常用数字滤波算法共24页
10种简单的数字滤波算法(C语言源程序)

10种简单的数字滤波算法(C语言源程序)假定从8位AD中读取数据(如果是更高位的AD可定义数据类型为int),子程序为get_ad();1、限副滤波/* A值可根据实际情况调整value为有效值,new_value为当前采样值滤波程序返回有效的实际值*/#define A 10char value;char filter(){char new_value;new_value = get_ad();if ( ( new_value - value > A ) || ( value - new_value > A )return value;return new_value;}2、中位值滤波法/* N值可根据实际情况调整排序采用冒泡法*/#define N 11char filter(){char value_buf[N];char count,i,j,temp;for ( count=0;count<n;count++)< p="">{value_buf[count] = get_ad();delay();for (j=0;j<n-1;j++)< p="">{for (i=0;i<n-j;i++)< p="">{if ( value_buf[i]>value_buf[i+1] ){temp = value_buf[i];value_buf[i] = value_buf[i+1];value_buf[i+1] = temp;}}}return value_buf[(N-1)/2];}3、算术平均滤波法*/#define N 12char filter(){int sum = 0;for ( count=0;count<n;count++)< p=""> {sum + = get_ad();delay();}return (char)(sum/N);}4、递推平均滤波法(又称滑动平均滤波法)/*#define N 12char value_buf[N];char i=0;char filter(){char count;int sum=0;value_buf[i++] = get_ad();if ( i == N ) i = 0;for ( count=0;count<n,count++)< p="">sum = value_buf[count];return (char)(sum/N);}5、中位值平均滤波法(又称防脉冲干扰平均滤波法)/* */#define N 12char filter(){char count,i,j;char value_buf[N];int sum=0;for (count=0;count<n;count++)< p="">{value_buf[count] = get_ad();delay();}for (j=0;j<n-1;j++)< p="">for (i=0;i<n-j;i++)< p="">{if ( value_buf[i]>value_buf[i+1] ){temp = value_buf[i];value_buf[i] = value_buf[i+1];value_buf[i+1] = temp;}}}for(count=1;count<n-1;count++)< p="">sum += value[count];return (char)(sum/(N-2));}6、限幅平均滤波法/**/略参考子程序1、37、一阶滞后滤波法/* 为加快程序处理速度假定基数为100,a=0~100 */ #define a 50char value;char filter(){char new_value;new_value = get_ad();return (100-a)*value + a*new_value;}8、加权递推平均滤波法/* coe数组为加权系数表,存在程序存储区。
常见数字滤波技术与原理

常见数字滤波技术与原理数字滤波技术是一种在数字信号处理中广泛应用的技术。
它通过在数字信号中加入一些特定的滤波器,以减少噪声、平滑信号或提取特定特征。
数字滤波器通常由数字信号处理软件或硬件实现,具有精度高、稳定性好、易于编程等优点。
常见的数字滤波技术包括移动平均滤波、滑动窗口滤波、傅里叶变换滤波等。
1. 移动平均滤波移动平均滤波是一种简单而有效的数字滤波方法。
它通过计算输入信号在一定时间窗口内的平均值,以平滑信号中的噪声。
移动平均滤波器通常由一个滑动窗口和一个累加器组成,窗口内的数据逐个进入累加器,并输出窗口内的平均值。
移动平均滤波器适用于消除随机噪声和周期性噪声。
