线性系统理论--考试资料
线性系统理论复习题纲
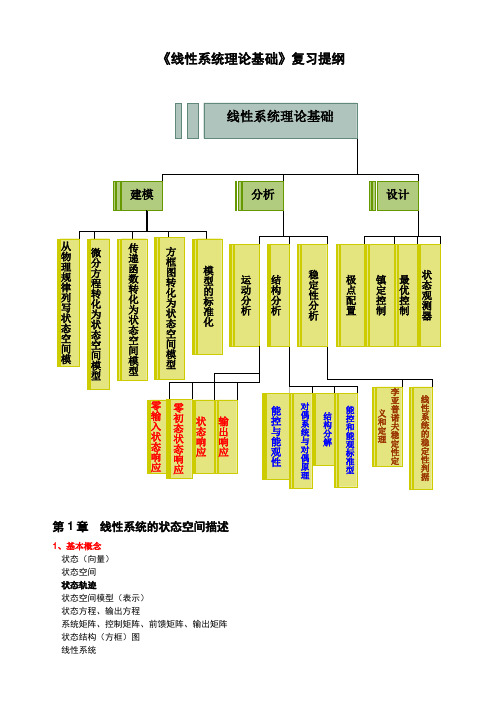
《线性系统理论基础》复习提纲第1章线性系统的状态空间描述1、基本概念状态(向量)状态空间状态轨迹状态空间模型(表示)状态方程、输出方程系统矩阵、控制矩阵、前馈矩阵、输出矩阵状态结构(方框)图线性系统时不变(定常)系统、时变系统连续时间系统、离散时间系统 状态线性变换矩阵的特征值、矩阵的特征向量 对角线标准型、约当标准型 模态标准型 正则型矩阵 范德蒙矩阵 传递函数矩阵2、知识要点%%知识点1:根据物理规律建立状态空间模型♦ 简单机械系统 ♦简单电气系统参考例题:例2.1.1,例2.1.2(P8)%%知识点2:微分方程模型转化为状态空间模型♦微分方程中不含输入导数项给定 ()(1)110n n n y a ya y a y bu --++++=&L ,选取状态向量12(1)n n x y x y x y -⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦&M M , 则有状态方程: 1122011010010n n n x x x x u x a a a x b -⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦&&M O M M M&L输出方程: []⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=n x x x y M Λ21001 例2.1.3 (注意:方框图在没有要求时可以不画出) ♦微分方程中包含输入函数导数项,且m n <给定()(1)()(1)110110n n m m n m m ya y a y a yb u b u b u b u ----++++=++++&&L L ,m n <,将其转化为()(1)110()(1)110n n n m m m m y a y a y a y u y b yb y b y b y ----⎧++++=⎪⎨=++++⎪⎩&%%%%L &%%%%L ,选取状态向量12(1)n n x yx y x y-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦%&%M M %,则有状态方程 120110100101n n x x u x a a a -⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦&&M O M M &L 输出方程 12011[,,,,0,,0]m n m n x x y b b b x --⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦L L 123M例2.1.4 ♦ 微分方程中包含输入函数导数项,且n m =若()(1)()(1)110110n n n n n n n ya y a y a yb u b u b u b u ----++++=++++&&L L ,让n y y b u =-%,则转化为如下微分方程的形式()(1)(1)(1)110111100()()()n n n n n n n n n y a y a y a y b a b u b a b u b a b u -----++++=-++-+-%%%%&L L 。
(完整word版)《线性系统理论》试卷及答案
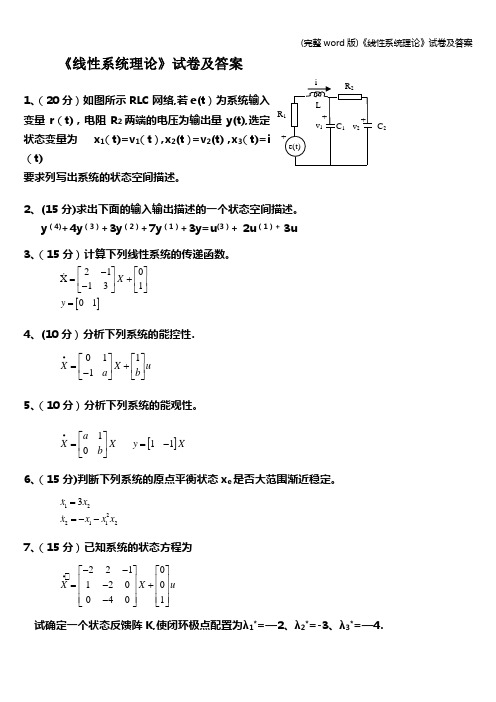
R C 2《线性系统理论》试卷及答案1、(20分)如图所示RLC 网络,若e(t )为系统输入变量r (t),电阻R 2两端的电压为输出量y(t),选定状态变量为 x 1(t)=v 1(t ),x 2(t )=v 2(t),x 3(t)=i (t)要求列写出系统的状态空间描述。
2、(15分)求出下面的输入输出描述的一个状态空间描述。
y (4)+4y (3)+3y (2)+7y (1)+3y=u (3)+ 2u (1)+ 3u3、(15分)计算下列线性系统的传递函数。
[]210X 13101X y -⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦=4、(10分)分析下列系统的能控性.0111X X u a b •⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦5、(10分)分析下列系统的能观性。
[]1110a X X y Xb •⎡⎤==-⎢⎥⎣⎦6、(15分)判断下列系统的原点平衡状态x e 是否大范围渐近稳定。
12221123x x x x x x==--7、(15分)已知系统的状态方程为221012000401X X u •--⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦试确定一个状态反馈阵K,使闭环极点配置为λ1*=—2、λ2*=-3、λ3*=—4.答案:1、(20分)如图所示RLC 网络,若e (t )为系统输入变量r (t ),电阻R 2两端的电压为输出量y (t ),选定状态变量为 x 1(t)=v 1(t),x 2(t )=v 2(t ),x 3(t)=i (t )要求列写出系统的状态空间描述。
2、(15分)求出下面的输入输出描述的一个状态空间描述。
