曲柄滑块机构运动规律
曲柄(导杆)滑块机构设计分析正文.

目录1 引言1.1 选题的依据及意义·························································································(1)1.2 国内外研究概况及发展趋势··········································································(2)1.3 论文主要工作·······························································································(3)2 曲柄(导杆)滑块机构简介····································································(4)3 曲柄(导杆)滑块机构的运动学分析3.1 曲柄导杆滑块机构的运动分析······································································(5)3.1.1 机构装配的条件····················································································(6)3.1.2 建立数学模型·························································································(6)3.1.3 计算机辅助分析及其程序设计······························································(9)3. 2曲柄滑块机构的运动分析3.2.1 机构装配的条件·····················································································(25)3.2.2 建立数学模型·······················································································(25)3.2.3 计算机辅助分析及其程序设计·····························································(27)4 曲柄(导杆)滑块机构实验台装置设计4. 1 实验台结构·································································································(40)4.2 实验台硬件操作说明···················································································(41)4.3 用SolidWorks 2006实现实验台的立体图形················································(42)总结·········································································································(46)参考文献·········································································································(47)致谢·········································································································(48)1 引言1.1 选题的依据及意义1.曲柄(导杆)滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。
曲柄滑块机构设计
中国矿业大学成人高等教育本科毕业设计(论文)任务书学院(函授站)专业班级学生姓名任务下达日期:年月日任务完成日期:年月日毕业设计(论文)题目:曲柄滑块机构设计主要内容和要求:1、曲柄滑块的设计(1)曲柄滑块的组成(2)曲柄滑块的运动规律(3)曲柄滑块机构的的特性分析(4)计算滑块的运动范围(5)画出曲柄滑块的轮廓图(6)设计、绘制草图(7)各部件的连接设计2、机构的加工(1)机架的加工工艺分析(2)机架的加工程序3、零件图4、装配图5、参考资料院长(函授站站长)签字:指导教师签字:机械工程(函授)毕业设计指导书一、毕业设计的目的1、通过设计使学生综合运用有关课程的知识,巩固、深化、扩展有关机械设计方面的知识,树立正确的设计思想。
