影响总是不可避免的,由图5(b)可以看出,此时海杂波多普勒谱的变化随CIT 的增大呈现出一个先变窄后展宽的过程,即海杂波多普勒谱在CIT 为10~20s 时的谱展宽程度要大于CIT 为20~30s 的谱展宽程度,这是因为在CIT 较短时,回波数据不足导致的谱展宽大于电离层相位污染对杂波谱的影响.但从30s 往后,随着CIT 的不断增加,海杂波多普勒谱的展宽越严重,这是由于此时相位污染对杂波谱的影响显著增强,成为海杂波谱展宽的主要因素.因此,在长CIT 下,OTHR 舰船检测需要克服电离层对海杂波谱的调制展宽影响,而在短CIT 下则需要解决由频谱分辨力不足引起的展宽影响.4结束语OTHR 通过高频电磁波在电离层的折射和反射来探测海面舰船目标,电离层、海杂波以及外部干扰和噪声都会对舰船目标检测性能产生影响,其中电离层和海杂波是影响OTHR 舰船检测性能的主要因素.本文系统分析了与OTHR 舰船目标检测息息相关的目标特性和环境特性,在此基础上详细阐述了OTHR 舰船目标检测的特点和难点,并通过计算机仿真对海杂波背景下的OTHR 舰船检测进行了直观显性分析.仿真结果验证了理论分析结果.下一步将针对上述难点问题展开OTHR 舰船检测方法的具体研究工作.参考文献:[1]周万幸.天波超视距雷达发展综述[J].电子学报,2011,39(6):1373-1378.第5期崔晓梦,等:天波超视距雷达舰船目标检测特点及难点分析345[2]BARNUM J R.Ship detection with high-resolution HFskywave radar[J].IEEE Journal of Oceanic Engineering, 1986,11(2):196-209.[3]BARRICK D E.First-order theory and analysis of MF/HF/VHF scatter from the sea[J].IEEE Transactions on Anten-nas and Propagation,1972,20(1):2-10.[4]WALSH J,ZHANG Jianjun,GILL E W.High-frequency ra-dar cross section of the ocean surface for an FMCW waveform[J].IEEE Journal of Oceanic Engineering,2011, 36(4):615-626.[5]田明宏,吴洪,吴铁平.天波超视距雷达探测舰船目标的难点及关键技术研究[J].雷达与电子战,2009(3):21-26.[6]凡俊梅,焦培南,肖景明.海洋杂波对高频雷达检测海面上低速目标的影响[J].电波科学学报,1997,12(2):205-210.[7]罗欢,陈建文,鲍拯.电离层和海态对天波雷达多普勒谱的影响[J].信号处理,2014,30(5):489-497.[8]LIU Ziwei,SU Hongtao,HU Qinzhen.Radio frequency in-terference cancelation for skywave over-the-horizon radar [J].IEEE Geoscience and Remote Sensing Letters,2016,13(3):304-308.[9]LUO Zhongtao,WU Taifeng,HE Zishu,et al.Extraction ofsea-clutter and RFI regions based on image segmentation for high-frequency sky-wave radar[J].IET Radar,Sonar and Navigation,2019,13(1):58-64.[10]周文瑜,焦培南.超视距雷达技术[M].北京:电子工业出版社,2008:49-53.[11]李雪,李吉宁,娄鹏,等.行波扰动对天波雷达慢速目标检测影响研究[J].电波科学学报,2015,30(2):295-299. [12]鲁转侠,柳文,李雪,等.基于时频分析的电离层多模污染抑制研究[J].空间科学学报,2017,37(1):50-58.[13]张晓华,盛文,王国师,等.积累点数对天波雷达探测性能的影响研究[J].现代雷达,2014,36(4):1-4.Research and analysis on ship targets detection for skywaveover-the-horizon radarCUI Xiaomeng1,YAN Tao1,DUAN Guangqing2(1.Air Force Early Warning Academy,Wuhan430019,China;2.Armed Police NCO Academy,Hangzhou310000,China)Abstract:In order to study the skywave over-the-horizon radar(OTHR)ship target detection,this paper sys-tematically analyzes the characteristics of target,high frequency sea clutter,ionosphere and interference noise,on the basis of which the characteristics and difficulties of OTHR ship target detection are discussed.Finally,the pa-per combines with computer simulation to present the corresponding conclusions.The paper provides a theoretical basis for the future research on OTHR ship target detection method.Key words:skywave over-the-horizon radar(OTHR);ship targets detection;sea clutter;ionosphere;coherent integration time(CIT)《空军预警学院学报》声明近期有不法分子利用私人邮箱冒充我刊编辑人员收取作者审稿费、版面费等相关论文发表费用.本刊郑重声明,不收取作者任何费用(包括审稿费、版面费等),敬请广大作者通过我刊公布的邮箱投稿,如有问题及时电话联系,谨防受骗.为强化学术诚信意识,维护学术期刊的严肃性和科学性,并向广大读者负责,本刊一直以来都利用“科技期刊学术不端文献检测系统(AMLC)”对所有来稿进行学术不端检测,论文复制比应不超过20%.《空军预警学院学报》编辑部。