列出向量表示形式解出解出解出r x x x L R x x x rx LR x x x xx x C R x x x C xC x r x R x L L LL⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--=-=+=+==++1321113211311132122222112211333113000xy x xLy (4)+4y (3)+3y (2)+7y (1)+3y=u (3)+ 2u (1)+ 3u[]得出了状态空间表达式列出向量表示形式,就求导,有选取状态变量令有令⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=++=⎪⎪⎩⎪⎪⎨⎧+----=========⎩⎨⎧++==++++++++=++++++===43211025233375y ~y ~x y ~x y ~...y ~x y ~x y ~3y ~2y ~y ~3y ~7y ~3y ~4y ~u 3734p 1y ~3734p 32p y d/dtp 4214321(4)43(2)22(1)1(3)4(1)21(1)(3)(1)(2)(3)(4)2342343x x x x x x x y u x x x x x x x x y u p p p u p p p p(完整word 版)《线性系统理论》试卷及答案3、(15分)计算下列线性系统的传递函数.[]Xy u X 10103112X =⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=[][][]计算得出传递函数⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-------=-=⎥⎦⎤⎢⎣⎡-------=⎥⎦⎤⎢⎣⎡--=--==⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡--==⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=----1021131)3)(2(110)()(21131)3)(2(13112)()()(1010311210103112X 1111s s s s B A Is C s G s s s s s s A Is BA Is C s G CB A Xy u X(完整word 版)《线性系统理论》试卷及答案4、(10分)分析下列系统的能控性。
《线性系统理论》课程练习题

《线性系统理论》课程练习题《线性系统理论》课程练习题姓名___________ 学号__________ 专业__________ 1. 根据下列单输入单输出线性定常系统的微分方程或传递函数描述:(1)(3)(2)(1)(2)(1)23532 y y y y u u u +++=++(2)332287 (s)524s sgs s s++=+++列写其状态空间表达式.2.关于矩阵指数函数的性质与计算:(1) 列举矩阵指数函数Ate的基本性质(至少5条);(2) 若已知22222222t t t tAtt t t te e e eee e e e----------= ?--,试计算矩阵A.3.给定一个连续时间线性定常系统,设其约当规范形为2100021002040200731000311030412 02010010011042011001x x uy x=+ ? ? ? ?- ? ?- ? ?-= ? ???试判断其能控性与能观性.4.关于连续时间定常系统的稳定性判据:(1) 描述下列连续时间定常系统的特征值判据与李亚谱诺夫判据;0,(0),0x A x x x t ==≥ (2) 判别下列自治系统平衡状态的渐近稳定性.1123x x -??= ?-??5. 关于极点配置定理与算法:(1) 简述单输入n 维连续时间定常系统的极点配置定理;(2) 描述单输入连续时间定常系统的状态反馈极点配置算法.。
线性系统理论(2013.7.26)
定义 Φ(t ) e At L1[(sI A)1 ] 为系统状态转移矩阵
解状态方程的关键——求状态转移矩阵 。
13
已知状态方程及初始条件:x1(0)=1,x2(0)=0,求解该齐次方程。
1 0 x x 1 1
解:
(sI A)-1
1 s 1 0 (s - 1)2 1 s - 1
系统结构图:
U1(s) G1/s 11(s) Y1(s)
0 G21(s)
1/s(s+2) G12(s)
U2(s)
1 y1 s y 2 0
1 s( s 2) u1 1 u2 s2
1/(s+2) G22(s)
y c1m c1,m 1 c12 c11 X
2) 由系统结构图建立状态空间表达式
4
例 系统如图,试建立起状态空间表达式。 u
—
k x3 1 x2 1 s1 s2 s
x1
yHale Waihona Puke 解:由结构图X 1 ( s) 1 X 2 ( s) s
x1 x2
X 2 ( s) 1 X 3 ( s) s 2
y x1
5
5 矩阵的特征方程、特征值
1)方阵A的特征方程与特征值 设A 为n×n的方阵,如有一未知量λ ,则: 0 a11 a12 ... a1n a11 a12 a 21 a22 ... a 2 n a21 a 22 I A ... ... ... ... ... ... an1 an 2 ... ann an1 a n 2 0
线性系统理论考点汇总

4
系统运动的稳定性
考点 4.1. 渐进稳定: 对特征多项式det(sI − A)运用劳斯判据。 特 征 多 项 式 系 数 都 大 于0是 渐 进 稳 定 的的 必 要 条 件。 BIBO稳定: 传递函数的极点均具有负实部。 考点 4.2. 大范围渐进稳定。 步骤:1、V (x)c。 ˙ (x)负定。或V ˙ (x)半负定,系统状态方程的解 2、V 只有平衡状态(导数不恒为0)。 3、||x|| → ∞,V (x) → ∞ 考点 4.3. P A + AT P = Q,Q = −I 。 若P对称正定,则大范围渐进稳定。
