用51单片机控制12864显示数字时钟
51单片机和12864液晶显示实例——C语言

#include <reg51.h>#define unchar unsigned char #define unint unsigned intsbit RS=P2^7;sbit RW=P2^6;sbit E=P2^5;void delay(unsigned int t){unsigned int i,j;for(i=0;i<t;i++)for(j=0;j<10;j++);}void busy(){RS=0;RW=1;E=1;P0=0xff;while((P0&0X80)==0x80); }void write_com(unchar com) {busy();RS=0;RW=0;E=1;P0=com;delay(5);E=0;delay(5);}void write_date(unchar date) {busy();RS=1;RW=0;E=1;P0=date;// delay(5);E=0;// delay(5);}void init(){delay(2000);write_com(0x30); //选择基本指令,选择8位数据流delay(5);write_com(0x0c); //开显示(无游标,不反白)delay(10);write_com(0x01); //清除显示,并且设定地址指针为00H delay(500);write_com(0x06);// 设定游标移动方向}void sendaddr(unchar n,unchar m){switch(n){case 1:write_com(0x80+m);break;case 2:write_com(0x90+m);break;case 3:write_com(0x88+m);break;case 4:write_com(0x98+m);break;}}void display(unchar n,unchar m,unchar *s){sendaddr(n,m);while(*s>0){write_date(*s);s++;delay(100);}}void main(){unchar *s;init();s="甲:“我来了”";display(1,0,s);s="乙:“热烈欢迎。
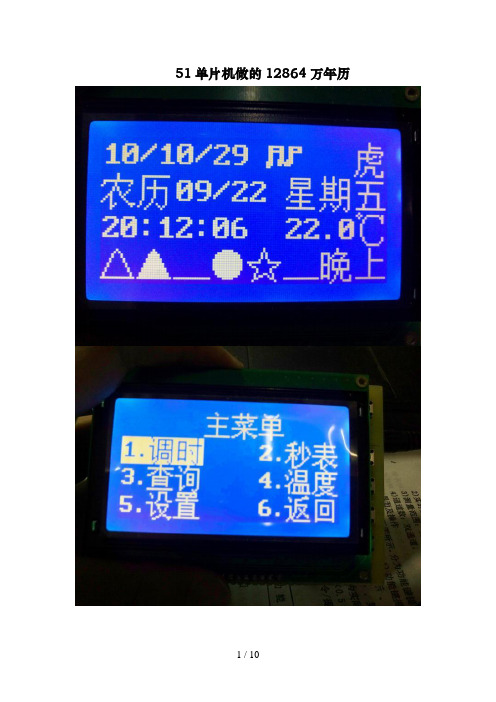
基于51单片机的12864万年历

#include <reg51.h> // 该程序具有显示日期、月份、日期和时间功能#include<stdio.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int#define sint signed int#define disp_off 0x3e //显示关#define disp_on 0x3f //显示开#define disp_x 0xb8 //页地址为0页#define disp_z 0xc0 //行地址为0行#define disp_y 0x40 //列地址为0列#define comm 0 //命令标志位#define dat1 1 //数据标志位#define data_ora P0 //液晶12864的数据端与单片机的P0相连sbit di =P2^0; //Data or Instrument Select,H:写数据,L:写指令sbit rw =P2^1; //Write or Read,H:read,L:writesbit e =P2^4; //读写使能sbit cs1=P2^2; //cs1=H,选择左半屏sbit cs2=P2^3; //cs2=H,选择右半屏sbit clk=P1^0; //8563 clksbit dat=P1^1; //8563 datauchar fen=0x42,miao=0x38,shi=0x17,riqi=0x02,//设置时间用yuefen=0x09,xingqi=0x00,nian=0x07,zhongduan;//设置时间用uchar code tabma[10][16]=//阴码点阵格式、取模方式为列行式、逆向取模(低位在前),//十六进制输出,中文16*16,英文8*16 宋体{//0(0) 1(1) 2(2) 3(3) 4(4) 5(5) 6(6) 7(7) 8(8) 9(9){0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00}, /*"0",0*/{0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00}, /*"1",1*/{0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00}, /*"2",2*/{0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00}, /*"3",3*/{0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00}, /*"4",4*/{0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00}, /*"5",5*/{0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00}, /*"6",6*/{0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00}, /*"7",7*/{0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00}, /*"8",8*/{0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00}, /*"9",9*/ };uchar code tab2ma[7][32]=// 日(0) 一(1) 二(2) 三(3) 四(4) 五(5) 六(6){{0x00,0x00,0x00,0xFE,0x42,0x42,0x42,0x42,0x42,0x42,0x42,0xFE,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x3F,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x3F,0x00,0x00,0x00,0x00}, /*"日",0*/{0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0xC0,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}, /*"一",1*/{0x00,0x00,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x06,0x04,0x00,0x00,0x00,0x00,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x18,0x10,0x00}, /*"二",2*/{0x00,0x04,0x84,0x84,0x84,0x84,0x84,0x84,0x84,0x84,0x84,0x84,0x84,0x04,0x00,0x00,0x00,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x00}, /*"三",3*/{0x00,0xFE,0x02,0x02,0x02,0xFE,0x02,0x02,0xFE,0x02,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,0x7F,0x28,0x24,0x23,0x20,0x20,0x20,0x21,0x22,0x22,0x22,0x22,0x7F,0x00,0x00}, /*"四",4*/{0x00,0x02,0x82,0x82,0x82,0x82,0xFE,0x82,0x82,0x82,0xC2,0x82,0x02,0x00,0x00,0x00,0x20,0x20,0x20,0x20,0x20,0x3F,0x20,0x20,0x20,0x20,0x3F,0x20,0x20,0x30,0x20,0x00}, /*"五",5*/{0x10,0x10,0x10,0x10,0x10,0x91,0x12,0x1E,0x94,0x10,0x10,0x10,0x10,0x10,0x10,0x00,0x00,0x40,0x20,0x10,0x0C,0x03,0x01,0x00,0x00,0x01,0x02,0x0C,0x78,0x30,0x00,0x00}, /*"六",6*/ };uchar code nianma[]=//年(0) 月(1) 日(2) 星(3) 期(4){0x40,0x20,0x10,0x0C,0xE3,0x22,0x22,0x22,0xFE,0x22,0x22,0x22,0x22,0x02,0x00,0x00,0x04,0x04,0x04,0x04,0x07,0x04,0x04,0x04,0xFF,0x04,0x04,0x04,0x04,0x04,0x04,0x00}; /*"年",0*/ uchar code yuema[]={0x00,0x00,0x00,0x00,0x00,0xFF,0x11,0x11,0x11,0x11,0x11,0xFF,0x00,0x00,0x00,0x00,0x00,0x40,0x20,0x10,0x0C,0x03,0x01,0x01,0x01,0x21,0x41,0x3F,0x00,0x00,0x00,0x00}; /*"月",1*/ uchar code rima[]={0x00,0x00,0x00,0xFE,0x42,0x42,0x42,0x42,0x42,0x42,0x42,0xFE,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x3F,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x3F,0x00,0x00,0x00,0x00}; /*"日",2*/ uchar code xingqima[]={0x00,0x00,0x00,0xBE,0x2A,0x2A,0x2A,0xEA,0x2A,0x2A,0x2A,0x2A,0x3E,0x00,0x00,0x00,0x00,0x48,0x46,0x41,0x49,0x49,0x49,0x7F,0x49,0x49,0x49,0x49,0x49,0x41,0x40,0x00, /*"星",3*/0x00,0x04,0xFF,0x54,0x54,0x54,0xFF,0x04,0x00,0xFE,0x22,0x22,0x22,0xFE,0x00,0x00,0x42,0x22,0x1B,0x02,0x02,0x0A,0x33,0x62,0x18,0x07,0x02,0x22,0x42,0x3F,0x00,0x00}; /*"期",4*///时(0) 分(1) 秒(2)uchar code shima[]={0x00,0xFC,0x44,0x44,0x44,0xFC,0x10,0x90,0x10,0x10,0x10,0xFF,0x10,0x10,0x10,0x00,0x00,0x07,0x04,0x04,0x04,0x07,0x00,0x00,0x03,0x40,0x80,0x7F,0x00,0x00,0x00,0x00}; /*"时",0*/uchar code fenma[]={0x80,0x40,0x20,0x98,0x87,0x82,0x80,0x80,0x83,0x84,0x98,0x30,0x60,0xC0,0x40,0x00,0x00,0x80,0x40,0x20,0x10,0x0F,0x00,0x00,0x20,0x40,0x3F,0x00,0x00,0x00,0x00,0x00}; /*"分",1*/uchar code miaoma[]={0x12,0x12,0xD2,0xFE,0x91,0x11,0xC0,0x38,0x10,0x00,0xFF,0x00,0x08,0x10,0x60,0x00,0x04,0x03,0x00,0xFF,0x00,0x83,0x80,0x40,0x40,0x20,0x23,0x10,0x08,0x04,0x03,0x00}; /*"秒",2*/void delay(sint n); //延时程序void xie_start(); //开始条件void xie_stop(); //停止条件bit xie1(uchar shu); //向8563中写入1个字uchar du1(); //从8563中读出1个字uchar du(); //从8563中读出时间和日期uchar xie(); //向8563中设置时间和日期//uchar xie_dingshi(); //8563定时器设置//uchar xie_fangbo_dingshi(); //8563的方波设置void delay1 (uint ms); //延时void wr_lcd (uchar dat_comm,uchar content); //向12864中写命令//uchar rd_lcd (); //读12864数据void chk_busy (); //忙闲检测void lat_disp (uchar data1,uchar data2); //写点钟//void img_disp (uchar code *img) ; //显示图像void chn_disp (uchar x,uchar y,uchar xl,uchar yl,uchar row_xl,uchar row_yl,uchar code *chn);//显示汉字void init_lcd (); //12864初始化void disp(); //128显示程序//-------------主函数--------------------void main(){uchar ml=0;init_lcd (); //LCD初始化lat_disp(0x00,0x00);xie(); //预设时间用,设置好时间后可以屏蔽for(;;){du(); //读8563的时间lat_disp(0x00,0x00);disp(); //显示时间delay1(100);}}//-------------------延时---------------------------//void delay(sint n){for(n;n>0;n--);}/////////////////////以下是PCF8563读写/////////////////////以下是PCF8563读写/* I2C的起始条件,在时钟端SCK为高电平时,数据端SDA发生由高到低的变化,为起始条件,启动I2C总线。
51单片机驱动显示屏12864

/*-- 文字: 机 --*/
/*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/
0x10,0x10,0xD0,0xFF,0x90,0x10,0x00,0xFE,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,0x00,
0x04,0x03,0x00,0xFF,0x00,0x11,0x08,0x04,0x03,0x00,0xFF,0x00,0x03,0x04,0x08,0x00,
/*-- 文字: 辉 --*/
/*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/
0x44,0x58,0xC0,0x7F,0xD0,0x48,0x26,0x22,0xE2,0x3A,0xA2,0x22,0x22,0x2A,0x06,0x00,
/*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,
/*-- 文字: --*/
/*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/
uchar code hz[]={
/*-- 文字: 邓 --*/
/*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/
0x00,0x12,0x22,0x42,0x82,0x62,0x1E,0x00,0x00,0xFE,0x02,0x22,0xDA,0x06,0x00,0x00,
#51单片机12864万年历C语言
51单片机做的12864万年历Main.c#include "reg52.h"#include "macroconst.h"#include "keyscan.h"#include "screen.h"#include "18b20.h"#include "ds1302.h"#include "atao_12864.h"#include "24c02.h"idata unsigned char state1[1]。
unsigned char screennum=1。
//屏幕号#define time_task_sec 200 //节拍200Hz#define clock 24000000 //晶振#define max_task 4 //最大任务数idata unsigned char task_delay[4]。
#define task_delay0 time_task_sec/1 //2赫兹18b20 #define task_delay1 time_task_sec/5 //10赫兹屏幕#define task_delay2 time_task_sec/3 //4赫兹1302 #define task_delay3 time_task_sec/20 //20赫兹键盘void init(>{unsigned char i。
init18b20(>。
ds1302_init(>。
initina1(>。
//---------------------------LCD字库初始化程序 RdFromROM(state1,8,1>。
state[0]=state1[0]。
//-------界面RdFromROM(state1,15,1>。
51单片机串行12864显示.c

{
CH = 0;
delay(1);
lcdinit();
delay(10);
while(1)