雷达技术简介及发展展望

摘要:文章简要介绍了雷达技术发展简史和雷达技术在现代国防中的地位和作用,简述了几种先进雷达的体制和技术的基本原理以及国外的先进雷达应用情况,提出了现代战争下雷达技术发展展望。
0 前言雷达(Radar)是英文“Radio Detection and Ranging”缩写的译音,意思是无线电检测和定位。
近年来更广义的Radar的定义为:利用电磁波对目标检测/定位/跟踪/成像/识别。
雷达是战争中关键的侦察系统之一,它提供的信息是决策的主要基础。
雷达可用于战区侦察,也可用于战场侦察。
装有雷达导引头的导弹、灵巧炸弹能精确地、有效地杀伤目标。
在反洲际弹道导弹系统,反战术弹道导弹系统中,雷达是主要的探测器。
雷达技术在导航、海洋、气象、环境、农业、森林、资源勘测、走私检查等方面都起到了重要作用。
下面简要叙述雷达技术发展简史。
雷达技术首先在美国应用成功。
美国在1922年利用连续波干涉雷达检测到木船,1933年6月利用连续波干涉雷达首次检测到飞机。
该种雷达不能测距。
1934年美国海军开始发展脉冲雷达。
英国于1935年开始研究脉冲雷达,1937年4月成功验证了CH(Chain Home)雷达站,1938年大量的CH雷达站投入运行。
英国于1939年发展飞机截击雷达。
1940年由英国设计的10cm波长的磁控管由美国生产。
磁控管的发展是实现微波雷达的最重要的贡献。
1940年11月,美国开发微波雷达,在二次世界大战末期生产出了10cm的SCR-584炮瞄雷达,使高射炮命中率提高了十倍。
二战中,俄、法、德、意、日等国都独立发展了雷达技术。
但除美国、英国外,雷达频率都不超过600MHz。
二战中,由于雷达的很大作用,产生了对雷达的电子对抗。
研制了大量的对雷达的电子侦察与干扰设备,并成立了反雷达特种部队。
二战后,特别是五、六十年代,由于航空航天技术的飞速发展,用雷达探测飞机、导弹、卫星、以及反洲际弹道导弹的需要,对雷达提出了远距离、高精度、高分辨率及多目标测量的要求,雷达进入蓬勃发展阶段,解决了一系列关键性问题:脉冲压缩技术、单脉冲雷达技术、微波高功率管、脉冲多卜勒雷达、微波接收机低噪声放大器(低噪声行波管、量子、参量、隧首二极管放大器等)、相控阵雷达。
激光雷达在海上船舶导航中的应用

激光雷达在海上船舶导航中的应用随着科技的不断进步,激光雷达逐渐成为船舶导航领域的重要工具。
激光雷达通过发射激光束来测量目标物体的距离和位置,具有高精度、快速反应和远距离探测等特点。
在海上船舶导航中,激光雷达应用广泛,并发挥着重要的作用。
首先,激光雷达在船舶导航中能够提供精确的目标探测。
传统的船舶导航依赖于航标和导航仪器,但这些方法受限于天气和可见性等因素。
而激光雷达利用激光束照射目标物体,通过测量反射光的时间和强度来确定目标的位置和距离。
因此,无论是在晴天还是在恶劣的天气条件下,激光雷达都能提供准确可靠的目标探测数据,为船舶的安全航行提供重要支持。
其次,激光雷达在海上船舶导航中还能够实现障碍物检测和避障。
在航行中,船舶常常面临各种各样的障碍物,如沉船、礁石、浮冰等。
这些障碍物可能造成船舶受损或航行困难。
而激光雷达能够及时探测并测量出障碍物的位置和大小,为船舶提供准确的障碍物信息。
船舶可以根据激光雷达提供的数据来规避障碍物,避免碰撞和其他事故的发生。
这对于海上船舶的安全与稳定航行至关重要。
除了提供目标探测和障碍物检测功能外,激光雷达还在船舶导航中发挥着其他重要的作用。
例如,激光雷达能够提供高精度的地形测绘和海洋地质勘测。
在进行航道测量和绘制航海图时,激光雷达能够精确测量海底地形和水深等信息,为船舶在复杂水域中的导航提供准确的地理数据。
此外,激光雷达还可以用于监测海上交通和船舶行为分析。
通过激光雷达的高精度测量,可以实时监测船舶的位置、速度和航向等信息,为海事管理部门提供有效的交通监控和船舶管理。
然而,尽管激光雷达在船舶导航中有着广泛的应用前景,但仍然存在着一些挑战和问题。
例如,激光雷达在海上导航中受到天气和水汽等因素的影响,可能会导致数据的不准确性。
此外,激光雷达的安装和维护成本较高,对于一些小型船舶而言可能难以承担。
因此,未来的发展方向需要进一步降低成本、提高稳定性和可靠性,以便更广泛地应用于海上船舶导航。
舰船目标RCS水面模拟试验及其应用探讨

舰船目标RCS水面模拟试验及其应用探讨
吴楠;陈炯
【期刊名称】《中国舰船研究》
【年(卷),期】2012(000)005
【摘要】舰船目标作为海上运行的武器平台,其电磁散射的最本质特征体现为目标与海面环境一体化的复合散射。
在舰船目标雷达波隐身性设计中,需要开展模拟RCS试验来验证方案可行性。
针对舰船所处海面环境的特点,采用双射线追踪方法分析了随机粗糙海面对舰船散射回波特性的影响,提出了关于舰船雷达波隐身设计流程的建议,论证并指出在技术设计阶段需要用接近实际环境的方法进行水面环境舰船隐身设计验证,结合数值仿真与本体RCS试验,掌握并控制舰船隐身性指标和强散射“要害点”,并从场地开阔性、测试方法等方面提出了舰船目标RCS 水面模拟试验的测试要求,从RCS指标设计验证、强散射中心分析、总体多专业协同设计等方面,探讨了模拟试验方法的应用和发展方向。
【总页数】5页(P103-106,118)
【作者】吴楠;陈炯
【作者单位】中国舰船研究设计中心电磁兼容性重点实验室,湖北武汉430064;中国舰船研究设计中心电磁兼容性重点实验室,湖北武汉430064
【正文语种】中文
【中图分类】U661.73
【相关文献】
1.微波超视距条件下舰船目标RCS分层计算方法 [J], 席泽敏;卢建斌;赵文强;张明敏;苑秉成
2.基于SBR的舰船目标多次散射RCS计算 [J], 丁凡
3.粗糙海面舰船目标 RCS 研究 [J], 李文兴;卢长新;宫建斌
4.基于并行MLFMA的SAR舰船目标RCS计算 [J], 陈俊;曲长文;杨俭;徐舟
5.基于海情和蒸发波导的舰船目标 RCS 研究 [J], 李文兴;朱太平;赵中洋
因版权原因,仅展示原文概要,查看原文内容请购买。
怎样发现隐形战机?