考点 3.1. 系统是否能控/能观。 若A无特定形式:采用秩判据。 若A为 约 旦 规 范 形: 不 同 特 征 值 的 约 旦 块 末 行(首 列)非 零。 相 同 特 征 值 的 约 旦 块 末 行(首 列)线 性 无 关。 考点 3.2. 判断连续时间线性线性时变系统是否完 全能控。 M0 (t) = b(t) 0 (t) M1 (t) = −AM0 (t) + dM dt 对于任意的t,rank M0 (t) M1 (t) 满秩,系统完 全能控。 考点 3.3. 求线性时不变系统的能控性指数和能观 性指数。 使能控性判别阵rank B AB . . . 满秩。 A的最小幂次为α。能 控性指 数u=α+1 C 使能观性判别阵rank CA 的满秩。 ... A的最小幂次为β 。能观性指数v=β +1 考点 3.4. 已知状态空间表达式, 求能控规范性及 其变换阵。 步骤:1、列出特征多项式det(sI − A) 1 0 0 2、变换阵P = A2 B AB B a2 1 0 a1 a2 1 −1 −1 3、A = P AP , B = P B , C = CP 能观规范形形式上对偶。 考点 3.5. 定出三阶龙伯格能控规范形。 取能控性判别阵线性无关的三列,构造变换阵P −1 。 由P的块末行导出变换阵S −1 。 基于状态变换x = S −1 x,导出变换后系统的系数矩 阵。 考点 3.6. 传递函数的能控规范形实现。 提 出 直 接 传 递 矩 阵 化 简 后 分 母 必 须 为严 真 首 一 多 项式。 考 点 3.7. G(s)的 行 列 维 数 为 能 观 块 维 数 和 能 控 块 维数。 考点 3.8. 传递函数矩阵的最小实现。 考点 3.9. 按能控性分解。 取 能 控 性 判别 阵 的 非 零 向Q量q1 ,另取 线 性 无 关 非 零向量q2 ,构成变换矩阵Q。 基于状态变换x = Q−1 x,导出变换后系统的系数矩 阵 考点 3.10. 定出能控能观子系统。
线性系统理论试题

x&1 x&2
=
−7
0
x&3 0
0 −5 0
0 x1 0
0
x2
+
4
−1 x3 7
0
0 5
u1 u2
解:由于对角规范型中 B 包含元素全为零的行,故系统不完全能控。
3.(约当规范形判据的应用)判断下面系统的能控性和能观性
1 1 0 0 0 1
x&
=
0 0
1 0
0 1
u = e(t),输出变量 y = uc。
解:
e
=
uc
+
R
⋅C
duc dt
, x& = − 1 x + 1 u RC RC
, y=x
2.(由输入输出描述建立状态空间描述)系统的传递函数如下,求系统的状态空 间描述
G(s)
=
s3
s2 + s + 5 + 6 s2 + 12 s
+
4
0 解:可控标准形, x& = 0
s −1 0 1 det(sI − A) = 0 s −1 0 = (s −1)2 (s − 2) = 0
0 0 s−2
则系统特征值为 λ1 = 1( λ1 的代数重数 σ1 = 2 ), λ2 = 2 ( λ2 的代数重数 σ 2 = 1 )。 (2)有重特征值,判断是否可以化为对角规范形
对于 2 重特征值 λ1 = 1,它所对应的特征矩阵
1 0
υ11
= 1,υ22
= 1 ,得到
2
个属于二重特征值 λ1
= 1的特征向量υ1
=
0
江苏大学线性系统理论(现代控制理论)考试必备--第3章
有限时刻 , t f , t0对 t时f 刻J 的非零t0初始状态
x(t0 ) , x可0 找到一个无约束的容许控制u(t),能在一个有限
的时间间隔内 t ,[t0使,t f某] 一状态轨线在 时刻为t f
,则
称此x(状t f )态在0 时刻为完全能控t的0 。
tf
定义2 如果存在一个无约束的容许控制u(t),能在一个有
【例1】 判别下1 0
x1 x2
0 1
u
解:首先确定出系统的能控判别阵U,并判别阵U的秩。
rankU rank[B
AB]=rank
0 1
1 0
2
显然,由于 rankU n 2 ,因此该系统完全能控。
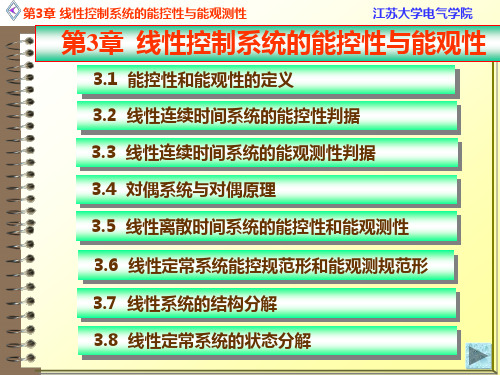
第3章 线性控制系统的能控性与能观测性
江苏大学电气学院
状态变量是系统的一个内部变量,能否通过系统输入、 输出这一对外部变量来建立或确定系统的初始状态,这是 系统能控性、能观性问题所要研究的内容,也即研究系统 这个“黑箱”的内部状态能否由输入来加以影响和控制以 及能否由输出来加以反映。
第3章 线性控制系统的能控性与能观测性
江苏大学电气学院
如果系统内部的所有状态的运动能够由输入来加以影响 和控制,就称系统是完全能控的,否则系统就称为不完全 能控的或不能控的。同样,如果系统内部所有状态变量的 任意运动形式均可由输出完全地反映出来,则称系统为完 全能观的,否则就称系统为不完全能现的或不能观的。
第3章 线性控制系统的能控性与能观测性
江苏大学电气学院
对于线性定常系统的状态方程可写为:
x Ax Bu , x(0) x0 , t 0
记为{A,B},其中:x为n×1状态向量;u为p×1输入向量; A为n×n常值矩阵;B为n×p常值矩阵。 线性定常系统能控性的常用判据 1. 格拉姆矩阵判据 定理1 线性定常系统{A,B}完全能控的充分必要条件是,存 在一个有限时刻 tf > 0,使如下定义的格拉姆(Gram)矩阵
线性系统复习题—答案 - 副本

