Botball04 舵机和电机使用
球形机器人的操作方法

球形机器人的操作方法
球形机器人的操作方法一般包括以下几个步骤:
1. 打开机器人电源和遥控器。
确认机器人和遥控器的电量充足。
2. 将机器人放在平坦且宽敞的空间中,确保其周围没有障碍物,以保证机器人的运动安全。
3. 通过遥控器控制机器人运动。
普通球形机器人的遥控器通常有四个按键,可以控制机器人的前进、后退、左转和右转。
4. 如果球形机器人还具备其它功能,比如舞蹈、语音交互等,也可以通过遥控器或者APP进行控制。
5. 在操作过程中需要注意遥控器与机器人之间的距离和互动信号的强度,以避免操作不稳定或者间歇性断开。
6. 操作完成后要及时关闭机器人和遥控器的电源,同时保持清洁和维护,以延长机器人的使用寿命。
众灵科技舵机使用手册

众灵科技舵机使用手册摘要:1.众灵科技舵机的概述2.众灵科技舵机的安装与设置3.众灵科技舵机的使用技巧与注意事项4.众灵科技舵机的维护与故障排除5.众灵科技舵机的技术参数与规格正文:【众灵科技舵机的概述】众灵科技舵机,全称众灵科技舵机控制器,是一种高性能的舵机控制器,适用于各种遥控模型、机器人和智能家居设备。
它采用先进的控制算法和技术,为用户提供精准、稳定的控制体验。
【众灵科技舵机的安装与设置】在安装众灵科技舵机之前,请确保您已详细阅读产品说明书。
安装过程如下:1.根据设备需要,选择合适的舵机型号。
2.将舵机与设备主体连接,确保连接处牢固。
3.连接电源,检查舵机是否正常工作。
4.使用配套的遥控器或控制器,对舵机进行初始化设置。
【众灵科技舵机的使用技巧与注意事项】在使用众灵科技舵机时,请注意以下几点:1.熟悉遥控器或控制器的操作方法,确保能够精准控制舵机。
2.在使用过程中,避免舵机受到剧烈冲击或长时间工作,以免影响使用寿命。
3.定期检查舵机的连接处,确保连接牢固。
4.如遇异常情况,请立即停止使用,并联系专业技术人员进行处理。
【众灵科技舵机的维护与故障排除】在使用众灵科技舵机的过程中,可能会遇到一些故障。
以下是一些常见故障及排除方法:1.舵机无法正常工作:请检查电源连接是否正常,遥控器或控制器是否存在故障。
2.舵机运行不稳定:请检查连接处是否牢固,遥控器或控制器的操作是否准确。
3.舵机出现异常声音:请检查舵机内部是否有异物,或轴承是否损坏。
【众灵科技舵机的技术参数与规格】众灵科技舵机具有以下技术参数和规格:1.工作电压:DC 4.8-7.4V2.工作电流:100-150mA3.旋转角度:90°-360°4.信号接收频率:2.4GHz-2.5GHz5.外形尺寸:根据不同型号,具体尺寸会有所不同通过以上介绍,相信您已经对众灵科技舵机有了全面的了解。
零零狗机器人舵机控制板与舵机控制软件使用教程_调试环境建立
编者寄语:参考本教程进行操作前,请认真研读本注意事项,否则由于错误操作导致的任何问题,包含机器人硬件损坏、电脑硬件损坏、人员伤亡(我们不排除由于某个芯片烧毁导致某些人心脏病复发这类蝴蝶效应的发生)等,与本人以及相关硬件与软件无关,损失自负。
总之,我写这份教程的最终目的是为了让大家更好的上手机器人调试,为大家解决问题。
希望大家本着负责任的态度学习此教程,预祝大家都可以在比赛中获得更好的成绩!注意事项:1.连接舵机与舵控板前,请关闭机器人电源并断开机器人与电脑的USB连接。
2.使用电脑调试机器人时,当打开串口后,请勿在关闭串口前断开机器人与电脑之间的USB连接,否则会导致软件崩溃。
3.舵机控制线不要反接,调试过程中不要让舵机卡死,否则很容易烧毁舵机(随便说一下,所谓的调试经验:耐心、细心、仔细、一定的专业知识,长时间的调试的经验积累,通过视频或者现场向高手学习,调试过程中烧毁一些硬件设备,我们已经习以为常了,即使是高手也会出现错误,我们要避免低级错误,但是我们也不能停下创新的脚步)4.不要在上电的情况下用手触碰舵机控制板,最好对舵机控制板进行一些绝缘处理(热熔胶和绝缘漆是不错的选择,当然也要注意散热问题),机器人上有很多金属件,很容易在运动过程中造成短路。
5.控制器硬件以及软件将不断更新,修复其中的BUG,也感谢大家将调试中出现的问题反馈给我。
(本人邮箱:745312673@)6.有很多使用者向我反馈,电脑的硬件驱动不能识别(之前我们以对XP的32位系统,XP英文版64位系统(国内未发行),win7的32位系统与64位系统,win8的32位系统与64位系统进行过完整的测试,不存在软件兼容问题),可能是控制板硬件的固件没有升级,如果不是上述原因的话,我只能建议你重装系统了,我自己也重装过,win7 64位sp1补丁旗舰版。
重装系统是最快最有效的解决方法!我也正在尝试找到其中的原因,希望大家谅解。
7.调试机器人的时候常常会出现螺丝松动,请及时紧固相关松动的螺丝,否则一颗松动的螺丝将会在调试或者比赛中导致意想不到的灾难。
众灵科技舵机使用手册
众灵科技舵机使用手册(实用版)目录1.众灵科技舵机的概述2.众灵科技舵机的安装与设置3.众灵科技舵机的使用技巧4.众灵科技舵机的维护与保养5.众灵科技舵机的常见问题与解决方法正文一、众灵科技舵机的概述众灵科技舵机,全称众灵科技遥控舵机,是一种高性能的遥控设备,广泛应用于无人机、机器人、航模等领域。
它采用先进的技术,具有精度高、反应速度快、稳定性强等优点,能够为各种设备提供精确的控制。
