基恩士CV-5000技术手册
基恩士——影像系统

为何系统?优势照明控制扩展单元提供照明灵活性。
优势KEYENCE 提供各式各样的照明单元以满足几乎所有应用需求。
[世界首创]“可扩展的”控制器结构以经济的方式增强控制CV-5000 系列提供 CCD 扩展单元与照明控制扩展单元,可根据需要将它们添加到主控制器上。
此结构可供用户通过只选择需要的单元来控制成本,又不失适应未来变化的灵活性。
镜面反射的图像示例检测金属表面上是否存在刻字有必要反映出平整金属表面与刻字凹陷之间的差异。
由于金属表面容易反射照明,而刻字则不能,因此,最优方法是使用镜面反射来凸显表面与刻字之间的差异。
照明选择(镜面反射、漫反射、透射光)LED 照明可分为以下三种主要类型:1. 镜面反射型:光线照射到工件上,镜头接收到直接反射的光线。
2. 漫反射型:光线照射到工件上,镜头接收到均匀的环境光线。
3. 透射光型:光线照射到工件上,镜头接收到透射剪影。
[世界首创]LED 照明控制扩展单元轻松控制照明,无需额外布线每个照明控制扩展单元都有两个照明连接器。
最多可将 4 个照明扩展单元连接到一个 CV 控制器上,从而允许同时控制总共 8 个照明*。
控制器的 CCD 配置菜单拥有内置调光控件与可配置的照明模式。
这可为用户提供对照明的完全控制,而无需单独布线和基于 PLC 编程。
通过将照明设定为每次触发时选通来延长 LED 寿命。
还可以通过 CV 用户界面与外部命令控制来调整发光亮度。
* 只要照明的总功率不超过额定功率,就可以使用选配的双头连接线来连接其它照明。
例如,用户最多可以连接 16 个 10 W 的 LED 照明。
照明控制扩展单元控制器CCD 扩展单元镜面反射透射光入射光工件漫反射吸收漫透射光刻字不清楚。
由于包装反光,无法检测印刷字体。
边缘上的缺口不清楚。
由于标签极易反光,因此边缘不清楚。
采用镜面反射采用镜面反射采用镜面反射刻字很清楚。
由于均匀照亮包装表面,反光得到有效消除,显示的印刷字体具有高对比度。
Polytec OFV-5000 Vibrometer Controller说明书

OFV-5000 Vibrometer ControllerOFV-5000Vibrometer Controller– Velocity Decoders– Displacement DecodersOFV-505/503Standard SensorsOFV-511/512Fiber-Optic SensorsM E A S U R I N G V I B R A T I O N SPolytec’s modular vibrometer controller is continually improving to meet the needsof advanced vibration measurement applications. The latest design adds digitalprocessing with a range of new features that make non-contact vibration analysiseven more precise, simple, flexible and rewarding.OFV-5000 Controller –The Soul of a Quality Vibrometer SystemOFV-5000 replaces the widely respected OFV-3001 modular controller. Its advantages include improved vibration resolution and dynamic range from new digital/analog decoders, remote focus and focus memory (with OFV-505), more capacity for a wider range of modules and digital filtering. Polytec Laser Doppler Vibrometers operate on the Doppler principle, measuring back-scattered laser light from a vibrating structure, to determi-ne its vibrational velocity and displacement. A vibrometer system is comprised of controller electronics and a non-contact standard-optic or fiber-optic sensor head. The controller provides signals and power for the sensor head, and pro-cesses the vibration signals. These are electroni-cally converted by specially developed decoders within the controller to obtain velocity and displacement information about the test structure. This information is provided by OFV-5000 in either analog or digital form, for further data evaluation.Functionality and FlexibilityModular ApproachA wide range of configurations offers optimalperformance for the task with maximum flexi-bility and expandability to meet future needs.Application-Specific ConfigurationBy selecting from a choice of different analogand/or digital decoders, performance can beprecisely tailored to match the demands ofthe application.Several compatible standard-optic and fiber-optic sensor heads are available to meet specificneeds for robustness, flexibility and ease-of-use.Upgradeable to Scanning VibrometerOFV-5000 is fully upgradeable to Polytec’snew 1-D and 3-D Scanning Vibrometersystems for full field vibration analysis.Remote Focus FunctionsAutofocus, remote focus and focus memoryare all possible with the OFV-5000 controllerused with the new OFV-505 sensor head.M O D U L A RV I B R O M E T E RS Y S T E MBusiness UnitLaser Measurement SystemsTel.+49(0)7243 604-178Tel.+49(0)7243 604-104*************Flexible Signal ProcessingThe OFV-5000 controller is designed to accept a choice of signal processing modules, each optimized for different frequency, velocity or displacement performance.Each module is therefore tuned for different measurement tasks by making the best use of the vibration information in the Doppler signal obtained by the sensor head.Various analog and/or digital decoder options seamlessly cover the entire velocity range up to ±10 m/s, displacements from the sub-nanometer to the meter range, and frequencies from DC to 20 MHz. Up to four decoders can be installed simultaneously to obtain the greatest possible flexibility. This flexibility also allows retrospective add-ons and modifications to meet future needs.Laser Vibrometry Expansion Options, using the OFV-5000 ControllerVibrometer Measurement SystemA system comprises an OFV-5000 controller,choice of decoder modules and a sensor head.A choice of standard single point andfiber-delivered single point sensors, or dual (differential) fiber sensors is available.Expansion to Scanning Vibrometer SystemsA system based on the OFV-5000 can be extended to a full scanning vibrometer system by adding other components.The Polytec Scanning Vibrometer (PSV) makes it possible to rapidly and automatically acquire vibration characteristics of complete surfaces,while the PSV-3D extends this to three-dimensional data acquisition and analysis. The Micro-Scanning Vibrometer and Micro Motion Analyser (MMA)have been developed to perform the same measurements on microstructures.Velocity Decoders Displacement Decoder Auxiliary DecoderDSP FilterSlot 1Slot 214-bit or16-bit FCDSP *Velocity or DisplacementVD-01–DD-100orDD-200–VD-05**DD-300–VD-02–––VD-02VD-06DD-500**LF-02VD-04–––VD-04VD-06DD-500**LF-02–VD-06DD-500**DD-400 or DD-300LF-02DD-300Table of Decoder Combinations*Instead of the internal displacement decoder, a DD-600 I&Q demodulator for external PC-based signal processing can also be installed (VibSoft-VDD)**from 2004 onwardsDisplacement DecodersDD-100 and DD-200 analog 14 bit dis-placement decoders take phase information from the Doppler signal to provide direct displacement signals, not derived from the velocity information. They may be used in conjunction with velocity decoders toprovide full vibration characterization of the test structure.Alternatively, OFV-5000 accepts the DD-500A further option is the DD-600 I&Q demodulator. This is designed to allow processing of the digital signal with the PC-based VibSoft-VDD package. This pro-vides the highest resolution and dynamic range of all the displacement decoder options.DD-300 and DD-400 decoders