{
Test();
delay(5000);
}
}
* 名称 : write_com()
* 功能 : 写串口指令
* 输入 : cmdcode
* 输出 : 无
***********************************************************************/
void write_com(unsigned char cmdcode)
* 输入 : t
* 输出 : 无
***********************************************************************/
void delay(unsigned int t)
{
unsigned int i,j;
for(i=0; i<t; i++)
* 名称 : hzkdis()
* 功能 : 显示字符串
* 输入 : *s
* 输出 : 无
***********************************************************************/
void hzkdis(unsigned char code *s)
* 名称 : lcdinit()
* 功能 : 初始化函数
* 输入 : cmdcode
* 输出 : 无
***********************************************************************/
基于51单片机的12864液晶时钟完整程序(已通过)

{
uchar flag ;
flag=uc_R1302(0x81); // 在秒寄存器读数 ,ch=
if (flag&0x80) //
{
v_W1302(0x8e,0x00); //
v_W1302(0x80,0x45); //0秒
v_W1302(0x82,0x29); //35分钟
T_RST = 1;
v_WTInputByte(ucAddr); /* 地址,命令 */
ucDa = uc_RTOutputByte(); /* 读1Byte数据 */
T_CLK = 1;
T_RST =0;
return(ucDa);
}
/********************************************************/
void days()
{
if ( yue== 0x01 && ri== 0x01 ){ lcd_write_string(4,3,"元旦节"); }
if ( yue== 0x02 && ri== 0x14 ){ lcd_write_string(4,3,"情人节"); }
if ( yue== 0x03 && ri== 0x08 ){ lcd_write_string(4,3,"妇女节"); }
}
void WRI(char instru) //液晶写指令
{
lcd_check_busy();
RS = 0 ; //显示指令
RW = 0 ; //写
51单片机,定时器,12864液晶显示,独立键盘key1,key2,key3,控制调节时间。求大侠给个C程序

定时器:#include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义sbit LED=P1^2; //定义LED端口/*------------------------------------------------定时器初始化子程序------------------------------------------------*/void Init_Timer0(void){TMOD |= 0x01; //使用模式1,16位定时器,使用"|"符号可以在使用多个定时器时不受影响TH0=0x00; //给定初值,这里使用定时器最大值从0开始计数一直到65535溢出TL0=0x00;EA=1; //总中断打开ET0=1; //定时器中断打开TR0=1; //定时器开关打开}/*------------------------------------------------主程序------------------------------------------------*/main(){Init_Timer0();while(1);}/*------------------------------------------------定时器中断子程序------------------------------------------------*/void Timer0_isr(void) interrupt 1 using 1{TH0=0x00; //重新赋值TL0=0x00;LED=~LED; //指示灯反相,可以看到闪烁}独立键盘:#include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义sbit key1=P3^0; //定义按键位置sbit key2=P3^1;sbit key3=P3^2;sbit key4=P3^3;/*------------------------------------------------延时子程序------------------------------------------------*/void delay(unsigned int cnt){while(--cnt);}/*------------------------------------------------主函数------------------------------------------------*/main(){P2=0x00;while(1){if(!key1){ //按下相应的按键,数码管显示相应的码值delay(1000);if(!key1){P0=0x06;//数码管显示"1"}}if(!key2){ //按下相应的按键,数码管显示相应的码值delay(1000);//去抖动if(!key2) //检测按键确实按下,进行按键处理{P0=0x5B;//数码管显示"2"//这里可以添加按键按下所需要的操作,如数据加减乘除,蜂鸣器等设备开关}}if(!key3){ //按下相应的按键,数码管显示相应的码值delay(1000);if(!key3){P0=0x4F;//数码管显示"3"}}if(!key4){ //按下相应的按键,数码管显示相应的码值delay(1000);if(!key4){P0=0x66;//数码管显示"4"}}}}。
用51单片机在12864液晶上实现 电子钟.

#include<reg52.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned intchar second=0;char minite=0;char hour=0;int n=0;bit s2=0;bit s3=0;bit s4=0;bit s5=0;//bit s6=0;/*共阳数码管字型码*//*0,1,2,3,4,5,6,7,8,9,p.,灭*/char code dis_code[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x0c,0xff,0xbf}; /*P点显示代码序号*/char data find_code[]={0,0,12,0,0,12,0,0};/********************************************************///函数名:void Delay1ms(uint count)//功能:延时时间为1ms//输入参数:count,1ms计数//说明:总共延时时间为1ms乘以count,crystal=12Mhz/********************************************************//* 延迟函数*/void Delay1ms(uint count){uint j;while(count--!=0){for(j=0;j<80;j++);}}/************************************************************************//*显示函数*//************************************************************************/ void disp(){char i,j=0xfe;char k;for(i=0;i<8;i++){P2=j;k=find_code[i];P0=dis_code[k];Delay1ms(1);j=_crol_(j,1);}P0=0xff;}/************************************************************************* 函数原型:keychuli();* 功能:处理与键盘相连的P1口的内容,作为键值。
51单片机带字库液晶12864ds1302数字时钟c源程序(无按键修改功能)
51单片机+带字库液晶12864+DS1302数字时钟C 源程序(无按键修改功 能)过两天的搜索与调试,在别人程序的基础上,不断修改,终于调试成功了 这个程序。
目前还不能修改时间与日期,只是以预定时间以始。
适用于开发板:51单片机(AT89S52 +带字库液晶12864(ST7920)+DS1302实时时钟)实现功能:简单,数字时钟 +日期(以后会不断完美)。
C 语言源程序如下:#include <reg52.h>#include <intrins.h> #define uchar unsigned char #define uint unsigned int /*DS1302 端 口设置 */sbit SCK=P3A 6;sbit SDA=P3A4;sbit RST = P3A5;bitReadRTC_Flag;/* 12864 端口定义 */ #define LCD_data P0 sbit LCD_RS = P2A4;sbit LCD_RW = P2A5; sbit LCD_EN = P2A 6;//液晶使能控制sbit PSB 二卩2八1; //并口控制 //DS1302 时钟 //DS1302 IO // DS1302 复位 //读DS1302全局变量//带字库液晶 12864数据口// 寄存器选择输入// 液晶读/写控制sbit RES=P2A3;uchar code dis1[] = {"电子设计天地"};// 液晶显示的汉字uchar code dis2[] = {"有志者,事竟成!"};uchar code dis4[] = {'0','1','2','3','4','5','6','7','8','9'};unsigned char temp;#define delayNOP(); {_nop_();_nop_();_nop_();_nop_();};void lcd_pos(uchar X,uchar Y); //确定显示位置unsigned char l_tmpdate[7]={0,7,16,19,10,1,9};〃秒分时日月周年09-10-19 16:07:00code unsigned charwrite_rtc_address[7]={0x80,0x82,0x84,0x86,0x88,0x8a,0x8c}; //秒分时日月周年最低位读写位code unsigned charread_rtc_address[7]={0x81,0x83,0x85,0x87,0x89,0x8b,0x8d};void Write_Ds1302_byte(unsigned char temp);void Write_Ds1302( unsigned char address,unsigned char dat );unsigned char Read_Ds1302 ( unsigned char address );void Read_RTC(void);//read RTCvoid Set_RTC(void); //set RTCvoid InitTIMER0(void);//inital timer0/*******************************************************************//**//* 延时函数 *//* *//******************************************************************* /void delay(unsigned int m) // 延时程序 {unsigned int i,j;for(i=0;i<m;i++)**************************************************//*检查LCD 忙状态*//*lcd_busy 为1时,忙,等待。
51单片机控制DS1302在液晶12864上的时间显示

} return DAT; }
/******************************************************************* 函数名称: UCHAR 1302_read( UCHAR add )
函数功能: 读出指定位置的数据 输入参数: add,地址; 输出函数: Temp
********************************************************************/
UCHAR DS1302_read( UCHAR add )
{
UCHAR Temp;
ce=0;
sclk=0;
ce=1; DS1302write_byte( add );
/******************************************************************* 函数名称:1302write_byte( UCHAR dat)
函数功能: 写入一个字节( 在 sclk 的上升沿写入,最低位先写入 ) 输入参数: dat 要写入的字节 输出函数: 无
********************************************************************/
UCHAR DS1302read_byte( ) { int i; UCHAR DAT;
sclk=0; for(i=0;i<8;i++)
{ DAT=DAT>>1; if(io==1) DAT|=0x80; sclk=1;
********************************************************************/ห้องสมุดไป่ตู้
51单片机实现定时器2、12864液晶显示、显示图片、滚动字符、DS18B20、转速、超声波测距、速

//*******************资源配置***********************////******计数器0用于超声波记录接收端高电平时长*******////******计数器1用于记录1s内外部脉冲数目即转速*******////********定时器2用于精确定时,定时时间50ms*********////*****************P3^5用于脉冲计数*****************//#include <reg52.H>#include <intrins.h>//*************特殊引脚定义*****************//sbit RX = P1^0; //超声波接收端sbit TX = P1^1; //超声波触发端sbit RS = P2^6;//LCD数据/命令控制端sbit RW = P2^5;//读写控制端sbit EN = P2^7; //使能端sbit RES= P2^4; //复位端sbit PSB= P2^3; //并口/串口选择端sbit DQ = P3^7; //DS18B20数据端sbit BEEP=P1^5; //蜂鸣器#define DataPort P0 //MCU P0<------> LCM#define uchar unsigned char#define uint unsigned int//***********Function Definition*********************////****************函数声明***************************//void LCD_Write_number(uchar s);void Write_char(bit start, uchar ddata); //写入某坐标void Send_byte(uchar bbyte);void Lcd_init(void);//lcd初始化void Disp_img(uchar *img);//显示图片void LCD_Write_string(uchar X,uchar Y,uchar*s); //写入某字符串void LCD_set_xy( uchar x,uchar y );void Lcd_Mark3(void); //画面3void Lcd_Mark2(void); //画面2bit temp_flag; //判断DS18B20正常工作位DS18B20_init();//DS18B20初始化void delay(uint num);//DS18B20延时函数void Delaynms(uint di);//短延时void delayms(uint x);//1ms延时函数readonebyte(void);//读一个字节函数void writeonebyte(uchar dat); //写一个字节函数void gettemperture(void);//获取温度值void temperture_display(); //温度显示函数void tempconv(); //温度转换void beep(); //蜂鸣器响一声函数void timer_init(); //中断初始化函数(计数器0,计数器1,定时器2)void zhuansu_display(); //转速显示函数void speed_conv(); //速度转换函数void speed_display(); //速度显示函数void chaoshengbo_conv(void); //超声波转换//***************变量定义*****************//uchar data temp_dat[2]={0}; //temp[0],temp[1]用来存放温度的低、高8位uchar data DQdisp_buf[5]={0}; //温度显示缓冲区uchar zhuansu_buff[6]={0}; //转速显示缓存uchar speed_buff[6]={0};//速度显示缓存uchar temp_comp; //存放温度整数部分uchar DS18B20_OK,speed2;//DS18B20_OK=0复位正常uchar t2=0,T,L,H,WENDU; //t2代表timer2中断次数,T代表温度整数部分//H:温度高8位,L:温度低8位uint time=0; //超声波往返时间long S=0,num1=0,speed; //s表示超声波距离,num1表示发动机转速// speed表示车轮转速=》速度bit flag =0; //超声波中断溢出标志位uchar disbuff[4]={0}; //超声波数据显示缓存uchar code num[]={"09 :.