二、众灵科技舵机的安装与设置1.安装:在安装众灵科技舵机时,需要根据设备的具体接口选择合适的连接线,然后将舵机与设备连接。
此外,还需要根据设备的要求,正确安装舵机的驱动板和编码器。
2.设置:安装完成后,需要对舵机进行参数设置。
可以通过设备上的软件或者第三方软件进行设置。
设置时需要根据设备的具体参数进行,以保证舵机能够正常工作。
三、众灵科技舵机的使用技巧在使用众灵科技舵机时,需要掌握一些基本的使用技巧,以提高控制效果。
主要包括:1.熟悉遥控器:遥控器是控制舵机的主要工具,需要熟悉其各个按键的功能和使用方法。
2.掌握舵机的工作原理:了解舵机的工作原理,可以帮助用户更好地掌握舵机的控制技巧。
3.练习控制:在实际使用前,需要进行充分的练习,以提高控制精度和反应速度。
四、众灵科技舵机的维护与保养为了保证众灵科技舵机的正常工作和延长使用寿命,需要进行定期的维护和保养。
主要包括:1.清洁:定期清洁舵机,去除灰尘和污垢,以保证舵机的正常工作。
2.润滑:定期给舵机的转动部位润滑,以减少摩擦,提高转动速度。
3.检查:定期检查舵机的各个部件,发现损坏或者异常情况时,及时进行更换或者维修。
五、众灵科技舵机的常见问题与解决方法在使用众灵科技舵机时,可能会遇到一些常见问题,如无法正常启动、控制不准确等。
针对这些问题,可以采取以下解决方法:1.无法正常启动:检查舵机的连接线和驱动板是否正常,如果发现问题,及时进行更换或者维修。
2.控制不准确:检查遥控器和舵机的参数设置是否正确,如果发现问题,及时进行调整。
FUTABA 4PL功能简介以及说明书

SWITCH
开关功能
开关的功能选择
P-62
PROG MIX
通道混控
任何通道之间的可编程混控
P-66
A.B.S
防抱死刹车系统
防抱死刹车系统设置
P-68
BRAKE MIX
刹车混控
为1:5车等有前后独立刹车系统的模型所提供的刹车混控
P-72
4WS MIX
四轮独立混控
四轮独立混控
P-74
DUAL ESC
TIMER
计时器
计时/倒计时/圈数计时功能
P-86
LAP LIST
圈数统计
查看圈数数据(每圈时间/总时间)
P-92
SYSTEM
系统设置
LCD屏幕对比度/背光/电池类型/蜂鸣器/闲置警报/语言显示的设置
P-93
ADJUSTR
数据修正
转向和油门修正
P-97
FUTABA 4PL功能简介以及说明书
功能缩写
功能描述
对应页码
MODEL RX
模型数据/传输模式
调用/复制/重置模型数据
接受传输模式和舵机工作模式选择
P-38
REV
舵机反向
舵机反向设置
P-44
SUBTR
中位调整
舵机中位调整PΒιβλιοθήκη 45EPA行程调整
行程调整
P-46
F/S
失控保护
失控保护/电压保护
P-49
双ESC混控
前后电子调速器混控
P-76
THR MODE
油门模式
油门前进后退的功率设置/刹车中立点设置/发动机启动延迟设置/开关控制发动机关闭的设置
P-78
MC LINK
众灵科技舵机使用手册

众灵科技舵机使用手册一、产品概述众灵科技舵机作为一种电动执行器,广泛应用于航模、机器人、家居智能等领域。
它采用了先进的伺服控制技术,具有高效、稳定的性能,能够精准控制转动角度和扭矩输出。
本手册将全面介绍众灵科技舵机的功能特点、使用方法及注意事项,以帮助用户正确、安全地使用舵机。
二、产品特点1. 高精度:众灵科技舵机采用优质电机和精密齿轮组件,能够实现0.1°的精确控制,满足高精度控制需求。
2. 高扭矩:舵机具有出色的扭矩输出性能,能够稳定输出强大的扭矩,适用于各类负载要求。
3. 高速度:采用先进的控制算法和电子调速技术,舵机具有快速的响应速度,能够快速完成位置控制。
4. 多功能:舵机支持多种控制模式,包括位置控制、速度控制、力矩控制等,可满足不同应用需求。
5. 稳定可靠:产品采用高品质的材料和先进的制造工艺,具有稳定可靠的性能,长时间运行不易发生故障。
三、使用方法1. 连接电源:将舵机的电源线连接至适配的直流电源,确保电压和电流符合舵机的要求。
2. 连接控制信号:将舵机的信号线连接至控制器的相应接口,确保连接正确、稳固。
3. 编程控制:使用控制器进行编程设定,设定舵机的转动角度、速度、力矩等参数。
4. 安装调试:安装舵机到应用设备上,确保连接稳固,进行初步调试,验证舵机的性能。
5. 细致调节:根据实际需求,对舵机的各项参数进行微调,以达到最佳的控制效果。
四、注意事项1. 请勿超负载使用:在使用舵机时,应根据其额定扭矩和转动角度来选择合适的应用场景,避免超负载使用,以免损坏舵机。
2. 避免反接电源:在连接电源时,请务必正确连接正负极,避免反接电源导致舵机损坏。
3. 防水防尘:舵机并非防水产品,在安装使用时应将其放置在通风干燥的环境中,避免受潮或进水。
4. 避免震动:在使用过程中应避免过大的震动或冲击,以免影响舵机的精准控制。
5. 必要的维护:定期对舵机进行清洁、润滑和检查,保持其稳定可靠的性能。
Botball04 舵机和电机使用

1000
电机被分成了1000 个tick
750
250
500
让机器人小车动起来
ห้องสมุดไป่ตู้
基础目标: 编程控制机器人以800tick每秒的速度前进 流程图
两秒,然后停下来。
Begin
挑战目标:让机器人小车前进两秒转弯返回。
Drive forward at 800.