are designed for use in the Auxiliary Slot. The highfrequency DD-300 measures between 50 kHz and 20 MHz. The VD-400 employs an analog integrator.DSP FilterThe DSP based adaptive filter module significantly improves the signal-to-noise ratio of the vibration signal by suppressing random and non-periodic noise forfrequencies ranging from DC to 20 kHz. The adaptive filter can only be used inconjunction with the digital decoder VD-06.Selection and Combination of Signal DecodersThe OFV-5000 controller has four internal slots to accept up to four different signal decoders, depending on the desired measure-ment ranges. Two are specifically designated for velocity decoders and one is for the displacement decoder. An Auxiliary Slot is provided to take a further optional velocity or displacement decoder.sales or application engineer who will help you to select the appropriate decoders and VibSoft Software.Velocity DecodersThe VD-01 velocity decoder offers the highest linearity for frequencies up to 50 kHz. The VD-02 has an extended range up to 1.5 MHz. The VD-04 3-range decoder is required if the DD-400 analog integrator displacement decoder is selected. VD-05 is intended for use in the Auxiliary Slot, and with a frequency response to 10 MHz is par-ticularly well suited for ultrasonics applications.For the very best precision in the low velocity region (up to 500 mm/s), we recommend the VD-06 digital decoder.Decoders can be used together. For example VD-02 used together with VD-06 will give the greatest dynamic range and optimal frequency and velocity performance. Alter-natively, a DD-400 displacement integrator with VD-04, plus VD-06 will give velocity and displacement.Outputs analog On the front: Velocity out, Displacement out, DSP out, Auxiliary out; On the back: Signal level out Interface RS-232Ambient temperature +5 °C to +40 °C Storage temperature –5 °C to +60 °CPower supply Switch mode power supply with wide range input 100 ... 240 V Display Outputs digitalIlluminated graphics LCD with menu assistance S/P-DIF optical and electricalRelative humidity 20 % to 80 %, non-condensingWeight9.7 kgDimensions [W x H x L]450 mm x 360 mm x 145 mm (19” housing)OFV-5000 Technical DataGeneral Specifications Standard single point sensor heads OFV-505, OFV-503 (also OFV-303, OFV-353)Fiber optic sensor headsOFV-511, OFV-512Sensor Head Compatibility Polytec GmbH Polytec-Platz 1-776337 Waldbronn GermanyTel.:+49(7243) 604-0Fax:+49(7243) 69944E-Mail:*************LambdaPhotometrics Ltd.Lambda House, Batford Mill HarpendenHertsfordshire AL5 5BZ Great BritainTel.:+44(1582)764334Fax:+44(1582)712084E-Mail:*******************.uk Polytec PI, S.A.32 rue Delizy93694 PANTIN Cédex FranceBusiness UnitLaser Measurement Systems Tel.+49(0)7243 604-178Tel.+49(0)7243 604-104*************OFV-505/503 Vibrometer Sensor HeadOFV-5000Vibrometer Controller – Velocity Decoders– Displacement Decoders OFV-505/503 Standard Sensors OFV-511/512Fiber-Optic SensorsM E A S U R I N G V IB RA T I O N SPolytec Laser Doppler Vibrometers are used to precisely measure mechanical vibrations, quickly, easily and free from cross-talk or feedback problems. They operate on the Doppler principle, measuring back-scattered laser light from a vibrating structure, to determine its vibrational velocity and displacement.OFV-505/503 Compact Sensor Heads – The Heart of a Quality Vibrometer SystemCustomers familiar with Polytec’s single-point sensor heads, will appreciate the outstanding performance and reliability of these models. The completely new optical design of the OFV-505 and OFV-503 heads offers even better performance including exceptional optical sensitivity. The OFV-505 features autofocus and focus memory.Coupled to the new OFV-5000 modular vibro-meter controller (see separate data sheet), the OFV-505/503 sensor heads take full advantage of the higher resolution processing of the OFV-5000– digital as well as analog. OFV-505 and OFV-503are at the heart of a range of universal and expandable non-contact vibrometer systems.ApplicationsSingle point sensor heads are used for applications in the automotive and aerospace industries, on electrical appliances or machines, for monitoring buildings, on-line quality testing and other mechan-ical production, research and development projects.FeaturesPractical, Easy,“Point & Measure”Capability Low Power, Visible, Eye-Safe (Class 2) Laser provides outstanding optical sensitivity(for example, measurement from matt black paper loudspeaker surfaces at >30 m).Remote Focus Control,with “Memory Position” FacilityStepper motorized focusing can be made either manually at the head or via the OFV-5000 control panel. Focus positions can be precisely returned to (only OFV-505).The focus position can also be locked.Auto Focus (with OFV-5000)The OFV-505 sensor head can auto-sense the return signal quality and automatically set the focus for an optimal signal.Expandability OptionsThe OFV-505 sensor and OFV-5000 controller are fully upgradeable to Polytec’s new 1-D and 3-D Scanning Vibrometer systems for full field vibration analysis.M O D U L A RV I B R O M E T E R S Y S T E MCLASS II LASER PRODUCTManual focusingElectrical control of the internal focusing unit (mechanically isolated)* Auto Focus OFV-505: standard / OFV-503: not available Operating temperature range +0 °C to +40 °CRelative humidity 20 % to 80 %, non-condensing Dimensions [W x H x L]120 mm x 80 mm x 345 mm Remote Focus Maximum stand-off distance Coherence maxima Compatibility PSV-UpgradeableOFV-505: standard / OFV-503: not available > 300 m (with OFV-SLR, surface dependent)234 mm + n·204 mm; n = 0, 1, 2, 3, …measured from the focusing ringOFV-505 recommended for controller OFV-5000;OFV-503 recommended for controller OFV-2200, -2700, -26XX OFV-505: yes / OFV-503: –Weight3.4 kgLaser wavelength 633 nm, visible laser beamLaser protection class Class II He-Ne laser, < 1 mW, eye-safe OFV-505/503 Technical DataGeneral Specifications Polytec GmbH Polytec-Platz 1-776337 Waldbronn