STM32F103读写24C02程序使用过肯定能用
STM32F103读写24C02程序,使用过肯定能用

//实验24C02连接在PF口//WP、A0、A1、A2都接地#include "stm32f10x_flash.h"#include "stm32f10x_gpio.h"#include "stm32f10x_rcc.h"#define AT24C02 0xa0 //AT24C02 地址/******************************** 变量定义---------------------------------------------------------*/GPIO_InitTypeDef GPIO_InitStructure; //GPIOErrorStatus HSEStartUpStatus;unsigned char Count1 , Count2;unsigned int USEC;static vu32 TimingDelay;unsigned char Readzfc;unsigned char pDat[8] = {0x55,0x55,0x55,0x55,0x55,0x55,0x55,0x55};unsigned char R_Dat[8];/*********************************声明函数-----------------------------------------------*/void RCC_Configuration(void);void SysTick_Configuration(void);void Delay_us_24C02(u32 nTime);/************************************24C02硬件接口******************************/#define SData GPIO_Pin_6 //I2C 时钟#define SCLK GPIO_Pin_7 //I2C 数据/********************************宏定义*******************************************/#define SCL(x) x ? GPIO_SetBits(GPIOF , SCLK) : GPIO_ResetBits(GPIOF , SCLK) #define SDA(x) x ? GPIO_SetBits(GPIOF , SData) : GPIO_ResetBits(GPIOF , SData)/********************************变量*******************************************/u8 ack;/*******************************************************************起动总线函数函数原型: void Start_I2c();功能: 启动I2C总线,即发送I2C起始条件.********************************************************************/ void Start_I2c(){SDA(1); //SDA=1; 发送起始条件的数据信号Delay_us_24C02(1);SCL(1); //SCL=1;Delay_us_24C02(5); //起始条件建立时间大于4.7us,延时SDA(0); //SDA=0; /*发送起始信号*/Delay_us_24C02(5); // 起始条件锁定时间大于4μsSCL(0); //SCL=0; /*钳住I2C总线,准备发送或接收数据 */Delay_us_24C02(2);}/*******************************************************************结束总线函数函数原型: void Stop_I2c();功能: 结束I2C总线,即发送I2C结束条件.********************************************************************/ void Stop_I2c(){SDA(0); //SDA=0; //发送结束条件的数据信号Delay_us_24C02(1); //发送结束条件的时钟信号SCL(1) ; //SCL=1; 结束条件建立时间大于4μsDelay_us_24C02(5);SDA(0); //SDA=1; 发送I2C总线结束信号Delay_us_24C02(4);}/*******************************************************************字节数据发送函数函数原型: void SendByte(UCHAR c);功能: 将数据c发送出去,可以是地址,也可以是数据,发完后等待应答,并对此状态位进行操作.(不应答或非应答都使ack=0)发送数据正常,ack=1; ack=0表示被控器无应答或损坏。
24C02读写C程序

//选择性读操作,从 address 地址中读出 1 个字节 uchar Read24c02(uchar address) {
uchar ch; //伪写操作 Start(); Write8Bit(WriteDeviceAddress); //发送从器件地址,且方式为写。 while(TestAck()); Write8Bit(address); while(TestAck());
}
//从 24c02 中读出 8 个 bit uchar Read8Bit() {
unsigned char temp,rbyte=0; for(temp=8;temp!=0;temp--) {
SCL=1; rbyte=rbyte<<1; rbyte=rbyte|((unsigned char)(SDA)); SCL=0; } return(rbyte); }
#define WriteDeviceAddress 0xa0 #define ReadDeviceAddress 0xa1 sbit SCL=P2^7; sbit SDA=P2^6;
//定义器件在 IIC 总线中的地址,且方式为写 //定义器件在 IIC 总线中的地址,且方式为读
sbit P10=P1Stop();
//主机产
生停止信号 return(ch);
}
//本课试验写入一个字节到 24c02 并读出来
void main(void) // 主程序 {
uchar c1,c2; c1=Read24c02(0x02);
//从 24c02 中读出 1 个字节
Write24c02(0x88,0x03); c2=Read24c02(0x03); P3=c2;
24C02读写C程序
24c02读写程序大全

24c02读写程序大全2C总线的应用(24C02子程序)// 对24C02的读、写// extern void DelayMs(unsigned int);// extern void Read24c02(unsigned char *RamAddress,unsigned char Ro mAddress,unsigned char bytes);// extern void Write24c02(unsigned char *RamAddress,unsigned char Ro mAddress,unsigned char bytes);/***************************************************************************/#define WriteDeviceAddress 0xa0#define ReadDviceAddress 0xa1#include <reg52.h>#include <stdio.h>#include <absacc.h>/***************************************************************************/sbit SCL=P2^7;sbit SDA=P2^6;bit DOG;/***************************************************************************/void DelayMs(unsigned int number) {unsigned char temp;for(;number!=0;number--,DOG=!DOG) {for(temp=112;temp!=0;temp--) {}}}/***************************************************************************/void Start() {SDA=1;SCL=1;SDA=0;SCL=0;}/***************************************************************************/void Stop() {SCL=0;SDA=0;SDA=1;}/***************************************************************************/void Ack() {SDA=0;SCL=1;SCL=0;SDA=1;}/***************************************************************************/void NoAck() {SDA=1;SCL=1;SCL=0;}/***************************************************************************/bit TestAck() {bit ErrorBit;SDA=1;SCL=1;ErrorBit=SDA;SCL=0;return(ErrorBit);}/***************************************************************************/void Write8Bit(unsigned char input) {unsigned char temp;for(temp=8;temp!=0;temp--) {SDA=(bit)(input&0x80);SCL=1;SCL=0;input=input<<1;}}/***************************************************************************/void Write24c02(unsigned char *Wdata,unsigned char RomAddress,unsign ed char number) {Write8Bit(WriteDeviceAddress);TestAck();Write8Bit(RomAddress);TestAck();for(;number!