-℃"};uchar code line1_data[]={"速度:km/h"};uchar code line2_data[]={"转速:r/min"};uchar code line3_data[]={"前方车距:m"};uchar code line4_data[]={"车内温度: "};uchar code line5_data[]={" #**欢迎使用**# "};uchar code line6_data[]={" 您的安全"};uchar code line7_data[]={" 是全家人"};uchar code line8_data[]={" 最大的幸福···"};uchar code picture[]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x14,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x06,0x30,0x01,0xE0,0x00,0x00,0x2A,0x00,0x00,0xD8,0x00,0x00,0x00,0x00,0x 00,0x00,0x0F,0x7B,0x63,0xE0,0x00,0x00,0x22,0x00,0x01,0x24,0x00,0x00,0x00,0x00,0x0 0,0x00,0x0F,0xFB,0x63,0x07,0x34,0x00,0x14,0x00,0x01,0x04,0x00,0x00,0x00,0x00,0x0 0,0x00,0x0D,0xDB,0x63,0x01,0xBC,0x00,0x08,0x00,0x00,0x88,0x00,0x00,0x00,0x00,0x0x00,0x0C,0x1B,0x63,0x07,0xB0,0x00,0x00,0x00,0x00,0x50,0x00,0x00,0x00,0x00,0x0 0,0x00,0x0C,0x1B,0x63,0xED,0xB0,0xDB,0x00,0x01,0x00,0x20,0x00,0x00,0x00,0x00,0x 00,0x00,0x0C,0x19,0xE1,0xE7,0xB0,0xDB,0x00,0x02,0x00,0x00,0x00,0x00,0x00,0x00,0x 00,0x00,0x0C,0x19,0xE1,0xE7,0xB0,0xDB,0x00,0x02,0x00,0x00,0x00,0x00,0x00,0x00,0x 00,0x00,0x00,0x00,0x60,0x00,0x00,0x00,0x00,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x03,0xC0,0x00,0x00,0x00,0x00,0x08,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x08,0x05,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x10,0x0A,0x80,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x0A,0x00,0x00,0xFF,0xF8,0xE0,0x05,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x06,0xC0,0x15,0x00,0x1F,0xFF,0xFF,0xC0,0x02,0x00,0x00,0x00,0x00,0x00,0x00 ,0x00,0x09,0x20,0x11,0x00,0xFB,0xFF,0xE1,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x08,0x20,0x0A,0x03,0x9F,0x00,0x9E,0x3E,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x04,0x40,0x04,0x0E,0x70,0x00,0x81,0xC7,0x80,0x01,0x40,0x00,0x00,0x00,0x0 0,0x00,0x02,0x80,0x00,0x1D,0x80,0x00,0xE0,0x61,0xE0,0x02,0xA0,0x00,0x00,0x00,0x 00,0x00,0x01,0x00,0x00,0x77,0x9F,0xFC,0xF0,0x18,0xF8,0x02,0x20,0x00,0x00,0x00,0x00x00,0x00,0x00,0x01,0xDF,0x00,0x00,0xF3,0x0C,0x3C,0x01,0x40,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x03,0x9E,0x00,0x00,0xF8,0x06,0x1E,0x00,0x80,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x07,0x0E,0x30,0x01,0xFC,0x7F,0x07,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x07,0x0E,0x30,0x01,0xFC,0x7F,0x07,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x7E,0xFF,0xFF,0xFF,0xFF,0xFF,0x83,0xC0,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x0F,0xFD,0xFF,0xFF,0xFF,0xFF,0xFC,0x01,0xF0,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x3F,0x81,0xFF,0x00,0x00,0x00,0x00,0x1F,0xF0,0x00,0x00,0x00,0x00,0x00 ,0x00,0x00,0xFE,0xF0,0x00,0x00,0x01,0x00,0x00,0xC0,0x1C,0x00,0x00,0x00,0x00,0x0 0,0x00,0x03,0xC0,0x07,0x80,0x00,0x03,0xE0,0x07,0x00,0x1C,0x00,0x00,0x00,0x00,0x0 0,0x00,0x03,0x80,0x03,0x40,0x00,0x03,0xE0,0x0C,0x00,0x0E,0x00,0x00,0x00,0x00,0x0 0,0x00,0x07,0x00,0x00,0xC0,0x00,0x00,0x20,0x18,0x00,0x07,0x00,0x00,0x00,0x00,0x0 0,0x00,0x09,0x01,0x80,0x60,0x00,0x00,0x20,0x73,0x9F,0x03,0x80,0x00,0x00,0x00,0x0 0,0x00,0x1E,0x0F,0xF2,0x20,0x00,0x00,0x20,0x67,0xFF,0xC1,0xC0,0x00,0x00,0x00,0x0 0,0x00,0x1E,0x1F,0xF9,0x30,0x00,0x00,0x20,0xEF,0xFF,0xE0,0xE0,0x00,0x00,0x00,0x00 ,0x00,0x38,0x3F,0xFC,0x90,0x00,0x00,0x20,0xCB,0xFF,0xF9,0xF0,0x00,0x00,0x00,0x00 ,0x00,0x7F,0x7F,0xFE,0x10,0x00,0x00,0x20,0xDB,0xFF,0xFF,0xF0,0x00,0x00,0x00,0x00, 0x00,0x6E,0xF9,0xBF,0x10,0x00,0x00,0x20,0xF7,0xED,0xFF,0xF0,0x00,0x00,0x00,0x00 ,0x00,0x7C,0xFC,0x3F,0x10,0x00,0x00,0x20,0x67,0xE1,0xFD,0xE0,0x00,0x00,0x00,0x0 0,0x00,0x7C,0xFC,0x3F,0x10,0x00,0x00,0x20,0x67,0xE1,0xFD,0xE0,0x00,0x00,0x00,0x0 0,0x00,0x38,0xFC,0x3F,0x18,0x00,0x00,0x20,0x87,0xE0,0xFD,0xC0,0x00,0x00,0x00,0x0 0,0x00,0x38,0xF1,0x8F,0x18,0x00,0x1F,0xE7,0x87,0x9C,0x7D,0xC0,0x00,0x00,0x00,0x0 0,0x00,0x1C,0xFE,0x1F,0x81,0xFF,0xFF,0xC0,0x0F,0xE0,0xFF,0x80,0x00,0x00,0x00,0x00, 0x00,0x0C,0xFC,0x3F,0x80,0x00,0x00,0x00,0x0F,0xE1,0xF8,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0xF9,0xBF,0xFF,0xFF,0xFF,0xFF,0xFF,0xEC,0xFE,0x00,0x00,0x00,0x00,0x00, 0x00,0x03,0xF9,0xBF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xC0,0x00,0x00,0x00,0x00, 0x00,0x0F,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00};//************************************************////********** DS18B20 ********////************************************************////************************************************////************蜂鸣器响一声函数*******//void beep(){BEEP=0; //开蜂鸣器delayms(500); //延时半秒BEEP=1; //关蜂鸣器delayms(500); //延时半秒}//************温度转换***************//void tempconv(){uchar sign=0; //定义符号标志位uchar temp; //定义温度数据暂存if(H>127) //大于127,即高4位全为1,即温度为负值{L=(~L)+1; //取反加1,将补码变成原码if((~L)>=0xff) //H=(~L)+1; //取反加一else H=~H; //否则只取反sign=1; //置符号标志位为1}temp=L&0x0f; //取小数位DQdisp_buf[0]=temp*0.625; //所获得的是四位数,所测温度加大了10倍DQdisp_buf[0]=DQdisp_buf[0]%1000%100%10;//将小数部分转换成ASCII码temp_comp=((L&0xf0)>>4|(H&0x0f)<<4); //取温度整数部分DQdisp_buf[3]=temp_comp/100; //温度百位temp=temp_comp%100; //温度的十位和个位一起DQdisp_buf[2]=temp/10; //温度十位DQdisp_buf[1]=temp%10; //温度个位if(DQdisp_buf[3]==0) //如果温度的百位为0{DQdisp_buf[3]=17; //则不显示,if(DQdisp_buf[2]==0) //在这种前提下,如果十位也为0的话,DQdisp_buf[2]=17; //不显示十位}if(sign)DQdisp_buf[3]=13; //如果符号标志位为1,则显示负号}//************温度显示函数**************//void temperture_display(){LCD_set_xy(4,4); //从第四行第5列开始显示LCD_Write_number(11);LCD_Write_number(DQdisp_buf[3]); //显示百位LCD_Write_number(DQdisp_buf[2]); //显示十位LCD_Write_number(DQdisp_buf[1]); //显示个位LCD_Write_number(12); //小数点LCD_Write_number(DQdisp_buf[0]); //十分位LCD_set_xy(4,7);Write_char(1,num[14]);Write_char(1,num[15]);}//************获取温度值*****************//void gettemperture(void){uchar i;DS18B20_init(); //DS18B20初始化if(DS18B20_OK==0) //如果正常{writeonebyte(0xcc); //跳过读序列号的操作writeonebyte(0x44); //启动温度转换for(i;i<100;i++) //调用显示函数延时,等待A/D转换完成,分辨率为12位的需要延时750ms以上temperture_display();DS18B20_init(); //DS18B20初始化writeonebyte(0xcc); //跳过读序列号的操作writeonebyte(0xbe); //读取温度寄存器temp_dat[0]=readonebyte(); //温度低8位放入temp_dat[0]temp_dat[1]=readonebyte(); //温度高8位放入temp_dat[1]L=temp_dat[0]; //温度低8位H=temp_dat[1]; //温度高8位temp_flag=1; //接收正常}else temp_flag=0; //否则接收不正常}//************写一个字节函数*****************//void writeonebyte(uchar dat){uchar i=0;for(i=8;i>0;i--){DQ=0;DQ=dat&0x01;delay(5);DQ=1;dat>>=1;}}//************读一个字节函数***************//readonebyte(void){uchar i=0;uchar dat=0;for(i=8;i>0;i--){DQ=0;dat>>=1;DQ=1;if(DQ)dat|=0x80;delay(4);}return (dat);}//***************DS18B20延时函数************//void delay(uint num){while(--num);}//***************DS18B20初始化*******************//DS18B20_init(void){DQ=1; //DQ复位delay(8); //延时DQ=0; //单片机将DQ拉低delay(90); //等待至少480us的时间DQ=1; //拉高总线delay(8); //等待DS18B20反馈存在低脉冲,单片机检测DS18B20_OK=DQ; //如果为0,则初始化成功,为1,初始化失败delay(100);DQ=1;return (DS18B20_OK); //返回信号,若DS18B20_OK为0,则存在,若DS18B20_OK=1;则不存在}//************************************************////********** LCD 12864 ********////************************************************////************************************************/void Lcd_init(void) //初始化LCD{delayms(40); //大于40MS的延时程序PSB=1; //设置为8BIT并口工作模式delayms(1); //延时RES=0; //复位delayms(1); //延时RES=1; //复位置高delayms(1);Write_char(0,0x30); //选择基本指令集delayms(1); //延时大于100usWrite_char(0,0x30); //选择8bit数据流delayms(1); //延时大于37usWrite_char(0,0x0c); //开显示(无游标、不反白)delayms(1); //延时大于100usWrite_char(0,0x01); //清除显示,并且设定地址指针为00Hdelayms(1); //延时大于10msWrite_char(0,0x06); //指定在资料的读取及写入时,设定游标的移动方向及指定显示的移位,光标从右向左加1位移动delayms(1); //延时大于100us}/******************************************************************** **********//*------------------------------------------------检测忙位------------------------------------------------*/void Check_Busy(){RS=0;RW=1;EN=1;DataPort=0xff;while((DataPort&0x80)==0x80);//忙则等待EN=0;}void Write_char(bit start, uchar ddata) //start=0写指令,start=1写数据{if(start==0) //如果start==0,检查忙碌位后写指令{ Check_Busy(); //忙碌则等待RS=0;RW=0;EN=0;DataPort=ddata; //发送指令_nop_();_nop_();EN=1;_nop_();_nop_();_nop_();_nop_();EN=0;}else //如果start==1,即可以开始{ Check_Busy(); //再次检查,进行些数据操作RS=1;RW=0;EN=1;DataPort=ddata;EN=0;}}/******************************************************************** **********/void Delaynms(uint di) //延时0.1ms左右{uint da,db;for(da=0;da<di;da++)for(db=0;db<10;db++);}/******************************************************************** **********/void Disp_img(uchar *img) //图形方式12864显示字模221 横向取膜{uchar i,j;uint k = 0;Write_char(0,0x34); //图形方式,关闭for(i=0;i<32;i++) //每行128位。