GermanyTel.:+49(7243) 604-0Fax:+49(7243) 69944E-Mail:*************LambdaPhotometrics Ltd.Lambda House, Batford Mill HarpendenHertsfordshire AL5 5BZ Great BritainTel.:+44(1582)764334Fax:+44(1582)712084E-Mail:*******************.uk Polytec PI, S.A.32 rue Delizy93694 PANTIN Cédex FranceVD/DD Decoder GuidelineOFV-5000Vibrometer Controller– Velocity Decoders–DisplacementDecodersOFV-505/503Standard SensorsOFV-511/512Fiber-Optic SensorsD E C O D E R S E L E C T I O N&C O M B I N A T I O NBy selecting from a choice of different analog and/or digital decoders, performance ofthe OFV-5000 Vibrometer Controller can be precisely tailored to match the demandsof the application. Up to four decoders can be installed simultaneously to obtain thegreatest possible flexibility. This flexibility also allows subsequent add-ons andmodifications to meet future needs.Decoder SelectionThe OFV-5000 controller is designed to accept a choice of signal processing modules, each optimized for different frequency, velocity or displacement performance.Various analog and/or digital decoder options seamlessly cover the entire velocity range up to ±10 m/s, displacements from picometers to meters, and frequencies from DC to 20 MHz. The following table lists the basic featuresof the velocity decoders available for theOFV-5000. Displacement decoders andrecommended decoder combinations aredescribed on the reverse side.For more information please see separatedata sheets for the respective decoders andthe OFV-5000 vibrometer controller.M O D U L A RV I B R O M E T E RS Y S T E MAvailable Velocity Decoders* in preparation ** to be determined *** Adaptive filter module LF-02 recommendedAvailable Displacement DecodersDecoder CombinationPolytec GmbH Polytec-Platz 1-776337 Waldbronn GermanyTel.+49(0)7243 604-0Fax +49(0)7243 69944***************Polytec-PI, S.A.32, rue Délizy 93694 Pantin FranceTel.+33(0)148103930Fax +33(0)148100803******************LambdaPhotometrics Ltd.Lambda House, Batford Mill Harpenden, Herts AL5 5BZ Great BritainTel.+44(0)1582 764334Fax +44(0)1582 712084*******************.uk Description No. of Ranges Full Scale Output Frequency Range ±82 mm 0 Hz –250 kHz Decoder Basic displacement decoder (requires any velocity decoder)DD-1008Best Resolution 80 nm ±82 mm 0 Hz – 250 kHz ±75 nm50 kHz – 20 MHz **20 Hz – 250 kHz ±50 mm0 Hz – 350 kHzHigh-resolution displacement decoder (requires any velocity decoder)20 MHz displacement decoder for ultra-sonics (requires any velocity decoder)Integrating displacement decoder (requires VD-04)Digital high-end displacement decoder(requires VD-06)I&Q converter for data processing with VibSoft VDD DD-200DD-300DD-400DD-500*DD-600*1323162 nm 0.1 pm**15 pm* in preparation ** to be determined。
基恩士kv5000_3000

KV-5000/3000 初学者教材(基本梯形图回路篇)本教材以初次使用可编程控制器的人员为对象,从用户手册中摘录了常用指令并进行了相关说明。
另外,本书中的解说内容可以向KV-5000/3000实际输入并进行编程,不过未对KV-5000/3000实施配线并打算进行试验时,请将R000~R005替换成MR000~MR005等,从梯形图软件上执行接点的ON/OFF 操作。
(基于模拟器的动作时,在保持R000~R005不变的状态下也可动作。
)请配合手头配备的KV-5000/3000实际机型加以阅读和使用。
基恩士 KEYENCEKV0971CN-目录-第1章何谓KV-5000/3000?何谓KV-5000/3000 ............................................. P2FA中的控制 ....................................................... P3何谓顺控程序控制............................................... P4KV-5000/3000可实现的功能 ............................... P5 第2章KV-5000/3000的编程何谓梯形图程序?............................................... P6KV-5000/3000的程序 ......................................... P7KV-5000/3000的软元件构成 ............................... P8起动KV STUDIO Ver.6 ....................................... P9梯形图的全新编程和单元的初始设定.................... P10 梯形图程序的编制①(LD OUT) ........................ P12 梯形图程序的传送和监控..................................... P14 梯形图程序的编制②(LDB OUT)...................... P16 梯形图程序的编制③(AND回路)...................... P18 梯形图程序的编制④(OR回路)........................ P19 梯形图程序的编制⑤(自我保持回路) ................ P20 控制和时间的关系............................................... P21 基于ON延迟定时器的控制 ................................. P22 ON延迟定时器的应用......................................... P23 基于OFF延迟定时器的控制................................ P24 基于单发脉冲定时器的控制 ................................. P25 基于定时器的控制的总结..................................... P26 计数器的活用 ..................................................... P27 计数器的控制 ..................................................... P28 关于扫描时间的思路・双重线圈 .......................... P30 双重线圈的原理 .................................................. P31 总结问题 ............................................................ P32 总结问题解答 ..................................................... P33 方便指令 ............................................................ P35 模拟器功能......................................................... P37第1章 何谓KV-5000/3000?[何谓KV-5000/3000]KV-5000/3000是指内部具备微型计算机(CPU :中央运算装置)和存储器(记忆元件)的可编程控制器。
基恩士简单手册_5CN

CV-3000/CV-3500 系列简单设定手册模拟器软件:CV-H3N 篇_⑤⑤编辑个人电脑内的 CV-3000 系列设定文件的方法・编辑个人电脑内的 CV-3000 系列设定文件,重新向个人电脑内写入基恩士株式会社VISIA 事业部【注意】・本资料是从带模拟器功能的通信软件“CV-H3N”的“用户手册”中,将使用频率高的功能进行部分摘录后制成的简易手册。
功能的详情请确认“用户手册”中的介绍。
■从个人电脑内驱动器文件夹读取设定数据读取个人电脑的 C 驱动器或外部可移动磁盘中保存的设定数据。
1 选择[模拟器]菜单的[设定数据的读取/]。
数据收集过程中无法操作。
请停止收集后再操作。
1 显示[读取源选择]的信息。
・读取源装置选择[文件(个人电脑内驱动器文件夹的设定数据)]。
未和 CV-3000 系列连接时,[连接对象]为灰色。
・读取源从个人电脑内驱动器文件夹指定作为读取对象的设定文件。
・读取对象按初始值[设定数据]/[登录图像]/[字典数据]进行选择。
载入[环境设定]后,设定 NO 自动和本体数据吻合。
2 显示[读入位置选择]的信息。
・工作空间名显示选择的工作空间的名称。
・读入位置/读入位置设定 NO指定读入位置设定 NO。
・文件从个人计算机内驱动器文件夹读取设定数据时,向个人计算机内驱动器文件夹写入设定数据时选择。
・连接对象想要和连接至个人电脑的 CV-3000 进行设定数据的读取/写入时选择。
3选择[读取源]。
选择个人计算机内及外部可移动媒体内的设定数据文件夹。
■参考左图示例为选择了和个人电脑连接的E驱动器的存储卡内的设定 No 026。
4 选择[读入位置]。
模拟器的C 驱动器写入模拟器假想C 驱动器的设定 No 数据时选择。
模拟器的D 驱动器写入模拟器假想D 驱动器的设定 No 数据时选择。
5 选择[读入位置设定No]。
初始值为模拟器当前使用的设定 No。
6 单击[执行]按钮。
显示[确认]信息。
M5000直读光谱仪用户手册
概况
本手册所介绍的产品在出厂前均经过严格的检验,以确保产品的质量。为了保证其安全、 可靠的运 行,获得正确的分析结果,用户必须严格按照本手册所述的使用方法进行操作。另外,恰当的运输、仓储 和安装及合理的操作和维护都有助于系统的安全正常运行。 本手册介绍了日常使用 M5000 直读光谱仪的信息,对 M5000 直读光谱仪的组成、安装、操作和维护 等内容作了详细的说明,同时也介绍了 M5000 台式直读光谱仪的构成和性能特点。它为受过专门培训或 具有仪器操作控制相关知识(例如自动化技术)的技术人员提供了准确的使用参考。操作人员必须正确地 理解本手册所提到的安全信息和警告信息,并运用到实际操作当中去。
许可标识
本分析仪已获得国家计量器具型式批准证书和制造计量器具许可证:
批注 [y1]: 有参考标准吗?