伪代码
1.小车前进,速度800tick. 2.保持两秒. 3.停止电机. 4.结束程序.
mav(0, 800);
// Move motor on port #0 at 800 ticks/sec.
• 驱动机器人时不依赖于电量高低,更精准 • 需要和 msleep 函数准确配合.
最基础的控 制电机函数
控制电机的函数
电机端口 ( 0 - 3)
mav(0, 500); // 控制0号端口的电机以每秒500 ticks的速度正转 // (速度取值-1500 到 +1500)
3. Set servo position to counter.
// 4.3 Set servo position to counter.
5.Disable servos.
// 5. Disable servos.
6.End the program.
// 6. End the program.
用循环控制舵机缓抬
用循环实现舵机缓抬, 避免出现舵机快速转动。
int main() {
int counter = 200;
set_servo_position(0, counter);
enable_servos();
// Is counter < 1800? while (counter < 1800) {
众灵科技舵机使用手册

众灵科技舵机使用手册一、引言感谢您选择众灵科技舵机产品!为了让您更好地了解和使用我们的产品,特编写此使用手册。
请您仔细阅读并遵循以下说明,以确保产品的正确安装、操作和使用。
同时,我们也希望通过此手册,为您提供实用的解决方案和优质的用户体验。
二、产品概述1.产品名称与型号本手册所涉及的舵机产品名称为“众灵科技舵机”,型号为XXXX。
2.产品功能与特点众灵科技舵机具备以下功能与特点:(1)高精度:采用高精度传感器,实现精确控制。
(2)高速度:响应速度快,满足高效生产需求。
(3)高稳定性:采用优质材料和精湛工艺,确保产品长期稳定运行。
(4)易于操作:人性化设计,使操作更加简便。
3.适用场景众灵科技舵机适用于各类工业自动化设备、机器人等领域,如输送线、装配线、仓储自动化等。
三、产品安装与调试1.安装步骤(1)准备工作:检查安装环境,确保电源、信号等线路畅通。
(2)拆箱:取出产品,检查包装内配件是否齐全。
(3)安装:按照产品图纸和安装指南,将舵机安装到相应位置。
(4)接线:连接电源、信号等线路,注意接线正确无误。
(5)调试:启动设备,进行初步调试。
2.调试方法(1)静态调试:调整舵机参数,使其满足实际需求。
(2)动态调试:观察舵机运行情况,检查是否存在异常。
四、产品操作与使用1.操作步骤(1)开机:接通电源,启动设备。
(2)设定参数:根据实际需求,设置舵机相关参数。
(3)启动运行:按下运行按钮,开始工作。
2.功能详解(1)舵机控制:通过编程或面板操作,实现舵机的精确控制。
(2)位置检测:具备位置检测功能,便于监测工作状态。
(3)故障自诊断:舵机具备故障自诊断功能,便于及时发现并解决问题。
3.注意事项(1)请在规定的电压范围内使用舵机。
(2)切勿将舵机置于潮湿、高温、易爆等环境中。
(3)操作过程中,请勿触摸舵机的运动部件,以免发生意外。
五、产品维护与保养1.维护方法(1)定期检查舵机零部件,如有损坏,及时更换。
圆点博士小四轴2015P版使用方法

1,接上电池,并打开电源开关,然后把四轴平放在地面。
2,这时候,四轴机架上的LED灯会轮流慢速转动。
Hale Waihona Puke 手持遥控器: 1,利用usb线给手持遥控器供电,上电后,遥控器上的喇叭会。。嘟。。嘟嘟。。。叫。
2,等待5秒,直到喇叭变成。。。嘟。。。嘟。。。的声音。
3,把左手油门杆推到最低,向上摇方向摇杆到最上边,对小四轴进行水平矫正。
4,把左手油门杆推到最低,向右摇方向摇杆到最右边,对小四轴进行解锁。
4,解锁后,小四轴机架上的LED灯会轮流快速转动。
5,然后,推动油门摇杠到中间位置,小四轴即可以起飞。
6,注意,每次起飞前,均要对对小四轴进行水平矫正。
如果要使用手持遥控器实现电脑和小四轴飞行的连接,那么,在手持遥控器上电的5秒内,
向上摇动方向摇杆,这样手持遥控器就会停留在启动模式。这时,打开上位机,就可以在
上位机软件观察到小四轴飞行器的姿态。
舵机操作指南
舵机操作指南
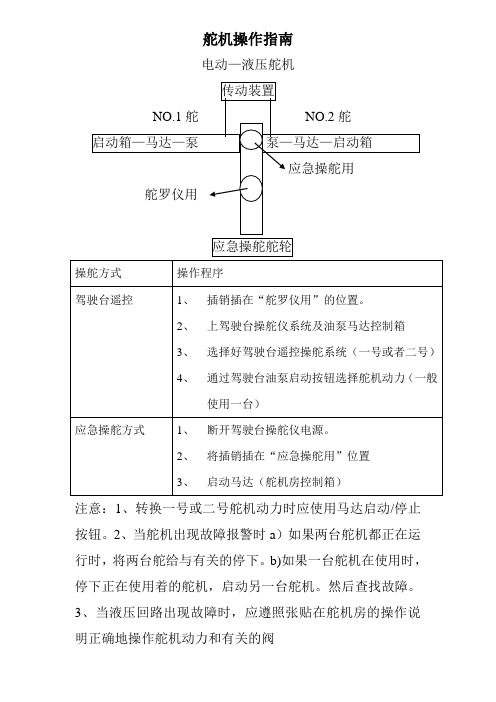
电动—液压舵机 传动装置 NO.1 舵 启动箱—马舵用 舵罗仪用
应急操舵舵轮
