10 目标跟踪与应用实例2010
目标定位跟踪原理及应用源程序

目标定位跟踪原理及应用源程序目标定位跟踪是指通过使用传感器、算法和数据处理技术,对目标进行实时定位和跟踪的一种技术。
在许多领域中,目标定位跟踪技术都有着广泛的应用,如航空航天、无人驾驶、物流配送等。
目标定位跟踪的原理主要包括目标检测、目标识别、目标定位和目标跟踪四个步骤。
首先是目标检测,即通过图像或视频数据,利用计算机视觉算法检测出图像中的目标物体。
目标检测算法有很多种,常见的有基于特征的检测算法、基于深度学习的检测算法等。
这些算法可以根据目标物体的特征或者样本进行训练,从而在图像中准确地检测出目标物体。
接下来是目标识别,即通过对检测到的目标物体进行分类和识别。
目标识别算法通常使用分类器或神经网络模型,根据目标物体的特征进行分类,将其与已知的目标类别进行匹配。
目标识别的准确性对于后续的定位和跟踪过程至关重要。
然后是目标定位,即确定目标物体在图像或场景中的位置。
目标定位可以使用传感器获取目标物体的位置信息,如全球定位系统(GPS)、激光雷达等。
同时,也可以通过计算机视觉算法对目标物体进行几何定位,利用目标物体在图像中的几何特征和视觉几何关系来估计其位置。
最后是目标跟踪,即在连续的图像或场景中,对目标物体进行实时跟踪。
目标跟踪算法通常使用滤波器或者神经网络模型,根据目标物体的运动特征、外观特征等进行跟踪。
目标跟踪算法需要实时地更新目标的位置信息,以保持对目标物体的准确跟踪。
目标定位跟踪技术在许多应用领域都有着广泛的应用。
在航空航天领域,目标定位跟踪技术被广泛应用于飞行器的自主导航和目标识别。
在无人驾驶领域,目标定位跟踪技术可以帮助汽车实现自动驾驶,并准确地识别和跟踪道路上的其他车辆和行人。
在物流配送领域,目标定位跟踪技术可以实现对货物和运输车辆的实时监控和管理。
在实际应用中,目标定位跟踪技术还面临一些挑战和问题。
首先是目标物体的多样性和复杂性,不同的目标物体具有不同的形状、大小、颜色等特征,这对目标检测和识别算法提出了更高的要求。
目标检测与跟踪算法的研究与应用

目标检测与跟踪算法的研究与应用摘要:目标检测与跟踪是计算机视觉领域的重要研究方向,广泛应用于自动驾驶、智能监控、人脸识别等领域。
本文将介绍目标检测与跟踪的基本概念、常用算法以及在实际应用中的一些挑战和解决方法。
1. 引言目标检测与跟踪是计算机视觉和图像处理领域的核心问题之一。
目标检测主要是通过算法从图像或视频中识别出感兴趣的目标物体,并对其进行定位和分类。
目标跟踪则是在序列图像或视频中,根据目标物体的先前信息,追踪目标物体在连续帧中的位置和形态变化。
2. 目标检测算法目标检测算法主要分为两类:传统方法和深度学习方法。
传统方法包括基于特征的算法(如Haar特征、HOG特征和SIFT特征)和基于学习的算法(如AdaBoost和支持向量机)。
这些算法在处理速度和准确性方面有一定的优势,但在复杂场景中性能有限。
深度学习方法则采用神经网络结构,通过大规模数据集的训练,能够达到更高的准确性和鲁棒性。
主要的深度学习方法包括卷积神经网络(CNN)和区域生成网络(R-CNN)。
3. 目标跟踪算法目标跟踪算法主要分为两类:基于特征的算法和基于深度学习的算法。
基于特征的算法主要利用目标物体在连续帧中的位置和外观特征进行匹配,如相关滤波器和粒子滤波器。
这些算法在目标物体尺度变化、遮挡和背景杂乱等情况下存在一定的限制。
基于深度学习的算法则通过神经网络进行目标跟踪,通过对大量数据的学习,可以在各种复杂情况下实现高精度跟踪。
主要的基于深度学习的算法包括循环神经网络(RNN)和长短时记忆网络(LSTM)。
4. 应用现状与挑战目标检测与跟踪算法在各种实际应用中得到了广泛的应用。
在自动驾驶领域,目标检测与跟踪算法可以识别道路上的车辆、行人和交通标志,并实现车辆的自主导航和交通规则遵守。
在智能监控领域,目标检测与跟踪算法可以识别异常行为并报警,有效提高安全性。
在人脸识别领域,目标检测与跟踪算法可以识别人脸并进行身份验证和人脸表情识别。
目标追踪综述
01目标跟踪简介目标跟踪是计算机视觉领域的一个重要问题,目前广泛应用在体育赛事转播、安防监控和无人机、无人车、机器人等领域。
下面是一些应用的例子。
02目标跟踪任务分类了解了目标跟踪的用途,我们接下来看目标跟踪有哪些研究领域呢?目标跟踪可以分为以下几种任务:•单目标跟踪- 给定一个目标,追踪这个目标的位置。
•多目标跟踪- 追踪多个目标的位置•Person Re-ID- 行人重识别,是利用计算机视觉技术判断图像或者视频序列中是否存在特定行人的技术。
广泛被认为是一个图像检索的子问题。
给定一个监控行人图像,检索跨设备下的该行人图像。
旨在弥补固定的摄像头的视觉局限,并可与行人检测/行人跟踪技术相结合。
•MTMCT - 多目标多摄像头跟踪(Multi-target Multi-camera Tracking),跟踪多个摄像头拍摄的多个人•姿态跟踪- 追踪人的姿态按照任务计算类型又可以分为以下2类。
•在线跟踪- 在线跟踪需要实时处理任务,通过过去和现在帧来跟踪未来帧中物体的位置。
•离线跟踪- 离线跟踪是离线处理任务,可以通过过去、现在和未来的帧来推断物体的位置,因此准确率会在线跟踪高。
03目标跟踪的困难点虽然目标追踪的应用前景非常广泛,但还是有一些问题限制了它的应用,我们看下有哪些问题呢?•形态变化- 姿态变化是目标跟踪中常见的干扰问题。
运动目标发生姿态变化时, 会导致它的特征以及外观模型发生改变, 容易导致跟踪失败。
例如:体育比赛中的运动员、马路上的行人。
•尺度变化- 尺度的自适应也是目标跟踪中的关键问题。
当目标尺度缩小时, 由于跟踪框不能自适应跟踪, 会将很多背景信息包含在内, 导致目标模型的更新错误:当目标尺度增大时, 由于跟踪框不能将目标完全包括在内, 跟踪框内目标信息不全, 也会导致目标模型的更新错误。
因此, 实现尺度自适应跟踪是十分必要的。
•遮挡与消失- 目标在运动过程中可能出现被遮挡或者短暂的消失情况。
目标追踪综述
01目标跟踪简介目标跟踪是计算机视觉领域的一个重要问题,目前广泛应用在体育赛事转播、安防监控和无人机、无人车、机器人等领域。
下面是一些应用的例子。
02目标跟踪任务分类了解了目标跟踪的用途,我们接下来看目标跟踪有哪些研究领域呢?目标跟踪可以分为以下几种任务:•单目标跟踪- 给定一个目标,追踪这个目标的位置。
•多目标跟踪- 追踪多个目标的位置•Person Re-ID- 行人重识别,是利用计算机视觉技术判断图像或者视频序列中是否存在特定行人的技术。
广泛被认为是一个图像检索的子问题。
给定一个监控行人图像,检索跨设备下的该行人图像。
旨在弥补固定的摄像头的视觉局限,并可与行人检测/行人跟踪技术相结合。
•MTMCT - 多目标多摄像头跟踪(Multi-target Multi-camera Tracking),跟踪多个摄像头拍摄的多个人•姿态跟踪- 追踪人的姿态按照任务计算类型又可以分为以下2类。
•在线跟踪- 在线跟踪需要实时处理任务,通过过去和现在帧来跟踪未来帧中物体的位置。
•离线跟踪- 离线跟踪是离线处理任务,可以通过过去、现在和未来的帧来推断物体的位置,因此准确率会在线跟踪高。