2、培养学生分析和解决工程实际问题的能力,使学生掌握简单机械的一般设计方法和步骤。
3、提高学生的有关设计能力,如计算能力、绘图能力等,使学生熟悉设计资料的使用,掌握经验估算等机械设计的基本技能。
4、掌握NC典型零件的加工方法二、设计内容:设计一对心曲柄滑块机构,曲柄滑块机构的结构图如下:图1 曲柄滑块机构三、原始数据A=400、B=120、C=240四、设计要求:1、采用无纸化绘制出曲柄滑块机构的总装图和零件图,零件图数量不得少于五张。
2、编写二到三个典型零件的加工工艺和CNC加工程序。
3、编写设计任务书一套。
五、设计内容和步骤本次设计分为三个阶段,计划在三个月内完成,各阶段的设计内容和步骤如下:第一阶段:1、设计准备工作(1)熟悉任务书,明确设计的内容和要求;(2)熟悉设计指导书,有关资料、图纸等。
2、总体设计(1)初步确定各部件结构、尺寸;(2)绘制各部件草图;第二阶段:3、零件图的绘制4、装配图的绘制第三阶段:5、编制数控加工程序6、总结写出设计总结,包括课题完成情况,以及个人收获体会。
8、答辩(1)作好答辩准备(概述自己设计的思路和过程,设计的特点);(2)参加答辩(包括个人陈述和答辩组老师提问)。
常见的回转 直线运动转换的机构
常见的回转直线运动转换的机构常见的回转直线运动转换的机构摘要:实际的机器当中,往往需要用到回转运动与直线运动之间的相互转换,本文介绍了能实现此功能的几种常见机构,分别是曲柄滑块机构、凸轮机构、齿轮齿条机构和滚珠丝杠机构,并说明了各自的特点及在实际中的应用。
关键词:回转运动;直线运动;机构1 曲柄连杆机构1.1 曲柄滑块机构定义在普通四杆机构中,四个构件之间都是通过转动副连接,这样可以实现曲线与曲线运动之间的转换。
而曲柄滑块机构是保存曲柄杆、中间杆和固定杆,将另一根杆退化为滑块,使滑块与中间连杆用转动副连接,滑块与固定杆用移动副连接,这样就可以实现曲柄端的回转运动与滑块端的直线运动相互转化。
1.2 曲柄滑块机构的特点及应用1.2.1 优点①低副连接,运动副单位面积受力小,便于润滑,磨损小;②对于长距离的控制也可以实现;③构件之间的运动靠几何封闭来维系,比力封闭的可靠。
1.2.2 缺点①结构设计较复杂,且对制造安装的敏感性大;②高速时将引起很大的振动和动载荷。
1.2.3 应用曲柄滑块机构在机械中的应用很广泛,例如,内燃机通过活塞往复运动将内能转换为曲柄转动的机械能;压力机结构中通过曲柄的连续转动,经连杆带动滑块实现加压作用;牛头刨床主运动机构中,导杆绕一点摆动,带动滑枕做往复运动,实现刨削;抽水机结构中,摇动手柄时,在连杆的支承下,活塞杆在筒内做上下运动,以到达抽水目的。
另外,工程中的搓丝机、自动送料装置及自卸翻斗装置等机械中都用到曲柄滑块机构。
2 凸轮机构2.1 凸轮机构的组成和特点凸轮机构是由凸轮、从动件和机架三个局部组成,其中凸轮是主动件,从动件的运动规律由凸轮的轮廓决定。
凸轮是具有曲线轮廓或沟槽的构件,假设从动件是移动构件,那么这样的凸轮机构便能实现回转运动、直线运动的转换。
凸轮机构特点是:①可以用于对从动件任意运动规律要求的场合;②可以高速启动,动作准确可靠,结构简单紧凑;③凸轮和从动件以点或线接触,单位面积上压力高,难以保持良好的润滑,易磨损;④凸轮形状复杂,加工维修较困难。
曲柄滑块工作机构课程设计
摘要曲柄压力机广泛应用于冲裁,弯曲,校正,模具冲压等工作。
本次设计的为开式固定台式中型,公称压力为1600KN曲柄压力机。
本设计主要进行该曲柄压力机曲柄滑块工作机构的设计。
在设计中,首先根据该压力机要保证的主要技术参数——公称压力、滑块行程等,初步估算曲柄,连杆,滑块,导轨相关尺寸,然后分别对其进行校核,修正,最终确定各零部件尺寸;进行装模高度调节装置设计,并最终完成该曲柄滑块工作机构设计。
关键字:公称压力;曲轴;连杆;导轨;调节装置目录第一章曲柄压力机的工作原理及主要参数 (1)1.1压力机技术参数 (1)1.2 曲柄压力机的工作原理. (1)1.3曲柄压力机工作的特点 (2)1.4 曲柄形式 (2)1.4.1、曲轴驱动的曲柄滑块机构 (3)1.4.2、偏心轴驱动的曲柄滑块机构 (4)1.4.3、曲拐驱动的曲柄滑块机构 (4)1.5.4、偏心齿轮驱动的曲柄滑块机构 (4)1.4.5各种结构的区别及最终确定设计设计思路 (6)第二章曲柄滑块机构的构成及相关分析 (6)2.1压力机曲柄滑块机构的构成 (6)2.2曲柄压力机滑块机构的运动规律分析。