操舵方式 驾驶台遥控 操作程序 1、 2、 3、 4、 插销插在“舵罗仪用”的位置。 上驾驶台操舵仪系统及油泵马达控制箱 选择好驾驶台遥控操舵系统(一号或者二号) 通过驾驶台油泵启动按钮选择舵机动力(一般 使用一台) 应急操舵方式 1、 2、 3、 断开驾驶台操舵仪电源。 将插销插在“应急操舵用”位置 启动马达(舵机房控制箱)
注意:1、转换一号或二号舵机动力时应使用马达启动/停止 按钮。2、当舵机出现故障报警时 a)如果两台舵机都正在运 行时,将两台舵给与有关的停下。b)如果一台舵机在使用时, 停下正在使用着的舵机,启动另一台舵机。然后查找故障。 3、当液压回路出现故障时,应遵照张贴在舵机房的操作说 明正确地操作舵机动力和有关的阀
电动液压舵机操作规程
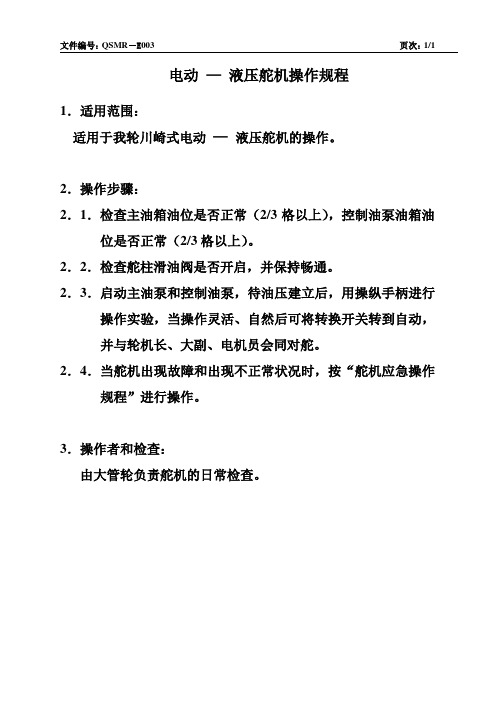
文件编号:QSMR―E003 页次:1/1
电动—液压舵机操作规程
1.适用范围:
适用于我轮川崎式电动—液压舵机的操作。
2.操作步骤:
2.1.检查主油箱油位是否正常(2/3格以上),控制油泵油箱油位是否正常(2/3格以上)。
2.2.检查舵柱滑油阀是否开启,并保持畅通。
2.3.启动主油泵和控制油泵,待油压建立后,用操纵手柄进行操作实验,当操作灵活、自然后可将转换开关转到自动,
并与轮机长、大副、电机员会同对舵。
2.4.当舵机出现故障和出现不正常状况时,按“舵机应急操作规程”进行操作。
3.操作者和检查:
由大管轮负责舵机的日常检查。
电动液压舵机安全操作规程
电动液压舵机安全操作规程电动液压舵机是航空、航海、汽车等行业中广泛使用的一种液压执行机构。
它由电机驱动液压泵,通过液压系统产生的高压液体来控制舵机的运动,实现舵面的转动。
由于电动液压舵机具有较高的危险性,要保证其安全运行,必须按照严格的操作规程进行操作。
以下是电动液压舵机的安全操作规程,以供参考:1. 操作人员必须经过专业培训,并具备相关的操作证书才能进行操作。
2. 在操作前,必须检查舵机的外观是否完好,各个连接点是否紧固,液压泵的工作压力是否正常,并进行必要的维护和保养。
3. 操作过程中,严禁穿戴松散的衣物。
操作者应穿戴符合安全要求的工作服、安全鞋和安全帽。
4. 操作前必须了解舵机的操作原理、工作过程和相关安全注意事项,并保持清醒的状态。
5. 在操作时,应严格按照操作手册中的操作步骤进行操作,严禁随意修改或省略步骤。
6. 操作舵机时,必须站在安全的位置,并保持手、身体和衣物远离舵机活动范围。
7. 操作者必须保持集中注意力,严禁分心、开玩笑或进行其他不相关的活动,以免造成意外伤害。
8. 在操作过程中,严禁将舵机用于超过其额定承载能力的工作,以免导致舵机故障或事故发生。
9. 操作者必须随时注意舵机的工作状态,如发现异常声音、振动或其他异常情况,应立即停止操作,并报告相关人员进行检查和维修。
10. 在操作完成后,必须关闭电源,并将舵机回到初始位置。
操作者应对舵机进行检查,确保其处于正常工作状态。
11. 操作者必须及时清理和排除舵机周围的碎片、杂物和液体,保持工作环境整洁。
12. 定期对舵机进行维护保养,包括更换液压油、检查电机和泵的工作状态等,确保舵机的安全性和可靠性。
总结:电动液压舵机的运行安全与操作人员的操作规范密切相关,只有严格遵守操作规程,按照标准操作步骤进行操作,才能确保舵机的安全运行,防止事故的发生。
因此,操作人员必须具备专业知识和技能,并时刻保持高度的警惕性和责任心,以确保操作的准确性和安全性。
Botball示例机器人搭建手册v2.0

准备以下零件
金属舵机摆臂x1 尖头螺丝x1
将舵机臂固定到舵机
准备以下零件
长螺丝x2 9孔乐高梁X1 螺帽x2
将9孔乐高梁固定到底盘
使用乐高零件拼装图示结构
将7孔乐高梁安装到底盘
在另一侧重复
在Wallaby控制器上安装四个乐高销
将两个13孔乐高梁固定到Wallaby控制器
使用粘扣固定锂电池
准备以下零件
L形金属支架x1 螺帽x2 小礼帽(灰度传感器)x1 3孔乐高梁x1 螺丝x2
将传感器固定到L形金属支架上
注意过度紧固螺丝将导致传感器损坏
将装配好的结构安装到底盘上
准备以下零件
舵机支架x1 短螺丝x2 螺帽x2
将舵机支架固定到底盘上
准备以下零件
舵机x1 中螺丝x2 螺帽x2
将舵机固定到支架(在红色箭头处紧固螺丝)
将舵盘固定到轮子上
将轮子固定到电机上 并使用螺钉加固
轮子固定完成
在底板另一侧安装轮子
使用螺丝刀取出牛眼万向轮的钢珠
准备以下零件
长螺钉x2 牛眼万向轮杯罩x1 垫片x1 三孔乐高梁x1
如图所示完成安装
将钢珠装回万向轮杯罩
将牛眼万向轮固定到底盘长端
放置垫片 并使用螺母紧固
牛眼万向轮安装完成