03目标跟踪的困难点虽然目标追踪的应用前景非常广泛,但还是有一些问题限制了它的应用,我们看下有哪些问题呢?•形态变化- 姿态变化是目标跟踪中常见的干扰问题。
运动目标发生姿态变化时, 会导致它的特征以及外观模型发生改变, 容易导致跟踪失败。
例如:体育比赛中的运动员、马路上的行人。
•尺度变化- 尺度的自适应也是目标跟踪中的关键问题。
当目标尺度缩小时, 由于跟踪框不能自适应跟踪, 会将很多背景信息包含在内, 导致目标模型的更新错误:当目标尺度增大时, 由于跟踪框不能将目标完全包括在内, 跟踪框内目标信息不全, 也会导致目标模型的更新错误。
因此, 实现尺度自适应跟踪是十分必要的。
•遮挡与消失- 目标在运动过程中可能出现被遮挡或者短暂的消失情况。
目标跟踪应用场景

目标跟踪应用场景以目标跟踪应用场景为标题,写一篇文章:目标跟踪是计算机视觉领域的一个重要研究方向,它在很多应用场景中发挥着重要的作用。
本文将介绍目标跟踪的一些应用场景以及相关的技术和方法。
一、智能监控系统智能监控系统是目标跟踪的一个重要应用场景。
通过使用目标跟踪算法,可以实现对监控视频中的目标进行实时跟踪,从而提供更加准确和高效的监控服务。
例如,在一个公共场所安装了监控摄像头后,可以通过目标跟踪算法实时监测人员的活动轨迹,识别异常行为,及时发出警报。
二、自动驾驶自动驾驶技术是近年来备受关注的领域之一。
在自动驾驶汽车中,目标跟踪算法可以用于识别和跟踪其他车辆、行人、交通信号灯等目标。
通过实时监测周围环境中的目标,自动驾驶汽车可以做出相应的决策和控制,确保行驶安全。
三、无人机应用目标跟踪技术在无人机应用中也发挥着重要的作用。
无人机可以通过搭载摄像头和目标跟踪算法来实现对特定目标的跟踪。
例如,无人机可以用于对农田进行巡查,通过目标跟踪算法可以实时监测农田中的植物生长情况,及时发现病虫害并采取相应的措施。
四、虚拟现实和增强现实目标跟踪技术在虚拟现实和增强现实中也有广泛的应用。
通过使用目标跟踪算法,可以实现对现实世界中的目标进行实时跟踪和定位,从而将虚拟内容与现实世界进行融合。
例如,在虚拟现实游戏中,可以通过目标跟踪算法将虚拟角色与现实世界进行互动,提供更加沉浸式的游戏体验。
五、智能交通系统目标跟踪技术在智能交通系统中也有着广泛的应用。
通过使用目标跟踪算法,可以实现对交通工具、行人等目标的跟踪和定位,从而提供实时的交通信息和服务。
例如,在城市交通管理中,可以通过目标跟踪算法实时监测道路上的车辆流量,优化交通信号灯的控制,减少交通拥堵。
六、体育比赛分析目标跟踪技术在体育比赛分析中也有重要的应用。
通过使用目标跟踪算法,可以实时跟踪运动员的位置和动作,从而提供更加准确的比赛数据和分析结果。
例如,在足球比赛中,可以通过目标跟踪算法实时跟踪球员的位置和球的运动轨迹,从而进行比赛统计和战术分析。
目标跟踪算法的研究与应用

目标跟踪算法的研究与应用目标跟踪是计算机视觉领域的一个重要研究方向,它指的是在连续的图像序列中对目标进行自动检测和跟踪,实现对该目标的实时位置、尺寸、形态等的估计。
目标跟踪算法的研究与应用,在视觉监控、机器人导航、自动驾驶、医学影像等诸多领域都具有广泛的应用价值。
目标跟踪方法主要分为两类:传统跟踪算法和深度学习跟踪算法。
传统跟踪算法主要有卡尔曼滤波算法、粒子滤波算法、均值追踪算法等;深度学习跟踪算法则是在深度神经网络的基础上,利用卷积神经网络、循环神经网络等深度学习网络构建出的跟踪算法,如神经网络跟踪器、半监督跟踪器、端到端跟踪器等。
传统跟踪算法的优点在于运算速度快、运行效率高、噪声鲁棒性好,适合在资源受限的设备上实时运算;但其缺点在于模型的鲁棒性不强,易受到光照、目标变形等因素的影响。
深度学习跟踪算法则在鲁棒性、精度等方面优于传统算法,在复杂场景下的跟踪性能也更加稳定。
但深度学习算法的计算成本较高,需要通过GPU等高性能计算设备进行计算,且对数据量和训练样本的要求也更高。
目前,对于目标跟踪算法的研究重点主要是在提升算法的性能和鲁棒性方面。
其中,针对深度学习跟踪算法,一些新技术和模型的应用,使得跟踪算法的性能得到了进一步的提升。
例如,结合卷积网络和循环网络构成的Siamese网络,可以在计算时间上获得一定优势,同时又具有良好的跟踪精度;将长短记忆网络(LSTM)应用于跟踪目标的动态特性建模,实现了对运动物体的良好跟踪效果。
除了研究跟踪算法的数学模型和算法体系,目标跟踪技术的应用也是近年来的热点之一。
在智能安防领域,通过智能监控摄像头实现对商店、街道、小区等的监控,跟踪人员、车辆和物品,大大提高了安全性和治安水平。
在智能驾驶领域,目标跟踪技术的应用,实现了对其他车辆、行人的跟踪以及障碍物的识别,为智能车辆的进一步发展提供了重要技术保障。
当然,目标跟踪技术也存在着一些问题和不足。
例如,在复杂场景下的跟踪效果容易受到干扰,如光照变化、背景干扰等;同时,跟踪算法对计算设备、硬件环境和数据质量的要求比较高,从而阻碍了其在广泛应用中的推广。
移动目标跟踪的算法研究及其应用
移动目标跟踪的算法研究及其应用第一部分:前言随着技术的发展和智能化的进步,移动目标跟踪的应用越来越广泛。
移动目标跟踪的核心是找到目标并跟踪它,因而算法的优劣直接决定着跟踪结果的好坏。
在本文中,我们将探讨一些常见的移动目标跟踪算法,以及它们在实际应用中的情况。
第二部分:常见的移动目标跟踪算法1. 卡尔曼滤波器算法卡尔曼滤波器是一种线性滤波器,可以用来估计系统的状态。
在移动目标跟踪中,卡尔曼滤波器的应用主要是用来估计目标的轨迹和速度等状态参数。
卡尔曼滤波器算法具有简单、实用、鲁棒性强的特点,在很多应用中得到了广泛的应用。
2. 粒子滤波器算法粒子滤波器算法是一种非参数滤波器,与卡尔曼滤波器相比具有更好的适应性和精度。
在移动目标跟踪中,粒子滤波器算法用来估计目标的状态,可以有效地解决一些卡尔曼滤波器无法解决的问题,如非线性系统和非高斯噪声。
3. CAMShift算法CAMShift算法是一种基于颜色直方图的目标跟踪算法,它的核心思想是通过更新目标直方图的方式来实现目标跟踪。
CAMShift算法具有实时性好、可靠性高、鲁棒性强等特点,在很多应用场景中得到了广泛的应用。
第三部分:移动目标跟踪算法的应用1. 智能监控移动目标跟踪算法在智能监控领域有广泛的应用。
通过对监控视频中的移动目标进行跟踪,可以实现对物品的自动识别、实时监控、监控报警等功能,提高监控系统的安全性和智能化程度。
2. 交通管控移动目标跟踪算法在交通管控领域同样有着广泛的应用。
通过对交通视频中的车辆进行跟踪,可以实现对交通流量、拥堵等情况的实时统计,帮助交通部门进行交通治理,提高道路的通行效率和安全性。
3. 智能机器人移动目标跟踪算法在智能机器人领域也有很大的应用潜力。
通过对机器人视觉信息的处理,可以实现机器人的导航、目标抓取、环境识别等功能,为机器人的智能化发展打下基础。
第四部分:总结总的来说,移动目标跟踪算法是计算机视觉领域中的重要研究方向之一,也是实际应用中必不可少的一种算法。
目标跟踪方法

目标跟踪方法
以下是 8 条关于目标跟踪方法的内容:
1. 嘿!你知道利用标志物来跟踪目标吗?就像在茫茫人海中,你通过对方戴的一顶特别的帽子来锁定他一样。
比如说你在找你的小伙伴,你告诉他今天戴个红色帽子,那你一下子就能在人群中看到那顶鲜艳的红帽子,这不就找到他啦!