51单片机设置的电子闹钟(可调时间和闹钟)

#include<reg52.h>#define uint unsigned int#define uchar unsigned char#define LED P0 // 数码管的段选#define LIGHT P1 // 时分秒位的指示灯#define WS P2 // 数码管的位选sbit key1=P3^0; // 时间暂停/开始sbit key2=P3^1; // 时间/闹钟设置sbit key3=P3^2; // 增加sbit key4=P3^3; // 减少sbit alarm=P3^6; // 闹铃uchar tab[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; // 0-9uchar tab_dp[10]={0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef}; // 0.-9.(带小数点)uchar data1[]={0,0,0,0,0,0};uchar data2[]={0,0,0,0,0,0};uint t,k,kk,k1,flag;uint bbh,bbm,bbs,bbh1,bbm1,bbs1;uint sec,min,hour,sec1,min1,hour1; // 定义秒,分,时void init();void display();void display_bb();void delay( uint );void keyscan();void main(){init();while(1){keyscan();if(k1==0||k1==1||k1==2||k1==3) // 显示调节时间{display();}if(k1==4||k1==5||k1==6) // 显示调节闹钟{display_bb();}if((bbh==hour)&&(bbm==min)&&data1[4]==0&&data1[5]==5) // 5s报时{alarm=~alarm;delay(1);}if((bbs==sec)&&(bbm==min)&&(bbh==hour)) // 可调报时{alarm=~alarm;delay(1);}}}void init(){WS=LIGHT=flag=0;sec=min=hour=0; // 将0赋给时分秒TMOD=0x01; // 方式1 P129(见课本)TH0=0x3c; // 65536-50000=15536=0x3cb0(50ms) P128(见课本)TL0=0xb0;EA=1; // 开总中断P161(见课本)TR0=1; // 定时/计数器0开启ET0=1; // 定时器/计数器0溢出中断启动P161(见课本)}void delay( unsigned int t) // 延时函数{unsigned int i;while(t--)for(i=0;i<125;i++);}void display() // 显示时间函数{if(TF0==1) // 定时器/计数器溢出P130(见课本){TF0=0; // 清中断标志位t++;if(t==20) // (50ms*20=1s){t=0;sec++; // 秒加1if(sec==60) // 秒为60,则清零,分加1{sec=0;min++;}if(min==60) // 分为60,则清零,时加1{min=0;hour++;}if(hour==24)// 时为24,则清零{hour=0;}}}data1[5]=sec%10;data1[4]=sec/10;data1[3]=min%10;data1[2]=min/10;data1[1]=hour%10;data1[0]=hour/10;WS=0xdf; // 1101 1111 ,低电平显示LED=tab[data1[5]];delay(1);WS=0xef; // 1110 1111LED=tab[data1[4]];delay(1);WS=0xf7; // 1111 0111LED=tab_dp[data1[3]];delay(1);WS=0xfb; // 1111 1011LED=tab[data1[2]];delay(1);WS=0xfd; // 1111 1101LED=tab_dp[data1[1]];delay(1);WS=0xfe; // 1111 1110LED=tab[data1[0]];delay(1);}void display_bb() // 显示闹钟函数{data2[5]=bbs%10;data2[4]=bbs/10;data2[3]=bbm%10;data2[2]=bbm/10;data2[1]=bbh%10;data2[0]=bbh/10;WS=0xdf; // 1101 1111 ,低电平显示LED=tab[data2[5]];delay(1);WS=0xef; // 1110 1111LED=tab[data2[4]];delay(1);WS=0xf7; // 1111 0111LED=tab_dp[data2[3]];delay(1);WS=0xfb; // 1111 1011LED=tab[data2[2]];delay(1);WS=0xfd; // 1111 1101LED=tab_dp[data2[1]];delay(1);WS=0xfe; // 1111 1110LED=tab[data2[0]];delay(1);}void keyscan() // 键盘扫描{if(key1==0) // 暂停/开始{++kk;while(!key1){display();if(kk==1){TR0=0;if(k1==0||k1==1||k1==2||k1==3) // 显示调节时间{display();}if(k1==4||k1==5||k1==6) // 显示调节闹钟{display_bb();}if(key2==0) // 模式选择(调节时间/闹钟){k1++;while(!key2){if(k1==1) // 第1次按下{sec1=sec; // 保存秒的数值sec=88; // 显示88,表示可以调节秒的数值了display(); // 显示88sec=sec1; // 恢复前一刻秒的数值}if(k1==2){min1=min;min=88;display();delay(1);min=min1;}if(k1==3){hour1=hour;hour=88;delay(1);hour=hour1;}if(k1==4){sec1=bbs; // 保存秒的数值bbs=66; // 显示66,表示可以调节秒的数值了display_bb(); // 显示66bbs=sec1; // 恢复前一刻秒的数值}if(k1==5){min1=bbm;bbm=66;display_bb();delay(10);bbm=min1;}if(k1==6){hour1=bbh;bbh=66;display_bb();delay(10);bbh=hour1;}if(k1==7){k1=0;display();}}}if(key3==0) // 时间/闹钟增加设置{while(!key3){if(k1==1){sec++;// 秒加1if(sec==60)sec=0;display();}if(k1==2){min++;delay(60);if(min==60)min=0;display();}if(k1==3){hour++;delay(60);if(hour==24)hour=0;display();}if(k1==4){bbs++; // 秒加1delay(60);if(bbs==60)bbs=0;display_bb();}if(k1==5){bbm++;delay(60);if(bbm==60)bbm=0;display_bb();}if(k1==6){bbh++;delay(60);if(bbh==24)bbh=0;display_bb();if(k1==7){k1=0;display();}}}if(key4==0) // 时间/闹钟减少设置{while(!key4){if(k1==1){sec--; // 秒加1delay(60);if(sec==0)sec=60;display();}if(k1==2){min--;delay(60);if(min==0)min=60;display();}if(k1==3){hour--;delay(60);if(hour==0)hour=24;display();}if(k1==4){bbs--; // 秒减1delay(60);if(bbs==0)bbs=60;display_bb();if(k1==5){bbm--;delay(60);if(bbm==0)bbm=60;display_bb();}if(k1==6){bbh--;delay(60);if(bbh==0)bbh=24;display_bb();}if(k1==7){k1=0;display();}}}}}if(kk==2){kk=0;k1=0;TR0=1;}}}。
用51单片机控制12864显示数字时钟

用51单片机控制12864显示数字时钟用51单片机控制12864显示数字时钟里面有128564显示汉字的程序,自己研究下,不过是用msp430控制的,你改改端口i就可以了。
#include "msp430x26x.h"#define uchar unsigned char#define uint unsigned int#define iDat 1 //数据标志#define iCmd 0 //指令标志#define LCDb_RS 0x20 //定义四个控制引脚#define LCDb_RW 0x40#define LCDb_E 0x80#define LCDb_RST 0x04#define LCDb_L1 0x80 //第一行的地址#define LCDb_L2 0x90 //第二行的地址#define LCDb_L3 0x88 //第三行的地址#define LCDb_L4 0x98 //第四行的地址#define LCDb_SET_RS P1OUT|=LCDb_RS //四个控制管脚的控制操作#define LCDb_SET_RW P1OUT|=LCDb_RW#define LCDb_SET_E P1OUT|=LCDb_E#define LCDb_SET_RST P8OUT|=LCDb_RST#define LCDb_CLR_RS P1OUT&=~LCDb_RS#define LCDb_CLR_RW P1OUT&=~LCDb_RW#define LCDb_CLR_E P1OUT&=~LCDb_E#define LCDb_CLR_RST P8OUT&=~LCDb_RST#define LCDb_DO P4OUT //输出数据总线端口定义#define LCDb_FUNCTION 0x38 // 液晶模式为8位,2行,5*8字符#define LCDb_BASCMD 0x30 // 基本指令集#define LCDb_CLS 0x01 // 清屏#define LCDb_HOME 0x02 // 地址返回原点,不改变DDRAM 内容#define LCDb_ENTRY 0x06 // 设定输入模式,光标加,屏幕不移动#define LCDb_C2L 0x10 // 光标左移#define LCDb_C2R 0x14 // 光标右移#define LCDb_D2L 0x18 // 屏幕左移#define LCDb_D2R 0x1C // 屏幕又移#define LCDb_ON 0x0C // 打开显示#define LCDb_OFF 0x08 // 关闭显示unsigned char RXData;unsigned char Seg_Data[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x 6f} ; //数码管编码unsigned char Result[5]; //整数转化成字符串,给LCD显示void Delayms(uint MS){uint i,j;for( i=0;i<ms;i++)< bdsfid="104" p=""></ms;i++)<>for(j=0;j<1141;j++);}void Delayus(uint US){uint i;US=US*5/4;for( i=0;i<us;i++);< bdsfid="112" p=""></us;i++);<>}void LCD12864_portini()P1DIR=0xFF;P4DIR=0xFF;P5DIR=0xFF;P8DIR=0xFF;P8OUT |=LCDb_RST;// P1OUT=0xFF;}/*函数名称: LCD12864_sendbyte功能: 向12864液晶写入一个字节数据或者指令*/void LCD12864_sendbyte(uchar DatCmd, uchar dByte) {if (DatCmd == iCmd) //指令操作LCDb_CLR_RS;elseLCDb_SET_RS;LCDb_CLR_RW; //写操作LCDb_SET_E;LCDb_DO = dByte; //写入数据//Delayus(500);Delayms(1);LCDb_CLR_E;}/*函数名称: LCD12864_sendstr功能: 向12864液晶写入一个字符串参数: ptString--字符串指针返回值 : 无*/void LCD12864_sendstr(uchar *ptString)while((*ptString)!='\0') //字符串未结束一直写{LCD12864_sendbyte(iDat, *ptString++);}}/*函数名称: LCD12864_clear功能: 12864液晶清屏参数: 无返回值 : 无*/void LCD12864_clear(void){LCD12864_sendbyte(iCmd,LCDb_CLS);Delayms(2);// 清屏指令写入后,2ms 的延时是很必要的}/*函数名称: LCD12864_gotoXY功能: 移动到指定位置参数: Row--指定的行Col--指定的列返回值 : 无*/void LCD12864_gotoXY(uchar Row, uchar Col){switch (Row) //选择行{case 2:LCD12864_sendbyte(iCmd, LCDb_L2 + Col); break; //写入第2行的指定列case 3:LCD12864_sendbyte(iCmd, LCDb_L3 + Col); break; //写入第3行的指定列case 4:LCD12864_sendbyte(iCmd, LCDb_L4 + Col); break; //写入第4行的指定列default:LCD12864_sendbyte(iCmd, LCDb_L1 + Col); break; //写入第1行的指定列}}/*函数名称: LCD12864_initial功能: 12864液晶初始化*/void LCD12864_initial(void){Delayms(100); // 等待内部复位LCD12864_portini(); //端口初始化LCD12864_sendbyte(iCmd, LCDb_FUNCTION); //功能、模式设定LCD12864_sendbyte(iCmd, LCDb_ON); //打开显示LCD12864_clear(); //清屏LCD12864_sendbyte(iCmd, LCDb_ENTRY); // 输入模式设定}void Int_char(int data){if(data/1000){Result[0]=data/1000+'0';Result[1]=data/100%10+'0';Result[2]=data/10%10+'0';Result[3]=data%10+'0';Result[4]=0;}else if(data/100){Result[0]=data/100+'0';Result[1]=data/10%10+'0';Result[2]=data%10+'0';Result[3]=0;}else if(data/10){Result[0]=data/10%10+'0';Result[1]=data%10+'0';Result[2]=0;}else{Result[0]=data%10+'0';Result[1]=0;}}unsigned char Key_Press(void){P7OUT=0xF0;if((P7IN&0x10)&&(P7IN&0x20)&&(P7IN&0x40)&&(P7IN&0 x80)) return 0x00; else return 0xFF;}unsigned char Get_Keycode(void){while(1)P7OUT=0xFE; //扫描第一列if((P7IN&0x10)==0) return 