(7)2.2.1滑块的位移和曲柄转角之间的关系 (7)2.2.2滑块的速度和曲柄转角的关系 (8)2.3曲柄压力机滑块机构的受力分析 (9)2.3.1忽略摩擦情况下滑块机构主要构件的力学分析 (9)2.3.2考虑摩擦情况下滑块机构主要构件的力学分析 (10)第三章装模高度调节装置总体设计 (13)3.1装模高度调节设计及电动机的选定 (13)3.1.1 装模高度调节装置构成及工做原理 (13)3.1.2调节装置电动机选定............................ 错误!未定义书签。
第四章齿轮传动......................................... 错误!未定义书签。
4.1 齿轮传动的介绍...................................... 错误!未定义书签。
曲柄滑块机构的运动分析及应用解读

机械原理课程机构设计实验报告题目:曲柄滑块机构的运动分析及应用小组成员与学号:刘泽陆(********)陈柯宇(11071177)熊宇飞(11071174)张保开(11071183)班级:1107172013年6月10日摘要 (3)曲柄滑块机构简介 (4)曲柄滑块机构定义 (4)曲柄滑块机构的特性及应用 (4)曲柄滑块机构的分类 (8)偏心轮机构简介 (9)曲柄滑块的动力学特性 (10)曲柄滑块的运动学特性 (11)曲柄滑块机构运行中的振动与平衡 (14)参考文献 (15)组员分工 (15)摘要本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。
最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。
关键字:曲柄滑块动力与运动分析振动与平稳性ABSTRACTThe paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.曲柄滑块机构简介曲柄滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。
曲柄滑块机构条件(一)
曲柄滑块机构条件(一)曲柄滑块机构条件什么是曲柄滑块机构?曲柄滑块机构是一种常见的机械传动机构,由曲柄、滑块和连接杆组成。
它通过曲柄的旋转使滑块在直线轨迹上运动,实现力的转换和传递。
曲柄滑块机构的应用领域曲柄滑块机构广泛应用于各种机械装置中,如发动机、压力机、冲压机等。
它具有结构简单、运动规律明确的特点,适用于各种工业领域的力传递和运动控制。
曲柄滑块机构的条件曲柄滑块机构的设计需要满足以下条件:•良好的刚度和稳定性:曲柄滑块机构在工作过程中承受着较大的载荷和振动,因此需要具备足够的刚度和稳定性,以确保其正常工作和长久使用。
•合理的运动特性:曲柄滑块机构的运动特性直接影响其传动效率和运动平稳性,需要根据具体应用要求设计合理的运动规律,如速度、加速度和位置曲线等。
•适当的润滑和密封:曲柄滑块机构的摩擦表面需要进行适当的润滑和密封处理,以减小摩擦损失和延长使用寿命。
•可靠的结构设计:曲柄滑块机构需要经过合理的结构设计,确保各个零部件之间的连接紧固可靠,避免因松动或磨损导致的故障。
曲柄滑块机构的设计要点在设计曲柄滑块机构时,需要注意以下要点:•合理选择曲柄和滑块的尺寸:根据所需的力传递和运动特性需求,选择适当的曲柄和滑块的尺寸,以保证其承载能力和运动平稳性。
•考虑滑块的回转角度:滑块在工作过程中可能会发生回转运动,需要合理设计回转角度和相关的约束装置,以确保机构的正常工作和稳定性。
•合理设置支撑点位置:支撑点的位置对曲柄滑块机构的运动轨迹和力传递效果有着重要影响,需要根据具体需求进行合理设置。
•设计合理的连杆:连杆作为连接曲柄和滑块的重要部件,需要具备足够的刚度和强度,同时根据运动规律进行优化设计,以提高机构的工作效率。
•考虑机构的运动平衡和振动抑制:在曲柄滑块机构设计中,需要考虑机构的运动平衡和振动抑制,通过合理的设计和调整,减小振动幅度和噪声。
结论曲柄滑块机构作为一种常见的机械传动机构,在工业领域发挥着重要作用。
往复泵曲柄滑块机构的运动学分析
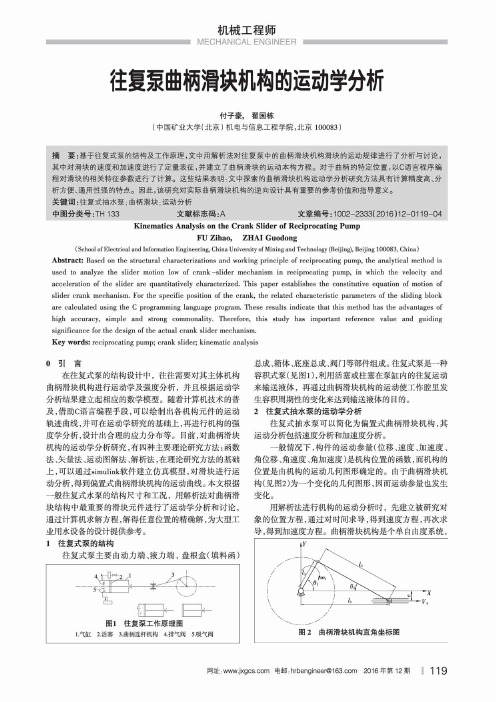
往复泵曲柄滑块机构的运动学分析付子豪,翟国栋(中国矿业大学(北京)机电与信息工程学院,北京100083)摘要:基于往复式泵的结构及工作原理,文中用解析法对往复泵中的曲柄滑块机构滑块的运动规律进行了分析与讨论,其中对滑块的速度和加速度进行了定量表征,并建立了曲柄滑块的运动本构方程。
对于曲柄的特定位置,以C语言程序编 程对滑块的相关特征参数进行了计算。
这些结果表明:文中探索的曲柄滑块机构运动学分析研究方法具有计算精度高、分 析方便、通用性强的特点。
因此,该研究对实际曲柄滑块机构的逆向设计具有重要的参考价值和指导意义。