怎样发现隐形战机?怎样发现隐形战机?欢迎进入阿劳博客《十万个怎样》,是一个帮助您解决问题的百科博客。
内容来源于网络,仅供网友们参考。
由于事物的发展往往会出现不断的更新和变化,文章中有可能会出现不准确的地方,还有待不断的完善。
如果您有什么意见,可以在我的博客下方留言。
博客尾部的相关联文章可能会给您带来一定的帮助,并引入另外一个内部链接区里,最终找到您想知道的问题答案。
下面就对关于怎样发现隐形战机的问题进行解答。
1、超视距雷达(网络综合资料)超视距雷达就是利用电磁波在电离层与地面之间的反射或电磁波在地球表面的绕射探测地平线以下目标的雷达,又称超地平线雷达。
超视距雷达有两种基本类型:利用电离层对短波的反射效应使电波传播到远方的雷达,称为天波超视距雷达;利用长波、中波和短波在地球表面的绕射效应使电波沿曲线传播的雷达,称为地波超视距雷达。
天波超视距雷达的作用距离为1000~4000公里。
地波超视距雷达的作用距离较短,但它能监视天波超视距雷达不能覆盖的区域。
超视距雷达工作在P波段(米波),工作波长为10~60米,飞机等隐身武器系统主要对抗频率为0.2~29GHz的厘米波雷达,对米波几乎没有作用。
当雷达波束的波长接近于飞机的构件尺寸时,这些构件就像天线一样,开始吸收并反射无线电波。
当雷达波长达到“天线”尺寸的两倍时,其效果更佳。
隐身飞机的尺寸与超视距雷达的波长相近,因此很容易被这种雷达发现。
同时,天波雷达的雷达波是经过电离层反射后从上方照射到飞行器上的,因此它是探测隐身武器的有力工具。
国外试验表明,超视距雷达可以发现2800千米外、飞行高度150~7500米、雷达反射截面为0.1~0.3平方米的目标。
采用了相控阵技术的超视距雷达,能在1500公里处探测到像-2隐身轰炸机这样的目标。
超视距雷达在使用上也存在不少问题,例如只能获得目标的方位和距离信息,很难获得仰角信息;测量精度低、分辨率差;电波通道不稳定,干扰因素多,气候变化、北极光和太阳黑子直接影响天波超视距雷达的性能,甚至使它不能正常工作;在中波、短波波段,频谱拥挤,带宽窄,互相干扰严重。
美军预警探测系统组成概述

美军预警探测系统组成概述
黄挺松 李长军 中国电子科技集团公司第二十八研究所 210007
摘要 本文对美军预警探测系统组成进行了一定 程度的描述,按照不同种类目标(外层空 间目标、空中威胁目标、陆上目标、海上 目标、水下目标)的预警探测机制,分别 介绍了美军的相应装备情况以及技术特 点,对我军构建预警探测系统具有一定的 参考价值。 关键词 预警探测系统;预警卫星;弹道导弹;“宙 斯盾”;超视距雷达
-3 8 -
分类、跟踪大量地面目标,提供实时目 标位置及战场态势,并与飞机、远程炮、导 弹等纵深武器组成系统的装备。此外,E -8A还能提供打击后的实时战果情报。该 系统的关键技术是在地杂波中发现慢速目 标,以及在远距离(100km~200km)实 时分辨活动和静止的坦克、车辆等。
4.4 海上目标的预警探测系统 海洋监视系统不是单一的卫星系统, 而是由电子侦察,照相侦察,雷达成像侦 察和海洋环境侦察等多种卫星及雷达组成 的综合应用系统,目前只有美国和俄罗斯 装备了该系统。 美国“白云”海洋电子侦察卫星 第一代“白云”卫星采用 1 颗主卫 星 3 颗辅卫星的星座形式,采用被动式雷 达平衡测量仪对目标实施定位,可有效跟 踪潜航的核潜艇。第二代卫星仍采用一主 三副的卫星簇模式,但主卫星已采用 KH 卫星和“长曲棍球”卫星,可对动态目标 快速定位,美国目前正着力发展第三代卫 星系统[2]。 4.4.1 海洋环境观察卫星 因为海流、海浪对舰船的航行影响很 大,因此在海洋监视系统中,必须要配置 海洋环境监视卫星,利用这种卫星观测海 浪高度、海流强度、海面风速、海水温度 以及浅海危险物等,所探测的海洋环境作 为动态舰船目标的活动背景,可以准确定 位海上活动情况,对确定海洋监视目标的 特性关系重大。 4.4.2 航母编队预警系统 美军航母编队的预警探测系统是指航 母载预警机 E- 2C、航母载远程三坐标雷 达 SPS-48E 和宙斯盾 AEGIS 系统的 SPY - 1 相控阵雷达。美军航母载预警机 (E-2C)可向整个编队所有防空和反舰武 器系统提供预警和目标指示,并对防区和 防区外的留空飞机实施指挥控制。美军航 母装备的远程三坐标雷达(SPS-48E)可 以为航母编队提供早期预警,具有强大的 目标搜索能力,并提供三坐标数据,其他 舰艇在14秒内便可发射导弹迎击,将早期 预警时间提前至 5~6 分钟。 4.5 水下目标的预警探测系统 水下目标探测以水声探测为主,有 光、电、磁、温等多种探测方式,探 测的主要对象是潜艇,水雷等水下目 标。现代声纳已经与运载平台的其他探 测设备,武器发射系统和通信导航设备 组成舰艇反潜作战系统和机载反潜作战系
超视距雷达
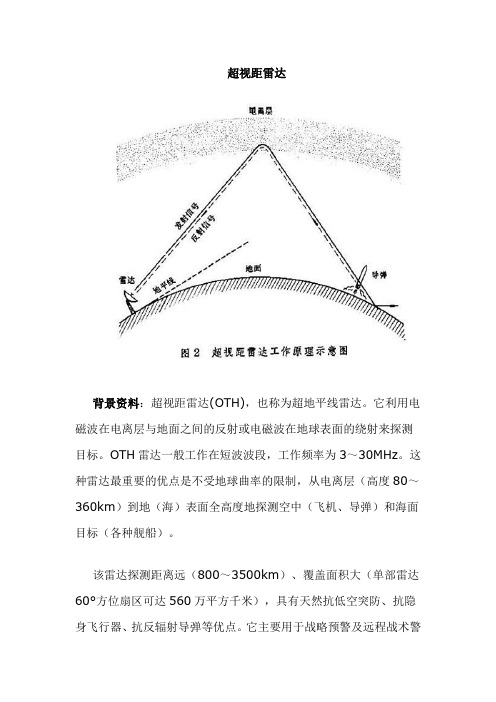
超视距雷达背景资料:超视距雷达(OTH),也称为超地平线雷达。
它利用电磁波在电离层与地面之间的反射或电磁波在地球表面的绕射来探测目标。