2. 滑动窗口滤波滑动窗口滤波是一种基于滑动窗口的数字滤波方法。
它通过将输入信号分成多个固定长度的窗口,并对每个窗口内的数据进行处理,以提取特定特征或平滑噪声。
滑动窗口滤波器通常由一个滑动窗口和一个处理函数组成,窗口内的数据逐个进入处理函数,并输出处理结果。
滑动窗口滤波器适用于提取信号中的特定特征或平滑信号中的噪声。
3. 傅里叶变换滤波傅里叶变换滤波是一种基于傅里叶变换的数字滤波方法。
它通过将输入信号从时域转换到频域,以提取信号中的特定频率成分或消除特定频率成分。
傅里叶变换滤波器通常由一个傅里叶变换和一个逆傅里叶变换组成,输入信号经过傅里叶变换后得到频谱图,然后通过逆傅里叶变换将频谱图转换回时域。
傅里叶变换滤波器适用于提取信号中的特定频率成分或消除特定频率成分。
以上是常见数字滤波技术与原理的简要介绍。
在实际应用中,需要根据具体需求选择合适的数字滤波技术,以达到最佳的信号处理效果。
数字滤波方法

数字滤波方法由于工业生产的现场环境非常恶劣,各种干扰源很多,计算机系统通过输入通道采集到的数据信号,虽经硬件电路的滤波处理,但仍会混有随机干扰噪声。
因此,为了提高系统性能,到达准确的测量与控制,一般情况下还需要开展数字滤波。
数字滤波,就是计算机系统对输入信号采样多次,然后用某种计算方法开展数字处理,以削弱或滤除干扰噪声造成的随机误差,从而获得一个真实信号的过程。
这种滤波方法只是根据预定的滤波算法编制相应的程序,实质上是一种程序滤波。
因而可靠性高,稳定性好,修改滤波参数也容易,而且一种滤波子程序可以被多个通道所共用,因而成本很低。
另外,数字滤波可以对各种干扰信号,甚至极低频率的信号开展滤波。
它的缺陷之处是需要占用CPU的机时。
总之,数字滤波与硬件滤波器相比优点甚多,因此得到了普遍的应用。
常用的数字滤波方法有:平均值滤波、中值滤波、限幅滤波和惯性滤波等。
一、平均值滤波平均值滤波就是对多个采样值开展平均算法,这是消除随机误差最常用的方法。
具体又可分为如下几种。
1.算术平均滤波算术平均滤波是在采样周期T内,对测量信号y 开展m 次采样,把m个采样值相加后的算术平均值作为本次采样的有效值。
采样次数m决定了信号的平滑度和灵敏度。
提高m的值,可提***滑度,但系统的灵敏度随之降低,采样次数m 的取值随被控对象的不同而不同。
一般情况下,流量信号可取10左右,压力信号可取4左右,温度、成分等缓变信号可取2甚至不开展算术平均。
在编制算法程序时,m一般取2、4、8等2的整数幂,以便于用移位来代替除法求得平均值。
这种算法适用于存在周期性干扰的信号滤波2.去极值平均滤波算术平均滤波不能将明显的偶然的脉冲干扰消除,只是把其平均到采样结果中,从而降低了测量精度。
去极值平均滤波是对连续采样的m个数据开展比较,去掉其中的最大值与最小值,然后计算余下的m-2个数据的算术平均值。
在编制算法程序时,为便于用移位来代替除法求得平均值,m-2应取2、4、8等,故m取4、6、10等。
10种简单的数字滤波算法
10种简单的数字滤波算法(C语言源程序) 假定从8位AD中读取数据(如果是更高位的AD可定义数据类型为int),子程序为get_ad();1、限副滤波/* A值可根据实际情况调整value为有效值,new_value为当前采样值滤波程序返回有效的实际值*/#define A 10char value;char filter(){char new_value;new_value = get_ad();if ( ( new_value - value > A ) || ( value - new_value > A )return value;return new_value;}2、中位值滤波法/* N值可根据实际情况调整排序采用冒泡法*/#define N 11char filter(){char value_buf[N];char count,i,j,temp;for ( count=0;count<N;count++){value_buf[count] = get_ad();delay();}for (j=0;j<N-1;j++){for (i=0;i<N-j;i++){if ( value_buf[i]>value_buf[i+1] ){temp = value_buf[i];value_buf[i] = value_buf[i+1];value_buf[i+1] = temp;}}}return value_buf[(N-1)/2];}3、算术平均滤波法/**/#define N 12char filter(){int sum = 0;for ( count=0;count<N;count++){sum + = get_ad();delay();}return (char)(sum/N);}4、递推平均滤波法(又称滑动平均滤波法)/**/#define N 12char value_buf[N];char i=0;char filter(){char count;int sum=0;value_buf[i++] = get_ad();if ( i == N ) i = 0;for ( count=0;count<N,count++)sum = value_buf[count];return (char)(sum/N);}5、中位值平均滤波法(又称防脉冲干扰平均滤波法)/**/#define N 12char filter(){char count,i,j;char value_buf[N];int sum=0;for (count=0;count<N;count++){value_buf[count] = get_ad();delay();}for (j=0;j<N-1;j++){for (i=0;i<N-j;i++){if ( value_buf[i]>value_buf[i+1] ){temp = value_buf[i];value_buf[i] = value_buf[i+1];value_buf[i+1] = temp;}}}for(count=1;count<N-1;count++)sum += value[count];return (char)(sum/(N-2));}6、限幅平均滤波法/**/略参考子程序1、37、一阶滞后滤波法/* 为加快程序处理速度假定基数为100,a=0~100 */#define a 50char value;char filter(){char new_value;new_value = get_ad();return (100-a)*value + a*new_value;}8、加权递推平均滤波法/* coe数组为加权系数表,存在程序存储区。
11种滤波算法及程序
11种滤波算法及程序十一种滤波算法及程序1 概述数字滤波方法有很多种,每种方法有其不同的特点和使用范围。
从大的范围可分为3 类。
1.1 克服大脉冲干扰的数字滤波法克服由仪器外部环境偶然因素引起的突变性扰动或仪器内部不稳定引起误码等造成的尖脉冲干扰,是仪器数据处理的第一步。
通常采用简单的非线性滤波法。
㈠.限幅滤波法㈡.中值滤波法1.2 抑制小幅度高频噪声的平均滤波法小幅度高频电子噪声:电子器件热噪声、A/D 量化噪声等。
通常采用具有低通特性的线性滤波器:算数平均滤波法、加权平均滤波法、滑动加权平均滤波法一阶滞后滤波法等。
㈠.算数平均㈡.滑动平均㈢.加权滑动平均㈣一阶滞后滤波法1.3 复合滤波法在实际应用中,有时既要消除大幅度的脉冲干扰,有要做到数据平滑。
因此常把前面介绍的两种以上的方法结合起来使用,形成复合滤波。
去极值平均滤波算法:先用中值滤波算法滤除采样值中的脉冲性干扰,然后把剩余的各采样值进行平均滤波。
连续采样N 次,剔除其最大值和最小值,再求余下N-2 个采样的平均值。
显然,这种方法既能抑制随机干扰,又能滤除明显的脉冲干扰。
2 十一种通用滤波算法2.1 限幅滤波法(又称程序判断滤波法)根据经验判断,确定两次采样允许的最大偏差值(设为A)每次检测到新值时判断:如果本次值与上次值之差<=A,则本次值有效如果本次值与上次值之差>A,则本次值无效,放弃本次值,用上次值代替本次值B、优点:能有效克服因偶然因素引起的脉冲干扰C、缺点无法抑制那种周期性的干扰平滑度差2.2 中位值滤波法A、方法:连续采样N 次(N 取奇数)把N 次采样值按大小排列取中间值为本次有效值B、优点:能有效克服因偶然因素引起的波动干扰对温度、液位的变化缓慢的被测参数有良好的滤波效果C、缺点:对流量、速度等快速变化的参数不宜2.3 算术平均滤波法A、方法:连续取N 个采样值进行算术平均运算N 值较大时:信号平滑度较高,但灵敏度较低N 值较小时:信号平滑度较低,但灵敏度较高N 值的选取:一般流量,N=12;压力:N=4B、优点:适用于对一般具有随机干扰的信号进行滤波这样信号的特点是有一个平均值,信号在某一数值范围附近上下波动对于测量速度较慢或要求数据计算速度较快的实时控制不适用比较浪费RAM2.4 递推平均滤波法(又称滑动平均滤波法)A、方法:把连续取N 个采样值看成一个队列队列的长度固定为N每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据.