关键词:往复式抽水泵;曲柄滑块;运动分析中图分类号:TH 133 文献标志码:A文章编号:1002-2333(2016)12-0119-04 Kinematics Analysis on the Crank Slider of Reciprocating PumpFU Zihao,ZHAI Guodong(School of Electrical and Information Engineering, China University of Mining and Technology (Beijing), Beijing 100083, China) Abstract:Based on the structural characterizations and working principle of reciprocating pump, the analytical method is used to analyze the slider motion low of crank -slider mechanism in reciprocating pump, in which the velocity and acceleration of the slider are quantitatively characterized. This paper establishes the constitutive equation of motion of slider crank mechanism. For the specific position of the crank, the related characteristic parameters of the sliding block are calculated using the C programming language program. These results indicate that this method has the advantages of high accuracy, simple and strong commonality. Therefore, this study has important reference value and guiding significance for the design of the actual crank slider mechanism.Key words:reciprocating pump; crank slider; kinematic analysis0引言在往复式泵的结构设计中,往往需要对其主体机构曲柄滑块机构进行运动学及强度分析,并且根据运动学分析结果建立起相应的数学模型。
曲柄滑块机构工作原理

曲柄滑块机构工作原理这种机构的工作原理可以用以下几个步骤来概括:1.曲柄旋转:曲柄是一个刚性的旋转轴,可以固定在机构的一端或者通过其他轴连接到外部动力源。
当曲柄开始旋转时,它将带动整个机构运动。
2.滑块往复:滑块是一个与曲柄配合的零件,它通常是一个平面状的零件,可以沿着一条直线轨道移动。
当曲柄旋转时,曲柄的运动将通过连接杆件传递给滑块,使得滑块产生往复运动。
3.连接杆件传递运动:连接杆件是用于连接曲柄和滑块的零件,通常由一个或多个杆件组成。
当曲柄旋转时,连接杆件将收到曲柄的转动动力,并将其传递给滑块。
连接杆件的长度和形状会影响滑块的运动规律。
4.滑块运动:滑块通过与曲柄和连接杆件的配合,实现直线往复运动。
在曲柄旋转的过程中,滑块先向远离曲柄的方向移动,然后再向曲柄靠近的方向移动,形成往复运动。
曲柄滑块机构的工作原理可以通过物理原理来解释。
当曲柄旋转时,滑块所受到的力会在滑块上产生一个正向或反向的加速度,使得滑块产生往复运动。
曲柄旋转的角度变化与滑块的位移关系可以通过几何学和三角学方法来分析。
曲柄滑块机构是一种简单而有效的机械传动装置,广泛应用于各种机械系统中。
例如,在内燃机中,曲柄滑块机构被用于将活塞的往复运动转换为旋转运动,以驱动曲轴的旋转。
在斜槽传送带中,曲柄滑块机构被用于将连续运动转换为间歇运动,以实现物料的传送。
总之,曲柄滑块机构通过曲柄的旋转运动带动滑块实现直线往复运动。
它的工作原理是通过曲柄和连接杆件之间的配合,将旋转运动转换为直线运动。
曲柄滑块机构在机械传动和运动控制中具有广泛的应用。
偏置曲柄滑块机构的运动学分析

研究生课程论文科目:是否进修生?是□ 否■偏置曲柄滑块机构的运动学分析摘要:综合利用函数法和矢量法,在ADAMS软件中对偏置式曲柄滑块机构进行了仿真和运动分析。
首先,通过函数法对偏置式曲柄滑块机构的运动特性进行分析,根据矢量法建立机构的运动学矩阵方程。
然后,介绍了ADAMS在偏置曲柄滑块机构运动学及动力学分析中的应用。
通过对偏置曲柄滑块进行仿真和分析,得到其运动曲线。