OTH雷达一般工作在短波波段,工作频率为3~30MHz。
这种雷达最重要的优点是不受地球曲率的限制,从电离层(高度80~360km)到地(海)表面全高度地探测空中(飞机、导弹)和海面目标(各种舰船)。
该雷达探测距离远(800~3500km)、覆盖面积大(单部雷达60°方位扇区可达560万平方千米),具有天然抗低空突防、抗隐身飞行器、抗反辐射导弹等优点。
它主要用于战略预警及远程战术警戒情报雷达系统,能以最经济的手段,最高的效费比实现对境外远程目标的早期预警,使国土防空(海)的预警时间提高到小时量级。
目前,世界上拥有先进雷达技术的国家,如美国、俄罗斯、澳大利亚、英国、法国、日本等,都先后研制和部署了OTH雷达系统。
美国空军对东海岸超视距雷达AN/FPS-118的验证过程中,该雷达不仅能发现3335.4千米(1800海里)以外的巡航导弹,而且能在大部分时间跟踪它们。
这些巡航导弹的RCS(雷达散射截面积)小于B-2轰炸机,但高于F-117A隐身战斗机。
该超视距雷达还能跟踪波多黎各岛上空飞行的长度只有4.3m的私人飞机。
超视距雷达能探测远距离的舰船。
ROTHR的试验结果表明,该雷达系统在一个特定的区域里对目标的探测和跟踪能力超过了海军的规定指标,它成功地跟踪了某一海域的25艘舰船中的24艘,而且对另一艘也能勉强跟踪。
苏联从1976年就研制出了OTH雷达,主要作用是作为第二层战略预警系统(预警卫星为第一层战略预警系统)。
苏联超视距雷达的工作频率为4~30MHz(一说为5~22MHz),其发射波形为大功率脉冲串,脉冲重复频率为10.5Hz,脉冲宽度小于2ms,发射功率为20~40mW。
据称,苏联的OTH雷达可能采用了多站技术。
俄罗斯的新OTH—B系统采用了天波—地波联合工作体制。
天波超视距雷达非均匀采样信号频谱重构

第46卷 第4期2024年4月系统工程与电子技术SystemsEngineeringandElectronicsVol.46 No.4April2024文章编号:1001 506X(2024)04 1236 11 网址:www.sys ele.com收稿日期:20221206;修回日期:20230426;网络优先出版日期:20230725。
网络优先出版地址:http:∥kns.cnki.net/kcms/detail/11.2422.TN.20230725.1807.002.html 通讯作者.引用格式:陈子睿,陈阿磊,刘维建,等.天波超视距雷达非均匀采样信号频谱重构[J].系统工程与电子技术,2024,46(4):1236 1246.犚犲犳犲狉犲狀犮犲犳狅狉犿犪狋:CHENZR,CHENAL,LIUWJ,etal.Spectrumreconstructionofnonuniformlysampledsignalsforover the horizonradar[J].SystemsEngineeringandElectronics,2024,46(4):1236 1246.天波超视距雷达非均匀采样信号频谱重构陈子睿,陈阿磊 ,刘维建,杨 军,陈文峰,马晓岩(空军预警学院,湖北武汉430019) 摘 要:受瞬态干扰影响和空海同时探测的需求,在长相参积累时间条件下,天波超视距雷达(over the hori zonradar,OTHR)回波信号的有效采样点往往缺损且非均匀,严重影响目标检测性能。
针对此问题,提出了一种基于压缩感知的OTHR频谱重构方法。
首先,建立了OTHR频域信号的稀疏模型;然后,提出了快速自适应复近似消息传递(fastadaptivecomplexapproximatemessagepassing,FACAMP)频谱重构算法并给出了算法实现步骤;最后,利用FACAMP算法实现了OTHR频谱重构并分析了重构性能。
一阶海杂波电离层多普勒频移和展宽
一阶海杂波电离层多普勒频移和展宽李宁;赵正予【摘要】为研究天波超视距雷达一阶海杂波电离层多普勒频移和展宽的变化规律,从电离层斜向返回探测海杂波功率谱中提取出不同电离层传播模式下的多普勒数据,对宁静地磁条件和发生磁暴2种情况分别进行了分析.结果表明,宁静地磁条件下,Es 层多普勒频移绝对值和多普勒展宽比F层小,并且稳定得多,更有利于天波超视距雷达对海面舰船目标进行检测和跟踪;磁暴发生期间,电离层多普勒频移绝对值及其不稳定度显著增加,多普勒展宽及其不稳定度也有所增加,从而导致天波超视距雷达对海面舰船目标的检测和跟踪能力下降.【期刊名称】《无线电工程》【年(卷),期】2018(048)009【总页数】6页(P793-798)【关键词】天波超视距雷达;电离层斜向返回探测;多普勒频移;多普勒展宽【作者】李宁;赵正予【作者单位】中国电子科技集团公司第二十七研究所,河南郑州450047;武汉大学电子信息学院,湖北武汉430079【正文语种】中文【中图分类】P3520 引言高频电波倾斜投射到电离层时,经电离层反射到达远方地球表面,因地球表面的不平坦和电气不均匀特性而产生散射作用,使得一部分电波能量沿着原路径返回而被接收到,这种无线电波传播过程称为天波后向散射传播[1]。