(先进先出原则)把队列中的N 个数据进行算术平均运算,就可获得新的滤波结果N 值的选取:流量,N=12;压力:N=4;液面,N=4~12;温度,N=1~4 B、优点:对周期性干扰有良好的抑制作用,平滑度高适用于高频振荡的系统C、缺点:灵敏度低对偶然出现的脉冲性干扰的抑制作用较差不易消除由于脉冲干扰所引起的采样值偏差不适用于脉冲干扰比较严重的场合比较浪费RAM2.5 中位值平均滤波法(又称防脉冲干扰平均滤波法)A、方法:相当于“中位值滤波法” +“算术平均滤波法”连续采样N 个数据,去掉一个最大值和一个最小值然后计算N-2 个数据的算术平均值N 值的选取:3~14B、优点:融合了两种滤波法的优点对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差C、缺点:测量速度较慢,和算术平均滤波法一样比较浪费RAM2.6 限幅平均滤波法A、方法:相当于“限幅滤波法” +“递推平均滤波法”每次采样到的新数据先进行限幅处理,再送入队列进行递推平均滤波处理B、优点:融合了两种滤波法的优点对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差C、缺点:比较浪费RAM2.7 一阶滞后滤波法A、方法:取a=0~1本次滤波结果=(1-a)*本次采样值+a*上次滤波结果B、优点:对周期性干扰具有良好的抑制作用适用于波动频率较高的场合C、缺点:相位滞后,灵敏度低滞后程度取决于a 值大小不能消除滤波频率高于采样频率的1/2 的干扰信号2.8 加权递推平均滤波法A、方法:是对递推平均滤波法的改进,即不同时刻的数据加以不同的权通常是,越接近现时刻的数据,权取得越大。
数字滤波常用算法及例程

做DSP最应该懂得57个问题2007-12-10 9:15:00一.什么是DSP?(缺省)二.DSP的C语言同主机C语言的主要区别?1)DSP的C语言是标准的ANSI C,它不包括同外设联系的扩展部分,如屏幕绘图等。
但在CC S中,为了方便调试,可以将数据通过prinf命令虚拟输出到主机的屏幕上。
2)DSP的C语言的编译过程为,C编译为ASM,再由ASM编译为OBJ。
因此C和ASM的对应关系非常明确,非常便于人工优化。
3)DSP的代码需要绝对定位;主机的C的代码有操作系统定位。
4)DSP的C的效率较高,非常适合于嵌入系统。
三.DSP发展动态1.TMS320C2000 TMS320C2000系列包括C24x和C28x系列。
C24x系列建议使用LF24xx 系列替代C24x系列,LF24xx系列的价格比C24x便宜,性能高于C24x,而且LF24xxA具有加密功能。
C28x系列主要用于大存储设备管理,高性能的控制场合。
2.TMS320C3x TMS320C3x系列包括C3x和VC33,主要推荐使用VC33。
C3x系列是TI浮点DSP的基础,不可能停产,但价格不会进一步下调。
3.TMS320C5x TMS320C5x系列已不推荐使用,建议使用C24x或C5000系列替代。
4.TMS320C5000 TMS320C5000系列包括C54x和C55x系列。
其中VC54xx还不断有新的器件出现,如:TMS320VC5471(DSP+ARM7)。
C55x系列是TI的第三代DSP,功耗为VC54xx的1/6,性能为VC54xx的5倍,是一个正在发展的系列。
C5000系列是目前TI DSP的主流DSP,它涵盖了从低档到中高档的应用领域,目前也是用户最多的系列。
5.TMS320C6000 TMS320C6000系列包括C62xx、C67xx和C64xx。
此系列是TI的高档D SP系列。
其中C62xx系列是定点的DSP,系列芯片种类较丰富,是主要的应用系列。
数字滤波常用方法(带程序)
引言在微机控制系统的模拟输入信号中,一般均含有各种噪声和干扰,他们来自被测信号源本身、传感器、外界干扰等。
为了进行准确测量和控制,必须消除被测信号中的噪声和干扰。
噪声有2大类:一类为周期性的,其典型代表为50 Hz的工频干扰,对于这类信号,采用积分时间等于20 ms整倍数的双积分A/D转换器,可有效地消除其影响;另一类为非周期的不规则随机信号,对于随机干扰,可以用数字滤波方法予以削弱或滤除。
所谓数字滤波,就是通过一定的计算或判断程序减少干扰信号在有用信号中的比重,因此他实际上是一个程序滤波。
数字滤波器克服了模拟滤波器的许多不足,他与模拟滤波器相比有以下优点:(1)数字滤波器是用软件实现的,不需要增加硬设备,因而可靠性高、稳定性好,不存在阻抗匹配问题。
(2)模拟滤波器通常是各通道专用,而数字滤波器则可多通道共享,从而降低了成本。
(3)数字滤波器可以对频率很低(如0.01 Hz)的信号进行滤波,而模拟滤波器由于受电容容量的限制,频率不可能太低。