该方法的仿真形象直观,测量方便,在机械系统运动学特性分析中具有一定的应用价值。
关键词:偏置曲柄滑块;ADAMS;仿真;运动学Abstract: The article analyzes the simulation and kinetic characteristic of deflection slider-crank mechanism by the function and the vector method in ADAMS.The kinematic equation of the deflection slider-crank mechanism is established by vector method. The application of ADAMS in kinematics analysis of slider-crank mechanism is presented. The motion and dynamic curves of offset slider-crank by ADAMS/View is obtained. In the method, simulation is authentic, visualized and convenient in measurement. The result shows that the method is efficient and useful in the kinematic characteristics analysis of mechanism.Keyword: offset slider-crank mechanism ; ADAMS; simulation ; kinematic0.引言平面连杆机构是由若干个构件用低副(转动副、移动副)连接组成的平而机构,它不仅在众多工农业机械和工程机械中得到广泛应用,还应用于人造卫星太阳能板的展开机构、机械手的传动机构等。
曲柄滑块机构运动分析的简便图解法

曲柄滑块机构运动分析的简便图解法曲柄滑块机构是利用多轴关节间通过曲柄滑块机构建立位置联系,实现传动的一类机构。
它包括曲柄轴、滑块和接头、从而实现曲线运动、往复运动、轮廓曲线运动等。
本文主要介绍一种简便的图解法,可用于分析曲柄滑块机构的运动规律。
首先是基本要素的分析,曲柄滑块机构的基本要素有曲柄轴、滑块、接头。
曲柄轴是一种用于变换位置信息的轴,它能够把位置信息传递到滑块上,使滑块形成对应的位置。
滑块能够和曲柄轴之间建立有限的接触,从而使曲柄轴把位置信息传送给接头,形成所需的运动。
其次是图解法的原理及步骤。
曲柄滑块机构的根本是控制曲柄轴运动,它的运动规律是由曲柄轴的运动控制的,而曲柄轴的运动规律是由曲柄滑块机构的特征决定的。
采用图解法可以较容易地描述出曲柄滑块机构的运动规律,从而更好地分析机构的运动特性。
图解法的基本步骤是:第一步,先确定曲柄滑块机构的结构形式,并在平面图中绘制出一个曲柄滑块机构;第二步,在机构结构图中标注它各铰接节点的位置(如轴中心点、滑块中心点等);第三步,当曲柄轴的角度发生变化时,按照基于运动的结构的原理,推算出曲柄滑块机构各连接节点的运动情况,用椭圆形表示滑块的运动轨迹;第四步,根据所得的滑块的运动轨迹的轮廓,进行有关的计算分析,可以得出某些变量与角度的规律,用于描述曲柄滑块机构的运动规律。
综上所述,图解法不仅可以帮助人们更好地理解曲柄滑块机构的运动规律,而且可以有效地解决机构设计问题。
通过图解法可以快速、准确地推导出机构的各种运动要求,从而为曲柄滑块机构的设计提供可靠的理论依据。
结论:图解法是一种利用机构特性计算分析曲柄滑块机构运动规律的简便方法,它既可以提供有效的分析手段,又可以帮助机构设计人员更好地理解机构的运动。
图解法不仅复杂性较小且易于实施,而且其结果可以用于机构的设计和调试。
实验数学八:曲柄滑块机构的运动规律

目录
CONTENTS
• 曲柄滑块机构简介 • 曲柄滑块机构的运动特性 • 曲柄滑块机构的建模与仿真 • 曲柄滑块机构的设计优化 • 曲柄滑块机构的实验研究
01 曲柄滑块机构简介
曲柄滑块机构的基本概念
曲柄滑块机构是一种常见的机械机构 ,由曲柄、滑块和机架组成。曲柄通 常固定在机架上,滑块通过导轨或轴 承与曲柄相连,实现往复运动。
1 2 3
曲柄滑块机构的基本运动规律
曲柄滑块机构是由曲柄、滑块和机架组成的平面 连杆机构,其运动规律包括曲柄的旋转运动和滑 块的往复直线运动。
曲柄滑块机构的运动周期
曲柄滑块机构的运动周期是指完成一个完整的往 复直线运动所需的时间,通常由曲柄的长度和转 速决定。
曲柄滑块机构的运动轨迹
滑块的往复直线运动轨迹取决于曲柄的长度和转 速,可以通过调整曲柄长度和转速来改变轨迹。
曲柄滑块机构可以通过改变曲柄的长 度、角度或滑块的行程等参数,实现 不同的运动规律和功能。