1、已知线性定常系统状态方程为:Ax x =.其中,⎥⎦⎤⎢⎣⎡-=2310A (1)采用线性变换化A 为对角型;32231det )det(2-+=⎥⎦⎤⎢⎣⎡+--=-s s s s A SI 特征值:1,321=-=λλ鉴于系统矩阵是能控规范型,且特征值互异,故取变化矩阵⎥⎦⎤⎢⎣⎡-=1311P ⎥⎦⎤⎢⎣⎡-==⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=--13,41434141 11AP P A P 故有则(2)求出状态转移矩阵)(t Φ;⎥⎦⎤⎢⎣⎡+--=-231)(s sA SI⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-++-++--++--++=⎥⎦⎤⎢⎣⎡+-+=--=--141343143343141341143341312)1)(3(1)()()(1s s s s s s s s s s s s A SI A SI adj A SI (主对换,负变号)()[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-+-+=-=Φ∴------t t tt t t tt e e e e e e e e A SI L t 4143434341414341)(333311 (3)初始状态T x ]10[)0(=时,写出系统齐次状态方程)(t x 。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-=Φ==--t t t t Ate e e e X t X e t X 41434141)0()()0()(332、已知系统方程为:[]x y u x x 110,121201112201=⋅⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⋅⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⋅(1)写出对偶系统的状态空间描述;;(2)写出原系统的能控矩阵c Q 、能观矩阵o Q ;(3)写出对偶系统的能控矩阵c Q 、能观矩阵o Q ;(4)运用对偶原理,判断原系统及其对偶系统的状态能控、能观测性。
原系统 :能控性: 能观测性:rank( )=3=n即原系统属于完全能控和完全能观系统。
对偶系统 : 根据对偶原理完全能控 完全能观测 完全能观测 完全能控推出,对偶系统属于完全能控和完全能观系统。
江苏大学线性系统理论(现代控制理论)考试必备--第2章
t e 0 0 0 0 te e
(t; t0 , x0 , u) (t ; t0 , x0 , 0) (t ;t0 , 0,u )
线性系统的一个基本属性是满足叠加定理。基于叠 加定理,可将线性系统的全响应可看成初始状态 x0 和 输入u(t)共同作用下的系统状态运动 x(t ),分解为由初始 x0 和输入u(t)分别单独作用所产生的响应的叠加。 状态
e A1t
e2t
n t e
Al t e
典型2 若矩阵A为对角线分块矩阵,则 e 为:
A2
At
e
At
e A2t
第2章 线性系统的运动分析
江苏大学电气学院
典型3 若矩阵A具有如下形式 ,应用e At 的定义式,可得 e At
性质9 e 的相似变换 如果矩阵A的特征值互不相同,并且存在非奇异变换 矩阵P,使得 A PAP 1,由 e At定义可得到:
At
e At Pe At P 1
第2章 线性系统的运动分析
At e 三. 几种典型的矩阵指数函数
江苏大学电气学院
由于矩阵指数函数 e At在计算线性系统的响应起着十分
第2章 线性系统的运动分析
江苏大学电气学院
三. 零输入响应和零状态响应及全响应
1. 零输入响应 线性系统的零输入响应是指只有初始状态作用即 x0 0 , 而无输入作用即 u(t ) 0 时的系统的状态响应。此时,系 统的状态方程为
A(t )x , x(t0 ) x0 , t t0 , t x
显然,e At 和矩阵A一样,也是一个方阵。
3002线性系统理论A
空军工程大学2012年博士研究生入学试题考试科目:线性系统理论(A卷)科目代码 3002 说明:答题时必须答在配发的空白答题纸上,答题可不抄题,但必须写清题号,写在试题上不给分; 考生不得在试题及试卷上做任何其它标记,否则试卷作废,试题必须同试卷一起交回。
一、(20分每题2分)判断题(√正确或×错误)1、单输入输出系统的状态变量描述非唯一,则系统的输出函数y(t)也非唯一。
2、状态反馈不改变系统的可观测性。
3、线性系统经非奇异线性变换后,其输出函数一定和原来的相同。
4、线性系统经非奇异线性变换后,其特征值一定和原来的系统相同。
5、若系统状态可控,则系统的输出可控。
6、一个线性系统Ⅰ和它的对偶系统Ⅱ,若线性系统Ⅰ可控,则它的对偶系统Ⅱ可控。
7、矩阵(sI-A)的逆矩阵必存在。
8、传递函数方法求出的系统响应,一定和状态方程方法求出的系统响应相同。
9、若系统在经典意义下稳定,则系统是Lyapunov稳定,BIBO稳定。
10、连续时间线性定常系统经过时间离散化之后,其可控、可观性保持不变。
二、(15分)写出如图系统状态空间表达式,并计算系统的极点(特征值)。
三、(20分)已知齐次状态方程xAx = ,其状态转移矩阵为 22222()222t tt t t t t t e e e e t e ee e φ--------⎡⎤--=⎢⎥-+-+⎣⎦,要求 1、计算系统矩阵A ; 2、计算系统特征值,确定系统是否内部稳定?3、设初态[](0)11T x =-,计算t=1s 时的状态x(1) ;4、若阵[]01T B =,[]10C =,计算系统的传递函数()()Y s U s 。