I
阅读说明
注意和警示信息
本手册介绍了 M5000 直读光谱仪的具体应用,以及如何启动、操作和维护该光谱仪。需特别指出的 是,本手册中的注意和警示信息至关重要(在手册中强调显示,并加有适当的图标) ,能有效地避免不恰 当的操作。 本手册所述产品的开发、制造、测试都把适当的安全标准放在首位。因此,如果用户按照本手册指导 进行装配、核准使用和维护,可避免因操作不当而造成的常规使用中的财产损失和人身危害。 本手册中有相关注意和警示信息。此类信息以特定图标显示,并附有相应的解释文字。本手册所使用 注意及警告信息释意如下: 图标 说明 提示标记和信息——表示在产品使用过程中提醒用户的一般信息,或本手册 中需一般关注的部分。 注意标记和信息——表示在产品使用过程中需注意的重要信息,或本手册中 需特别关注的部分。 警告标记和信息——表示在产品使用中,若没有遵守适当的安全措施,将会 造成本仪器无法正确测量,特别严重的情况可能会造成重大人身伤亡或财产 损坏事故。
技术指南-光电传感器-基恩士
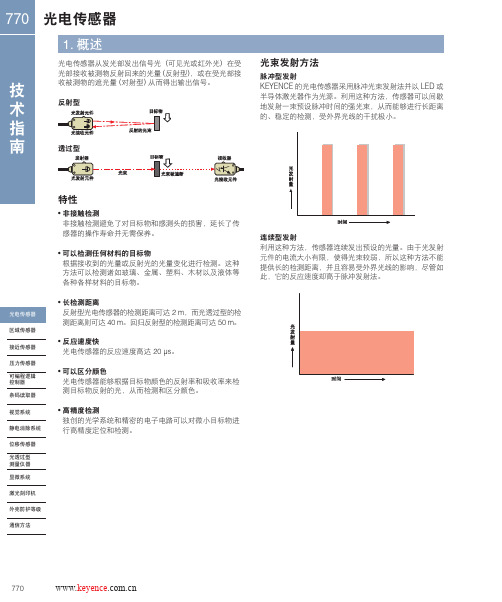
玻璃光纤 玻璃光纤由直径 10 至 100 µm 的玻璃纤维套在不锈钢 套管内组成,因此可以在高温 (最高 350°C) 的条件下使 用。
2. 特性
• 安装灵活 使用柔性光纤,可以方便地安装在机器之间狭小的空间 内。
• 检测小目标物 感测头的光发射面极为紧凑,可以对小目标物进行稳定 检测。
• 在苛刻环境中稳定地操作 光纤中没有电流通过,因此不受电杂波的影响。
• 耐热 耐热光纤可以在高温环境中进行检测 (最大 350ºC)。
这种类型有若干根直径 10 µm 的玻璃 纤维,发射器和接收器彼此分开。
因为使用强光束,可以进行长距离检
测。
PX, PS, PQ,
不会损坏未曝光胶片。
PG, PW, PZ-G
绿色 (LED)
激光 二极管 (红色、 红外线)
可见光束点由于光衰减系数高,适合 检测微小差异。检测颜色标记 (把白 色、浅黄色或橙色与黑色、浅绿色、 浅红色或浅蓝色区分开)
FS-V21G/V22G, FS-T1G, FS2-60G
4. 弯曲半径
光纤过度弯曲会导致光的损失,从而降低检测精度。 KEYENCE 提供具有极小弯曲半径的光纤。
• 光量保持率与弯曲半径的关系曲线 (典型)。
67
774
5. 光纤长度和检测距离
光纤光电传感器的检测距离随光纤长度改变。
• 光纤长度与检测距离的关系曲线 (典型)。
1 绿色 LED 2 红色 LED 3 红色半导体激光器 4 红外半导体激光器 5 红外 LED
基恩士操作说明(焊缝检测)

致危险的激光放射爆炸。
● 发射孔标签
● FDA (CDRH) 警告标签 (等级 II)
警告
• • •
● JIS/IEC 警告标签 (等级 2)
• • •
项目 型号 波长 等级 最大输出 等级 最大输出
JIS/IEC 警告标签仅包含在等级 2 的激光产品内。 在日本使用 GV 系列时, 将警告标签贴在显著位置, 例如将 JIS 警告标签附在 警告标签之上。 FDA (CDRH)
绝缘板 感测头
乥䘧োᣛ冫♃ ዄؐ˄㓓㡆˅ 䈋ؐ˄㑶㡆˅
䆒ᅮؐ/ᔧࠡؐᰒ冫
ᣝ [MODE]˄ᓣ˅ ᣝ䪂ߛᤶ 乥䘧˄乥䘧োᣛ冫♃˅DŽ
ዄؐ/䈋ؐᰒ冫
ᣝ [ ] ㆁ༈ᣝ䪂䞡䆒ዄؐ䈋ؐDŽ
在主屏幕上同时按下 [∆] 和 [∇] 箭头按钮使当前值 (红色) 为 0* 。 请参见本使用手册第 9 页 “切换目标值设定” 。 * “9. 关于默认设定细节, 注 当频道号 1 亮起, 显示控制输出 1 (黑色线) 设定值。 当通道号 2 亮起, 显示控 制输出 2 (白色线) 设定值。 在 F-2 模式下的操作是不同的。(关于此请参见使用手册第 5 页。 )
750 至 0 2
显示值表明了距离的指导方针且不应作为测量的实际应用使用。
3
GV-IM-CS
范例 使用感测头 GV-H130 时
基准面 (DATUM) 校准 在 2 点校准过程中 , 当不能正确执行比较器输出时 (由于工件表面颤振等问 题) 使用 DATUM 校准。
距离
六角头螺钉 (附件)
● 当前值和显示分辨率
在默认状态下, 当工件位于最大检测距离时当前值显示为 0。 将工件逐渐移近感 测头会提高显示值, 直到工件位于最小检测距离。 项目 当前值
基恩士PLC手册

4
使用手册的构成 1章 2章 3章 4章 5章 6章 7章 8章 9章 10章
KV-1000 系列的配置 介绍 KV-1000 系列的系统组态、 各单元的各部名称和功能以及技术规格 和规格
等。
访问窗
本章将介绍能够更改数据、 简单实现监控的访问窗。
存储卡
介绍存储卡。
中断处理功能是指在 KV-1000 运转过程中, 外部输入以及高速比较器等出
■ KV-1000 系列相关使用手册
使用 KV-1000 系列 PLC 时, 应同时阅读以下的手册。 请与刊登在本手册封面后的本公司销售部取得联系, 索取这些手册。
手册名称
梯形图支持软件 KV STUDIO / KV BUILDER 安装手册 KV-1000 系列 PLC 入门手册 KV-1000 系列 PLC 用户手册 KV-1000 系列 PLC 编程手册 梯形图支持软件 KV STUDIO 用户手册 KV-1000 系列 PLC 指令参考手册 KV-1000 系列 PLC 系统宏手册
手册内容
主要介绍有关 KV STUDIO 及 KV BUILDER 的安装方法。 本手册为 KV-1000 的主要用户简要说明了基本性能及操作方法。 介绍 KV-1000 的技术规格、 内置功能、 操作方法等。 主要介绍了有关 KV-1000 梯形图编程方法、 模块 / 宏及局部软元件。 介绍 KV STUDIO 的操作方法。 介绍 KV-1000 PLC 的相关指令。 介绍 KV-1000 PLC 所使用的系统宏。
2
■ 与 CE 标识相关的注意事项
在满足以下条件时, 本公司评估相对于 EU 指令要求事项的适合性, 并确认本产品符合其要求事项。 所以, 在 EU 各国使用本产品时, 请务必满足以下条件。
Keyence KV5000 PLC 连接指南说明书

◎Revision RecordKeyence KV5000 Ethernet此技術文件用於說明當使用觸控屏時,如何與Keyence控制器KV 5000系列產品正確進行連線以及相關設置需要注意的事項。