曲柄滑块机构的应用领域
01
曲柄滑块机构广泛应用于各种机 械系统中,如冲压机、压铸机、 剪切机等。
02
在汽车制造领域,曲柄滑块机构 常被用于发动机的配气机构和曲 轴连杆机构中,实现气门的开闭 和活塞的往复运动。
设计一个用于实现大范围运动的曲柄 滑块机构,通过经验法和实验法进行 机构设计和优化。
实例二
设计一个用于实现高速传动的曲柄滑 块机构,通过仿真法模拟机构的运动 过程和特性,并进行实验验证。
05 曲柄滑块机构的实验研究
曲柄滑块机构的实验设备
实验台
用于固定和安装曲柄滑块机构 ,确保机构在实验过程中稳定
02
比较不同参数的影 响
曲柄机构运动速度计算公式

曲柄机构运动速度计算公式
曲柄机构是一种常见的机械传动装置,它可以将旋转运动转换为直线运动,常见于内燃机的曲轴连杆机构、活塞泵等机械装置中。
在工程设计和分析中,计算曲柄机构的运动速度是非常重要的,可以帮助工程师们更好地理解和优化机构的运动特性。
本文将介绍曲柄机构运动速度的计算公式及其应用。
曲柄机构的基本结构包括曲柄、连杆和活塞。
曲柄是一个旋转的杆状零件,连杆连接曲柄和活塞,活塞则在直线轨道上做往复运动。
曲柄机构的运动速度可以通过曲柄的旋转速度和连杆的长度来计算。
下面将介绍曲柄机构运动速度的计算公式及其推导过程。
首先,我们需要了解曲柄机构的基本参数。
假设曲柄的长度为L,曲柄的角速度为ω,连杆的长度为r,活塞的速度为v。
根据几何关系,可以得到曲柄机构的运动速度计算公式如下:
v = ω r。
其中,v表示活塞的速度,ω表示曲柄的角速度,r表示连杆的长度。
这个公式表明,活塞的速度取决于曲柄的角速度和连杆的长度。
如果我们知道了曲柄的角速度和连杆的长度,就可以通过这个公式来计算活塞的速度。
接下来,我们来推导这个公式。
首先,考虑曲柄的运动,根据角速度的定义,曲柄的角速度ω可以表示为曲柄的角位移θ随时间t的变化率,即:ω = dθ / dt。
然后,考。
第二节 曲柄滑块机构的运动与受力特点-新模板做的

学习内容 1、了解运动和受力公式,此部分了解分析的方法, 已经有了更好的算法,此部分了解一下即可。 2、重点理解压力机许用负荷图是如何得出的,对 L/O/G/O 于选择压力机有什么意义。
这一部分具体推导参见课 本
一、曲柄滑块机构的运动分 析 1、滑块位移与曲柄转角的关系
dt d dt
d
.
ddຫໍສະໝຸດ Rsin 2sin
2
2Rcos cos2 4
压力机滑块位移、速度和加速度曲线
❖ 运动原理: Vmax= ±ωR = ±2πnR/60 = ±πns/60 s-滑块行程, n-转 速, R-曲轴半径
❖ 滑块的运动速度是变化→要求速度恒定的工艺不完全合适
5
二、曲柄滑块机构受力分析 1、连杆与导轨受力分析
FAB F / cos Q F tan
FAB F
Q F sin a
二、曲柄滑块机构受力分析
(2)曲轴受扭矩
ML
FR (sin
a
2
sin
2a)
•F一定时,曲轴所受扭 矩随a值增大而增大;
•ML一定时,变形抗力F 随a值增大而减小;
•临界角(标称压力角)ag
3、压力机许用负荷图
ML恒定
F M gL (sin a sin 2a)1
1
1
1 2 sin2
采用幂级数展开,并取近似得:
s
R(1
cos
)
4
1
cos2
3
2、 滑块速度与曲柄转角的关系
滑块速度:
v d(2R s) ds ds . d . ds
dt
dt d dt d
Rsin sin 2
曲柄滑块机构的运动规律ppt课件

l 3r 300(mm) 240(转/ min)
3
数学模型
取O点为坐标原点,OP方向为x轴正方向,P在x 轴上的坐标为x,那么可用x表示滑块的位移。
利用三角关系,立即得到
x r cos l2 r2 sin2
(1.1)
t dx dx d dx
(1.2)
dt d dt d
4
x r cos l2 r2 sin2
(1.1)
dx r sin r2 sin cos (1.3)
d
l2 r2 sin2
于是滑块的速度
v dx dx d dx dt d dt d
r sin 1
r cos
(1.4)
l2 r2 sin2
进而,可以得到滑块的加速度为
(1.4)进行近似。
v
r sin 1
r cos
l2
r2
sin2
(1.4)
仍利用公式(1.12)
(1 )a 1 a , 1 (1.12)
1
l 2 r 2 sin 2
1 l
1
r2 l2
sin 2
1
2
1 l
1
r2 2l 2
sin 2
把上式代入(1.4),就得到滑块速度的近似模型
2
12
、5
12
之间。
运用方程求根的数值方法,例如Newton法,对于加
速度的三种表达式,分别可以得出
1.2772 0.407时 , a 0
1.2773 0.407时 , a2 0 1.2862 0.409时 , a1 0