天波超视距雷达利用天波后向散射传播机制来实现空中和海面目标的远程超视距探测,单跳最大探测距离超过3 500 km,受2次电离层传输的影响,其回波信号会产生多普勒频移和展宽,严重影响海面舰船目标的探测性能[2-4]。
一方面,电离层多普勒频移会影响目标速度的估计精度,还会进一步影响目标跟踪性能;另一方面,天波超视距雷达信号经过2次电离层传输之后会使海杂波展宽,严重的时候会导致目标回波信号淹没在海杂波当中,无法被检测出来。
因此,研究电离层多普勒频移和展宽的变化规律对提升天波超视距雷达海面目标的检测和跟踪能力具有重要意义。
电离层斜向返回探测设备利用天波后向散射传播机制来实现对远距离、大范围的电离层状态进行实时监测,是天波超视距雷达频率管理系统的重要组成部分[5-6]。
超视距雷达原理-概述说明以及解释
超视距雷达原理-概述说明以及解释1.引言1.1 概述超视距雷达是一种能够实现远距离目标探测和跟踪的雷达系统。
与传统雷达相比,超视距雷达具有更大的探测范围和更高的分辨率。
它可以在远离目标的情况下进行有效的探测和跟踪,因此在许多领域有着广泛的应用前景。
超视距雷达的工作原理基于电磁波与目标之间的相互作用。
当超视距雷达发射电磁波时,它会经过大气层的散射和折射,然后与目标相互作用。
目标会将一部分电磁波吸收或反射回雷达系统。
通过接收和分析反射回来的电磁波,超视距雷达可以确定目标的位置、速度和其他相关信息。
超视距雷达的应用领域非常广泛。
在军事领域,超视距雷达可以用于侦察、监视和追踪敌方目标。
它能够提供重要的情报支持,帮助军队实时了解敌情并采取相应的行动。
此外,超视距雷达也可以应用于民用领域,例如航空、航海、交通监控等。
它可以用于飞机和船只的导航和监测,提高交通安全和效率。
总之,超视距雷达作为一种先进的探测和跟踪系统,具有重要的应用价值。
它的概念和原理为我们提供了一种突破传统雷达技术限制的方式。
未来,随着技术的不断进步和创新,超视距雷达将继续发展和演进,为各个领域带来更多的机遇和挑战。
因此,对超视距雷达技术的研究和应用具有重要意义。
1.2 文章结构文章结构部分的内容可以按照以下方式编写:文章结构本文主要分为引言、正文和结论三个部分。
引言部分首先概述了超视距雷达的背景和重要性,接着介绍了文章的结构和目的。
正文部分主要包括了超视距雷达的定义和原理、工作方式以及应用领域。
在超视距雷达的定义和原理部分,将详细介绍超视距雷达的基本概念和工作原理,解释其如何实现远距离探测和跟踪目标。
在超视距雷达的工作方式部分,将介绍它的运行方式和信号处理方法,包括波束形成、目标检测和数据处理等。
在超视距雷达的应用领域部分,将列举一些典型的应用场景和案例,例如空中交通管理、海上巡航和军事侦察等。
结论部分将总结本文对超视距雷达的重要性进行归纳,强调其在现实生活中的广泛应用和深远影响。
水面舰艇超视距目标定位方法及精度分析

雷达 探测 目标 分为 两种工 作 方式 : 是 主动 工 一
作方 式 引导攻 击 , 是被 动工 作方 式 引 导攻 击 。超 二 视距 雷达 在大 气波 导条 件下 , 探测 距 离可 达 数百 公
攻击 是 指利用 专 门 的远程 目标 指 示 系统 提 供 目标
随着 导弹技 术 的发展 , 反舰 导 弹作 战半 径呈 日 益增 大 的趋势 , 已远远 超 过 了普 通 的观测设 备 对 目
标 的观测 距离 。海 战实 践表 明 , 视距 攻 击 作 战 已 超 成 为水 面舰艇 反 舰 作 战 的主 要 作 战 样 式 。超 视 距
2 舰载超视距雷达进行超视距定位
中 图分 类号
Ov rt — rz n Ta g tLo alz to e ho e ・he・ - Ho i o r e c i a in M t d a d Ac u a y Ana y i o r a e Fo c n c r c l s s f rSu f c r e
K y W o d Ov rteH o i n rd r hp on eio tr ag tlc l ain e rs e-h - rz a a ,s ib r eh l pe ,tr e o ai to o c z Cls m b r TN9 a sNu e 5
1 引 言
指示 , 一般舰 载雷 达视 距 以外 的 目标所 实 施 的导 对 弹攻 击 。实现 对海 超视 距导 弹攻 击 的前 提是 , 舰 反
里, 但其 主 、 动 工作方 式 的战术 特点 差异 较大 。 被
主 动工 作 方 组 织 实施 简 单 , 位 速 度 快 , 定 一
高频地波雷达

一、简介高频地波雷达(HF Surface Wave Radar,简称HFSWR)作为一种新兴的海洋监测技术,具有超视距、大范围、全天候以及低成本等优点,被认为是一种能实现对各国专属经济区(EEZ)监测进行有效监测的高科技手段。
各临海发达国家均进行了研发投入,并实施了多年的对比验证和应用示范。