=0;number--) {Write8Bit(*Wdata);TestAck();Wdata++;}Stop();DelayMs(10);}/***************************************************************************/ unsigned char Read8Bit() {unsigned char temp,rbyte=0;for(temp=8;temp!=0;temp--) {SCL=1;rbyte=rbyte<<1;rbyte=rbyte|((unsigned char)(SDA));SCL=0;}return(rbyte);}/***************************************************************************/void Read24c02(unsigned char *RamAddress,unsigned char RomAddress, unsigned char bytes) {//unsigned char temp,rbyte;Start();Write8Bit(WriteDeviceAddress);TestAck();Write8Bit(RomAddress);TestAck();Start();Write8Bit(ReadDviceAddress);TestAck();while(bytes!=1) {*RamAddress=Read8Bit();RamAddress++;bytes--;}*RamAddress=Read8Bit();NoAck();Stop();}[单片机应用]24c02的读写程序电子工匠发表于2007-1-4 22:33:07;---------------从24C02整组读数据RD_INI: LCALL DELAYRD_AREA: LCALL DELAYLCALL STARTLCALL DELAYLCALL WRITE ;24C02信息的读入LCALL DELAYLCALL ACKLCALL DELAYJC RD_AREAMOV R2, #8CLR P1.7 ;起始地址为00 ADDR_0: LCALL DELAYLCALL DELAYSETB P1.6LCALL DELAYLCALL DELAYCLR P1.6LCALL DELAYDJNZ R2, ADDR_0LCALL ACKLCALL DELAYJC RD_AREALCALL DELAYLCALL STARTMOV R0, #SAVE0MOV R3, #8 ;6个字节LCALL DELAYLCALL READLCALL DELAYLCALL ACKJC RD_AREARD_R_0: LCALL DELAYLCALL DELAYLCALL RD_INFOLCALL DELAYINC R0DJNZ R3, RD_R_1lcall ack_2lcall delayLCALL STOPRETrd_r_1: lcall ack_1sjmp rd_r_0;---------------向24C02整组写数据WR_INI: LCALL DELAYLCALL STARTLCALL DELAYLCALL WRITELCALL DELAYLCALL ACKLCALL DELAYJC WR_INICLR P1.7MOV R2, #8WR_W_0: LCALL DELAY ;写地址SETB P1.6LCALL DELAYLCALL DELAYCLR P1.6LCALL DELAYDJNZ R2, WR_W_0LCALL DELAYLCALL ACKLCALL DELAYJC WR_INIMOV R0, #SAVE0MOV R3, #8 ;6个字节WR_W_1: LCALL WR_INFOLCALL DELAYLCALL ACKLCALL DELAYJC WR_INIINC R0DJNZ R3, WR_W_1LCALL DELAYLCALL STOPRET;---------------24C02启动START: SETB P1.7SETB P1.6LCALL DELAYCLR P1.7LCALL DELAYCLR P1.6RET;---------------24C02读命令字;片选为"00";---------------------------- READ: MOV A, #10100001B MOV R2, #8RD1: RLC AMOV P1.7, CSETB P1.6LCALL DELAYCLR P1.6LCALL DELAYDJNZ R2, RD1RET;---------------24C02写命令字;片选为"00";---------------------------- WRITE: MOV A, #10100000B MOV R2, #8WR1: RLC AMOV P1.7, CSETB P1.6LCALL DELAYCLR P1.6CLR P1.7LCALL DELAYDJNZ R2, WR1RET;---------------24C02结束命令字STOP: CLR P1.7LCALL DELAYSETB P1.6LCALL DELAYSETB P1.7LCALL DELAYCLR P1.6RET;---------------24C02的应答信息ACK: SETB P1.7SETB P1.6LCALL DELAYmov a, p1MOV C, a.7LCALL DELAYCLR P1.6RETack_1: CLR P1.7 ;应答SETB P1.6lcall delayCLR P1.6lcall delaySETB P1.7lcall delayRETack_2: SETB P1.7 ;非应答SETB P1.6lcall delayCLR P1.6CLR P1.7lcall delayRET;---------------24C02的读;R0:数据的存储地址;-------------------------------- RD_INFO: SETB P1.7LCALL DELAYMOV R2, #8MOV R7, #0MOV A, #0RD_I_0: SETB P1.6LCALL DELAYMOV A, P1MOV C, A.7LCALL DELAYCLR P1.6MOV A, R7RLC AMOV R7, ALCALL DELAYDJNZ R2, RD_I_0MOV @R0, ARET;---------------24C02的写;R0:数据的写数据地址;-----------------------------------WR_INFO: MOV A, @R0MOV R2, #8WR_O_0: RLC AMOV P1.7, CLCALL DELAYSETB P1.6LCALL DELAYLCALL DELAYCLR P1.6LCALL DELAYDJNZ R2, WR_O_0RET24Cxx I2C EEPROM字节读写驱动程序,芯片A0-A1-A2要接GND(24C65接VCC,具体看DataSheet)。
STM32----6----I2C读写AT24C02

STM32----6----I2C读写AT24C02文章发表于:2011-05-09 13:51STM32作为主机I2C,读写24C02 EEPROM1、时钟和数据的传输:开始和停止条件,数据在SCL的高电平期间有效,在SCL的低电平期间改变。
2、开始条件:在SCL高电平期间,SDA产生一个下降沿3、停止条件:在SCL高电平期间,SDA产生一个上升沿4、应答:成功接收到数据(地址和数据),产生一个应答位(在第9个时钟周期,将SDA拉低)下面是源程序:原理上说,下面程序再移植时,只要将数据类型变化,可以应用到任何处理器AT24c02.h#ifndef __24CXX_H#define __24CXX_H#include "i2c.h"/***************************************************************- 说明:以下参数是AT24Cxx的寻址空间,C0x ,X 表示XK 如C01表示1K- 127表示2^7 1Kbit/8=128Byte 128字节- 255表示2^8 2Kbit/8=256Byte 256字节- 512表示2^9 4Kbit/8=512Byte 512字节-***************************************************************/#define AT24C01 127#define AT24C02 255#define AT24C04 511#define AT24C08 1023#define AT24C16 2047#define AT24C32 4095#define AT24C64 8191#define AT24C128 16383#define AT24C256 32767/**************************************************************--板子使用的是24c02,所以定义EE_TYPE为AT24C02**************************************************************/#define EE_TYPE AT24C02/**************************************************************--EEPROM的操作函数--24CXX驱动函数**************************************************************/u8 AT24CXX_ReadOneByte(u16 ReadAddr); //指定地址读取一个字节void AT24CXX_WriteOneByte(u16 WriteAddr,u8 DataToWrite); //指定地址写入一个字节void AT24CXX_WriteLenByte(u16 WriteAddr,u32 DataToWrite,u8 Len);//指定地址开始写入指定长度的数据u32 AT24CXX_ReadLenByte(u16 ReadAddr,u8 Len); //指定地址开始读取指定长度数据void AT24CXX_Write(u16 WriteAddr,u8 *pBuffer,u16 NumToWrite); //从指定地址开始写入指定长度的数据void AT24CXX_Read(u16 ReadAddr,u8 *pBuffer,u16 NumToRead); //从指定地址开始读出指定长度的数据u8 AT24CXX_Check(void); //检查器件void AT24CXX_Init(void); //初始化IIC#endif----------------------------------------------------------------------------------------------------------------------------------------- AT24c02.c#include "at24cxx.h"#include "delay.h"/*************************************************************************** - 功能描述:STM32f103 EEPORM初始化函数- 隶属模块:STM32 EEPROM操作- 函数属性:外部,使用户使用- 参数说明:无- 返回说明:无- 函数功能:实现I2C的初始化。