(適用於KV 5000 Ethernet通訊連線,本文件以KV-5000實測)1、選擇Etherner 3、選擇電腦網路卡4、開始偵測2、自動偵測5、搜尋到的PLC1、點擊KV-50002、設定PLC IP3、設定PLC PORT(預設8501)PLC 參數設定即可HMI Setting1.選擇Device/Server Setting: Keyence Corp. --- KV-5000 設定通訊設定: 預設埠為”8501”PLC Device ListBit Devices:Word Devices:~Thank You~Technical Support Information中國大陸QQ專線 : 800014850 / 資料下載專區 ftp::// + User name + Password (欲加入會員需要申請)合作貼牌聯絡專線: China: 0910011916 / 86-138******** *****************Taiwan: 886-910011915 *****************Worldwide: 886-910011914 *****************Cermate Technologies (Shanghai) Inc. 屏通科技(上海)有限公司Phone: +86-21-51758590~2FAX : +86-21-51758589E-mail: ************************Shenzhen Cermate Technologies Inc. 屏通科技(深圳)有限公司Phone: +86-755-83562179,FAX : +86-755-83562294E-mail: **********************Cermate Technologies Inc. (台湾) 屏通科技股份有限公司7F-1, No. 168, Lien-Cheng Road, Chung-Ho City, Taipei, Taiwan 235 R.O.C.Phone: 886-2-22437000FAX : 886-2-22499933E-mail: *******************。
基恩士视觉系统操作手册之应用实例与故障处理

基恩士视觉系统操作手册之应用实例与故障处理一、应用实例基恩士视觉系统是一种先进的工业自动化技术,可以广泛应用于各行各业。
下面将介绍几个常见的应用实例,以帮助用户更好地理解和应用基恩士视觉系统。
1. 产品外观检测基恩士视觉系统可用于产品外观检测,例如在汽车制造行业中用于检测车身表面的划痕、漆面质量、装配零件的位置等。
操作步骤如下:a) 打开基恩士视觉系统软件,选择相应的模板。
b) 将需要检测的产品放入视觉系统的拍摄区域。
c) 运行视觉系统,系统将自动拍摄产品图像,并根据预先设定的检测标准进行分析。
d) 结果将以图像或数据的形式显示在屏幕上,方便工作人员判断产品是否合格。
2. 零件定位基恩士视觉系统在零件定位方面具有广泛的应用。
例如,在手机制造行业中,需要使用视觉系统来定位电池盖的位置,确保每个手机的组装位置准确无误。
操作步骤如下:a) 打开基恩士视觉系统软件,选择相应的模板。
b) 将需要定位的零件放入视觉系统的拍摄区域。
c) 运行视觉系统,系统将自动拍摄并分析图像,确定零件的位置。
d) 将定位结果发送给机器人或其他自动化设备,以实现精确的零件定位。
3. 产品计数在生产过程中,需要对产品进行计数以保证生产数量的准确性。
基恩士视觉系统可以实现自动计数,并确保数据的准确性。
操作步骤如下:a) 打开基恩士视觉系统软件,选择相应的模板。
b) 将需要计数的产品放入视觉系统的拍摄区域。
c) 运行视觉系统,系统将自动拍摄并分析图像,根据预设的计数规则进行计数。
d) 结果将以数字的形式显示在屏幕上,方便工作人员进行产品数量核对。
二、故障处理基恩士视觉系统可能会遇到一些故障或问题,下面将介绍常见的故障及其处理方法,以帮助用户解决问题。
1. 视觉系统显示异常如果观察到视觉系统显示异常,如图像模糊、颜色失真等问题,可以尝试以下解决方法:a) 检查摄像头是否清洁,如果有灰尘或污垢应及时清理。
b) 确保摄像头与被拍摄物体之间的距离适当,过远或过近可能导致图像质量下降。
CV-5000(KB10)中文说明书
安装近用视力测试杆和近用视力测试卡……………………………………………………… 15 安装面罩和前额托……………………………………………………………………………… 15 水平调整………………………………………………………………………………………… 16 固定倾斜的头…………………………………………………………………………………… 16 近用视力测试卡………………………………………………………………………………… 18 操作仪器………………………………………………………………………………………… 19 测量屏(以 KB - 50 为例)…………………………………………………………………… 20 打印输出………………………………………………………………………………………… 21
检查过程 ……………………………………………………………………………………………… 24
用雾视方法检查 …………………………………………………………………………………25 精确测量散光轴和散光度(使用交叉柱镜时)……………………………………………… 26 精确测量球镜度大小(红、绿测试)………………………………………………………… 27 双目平衡测试 ………………………………………………………………………………… 28 测量隐斜(远点)……………………………………………………………………………… 29 测量结果总结 ……………………………………………………………………………… 31 测老花…………………………………………………………………………………………… 31 其它检查 ……………………………………………………………………………………… 32 度数变换 ……………………………………………………………………………………… 32
视觉系统CV5000系列介绍

全新更快的速度、更高的分辨率、更多的解决方案。
在世界功能最齐全的单机式影像系统影像系统总目录80 年代90 年代2000 2CV 系列影像系统3CV 系列影像系统CV-5000 系列 登场200320042005 年至 2008 年2009 年以后多种多样的单机式影像系统功能(解决问题的能力)通用型号 产品套装VXXV CV-100CV-2600CV-300CV-2100CV-500CV-3000CV-700CV-5000处理速度4CV 系列影像系统单机式影像系统A.C.E.IIP. 12CV-5000 系列P. 06全新CV-3000 系列P. 305CV 系列影像系统历史CV-5000系列CV-3000系列照明镜头周边索引照明镜头显示器和周边设备同轴照明 CA-DX背光照明 CA-DS 低角度照明CA-DL8 mm CA-LH84 mm CA-LS43.5 mm CV-L38 mm CA-LHS88x 微距CA-LM82x 微距CA-LM250 mm CA-LH2516 mm CA-LS1616 mm CV-L16特殊底座8.4" LCD 彩色显示器CA-MP81/MN81CCD 调整台 CA-S20405.5" LCD 彩色显示器CV-M30条形照明CA-DB 环形照明CA-DRLED 照明控制器CA-DC 圆顶照明CA-DD荧光照明 CA-RCA-LM 系列P. 46CA-D 系列P. 36CA-LH 系列P. 47CV-R/CA-R 系列P. 38CV-L 系列P. 48CA-LS/CA-LHS 系列P. 50CA-M 系列P. 53CV-M 系列P. 54CA-S2040 系列P. 556CV 系列影像系统同类产品中的最佳分辨率11x 高速 500 万像素CCD同类中最快3+1 处理器技术 业界最先进的问题解决工具现在再次得到进步。
隆重推出全新的 CV-5000 系列,它能够毫无困难地解决高难度应用。
视觉检验技术2(KEYENCE—基恩士)

照相机 1 捕获的图像照相机 3 捕获的图像照相机 2 捕获的图像照相机 4 捕获的图像
使用一部照相机捕获基板的完整图像
使用一部
2 百万像素的彩色照相机使用四部 2 百万像素的彩色照相机 =
约 8 百万像素
CV-3500 1 部照相机捕获的图像CV-3500 4 部照相机捕获的图像
使用四部照相机捕获基板的完整图像
对比度转换调整菜单