高频地波雷达利用短波(3~30MHz)在导电海洋表面绕射传播衰减小的特点,采用垂直极化天线辐射电波,能超视距探测海平面视线以下出现的舰船、飞机、冰山和导弹等运动目标,作用距离可达300km以上。
同时,高频地波雷达利用海洋表面对高频电磁波的一阶散射和二阶散射机制,可以从雷达回波中提取风场、浪场、流场等海况信息,实现对海洋环境大范围、高精度和全天候的实时监测。
高频地波超视距雷达的工作原理(R1为视距,R2为雷达作用距离)在军事应用领域,地波超视距雷达的工作波长和电波传播特性决定其具有独特的性能优势(相对于微波雷达而言):(1)作用距离远(300~400km);(2)极强的反隐身能力;(3)抗低空突防;(4)抗反辐射导弹,等等。
在海洋环境监测领域,地波超视距雷达具有覆盖范围大、全天候、实时性好、功能多、性价比高等特点,在气象预报、防灾减灾、航运、渔业、污染监测、资源开发、海上救援、海洋工程、海洋科学研究等方面有广泛的应用前景。
高频地波雷达应用示意图由于其独特的性能优势及应用前景,许多临海发达国家竞相研制、购臵和部署地波超视距雷达,以抵御现代战争的威胁并满足海洋开发与研究的需要。
美国、俄罗斯、英国、加拿大、德国、法国、澳大利亚、日本和新加坡等都研制过或正在发展高频地波超视距雷达,其中典型代表有加拿大的SWR-503系统、美国的Seasonde系统和德国的WERA系统等。
美国CODAR公司生产的著名SeaSonde地波雷达(交叉环/单极子是其典型特征)德国汉堡大学研制的WERA地波雷达系统美国雷声公司为加拿大生产的SWR-503系统武汉大学研制的中程高频地波雷达系统OSMAR二、历史雷达的前身是电离层测高仪。
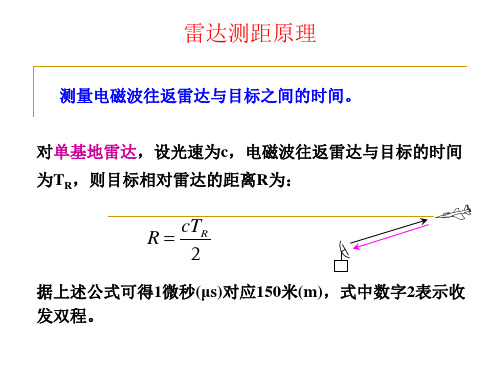
雷达测距原理及实现方法
Antiship Missiles
Detection and
Fighter and Small Boat
Tracking at 37Km Detection and Tracking
at 74Km
Ship Detection and Tracking at 200Km
2020/2/29
哈尔滨工业大学电子工程系
多种脉冲重复频率法
舍脉冲法
2020/2/29
哈尔滨工业大学电子工程系
27
n1=n2=0, tr=t1=t2
双脉冲重复频率解模糊
t1<t2, n1=n2=1, tr=4t2-3t1
2020/2/29
哈尔滨工业大学电子工程系
t1 t2
n1 2 3 n2
fr
f r1 3
fr2 4
tr
实现方法:
调幅——脉冲法测距 调频——频率法测距 调相——相位法测距
2020/2/29
哈尔滨工业大学电子工程系
15
D.K. Barton et al, Radar Technology Encyclopedia, Artech House, Inc., 1998
2020/2/29
哈尔滨工业大学电子工程系来自2020/2/29哈尔滨工业大学电子工程系
10
2020/2/29
哈尔滨工业大学电子工程系
11
微波超视距雷达 利用海上大气波导(大气超折射和对流层非均匀散射)传播效应是此系
统在微波段实现超视距探测的基础,分别对应主动、被动工作方式。
dn/dh比正常值更负时, 电波更加向地面弯曲。
详细分析:见《电磁波传播特性》章节。
微波雷达探测技术的应用

微波雷达探测技术的应用微波雷达是一种利用电磁波来探测目标的技术,其波长介于1mm至1m之间,频率范围在300MHz至300GHz之间。
由于其具有穿透能力强、天气影响小等优势,微波雷达越来越多地应用在军事、民用及科研领域。
一、微波雷达在军事上的应用微波雷达在军事领域中具有广泛的应用。
例如,它可以用于航空战术、污染控制、地形测绘、导弹控制、导航定位、侦察和侦查、通信系统以及极地探险等方面。
在现代战争中,微波雷达可以辅助军队进行目标侦察和追踪。
用微波雷达可以快速检测敌军的位置、大小、形状以及活动情况等。
另外,微波雷达可以在恶劣天气下进行作战,这对于没有好天气的地区而言是非常重要的。
二、微波雷达在民用上的应用微波雷达在民用领域中的应用也越来越广泛。
例如,在交通中,微波雷达可以辅助交通警察检查交通违规和监测交通流量;在船舶中,微波雷达可以帮助船员检测船舶周围的其他船只和障碍物,确保行驶安全;而在建筑工程方面,微波雷达可以帮助工程人员检测楼层混凝土钢筋的质量、探测地下管道等。
另外,微波雷达还有许多应用,如在气象中,微波雷达可以辅助气象专家进行天气预测;在能源领域,微波雷达可以辅助石油、煤等自然资源的勘探;在医学领域,微波雷达可以帮助医生进行癌症诊断等。
三、微波雷达的结构和工作原理微波雷达通常由发射器、接收器、信号处理器和天线等组成。
当微波雷达工作时,它会发射一定频率的微波信号,并将信号发射到周围的环境中。
当信号遇到与自身性质不同的物体时,就会发生反射,反射信号再通过天线接收回来,最后信号处理器会将接收到的信息转化为目标物体的位置、大小和形状等信息。
四、微波雷达在未来的发展趋势随着人工智能和互联网技术的发展,微波雷达技术也在不断的发展和创新。