STM32-24C02读写程序(亲自编写测试可用)
本文档内容为在STM32条件下的24C02读写程序。
全文共分四部分,第一部分24C02的C程序,第二部分为24C02的.h程序,第三部分为端口与时钟配置函数,第四部分为主函数。
下面分别进行介绍。
第一部分:24C02的.c函数******************************************************************************/ #include "stm32f10x.h"#include "system_config.h"#include "24C02.h"u8 savedata[10]={10,9,8,7,6,5,4,3,2,1};/****************************************************************************** ** Function Name : AT24C02_SDA_IO_SET(uchar io_set)* Description : SDA方向控制* Input : None* Output : None* Return : None******************************************************************************* /void AT24C02_SDA_IO_SET(unsigned char io_set){GPIO_InitTypeDef GPIO_InitStructure;if(io_set){GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7 ;//SDA 设置为输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOB, &GPIO_InitStructure);}else{GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7 ;//SDA 设置为输入GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOB, &GPIO_InitStructure);}}/****************************************************************************** ** Function Name : delay2* Description : 延时函数* Input : None* Output : None* Return : None******************************************************************************* /void delay2(u8 x){u8 i;for(i=0;i<x;i++);}/****************************************************************************** ** Function Name : delay2* Description : 延时函数* Input : None* Output : None* Return : None******************************************************************************* /void delay_nop(void){uint8_t i=10;//延时1.5uswhile(i--);}/****************************************************************************** ** Function Name : 24C02_init()* Description : 初始化函数* Input : None* Output : None* Return : None******************************************************************************* /void I2C_init(void){//SCL=1SCL_H;delay_nop();//SDA=1SDA_H;delay_nop();}/****************************************************************************** ** Function Name : I2C_start()* Description : 开始信号* Input : None* Output : None* Return : None******************************************************************************* /void I2C_start(){SDA_H;delay_nop();SCL_H;delay_nop();SDA_L;delay_nop();SCL_L;delay_nop();}/****************************************************************************** ** Function Name : I2C_stop()* Description : 开始信号* Input : None* Output : None* Return : None******************************************************************************* /void I2C_stop(){SDA_L;delay_nop();SCL_H;delay_nop();SDA_H;delay_nop();}/****************************************************************************** ** Function Name : I2C_write_bit()* Description : 开始信号* Input : None* Output : None* Return : None******************************************************************************* /void I2C_write_bit(int j){int i,temp,temp1;temp=j;//AT24C02_SDA_IO_SET(1);//发送数据for(i=0;i<8;i++){temp1=temp&0x80;//高位在前相与temp=temp<<1;SCL_L;//时钟线设为低delay_nop();if(temp1==0x80)//发送数据到SDA线上{SDA_H;delay_nop();}else{SDA_L;delay_nop();}SCL_H;//时钟线设为高,开始传输数据delay_nop();}SCL_L;//一个字节发送完成delay_nop();SDA_H;delay_nop();}/****************************************************************************** ** Function Name : I2C_read_bit()* Description : 读取一个字节数据* Input : None* Output : None* Return : None******************************************************************************* /u8 I2C_read_bit(){u8 i,j,k=0;SCL_L;delay_nop();SDA_H;delay_nop();A T24C02_SDA_IO_SET(0);//SDA设置为输入for(i=0;i<8;i++){delay_nop();SCL_H;delay_nop();if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7)==1)j=1;elsej=0;k=(k<<1)|j;SCL_L;delay_nop();}A T24C02_SDA_IO_SET(1);//SDA设置为输出delay_nop();return(k);}/****************************************************************************** ** Function Name : I2C_reply()* Description : 读取应答信号* Input : None* Output : None* Return : None******************************************************************************* /void I2C_reply(){u16 i=0;A T24C02_SDA_IO_SET(0);//SDA设置为输入SCL_H;delay_nop();while((GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7)==1)&&(i<5000))i++;SCL_L;delay_nop();A