连接Wallaby控制器和底盘
前视图
后视图
整理电机、舵机和传感器的线缆
将电机、舵机和传感器连接到Wallaby控制器
Create 2机器人底盘
注意! 原厂充电 器为110V
请勿使用 原厂充电 器为 Create2 充电
移除Create2顶盖 露出连接孔
移除尘盒
拆除图示位置的螺丝 (螺丝放到一侧备用)
舵机操作规程

舵机操作规程
启动前的准备
1.检查舵机外部,移去周围无关物品;
2.用手转动主、副油泵数转,检查各运动部件有无卡阻现象;
3.检查舵机部件连接和坚固情况是否良好;
4.检查贮油柜和日用循环油箱油质油量,油位应不低于2/3,不足时
及时进行补充;
5.检查确认各阀开关正确;
6.检查系统及油泵、油缸轴封有无漏泄,各压力表是否正常;
7.检查各油脂润滑点,必要时涂加润滑脂。
试舵检查
1.联系驾驶台试舵,接通主电源;
2.起动主油泵,检查各仪表压力是否正常;
3.操舵试验:检查舵角指示器是否正确,极限开关动作是否灵活、
可靠,舵机运转情况是否正常,并排除系统中空气;
4.再次检查油缸、油泵、管系有无漏泄,并予以排除;
5.舵机应满足下列参数:
1)满舵工作角±35°;
2)舵由左35°转至右35°一台油泵转舵速度28秒,两台油泵26
秒;
6.试舵完毕,通知驾驶台试舵完成。
SINOTRANS SHANGHAI轮机部。
全国青少年机器人技术等级考试 直流电机、舵机连接主控板的方式.doc

直流电机与主控板的连接(需要电机驱动模块)舵机与主控板的连接棕色线连接负极,红色线连接正极,黄(橙)色线连接控制引脚。
舵机是什么?伺服电机通常被称为舵机,它是一种带有输出轴的小装置。
当我们向伺服器发送一个控制信号时,输出轴就可以转到特定的位置。
只要控制信号持续不变,伺服机构就会保持轴的角度位置不改变。
如果控制信号发生变化,输出轴的位置也会相应发生变化。
日常生活中,舵机常被用于遥控飞机、遥控汽车、机器人等领域。
舵机的内部结构舵机的工作原理舵机内部的控制电路,电位计(可变电阻器)和电机均被连接到电路板上,如内部结构图的右边部分。
控制电路通过电位计可监控舵机的当前角度。
如果轴的位置与控制信号相符,那么电机就会关闭。
如果控制电路发现这个角度不正确,它就会控制马达转动,直到它达到指定的角度。
舵机角度根据制造商的不同而有所不同。
比如,一个180度的舵机,它可以在0度至180度之间运动。
由于限位装置被安装在主输出装置上,超出这个范围机械结构就不能再转动了。
舵机的输出功率与它所需要转动的距离成正比。
如果输出轴需要转动很长的距离,马达就会全速运转,如果它只需要短距离转动,马达就会以较慢的速度运行,这叫做速度比例控制。
如何让舵机转到制定角度控制线用于传输角度控制信号。
这个角度是由控制信号脉冲的持续时间决定的,这叫做脉冲编码调制(PCM)。
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围,总间隔为2ms。
脉冲的宽度将决定马达转动的距离。
例如:1.5毫秒的脉冲,电机将转向90度的位置(通常称为中立位置,对于180°舵机来说,就是90°位置)。
如果脉冲宽度小于1.5毫秒,那么电机轴向朝向0度方向。
如果脉冲宽度大于1.5毫秒,轴向就朝向180度方向。
Botball Link控制器使用手册

Link 图形函数 ......................................................................................................................... 34 深度传感器函数..................................................................................................................... 35 6.1 关于深度传感器 ............................................................................................................. 35 6.2 深度传感器函数 ............................................................................................................. 36
1
4.2 4.3 4.4 4.5 4.6 4.7 5. 6.