因此在求加速度(绝对值)的最值时,近似模型
也是十分有效的。
利用滑块位移的解析式(8.1)和近似式(8.13),
曲柄滑块机构及曲柄导杆机构的运动规律

曲柄滑块机构及曲柄导杆机构的运动规律
曲柄滑块机构和曲柄导杆机构都是常见的机械传动机构之一,其运动规律如下:
1. 曲柄滑块机构的运动规律
曲柄滑块机构由曲柄、连杆和滑块组成。
当曲柄转动时,连杆带动滑块做直线往复运动。
曲柄的转动是匀速的,而滑块的速度则是变化的。
具体来说,滑块在前半周期内加速,后半周期内减速,且滑块的最大速度出现在过渡点处。
2. 曲柄导杆机构的运动规律
曲柄导杆机构由曲柄、连杆和导杆组成。
与曲柄滑块机构相比,曲柄导杆机构的特点是滑块被曲柄改为了导杆,使得滑块的运动方式发生了变化。
当曲柄转动时,导杆在导轨上做往复运动,同时连杆也产生了往复运动。
曲柄的转动是匀速的,导杆的速度也是变化的。
具体来说,导杆在前半周期内减速,后半周期内加速,且导杆的最大速度出现在过渡点处。
总之,曲柄滑块机构和曲柄导杆机构的运动规律都是由曲柄的匀速转动和连杆的往复运动所决定的。
不同的是,曲柄滑块机构中滑块的运动方式为直线往复运动,而曲柄导杆机构中导杆的运动方式为沿导轨做往复运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
xmax l r ,
xmin l r ,
s (l r ) (l r ) 2r 200(mm)
Ⅱ.滑块的加速度及其最值
2 2 4 r ( l cos 2 r sin ) a 2 r cos 3 2 2 2 2 (l r sin )
2 2 4 r (l cos 2 r sin ) 2 a r cos 3 2 2 2 (l r sin ) 2
(8.5)
d 2 r 2 sin (l 2 r 2 ) 3 2 dt (l 2 r 2 sin 2 ) 2
8.3 数学模型
取O点为坐标原点,OP方向为x轴正方向,P在x 轴上的坐标为x,那么可用x表示滑块的位移。 利用三角关系,立即得到
x r cos l 2 r 2 sin2
(8.1)
(8.2)
5
t
dx dx d dx dt d dt d
x r cos l r sin
r x1 r cos l sin2 2l
2
(8.1)
(8.13)
表8.1列出了 从0到π位移一些相应数值(单位:mm)。 考虑到对称性和周期性,只要计算这一区间中的 函数值就可以了。
15
表8.1
/ 12
2 / 12
x
0
400.000 395.475 382.407 362.258 337.228
l
(8.20)
13
r 1 sin (8.19) l r r3 2 sin 3 sin 3 l 6l
(8.20)
相应的近似角速度为 d 1 r cos (8.21) dt l r d 2 r3 2 或 cos 3 sin cos (8.22) dt 2l l 近似角加速度为 d 2 2 r 1 sin (8.23) 2 dt l
(8.11)
虽然我们已经得到了有关变量的解析式,但是要求出问题的 解并非十分简单。由于滑块加速度和摆角角加速度的函数表达 式(8.5)和(8.11)相当复杂,从这两个式子来了解这两个量 并不方便,而要用它们进一步求出极值则更加不易(当然,可 9 以借助数学软件来进行,我们把这一点留给读者)。
由于数学模型本身是对实际问题的抽象,从而也必 定有某种简化和忽略。即使我们得到了问题的解析形 式解,一般说来,它仍然是对实际情况的近似。为了 方便起见,对较为复杂的解析模型进行近似处理常常 是必要的。事实上,在曲柄连杆结构(以及不少工程 问题)的研究中,确实经常使用着这个方法。 8.4 近似模型
(8.4)
进而,可以得到滑块的加速度为
6
d d a dt d
2 2 4 r (l cos 2 r sin ) 2 r cos 3 2 2 2 (l r sin ) 2
(8.5)
同样,基于关系式
l sin r sin
/ 12 2 / 12 3 / 12
4 / 12
5 / 12
/2
7 / 12
8 / 12
18
9 / 12 10 / 12
44 027.5 43 568.4 42 562.8 42 110.3
44 079.9 43 590.5 42 564.8 42 110.3
44 664.7 44 175.3 42 778.9 42 110.3
x r cos l 2 r 2 sin2
将位移的表达式(8.1)改写为
(8.1)
1 2
r2 2 x r cos l 1 l 2 sin
a
(1 ) 1 a , 1
(8.12)
10