(4)数字滤波器可以根据信号的不同,采用不同的滤波方法或滤波参数,具有灵活、方便、功能强的特点。
10种软件滤波方法的示例程序(JKRL)假定从8位AD中读取数据(如果是更高位的AD可定义数据类型为int),子程序为get_ad();1、限副滤波A、方法:根据经验判断,确定两次采样允许的最大偏差值(设为A),每次检测到新值时判断:如果本次值与上次值之差<=A,则本次值有效。
如果本次值与上次值之差>A,则本次值无效,放弃本次值,用上次值代替本次值B、优点:能有效克服因偶然因素引起的脉冲干扰。
C、缺点:无法抑制那种周期性的干扰,平滑度差。
/* A值可根据实际情况调整value为有效值,new_value为当前采样值滤波程序返回有效的实际值*/#define A 10char value;char filter(){char new_value;new_value = get_ad();if ( ( new_value - value > A ) || ( value - new_value > A )return value;return new_value;}2、中位值滤波法A、方法:连续采样N次(N取奇数),把N次采样值按大小排列,取中间值为本次有效值。
数字信号处理中的滤波算法

数字信号处理中的滤波算法在数字信号处理领域中,滤波算法是一种广泛应用的技术,用于处理信号中的噪声、干扰以及其他所需的频率响应调整。
滤波算法通过改变信号的频谱特性,实现信号的增强、去噪和频率分析等功能。
本文将介绍几种常见的数字信号处理中的滤波算法,包括低通滤波、高通滤波、带通滤波和带阻滤波。
一、低通滤波算法低通滤波算法是一种常见的滤波算法,用于去除高频信号成分,保留低频信号。
该算法通过选择适当的截止频率,将高于该频率的信号部分进行衰减。
常见的低通滤波算法有巴特沃斯滤波器、滑动平均滤波器和无限脉冲响应滤波器(IIR)等。
巴特沃斯滤波器是一种常见的无波纹、无相位失真的低通滤波器。
它通过设计适当的传递函数,实现对高频信号的衰减。
巴特沃斯滤波器的特点是具有平滑的频率响应曲线和较好的陡峭度。
滑动平均滤波器是一种简单的低通滤波算法。
它通过取信号一段时间内的平均值,实现对高频成分的平滑处理。
滑动平均滤波器适用于对周期性干扰信号的去噪,以及对信号进行平滑处理的场景。
无限脉冲响应滤波器(IIR)是一种递归滤波器,具有较高的计算效率和频率选择能力。
IIR滤波器通过对输入信号和输出信号进行递推计算,实现对高频信号的衰减和滤除。
然而,在一些特殊应用场景中,IIR滤波器可能会引入稳定性和相位失真等问题。
二、高通滤波算法与低通滤波相反,高通滤波算法用于去除低频信号成分,保留高频信号。
高通滤波算法通常用于信号的边缘检测、图像锐化和音频增强等处理。
常见的高通滤波算法有巴特沃斯滤波器、无限脉冲响应滤波器和基于梯度计算的滤波器等。
巴特沃斯滤波器同样适用于高通滤波。
通过设计适当的传递函数,巴特沃斯滤波器实现对低频信号的衰减,保留高频信号。
巴特沃斯高通滤波器的特点是具有平滑的频率响应曲线和较好的陡峭度。
无限脉冲响应滤波器同样具有高通滤波的功能。
通过对输入信号和输出信号进行递推计算,IIR滤波器实现对低频信号的衰减和滤除。
然而,IIR滤波器在一些特殊应用场景中可能引入稳定性和相位失真等问题。
常用的滤波算法
常⽤的滤波算法滤波是传感器处理中的重要算法,经常接触底层常常⽤到,以下总结了⼀些滤波算法,供以后参考调⽤。
⼀、低通滤波1.1RC滤波的数字低通滤波 指在截⽌频率fc的时候,增益为-3db(Aup=0.707)的滤波器,也是模电书中出现的第⼀种硬件滤波器,以下是对应的软件形式的1阶RC 滤波器的数字形式(本断程序节选⾃匿名4轴) ⼀阶形式:Y(n)=(1-a)*Y(n-1)+a*X(n) 下式中 oldData表⽰上⼀次的输出Y(n-1) newData表⽰新的输⼊X(n)1 float LopPassFilter_RC_1st(float oldData, float newData, float a)2 {3 return oldData * (1 - a) + newData * a;4 }56 计算⽐例系数a:78 float LopPassFilter_RC_1st_Factor_Cal(float deltaT, float Fcut)9 {10 return deltaT / (deltaT + 1 / (2 * M_PI * Fcut));11 }1.2均值滤波: 把⼀段时间内的数据累加后求平均值,达到平滑的作⽤,适⽤性⼴泛,元素越多滤波效果越好时延越⾼。