设置 Link 颜色追踪通道 ............................................................................................ 23 设置 Link 二维码扫描通道 ........................................................................................ 25 验证通道是否设置正确............................................................................................. 26 Link 视觉系统的库函数(含常用部分,其它详见附录) ..................................... 27 程序举例:控制舵机实现颜色追踪......................................................................... 28 程序举例:控制电机指示灯亮灭来表示颜色追踪................................................. 30
机械手舵机的用法及程序

舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。
其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
经由电路板上的IC 判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。
适用于那些需要角度不断变化并可以保持的控制系统。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
一般舵机旋转的角度范围是0°到180°度。
舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20ms(50Hz),理论上脉宽分布应在1ms到2ms之间,但是,事实上脉宽可由0.5ms到2.5ms之间,脉宽和舵机的转角0°~180°相对应。
有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
大概了解了舵机以后,我们就试着来控制一个舵机吧,将GND和+5V连接好之后,我选择信号输入口为数字接口7,至于供电部分要注意,舵机转动时电流会比较大,连接好电路就来编写程序吧,我就让舵机转动到我输入数字所对应的角度数,并将角度显示到屏幕上。
程序如下:int servopin=7;//定义舵机接口数字接口7int myangle;//定义角度变量int pulsewidth;//定义脉宽变量int val;void servopulse(int servopin,int myangle)//定义一个脉冲函数{pulsewidth=(myangle*11)+500;//将角度转化为500-2480的脉宽值digitalWrite(servopin,HIGH);//将舵机接口电平至高delayMicroseconds(pulsewidth);//延时脉宽值的微秒数digitalWrite(servopin,LOW);//将舵机接口电平至低delay(20-pulsewidth/1000);}void setup(){pinMode(servopin,OUTPUT);//设定舵机接口为输出接口Serial.begin(9600);//连接到串行端口,波特率为9600Serial.println("servu=o_seral_simple ready" ) ;}void loop()//将0到9的数转化为0到180角度,并让LED闪烁相应数的次数{val=Serial.read();//读取串行端口的值if(val>'0'&&val<='9'){val=val-'0';//将特征量转化为数值变量val=val*(180/9);//将数字转化为角度Serial.print("moving servo to ");Serial.print(val,DEC);Serial.println();for(int i=0;i<=50;i++)//给予舵机足够的时间让它转到指定角度{servopulse(servopin,val);//引用脉冲函数}}}下载完程序就可以输入1到9的数字,让你的舵机转相应的20°到180°了。
JBC Botball小学组例程

JBC 挑战1 碰一下就走//使用motor和msleep语句控制小车直线行驶,碰到易拉罐之后返回启动区。
int main(){motor(0,100);motor(3,100);msleep(5000);// 令0号端口的电机以100%满速前进,程序暂停5秒motor(0,-100);motor(3,-100);msleep(5000); //令3号端口的电机以100%满速后退ao();//关闭所有电机}JBC 挑战2 绕罐返回//绕可乐罐转半圈返回启动区int main(){motor(0,100);motor(3,100);msleep(5000); //0号和3号电机满速前进(直行)motor(0,100);motor(3,0);msleep(1500); //0号电机满速前进,3号电机停止运行(左转弯)motor(0,100);motor(3,100);msleep(1500); //直行motor(0,100);motor(3,0);msleep(1500); //左转弯motor(0,100);motor(3,100);msleep(5000); //返回启动区ao();//关闭所有电机}JBC 挑战3 精确停靠//使用motor语句以及msleep语句,让小车按照预定路线行驶,准确停在黄色、蓝色以及绿色库中。
绿色库:int main(){motor(0,100);motor(3,100);msleep(4000); //直行ao();//结束}蓝色库:int main(){motor(0,100);motor(3,100);msleep(4000); //直行motor(0,50);motor(3,100);msleep(1500); //0号电机以50%的速度前进,3号舵机以100%的速度前进1.5秒(右转弯)motor(0,100);motor(3,100);msleep(3000); //直行ao();}黄色库:int main(){motor(0,100);motor(3,100);msleep(5000); //直行motor(0,100);motor(3,0);msleep(1000); //左转弯motor(0,100);motor(3,100);msleep(1000); //直行motor(0,100);motor(3,0);msleep(1000); //左转弯motor(0,100);motor(3,100);msleep(1500); //直行ao();//结束}JBC 挑战4 蛇形穿罐//准确地使用语句让小车完成任务,使用函数让代码更加清晰易读void drive_turn_left();void drive_turn_right();void drive_forward();int