滑块位移的近似模型为2 r 2 x1 r cos l sin (8.13) 2l 从而有相应的近似速度 dx1 dx1 d r2 1 r sin sin 2 dt d dt 2 l r r sin sin 2 (8.14) 2l 和近似加速度 d1 r 2 a1 r cos cos 2 (8.15) dt l 这里速度和加速度是直接对近似位移模型求导得来, 而不是对v和a的精确表达式(8.4)和(8.5)的近似。 11
2 2 2
(8.1)
dx r sin cos r sin d l 2 r 2 sin 2
2
(8.3)
dx dx d dx v dt d dt d
于是滑块的速度
r cos r sin 1 2 2 2 l r sin
r2 一般而言,2 是远比1小的数, l
当然,我们也可以直接从滑块速度的解析式 (8.4)进行近似。
r cos v r sin 1 2 2 2 l r sin
(1 ) 1 a , 1
a
(8.4)
(8.12)
仍利用公式(8.12)
arcsin , 1 (8.18) 6 r arcsin sin (8.7) l 得到摆角的近似模型。 r 粗略一些,可以取 1 sin (8.19)
3
而必要时,可以取
r r3 2 sin 3 sin 3 l 6l
1 r2 2 1 2 sin 2 2 2 l l l r sin 1
1 2
1 r2 2 1 2 sin l 2l
把上式代入(8.4),就得到滑块速度的近似模型 r cos r2 2 2 r sin 1 1 2 sin l 2l
利用精确表达式(8.5)和近似表达式(8.15)、(8.17),
(8.5)
d1 r 2 a1 r cos cos 2 dt l
(8.15)
(8.17) 17
3 2 2 r cos 2 r (sin 2 2sin cos 2) 2 a2 r cos 3 l 4 l
计算滑块的加速度。注意加速度仍具有对称性和周期性。 表8.2列出了一些相应的数值(单位:mm/s2 ): 表1.2 mm/s
2
0
a
-84 220.6 -79 463.6 -65 837.4 -45 302.0 -21 086.8 2 739.2 22 332.4 35 436.1 42 078.6
4 5 从表上看出:零点在 、 12 12
11 / 12
从表8.2中可以看出,用加速度的近似公式计算, a2 的结要相当好。 a1 的结果稍微差一些, 考虑到在应用近似模型时,表达式的推导和有关 计算工作量都将明显地减少,因此在某些情况下,这 样的做法还是合适的。 加速度绝对值的最大值从表8.2立即得到。 无论用哪种模型,均在 0 a a2 a1 84 220.6 (mm / s 2 )
a2
-84 220.6 -79 461.5 -65 815.3 -45 249.6 -21 055.2 2 684.8 22 224.9 35 381.7 42 110.3
a1
-84 220.6 -79 247.5 -65 230.5 -44 664.7 -21 055.2 1 885.9 21 055.2 34 582.7 42 110.3
3 d 2 2 r r 2 3 或 sin 3 (sin sin 2 cos ) (8.24) 2 dt 2l l
14
8.5 问题的解法和讨论 Ⅰ.滑块的位移和行程 利用滑块位移的解析式(8.1)和近似式(8.13),
x r cos l 2 r 2 sin2
我们有摆角的表达式
r arcsin sin l
(8.6)
(8.7)
d d l cos r cos r cos 式(8.6)对t求导, dt dt
7
d r cos dt l cos
由此再得
d sin cos cos sin 2 d r dt 2 dt l cos 2 (8.9)
19
至于加速度绝对值的最小值,显然是加速度的零点。 之间。 运用方程求根的数值方法,例如Newton法,对于加 速度的三种表达式,分别可以得出 1.2772 0.407时 , a 0 1.2773 0.407时 , a2 0 1.2862 0.409时 , a1 0 因此在求加速度(绝对值)的最值时,近似模型 也是十分有效的。
利用(8.6), l sin r sin r cos 不难由上两式导出 d
dt
2 2
ቤተ መጻሕፍቲ ባይዱ
(8.6)
2
l r sin
(8.10)
d 2 r 2 sin (l 2 r 2 ) 3 2 dt (l 2 r 2 sin 2 ) 2
(8.11)
8
至此,我们得到了滑块位移x和连杆摆角 运动规律中有关变量依赖 的表达式。 滑块的加速度为
x1
400.000 395.476 382.436 362.377 337.500
mm
3 / 12
8 / 12
….. 10 / 12
11 / 12
……
209.201 202.289 200.000
……
209.231 202.291 200.000
行程可以从表8.1中的值求得,
16
s 400 200 200(mm)