0;else if((P7IN&0x20)==0) return 4;else if((P7IN&0x40)==0) return 8;else if((P7IN&0x80)==0) return 12;P7OUT=0xFD; //扫描第二列if((P7IN&0x10)==0) return 1;else if((P7IN&0x20)==0) return 5;else if((P7IN&0x40)==0) return 9;else if((P7IN&0x80)==0) return 13;P7OUT=0xFB; //扫描第三列if((P7IN&0x10)==0) return 2;else if((P7IN&0x20)==0) return 6;else if((P7IN&0x40)==0) return 10;else if((P7IN&0x80)==0) return 14;P7OUT=0xF7; //扫描第四列if((P7IN&0x10)==0) return 3;else if((P7IN&0x20)==0) return 7;else if((P7IN&0x40)==0) return 11;else if((P7IN&0x80)==0) return 15;}}void Init_compa(){CACTL1 = CAON+CAREF_2+CARSEL; // Enable Comp, ref = 0.5*Vcc = Vin- CACTL2 = P2CA0; // Pin to CA0P1DIR |= 0x01; // P1.0 = o/p direction(CAOUT - LED) P1SEL |= 0x01; // P1.0 - CAOUT, option select}** 函数名称:初始化函数*/void Init_IIC(void){P3SEL |= 0x06; // Assign I2C pins to USCI_B0UCB0CTL1 |= UCSWRST; // Enable SW resetUCB0CTL0 = UCMST + UCMODE_3 + UCSYNC; // I2C Master, synchronous modeUCB0CTL1 = UCSSEL_2 + UCSWRST; // Use SMCLK, keep SW resetUCB0BR0 = 12; // fSCL = SMCLK/12 = ~100kHzUCB0BR1 = 0;UCB0I2CSA = 0x50; // Slave Address is 048hUCB0CTL1 &= ~UCSWRST; // Clear SW reset, resume operation IE2 |= UCB0RXIE; // Enable RX interrupt_BIS_SR(GIE);// RXCompare = 0x0; // Used to check incoming data }/** 函数名称:字节写函数*/void EEPROM_Write(unsigned char high_Address,unsigned char low_Address,unsigned char Word){while (UCB0CTL1 & UCTXSTP); // 确定总线空闲UCB0CTL1 |= UCTXSTT + UCTR; // 发送起始位,确定为发送模式UCB0TXBUF = high_Address; // 发送高位地址while((IFG2 & UCB0TXIFG)==0); // 判断是否发送完毕UCB0TXBUF = low_Address; // 发送低位地址while((IFG2 & UCB0TXIFG)==0); // 判断是否发送完毕UCB0TXBUF = Word; // 发送数据while((IFG2 & UCB0TXIFG)==0); // 判断是否发送完毕UCB0CTL1 |= UCTXSTP; // 发送停止位while((UCB0CTL1 & UCTXSTP)==1); // 判断停止位是否发送完毕}/**** 函数名称:字节读函数*/void EEPROM_readmore(){UCB0CTL1 &= ~UCTR; // 确定为读while (UCB0CTL1 & UCTXSTP); // 总线是否空闲UCB0CTL1 |= UCTXSTT; // 发送开始位}/*** 函数名称:字节写函数**/void EEPROM_read(unsigned char high_Address,unsigned char low_Address){while (UCB0CTL1 & UCTXSTP); // Ensure stop condition got sent UCB0CTL1 |= UCTXSTT + UCTR; // 发送起始位,确定为写UCB0TXBUF = high_Address; // 发送地址位高位while((IFG2 & UCB0TXIFG)==0); // 判断是否发送完毕UCB0TXBUF = low_Address; // 发送地址位低位while((IFG2 & UCB0TXIFG)==0); // 判断是否发送完毕UCB0CTL1 &= ~UCTR; // 确定为接收while (UCB0CTL1 & UCTXSTP); //UCB0CTL1 |=UCTXSTT ;while((UCB0CTL1 & UCTXSTT)==1);for(unsigned char i=0x0;i<0x2f;i++); // 延时确定数据已经被发送出去UCB0CTL1 |=UCTXSTP + UCTXNACK; // 发送停止位和NACK 位}/*** 函数名称:接收中断函数**/// USCI_B0 Data ISR#pragma vector = USCIAB0TX_VECTOR__interrupt void USCIAB0TX_ISR(void){RXData = UCB0RXBUF; // Get RX dataInt_char(RXData);LCD12864_gotoXY(2,0); //第2行,第1列显示LCD12864_sendstr(Result);/*key_code[0]=RXData%10+'0';key_code[1]=0;LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr(key_code);*/// __bic_SR_register_on_exit(CPUOFF); // Exit LPM0}void Init_UART(){P3OUT &= ~(BIT4+BIT5+BIT6+BIT7);P3SEL = 0xF0; // P3.4,5,6,7 = USCI_A0 TXD/RXD USCI_A1 TXD/RXDUCA0CTL1 |= UCSSEL_1; // CLK = ACLKUCA0BR0 = 0x03; // 32kHz/9600 = 3.41UCA0BR1 = 0x00; //UCA0MCTL = UCBRS1 + UCBRS0; // Modulation UCBRSx = 3UCA0CTL1 &= ~UCSWRST; // **Initialize USCI state machine** IE2 |= UCA0RXIE; // Enable USCI_A0 RX interrupt UCA1CTL1 |= UCSSEL_1; // CLK = ACLKUCA1BR0 = 0x03; // 32kHz/9600 = 3.41UCA1BR1 = 0x00; //UCA1MCTL = UCBRS1 + UCBRS0; // Modulation UCBRSx = 3UCA1CTL1 &= ~UCSWRST; // **Initialize USCI state machine** UC1IE |= UCA1RXIE; // Enable USCI_A0 RX interrupt _BIS_SR(GIE); //使能中断}void Init_ADC(){ADC12CTL0 = SHT0_2 + ADC12ON; // Set sampling time, turn on ADC12 ADC12CTL1 = SHP; // Use sampling timer ADC12IE = 0x01; // Enable interruptADC12CTL0 |= ENC; // Conversion enabledP6DIR &= 0x01; // P6.0, i/pP6SEL |= 0x01; // P6.0-ADC option select_BIS_SR(GIE); //使能中断}void Start_ADC(){ADC12CTL0 |= ADC12SC; // Start convn, software controlled }#pragma vector=USCIAB0RX_VECTOR__interrupt void USCI0RX_ISR(void){while (!(IFG2&UCA0TXIFG)); // USCI_A0 TX buffer ready? UCA0TXBUF = UCA0RXBUF; // TX -> RXed characterLCD12864_sendbyte(iDat,UCA0RXBUF);}#pragma vector=USCIAB1RX_VECTOR__interrupt void USCI1RX_ISR(void){while (!(UC1IFG&UCA1TXIFG)); // USCI_A0 TX buffer ready? UCA1TXBUF = UCA1RXBUF; // TX -> RXed characterLCD12864_sendbyte(iDat,UCA0RXBUF);//UCA1TXBUF = 'z';}// ADC12 interrupt service routine#pragma vector=ADC12_VECTOR__interrupt void ADC12_ISR (void){int i=ADC12MEM0;Int_char(i);LCD12864_gotoXY(2,0); //第1行,第1列显示LCD12864_sendstr(Result);/*key_code[0] =i/1000+'0';key_code[1] =i/100%10+'0';key_code[2] =i/10%10+'0';key_code[3] =i%10+'0';key_code[4] =0;LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr(key_code);*/}void Init_all(){LCD12864_initial(); //LCD初始化,包含了数码管和LED灯初始化P7DIR=0x0F; //键盘扫描初始化P7REN=0xF0; //输入上下拉电阻使能,输出上下拉不使能P7OUT=0xF0; //输入上拉Init_UART(); //串口初始化Init_compa(); //比较器初始化Init_ADC(); //ADC初始化Init_IIC(); //IIC初始化}void Test_Led(){unsigned char i=0;LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("1.Test_LED");for(;i<16;i++){P8OUT=0xF0|i;Delayms(50);}}void Test_Seg(){int i;LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("2.Test_SEG");for(i=0;i<500;i++){//4,3,2,1P1OUT&=~0x02;P1OUT|=0x10|0x08|0x04;P5OUT=Seg_Data[9]; //清楚数码管显示Delayms(1); P1OUT&=~0x04;P1OUT|=0x10|0x08|0x02;P5OUT=Seg_Data[8]; //清楚数码管显示Delayms(1); P1OUT&=~0x08;P1OUT|=0x10|0x04|0x02;P5OUT=Seg_Data[7]; //清楚数码管显示Delayms(1); P1OUT&=~0x10;P1OUT|=0x08|0x04|0x02;P5OUT=Seg_Data[6]; //清楚数码管显示Delayms(1); }P5OUT=0x00; //熄灭所有数码管}void Test_Key(){unsigned char i=0;LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("3.Test_KEY");LCD12864_gotoXY(2,0); //第2行,第1列显示LCD12864_sendstr("按键:");for(;i<16;i++){Int_char(Get_Keycode());LCD12864_gotoXY(2,3);LCD12864_sendstr(" ");LCD12864_gotoXY(2,3);LCD12864_sendstr(Result);Delayms(100); //防抖}}void Test_Uart(){LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("4.Test_UART");LCD12864_gotoXY(2,0); //第2行,第1列显示}void Test_Compa(){LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("5.Test_COMPA");}void Test_ADC(){int i=0;LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("6.Test_ADC");for(;i<200;i++){Start_ADC();Delayms(10);}}void Test_IIC(){LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("7.Test_IIC");EEPROM_Write(0x00,0x40,7); // 字节写Delayms(10);EEPROM_read(0x00,0x40);}void main( void ){// Stop watchdog timer to prevent time out resetWDTCTL = WDTPW + WDTHOLD;//关闭看门狗Init_all();while(1){Test_Led(); //1.测试LEDLCD12864_gotoXY(2,0); //第1行,第1列显示LCD12864_sendstr("请按16键!");while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子LCD12864_clear();Test_Seg(); //2.测试数码管LCD12864_gotoXY(2,0); //第1行,第1列显示LCD12864_sendstr("请按16键!");while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子LCD12864_clear();Test_Key(); //3.测试按键扫描LCD12864_gotoXY(2,0); //第1行,第1列显示LCD12864_sendstr("请按16键!");while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子LCD12864_clear();LCD12864_gotoXY(3,0); //第3行,第1列显示LCD12864_sendstr("请按16键!");Test_Uart(); //4.测试串口while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子LCD12864_clear();Test_Compa(); //5.测试比较器LCD12864_gotoXY(2,0); //第2行,第1列显示LCD12864_sendstr("请按16键!");while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子LCD12864_clear();Test_ADC(); //6.测试ADCLCD12864_gotoXY(3,0); //第3行,第1列显示LCD12864_sendstr("请按16键!");while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子LCD12864_clear();Test_IIC(); //7.测试IICDelayms(100);LCD12864_gotoXY(3,0); //第3行,第1列显示LCD12864_sendstr("测试完成");while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子LCD12864_clear();}}。
用51单片机做的万年历,显示用12864液晶