2. 咱可以通过电子设备来进行目标跟踪呀!这就好比有一双千里眼,能随时随地知道目标在哪里。
比如说你给宠物狗戴上定位项圈,不管它跑到哪儿,你都能通过手机找到它。
哇塞,是不是超方便?
3. 哎,注意观察目标的行动模式也是很重要的方法呢!就好像你熟悉了朋友走路的姿态,哪怕在远处看到那个熟悉的身影,你也知道是他。
比如说你了解同事总是迈大步走,那在远处看到这样走路的人,大概率就是他啦!
4. 目标跟踪还能通过气味来哦!这像不像跟着香味找美食呀?比如追踪一只带有特殊气味的小动物,就能顺着那股味道找到它的踪迹。
神奇吧?
5. 哈哈,建立联系来跟踪目标也不错哟!这如同放风筝,手里紧紧拽着线。
比如你和小伙伴约定好特定的暗号或联系方式,就能通过这个来掌握他的动向啦!
6. 嘿哟,专门安排人去跟踪目标也是办法呀!就像派个小侦探跟着,眼睛一刻也不离开。
比如说让一个人专门盯着重要物品,它去哪儿都能清楚知道。
7. 哇哦,通过分析目标的社交网络也能跟踪呢!这就好像顺着人脉网去找到要找的人。
比如说想知道某个老同学的下落,通过其他同学不就有线索啦?
8. 哎呀呀,利用摄像头监控来进行目标跟踪多厉害!就如同有无数双眼睛在同时盯着。
比如在商场里通过多个摄像头来锁定一个小偷的行动,让他无处可逃。
总之,目标跟踪的方法多种多样,我们要根据具体情况选择最适合的呀!。
《目标跟踪》课件

目标跟踪技术未来的应用前景
随着计算机视觉和人工智能的发展,目标跟踪技术将在智能交通、安防监控等领域实现更广 泛的应用。
引领目标跟踪技术发展的领军企业
一些技术领先的企业,如Google、Facebook、华为等,正致力于目标跟踪技术的研究和应 用。
1
物体检测
常用的物体检测算法包括直方图目标检测、基于区域的CNN物体检测等,用于 检测视频中的目标。
2
物体跟踪
基于相关滤波的目标跟踪算法和深度学习目标跟踪算法等,可以实时追踪目标的 位置和运动。
常见的物体检测及跟踪算法
1 直方图目标检测
通过对目标的颜色和纹理特征进行建模,实 现在视频中的准确检测与定位。
《目标跟踪》PPT课件
目标跟踪是一项重要的技术,该课件将介绍目标跟踪的定义、应用场景、技 术原理,以及常见的物体检测和跟踪算法,还会展望未来的发展趋势。
什么是目标跟踪
目标跟踪是指根据预定的目标,在视频中实时追踪并确定其位置和运动轨迹的踪的定义
目标跟踪是一种针对特定目 标进行的视觉分析技术,它 能从视频中识别、追踪并分 析目标的运动。
目标跟踪的应用场景
目标跟踪技术可以应用于视 频监控、智能交通、人机交 互、虚拟现实等领域,提供 更智能化、交互性更强的体 验。
目标跟踪的分类
目标跟踪可以分为单目标跟 踪和多目标跟踪两种类型, 根据需求选择适合的目标跟 踪算法。
目标跟踪的技术原理
目标跟踪技术基于物体检测和物体跟踪的原理。物体检测用于识别视频中的目标,而物体跟踪用 于追踪目标的位置和运动轨迹。
2 基于区域的CNN物体检测
目标追踪算法及其应用场景
目标追踪算法及其应用场景目标追踪算法是计算机视觉领域一项重要的研究方向,它的应用场景广泛。
本文将介绍目标追踪算法的概念、分类以及一些常见的应用场景。
目标追踪算法是指在给定视频或图像序列中,通过分析图像中的目标对象,持续追踪目标对象在不同时间段内的位置、运动轨迹以及其他相关属性的技术。
目标追踪算法广泛应用于视频监控、自动驾驶、虚拟现实和增强现实等领域。
目标追踪算法可以根据其处理方式和使用的特征分为多种类型。
其中,传统目标追踪算法主要使用颜色、形状和纹理等低级特征来进行目标追踪。
这些算法通常需要对目标的外观进行建模,并根据目标与背景之间的差异进行匹配。
然而,传统目标追踪算法在复杂背景下效果不佳,易受到光照变化、目标形变等因素的干扰。
随着深度学习的兴起,基于深度学习的目标追踪算法也日益受到关注。
这些算法利用卷积神经网络(CNN)等深度学习模型,从大量的标注数据中学习目标的外貌特征和运动特征。
相较于传统算法,基于深度学习的目标追踪算法具有更强的泛化能力和鲁棒性,可以应对复杂背景、遮挡、形变等问题。
目标追踪算法在视频监控领域具有广泛应用。
例如,在一个大型的监控视频中,追踪特定目标的位置和运动轨迹可以帮助安保人员快速定位异常行为并采取相应的措施。
此外,目标追踪算法还可以用于车辆、行人和动物等目标的行为分析,以及对违法行为的检测和预警。
自动驾驶是另一个重要的应用场景。
自动驾驶汽车需要实时准确地追踪周围的车辆、行人和障碍物,以便进行安全驾驶和路径规划。
目标追踪算法可以提供对周围环境的感知能力,帮助自动驾驶汽车及时做出决策并避免潜在的危险。
虚拟现实(VR)和增强现实(AR)技术也是目标追踪算法的重要应用领域。
在VR和AR应用中,用户可以通过佩戴设备来与虚拟或增强的世界进行交互。
目标追踪算法可以实时追踪用户的手势和头部运动,从而改变虚拟或增强现实场景中的视角和内容。
这种技术可以应用于游戏、教育、医疗等领域,提供更加沉浸式和交互式的用户体验。
目标跟踪算法在工业自动化中的应用研究
目标跟踪算法在工业自动化中的应用研究摘要:目标跟踪是工业自动化领域中的重要任务之一。
随着计算机视觉和机器学习的发展,各种目标跟踪算法被提出并成功应用于工业自动化中。
本文主要探讨了目标跟踪算法在工业自动化中的应用研究,包括目标检测、目标跟踪算法的分类以及相关的实际应用案例。
1. 引言工业自动化是现代工业生产的重要组成部分,目标跟踪作为工业自动化中的基础任务之一,可以用于实时监控、质量检测、装配线优化等。
目标跟踪的目的是在连续的图像序列中准确定位和追踪感兴趣的目标物体。
传统的目标跟踪方法往往依赖于手工设计的特征提取器,这些方法在复杂背景、光照变化等场景下往往效果不佳。
近年来,随着计算机视觉和机器学习的快速发展,目标跟踪算法不断涌现,并在工业自动化领域取得了广泛应用。
2. 目标检测目标检测是目标跟踪算法的前置任务,主要是确定图像中目标的位置和大小。
在工业自动化中,目标检测可以帮助自动化设备定位并准确跟踪目标物体。