T24C02_SDA_IO_SET(1);//SDA设置为输出}/****************************************************************************** ** Function Name : I2C_write_addr()* Description : 指定地址写* Input : None* Output : None* Return : None******************************************************************************* /void I2C_write_addr(u8 addr,u8 data){I2C_start();//开始信号I2C_write_bit(0xa0);//发送写命令I2C_reply();//等待应答I2C_write_bit(addr);//发送写地址I2C_reply();//等待应答I2C_write_bit(data);//发送写数据I2C_reply();//等待应答I2C_stop();//停止信号delay2(250);}/****************************************************************************** ** Function Name : I2C_read_addr()* Description : 指定地址读* Input : None* Output : None* Return : None******************************************************************************* /int I2C_read_addr(int addr){int i=0;I2C_start();//开始信号I2C_write_bit(0xa0);//发送写命令因为要先写入要读的地址I2C_reply();//等待应答I2C_write_bit(addr);//发送读地址I2C_reply();//等待应答I2C_start();//开始信号I2C_write_bit(0xa1);//发送读命令I2C_reply();//等待应答i=I2C_read_bit();I2C_stop();//停止信号delay2(250);return(i);}第二部分:24C02的.h函数#define SCL_H GPIO_SetBits(GPIOB,GPIO_Pin_6)#define SCL_L GPIO_ResetBits(GPIOB,GPIO_Pin_6)#define SDA_H GPIO_SetBits(GPIOB,GPIO_Pin_7)#define SDA_L GPIO_ResetBits(GPIOB,GPIO_Pin_7)#define Write_able GPIO_ResetBits(GPIOB,GPIO_Pin_5)//24C02写使能控制引脚void AT24C02_SDA_IO_SET(unsigned char io_set);void delay2(u8 x) ;void delay_nop(void);void I2C_init(void);void I2C_start();void I2C_stop();void I2C_write_bit(int j);u8 I2C_read_bit();void I2C_reply();void I2C_write_addr(u8 addr,u8 data) ;int I2C_read_addr(int addr) ;第三部分:端口与时钟配置函数由于我们使用的是PB6作为时钟线,PB7作为数据线,所以端口配置PB6,PB7就可以了。
STM32模拟IIC读写24C02程序代码
STM32模拟IIC读写24C02程序代码STM32 模拟IIC读写24C02程序代码最近用到STM32F103V来读写A T24C02 EEPROM 于是从原来51单片机的程序代码的基础上修改了下,移植到了STM32,测试工作正常。
引脚定义和配置:#define SCL GPIO_Pin_6 //24C02 SCL#define SDA GPIO_Pin_7 //24C02 SDAvoid GPIO_Configuration(void){RCC_APB2PeriphClockCmd( RCC_APB2Periph_USART1 |RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOC | RCC_APB2Periph_GPIOD |RCC_APB2Periph_GPIOE, ENABLE);GPIO_InitStructure.GPIO_Pin = SCL; //24C02 SC LGPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = SDA; //24C02 SDA 作为输出GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);}void AT24C02_SDA_IO_SET(unsigned char io_set) //SDA引脚输入输出设置{if(io_set==0){GPIO_InitStructure.GPIO_Pin = SDA; //24C02 SDA 作为输出GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);else if(io_set==1){GPIO_InitStructure.GPIO_Pin = SDA; //24C02 SDA 作为输入GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入GPIO_Init(GPIOB, &GPIO_InitStructure);}else{;}}////////////////////////////////////主程序////////////////////////////////////////////////////////////////////// ////////int main(void){ uchar i;uchar data_24c02;RCC_Configuration(); //时钟配置GPIO_Configuration();//GPIO配置USARTx_configuration();//串口配置WIN24C02_init();delayms(5000);//延时for(i=0;i<20;i++) //写EEPROM数据{ WIN24C02_write(0x00+i,i);delayms(100);}//存数据到EEPROMdelayms(1000);//延时while(1)//串口3发送读取的EEPROM的数据{for(i=0;i<20;i++){ data_24c02=WIN24C02_read(0x00+i);//读取24C02数据USART_SendData(USART3 ,data_24c02);while(USART_GetFlagStatus(USART3,USART_FLAG_TC)==RESET);}delayms(5000);//延时}/////////////////////////////////////////////////////////////////// //////////////////////////////////////////////WIN_24C02.H头文件/**********************中文版本*******************************//*****功能描述: STM32 24C02 读写程序*****//*****作者: 郑文(ClimberWin) *****//*****编写日期: 2013年1月21日*****//*****版本信息: V1.0 *****//*****修改日期: *****//*************************************************************/ #ifndef __WIN24C02_H__#define __WIN24C02_H__#include"STM32_Config.h"#define uchar unsigned char#define uint unsigned intuchar WIN24C02_read(uchar address); //从24c02的地址address中读取一个字节数据void WIN24C02_write(uchar address,uchar info); //向24c02的address地址中写入一字节数据infovoid WIN24C02_init(); //24c02初始化子程序void delay_nop(void);void delay2(uint x);void start();void stop();void writex(uchar j);uchar readx();void clock();void delay2(uint x){uint i;for(i=0;i<x;i++);< p="">}void delay_nop(void){uint8_t i=10; //i=10延时1.5us//这里可以优化速度,经测试最低到5还能写入while(i--);}void WIN24C02_init(){//SCL=1;GPIO_SetBits(GPIOB,SCL);delay_nop();//SDA=1;GPIO_SetBits(GPIOB,SDA);delay_nop();}void start(){//SDA=1;GPIO_SetBits(GPIOB,SDA);delay_nop();//SCL=1;GPIO_SetBits(GPIOB,SCL); delay_nop();//SDA=0;GPIO_ResetBits(GPIOB, SDA); delay_nop();//SCL=0;GPIO_ResetBits(GPIOB, SCL); delay_nop();}void stop(){//SDA=0;GPIO_ResetBits(GPIOB, SDA); delay_nop();//SCL=1;GPIO_SetBits(GPIOB,SCL); delay_nop();//SDA=1;GPIO_SetBits(GPIOB,SDA); delay_nop();}void writex(uchar j){uchar i,temp,temp1;temp=j;//A T24C02_SDA_IO_SET(0); for (i=0;i<8;i++){temp1=temp & 