1 uint16_t LowPassFilter_Average(uint16_t data[],uint16_t length)23 {45 uint32_t add=0;6 uint16_t result;7 int i;89 for(i=0;i<length;i++)10 {11 add += data[i];12 }13 result=add/length;14 return result;15 }1617 //data[]放⼊⼀段时间⾥的数值,length:data数组的长度1.3滑动滤波 在均值滤波的基础上,加上⽐例系数,最新的数据具有更⼤的⽐例,增加时效性。
数字滤波方法
数字滤波方法1、限幅滤波法(又称程序判断滤波法)A、方法:根据经验判断,确定两次采样允许的最大偏差值(设为A)每次检测到新值时判断:如果本次值与上次值之差<=A,则本次值有效如果本次值与上次值之差>A,则本次值无效,放弃本次值,用上次值代替本次值B、优点:能有效克服因偶然因素引起的脉冲干扰C、缺点无法抑制那种周期性的干扰平滑度差2、中位值滤波法A、方法:连续采样N次(N取奇数)把N次采样值按大小排列取中间值为本次有效值B、优点:能有效克服因偶然因素引起的波动干扰对温度、液位的变化缓慢的被测参数有良好的滤波效果C、缺点:对流量、速度等快速变化的参数不宜3、算术平均滤波法A、方法:连续取N个采样值进行算术平均运算N值较大时:信号平滑度较高,但灵敏度较低N值较小时:信号平滑度较低,但灵敏度较高N值的选取:一般流量,N=12;压力:N=4B、优点:适用于对一般具有随机干扰的信号进行滤波这样信号的特点是有一个平均值,信号在某一数值范围附近上下波动C、缺点:对于测量速度较慢或要求数据计算速度较快的实时控制不适用比较浪费RAM4、递推平均滤波法(又称滑动平均滤波法)A、方法:把连续取N个采样值看成一个队列队列的长度固定为N每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据.(先进先出原则)把队列中的N个数据进行算术平均运算,就可获得新的滤波结果N值的选取:流量,N=12;压力:N=4;液面,N=4~12;温度,N=1~4B、优点:对周期性干扰有良好的抑制作用,平滑度高适用于高频振荡的系统C、缺点:灵敏度低对偶然出现的脉冲性干扰的抑制作用较差不易消除由于脉冲干扰所引起的采样值偏差不适用于脉冲干扰比较严重的场合比较浪费RAM5、中位值平均滤波法(又称防脉冲干扰平均滤波法)A、方法:相当于“中位值滤波法”+“算术平均滤波法”连续采样N个数据,去掉一个最大值和一个最小值然后计算N-2个数据的算术平均值N值的选取:3~14B、优点:融合了两种滤波法的优点对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差C、缺点:测量速度较慢,和算术平均滤波法一样比较浪费RAM6、限幅平均滤波法A、方法:相当于“限幅滤波法”+“递推平均滤波法”每次采样到的新数据先进行限幅处理,再送入队列进行递推平均滤波处理B、优点:融合了两种滤波法的优点对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差C、缺点:比较浪费RAM7、一阶滞后滤波法A、方法:取a=0~1本次滤波结果=(1-a)*本次采样值+a*上次滤波结果B、优点:对周期性干扰具有良好的抑制作用适用于波动频率较高的场合C、缺点:相位滞后,灵敏度低滞后程度取决于a值大小不能消除滤波频率高于采样频率的1/2的干扰信号8、加权递推平均滤波法A、方法:是对递推平均滤波法的改进,即不同时刻的数据加以不同的权通常是,越接近现时刻的数据,权取得越大。
数据处理中的几种常用数字滤波算法

・ ,+ ・万方数据
计量技术 !**& 78 +
数据处理中的几种常用数字滤波算法
作者: 作者单位: 刊名: 英文刊名: 年,卷(期): 被引用次数: 王庆河, 王庆山 济钢集团中厚板厂,济南,250101 计量技术 MEASUREMENT TECHNIQUE 2003(4) 29次