目前常用的目标检测算法包括基于机器学习的方法和基于深度学习的方法。
基于机器学习的方法包括支持向量机(SVM)、随机森林(Random Forest)等,这些方法主要依赖于手工设计的特征提取器,并需要大量的训练样本。
而基于深度学习的方法,如卷积神经网络(CNN),可以自动学习图像中的特征并进行目标检测,由于其优秀的特征表达能力,已经在工业自动化中得到广泛应用。
3. 目标跟踪算法的分类目标跟踪算法根据不同的应用场景和需求可以分为多种类型。
常见的目标跟踪算法包括基于颜色特征的算法、基于纹理特征的算法、基于形状特征的算法等。
基于颜色特征的算法使用颜色信息进行目标跟踪,适用于目标物体颜色较为明显的场景。
基于纹理特征的算法利用目标物体的纹理信息进行跟踪,适用于目标物体具有较为明显纹理的场景。
基于形状特征的算法则利用目标物体的形状信息进行跟踪,适用于目标物体形状明显的场景。
此外,还有一些复合特征的目标跟踪算法,将颜色、纹理和形状等特征进行组合,以提高跟踪的准确性和鲁棒性。
目标检测与跟踪技术研究与应用
目标检测与跟踪技术研究与应用一、引言随着人工智能技术的快速发展,目标检测与跟踪技术已经成为了计算机视觉领域中最受关注的问题之一。
目标检测和识别是计算机视觉中最核心的问题之一,在自动驾驶、安防监控、智能家居等领域都有着广泛的应用。
而目标跟踪技术则是在目标检测的基础上进行的,旨在实现跨帧跟踪目标,以便于对目标的行为进行分析和预测。
二、基础理论目标检测是指在一张图像中找到并准确标注出所有感兴趣的物体,并将它们对应到一些预定的类别中。
通常情况下,目标检测处理的数据是一张图像,在预处理后得到一份高质量的、标注完整的数据集。
常见的目标检测算法有Haar特征分类器、SVM、神经网络等。
其中Haar特征分类器是一种基于卷积核的检测方法,利用一些基础的图像特征如区域灰度值差、图像中矩形框的顶点等关键点,对图像中不同部位的区域进行区分和分类,以实现目标检测。
目标跟踪则是建立在目标检测之上的。
其主要目标是跟踪目标,以便于对目标的行为进行分析和预测。
目标跟踪技术大致可以分为基于特征点的跟踪和基于模板的跟踪两类。
基于特征点的跟踪方法主要是在目标周围提取一些特殊的特征点,如角点、边缘等,并通过这些特征点对目标进行跟踪。
而基于模板的跟踪则是基于目标的图像模板,通过比较相邻两帧中目标的相似度进行跟踪。
三、目标检测与跟踪技术的应用1. 自动驾驶领域在自动驾驶领域中,目标检测和跟踪技术扮演着非常重要的角色。
基于目标检测和跟踪的自动驾驶系统可以实现对行人、车辆等多种交通工具的识别和跟踪,从而为车辆的自动导航、转向、加减速等提供可靠的依据。
例如,特斯拉等自动驾驶汽车厂商都采用了目标检测和跟踪技术,以实现自动驾驶功能。
2. 安防监控领域在安防监控领域中,目标检测和跟踪技术可以帮助保安人员准确地识别和跟踪目标,从而及时发现安全隐患并采取相应的措施。
目前市场上有很多基于目标检测和跟踪技术的智能安防监控系统,可以实现对固定区域内的人员、车辆等进行实时监控,警报出现异常情况。
计算机视觉中的目标跟踪技术及其使用技巧
计算机视觉中的目标跟踪技术及其使用技巧计算机视觉是一门研究如何使计算机能够处理和解释图像或视频的技术。
目标跟踪是计算机视觉领域中一个重要的研究方向,它旨在通过分析和理解图像或视频中的目标,实时地追踪目标的位置和轨迹。
目标跟踪技术在许多领域中得到广泛应用,如视频监控、自动驾驶、虚拟现实等。
目标跟踪技术可以分为在线目标跟踪和离线目标跟踪两种类型。
在线目标跟踪是指在连续的图像序列中实时地跟踪目标,即在每一时刻只利用当前帧的信息进行目标位置预测。
离线目标跟踪则是对整个视频序列进行跟踪分析,通过前后帧之间的相关性进行目标位置推断。
目标跟踪的核心问题是如何描述和表示目标。
常用的目标表示方法有边界框表示、轮廓表示和特征点表示。
边界框表示是最简单和常用的目标表示方法,它用一个矩形框来标记目标的位置。
轮廓表示则是通过识别目标边缘的形状来描述目标。
特征点表示是通过识别目标的关键点或特征点来描述目标。
不同的目标表示方法适用于不同的应用场景。
在目标跟踪技术中,常用的算法包括基于颜色模型的目标跟踪算法、基于形状模型的目标跟踪算法和基于深度学习的目标跟踪算法等。
基于颜色模型的目标跟踪算法是最简单和常用的方法之一,它通过分析目标区域的颜色分布来进行目标跟踪。
基于形状模型的目标跟踪算法则是利用目标形状的变化来进行目标跟踪。
基于深度学习的目标跟踪算法是近年来发展起来的一种新兴技术,通过神经网络的训练和学习来实现目标跟踪。
除了算法选择外,目标跟踪技术还需要考虑一些技巧和策略来提高跟踪效果。
首先,目标的选择和初始化是非常重要的一步。
良好的目标选择和初始化可以极大地提高跟踪的准确性和鲁棒性。
其次,目标模型的更新是保持跟踪效果的关键。
目标模型的更新可以通过匹配跟踪结果和真实目标来实现。
此外,多目标跟踪和目标遮挡是目标跟踪中常遇到的困难问题。
多目标跟踪的主要挑战是同时跟踪多个目标,并保持跟踪的准确性。
目标遮挡则是指目标在运动过程中被其他物体遮挡,这会导致目标跟踪失效。
目标跟踪实验
目标跟踪实验目标跟踪是计算机视觉中的一项重要技术,用于追踪视频中的目标物体。
在现实生活中,目标跟踪技术被广泛应用于监控、智能交通、无人驾驶等领域。
本实验旨在通过Python编程实现简单的目标跟踪算法,并对其性能进行评估。
首先,我们需要选择一段视频来进行目标跟踪实验。
可以选择一段包含动态目标物体的视频,例如运动的车辆或行人。
接下来,我们需要将视频载入到Python程序中进行处理。
在开始实验之前,我们需要安装一些必要的库,如OpenCV和NumPy。
OpenCV是一个流行的计算机视觉库,提供了丰富的视觉处理函数和工具。
NumPy是科学计算领域常用的库,提供了大量的数学函数和矩阵操作工具。
首先,我们需要读取视频并获取第一帧图像。
可以使用OpenCV提供的`VideoCapture`函数来读取视频,并使用`read`函数获取第一帧图像。