对于为每个单独的检验区域设置指定的对比度范围,此过滤器极其有用
增益调整菜单
此过滤器在捕获图像时执行该过程,因此可产生最佳图像,而不影响处理时间。
B (蓝)等颜色组分的数据。
黑白图像原始彩色图像处理颜色对比后的图像
系列”可以使用颜色对比处理功能产生针对特殊应用场合的高对比度灰度图像。
颜色对比处理是一项图像预处理功能,用于将彩色图像转换为高对比度的灰度图像。
此功能将所选的颜色组分指派为最亮的阴影(白色),然后将其它的颜色组分转换为灰色调。
因此这
脏污脏污脏污
1. 原始图像
2. 收缩后的图像(脏污已消除)
3. 扩大后的图像
4. 实时差分处理后的图像(图像 1 减去图像 3)
实时差分过滤器的原理
通过收缩原始图像消除了脏污。
随后通过将收缩后的图像 2 扩展到图像 3,使之恢复到原始图像的相同尺寸。
从原始图像1中减去图像 3,[本示例中每种过滤器的作用]
KC1-0109 Copyright (c) 2007 KEYENCE CORPORATION. All rights reserved. CVInspection2-KC-L-CS 0129-1 E 642155 Printed in Japan
*642155*。
视觉检验技术3(KEYENCE—基恩士)
案例 2 检测细微凹痕的技术
通过反射物体上的条纹照明检测凹痕。 条纹形状的照明反射到物体上。如果物体表面有凹痕,条纹会扭曲。这种扭曲用 CV-3000/CV-5000 强大的瑕疵检测工具可以轻松检测。
未处理图像
处理后的图像
条纹形状表面照明
CCD
条纹照明 工件
如左图所示放置条纹照明和 CCD,使之发生镜面 反射。如果物体上有凹痕,如上图所示会检测到
偏光镜 B
4
玻璃透明物体等 工件
用于镜头的偏光镜 用于照明的偏光镜
Copyright (c) 2009 KEYENCE CORPORATION. All rights reserved. CVInspection3-KC-L-CS 0129-1 E 642300 Printed in Japan
KC1-0109 * 642300 *
照明被分成薄膜表面反射光
CCD
和物体表面反射光,所以难
以看到物体。
镜面反射光
照明
被薄膜表面反射。
没有使用偏光镜 彩色 CCD 图像
使用偏光镜 • 偏光原理
照明
1
偏光镜 A
2
5 3
透明薄膜表面的 镜面反射光被 减少。
透明薄膜 工件
CCD 使用偏光镜
照明
如果偏光镜被安装在镜头和 照明的前方,通过滤光镜并 被薄膜镜面反射的光会被镜 头前方的滤光镜挡住。这样 可以阻止光进入 CCD,让用 户能在漫反射影响减弱的情 况下捕捉图像。
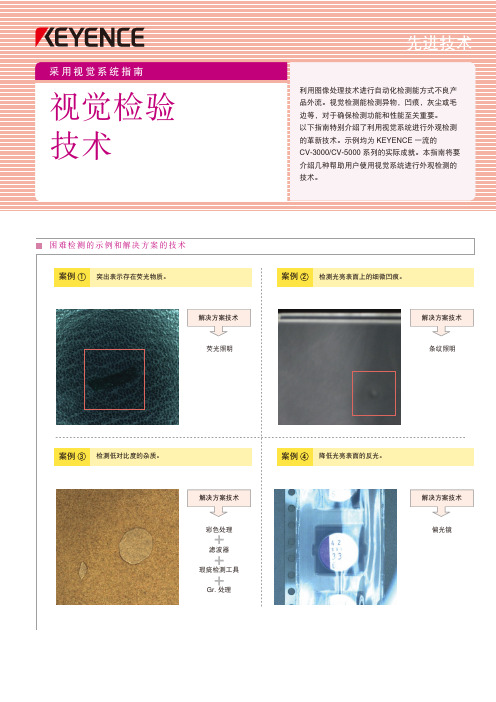
采用视觉系统指南
视觉检验 技术
先进技术
利用图像处理技术进行自动化检测能方式不良产 品外流。视觉检测能检测异物,凹痕,灰尘或毛 边等,对于确保检测功能和性能至关重要。 以下指南特别介绍了利用视觉系统进行外观检测 的革新技术。示例均为 KEYENCE 一流的 CV-3000/CV-5000 系列的实际成就。本指南将要 介绍几种帮助用户使用视觉系统进行外观检测的 技术。
尺寸检验技术1(KEYENCE—基恩士)

俯视
侧视
像素分辨率
进行尺寸检测的视觉系统用户经常要关心最大分辨率的问题。
首先,必须给视觉系统的像素分辨率定义一个概念。
像素分辨率是由相机中
1 个像素宽度
边缘位置以低于 1 个像素来计算。
边缘测量值(像素)
计算边缘检测区域方向上亮度的平均值是为了获得投射波形。
投射波形区分后,峰值的位置被计算作边缘位置。
次像素原理
会有持续进料的应用
目标物在相机的视野范围内持续移动时,需要考虑相机快门的速度。
模糊不清的图像
高速快门图像低速快门图像
快门速度 = 要求容差 [mm] ÷ 生产线速度 [mm/sec.]
*
6
4
2
3
1
*
KC1-0109
Copyright (c) 2007 KEYENCE CORPORATION. All rights reserved. CVDimension1-KC-L-CS 0129-1 E 642301 Printed in Japan。
cr5000的使用
4.1. 建立 FOOTPRINT 库................................................................................................................................ 9 4.1.1. 生成 PAD .............................................................................................................................................. 9 4.1.2. 生成 PADSTACK.................................................................................................................................. 10 4.1.3. 生成 FOOTPRINT................................................................................................................................. 14 4.2. 生成 PACKAGE ..................................................................................................................................... 16 4.3. 建立 PART 元件库 ............................................................................................................................... 16 4.3.1. 生成 FUNCTION .................................................................................................................................. 16 4.3.2. 生成 PIN ASSIGN ................................................................................................................................ 17 4.3.3. 生成 PART .......................................................................................................................................... 18