LCD12864.c#include "reg52.h"#include "intrins.h"#define uchar unsigned char#define uint unsigned int#define LCD_DB_PORT P0 //液晶DB0~DB7 #define LCD_START_ROW 0xc0 //起始行#define LCD_PAGE 0xb8 //页指令#define LCD_COL 0x40 //列指令//液晶引脚定义sbit LCD_DI=P2^0;sbit LCD_RW=P2^1;sbit LCD_E=P2^2;sbit LCD_CS1=P2^3;sbit LCD_CS2=P2^4;sbit LCD_RST=P2^5;bit Reverse_Display=0;//检查LCD是否忙bit LCD_Check_Busy(void){ LCD_DB_PORT=0xff;LCD_RW=1; _nop_(); LCD_DI=0;LCD_E=1; _nop_(); LCD_E=0;return(bit)(P0&0x80);}//向LCD发送命令void LCD_Write_Command(uchar c){ while(LCD_Check_Busy());LCD_DB_PORT=0xff; LCD_RW=0; _nop_(); LCD_DI=0;LCD_DB_PORT=c; LCD_E=1; _nop_(); LCD_E=0;}//向LCD发送数据void LCD_Write_Data(uchar d){ while(LCD_Check_Busy());LCD_DB_PORT=0xff;LCD_RW=0;_nop_();LCD_DI=1;//根据Reverse_Display决定是否反相显示if(!Reverse_Display)LCD_DB_PORT=d;else LCD_DB_PORT=~d;LCD_E=1;_nop_();LCD_E=0;}//初始化LCDvoid LCD_Initialize(void){ LCD_CS1=1;LCD_CS2=1;LCD_Write_Command(0x38);LCD_Write_Command(0x0f);LCD_Write_Command(0x01);LCD_Write_Command(0x06);LCD_Write_Command(LCD_START_ROW);}//通用显示函数//从第P页第L列开始显示W个字节数据,数据在r所指向的缓冲//每字节8位是垂直显示的,高位在下,低位在上//每个8*128的矩形区域为一页//整个LCD右由64*64的左半屏和64*64的右半屏构成void Common_Show(uchar P,uchar L,uchar W,uchar *r){ uchar i;if(L<64) //显示在左半屏或左右半屏{ LCD_CS1=1;LCD_CS2=0;LCD_Write_Command(LCD_PAGE+P);LCD_Write_Command(LCD_COL+L);if(L+W<64) //全部显示在左右半屏{ for(i=0;i<W;i++)LCD_Write_Data(r[i]);}else //如果越界则跨左右半屏显示{ for(i=0;i<64-L;i++)LCD_Write_Data(r[i]); //左半屏显示LCD_CS1=0;LCD_CS2=1; //右半屏显示LCD_Write_Command(LCD_PAGE+P);LCD_Write_Command(LCD_COL);for(i=64;i<W;i++)LCD_Write_Data(r[i]);}}else //全部显示在右半屏{ LCD_CS1=0;LCD_CS2=1;LCD_Write_Command(LCD_PAGE+P);LCD_Write_Command(LCD_COL+L-61);for(i=0;i<W;i++)LCD_Write_Data(r[i]);}}//显示8*16点阵字符void Display_A_Char_8X16(uchar P,uchar L,uchar *M) { Common_Show(P,L,8,M);Common_Show(P+1,L,8,M+8);}//显示一个16*16点阵汉字void Display_A_WORD(uchar P,uchar L,uchar *M) { Common_Show(P,L,16,M); //显示汉字上半部分Common_Show(P+1,L,16,M+16);}Main.c#include "reg52.h"#include "intrins.h"#include "string.h"#include "LCD_12864.c"#define uchar unsigned char#define uint unsigned int/*extern void LCD_Initialize(void);extern void Display_A_Char_8X16(uchar P,uchar L,uchar *M); extern void Display_A_WORD(uchar P,uchar L,uchar *M);//在调整日期时间时,用该位决定是否反白显示extern bit Reverse_Display=0;*/sbit SDA=P1^0; //DS1302数据线sbit CLK=P1^1; //DS1302时钟线sbit RST=P1^2; //DS1302复位线sbit k1=P3^4; //选择sbit k2=P3^5; //加sbit k3=P3^6; //减sbit k4=P3^7; //确定uchar tCount=0;//一年中每个月的天数,2月的天数由年份决定uchar MonthsDays[]={0,31,0,31,30,31,30,31,31,30,31,30,31};//所读取的日期时间uchar DateTime[7];//当前调整的时间对象:秒,分,时,日,月,年(0,1,2,3,4,6)//5对应星期,星期调节由年月日调整自动完成char Adjust_Index=-1;//水平与垂直偏移uchar H_Offset=10,V_Page_Offset=0;//年月日,星期,时分秒汉字点阵(16*16)------------------------------- uchar code DATE_TIME_WORDS[]={/*-- 文字: 年--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x20,0x18,0xC7,0x44,0x44,0x44,0x44,0xFC,0x44,0x44,0x44,0x44,0x 04,0x00,0x00,0x04,0x04,0x04,0x07,0x04,0x04,0x04,0x04,0xFF,0x04,0x04,0x04,0x04,0x 04,0x04,0x00,/*-- 文字: 月--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x00,0x00,0xFE,0x22,0x22,0x22,0x22,0x22,0x22,0x22,0x22,0xFE,0x 00,0x00,0x00,0x80,0x40,0x30,0x0F,0x02,0x02,0x02,0x02,0x02,0x02,0x42,0x82,0x7F,0x/*-- 文字: 日--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x00,0x00,0xFE,0x82,0x82,0x82,0x82,0x82,0x82,0x82,0xFE,0x00,0x 00,0x00,0x00,0x00,0x00,0x00,0xFF,0x40,0x40,0x40,0x40,0x40,0x40,0x40,0xFF,0x00,0x 00,0x00,0x00,/*-- 文字: 星--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x00,0x00,0xBE,0x2A,0x2A,0x2A,0xEA,0x2A,0x2A,0x2A,0x3E,0x00, 0x00,0x00,0x00,0x00,0x44,0x42,0x49,0x49,0x49,0x49,0x7F,0x49,0x49,0x49,0x49,0x41,0x 40,0x00,0x00,/*-- 文字: 期--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x04,0xFF,0x24,0x24,0x24,0xFF,0x04,0x00,0xFE,0x22,0x22,0x22,0xF E,0x00,0x00,0x88,0x48,0x2F,0x09,0x09,0x19,0xAF,0x48,0x30,0x0F,0x02,0x42,0x82,0x 7F,0x00,0x00,/*-- 文字: 时--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0xFC,0x84,0x84,0x84,0xFC,0x00,0x10,0x10,0x10,0x10,0x10,0xFF,0x0x00,0x3F,0x10,0x10,0x10,0x3F,0x00,0x00,0x01,0x06,0x40,0x80,0x7F,0x0 0,0x00,0x00,/*-- 文字: 分--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x80,0x40,0x20,0x90,0x88,0x86,0x80,0x80,0x80,0x83,0x8C,0x10,0x20,0x 40,0x80,0x00,0x00,0x80,0x40,0x20,0x18,0x07,0x00,0x40,0x80,0x40,0x3F,0x00,0x00,0x 00,0x00,0x00,/*-- 文字: 秒--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x24,0x24,0xA4,0xFE,0x23,0x22,0x00,0xC0,0x38,0x00,0xFF,0x00,0x08,0x 10,0x60,0x00,0x08,0x06,0x01,0xFF,0x01,0x06,0x81,0x80,0x40,0x40,0x27,0x10,0x0C,0x 03,0x00,0x00,};//星期几的汉字点阵(16*16)----------------------------------uchar code WEEDDAY_WORDS[]={/*-- 文字: 日--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x00,0x00,0xFE,0x82,0x82,0x82,0x82,0x82,0x82,0x82,0xFE,0x00,0x 00,0x00,0x00,0x00,0x00,0x00,0xFF,0x40,0x40,0x40,0x40,0x40,0x40,0x40,0xFF,0x00,0x 00,0x00,0x00,/*-- 文字: 一--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x 80,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x 00,0x00,0x00,/*-- 文字: 二--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x00,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x 00,0x00,0x00,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x 10,0x10,0x00,/*-- 文字: 三--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x04,0x84,0x84,0x84,0x84,0x84,0x84,0x84,0x84,0x84,0x84,0x84,0x 04,0x00,0x00,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x20,0x 20,0x20,0x00,/*-- 文字: 四--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0xFC,0x04,0x04,0x04,0xFC,0x04,0x04,0x04,0xFC,0x04,0x04,0x04,0x FC,0x00,0x00,0x00,0x7F,0x28,0x24,0x23,0x20,0x20,0x20,0x20,0x21,0x22,0x22,0x22,0x 7F,0x00,0x00,/*-- 文字: 五--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x02,0x42,0x42,0x42,0xC2,0x7E,0x42,0x42,0x42,0x42,0xC2,0x02,0x 02,0x00,0x00,0x40,0x40,0x40,0x40,0x78,0x47,0x40,0x40,0x40,0x40,0x40,0x7F,0x40,0x 40,0x40,0x00,/*-- 文字: 六--*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x20,0x20,0x20,0x20,0x20,0x20,0x21,0x22,0x2C,0x20,0x20,0x20,0x20,0x 20,0x20,0x00,0x00,0x40,0x20,0x10,0x0C,0x03,0x00,0x00,0x00,0x01,0x02,0x04,0x18,0x 60,0x00,0x00,};//半角数字点阵(8*16)---------------------------------------------------- uchar code DIGITS[]={/*-- 文字: 0 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,/*-- 文字: 1 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x 20,0x00,0x00,/*-- 文字: 2 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x 21,0x30,0x00,/*-- 文字: 3 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x 11,0x0E,0x00,/*-- 文字: 4 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x 3F,0x24,0x00,/*-- 文字: 5 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x 11,0x0E,0x00,/*-- 文字: 6 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x 11,0x0E,0x00,/*-- 文字: 7 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x 00,0x00,0x00,/*-- 文字: 8 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x 22,0x1C,0x00,/*-- 文字: 9 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x 11,0x0F,0x00,};//向DS1302写入一字节void Write_A_Byte_TO_DS1302(uchar x){ uchar i;for(i=0;i<8;i++){ SDA=x&1; CLK=1; CLK=0; x>>=1;}}//从DS1302读取一字节uchar Get_A_Byte_FROM_DS1302(void) { uchar i,b,t;for(i=0;i<8;i++){ b>>=1; t=SDA; b|=t<<7; CLK=1; CLK=0;}//BCD码转换return(b/16*10+b%16);}//从DS1302指定位置读数据uchar Read_Data(uchar addr){ uchar dat;RST=0; CLK=0; RST=1;Write_A_Byte_TO_DS1302(addr);dat=Get_A_Byte_FROM_DS1302();CLK=1; RST=0;return(dat);}//向DS1302某地址写入数据void Write_DS1302(uchar addr,uchar dat){ CLK=0; RST=1;Write_A_Byte_TO_DS1302(addr);Write_A_Byte_TO_DS1302(dat);CLK=0; RST=0;}//设置时间void SET_DS1302(void){ uchar i;Write_DS1302(0x8e,0x00);//秒分时日月年依次写入for(i=0;i<7;i++){ //秒的起始地址1000 0000(0x80)//后续依次是分,时,月,周,年,写入地址每次递增2Write_DS1302(0x80+2*i,(DateTime[i]/10<<4)|(DateTime[i]%10));}Write_DS1302(0x8e,0x80);}//读取当前日期时间void GetTime(void){ uchar i;for(i=0;i<7;i++){ DateTime[i]=Read_Data(0x81+2*i);}}//半断是否为闰年uchar isLeapYear(uint y){ return((y%4==0&&y%100!