这里需要定义一个窗口来显示视频和目标跟踪结果。
接下来,我们可以选择使用鼠标来手动选择目标物体的初始位置。
我们可以定义一个鼠标事件的回调函数,当鼠标按下时记录当前的坐标。
定义一个布尔变量`select`来控制选择操作的进行。
然后,我们需要定义一个目标跟踪器。
在本实验中,我们选择使用MeanShift算法进行目标跟踪。
MeanShift算法是一种基于颜色直方图的目标跟踪算法,可以通过计算当前帧图像的直方图与初始帧图像的直方图的相似度来更新目标物体的位置。
在每一帧图像中,我们需要使用MeanShift算法来更新目标物体的位置。
首先,我们需要计算当前帧图像的直方图,并使用`cv2.calcHist`函数来计算直方图。
然后,我们需要使用`cv2.normalize`函数将直方图归一化。
接下来,我们可以使用`cv2.meanShift`函数来计算目标物体的新位置。
在目标物体的位置更新之后,我们可以将其绘制在当前帧图像上,并通过`cv2.imshow`函数显示目标跟踪结果。
然后,我们需要使用`cv2.waitKey`函数等待一段时间,以实现视频的播放效果。
机器视觉中的目标跟踪算法及应用
机器视觉中的目标跟踪算法及应用机器视觉领域中,目标跟踪是一个重要的研究方向。
它涉及到计算机视觉、图像处理、机器学习等多个领域。
目标跟踪算法可以应用于视频监控、自动驾驶、无人机、人机交互等多个场景。
本文将介绍机器视觉中的目标跟踪算法及其应用。
一、目标跟踪算法分类目标跟踪算法可以分为基于传统机器视觉方法和基于深度学习方法两大类。
1. 基于传统机器视觉方法的目标跟踪算法传统机器视觉方法的目标跟踪算法适用于一些简单的场景。
它们通常由以下几个部分组成:目标检测、目标描述和目标跟踪。
其中,目标检测用于在一幅图像中定位出目标的位置和大小,目标描述用于描述目标的特征,目标跟踪用于在后续帧中跟踪目标的位置和大小。
常用的传统机器视觉方法包括:基于颜色的目标跟踪、基于边缘的目标跟踪、基于特征点的目标跟踪等。
2. 基于深度学习方法的目标跟踪算法基于深度学习方法的目标跟踪算法通常基于卷积神经网络(CNN)或循环神经网络(RNN)。
这些算法通过学习目标的特征来实现目标跟踪。
其中,常用的算法包括:基于卷积神经网络的目标跟踪算法(如SiamFC、SiamRPN等)和基于循环神经网络的目标跟踪算法(如LSTM等)。
二、机器视觉中的目标跟踪应用目标跟踪算法可以应用于以下领域:1. 视频监控目标跟踪技术可以应用于视频监控领域,实现对目标的实时跟踪和定位。
这对于安保和犯罪预防有着重要的作用。
例如,在公共场所安装的监控摄像头可以应用目标跟踪技术,实时跟踪行人、车辆等目标,从而提高视频监控系统的效率和准确性。
2. 自动驾驶目标跟踪技术可以应用于自动驾驶系统中,实现对其他车辆、行人等目标的实时跟踪和预测。
当自动驾驶车辆接近其他目标时,它可以及时做出相应的决策,减少交通事故的发生。
3. 无人机目标跟踪技术可以应用于无人机领域,实现对特定目标的自动跟踪。
例如,对于农业无人机,它可以应用目标跟踪技术,实现对农田作物的自动监测和管理。
4. 人机交互目标跟踪技术可以应用于人机交互领域,实现对人体动作的实时跟踪。
计算机视觉中的目标跟踪技术应用

计算机视觉中的目标跟踪技术应用计算机视觉是一门人工智能领域中的重要分支,在如今的物联网时代具有极为广泛的应用前景。
计算机视觉技术的研究和发展,使得许多场景下的视觉问题得以解决。
目标跟踪技术作为计算机视觉中十分重要的一部分,可以用来跟踪视频中的物体运动轨迹,以及有效地从在物体运动过程中捕捉的图像序列中提取目标区域,从而对于实际生活中许多情境都是必不可少的。
目标跟踪技术分为基于颜色模型的跟踪和基于特征提取的跟踪,其中基于特征提取的跟踪又可分为特征区域跟踪和特征点跟踪。
下面将对这几种跟踪方式进行分析和应用。
基于颜色模型的跟踪是采用颜色分割来实现的,即通过对目标区域颜色分布特征的分析,来实现目标跟踪。
这种跟踪方式具有速度快、对光照变化不敏感等优点,但容易受到背景复杂、目标外观变化等影响,因此在实际应用中较少使用。
特征区域跟踪(Object Tracking by Detection, OTbD)和特征点跟踪(Object Tracking by Regression, OTbR)是目前比较常用的跟踪方式。
特征区域跟踪是通过检测器检测目标特征点的位置,计算出目标的矩形区域,接着,通过跟踪器来判断当前帧图像中目标的位置是否在这个矩形区域内,从而实现目标跟踪。
特征区域跟踪的优点在于跟踪速度快,且对于目标位置的确定具有较高的准确性。
但在目标大小变化、目标的形状变化较大、灰度变化等情况下,特征区域跟踪的准确性会大打折扣。
相对于特征区域跟踪,特征点跟踪更加具有优越性。
而特征点跟踪的定位方式则是首先通过某些技术,如感知机、神经网络等方法,来训练出具有代表性的特征点;然后,在跟踪过程中,通过对特征点的移动进行检测,即可完成目标跟踪。
这种方式在目标形变、颜色变化等情况下,仍可完成跟踪。
但它也存在一些固有的缺点,如易失效、鲁棒性较低等问题,对于表面材质的颜色变化灵敏,精度受噪声等因素影响,精确度也稍低些。
除此之外,综合应用的跟踪方式,可以用多个不同的特征来跟踪目标,如角点、灰度直方图和纹理等特征的结合使用,可在多种不确定因素的影响下,仍保持较高的正确率。
10 目标跟踪与应用实例2010
z x
东北大学信息学院人工智能与机器人研究所
x´
东北大学信息学院人工智能与机器人研究所
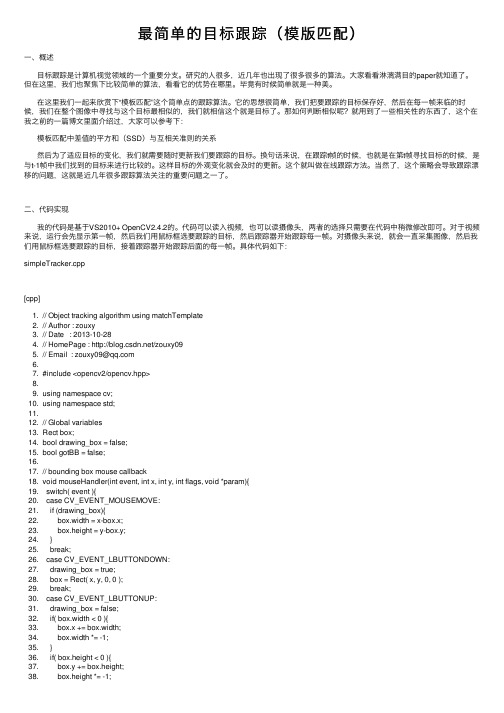
光流定义 运动场 • 运动场(或速度场)计算不一定要求两 帧的间隔时间非常小。目标可以被短时 遮挡,或与其他物体的图像重叠。 •
• 光流定义:亮度模式引起的表观运动 • 表观运动:图像上测得的辐照度的变化所体现 的运动,不完全与实际运动情况对应.称之为表 观运动.