视觉检验技术1(KEYENCE—基恩士)
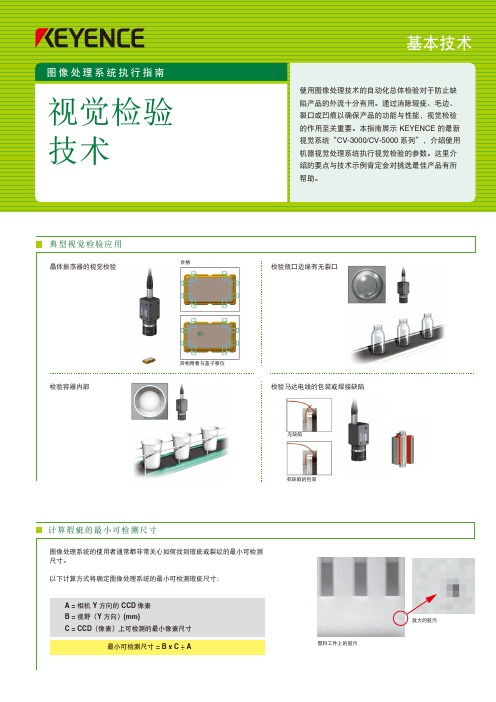
无缺陷有缺陷的包装异物附着与盖子移位检验马达电线的包装或焊接缺陷C =B = 视野(Y)(Y)下表显示不同相机类型与视野所对应的最小可检测尺寸。
假定图像处理系统的最小可检测像素尺寸为理想值,即 2 个像素。
如果最小可检测像素尺寸假定是 4 个像素,则其结果将翻一倍。
上表中的数字仅为理论数字,具体由检测条件而定。
在本示例中,捕获目标的视野 (B) 在 10 mm 至 100 mm 之间不等,具体取决于应用所选定的镜头尺寸。
CCD 的像素数量根据所使用的相机而有所不同。
标准尺寸 24 万像素 CCD 在 Y 方向 (A) 上的像素数量为 480 个像素,而百万像素型,如二百万像素 CCD 的这个数量则是 1200 个像素。
CCD 上最小可检测尺寸 (C) 是1个像素,但最好给瑕疵检测应用设置2 至 4 个像素。
现在来估算一下使用百万像素相机在 60 mm 视野 (B) 时的最小可检测瑕疵尺寸。
假定最小可检测像素尺寸 (C) 为理想值,即 2 个像素。
如果将A = 1200 个像素、B = 60 mm 、C = 2 个像素指定给前述公式:相机24 万像素200 万像素CCD 的像素数量(Y 方向)480 个像素1200 个像素视野 [mm]1030501002005000.040.130.210.420.83 2.080.020.050.080.170.330.83基本原理最小可检测尺寸 = 60 x 2 ÷ 1200 = 0.1 mm图像模糊高速快门图像低速快门图像例如:要求的最小可检测瑕疵尺寸 = 1 mm生产线速度 = 1 m/sec.快门速度 = 1 mm ÷ 5 ÷ 1000 mm/sec. = 1/5000理想的快门速度是 1/5000。
最大生产线速度LED 上的瑕疵S检测原理(当检测方向指定为X时)KC1-0109 Copyright (c) 2007 KEYENCE CORPORATION. All rights reserved. CVInspection1-KC-L-CS 0129-1 E 642154 Printed in Japan*642154*。
基恩士安全光栅说明书

简介本使用手册提供了有关 SL-V 系列安全光栅(“SL-V”)的装卸、操作与安全预防措施等方面的信息。
操作 SL-V 之前应认真阅读本手册以了解该装置的有关功能,并将其妥善保管以备随时查阅。
确保本产品的最终用户也能收到本手册。
在本使用手册中,“SL-VH” 代表具有 φ25mm 检测能力的手保护类型,“SL-VHM”代表具有 φ25mm 检测能力的手保护和坚硬外壳类型,“SL-VL” 代表具有 φ45mm 检测能力的主体保护类型,“SL-VF”代表具有 φ14mm 检测能力的手指保护类型以及“SL-V”代表包含 SL-VH,SL-VHM,SL-VL 和 SL-VF 的所有型号。
本手册使用了以下标题用于说明有关安全方面的重要信息。
无论何时,均应严格遵守这些标题旁边的指示。
不遵守这项指示,可能导致机器操作人员的重大伤亡事故。
不遵守这项指示,可能损坏 SL-V 或其所应用的机器。
为正确操作而提供的附加说明。
为正确操作而提供先进和有用的信息。
安全预防措施•在工作和操作此装置之前,应检查其功能和性能是否正常。
•如果未按照本使用手册中 SL-V 的规格进行使用,或私自对其进行改造,KEYENCE 公司将不对 SL-V 的功能与性能进行任何担保。
•当使用 SL-V 来保护机器操作人员远离危险区域或危险部位、或无论出于什么目的将它用作安全装置时,应始终注意遵守 SL-V 使用所在国家或地区的法律的所有适用要求、规则、规定和标准。
有关的具体规定,请直接与所在国家或地区的职业安全与卫生管理机构联系获得。
•根据安装 SL-V 的机器类型的不同,还必须遵守涉及 SL-V 的使用、安装、维护和操作等方面的一些特殊安全规定。
负责安装 SL-V 的人员必须严格遵守这些安全规定。
•本装置负责人须对指定从事 SL-V 的使用、安装、维护与操作的人员进行有关培训。
“机器操作人员”是指受过专项培训并具备正确操作能力的人员。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
视觉系统控制器激光刻印机外壳防护等级通信方法测量仪器环境光 (阳光/照明光) 由目标反射,反射光通过镜头汇聚。
目标图像聚焦在 2D CCD 摄像元件上。
与亮度成比例的视频信号 (模拟信号) 从 CCD 摄像元件发送到控制器。
控制器根据模/数转换后的数据 (8 位 = 256 级) 检测目标面积、形状或位移方面的差异。
1. 图像处理图像处理是将 CCD 照相机所捕获的目标图像转换成数字信号,然后对该信号执行各种算术运算,从而提取目标的特性,如面积、长度、质量及位置等。
最后,根据预设的容差极限输出微分结果。
图像处理流程图1. CCD 照相机的图像输出如右图所示,在摄像元件 (CCD) 聚焦的目标图案作为电荷存储,此电荷与图像每个部分的亮度 (入射光线量) 成比例。
随后从边缘顺序读取 (扫描) 此数据,接着转换成级别 (亮度/暗度信息) 随时间而变化的图像信号。
图像信号作为视频信号与垂直同步信号 (它定义画面的起点) 和水平同步信号 (它定义扫描线的起点) 一起输出。
这些同步信号对于重新构造图像必不可少。
2. 图像处理基础知识控制器激光刻印机外壳防护等级通信方法测量仪器视觉系统2. 图像扫描扫描是通过从画面左上角开始依次向下描绘水平线,从而将 CCD 捕获的图像传输到 CRT 。
每条线都称为扫描线。
有两种 NTSC (National Television System Committee ,中译“美国国家电视制式委员会”) 扫描标准: 逐行与隔行。
逐行扫描从扫描线 1 依次扫描到扫描线 525,然后再次从扫描线 1 开始,每秒 30 次,如 “图 1” 所示。
隔行扫描首先扫描编号为奇数的扫描线 (奇数场),然后扫描编号为偶数的扫描线 (偶数场),如 “图 2” 所示。
图像区域每秒扫描 60 次,但由于一次只扫描一半的扫描线,因此整个画面区域 (称为帧) 的扫描帧速率是每秒 30 帧。
CV 系列遵循NTSC标准的逐行扫描。
图 1:逐行扫描图 2:隔行扫描3. 二值数字转换照相机发送的视频信号是模拟信号。
要将视频信号用于各种微分与测量,必须将模拟信号转换成数字信号。
要将视频信号从模拟信号转换成数字信号,需要为它设置一个阈值水平。
比阈值水平更亮的区域定义为 “白色”,比二值水平更暗的区域定义为 “黑色”。
对应于白色像素的数字信号定义为 “1” (= HI ),对应于黑色像素的那些则定义为 “0” (= LO)。
4. 像素照相机发送的视频信号包含随时间而变化的亮度/暗度信息。
不过,时间 (画面上的位置) 无法使用此信号来确定。
如果根据具有指定频率的时钟脉冲来划分扫描线 (如前一栏所示),则可以确定画面上的水平位置。
由于垂直位置本来就可以由扫描线编号确定,因此画面被划分成网格状。
网格中的每个元素都称为一个像素。
目标图像可以看作是白色与黑色像素的组合。
所有的处理工作都基于像素执行。
5. 灰度处理除二值转换法之外,图像处理器件中还使用灰度处理法。
CV 系列采用灰度处理法,此方法基于照相机所捕获的图像的亮度渐变数据。
二值转换法仅能识别白色或黑色 (1 或 0) 数据。