引证文献(29条) 1.史步海.孙宗海 混凝沉淀过程机理分析与数据预处理研究[期刊论文]-长春理工大学学报(自然科学版) 2010(1) 2.张燕燕 无线传感器网络中节点的信号处理[期刊论文]-工业控制计算机 2010(2) 3.余发山.宋珊.郑俊锋 基于DSP的称重控制器设计[期刊论文]-自动化技术与应用 2010(1) 4.王红亮.王洋.于君.吕永超 基于TMS320F2812的声信号采集滤波系统设计[期刊论文]-自动化技术与应用 2008(12) 5.张西良.杨伟玲.李萍萍.张世庆 动态称量信号离散小波变换数字滤波处理方法[期刊论文]-农业机械学报 2008(7) 6.史步海.朱学峰.陈锦威 基于先验知识的混凝沉淀过程神经网络建模[期刊论文]-华南理工大学学报(自然科学版 ) 2008(5) 7.赵亚明.张维玲 火电厂煤粉浓度软测量中数据校正技术[期刊论文]-甘肃科技 2008(4) 8.倪锋.佟红霞.李大维 炉前热分析冷却曲线的数字滤波[期刊论文]-铸造设备研究 2006(1) 9.侯达盘.张西良.张世庆 检重机称重信号的数据处理研究[期刊论文]-机械设计与制造 2006(1) 10.周英武.王苏岩.李宏男 结构试验中一种高保真的数字滤波算法[期刊论文]-重庆建筑大学学报 2006(6) 11.张靓 高精度高温超导磁悬浮测试系统的数据采集与控制[学位论文]硕士 2006 12.李学生 基于虚拟仪器的超声检测技术研究[学位论文]硕士 2006 13.刘荣琼 额济纳绿洲植被盖度的双因子系统模型[学位论文]硕士 2006 14.吴虹政 磁力轴承的模糊控制与数字滤法算法研究[学位论文]硕士 2006 15.刘颖 电站锅炉风粉浓度的软测量研究[学位论文]硕士 2006 16.何加锋 基于PCI数据采集卡的虚拟函数记录系统的研究及开发[学位论文]硕士 2006 17.张永强.申利永.田紫君 汽车安全性能检测系统中的软件滤波[期刊论文]-工业仪表与自动化装置 2005(5) 18.向红军.雷彬 基于单片机系统的数字滤波方法的研究[期刊论文]-电测与仪表 2005(9) 19.王舟如 炮塔壳体智能焊接系统的研究与开发[学位论文]硕士 2005 20.申利永 汽车安全性能检测系统软件研究与实现[学位论文]硕士 2005 21.徐娟 压电型超声波数据采集系统的开发与研究[学位论文]硕士 2005 22.黄志杭 用于微热板式气压传感器的数字集成电路设计[学位论文]硕士 2005 23.钟亮 粘料机智能控制系统的研制[学位论文]硕士 2005 24.王东林 小型空气弹簧隔振基础位移控制技术[学位论文]硕士 2005 25.许嘉 汽车动态称重信号分析与处理[学位论文]硕士 2005 26.吴晓亮.张世庆.张西良 混合式动态称重数据处理研究[期刊论文]-包装工程 2004(5) 27.黄剑 基于PCI数据采集卡的虚拟函数记录系统研究及应用[学位论文]硕士 2004 28.高峰 六自由度运动平台伺服系统研究[学位论文]硕士 2004
数字信号滤波公式差分积分法
数字信号滤波公式差分积分法
数字信号滤波是一种处理数字信号的技术,用于去除噪音和不需要的信号成分,以提高信号质量和提取有用信息。
差分积分法是数字信号滤波中常用的一种方法,下面我会从多个角度来解释这个问题。
首先,差分积分法是一种基于差分运算和积分运算的数字滤波方法。
在差分积分法中,首先对输入信号进行差分运算,以提取信号的变化率信息,然后再对差分后的信号进行积分运算,以平滑信号并去除高频噪声。
这种方法可以有效地滤除信号中的高频噪声,同时保留信号的低频成分,适用于需要保留信号整体趋势的应用场景。
其次,差分积分法在数字信号处理中具有较好的稳定性和实现简单的特点。
通过差分运算和积分运算的组合,可以实现对信号的滤波和去噪,同时避免了一些复杂滤波方法中需要考虑的参数选择和系统稳定性等问题。
这使得差分积分法在实际工程应用中具有一定的优势。
此外,差分积分法在实际应用中有多种变体和改进方法,可以
根据具体的信号特点和滤波要求进行调整和优化。
例如,可以通过改变差分和积分的权重系数,设计不同类型的滤波器,以适应不同频率特性的信号滤波需求。
同时,还可以结合其他滤波方法,如滑动窗口滤波、小波变换等,进一步提高滤波效果和适用范围。
总的来说,差分积分法作为数字信号滤波的一种方法,具有一定的优势和适用性,但在实际应用中需要根据具体情况进行调整和优化,以达到最佳的滤波效果。
希望以上解释能够全面回答你的问题。
常用数字滤波算法
已滤波的采样结果: yn 1,yn 2 , yn 1
两次采样值的最大允许误差a.要求准确
估计Vmax和采样周期T。
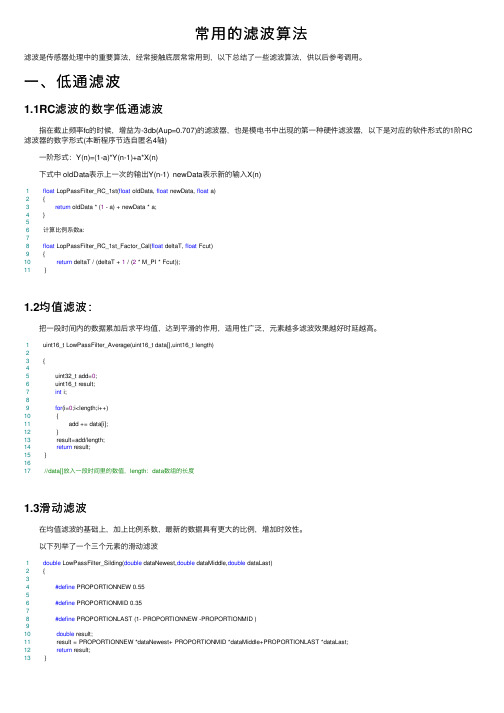
2.中值滤波法
中值滤波是一种典型的非线性滤波器,它运 算简单,在滤除脉冲噪声的同时可以很好地 保护信号的细节信息。
对某一被测参数连续采样n次(一般n应为奇 数),然后将这些采样值进行排序,选取中 间值为本次采样值。
对温度、液位等缓慢变化的被测参数,采用 中值滤波法一般能收到良好的滤波效果。
设滤波器窗口的宽度为n=2k+1,离散时间信号x (i)的长度为N,(i=1,2,…,N;N>>n),
则当窗口在信号序列上滑动时,一维中值滤波 器的输出:
med[x(i)]=x(k) 表示窗口2k+1内排序的第k
个值,即排序后的中间值。
原始信号
中值滤波后的信号
对不同宽度脉冲滤波效果
3.基于拉依达准则的奇异数据滤波法 (剔除粗大误差)
滑动平均滤波法把N个测量数据看成一 个队列,队列的长度固定为N,每进行 一次新的采样,把测量结果放入队尾, 而去掉原来队首的一个数据,这样在 队列中始终有N个“最新”的数据。
Xn
1 N
N 1
Xni
i0
Xn 为第n次采样经滤波后的输出;
X
n
为未经滤波的第n-i次采样值;
i
N为滑动平均项数。
平滑度高,灵敏度低;但对偶然出现的脉冲 性干扰的抑制作用差。实际应用时,通过观 察不同N值下滑动平均的输出响应来选取N值 以便少占用计算机时间,又能达到最好的滤 波效果。
十一种滤波算法及程序

3.10 限幅消抖滤波法 /* */ 略 参考子程序 1、9
3.11 IIR 滤波例子
int BandpassFilter4(int InputAD4) { int ReturnValue; int ii; RESLO=0; RESHI=0;
3.5 /* */
中位值平均滤波法(又称防脉冲干扰平均滤波法)
#define N 12
char filter() { char count,i,j; char value_buf[N]; int sum=0; for (count=0;count<N;count++) { value_buf[count] = get_ad(); delay(); } for (j=0;j<N-1;j++) { for (i=0;i<N-j;i++) { if ( value_buf>value_buf[i+1] ) { temp = value_buf;
3.6 /* */
限幅平均滤波法
略 参考子程序 1、3
3.7
一阶滞后滤波法
/* 为加快程序处理速度假定基数为 100,a=0~100 */
#define a 50
char value;
char filter() { char new_value; new_value = get_ad(); return (100-a)*value + a*new_value; }
第 10 页 / 共 15 页
value_buf = value_buf[i+1]; value_buf[i+1] = temp; } } } for(count=1;count<N-1;count++) sum += value[count]; return (char)(sum/(N-2)); }
滤波算法
常用的8种数字滤波算法2010-02-22 11:081引言在微机控制系统的模拟输入信号中,一般均含有各种噪声和干扰,他们来自被测信号源本身、传感器、外界干扰等。
为了进行准确测量和控制,必须消除被测信号中的噪声和干扰。
噪声有2大类:一类为周期性的,其典型代表为50 Hz的工频干扰,对于这类信号,采用积分时间等于20 ms整倍数的双积分A/D转换器,可有效地消除其影响;另一类为非周期的不规则随机信号,对于随机干扰,可以用数字滤波方法予以削弱或滤除。
所谓数字滤波,就是通过一定的计算或判断程序减少干扰信号在有用信号中的比重,因此他实际上是一个程序滤波。
数字滤波器克服了模拟滤波器的许多不足,他与模拟滤波器相比有以下优点:(1)数字滤波器是用软件实现的,不需要增加硬设备,因而可靠性高、稳定性好,不存在阻抗匹配问题。
(2)模拟滤波器通常是各通道专用,而数字滤波器则可多通道共享,从而降低了成本。
(3)数字滤波器可以对频率很低(如0.01 Hz)的信号进行滤波,而模拟滤波器由于受电容容量的限制,频率不可能太低。
(4)数字滤波器可以根据信号的不同,采用不同的滤波方法或滤波参数,具有灵活、方便、功能强的特点。
2常用数字滤波算法数字滤波器是将一组输入数字序列进行一定的运算而转换成另一组输出数字序列的装置。
设数字滤波器的输入为X(n),输出为Y(n),则输入序列和输出序列之间的关系可用差分方程式表示为:其中:输入信号X(n)可以是模拟信号经采样和A/D变换后得到的数字序列,也可以是计算机的输出信号。
具有上述关系的数字滤波器的当前输出与现在的和过去的输入、过去的输出有关。
由这样的差分方程式组成的滤波器称为递归型数字滤波器。
如果将上述差分方程式中bK取0,则可得:说明输出只和现在的输入和过去的输入有关。
这种类型的滤波器称为非递归型数字滤波器。
参数aK 、bK的选择不同,可以实现低通、高通、带通、带阻等不同的数字滤波器。
2.1算术平均值滤波算术平均值滤波是要寻找一个Y,使该值与各采样值X(K)(K=1~N)之间误差的平方和为最小,即:这时,可满足式(3)。