main(){motor(0,100);motor(3,100);msleep(3000);drive_turn_left();drive_forward();drive_turn_right();drive_forward();drive_turn_right();drive_forward();drive_turn_left();drive_forward();drive_turn_left();drive_forward();drive_turn_right();drive_forward();drive_turn)right();drive_forward();drive_turn_right();motor(0,100);motor(3,100);msleep(4500);ao();}void drive_turn_left(){motor(0,100);motor(3,0);msleep(1200);//左转弯}void drive_turn_right(){motor(0,0);motor(3,100);msleep(1200);//右转弯}void drive_forward() {motor(0,100);motor(3,100);msleep(1200);//直走}JBC 挑战5 全力装载//在挑战3的基础之上加上机械臂来收集可乐瓶进入绿色库:int main(){motor(0,100);motor(3,100);msleep(4000);ao();}进入蓝色库:int main(){motor(0,100);motor(3,100);msleep(4000);motor(0,50);motor(3,100);msleep(1500);motor(0,100);motor(3,100);msleep(3000);ao();}进入黄色库:int main(){motor(0,100);motor(3,100);msleep(5000);motor(0,100);motor(3,0);msleep(1000);motor(0,100);motor(3,100);msleep(1000);motor(0,100);motor(3,0);msleep(1000);motor(0,100);motor(3,100);msleep(1500);ao();}JBC 挑战6 疯狂推罐机//机器人在比赛途中可以驶出场地纸,可以设计一个长机械臂,从场地后将罐子推到启动区void drive_left();void drive_right();void drive_forward();int main(){drive_right();drive_forward();msleep(3000);drive_left();drive_forward();msleep(7000);drive_left();drive_forward();msleep(3000);drive_left();drive_forward();msleep(7000);ao();}void drive_left(){motor(0,100);motor(3,0);msleep(1200);}void drive_right(){motor(0,0);motor(3,100);msleep(1200);}void drive_forward(){motor(0,100);motor(3,100);}JBC 挑战7 沿线走//使用传感器控制小车前进int main(){while(1){if(analog10(0)>=512)//在0号端口接入巡线传感器{mav(0,750);mav(3,100);msleep(200);//如果非黑线,左转}else if(analog10(0)<512){mav(0,100);mav(3,750);msleep(200);//如果黑线,右转}}}JBC 挑战8 清扫道路//用触碰传感器和巡线传感器移动,控制舵机抓取一个易拉罐int main(){enable_servo(1);//打开1号舵机enable_servo(3);//打开3号舵机set_servo_position(1, 1000);//控制好机械爪的高度set_servo_position(3,1500);//打开机械爪while(digital(15)!=1)//巡线前进直到15号端口上的触碰传感器被按下 {if(analog10(0)>=512)//如果不是黑线左转{mav(0,750);mav(3,100);msleep(200);}else if(analog10(0)<512)//如果黑线右转{mav(0,100);mav(3,750);msleep(200);}}ao();//当端口15度数为“0”,电机停止运行set_servo_position(3,440);//机械爪抓取物品motor(0,-100);motor(3,-100);//全速后退msleep(4000);disable_servos();ao();}JBC 挑战9 直线行驶//准确调整两个轮子的转速保持机器小车直线前进int main(){motor(0,100);motor(3,100);//全速前进msleep(5000);motor(0,-100);motor(3,-100);//全速后退msleep(5000);ao();}(使用motor控制速度受电量影响,使用mav函数控制电机能够得到更稳定的结果)JBC 挑战10 蛇形//蛇形主要挑战灵活运用舵机的控制,通过控制舵机的转速来完成锐角弯和钝角弯。
舵机操作规程
舵机操作规程1 开航前的检查试舵1.1 开机航备车前,由驾驶室值班人员负责检查操纵台各开关位置是否正确,开启交流和直流舵角指示器,分别启动交流机和直流舵机进行活舵;启动油泵后应在20移钟后才开始操舵(特殊情况除外),应无空舵、滞舵和异常漏油现象,左、右满舵满足要求;同时应观察操舵压力表油压,检查舵角指示器及声光信号应正常,发现异状应通知轮机长及时检查,排除故障,方能开航。
1.2 值班管轮检查舵机日用油柜油位,各转换开关,阀门开闭是否正常,推舵油缸以及各种管系法兰应无漏油,推舵油缸柱塞运转是否平稳,各机械联接部位开口肖、螺栓、螺母等是否正常。
2 运行中的检查2.1 值班舵工操舵时应注意观察操舵压力、舵角指针转动是否平稳,有无空舵、滞舵和其它不正常现象,发现问题应立即通知轮机长或值班管轮及时处理,作好记录,接班时值班舵工应到舵机舱检查舵柱,拉杆等运行情况,向各加油点加油。
2.2 正常情况下,交流舵机每隔一小时应交替使用。
2.3 值班管轮每小时对舵机的运行情况检查一次,检查情况在《舵机运行记录》上做好记录,轮机长每天对舵机全面检查不得少于两次,检查情况在《轮机日志》上作好记录。
2.4 值班管轮检查日用油柜油位,检查油泵、油缸、电动机及各阀件的运转情况有无泄漏,温度是否正常;各机械联接部位、管系夹码螺栓、螺母是否牢固,开口肖是否正常;观察推舵压力的变化情况。
2.5 应急舵操作时按YJ02第六章的规程进行。
3 舵机停止运转3.1 值班舵工关闭油泵转换开关,停止油泵电源、关闭交流、直流舵角指示器和驾驶台报警电源。
3.2 值班管轮检查,确认舵机油泵停止运转,如有故障,立即排除。
4 记录轮、驾检查情况分别记入《舵机检查记录薄》。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1000
电机被分成了1000 个tick
750
250
500
让机器人小车动起来
基础目标: 编程控制机器人以800tick每秒的速度前进 流程图
两秒,然后停下来。
Begin
挑战目标:让机器人小车前进两秒转弯返回。
Drive forward at 800.