在未来,微波雷达技术将越来越精细和智能,例如,一些微波雷达将集成图像处理能力和物理运算能力,从而实现更加准确的测量和目标定位。
另外,在未来,微波雷达的应用范围也将不断扩大,例如,在智能城市建设中,微波雷达将发挥重要作用,可以帮助城市规划者进行城市设计和监测城市规划效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 军 工程 大 学 海 洋 电磁 环 境 研 究所 , 北 武 汉 海 湖 403) 3 0 3
摘 要 :研 究 了蒸 发 波 导 环境 中雷 达 对 海 面 舰 船 目标 的最 远 探 测 距 离 预 报模 型 . 有 雷 达 超 视 距 探 测 距 现 离 预 报模 型 的 预 报 结果 往 往偏 离 实 际 雷 达观 测值 , 析 了现 有 预 报 模 型 的 不足 , 出利 用 高度 上 多个 散 分 提 射 中心 来描 述 海 面舰 船 目标 , 过 引入 目标 雷达 散 射 截 面 积 高 度 分 布 模 型来 对 现有 模 型 进 行 修 正 , 与 通 并 实 际观 测 数 据 进 行 了 比较 , 明 修 正 后 的 预 报 模 型 的预 报 结 果 与观 测 值 更 接 近 , 报 准 确 度 更 高 . 证 预 关 键 词 :蒸 发 波 导 ; 雷达 ; 大 作 用 距 离 ; 最 多散 射 中心 中圈 分 类 号 : O 1 TN l 文献标识码 : A 文 章 编 号 :0 12 0 (0 9 0 —7 10 10 —4 0 2 0 )40 4 —5
小 于 RC S较小 、 但等 效高 度在 6 m左右 的小型 目标距 离 预 报值 , 果 出现 雷 达 对小 型水 面 目标 探 测距 离 远 、 结 对 大型水 面 目标探测 距离 近 的预报结 果 , 这与 实际情 况 相悖 . 外 , 目标 等效 高 度在 6 而 另 当 右时, m左 由于雷 达 电磁波 传播 损耗很 小 , 此时预 报得 到的探 测距 离会 明显 偏 大 , 报准确 度 降低 . 预
obs r a i s a r o ea c a e e v t0n nd a e m r c ur t .
Ke o d : e a o a i n d c ;r d r y W r s v p r to u t a a ;ma i m e e t n r n e x mu d t c i a g ;mu t s a t rc n e o li c te e t r —
蒸 发波 导是 海面 上经 常 出现 的一 种大 气波 导 , 其影 响 , 载微 波 雷 达经 常 会 出现 超 视 距探 测 现 象. 受 舰 目
前 , 用海 上蒸发 波导 实现 超视距 探测 的微 波超 视距 雷达 是雷 达装 备发 展 的方 向之一 . 雷达 出现超 视距 探 利 在 测 时 , 对 海面 目标 的作 用距 离会 大 于视距 , 时其对 海 面 目标 最远 作用距 离 的预报 已经不 能再使 用传 统 的 其 此 视 距公式 , 必须使 用含 有传 播 因子 的雷达距 离 方程. 豪 等I 研 究 了蒸 发 波导 条件 下雷 达探 测距离 的估计 而 察 1 ] 方 法 , 过 电磁波传 播 的抛物 方程 , 通 引入 传播 因子 来描 述蒸 发 波 导对 雷 达探 测 距 离 的影 响 , 最终 得 到 蒸 发波 导 条件下 雷 达作用 距离 的一 种估计 方法 . 赵小 龙 [ 、 小 毛L 、 2黄 ] 3 焦林 [ 等在 研 究 蒸 发波 导 环 境 中雷 达 探测 性 ] 4 能 的评估 方法 时 , 基 于类似 的雷 达作 用距 离预报 模 型. 也 在实 际应 用 中发现 , 某些 情况 下 , 述雷 达作 用距 离预报 模 型对小 型水 面 目标探 测距 离预 报值 大于 对大 上 型 目标 的探测距 离 预报值 , 这显 然与 实 际情况 不符 . 另外 经 常会 出现探 测 距离 预 报 值偏 大 的情况 . 者 拟 引 笔 入 目标 雷 达散射 截 面积 ( S 的高 度分 布模 型 , RC ) 修正 上述 雷达 作用 距离 预报 模 型 , 除微 波超视 距 雷 达对 海 消
出现 上述 预报偏 差 的原 因在于 目标建模 时没 有考虑 到实 际 目标 RC S的空间分 布 , 而将 其简 单地 作 为点 目标 来考 虑. 在蒸发 波导 环境 中 , 传播 因子 F 随空 间变 化 , 是空 间坐标 的一个 三 维 函数 , 不但 在 距 离上 变 它 化, 在高 度上 也是起伏 的. 因此 在 目标 建模 时 , 考虑 到海上 舰船具 有一定 高度 , 的不 同高度部 分对 电磁波 需 它
20 0 9年 8月
西 安 电子 科 技 大学 学报 ( 自然 科 学 版 )
J0URNAL 0F X I I D AN UNI VERSI TY
Au . 0 9 g 2 0
第3 6卷
第 4期
Vo I 6 NO 4 l3 .