四、(15分)已知系统的动态方程为[]11122233301000010,5504631x x x x x u y x x x x ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+ =⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦1、 分析该系统的能控性和能观性;2、 若系统不完全能控或不完全能观,做相应的能控性或能观性分解。
线性系统理论试卷(1)

一、给定多项式矩阵如下:22121()12s s s s D s s s ⎡⎤⎢⎥⎢⎥⎣⎦++++=++ 1. 计算矩阵的行次数,判断系统是否行既约?2. 计算矩阵的列次数,判断系统是否列既约?3. 寻找单模矩阵,将多项式矩阵()D s 化为史密斯型。
方法1、 进行初等变换成二、设系统的传递函数矩阵为右MFD 1()()N s D s -,其中:210()21s D s s s s ⎡⎤⎢⎥⎢⎥⎣⎦-=+-+,()11N s s s ⎡⎤⎣⎦=-+ 试判断{}(),()N s D s 是否右互质;如果不是右互质,试通过初等运算找出其最大右公因子。
最大右公因子进行列变换可得()0R s ⎡⎤⎢⎥⎣⎦三、给定()G s 的一个左MFD 为:121010()1121s s G s s s s -⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦-+=+-+ 试判断这个MFD 是否是最小阶的;如果不是,求出其最小阶MFD 。
四、确定下列传递函数矩阵的一个不可简约左MFD:2110()1022s ss G s s s s s ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦+=+++五、给定系统的传递函数矩阵为223(1)(2)(1)(2)()31(1)(2)(2)s s s s s s G s s s s s s ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦+++++=+++++ 试计算出相应的评价值,并写出其史密斯--麦克米伦型。
六、给定传递函数矩阵如下:22221156()125343s s s s s G s s s s s ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦+-++=++++ 试定出其零、极点,并计算出其结构指数。
七、给定系统的传递函数矩阵如下:22211154()143712s s s s G s s s s s ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦+-++=++++ 试求出一个控制器型实现。
八、确定下列传递函数矩阵()G s 的一个不可简约的PMD22141()14332s s s s G s s s s s ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦++-=++++九、给定系统的传递函数矩阵如下:12243011()22121s s s s G s s s s s -⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦++-+=+++试设计一个状态反馈K,使得状态反馈系数的极点为:12λ*=-, 23λ*=-, 4,542j λ*=-±。
线性系统理论(复习)

u
u1
x1
1
y1
x2
2
y2 y
y1 1 0 x1
R
S2: x2 x2 3u2
y2 2x2
+
e(t)
i
C - uc
e
uc
RC
duc dt
,
x 1 x 1 u, RC RC
yx
解:
1 2 0 1
.
x
A1 B2C1
0 A2
x
B1
B2
D1
u
0 3
3 0
0 x1 3 u 1 0
例 线性定常系统的齐次状态方程为
x1 x2
0 2
1 x1
3
x2
求其状态转移矩阵 eAt
解
[sI
A]1
s 2
1
1
1 s 3
s 3
(s 1)(s
2)
2
1 s
s
2 1
s
1
2
2 s 1
s
2
2
s
1 1
s
1
2
1 s 1
s
2
2
于是
eAt L
1[sI
A]1
2et
x1
x2
[D1
D2
]u
G(s) G1(s) G2 (s)
:
p
x1 A1
xN
y C1
x1 B1
u
AN xN BN
CN
x1 x2
[D1
DN ]u
N
G(s) Gi (s) i 1
u1
例:求如下并联系统的状态空间描述 u
0 1 0
2012-工硕-线性系统理论与设计-试卷
辽宁科技大学工程硕士研究生期末考试试题用纸共1页第1页
2012–2013学年度第1学期工程硕士研究生
线性系统理论与设计课程期末考试试题
(考试方式:开卷)
1、(15分)简述“线性系统理论与设计”和“自动控制原理”的区
别;
2、(15分)简述系统运动分析的核心问题;
3、(10分)简述本课与你现实工作的关系;
4、(20分)简述线性系统理论稳定性分析的关键问题;
5、(20分)简述系统的能控性、能观性实质问题;
6、(20分)用公式表示状态反馈和状态观测器的设计;
注:请同学整理后,打印上交答卷。
教学院长:陈雪波出题教师:陈雪波。
江苏大学线性系统理论(现代控制理论)考试必备--第4章

间关系和因果关系,可将受扰运动表示为
x0u (t ) (t ; x0 , t0 ) , t [t0 ,)
式中, 表示向量函数,括号内分号前反映对时间t 的函
数关系,分号后用以强调导致运动的初始状态x0 及其作用 时刻t0 。显然,对 t=t0 ,受扰运动的向量函数满足