灰度处理方法将亮度渐变分成 8 位 (256 级),并根据所有的数据来获得微分结果。
因此,此方法能够提供更好、更精确的检测。
控制器激光刻印机外壳防护等级通信方法测量仪器视觉系统6. 颜色处理 (通过颜色提取进行颜色二值转换)来自照相机的彩色视频信号由图像的模/数转换过程转换成 RGB 数字数据。
此数据用于进行微分运算,以便从接收到的 RGB 数据中获得 R- (负号)、G 、B-G 以及 R-B 数据。
这六个颜色信息参数用于检查与指定颜色的匹配程度。
这是通过以下方法实现的: 在画面上设置范围,然后提取与前面指定颜色相匹配的颜色。
接着,以二值方式将每个像素转换成提取的像素或不提取的像素。
这种微分运算处理确保即便对于很暗的颜色与高速处理,提取过程也非常稳定。
7. 颜色浓淡级别处理颜色信息数据分为 256 个级别。
根据提取的颜色,将各种颜色分成 256 个级别。
提取的颜色指定为 255 级,颜色浓淡同提取的颜色差别越大的其它颜色指定为越靠近 0 级。
与颜色二值转换不同,颜色浓淡级别处理利用 256 级浓淡数据,因此即便目标的颜色由于个体差异而有所不同时,检测过程也非常稳定。
与颜色二值转换相似,这六个参数也用于内部运算。
示例:红色 (R) 的情况如下文阐述。
(这些阐述同样适用于其它参数)。
颜色浓淡级别处理的特点1. 即便是在环境亮度发生改变或是目标的颜色由于个体差异而有所不同时,颜色浓淡级别处理也确保能得到比二值转换更稳定的检测结果。
2.由于颜色浓淡级别处理利用 256 级数据,因此对于位置测量,它比二值处理更高效。
(可以进行子像素处理)。
8. 滤镜处理基础知识术语 “滤镜处理” 是指为了增强图像上的某些特定特征而应用于原始捕获图像的修改。
典型情况下,滤镜将根据从周围像素 (使用所修改像素周围的 3 x 3 区域) 收集到的信息来更改单个像素的属性。
三个图像 (0 至 255 色调) 都在垂直与水平方向上进行滤镜处理。
对 512 x 480 像素进行滤镜处理,需要进行 240,000 次。
扩展滤镜“扩展”滤镜将使用周围 3 x 3 像素网格中的最亮值替换中心像素。
此种处理有助于消除暗色的噪点成分。
(请参阅下面的示意图)。
收缩滤镜相反,“收缩” 滤镜则使用周围九个像素中的最暗值替换中心像素。
此种处理有助于消除亮色的噪点成分。
(请参阅下面的示意图)。
诸如灰尘或污垢之类的细微缺陷可以使用 “扩展” 滤镜进行消除,或是使用 “收缩” 滤镜进行增强。
3 乘 3 像素滤镜原理示意图滤镜处理示例原始图像经过 “扩展” 滤镜处理经过 “收缩” 滤镜处理控制器激光刻印机外壳防护等级通信方法测量仪器视觉系统1. 图案匹配识别图像的图案参考图像的目标图案注册并存储在图案窗口中。
随后,图案窗口从左上角向右下角扫描指定的搜索窗口,以便检测同已注册图像最匹配的位置。
参考图像注册的图像搜索检测“搜索” 使用灰度处理的图案匹配图案匹配功能使用灰度图像处理方法 (它给每个像素指定 256 级灰度),从而识别目标的图案。
相反,二值处理仅将图像识别成黑色与白色。
参考图像照相机捕获的图像Y 坐标X 坐标Y 坐标X 坐标256 级概念图使用颜色提取的图案匹配CV-3000/700 系列彩色影像系统在识别存储在图案窗口中的图案时,不但使用亮度,而且还使用 RGB 技术 (它给每个像素指定 256 级颜色)。
CV-3000/700 系列最适合用于检测形状相同但颜色不同的目标。
PROGWINDOW 1COLOR MEASURE 248,168 378,236MASK– – –, – – – – – –, – – –DETECT MEASURE 001329 TOL H=000000L=000000T=000017RAW SCRN �参考图像参考图像2.子像素处理一般的图像处理是在 1 个像素单位上执行,而子像素处理方法则是在 0.1 像素单位上执行位置检测。
这样便可以实现高精度位置检测,从而将应用范围扩展到高精度定位以及位置测量方面。
顶点位置可以精确检测到。
顶点位置无法精确检测到。
分辨率高达传统方法的 10 倍。
3. 正规化相关方法不受亮度变化影响的精确图案匹配。
灰度图案匹配方法将参考图像图案的每个像素识别为 256 级灰度之一,然后比较此数据与画面上的图像的信息,从而检测位置。
不过,由于灰度数据的绝对值很容易受到环境光变化的影响,使用此方法有时很难精确地检测位置。
3. 图像处理原理控制器激光刻印机外壳防护等级通信方法测量仪器视觉系统投影波形级)(0 级)投影方向正规化相关方法可以实现稳定的图案匹配,而不受环境光的影响。
如下面的图片所示,参考图像与输入图像的每个像素的亮度 (灰度数据) 都减去整个图像的平均亮度。
这就是所谓的正规化,它可以消除两个整幅图像的亮度差异。
随后,图像被放到参考图像与输入图像的图案最匹配 (即相关度最高) 的位置,从而精确检测到图像中目标图案的位置。
传统方法PROGWINDOW 1COLOR MEASURE 248,168 378,236MASK– – –, – – – – – –, – – –DETECT MEASURE 001329 TOL H=000000L=000000T=000017RAW SCRN �PROGWINDOW 1COLOR MEASURE 248,168 378,236MASK– – –, – – – – – –, – – –DETECT MEASURE 001329 TOL H=000000L=000000T=000017RAW SCRN �参考图像输入图像图像太暗,搜索不到。
正规化相关方法PROGWINDOW 1COLOR MEASURE 248,168 378,236MASK– – –, – – – – – –, – – –DETECT MEASURE 001329 TOL H=000000L=000000T=000017RAW SCRN �PROGWINDOW 1COLOR MEASURE 248,168 378,236MASK– – –, – – – – – –, – – –DETECT MEASURE 001329 TOL H=000000L=000000T=000017RAW SCRN �正规化之后,图像可以搜索,以便进行图案匹配。
4. 边缘检测通过在图像画面上设置边缘检测窗口,您可以在图像范围内确定亮度发生变化的部分,并将它识别为边缘。
此方法对于检测边缘的绝对坐标或检验工件的尺寸均非常有效PROGWINDOW 1COLOR MEASURE 248,168 378,236MASK– – –, – – – – – –, – – –DETECT MEASURE 001329 TOL H=000000L=000000T=000017RAW SCRN ●PROGWINDOW 1COLOR MEASURE 248,168 378,236MASK– – –, – – – – – –, – – –DETECT MEASURE 001329 TOL H=000000L=000000T=000017RAW SCRN ●X-Y 表5. 边缘检测原理从本质上说,“边缘” 是出现在图像中的明、暗区域之间的边界。
在图像中,对比度的变化超过用户预先设置的对比度极限的任何区域上都将有一个边缘。
检测边缘时使用以下三个处理步骤:1. 应用投影处理将投影处理应用于测量区域内的图像。
投影处理表示沿着垂直于预先确定的检测方向扫描图像,然后获得每条投影线的平均强度。