0x80;temp=temp<<1;//SCL=0;GPIO_ResetBits(GPIOB, SCL);delay_nop();//SDA=CY;if(temp1==0x80){GPIO_SetBits(GPIOB, SDA);} else {GPIO_ResetBits(GPIOB, SDA);} delay_nop(); // SCL=1;GPIO_SetBits(GPIOB,SCL);delay_nop();}//A T24C02_SDA_IO_SET(0);//SCL=0;GPIO_ResetBits(GPIOB, SCL);delay_nop();//SDA=1;GPIO_SetBits(GPIOB,SDA);delay_nop();}uchar readx(){uchar i,j,k=0;//SCL=0;GPIO_ResetBits(GPIOB, SCL);delay_nop();//SDA=1;GPIO_SetBits(GPIOB,SDA);AT24C02_SDA_IO_SET(1);for (i=0;i<8;i++){delay_nop();//SCL=1;GPIO_SetBits(GPIOB,SCL);delay_nop();//if (SDA==1) j=1;if( GPIO_ReadInputDataBit(GPIOB,SDA)==1 ) {j=1;}else{j=0;}k=(k<<1)|j;//SCL=0;GPIO_ResetBits(GPIOB, SCL);}AT24C02_SDA_IO_SET(0);delay_nop();return(k);}{uint i=0;AT24C02_SDA_IO_SET(1);//SCL=1;GPIO_SetBits(GPIOB,SCL);delay_nop();while((GPIO_ReadInputDataBit(GPIOB,SDA)==1)&&(i<5000))i++;//SCL=0;GPIO_ResetBits(GPIOB, SCL);delay_nop();AT24C02_SDA_IO_SET(0);}uchar WIN24C02_read(uchar address){uchar i;start();writex(0xa0);clock();writex(address);clock();start();writex(0xa1);clock();i=readx();stop();//delay2(10);delay2(50);return(i);}void WIN24C02_write(uchar address,uchar info) {start();writex(0xa0);clock();writex(address);writex(info);clock();stop();//delay2(50);delay2(250); }#endif</x;i++);<>。
I2C总线 24C02芯片的读写应用

I2C总线24C02芯片的读写应用什么是I2C总线?I2C(Inter-Integrated Circuit)总线是一种由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备。
也可以简单地理解为I2C是微控制器与外围芯片的一种通讯协议。
在不同的书籍中,可能会称为I2C,IIC,或者I平方C,但是概念也是一样的,只是叫法不同。
一﹑I2C总线特点I2C总线的优点非常多,其中最主要体现在1:硬件结构上具有相同的接口界面;2:电路接口的简单性;3:软件操作的一致性。
I2C总线占用芯片的引脚非常的少,只需要两组信号作为通信的协议,一条为数据线(SDA),另一条为时钟线(SCL)。
因此减少了电路板的空间和芯片管脚的数量,所以降低了互联成本。
总线的长度可高达25英尺,并且能够以10Kbps 的最大传输速率支持40个组件。
I2C总线还具备了另一个优点,就是任何能够进行发送和接收数据的设备都可以成为主控机。
当然,在任何时间点上只能允许有一个主控机。
图5-20(总线连接图)二﹑I2C总线工作原理图5-20为I2C总线的连接图。
I2C总线是由数据线SDA和时钟线SCL构成的串行总线,可发送和接收数据。
在单片机与被控IC之间,最高传送速率100kbps。
各种I2C器件均并联在这条总线上,就像电话线网络一样不会互相冲突,要互相通信就必须拨通其电话号码,每一个I2C模块都有唯一地址。
并接在I2C总线上的模块,既可以是主控器(或被控器),也可以是发送器(或接收器),这取决于它所要完成的功能。
I2C总线在传送数据过程中共有四种类型信号,它们分别是:起始信号、停止信号﹑应答信号与非应答信号。
三﹑I2C总线数据的传送规则起始信号:在I2C总线工作过程中,当SCL为高电平时,SDA由高电平向低电平跳变,定义为起始信号,起始信号由主控机产生。
如图5-21所示图5-21(开始信号)停止信号:当SCL为高电平时,SDA由低电平向高电平跳变,定义为停止信号,此信号也只能由主控机产生。
[精品]24c02的连续读写
![[精品]24c02的连续读写](https://img.taocdn.com/s3/m/1dd315cb81eb6294dd88d0d233d4b14e85243e88.png)
24c02的连续读写/**********************************************24c02驱动程序SDA=P3^6;SCL=P3^7;可以写一个字节,写一串字符(以'\n'作为结束标志)可以读一个字节,读一串字符(以'\n'作为结束标志)**********************************************/#include <reg51.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned int#define W24C02 0xA0 //存储器的写地址#define R24C02 0xA1 //存储器的读地址/********************/sbit SDA=P3^6; //AT24C02串行数据5脚sbit SCL=P3^7; //AT24C02串行时钟6脚void start_24c02(); //开始void stop_24c02(); //停止void response_24c02(bit); //应答void write_8bit(uchar); //写8位void write_byte(uchar,uchar); //写一字节void write_list(uchar, uchar *); //写*指向的数据(以'\n'作结束)uchar read_8bit(); //读8位uchar read_byte(uchar); //从某一地址读1字节void read_list(uchar,uchar *); //从某一地址开始连续读,存到*所指位置/********************开始,在读\写前调用********************/void start_24c02(){SDA=1;_nop_();_nop_();SCL=1;_nop_();_nop_();SDA=0;_nop_();_nop_();}/********************结束,在读\写完后调用********************/void stop_24c02(){SDA=0;_nop_();_nop_();SCL=1;_nop_();_nop_();SDA=1;_nop_();_nop_();}/********************应答当单片机写时,ack=1,为等待24c02的应答信号当单片机读时,ack=0,为向24c02发送应答信号********************/void respons_24c02(bit ack) //ak为1则单片机接收24c02的应答信号;ak为0则24c02接收单片机的应答信号{uchar i=0;SDA=ack;while(i<250&&SDA==1)i++;SCL=1;_nop_();_nop_();SCL=0;_nop_();SDA=1;}/********************向24c02写入一字节(8位)的数据********************/void write_8bit(uchar dat) {uchar i;SCL=0;for(i=0;i<8;i++){dat=dat<<1;SDA=CY;SCL=1;_nop_();_nop_();SCL=0;_nop_();_nop_();}}/********************从24c02读取一字节(8位)的数据********************/ uchar read_8bit(){uchar i,k;for(i=0;i<8;i++){SCL=1;_nop_();_nop_();k=(k<<1)|SDA;SCL=0;_nop_();_nop_();}return k;}/********************向地址addr写入数据dat********************/void write_byte(uchar addr,uchar dat){start_24c02();write_8bit(W24C02);respons_24c02(1);write_8bit(addr);respons_24c02(1);write_8bit(dat);respons_24c02(1);stop_24c02();}/********************从地址addr形如连续写入list中的数据,以'\n'为结束标志********************/void write_list(uchar addr, uchar *list) {uchar i=0;start_24c02();write_8bit(W24C02);respons_24c02(1);write_8bit(addr);respons_24c02(1);do{if(i==0||i%8!=0) //判断是否到了页的边缘{write_8bit(list[i]);respons_24c02(1);}else{stop_24c02(); //写完一页,则进入启动内部写周期do{start_24c02();write_8bit(W24C02);SDA=1;//delay(2);}while(SDA==1); //等待24c02完成写周期发出的应答信号,从而继续下一个读写操作SCL=1;_nop_();_nop_();SCL=0; //应答write_8bit(i);respons_24c02(1);write_8bit(list[i]);respons_24c02(1);}}while(list[i++]!='\n');stop_24c02();}/********************从addr中读取一字节数据返回dat********************/uchar read_byte(uchar addr){uchar dat;start_24c02();write_8bit(W24C02);respons_24c02(1);write_8bit(addr);respons_24c02(1);start_24c02();write_8bit(R24C02);respons_24c02(1);dat=read_8bit(); //读取一字节后若发送停止指令,则结束并返回datstop_24c02();return dat;}/********************从地址addr开始连续读取数据,并存入list中以'\n'为结束********************/void read_list(uchar addr,uchar *list){uchar i=0;start_24c02();write_8bit(W24C02);respons_24c02(1);write_8bit(addr);respons_24c02(1);start_24c02();write_8bit(R24C02);respons_24c02(1);do{list[i]=read_8bit(); //读取1字节后,若其不为结束标志,则发送应答信号,继续读下一个if(list[i]!='\n')respons_24c02(0);}while(list[i++]!='\n');stop_24c02();}。