伪代码
1.小车前进,速度800tick. 2.保持两秒. 3.停止电机. 4.结束程序.
Botball教师培训
——舵机和电机控制
Botball国际机器人大赛中国组委会
舵机控制
enable_servos 和 disable_servos 函数 set_servo_position 函数
舵机 servo
Large servo
Small servo
连接舵机
• 控制器上有四个舵机端口,左边的0 & 1 ,右边的
3. Set servo position to counter.
// 4.3 Set servo position to counter.
5.Disable servos.
// 5. Disable servos.
6.End the program.
// 6. End the program.
用循环控制舵机缓抬
• 舵机的线有三根:
• (S) 橙色 (信号)
• (+) 红色 (电源)
• (−) 棕色 (地线) wire
(S) signal wire (+) power wire (–) ground wire
2 & 3.
Servo Port #3 Servo Port #2
使用舵机调试面板
控制器
舵机控制函数
mav(0, 800);
// Move motor on port #0 at 800 ticks/sec.
• 驱动机器人时不依赖于电量高低,更精准 • 需要和 msleep 函数准确配合.
最基础的控 制电机函数
控制电机的函数
电机端口 ( 0 - 3)
mav(0, 500); // 控制0号端口的电机以每秒500 ticks的速度正转 // (速度取值-1500 到 +1500)
int main() {
set_servo_position(2, 1500); enable_servos(); msleep(1000); set_servo_position(2, 925); msleep(1000); set_servo_position(2, 675); msleep(1000); disable_servos(); return 0; }
用循环实现舵机缓抬, 避免出现舵机快速转动。
int main() {
int counter = 200;
set_servo_position(0, counter);
enable_servos();
// Is counter < 1800? while (counter < 1800) {
msleep(100);
msleep(1000); // 等待1000毫秒
ao(); // all off,关闭所有电机和舵机
电机转动单位 ticks
• Tick是度量电机转动的单位。Botball使用的电机转一圈大约
是1000ticks。
• 周长 (厘米) = 1 圈 = ~1000 ticks
手表被分成60个 tick
// Add 100 to counter counter = counter + 100;
// Set servo position to counter set_servo_position(0, counter); } msleep(100); // Disable servos. disable_servos();
// 1. Set counter to 200
2.Set servo position to counter. // 2. Set servo position to counter
3.Enable servos.
// 3. Enable servs.4.Loop: Is counter < 1800?
注释
Wait for 2 seconds.
// 1. Drive forward at 800 tps. Stop motors.
// 2. Wait for 2 seconds.
// 3. Stop motors.
Return 0.
// 4. End the program. End
使用mav和ao函数
int main() {
printf("Drive forward!\n"); // State intent mav(0, 800); mav(2, 800); // turn on motor msleep(2000); ao(); // turn off all motors return 0; }
return 0; }
让机器人动起来: 电机控制
将电机连接到Wallaby motor 函数 mav 函数
Wallaby控制器的电机端口
端口号标记
电机端口 0, 1, 2, 3
连接电机
• 电机有两根线,一红一黑接头分成两叉。 • 端口通电时亮绿灯或红灯,代表正转和反转。
• 接线方向决定电机转动方向。 • 绿色代表正转,红色代表反转。
在使用 enable_servos启 用舵机之前不设置目标位 置,舵机会先到1024的位 置,在转动到指定位置。
用循环控制舵机缓抬
基础任务: 编写程序控制舵机臂的位置从200到1800,每次增加100
• 在程序开始之前启用舵机,在程序结束前关闭舵机
伪代码
注释
1.Set counter to 200.
2号电机端口 3号电机端口
电机接头 如图所示
连接电机
示例机器人的左轮连接到0号电机端口,右轮连接到2号电机端口
电机调试
电机控制函数
学生测试时需要注意不要紧 握住电机,防止电机堵转。
motor(0, 100);
// Turns on motor port #0 at 100% power.
• 按恒定功率运作,在用于滑轮时力量更大 • 根据电池电量不同表现也会不一样,用于驱动机器人时误差较大
// 4. Loop: Is counter < 1800?
1. Wait for 100 milliseconds. // 4.1. Wait for 100 milliseconds.
2. Add 100 to counter.
// 4.2. Add 100 to servo position.