东北大学信息学院人工智能与机器人研究所 东北大学信息学院人工智能与机器人研究所
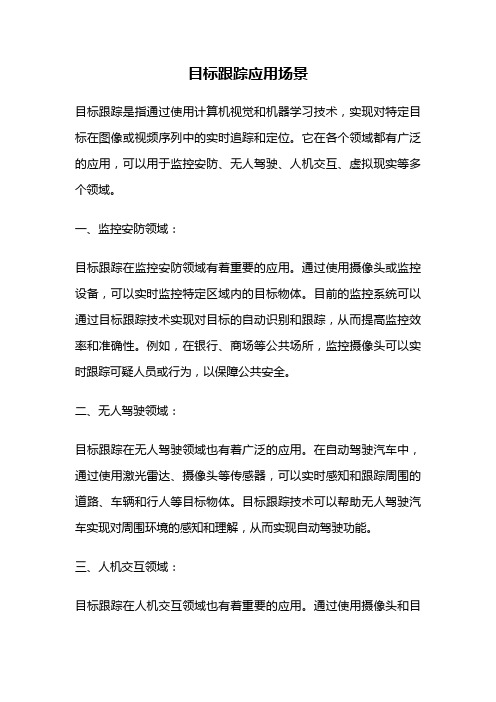
利用多帧差分图像提取目标的完整轮廓
+
-
3
从差动图像可以得到一些其他运动参数: 目标逼近或远离、多目标的交叉等。 差动分析方法给出运动分析的原理, 但是差动图像携带的信息不够,实际 工作会遇到问题。
如果可以得到一幅静态参考图像,背景也是 静止的,景物中任何运动都可以被准确地检 测出来。
—光流计算是基于两点假设:
* 被观察的目标点的亮度不随时间变化 * 图像中靠近的点以相同的方式运动
如果以上两点假设被破坏,光流计算将出现错误。
—实际上两点假设往往不成立,在明显的纹 理区域、围绕运动的边界等地方的光流变 化非常大。
t1
t2
光流
基于光流的图像分析是为了决定运动场,由于光照 变化的影响,光流并不总是对应真实的运动场。
东北大学信息学院人工智能与机器人研究所
跟踪算法的分类 • 基于运动分析的方法 • 基于区域的跟踪 • 基于特征的跟踪 • 基于变形模板跟踪 • 基于模型跟踪
东北大学信息学院人工智能与机器人研究所
基于相关的跟踪
视觉跟踪的难点
• 一个性能良好的跟踪系统必须准确、实时、可靠。 • 鲁棒性
– 鲁棒性是指视觉跟踪算法能够在各种环境条件下实现对 运动目标持续稳定的跟踪。 – 被跟踪运动目标的姿态改变, – 运动目标所处环境的光照变化 – 部分遮挡引起的运动目标不规则变形 – 全部遮挡引起的运动目标的暂时消失。
最简单的目标跟踪(模版匹配)
最简单的⽬标跟踪(模版匹配)⼀、概述⽬标跟踪是计算机视觉领域的⼀个重要分⽀。
研究的⼈很多,近⼏年也出现了很多很多的算法。
⼤家看看淋漓满⽬的paper就知道了。
但在这⾥,我们也聚焦下⽐较简单的算法,看看它的优势在哪⾥。
毕竟有时候简单就是⼀种美。
在这⾥我们⼀起来欣赏下“模板匹配”这个简单点的跟踪算法。
它的思想很简单,我们把要跟踪的⽬标保存好,然后在每⼀帧来临的时候,我们在整个图像中寻找与这个⽬标最相似的,我们就相信这个就是⽬标了。
那如何判断相似呢?就⽤到了⼀些相关性的东西了,这个在我之前的⼀篇博⽂⾥⾯介绍过,⼤家可以参考下:模板匹配中差值的平⽅和(SSD)与互相关准则的关系然后为了适应⽬标的变化,我们就需要随时更新我们要跟踪的⽬标。
换句话来说,在跟踪t帧的时候,也就是在第t帧寻找⽬标的时候,是与t-1帧中我们找到的⽬标来进⾏⽐较的。
这样⽬标的外观变化就会及时的更新。
这个就叫做在线跟踪⽅法。
当然了,这个策略会导致跟踪漂移的问题,这就是近⼏年很多跟踪算法关注的重要问题之⼀了。
⼆、代码实现我的代码是基于VS2010+ OpenCV2.4.2的。
代码可以读⼊视频,也可以读摄像头,两者的选择只需要在代码中稍微修改即可。
对于视频来说,运⾏会先显⽰第⼀帧,然后我们⽤⿏标框选要跟踪的⽬标,然后跟踪器开始跟踪每⼀帧。
对摄像头来说,就会⼀直采集图像,然后我们⽤⿏标框选要跟踪的⽬标,接着跟踪器开始跟踪后⾯的每⼀帧。
具体代码如下:simpleTracker.cpp[cpp]1. // Object tracking algorithm using matchTemplate2. // Author : zouxy3. // Date : 2013-10-284. // HomePage : /zouxy095. // Email : zouxy09@6.7. #include <opencv2/opencv.hpp>8.9. using namespace cv;10. using namespace std;11.12. // Global variables13. Rect box;14. bool drawing_box = false;15. bool gotBB = false;16.17. // bounding box mouse callback18. void mouseHandler(int event, int x, int y, int flags, void *param){19. switch( event ){20. case CV_EVENT_MOUSEMOVE:21. if (drawing_box){22. box.width = x-box.x;23. box.height = y-box.y;24. }25. break;26. case CV_EVENT_LBUTTONDOWN:27. drawing_box = true;28. box = Rect( x, y, 0, 0 );29. break;30. case CV_EVENT_LBUTTONUP:31. drawing_box = false;32. if( box.width < 0 ){33. box.x += box.width;34. box.width *= -1;35. }36. if( box.height < 0 ){37. box.y += box.height;38. box.height *= -1;40. gotBB = true;41. break;42. }43. }44.45.46. // tracker: get search patches around the last tracking box,47. // and find the most similar one48. void tracking(Mat frame, Mat &model, Rect &trackBox)49. {50. Mat gray;51. cvtColor(frame, gray, CV_RGB2GRAY);52.53. Rect searchWindow;54. searchWindow.width = trackBox.width * 3;55. searchWindow.height = trackBox.height * 3;56. searchWindow.x = trackBox.x + trackBox.width * 0.5 - searchWindow.width * 0.5;57. searchWindow.y = trackBox.y + trackBox.height * 0.5 - searchWindow.height * 0.5;58. searchWindow &= Rect(0, 0, frame.cols, frame.rows);59.60. Mat similarity;61. matchTemplate(gray(searchWindow), model, similarity, CV_TM_CCOEFF_NORMED);62.63. double mag_r;64. Point point;65. minMaxLoc(similarity, 0, &mag_r, 0, &point);66. trackBox.x = point.x + searchWindow.x;67. trackBox.y = point.y + searchWindow.y;68. model = gray(trackBox);69. }70.71. int main(int argc, char * argv[])72. {73. VideoCapture capture;74. capture.open("david.mpg");75. bool fromfile = true;76. //Init camera77. if (!capture.isOpened())78. {79. cout << "capture device failed to open!" << endl;80. return -1;81. }82. //Register mouse callback to draw the bounding box83. cvNamedWindow("Tracker", CV_WINDOW_AUTOSIZE);84. cvSetMouseCallback("Tracker", mouseHandler, NULL );85.86. Mat frame, model;87. capture >> frame;88. while(!gotBB)89. {90. if (!fromfile)91. capture >> frame;92.93. imshow("Tracker", frame);94. if (cvWaitKey(20) == 'q')95. return 1;96. }97. //Remove callback98. cvSetMouseCallback("Tracker", NULL, NULL );99.100. Mat gray;101. cvtColor(frame, gray, CV_RGB2GRAY);102. model = gray(box);103.104. int frameCount = 0;105.106. while (1)108. capture >> frame;109. if (frame.empty())110. return -1;111. double t = (double)cvGetTickCount();112. frameCount++;113.114. // tracking115. tracking(frame, model, box);116.117. // show118. stringstream buf;119. buf << frameCount;120. string num = buf.str();121. putText(frame, num, Point(20, 20), FONT_HERSHEY_SIMPLEX, 1, Scalar(0, 0, 255), 3);122. rectangle(frame, box, Scalar(0, 0, 255), 3);123. imshow("Tracker", frame);124.125.126. t = (double)cvGetTickCount() - t;127. cout << "cost time: " << t / ((double)cvGetTickFrequency()*1000.) << endl;128.129. if ( cvWaitKey(1) == 27 )130. break;131. }132.133. return 0;134. }三、结果我们对在⽬标跟踪领域⼀个benchmark的视频-david来测试下代码的效果。
目标跟踪应用场景
目标跟踪应用场景目标跟踪是指通过使用计算机视觉和机器学习技术,实现对特定目标在图像或视频序列中的实时追踪和定位。
它在各个领域都有广泛的应用,可以用于监控安防、无人驾驶、人机交互、虚拟现实等多个领域。
一、监控安防领域:目标跟踪在监控安防领域有着重要的应用。
通过使用摄像头或监控设备,可以实时监控特定区域内的目标物体。
目前的监控系统可以通过目标跟踪技术实现对目标的自动识别和跟踪,从而提高监控效率和准确性。
例如,在银行、商场等公共场所,监控摄像头可以实时跟踪可疑人员或行为,以保障公共安全。
二、无人驾驶领域:目标跟踪在无人驾驶领域也有着广泛的应用。
在自动驾驶汽车中,通过使用激光雷达、摄像头等传感器,可以实时感知和跟踪周围的道路、车辆和行人等目标物体。
目标跟踪技术可以帮助无人驾驶汽车实现对周围环境的感知和理解,从而实现自动驾驶功能。
三、人机交互领域:目标跟踪在人机交互领域也有着重要的应用。
通过使用摄像头和目标跟踪技术,可以实现对人体动作和手势的实时跟踪和识别。
这样可以使人机交互更加自然和智能化,例如在虚拟现实游戏中,可以通过目标跟踪技术实时捕捉玩家的动作和表情,实现更加沉浸式的游戏体验。
四、虚拟现实领域:目标跟踪在虚拟现实领域也有着广泛的应用。
通过使用虚拟现实头盔和摄像头,可以实时跟踪用户的头部和手部动作,从而实现虚拟现实场景的交互和控制。
例如,在虚拟现实交互游戏中,可以通过目标跟踪技术实时捕捉用户的头部和手部动作,实现对游戏角色和物体的控制和操作。
总结:目标跟踪技术在监控安防、无人驾驶、人机交互、虚拟现实等多个领域都有着广泛的应用。
通过使用计算机视觉和机器学习技术,可以实现对特定目标在图像或视频序列中的实时追踪和定位。
目标跟踪技术的应用能够提高工作效率,提升安全性和用户体验。
未来随着技术的进一步发展,目标跟踪技术将在更多领域得到应用,并为人们的生活带来更多的便利和创新。
目标跟踪计数案例
目标跟踪计数案例目标跟踪计数是指通过计算机视觉技术实现对视频或图像中目标的自动识别、跟踪和计数的过程。
这项技术在交通监控、人流统计、图像分析等领域具有广泛的应用。
下面列举了一些与目标跟踪计数相关的案例。
1. 交通监控:在城市的交通监控系统中,通过目标跟踪计数可以实时统计道路上的车辆数量,对交通拥堵情况进行监测和分析。
通过分析车辆的流量和速度,可以提供交通管理部门决策的依据,如调整信号灯配时、优化道路规划等。
2. 人流统计:在商场、展览馆等场所,通过目标跟踪计数可以实时统计人流量,分析人员活动规律,为商家提供更好的经营策略。
例如,可以根据人流密集程度调整人员安排、优化商品陈列、改进营销策略等。
3. 安防监控:在安防监控领域,目标跟踪计数可以辅助监控人员对可疑人员或物体进行追踪和记录。
通过对目标的跟踪和计数,可以及时发现异常行为,提高安全性。
4. 动态人脸识别:在人脸识别技术中,目标跟踪计数可以用于识别和计数人群中的个体。
通过对人脸进行跟踪和计数,可以实现人员出入记录、人员布控等功能。
例如,在机场、火车站等公共场所,可以通过目标跟踪计数系统对人脸进行识别和计数,提高安全管理水平。
5. 动物行为研究:在动物行为研究领域,目标跟踪计数可以用于对动物的行为轨迹进行跟踪和计数。
通过分析动物的行为习惯和活动范围,可以揭示动物生态学、行为学等方面的规律。
6. 垃圾分类:在垃圾分类领域,目标跟踪计数可以用于自动识别和计数不同类别的垃圾。
通过对垃圾的跟踪和计数,可以提高垃圾分类的效率和准确性,实现资源的有效利用和环境保护。
7. 农业无人机:在农业领域,目标跟踪计数可以应用于农作物的生长监测和病虫害的识别。
通过对农田中的农作物进行跟踪和计数,可以实时了解农作物的生长状态,及时发现和处理病虫害问题,提高农作物的产量和质量。
8. 物料管理:在生产线上,目标跟踪计数可以用于物料的管理和追踪。
通过对物料的跟踪和计数,可以实时掌握物料的流向和数量,提高生产线的效率和管理水平。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
—光流计算是基于两点假设:
* 被观察的目标点的亮度不随时间变化 * 图像中靠近的点以相同的方式运动
如果以上两点假设被破坏,光流计算将出现错误。
—实际上两点假设往往不成立,在明显的纹 理区域、围绕运动的边界等地方的光流变 化非常大。
t1
t2
光流
基于光流的图像分析是为了决定运动场,由于光照 变化的影响,光流并不总是对应真实的运动场。
东北大学信息学院人工智能与机器人研究所
基于运动分析的跟踪
• 基于差分的方法
– 基于差分的方法比较直观实用,对光照的变化干扰不敏感, 但是对目标的检测不准确,对于缓慢运动的目标甚至可能无 法提取出目标边界,对于快速运动的目标提取出的目标区域 又过大。
10.3 运动目标跟踪技术
问题是往往得不到理想的静态参考图像。
最终 位置 目标 部分 边界
只能检测两边
东北大学信息学院人工智能与机器人研究所
狭缝问题
东北大学信息学院人工智能与机器人研究所
改进方法: • 比较两帧目标区域的灰度特性可以提高 运动参数估计的鲁棒性。 • 把图像的空间和时间梯度相结合,差 动分析能可靠地检测慢速运动的边缘和 高速运动的弱边缘。 运动边缘图像 dmed(i,j) = S(i,j)D(i,j) S(i,j)代表边缘的幅度,D(i,j)是完全的差 分图像
内容纲要
东北大学自动化专业本科课程
• 10.1运动分析方法