24C02数据读写

一这物行时每如一、认识IIC 这是最常用、物理结构上,行信息 传输。
时钟。
信息传每个器件都有如:存储器)C 总线的工作方最典型的II IIC 系统由一。
在数据传输传输的对象和方有一个唯一的地。
发送器或接方式C 总线连接方一条串行数据输时,由主机初方向以及信息地址,而且可接收器可以在IIC 时方式。
据线SDA 和一条初始化一次数息传输的开始可以是单接收的在主模式或从模时序24C02的条串行时钟线数据传输,主和终 止均由的器件(例如模式下操作,的操作 线SCL 组成。
主机使数据在S 主机决定。
如:LCD 驱动器这取决于芯片主机按一定的SDA 线上传输器)或者可以接片是否必须启的通信协议向输的同时还通过接收也可以发启动数据的传从机寻址和进过SCL 线传输发送的器件(例传输还是仅仅被进输例被寻1I 在低2I 寻址。
1.总线上数据IIC 总线是以在时钟线高电低电平时,才2.总线上的信IIC 总线在传据的有效性串行方式传输电平期间数据线才允许数据线上信号送数据过程中输数据,从数据线上必须保持上的电平状态中共有四种类据字节的最高持稳定 的逻辑态变化,如图类型信号,它们高位开始传送,辑电平状态,11-2所示。
们分别是:开,每一个数据位高电平为数据开始信号、停止位在SCL 上都据1,低电平为止信号、重新都有一个时钟为数据0。
只新开始信号和应脉冲相对应。
有在时钟线为应答信号。
为开的停停重之所开始信号(STA 的时候,例如停止信号(STO 停止信号,结重新开始信号之前,主机通所示,当SCL ART):如图1如,没有主动设OP):如图11结束数据通信。
号(Repeated S 通过发送重新开L为高电平时,1-3所示,当设备在使用总-3所示,当。
START):在I 开始信号,可,SDA由高电当SCL 为高电总线(SDA 和S SCL 为高电平IC 总线上,由可以转换与当电平向低电平跳平时,SDA 由CL 都处于高电平时,SDA 由低由主机发送一前从机的通信跳变,产生重由高电平向低电电平),主机通低电平向高电一个开始信号启信模 式,或是重新开始信号,电平跳变,产通过发送开始电平跳变,产生启动一次通信是切换到与另,它的本质就产生开始信号始(START)信号生停止信号。
STM32 读写 EEPROM 24C02方法
函数功能:写入 24C02 EEPROM 的内部数据 参数:I2Cx,选定 STM32 的 I2C 接口,x 可以是 1 或 2
Address,24C02 的地址 Subaddress,EEPROM 读取的数据地址 s,为存放连续读取的数据缓冲数组 number,为读取连续数据的长度 注意:使用前确保总线已经结束 ------------------------------------------------------------*/ void EEPROM_24C02_Write(I2C_TypeDef* I2Cx, uint8_t Address, uint8_t Subaddress, vu8 *s, vu8 number) { //启动总线 I2C_GenerateSTART(I2Cx, ENABLE);
//Test on EV6 and clear it while(!I2C_CheckEvent(I2Cx, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
//In the case of a single data transfer disable ACK before reading the data I2C_AcknowledgeConfig(I2Cx, DISABLE);
while((number - 1) > 0) {
number--;
//Read a byte from the EEPROM *s = I2C_ReceiveData(I2Cx);
24c02读写程序

E2PROM芯片24C02的读写程序一、实验目的:给24C02的内部RAM写入一组数据,数据从24C02内部RAM的01h开始存放。
然后再把这组数据读出来,检验写入与读出就是否正确。
在这里我们给24C02中写入0、1、2的段码,然后把它读出来,送到数码管显示。
二、理论知识准备:上面两个实验主要学习的就是利用单片机的串口进行通讯,本实验要介绍的就是基于I2C 总线的串行通讯方法,下面我们先介绍一下I2C总线的相关理论知识。
(一)、I2C总线概念I2C总线就是一种双向二线制总线,它的结构简单,可靠性与抗干扰性能好。
目前很多公司都推出了基于I2C总线的外围器件,例如我们学习板上的24C02芯片,就就是一个带有I2C总线接口的E2PROM存储器,具有掉电记忆的功能,方便进行数据的长期保存。
(二)、I2C总线结构I2C总线结构很简单,只有两条线,包括一条数据线(SDA)与一条串行时钟线(SCL)。
具有I2C 接口的器件可以通过这两根线接到总线上,进行相互之间的信息传递。
连接到总线的器件具有不同的地址,CPU根据不同的地址进行识别,从而实现对硬件系统简单灵活的控制。
一个典型的I2C总线应用系统的组成结构如下图所示(假设图中的微控制器、LCD驱动、E2PROM、ADC各器件都就是具有I2C总线接口的器件):我们知道单片机串行通讯的发送与接收一般都各用一条线TXD与RXD,而I2C总线的数据线既可以发送也可以接受,工作方式可以通过软件设置。
所以,I2C总线结构的硬件结构非常简洁。
当某器件向总线上发送信息时,它就就是发送器,而当其从总线上接收信息时,又成为接收器。
(三)、I2C总线上的数据传送下面我们瞧瞧I2C总线就是如何进行数据传送的。
我们知道,在一根数据线上传送数据时必须一位一位的进行,所以我们首先研究位传送。
1、位传输I2C总线每传送一位数据必须有一个时钟脉冲。
被传送的数据在时钟SCL的高电平期间保持稳定,只有在SCL低电平期间才能够改变,示意图如下图所示,在标准模式下,高低电平宽度必须不小于4、7us。
EEPROM24C02,程序将对存储器进行读和写

/*EEPROM24C02,程序将对存储器进行读和写,因此涉及到键盘程序,比较复杂,耐心学,例子读取24C02内部数据,在数码管上显示,可通过按键来进行不同地址数据的读取和保存*/#include <reg51.h>#include <intrins.h>#define W24C02 0xA0 //存储器的写地址#define R24C02 0xA1 //存储器的读地址#define MSB 0x80 //8位二进制最高位置1#define LSB 0x01 //8位二进制最低位置1/********************/sbit SDA=P3^6; //A T24C02串行数据5脚sbit SCL=P3^7; //A T24C02串行时钟6脚sbit SPK=P3^4; //蜂鸣器,按键用时蜂鸣void I2C_write(unsigned char tmp); //向I2C总线写数据unsigned char I2C_read(); //向I2C总线读数据void I2C_ACK(bit tmp); //ACK应答void I2C_start(void); //I2C传送数据的开始void I2C_stop(void); //I2C传送数据的结束void _24c02menu(void); //当我们按下按键进入处理I2C数据时用的函数void _24c02wdate(unsigned char tmp); //当我们对24C02存储器进行写数据用到的函数void display(unsigned char *lp,unsigned char lc);//显示,在键盘程序里用过void displaystr(unsigned char *lp,unsigned char lc);//字符的显示函数,同上void delay();//延时子函数void ReadKey(void); //扫描键盘获取键值unsigned char l_key=0xFF; //定义变量,存放键值unsigned char l_keyold=0; //做为按键松开否的凭证code unsigned char l_24C02[5]={0x5b,0x66,0x39,0x3f,0x5b};//定义数组常量在数码管上显示24C02unsigned char l_address=0; //读24C02的地址变量unsigned char l_tmpdate[6]={0,0,0x10,0,0,0}; //数组变量code unsigned char table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x40};//共阴数码管0-9 a-f - 表code unsigned char key_tab[17]={0xed,0x7e,0x7d,0x7b,0xbe,0xbd,0xbb,0xde,0xdd,0xdb,0x77,0xb7,0xee,0xd7,0xeb,0xe7,0XFF};//========================此数组为键盘编码,// 1 2 3 a// 4 5 6 b// 7 8 9 e// * 0 # fvoid main(void) //入口函数{TMOD=0x01; //设置定时器0为模式1方式,TH0=0XD1; //设置初值,为12毫秒TL0=0X20;EA=1; //开启总中断ET0=1; //开启定时器中断0EX0=1; //开启外部中断0IT0=1; // 设置成下降沿触发方式P0=0xf0; //while(1){displaystr(l_24C02,5); //用这个函数显示5个字符if(l_key==0x0e){l_key=0xff; //按下#键调用_24c02menu(); //此函数}}}//以下一部份在键盘程序里有说明,此处不在讲述void key_scan() interrupt 0 //外部中断0 0的优先级最高{EX0=0;TH0=0XD1;TL0=0X20;TR0=1;}void timer0_isr(void) interrupt 1 //定时器0的中断函数{TR0=0;ReadKey();}void ReadKey(void){unsigned char i,j,key;j=0xfe;key=0xff;for (i=0;i<4;i++){P0=j;if ((P0&0xf0)!