=0)||(y%400==0)); }//--------------------------------------------//求自2000.1.1开始的任何一天是星期几//函数没有通过,求出总天数后在求出星期几//因为求总天数可能会月出uint的范围//--------------------------------------------void RefreshWeekDay(void){ uint i,d,w=5; //已知1999.12.31是周五for(i=2000;i<2000+DateTime[6];i++){ d=isLeapYear(i)?366:365;w=(w+d)%7;}d=0;for(i=1;i<DateTime[4];i++)d+=MonthsDays[i];d+=DateTime[3];//保存星期,0~6表示星期日,星期一,二,、、、六,为了与DS1302的星期格式匹配,返回值需要加1DateTime[5]=(w+d)%7+1;}//年月日时分秒++/--void DateTime_Adjust(char x){ switch(Adjust_Index){ case 6: //年00-99if(x==1&&DateTime[6]<99)DateTime[6]++;if(x==-1&&DateTime[6]>0)DateTime[6]--;//获取2月天数MonthsDays[2]=isLeapYear(2000+DateTime[6])?29:28;//如果年份变化后当前月份的天数大于上限则设为上限if(DateTime[3]>MonthsDays[DateTime[4]])DateTime[3]=MonthsDays [DateTime[4]];RefreshWeekDay(); //刷新星期break;case 4: //月01-12if(x==1&&DateTime[4]<12)DateTime[4]++;if(x==-1&&DateTime[4]>1)DateTime[4]--;//获取2月份天数MonthsDays[2]=isLeapYear(2000+DateTime[6])?29:28;//如果月份变化后当前月份的天数大于上限则设为上限if(DateTime[3]>MonthsDays[DateTime[4]])DateTime[3]=MonthsDays [DateTime[4]];RefreshWeekDay(); //刷新星期break;case 3: //日00-28/29/30/31;调节之前首先根据年份得出该年中2月的天数MonthsDays[2]=isLeapYear(2000+DateTime[6])?29:28;//根据当前月份决定调节日期的上限if(x==1&&DateTime[3]<MonthsDays[DateTime[4]])DateTime[3]++;if(x==-1&&DateTime[3]>1)DateTime[3]--;RefreshWeekDay(); //刷新星期break;case 2: //时if(x==1&&DateTime[2]<23)DateTime[2]++;if(x==-1&&DateTime[3]>1)DateTime[2]--;break;case 1: //分if(x==1&&DateTime[1]<59)DateTime[1]++;if(x==-1&&DateTime[1]>1)DateTime[1]--;break;case 0: //秒if(x==1&&DateTime[0]<59)DateTime[0]++;if(x==-1&&DateTime[0]>1)DateTime[0]--;}}//定时器0每秒刷新LCD显示void T0_INT(void) interrupt 1{ TH0=-50000/256;TL0=-50000%256;if(++tCount!=2)return;tCount=0;if(Adjust_Index==-1)GetTime(); //如果未执行调整操作则正常读取当前时间//年后两位Reverse_Display=Adjust_Index==6; /*等同于{ if(Adjust_Index==6)Reverse_Display=1;else Reverse_Display=0; } */Display_A_Char_8X16(V_Page_Offset,16+H_Offset,DIGITS+DateTime [6]/10*16);Display_A_Char_8X16(V_Page_Offset,24+H_Offset,DIGITS+DateTime [6]%10*16);//月Reverse_Display=Adjust_Index==4;Display_A_Char_8X16(V_Page_Offset,48+H_Offset,DIGITS+DateTime [4]/10*16);Display_A_Char_8X16(V_Page_Offset,56+H_Offset,DIGITS+DateTime [4]%10*16);//日Reverse_Display=Adjust_Index==3;Display_A_Char_8X16(V_Page_Offset,80+H_Offset,DIGITS+DateTime [3]/10*16);Display_A_Char_8X16(V_Page_Offset,88+H_Offset,DIGITS+DateTime [3]%10*16);//星期Reverse_Display=Adjust_Index==5;Display_A_WORD(V_Page_Offset+2,96+H_Offset,WEEDDAY_WORDS +(DateTime[5]-1)*32);//时Reverse_Display=Adjust_Index==2;Display_A_Char_8X16(V_Page_Offset+5,16+H_Offset,DIGITS+DateTi me[2]/10*16);Display_A_Char_8X16(V_Page_Offset+5,24+H_Offset,DIGITS+DateTi me[2]%10*16);//分Reverse_Display=Adjust_Index==1;Display_A_Char_8X16(V_Page_Offset+5,48+H_Offset,DIGITS+DateTi me[1]/10*16);Display_A_Char_8X16(V_Page_Offset+5,56+H_Offset,DIGITS+DateTi me[1]%10*16);//秒Reverse_Display=Adjust_Index==0;Display_A_Char_8X16(V_Page_Offset+5,80+H_Offset,DIGITS+DateTi me[0]/10*16);Display_A_Char_8X16(V_Page_Offset+5,88+H_Offset,DIGITS+DateTi me[0]%10*16);}//键盘中断(INT0)void EX_INT0(void) interrupt 0{ if(k1==0) //选择调整对象{ if(Adjust_Index==-1||Adjust_Index==0)Adjust_Index=7;Adjust_Index--;if(Adjust_Index==5)Adjust_Index=4; //跳过对星期的调整}else if(k2==0)DateTime_Adjust(1); //加else if(k3==0)DateTime_Adjust(-1); //减else if(k4==0) //确定{ SET_DS1302(); //将调整后的时间写入DS1302Adjust_Index=-1; //操作索引重设为-1,时间继续正常显示}}//主程序void main(){ //液晶初始化LCD_Initialize();//显示年的固定前两位Display_A_Char_8X16(V_Page_Offset,0+H_Offset,DIGITS+2*16);Display_A_Char_8X16(V_Page_Offset,8+H_Offset,DIGITS);//显示固定汉字:年月日,星期,时分秒Display_A_WORD(V_Page_Offset,32+H_Offset,DATE_TIME_WORDS+ 0*32);Display_A_WORD(V_Page_Offset,64+H_Offset,DATE_TIME_WORDS+ 1*32);Display_A_WORD(V_Page_Offset,96+H_Offset,DATE_TIME_WORDS+ 2*32);Display_A_WORD(V_Page_Offset+2,64+H_Offset,DATE_TIME_WORD S+3*32);Display_A_WORD(V_Page_Offset+2,80+H_Offset,DATE_TIME_WORD S+4*32);Display_A_WORD(V_Page_Offset+5,32+H_Offset,DATE_TIME_WORD S+5*32);Display_A_WORD(V_Page_Offset+5,64+H_Offset,DATE_TIME_WORD S+6*32);Display_A_WORD(V_Page_Offset+5,96+H_Offset,DATE_TIME_WORD S+7*32);//允许INT0,T0中断IE=0x83;IP=0x01;IT0=0x01;TH0=-50000/256;TL0=-50000%256;TR0=1;while(1);}。
51单片机12864LCD显示

C SR=1:AC5—AC0为垂直卷动地址
72us
址
5 4 32
1 SR=0:AC3—AC0为ICON IRAM地址
设定绘图 RAM地址
A A A AA A A 0 0 1 C C C C C C C 设定CGRAM地址到地址计数器(AC)
6 5 4 32 1 0
72us
VCC 0 V Vss Vdd 4 6 8 2 1 T SS DB0DB1DB2DB3DB4DB5DB6DB7BR/WER 01234567 BBBBBBBBSW DDDDDDDDRRE 0.1pF D K N 0 G 1 01234567 BBBBBBBB DDDDDDDD 12345678234567890 1234567822222222333333334 VCC P1.0/T2 P2.0/A8P2.1/A9 P1.2/ECI P2.2/A10P2.3/A11P2.4/A12P2.5/A13P2.6/A14P2.7/A15 P0.7/AD7P0.6/AD6P0.5/AD5P0.4/AD4P0.3/AD3P0.2/AD2P0.1/AD1P0.0/AD0 P1.1/T2EXP1.3/CEX0P1.4/CEX1P1.5/CEX2P1.6/CEX3P1.7/CEX4 1 5 0 8 RSTP3.0/RxDP3.1/TxDP3.2/INT0P3.3/INT1P3.4/T0P3.5/T1P3.6/WRP3.7/RDXTAL2XTAL1VSSPSENALE/PROGEA/VPP 01234567890901 9 11111111112233 SW RRE
CL
72us
功能设定
0
0
0
0
1
D L
X
R E
X
X
基于51单片机的12864LCD显示驱动
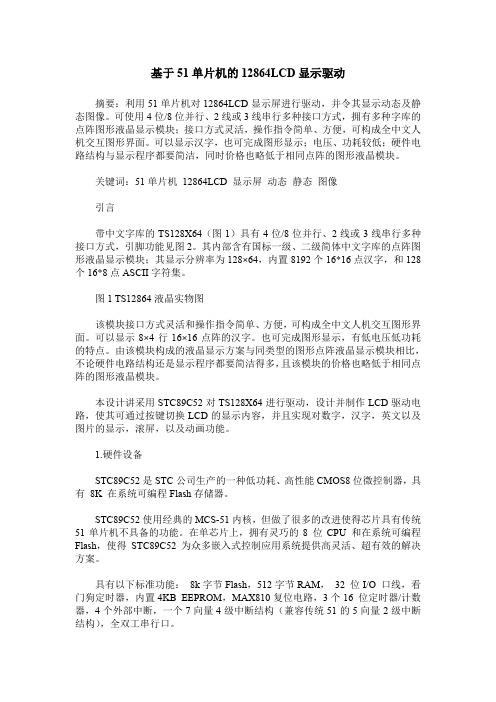
基于51单片机的12864LCD显示驱动摘要:利用51单片机对12864LCD显示屏进行驱动,并令其显示动态及静态图像。
可使用4位/8位并行、2线或3线串行多种接口方式,拥有多种字库的点阵图形液晶显示模块;接口方式灵活,操作指令简单、方便,可构成全中文人机交互图形界面。
可以显示汉字,也可完成图形显示;电压、功耗较低;硬件电路结构与显示程序都要简洁,同时价格也略低于相同点阵的图形液晶模块。
关键词:51单片机12864LCD 显示屏动态静态图像引言带中文字库的TS128X64(图1)具有4位/8位并行、2线或3线串行多种接口方式,引脚功能见图2。
其内部含有国标一级、二级简体中文字库的点阵图形液晶显示模块;其显示分辨率为128×64,内置8192个16*16点汉字,和128个16*8点ASCII字符集。
图1 TS12864液晶实物图该模块接口方式灵活和操作指令简单、方便,可构成全中文人机交互图形界面。
可以显示8×4行16×16点阵的汉字。
也可完成图形显示,有低电压低功耗的特点。
由该模块构成的液晶显示方案与同类型的图形点阵液晶显示模块相比,不论硬件电路结构还是显示程序都要简洁得多,且该模块的价格也略低于相同点阵的图形液晶模块。
本设计讲采用STC89C52对TS128X64进行驱动,设计并制作LCD驱动电路,使其可通过按键切换LCD的显示内容,并且实现对数字,汉字,英文以及图片的显示,滚屏,以及动画功能。
1.硬件设备STC89C52是STC公司生产的一种低功耗、高性能CMOS8位微控制器,具有8K 在系统可编程Flash存储器。
STC89C52使用经典的MCS-51内核,但做了很多的改进使得芯片具有传统51单片机不具备的功能。
在单芯片上,拥有灵巧的8 位CPU 和在系统可编程Flash,使得STC89C52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。
具有以下标准功能:8k字节Flash,512字节RAM,32 位I/O 口线,看门狗定时器,内置4KB EEPROM,MAX810复位电路,3个16 位定时器/计数器,4个外部中断,一个7向量4级中断结构(兼容传统51的5向量2级中断结构),全双工串行口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用51单片机控制12864显示数字时钟里面有128564显示汉字的程序,自己研究下,不过是用msp430控制的,你改改端口i就可以了。
#include "msp430x26x.h"#define uchar unsigned char#define uint unsigned int#define iDat 1 //数据标志#define iCmd 0 //指令标志#define LCDb_RS 0x20 //定义四个控制引脚#define LCDb_RW 0x40#define LCDb_E 0x80#define LCDb_RST 0x04#define LCDb_L1 0x80 //第一行的地址#define LCDb_L2 0x90 //第二行的地址#define LCDb_L3 0x88 //第三行的地址#define LCDb_L4 0x98 //第四行的地址#define LCDb_SET_RS P1OUT|=LCDb_RS //四个控制管脚的控制操作#define LCDb_SET_RW P1OUT|=LCDb_RW#define LCDb_SET_E P1OUT|=LCDb_E#define LCDb_SET_RST P8OUT|=LCDb_RST#define LCDb_CLR_RS P1OUT&=~LCDb_RS#define LCDb_CLR_RW P1OUT&=~LCDb_RW#define LCDb_CLR_E P1OUT&=~LCDb_E#define LCDb_CLR_RST P8OUT&=~LCDb_RST#define LCDb_DO P4OUT //输出数据总线端口定义#define LCDb_FUNCTION 0x38 // 液晶模式为8位,2行,5*8字符#define LCDb_BASCMD 0x30 // 基本指令集#define LCDb_CLS 0x01 // 清屏#define LCDb_HOME 0x02 // 地址返回原点,不改变DDRAM内容#define LCDb_ENTRY 0x06 // 设定输入模式,光标加,屏幕不移动#define LCDb_C2L 0x10 // 光标左移#define LCDb_C2R 0x14 // 光标右移#define LCDb_D2L 0x18 // 屏幕左移#define LCDb_D2R 0x1C // 屏幕又移#define LCDb_ON 0x0C // 打开显示#define LCDb_OFF 0x08 // 关闭显示unsigned char RXData;unsigned char Seg_Data[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f} ; //数码管编码unsigned char Result[5]; //整数转化成字符串,给LCD显示void Delayms(uint MS){uint i,j;for( i=0;i<MS;i++)for(j=0;j<1141;j++);}void Delayus(uint US){uint i;US=US*5/4;for( i=0;i<US;i++);}void LCD12864_portini(){P1DIR=0xFF;P4DIR=0xFF;P5DIR=0xFF;P8DIR=0xFF;P8OUT |=LCDb_RST;// P1OUT=0xFF;}/*函数名称: LCD12864_sendbyte功能: 向12864液晶写入一个字节数据或者指令*/void LCD12864_sendbyte(uchar DatCmd, uchar dByte){if (DatCmd == iCmd) //指令操作LCDb_CLR_RS;elseLCDb_SET_RS;LCDb_CLR_RW; //写操作LCDb_SET_E;LCDb_DO = dByte; //写入数据//Delayus(500);Delayms(1);LCDb_CLR_E;}/*函数名称: LCD12864_sendstr功能: 向12864液晶写入一个字符串参数: ptString--字符串指针返回值 : 无*/void LCD12864_sendstr(uchar *ptString){while((*ptString)!