(t0 ; x0 , t0 ) 0
则称平衡状态 xe 是李雅普诺夫意义下的稳定。如果 xe 0 ,则称原点是李雅普诺夫意义下的稳定的。
第4章 控制系统的稳定性分析
江苏大学电气学院
这个定义的几何意义是:对给 定的实数 0 ,存在实数
( , t0 ) 0 (其大小依赖于 和 t0 )。在状态空间中以原点 xe
式中的A(t)为n×n时变矩阵,且满足解存在唯一性条件。
设系统的状态零输入响应 x0u (t )是由任意非零初始状态 x0
引起的状态响应。 定义2(内部稳定性) 对于连续时间线性时变系统,如果由 时刻t0 任意非零初始状态 x(t0 ) x0 引起的状态零输入响
)是有界的,并满足 应 x0u (t ) 对所有t [t0 ,
第4章 控制系统的稳定性分析
江苏大学电气学院
四. 李雅诺夫稳定性定义
1. 自治系统、平衡系统和受扰系统 系统运动的稳定性实质上归结为系统平衡状态的稳定 性。直观上,系统平衡状态的稳定性就是,偏离平衡状态
的受扰运动能否只依靠系统内部的结构因素,或者使之限
制在平衡状态的有限领域内,或者使之同时最终返回到平 衡状态。 定义1(自治系统) 没有外加输入作用即不受外部影响的系 统称为自治系统。自治系统的一般描述为
第4章 控制系统的稳定性分析
江苏大学电气学院
在几何上,受扰运动 (t ; x0 , t0 ) 呈现为状态空间从初始点
研究生线性系统理论题
1.为什么要对连续系统进行离散化?离散化有哪些方法?它们各自的特点是什么?因为连续系统在电脑上无法实现,只能把连续系统离散化,而离散华是将连续变化的模拟量信号,转换成数字量(脉冲)信号,但是这里的离散化是非常密集的,在误差允许的范围内,可以非常的逼近原函数.这样就能用数字电子计算机(电脑)进行计算或处理。
1.前向差分法S平面左半平面得极点可能映射到Z平面单位圆外,这种方式所得到得离散滤波器可能不稳定2.后向差分法变换计算简单;S平面得左半平面映射到Z平面得单位圆内部一个小圆内因此如果D(s)稳定则变换后的D(z)也稳定;离散滤波器得过程特性及频率特性同原连续滤波器比较有一定得失真,需要较小得采样周期T。
3.双线性变换法如果D(s)稳定,则相应得D(z)也稳定;D(s)不稳定,则相应的D(z)也不稳定;所得D(z)的频率响应应在低频段与D(s)得频率响应相近,而在高频段相对于D(S)得频率响应有严重畸变。
4.脉冲响应不变法D(z)和D(s)有相同得单位脉冲响应序列;若D(z)稳定,则D(s)也稳定;D(z)存在着频率失真。
该法特别适用于频率特性为锐截止型的连续滤波器的离散化。
主要应用于连续控制器D(s)具有部分分式结构或能较容易地分解为并联结构,以及D(s)具有陡衰减特性,且为有限带宽得场合。
这时采样频率足够高,可减少频率混叠影响,从而保证D(z)得频率特性接近原连续控制器D(s)。
5.阶跃响应不变法若D(s)稳定,则相应的D(z)也稳定;D(z)和D(s)得阶跃响应序列相同;6.零极点匹配法需要先求出连续传递函数得全部零极点,计算复杂;能够保持变换前后特征频率处得增益不变;不改变系统得稳定区域,变换前后G(z)和G(s)的稳定特性不变2.多输入/多输出系统能控性和能观测性与系统传递函数矩阵的关系如何?在单输入单输出系统中,能控且能观测得充分必要条件是传递矩阵G (s )的分母与分子之间不发生因子相消。
【理论】北航线性系统理论完整版答案

【关键字】理论1-1 证明:由矩阵可知A的特征多项式为若是A的特征值,则所以是属于的特征向量。
1-7 解:由于,可知当时,,所以系统不具有因果性。
又由于,所以系统是时不变的。
1-8 解:容易验证该系统满足齐次性与可加性,所以此系统是线性的。
由于而,故,所以系统是时变的。
又因为而,故,所以系统具有因果性。
1-11 解:由题设可知,随变化的图如下所示。
随变化的图如下所示。
从上述两图及所描述的系统,分析如下:当,且即时,有;当时,;当时,有;当时,有;当时,有;综上所示,该松弛系统在上述输入而激励的输出为:1-15 解:由上述齐次方程,可得两线性无关的解向量为:,所以即其基本矩阵为;状态转移矩阵为:1-17 证明:由题设我们可知故,得证。
1-19 证明:由题设可知:由上式可推出又由及习题1-17的结论可推出由以上两个结论,我们可得到 所以得证。
即 得证。
1-20 解:设其等价变换为,则可知: 由于P 是非奇异矩阵,所以。
1-24 解:易知,其中为严格真有理函数矩阵,进行下列计算: ,则所以因此,可得一个实现如下: 其模拟图如下所示。
1-25 证明:由题设知同理可知若要使得两系统零状态等价,则要满足,即满足 ,得证。
2-2 解: a,由题设可知:[]315 1 7- 1 1 1-7- 1 1 1- 1 0 1 1- 10 0 1 B A AB B 2=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=rank rank ,所以系统可控; 30 2 2 8- 14- 8-1- 3- 2-4 4 2 1 2 1 1- 10 2=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡rank CA CA C rank ,所以系统可观。