=0xf0){key=P0;break;}j=_crol_(j,1);}if (key==0xff){l_keyold=0xff;P0=0xf0;SPK=1;EX0=1;return;}else{TH0=0X2E;TL0=0X20;TR0=1;SPK=0;}if(l_keyold!=key){l_keyold=key;for(i=0;i<17;i++){if (key==key_tab[i]){l_key=i;break;}}}}void display(unsigned char *lp,unsigned char lc)//显示{unsigned char i;P2=0;P1=P1&0xF8;for(i=0;i<lc;i++){P2=table[lp[i]];P2=0;if(i==7)break;P1++;}}void displaystr(unsigned char *lp,unsigned char lc)//显示{unsigned char i;P2=0;P1=P1&0xF8;for(i=0;i<lc;i++){P2=lp[i];delay();P2=0;if(i==7)break;P1++;}}void delay(void) //{unsigned char i=10;while(i)i--;}void _24c02menu(void) //处理I2C数据时用的函数{unsigned char tmp,tmp2;P2=0; //数码管显示清0l_key=0xfe; //进入存储器处理程序先读取0地址的数据while (1){if(l_key==0x0c){ //如果按下*号键退出循环,即退出回到主函数l_key=0xff;break;}switch(l_key){ //扫描键盘做相应处理case 0x0a: //按下0X0A键,我们可将它理解为上翻键l_key=0xff;if(l_address>0){l_address--; //将地址减1l_key=0xfe; //读取数据break;case 0x0b: //按下0X0A键,我们可将它理解为下翻键l_key=0xff;if(l_address<255){l_address++; //将地址加1l_key=0xfe; ////读取数据}break;case 0x0e: //如果按下#号键,调用写存储器函数l_key=0xff;_24c02wdate(tmp);l_key=0xfe;break;case 0xfe: //此按值是在键盘是没有的,我们有内部给他增加做为读数据处理l_key=0xff;I2C_start(); //I2C读数据的开始,到下面的结束是读一地址的整个过程,I2C_write(W24C02); //向I2C总线发出读取24C02的地址I2C_ACK(0); //下面就得你们自己结合I2C串口协议进行,先看看24C02数据手册是怎么讲I2C协议的I2C_write(l_address);//先写入地址,I2C_ACK(1);I2C_stop();I2C_start(); //再开始读取数据I2C_write(R24C02);I2C_ACK(0);tmp=I2C_read();I2C_ACK(1);I2C_stop(); //读取一个地址的数据结束l_tmpdate[0]=l_address/16; //数码管前两位显示地址(以16进制显示)l_tmpdate[1]=l_address%16; //将地址变量分开用两位数据l_tmpdate[3]=tmp/100; //后面用10进制数显示数据,中间用"-"隔开,数组l_tmpdate[2]tmp2=tmp%100; //8位二进制最大十进制为255,所以我们也将它分开三位显示l_tmpdate[4]=tmp2/10;l_tmpdate[5]=tmp2%10;break;}display(l_tmpdate,6);}}void _24c02wdate(unsigned char tmp)//对24C02的写数据处理函数{unsigned char tmp2=0;while(1){if (l_key==0x0c){ //如果按下*号键退出循环,即退出回到上一极函数l_key=0xff;break;}if(l_key==0x0e){ //如果按下#号键,将更改的数据写入24C02存储器l_key=0xff;I2C_start(); //下面是写一地址数据的过程I2C_write(W24C02); //先向总线发出写24C02的地址I2C_ACK(0);I2C_write(l_address); //写入地址I2C_ACK(0);I2C_write(tmp); //然后写入数据I2C_ACK(1);I2C_stop();break;}switch(l_key){ //下面是对数据的处理case 0x01: //如果按下1键,数据百位加1l_key=0xff;if(tmp<155)tmp+=100;break;case 0x02: //如果按下2键,数据十位加1l_key=0xff;if(tmp<245)tmp+=10;break;case 0x03: //如果按下3键,数据个位加1l_key=0xff;if(tmp<255)tmp++;break;case 0x04: //如果按下4键,数据百位减1l_key=0xff;if(tmp>=100)tmp-=100;break;case 0x05: //如果按下5键,数据十位减1l_key=0xff;if(tmp>=10)tmp-=10;break;case 0x06: //如果按下6键,数据个位减1l_key=0xff;if(tmp>0)tmp--;break;}l_tmpdate[3]=tmp/100; //地址不变我们不用修改,更改数据显示即可tmp2=tmp%100;l_tmpdate[4]=tmp2/10;l_tmpdate[5]=tmp2%10;display(l_tmpdate,6);}}void I2C_write(unsigned char tmp)//I2C写入一个8位二进制数,高位在前低位在后{unsigned char i;for(i=0;i<8;i++){SCL=0;_nop_();_nop_();_nop_();SDA=(bit)(tmp&0x80);tmp<<=1;_nop_();_nop_();_nop_();_nop_();_nop_();SCL=1;_nop_();_nop_();_nop_();_nop_();_nop_();}SCL=0;}unsigned char I2C_read(void)////I2C读取一个8位二进制数,也是高位在前低位在后{unsigned char i,tmp;tmp=0;for(i=0;i<8;i++){SCL=0;_nop_();_nop_();_nop_(); //加入空指令增加稳定性,这关系到频率问题SDA=1;_nop_();_nop_();_nop_();_nop_();_nop_();SCL=1;_nop_();_nop_();_nop_();_nop_();_nop_();tmp<<=1;if(SDA==1)tmp++;}SCL=0;return tmp;}void I2C_ACK(bit tmp) //根据tmp的1、0来决定应答信号{SDA=tmp;_nop_();_nop_();_nop_();_nop_();_nop_();SCL=1;_nop_();_nop_();_nop_();_nop_();_nop_();SCL=0;}void I2C_start(void) //看看I2C开始的波形,再对应SDA、SCL的输出{SDA=1;_nop_();SCL=1;_nop_();SDA=0;_nop_();SCL=0;_nop_();}/*********/void I2C_stop(void) //I2C结束{SDA=0;_nop_();SCL=1;_nop_();SDA=1;_nop_();SCL=0;_nop_();}。
24c02读写--相关资料

24c02读写—相关资料AT24C02是美国Atmel公司的低功耗CMOS型E2PROM,内含256×8位存储空间,具有工作电压宽(2.5~5.5 V)、擦写次数多(大于10 000次)、写入速度快(小于10 ms)、抗干扰能力强、数据不易丢失、体积小等特点。
而且他是采用了I2C总线式进行数据读写的串行器件,占用很少的资源和I/O线,并且支持在线编程,进行数据实时的存取十分方便。
1 AT24C02的引脚功能AT24C02引脚如图1所示。
他的的1、2、3脚是3根地址线,用于确定芯片的硬件地址。
第8脚和第4脚分别为正、负电源。
第5脚SDA为串行数据输入/输出,数据通过这根双向I2C总线串行传送。
第6脚SCL为串行时钟,SDA和SCL为漏极开路端,在实际的应用当中都需要和正电源间各接一个5.1 kΩ的电阻上拉。
第7脚为WP写保护端,接地时允许芯片执行一般的读写操作;接正电源时只允许对器件进行读操作。
2 AT24C02的内部结构图2为AT24C02的内部结构图。
启动、停止逻辑单元 接收数据引脚SDA上的电平信号,判断是否进行启动和停止操作串行控制逻辑单元 根据SCL,SDA电平信号以及“启动、停止逻辑”部件发出的各种信号进行区分,并排列出有关的“寻址”、“读数据”和“写数据”等逻辑,将他们传送到相应的操作单元。
例如:当操作命令为“寻址”时候,他将通知地址计数器加1,并启动“地址比较”器进行工作。
在“读数据”时,他控制“Dout/确认逻辑”单元;在“写数据”时候,他控制“高压泵/定时”电路,以便向E2PROM电路提供编程所需要的高电压。
地址/计数器单元 产生访问E2PROM所需要的存储单元的地址,并将其分别送到X译码器进行字选,送到Y译码器进行位选。
高压泵/定时单元 由于E2PROM数据写入时候需要向电路施加编程高电压,为了解决单一电源电压的供电问题,芯片生产厂家采用了电压的片内提升电路。