='\0') //字符串未结束一直写{LCD12864_sendbyte(iDat, *ptString++);}}/*函数名称: LCD12864_clear功能: 12864液晶清屏参数: 无返回值 : 无*/void LCD12864_clear(void){LCD12864_sendbyte(iCmd,LCDb_CLS);Delayms(2);// 清屏指令写入后,2ms 的延时是很必要的}/*函数名称: LCD12864_gotoXY功能: 移动到指定位置参数: Row--指定的行Col--指定的列返回值 : 无*/void LCD12864_gotoXY(uchar Row, uchar Col){switch (Row) //选择行{case 2:LCD12864_sendbyte(iCmd, LCDb_L2 + Col); break; //写入第2行的指定列case 3:LCD12864_sendbyte(iCmd, LCDb_L3 + Col); break; //写入第3行的指定列case 4:LCD12864_sendbyte(iCmd, LCDb_L4 + Col); break; //写入第4行的指定列default:LCD12864_sendbyte(iCmd, LCDb_L1 + Col); break; //写入第1行的指定列}}/*函数名称: LCD12864_initial功能: 12864液晶初始化*/void LCD12864_initial(void){Delayms(100); // 等待内部复位LCD12864_portini(); //端口初始化LCD12864_sendbyte(iCmd, LCDb_FUNCTION); //功能、模式设定LCD12864_sendbyte(iCmd, LCDb_ON); //打开显示LCD12864_clear(); //清屏LCD12864_sendbyte(iCmd, LCDb_ENTRY); // 输入模式设定}void Int_char(int data){if(data/1000){Result[0]=data/1000+'0';Result[1]=data/100%10+'0';Result[2]=data/10%10+'0';Result[3]=data%10+'0';Result[4]=0;}else if(data/100){Result[0]=data/100+'0';Result[1]=data/10%10+'0';Result[2]=data%10+'0';Result[3]=0;}else if(data/10){Result[0]=data/10%10+'0';Result[1]=data%10+'0';Result[2]=0;}else{Result[0]=data%10+'0';Result[1]=0;}}unsigned char Key_Press(void){P7OUT=0xF0;if((P7IN&0x10)&&(P7IN&0x20)&&(P7IN&0x40)&&(P7IN&0x80)) return 0x00; else return 0xFF;}unsigned char Get_Keycode(void){while(1){P7OUT=0xFE; //扫描第一列if((P7IN&0x10)==0) return 0;else if((P7IN&0x20)==0) return 4;else if((P7IN&0x40)==0) return 8;else if((P7IN&0x80)==0) return 12;P7OUT=0xFD; //扫描第二列if((P7IN&0x10)==0) return 1;else if((P7IN&0x20)==0) return 5;else if((P7IN&0x40)==0) return 9;else if((P7IN&0x80)==0) return 13;P7OUT=0xFB; //扫描第三列if((P7IN&0x10)==0) return 2;else if((P7IN&0x20)==0) return 6;else if((P7IN&0x40)==0) return 10;else if((P7IN&0x80)==0) return 14;P7OUT=0xF7; //扫描第四列if((P7IN&0x10)==0) return 3;else if((P7IN&0x20)==0) return 7;else if((P7IN&0x40)==0) return 11;else if((P7IN&0x80)==0) return 15;}}void Init_compa(){CACTL1 = CAON+CAREF_2+CARSEL; // Enable Comp, ref = 0.5*Vcc = Vin- CACTL2 = P2CA0; // Pin to CA0P1DIR |= 0x01; // P1.0 = o/p direction(CAOUT - LED) P1SEL |= 0x01; // P1.0 - CAOUT, option select}/*** 函数名称:初始化函数*/void Init_IIC(void){P3SEL |= 0x06; // Assign I2C pins to USCI_B0UCB0CTL1 |= UCSWRST; // Enable SW resetUCB0CTL0 = UCMST + UCMODE_3 + UCSYNC; // I2C Master, synchronous modeUCB0CTL1 = UCSSEL_2 + UCSWRST; // Use SMCLK, keep SW resetUCB0BR0 = 12; // fSCL = SMCLK/12 = ~100kHzUCB0BR1 = 0;UCB0I2CSA = 0x50; // Slave Address is 048hUCB0CTL1 &= ~UCSWRST; // Clear SW reset, resume operation IE2 |= UCB0RXIE; // Enable RX interrupt_BIS_SR(GIE);// RXCompare = 0x0; // Used to check incoming data }/** 函数名称:字节写函数*/void EEPROM_Write(unsigned char high_Address,unsigned char low_Address,unsigned char Word){while (UCB0CTL1 & UCTXSTP); // 确定总线空闲UCB0CTL1 |= UCTXSTT + UCTR; // 发送起始位,确定为发送模式UCB0TXBUF = high_Address; // 发送高位地址while((IFG2 & UCB0TXIFG)==0); // 判断是否发送完毕UCB0TXBUF = low_Address; // 发送低位地址while((IFG2 & UCB0TXIFG)==0); // 判断是否发送完毕UCB0TXBUF = Word; // 发送数据while((IFG2 & UCB0TXIFG)==0); // 判断是否发送完毕UCB0CTL1 |= UCTXSTP; // 发送停止位while((UCB0CTL1 & UCTXSTP)==1); // 判断停止位是否发送完毕}/**** 函数名称:字节读函数*/void EEPROM_readmore(){UCB0CTL1 &= ~UCTR; // 确定为读while (UCB0CTL1 & UCTXSTP); // 总线是否空闲UCB0CTL1 |= UCTXSTT; // 发送开始位}/*** 函数名称:字节写函数**/void EEPROM_read(unsigned char high_Address,unsigned char low_Address){while (UCB0CTL1 & UCTXSTP); // Ensure stop condition got sent UCB0CTL1 |= UCTXSTT + UCTR; // 发送起始位,确定为写UCB0TXBUF = high_Address; // 发送地址位高位while((IFG2 & UCB0TXIFG)==0); // 判断是否发送完毕UCB0TXBUF = low_Address; // 发送地址位低位while((IFG2 & UCB0TXIFG)==0); // 判断是否发送完毕UCB0CTL1 &= ~UCTR; // 确定为接收while (UCB0CTL1 & UCTXSTP); //UCB0CTL1 |=UCTXSTT ;while((UCB0CTL1 & UCTXSTT)==1);for(unsigned char i=0x0;i<0x2f;i++); // 延时确定数据已经被发送出去UCB0CTL1 |=UCTXSTP + UCTXNACK; // 发送停止位和NACK位}/*** 函数名称:接收中断函数**/// USCI_B0 Data ISR#pragma vector = USCIAB0TX_VECTOR__interrupt void USCIAB0TX_ISR(void){RXData = UCB0RXBUF; // Get RX dataInt_char(RXData);LCD12864_gotoXY(2,0); //第2行,第1列显示LCD12864_sendstr(Result);/*key_code[0]=RXData%10+'0';key_code[1]=0;LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr(key_code);*/// __bic_SR_register_on_exit(CPUOFF); // Exit LPM0}void Init_UART(){P3OUT &= ~(BIT4+BIT5+BIT6+BIT7);P3SEL = 0xF0; // P3.4,5,6,7 = USCI_A0 TXD/RXD USCI_A1 TXD/RXDUCA0CTL1 |= UCSSEL_1; // CLK = ACLKUCA0BR0 = 0x03; // 32kHz/9600 = 3.41UCA0BR1 = 0x00; //UCA0MCTL = UCBRS1 + UCBRS0; // Modulation UCBRSx = 3UCA0CTL1 &= ~UCSWRST; // **Initialize USCI state machine** IE2 |= UCA0RXIE; // Enable USCI_A0 RX interruptUCA1CTL1 |= UCSSEL_1; // CLK = ACLKUCA1BR0 = 0x03; // 32kHz/9600 = 3.41UCA1BR1 = 0x00; //UCA1MCTL = UCBRS1 + UCBRS0; // Modulation UCBRSx = 3UCA1CTL1 &= ~UCSWRST; // **Initialize USCI state machine** UC1IE |= UCA1RXIE; // Enable USCI_A0 RX interrupt_BIS_SR(GIE); //使能中断}void Init_ADC(){ADC12CTL0 = SHT0_2 + ADC12ON; // Set sampling time, turn on ADC12 ADC12CTL1 = SHP; // Use sampling timerADC12IE = 0x01; // Enable interruptADC12CTL0 |= ENC; // Conversion enabledP6DIR &= 0x01; // P6.0, i/pP6SEL |= 0x01; // P6.0-ADC option select_BIS_SR(GIE); //使能中断}void Start_ADC(){ADC12CTL0 |= ADC12SC; // Start convn, software controlled}#pragma vector=USCIAB0RX_VECTOR__interrupt void USCI0RX_ISR(void){while (!(IFG2&UCA0TXIFG)); // USCI_A0 TX buffer ready? UCA0TXBUF = UCA0RXBUF; // TX -> RXed characterLCD12864_sendbyte(iDat,UCA0RXBUF);}#pragma vector=USCIAB1RX_VECTOR__interrupt void USCI1RX_ISR(void){while (!(UC1IFG&UCA1TXIFG)); // USCI_A0 TX buffer ready? UCA1TXBUF = UCA1RXBUF; // TX -> RXed characterLCD12864_sendbyte(iDat,UCA0RXBUF);//UCA1TXBUF = 'z';}// ADC12 interrupt service routine#pragma vector=ADC12_VECTOR__interrupt void ADC12_ISR (void){int i=ADC12MEM0;Int_char(i);LCD12864_gotoXY(2,0); //第1行,第1列显示LCD12864_sendstr(Result);/*key_code[0] =i/1000+'0';key_code[1] =i/100%10+'0';key_code[2] =i/10%10+'0';key_code[3] =i%10+'0';key_code[4] =0;LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr(key_code);*/}void Init_all(){LCD12864_initial(); //LCD初始化,包含了数码管和LED灯初始化P7DIR=0x0F; //键盘扫描初始化P7REN=0xF0; //输入上下拉电阻使能,输出上下拉不使能P7OUT=0xF0; //输入上拉Init_UART(); //串口初始化Init_compa(); //比较器初始化Init_ADC(); //ADC初始化Init_IIC(); //IIC初始化}void Test_Led(){unsigned char i=0;LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("1.Test_LED");for(;i<16;i++){P8OUT=0xF0|i;Delayms(50);}}void Test_Seg(){int i;LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("2.Test_SEG");for(i=0;i<500;i++){//4,3,2,1P1OUT&=~0x02;P1OUT|=0x10|0x08|0x04;P5OUT=Seg_Data[9]; //清楚数码管显示Delayms(1);P1OUT&=~0x04;P1OUT|=0x10|0x08|0x02;P5OUT=Seg_Data[8]; //清楚数码管显示Delayms(1);P1OUT&=~0x08;P1OUT|=0x10|0x04|0x02;P5OUT=Seg_Data[7]; //清楚数码管显示Delayms(1);P1OUT&=~0x10;P1OUT|=0x08|0x04|0x02;P5OUT=Seg_Data[6]; //清楚数码管显示Delayms(1);}P5OUT=0x00; //熄灭所有数码管}void Test_Key(){unsigned char i=0;LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("3.Test_KEY");LCD12864_gotoXY(2,0); //第2行,第1列显示LCD12864_sendstr("按键:");for(;i<16;i++){Int_char(Get_Keycode());LCD12864_gotoXY(2,3);LCD12864_sendstr(" ");LCD12864_gotoXY(2,3);LCD12864_sendstr(Result);Delayms(100); //防抖}}void Test_Uart(){LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("4.Test_UART");LCD12864_gotoXY(2,0); //第2行,第1列显示}void Test_Compa(){LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("5.Test_COMPA");}void Test_ADC(){int i=0;LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("6.Test_ADC");for(;i<200;i++){Start_ADC();Delayms(10);}}void Test_IIC(){LCD12864_gotoXY(1,0); //第1行,第1列显示LCD12864_sendstr("7.Test_IIC");EEPROM_Write(0x00,0x40,7); // 字节写Delayms(10);EEPROM_read(0x00,0x40);}void main( void ){// Stop watchdog timer to prevent time out resetWDTCTL = WDTPW + WDTHOLD;//关闭看门狗Init_all();while(1){Test_Led(); //1.测试LEDLCD12864_gotoXY(2,0); //第1行,第1列显示LCD12864_sendstr("请按16键!");while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子 LCD12864_clear();Test_Seg(); //2.测试数码管LCD12864_gotoXY(2,0); //第1行,第1列显示LCD12864_sendstr("请按16键!");while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子 LCD12864_clear();Test_Key(); //3.测试按键扫描LCD12864_gotoXY(2,0); //第1行,第1列显示LCD12864_sendstr("请按16键!");while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子 LCD12864_clear();LCD12864_gotoXY(3,0); //第3行,第1列显示LCD12864_sendstr("请按16键!");Test_Uart(); //4.测试串口while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子 LCD12864_clear();Test_Compa(); //5.测试比较器LCD12864_gotoXY(2,0); //第2行,第1列显示LCD12864_sendstr("请按16键!");while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子 LCD12864_clear();Test_ADC(); //6.测试ADCLCD12864_gotoXY(3,0); //第3行,第1列显示LCD12864_sendstr("请按16键!");while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子 LCD12864_clear();Test_IIC(); //7.测试IICDelayms(100);LCD12864_gotoXY(3,0); //第3行,第1列显示LCD12864_sendstr("测试完成");while(!(Get_Keycode()==15)); //按下最后一键测试下一个例子 LCD12864_clear();}}。