– 运动场与光流
第十章 目标跟踪与应用实例
魏颖 林明秀 人工智能与机器人研究所
东北大学信息学院人工智能与机器人研究所
– 差动分析法 – 基于特征点对应的分析法
• 10.2运动目标跟踪
– 目标跟踪基本原理 – 基于相关的运动目标跟踪 – 基于模型的运动目标跟踪
东北大学信息学院人工智能与机器人研究所 东北大学信息学院人工智能与机器人研究所
5
分析运动特征的三个有关问题: • 运动检测(记录下任何的运动) • 运动目标检测和定位(目标分割、特征匹配) • 从一组按时间序列采集的2维投影导出3维目 标的特性。
— 运动检测 记录任何探测到的运动,常用一个摄像机 — 运动目标检测和定位 摄像机静止,目标运动; 或摄像机运动,目标静止。 更复杂的运动目标的检测和运动轨迹的检测,预测。
10.2 运动目标跟踪技术
• 运动目标跟踪概述 • 基于运动分析的跟踪 • 基于相关的运动目标跟踪 • 基于模型的运动目标跟踪
东北大学信息学院人工智能与机器人研究所
• 准确性
– 运动目标检测的准确性,降低虚警率和漏警率 – 运动目标分割的准确性,通用分割算法
• 快速性
– 精度与速度之间的折中,快速算法和硬件实现提高速度。
fx、fy 、ft 表示图像 f(x,y,t)的偏微分。 如果dx、dy、dt非常小, O(δ2)可以忽略
光流约束方程 -ft = grad(f(x,y) )c fxu +fy v = -ft
光流约束方程,,对于u,v 两个未知数只有一个约束,不能唯一确 定光流。 求解光流必须加入其它约束条件。
近似为: fxdx+fydy+ftdt = 0 则,fx(dx/ dt) +fy ( dy/ dt) = -ft
东北大学信息学院人工智能与机器人研究所
东北大学信息学院人工智能与机器人研究所
2
光流用于运动分析
10.1 运动分析方法
• 运动场与光流 • 差动分析法 • 基于特征点对应的分析法
光流分析法要求图像的采样间隔非常短。
东北大学信息学院人工智能与机器人研究所 东北大学信息学院人工智能与机器人研究所
差动分析方法
– 智能交通:
• 交通流量的监控、车辆异常行为检测、行人行为判定,智能车辆等。
• 三维重构:
– 三维的识别和跟踪可以克服运动目标姿态变化导致的跟踪稳定 性差的问题。
– 军事:
• 战场环境更复杂苛刻,要求更强的适应性和对快速目标的稳定可靠跟 踪; • 在靶场内探测、捕获试验中的飞机、导弹等目标并跟踪测量它们的轨 迹和姿态; • 各种高技术武器系统的模拟训练器中对模拟目标的跟踪测量等等。 东北大学信息学院人工智能与机器人研究所
东北大学信息学院人工智能与机器人研究所
光流用于运动分析 光流计算方法 • 从不同角度出发引入不同的约束,产生 了不同的光流求解方法。 • 典型方法有:
– 基于梯度的方法 – 基于区域匹配的方法 – 频率域的方法
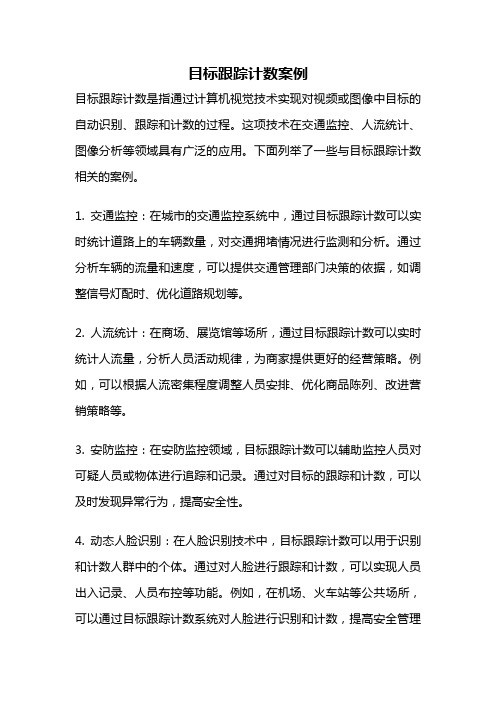
平移运动 速度平行 远近变化 缩涨同心 平面旋转 同心转动 垂直旋转 分组反向
光流可用于研究各种运动:
一均匀球绕其轴旋转,所得运 动场不为零,光流场为零. 东北大学信息学院人工智能与机器人研究所
一静止均匀球因光源的变化 光流场不为零.
东北大学信息学院人工智能与机器人研究所
1
光流分析方法
—研究光流场的目的就是为了 从序列图像中近似计算不能直接得到的运动场。 —光流反映了微小时间间隔内由于运动引起的图像变化。 —光流场是个速度场,它代表反映到二维图像平面上的 目标每一点的三维运动。
K=1
n
ak给出各帧图像的权重,当前帧的重要性最大。
东北大学信息学院人工智能与机器人研究所
运动目标的检出
• • 提取出运动目标首先要将图像分 成运动区域和不变的区域。 同一个场景的两幅画面进行比较:相减或差分 两帧比较结果只能抽取物体的一部分。 A • • 若能判断物体比背景亮(或暗)就 可以判断出目标运动的方向。 相邻帧目标移动的距离表示目标 运动的速度。 + v
跟踪பைடு நூலகம்口的大小≥最大速度园
最大速度圆
跟踪窗口 Cmax dt
2) 小加速度
目标在dt时间内,近似作直线均速运动。
东北大学信息学院人工智能与机器人研究所
东北大学信息学院人工智能与机器人研究所
3) 共同运动
所有的点以相同的方式运动
运动图像分析的基本方法
• 只分析图像中有变化的部分,有效地节省 计算量。 • 除了灰度、结构等信息外,可利用运动向 量的一致性进行区域分割。 • 利用前一幅画面的处理结果,提高当前画 面的处理效率。 • 根据前后画面的处理结果来推理、分析, 解释模糊不清的部分
u
图像中同一点 在t 和t+dt时刻 的灰度差
v
光流c=(u,v)
grad(f(x,y) )
v
-ft = grad(f(x,y) )c
2D图像灰 度梯度 相对运动 的速度
约束直线
基本光流约束方程: 灰度对时间的变化 率等于灰度的空间 梯度与光流速度的 点积。 u
东北大学信息学院人工智能与机器人研究所
东北大学信息学院人工智能与机器人研究所
4)相互对应
当前帧目标的每个点严格对应下一帧里的一个点, 反过来也是一样。 (目标被遮挡或发生旋转是例外)
东北大学信息学院人工智能与机器人研究所
6
视觉跟踪问题分类 • 摄像机数目:单目vs多目 • 摄像机是否运动:静止vs运动 • 场景中运动目标的数目:单目标vs多目标 • 场景中运动目标的类型:刚体vs非刚体 • 传感器种类:可见光图像VS 红外图像
东北大学信息学院人工智能与机器人研究所
跟踪算法的分类 • 基于运动分析的方法 • 基于区域的跟踪 • 基于特征的跟踪 • 基于变形模板跟踪 • 基于模型跟踪
东北大学信息学院人工智能与机器人研究所
基于相关的跟踪
视觉跟踪的难点
• 一个性能良好的跟踪系统必须准确、实时、可靠。 • 鲁棒性
– 鲁棒性是指视觉跟踪算法能够在各种环境条件下实现对 运动目标持续稳定的跟踪。 – 被跟踪运动目标的姿态改变, – 运动目标所处环境的光照变化 – 部分遮挡引起的运动目标不规则变形 – 全部遮挡引起的运动目标的暂时消失。
• 其它:
– 人体跟踪、表情识别、图像检索、图像查询
东北大学信息学院人工智能与机器人研究所
跟踪技术的基本原理
跟踪技术就是在连续图像序列中确定同一目标,并 测得目标的运动参数。核心内容是分析目标的运动 特征。 图像序列是一张张静止图像按照时间序列 组成的。但是用处理静止图像的方法不能 解决运动图像的解析问题: 分析图像的运动特征要用图像序列, 函数 f(x,y,t) 。 先验知识帮助降低运动图像分析的复杂性: * 摄像机的运动 * 图像采样间隔(场频)
z x
东北大学信息学院人工智能与机器人研究所
x´
东北大学信息学院人工智能与机器人研究所
光流定义 运动场 • 运动场(或速度场)计算不一定要求两 帧的间隔时间非常小。目标可以被短时 遮挡,或与其他物体的图像重叠。 •
• 光流定义:亮度模式引起的表观运动 • 表观运动:图像上测得的辐照度的变化所体现 的运动,不完全与实际运动情况对应.称之为表 观运动.
东北大学信息学院人工智能与机器人研究所
东北大学自动化专业本科课程
10.2 运动目标跟踪技术
————视觉跟踪visual tracking
东北大学信息学院人工智能与机器人研究所
4
跟踪的概念 • 运动目标跟踪概述 • 基于运动分析的跟踪 • 基于相关的运动目标跟踪 • 基于模型的运动目标跟踪 • 由于环境的动态变化,视频图像序列前一帧和后
东北大学信息学院人工智能与机器人研究所 东北大学信息学院人工智能与机器人研究所
利用多帧差分图像提取目标的完整轮廓
+
-
3
从差动图像可以得到一些其他运动参数: 目标逼近或远离、多目标的交叉等。 差动分析方法给出运动分析的原理, 但是差动图像携带的信息不够,实际 工作会遇到问题。
如果可以得到一幅静态参考图像,背景也是 静止的,景物中任何运动都可以被准确地检 测出来。
东北大学信息学院人工智能与机器人研究所
—光流分析不能给出运动轨迹;而是检测出更 普遍的运动特性,大大增加了复杂运动分析 的可靠性。