b,[]x c c c y u x x 0 1 1 0 0 1 1 0 0 0 1 0 0 1 1 321=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=•由题设可知:[]30 1 0 1 1 0 1 0 1 1 01 A B 2=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡==rank B rank rankB ,所以系统可控; (1)若0321===c c c ,则系统不可观;(2)若321c c c ,,中至少有一个不等于零,则3 2 CA CA C 321132113212≠⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡c c c c c c c c c c c rank rank ,所以系统不可观; 总之,该系统不可观。
线性系统理论(2011)

五、(20 分) 已知单输入单输出线性定常系统 1 A1 x1 b1u 2 A2 x2 b2u x x S1 : S2 : y1 c1 x1 y2 c2 x2 其中, x1 , x2 R n 。它们完全能控能观。将它们并联构成组合 系统 S,输入为 u,输出为 y = [y统 0 1 0 x x u , y 1 0 x 1 0 1 给定参考信号 y0(t)的结构特性为 s-1,扰动信号 w(t)的结构特 性为 s+2。试设计渐近跟踪控制率,并将闭环系统极点配置为 -1,-2,-3。
一、(20 分) 考虑如下机械系统
其中 k 为弹簧系数,c 为阻尼系数,m 为质量,u(t)为作用于 质量的外力,y(t)为质量相对于平衡位置的位移。选取 u(t)为 系统输入,y(t)为系统输出。建立图中所示机械系统的状态方 0 1, y 程与输出方程; 如 k=2, c=3, m=1, 且初始值为 y(0)=0, 写出零输入情况下系统的输出响应。
S 是否总是完全能控,是否总是完全能观?若是,证明之;若 不是,举反例验证之。
二、(20 分) 考虑线性时变系统 1 et 0 x x u , t 0, y 1 0 x 1 0 1 该系统是否 Lyapunov 意义下稳定?是否渐近稳定?为什么?
三、(20 分) 已知线性定常系统 1 1 0 0 0 1 0 x 1 u x 0 0 1 0 能否找到状态反馈,将闭环极点配置到(1)-1,-1,-1; (2) -2,-2,-2。若能,确定状态反馈 K。
线性系统参考题(三)

线性系统参考题(三)一、线性系统的脉冲响应为()t t g t e e -=-。
该系统是一个完全能控系统,它的状态方程有三个极点,其中一个是-2。
(1)求出该系统的传递函数; (2)求出该系统的最小实现;(3)求出该系统的三阶能控标准型,这一实现与原系统的状态方程有何关系?为什么? (4)求出该系统的三阶能观标准型,这一实现与原系统的状态方程有何关系?为什么?二、系统状态方程如下:0011[10]x x y x⎡⎤=⎢⎥-⎣⎦= (1)判断该系统的能观性。
(2)能否设计一个观测器渐近估计系统的状态(即当时间趋向无穷时,估计误差趋向零)? (3)求出系统矩阵的特征向量;(4)若系统的厨师状态分别为0(0)1x α⎡⎤=⎢⎥⎣⎦和1(0)1x β⎡⎤=⎢⎥⎣⎦,求出相应的系统响应并说明这两个响应的特点;(5)已知系统的初始状态为1(0)1x β⎡⎤=⎢⎥⎣⎦,是否可通过测量输出完全确定系统的状态信息?三、系统的传递函数矩阵如下:2211(1)()102s s G s s ⎡⎤+⎢⎥+⎢⎥=⎢⎥⎢⎥+⎣⎦ (1)求出该系统的零点和它们相应的左右方向向量; (2)求出该系统的最小实现;(3)对于该系统是否有不为零的输入能使得输出恒等于零?若是,则写出相应的输入信号,并给出能使输出信号为零的条件;(4)在什么样的输入信号下,系统的输出不为零,但是输出的终值为零?四、考虑线性系统010*********[101]xx u y x⎡⎤⎡⎤⎢⎥⎢⎥=--+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦=其中u 是控制信号,y 是系统的输出。
(1)判断该系统的能控、能观性;(2)设计一状态反馈使得系统传递函数有一对稳定的复数根,其实部为-5,2;(3)分析在初始状态不为零时,确定系统输出性能的关键因数是什么? (5)设计一个基于状态观测器的反馈系统;(5)画出相应的系统结构图。
参考答案一、解:(1)112()[()]11(1)(1)G s L g t s s s s ==-=-+-+(2)我们可以采用基于分式分解的约当形实现11()11G s s s =--+可直接得出状态空间描述:[]11221210101111xx u x x x y x ⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤=⎢⎥⎣⎦此实现为系统最小实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为非奇异,可进行解耦。
则有
(四)全维状态观测器算法: 1.计算对偶系数矩阵 A = AT , B = CT 2.设 K = [k11,k12,...k1n ] ,由α (s)=det(sI-A + BK)=sn + k11sn−1 + ... + k1n 及 α *(s)= ∏ (s-λi*)=α (s) 求得 K
5.计算变换矩阵
6.求Q=P-1 7. 所求增益矩阵 K = KQ
(二)多输入极点配置算法:
则系统的原点平衡状态是大范围渐近稳定。
李亚普诺夫判据:
线性定常系统的零平衡状态Xe =0为渐近稳定的充分必要条件,是
对任意给定的一个正定对称矩阵,如下形式的李பைடு நூலகம்普诺夫矩阵方程:
ATP+PA=-Q
有唯一正定对称矩阵解P。
第二章 线性系统的状态空间描述
(一):例1:下图所示简单电路,电路各组成元件的参数为已知,输入 变量取为电压源e(t),输出变量取为电阻R2的端电压Ur2.