微 波 超 视 距 雷 达 对 海 面舰 船 目标距 离 的探 测
的后 向散射效 应不 同 , 计算 雷达探 测距 离时 , 引入 目标 R S在高度 上 的分布模 型. 在 应 C
2 现 有 预 报模 型 的修 正
在得 到蒸 发波 导折射 率剖 面后 , 利用 电波传 播 的抛 物方 程模 型可得 到传播 因子 在空 间的分 布. 不考 虑大
气 环境在 方位 上 的变化 , 即假设 场分 量只在 高度 和距离 上变 化 , 方位 上是 均 匀 的 , 传播 因子 F简 化 为距 在 则 离 R 和 高度 z的二 维 函数 . 将海 上舰 船 目标 视为 高度上 多散 射 中心的集 合体 , 其总 的 RC S为 d 类 似 于概率 ,
面 目标 探 测距离 预报 的误差 .
1 现 有预 报 模 型 的 缺 陷
现 有作 用距 离预报 模 型所基 于 的雷达 方程 为
收 稿 日期 : 0 80 — 5 2 0—60
作 者 简 介 : 爱 国 ( 9 5) 男 , 军 工 程 大 学 博 士研 究 生 , — i iag o ntaecm. 刘 1 7一 , 海 E mal u iu @ ees.o :l
S u y o he m i r wa e OTH a a a i u t d ft c o v r d r m x m m
de e to a g f s i s t c in r n eo h p
LI A igu , CH A a U — o H o
( n t fOc a l c r . En io m e t I s .o e n E e to v r n n ,Na a i .o g ,W u a 4 0 3 vl Un v fEn . hn 3 0 3,Ch n ) ia
பைடு நூலகம்
传 播 损 耗 ,B d
传 播 损 耗 /B d
( ) 察砸 离¥ k a观 0 m
( 蕊 寨距 离1 0 b) 6k
图 1 电磁 波 传 播 损 耗 曲线
由损耗 曲线 可见 , 由于蒸发 波导高 度较 高 , 电磁波 的传播 出现 明显 的陷获 效 应 , 在高 度 为6 n , 传播 处 其 r 损耗 出现最 小 值. 大 型水 面 目标 , 其视 为某 一 高度 上 的理 想点 目标 , 其 等效 高 度 大 于 6 则 虽 然 其 对 将 若 m, R S较 大 , 因 为其不在 损耗 曲线 的极 小值 点 上 , C 但 因此 利 用 现有 模 型得 到 的雷 达探 测 距 离 预报 值 就 可能 会
Ab ta t src : T he pr diton e c i m o l t e ad r axm u d t c i r ng o t s a ura e hi i de of h r a m i m e e ton a e f he e s f c s p n
e a r ton du t nvr nm e s S t did T h pr diton of he r s n r d Ove T he v po a i c e io nt i s u e . e e ci s t p e e t a ar r H orz n io dee ton r ng e c in mod lfe ue ty de a e sg fc n l r tc i a e pr dito e r q n l vit i niia ty fom a a e s e e s Thelm ia in r d rm a ur m nt . i t to o he pr s n p e c i od 1 S e c i d The s o he e tc lm ulis a t r e e o ft e e t r diton m e i d s rbe . u e f t v r ia t— c t e c nt r t m o lt de he s r a es p i e e t d. A e tc ld srbuto m o e he r d r s e ton i e o c r c he u f c hi s pr s n e v r ia i ti in d loft a arc o s s c i s us d t or e t t
p e e tp e it n mo e. F n l , t e p e it n y t e c r e t d mo e r o a e t h a a r s n r d c i d 1 i al o y h r d c i s b h o r c e d la e c mp r d wi t e r d r o h o s r a i n . Th r s l h ws h t h p e it n b t e o r c e mo e a r e bevt s o e e ut s o t a t e r d c i s y h c re t d o d l g e wel l wi t e t h h
72 4
西 安 电子 科技 大 学 学报 ( 自然科 学版 )
第3 6卷
P 一 PG0 F / (7 。 。 , , ( 4r R LL ) )
() 1
其 中 为发 射机 发射 功率 , , P 为接 收机 接收功 率 , G为雷达 天线 增益 , 为工作 波长 , 目标 的雷达 截面积 , 为 F为传播 因子 , 为 目标距 雷达距 离 , 系统损 耗 , 。为大气 吸 收损 耗 . R L为 L 由上 述雷 达方程 可 以看 出 , 此时是 将 目标 作 为 R S是 的理 想 点 目标 来考 虑 的. C 海上 舰 船 目标具 有 一 定 高度 , 其作 为点 目标来 建模 , 将 存在 两个 问题 : 一是其 等效 高 度不 便确 定 ; 二是 在 非稳 定 层结 ( 海 温差 小 气 于 或等 于 0 条件 下 , 些计算 结果 与实 际不符 . ) 某 以 20 0 7年 1 8日 1 月 0时 3 O分 在东海 某海 域进行 的蒸 发波 导 环境 中海 上 电磁 波 传播 损 耗测 量 实验 得 到 的一组 气象 数据 为例 , 时测 得海 表 温 度 为 1 . ℃ , 考 高 度 6 n 此 03 参 处气 温 为 5 4 , r . ℃ 相对 湿 度 5 , 速 2 风 8 8 m/ . . 9 s 利用 预报 蒸发波 导高 度 的 P uu-ek 模 型 , 算得 到此 时的蒸 发波 导 高度 为1 . 6 大气层 结 a lsJs e 计 2 3 m, 为不稳 定层结 , 时工作 于 x波段 、 此 天线架 高 1 的实验 雷达 的 电磁 波传播 损 耗在 距离 为 8 k 5n r 0 m和 1 0 m处 6k 高 度分 布 曲线如 图 1 所示 .