(二):一个单输入—单输出线性定常系统,令y和u分别为其输出变量 和输入变量,则可用单变量的高阶微分方程来描述:
解:确定状态变量,最多2个线性无关的变量,取Uc和 iL 作为状态变量。
或传递函数 m<n(严真情)
m=n(真情)
特征多项式:a(s)= det(sI-A)= sn + an−1sn−1 + ... + a1s + a0
特征矩阵:(sI-A)
预解矩阵: (sI − A)−1
特征值定义为特征方程 det(sI-A)=0 的根
(三)状态方程的约当规范型:
由状态空间描述导出传递函数矩阵:G(s)=C(sI-A)-1B+D 系统状态空间描述在坐标变换下的特性:A=P-1AP,B=P-1B,C=CP,D=D
(一)能控秩判据: 约当规范形判矩:线性定常系统为完全能控的充分必要条件是: ⑴当矩阵A的特征值为两两相异时,对角线规范形
中, B 不包含元素全为零的行。 ⑵当矩阵A的特征值为 λ 1(σ 1重), λ 2(σ 2重)… λ l(σ l重) 且(σ 1+σ 2+…+σ l)=n时,约当规范形
其中
定出 都是行线性无关的,完全能控。
例:给定连续时间的定常系统: 易知,x1=0和x2=0为其唯一的平衡状态. 现取V(x)为状态的一个二次型
V(x)为正定。
V(x) 为负定。
此系统的原点平衡状态是大范围渐近稳定的。 结论3:定常系统,如果存在一个具有连续一阶导数的标量函数V(x), V(0)=0,并且对状态空间X中的一切非零点x满足如下的条件: (1)V(x)为正定。
第5章 线性反馈系统的时间域综合
(一)单输入极点配置算法: 1.判断(A,b)能控性。 2.计算A的特征多项式 3.计算由期望闭环特征值所决定的特征多项式
4.计算 k = [a0* − a0 ,...an*−1 − an−1]
解:先求出 期望的闭环系统矩阵应为:
利用矩阵A和上述得到的矩阵(A-BK),可得
3.取L= K T 4.求(A-LC)
5.全维观测器为: xˆ = ( A − LC)xˆ + Bu + Ly
第七章 线性系统的复频域理论
线性系统的复频域理论,是以传递函数矩阵作为系统描述。 现代复频域理论的特点是,采用传递函数的矩阵分式描述作为系统 数学模型,并以多项式矩阵方法作为系统分析和综合的基本工具。
(二)能观测性秩判据:
约当规范形判矩:
(三)能控规范形: 特征多项式为
构造如下的变换阵
可导出其能控规范形为: 其中:
(四)能观测规范形: 特征多项式为:
变换阵为:
其中:
(五)线性系统的结构分解: (按能控性的结构分解)
(按能观测性的结构分解)
系统结构按能观测性分解的规范形表达式
第4章 系统运动的稳定性
子系统的并联:
子系统的串联:
子系统的反馈联接:
第三章 线性系统的运动分析
(一)矩阵指数函数的算法: 1.特征值法: A的n个特征值为两两相异, P = [v1v2....vn ]为特征向量组成的矩阵
2.预解矩阵法:
(二)零初态响应: 系统的状态运动规律:
第4章 线性系统的能控性与能观测性
能控性:状态是否可由输入影响 线性时变系统,如果对取定初始时刻,t0∈ J的一个非零初始状态x0,
存在一个时刻t1∈ J,t1>t0,和一个无约束的容许控制u(t),t∈ [t0,t1],使状态由x0 转移到x(t1)=0,则称此是在时刻t0为能控的。 能观测性:状态是否可由输出反映。
线性时变系统,如果对取定初始时刻,t0∈ J的一个非零初始状态x0, 存在一个有限时刻t1∈ J,t1>t0,使对所有t ∈ [t0,t1],有y(t)=0,则称此x0在时 刻t0是不能观测的。
李亚普诺夫主稳定性定理: 对于定常系统,如果存在一个具有连续一阶导数的标量函数
V(x),V(0)=0,并且对状态空间X中的一切非零点x满足如下的条件: (1)V (x)为正定。 (2)V(x) = dV (x) / dt 为负定。 (3)当 x → ∞ 时,有V (x) → ∞ 则系统的原点平衡状态是大范围渐近稳定。
(三)可解耦条件和算法:
第1步:计算{di, i=1,2, …p}和
第2步: 若是,可解耦,进入下一步。若否,不能解耦。
第3步:计算E-1和
第4步:取
为:
导出积分型解耦系统 例:给定双输入—双输出的线性定常受控系统为:
解:系统能控且能观测。
②判断可解耦性 可解耦性判别矩阵: ③导出积分型解耦系统 定出