电压的提升范围一般可以达12~21.5 V。
stm32F103模拟I2C读写24c02

/*********文件名:i2c_ee.h**********//* Define to prevent recursive inclusion ------------------------------------ */#ifndef __I2C_EE_H#define __I2C_EE_H/* Includes ------------------------------------------------------------------*/#include "stm32f10x.h"/* Exported macro ------------------------------------------------------------*/#define ADDR_24CXX 0xA0#define SCLH GPIOB->BSRR = GPIO_Pin_6#define SCLL GPIOB->BRR = GPIO_Pin_6#define SDAH GPIOB->BSRR = GPIO_Pin_7#define SDAL GPIOB->BRR = GPIO_Pin_7#define SCLread GPIOB->IDR & GPIO_Pin_6#define SDAread GPIOB->IDR & GPIO_Pin_7/* Exported functions ------------------------------------------------------- */void I2C_EE_Init(void);uint8_t I2C_EE_BufferWrite(uint8_t *psrc_data,uint8_t adr,uint8_t nbyte); uint8_t I2C_EE_BufferRead(uint8_t *pdin_data,uint8_t adr,uint8_t nbyte);#endif /* __I2C_EE_H *//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////*********文件名:i2c_ee.c**********/#include "i2c_ee.h"enum ENUM_TWI_REPLY{TWI_NACK=0,TWI_ACK=1};enum ENUM_TWI_BUS_STATE{TWI_READY=0,TWI_BUS_BUSY=1,TWI_BUS_ERROR=2};void I2C_EE_Init(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);// Configure I2C1 pins: SCL and SDAGPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_Init(GPIOB, &GPIO_InitStructure);}void TWI_delay(void){uint8_t i=10; //i=10延时1.5us//这里可以优化速度,经测试最低到5还能写入while(i--);}/**************************************************************************延时ms:延时的毫秒数CYCLECOUNTER / 72000000***************************************************************************/void DelayMs(uint16_t ms){uint16_t iq0;uint16_t iq1;for(iq0 = ms; iq0 > 0; iq0--){for(iq1 = 11998; iq1 > 0; iq1--); // ( (6*iq1+9)*iq0+15 ) / 72000000}}uint8_t TWI_Start(void){SDAH;SCLH;TWI_delay();if(!SDAread)return TWI_BUS_BUSY; //SDA线为低电平则总线忙,退出SDAL;TWI_delay();if(SDAread) return TWI_BUS_ERROR; //SDA线为高电平则总线出错,退出 SCLL;TWI_delay();return TWI_READY;}/*void TWI_Stop(void){SCLL;TWI_delay();SDAL;SCLH;TWI_delay();SDAH;TWI_delay();}*/void TWI_Stop(void) {SDAL;SCLL;TWI_delay();SCLH;TWI_delay();SDAH;TWI_delay();}void TWI_Ack(void) {SCLL;TWI_delay();SDAL;TWI_delay();SCLH;TWI_delay();SCLL;TWI_delay();}void TWI_NoAck(void) {SCLL;TWI_delay();SDAH;TWI_delay();SCLH;SCLL;TWI_delay();}uint8_t TWI_WaitAck(void) //返回为:=1有ACK,=0无ACK {SCLL;TWI_delay();SDAH;TWI_delay();SCLH;TWI_delay();if(SDAread){SCLL;return 0;}SCLL;return 1;}void TWI_SendByte(uint8_t SendByte) //数据从高位到低位// {uint8_t i=8;while(i--){SCLL;TWI_delay();if(SendByte&0x80)SDAH;elseSDAL;SendByte<<=1;TWI_delay();SCLH;TWI_delay();}SCLL;}uint8_t TWI_ReceiveByte(void) //数据从高位到低位//{uint8_t i=8;uint8_t ReceiveByte=0;SDAH;while(i--){ReceiveByte <<= 1;SCLL;TWI_delay();SCLH;TWI_delay();if(SDAread){ReceiveByte |= 0x01;}}SCLL;return ReceiveByte;}//返回:3写入成功;0写器件地址出错,1总线忙,2出错//写入1字节数据SendByte:待写入数据WriteAddress:待写入地址uint8_t TWI_WriteByte(uint8_t SendByte, uint8_t WriteAddress){uint8_t i;uint16_t j;i = TWI_Start();if(i)return i;TWI_SendByte( ADDR_24CXX & 0xFE);//写器件地址写入:地址最低位是0,读取:地址最低位是1if(!TWI_WaitAck()){TWI_Stop();return 0;}TWI_SendByte(WriteAddress); //设置起始地址TWI_WaitAck();TWI_SendByte(SendByte); //写数据TWI_WaitAck();TWI_Stop();//注意:因为这里要等待EEPROM写完,可以采用查询或延时方式(10ms) DelayMs(12); //写入延时12ms 写周期大于10ms即可return 3;}//返回:0写器件地址出错,1总线忙,2出错,//读出1字节数据//ReadAddress:待读出地址uint8_t TWI_ReadByte( uint8_t ReadAddress){uint8_t i,temp;i = TWI_Start();if(i)return i;TWI_SendByte((ADDR_24CXX & 0xFE));//写器件地址,先执行一次伪写操作if(!TWI_WaitAck()){TWI_Stop();return 0;}TWI_SendByte(ReadAddress); //设置起始地址TWI_WaitAck();TWI_Start();TWI_SendByte((ADDR_24CXX & 0xFE)|0x01); //读器件地址写入:地址最低位是0,读取:地址最低位是1TWI_WaitAck();//*pDat = TWI_ReceiveByte();temp = TWI_ReceiveByte();TWI_NoAck();TWI_Stop();return temp;//返回的如果是0,1,2则与错误代码相同了,再考虑一下}/***************************************************************************向24c256中写多个字节psrc_data:指向要写入数据数组的指针adr:24c256中要写入数据的首地址nbyte:写入的字节数返回值: 0:执行完毕;1:执行出现错误形参中:C02只有一个地址adr;C256中有高位地址hadr和低位地址ladr***************************************************************************/uint8_t I2C_EE_BufferWrite(uint8_t *psrc_data,uint8_t adr,uint8_t nbyte){uint8_t i;for(;nbyte!=0;nbyte--){i = TWI_Start();if(i)return i;TWI_SendByte( ADDR_24CXX & 0xFE);//写器件地址if(!TWI_WaitAck()){TWI_Stop();return 0;}TWI_SendByte(adr); //设置起始地址TWI_WaitAck();TWI_SendByte(*psrc_data); //写数据TWI_WaitAck();psrc_data++; //指向待写数据的指针加1adr++; //对24C08的操作地址加1TWI_Stop();//注意:因为这里要等待EEPROM写完,可以采用查询或延时方式(10ms) DelayMs(12); //写入延时12ms 写周期大于10ms即可}return 0;}/***************************************************************************从24c02读多个字节pdin_data:指向要保存读出数据的数组的指针adr:24c02中要读出数据的首地址nbyte:读出的字节数返回值: 0:执行完毕;1:执行出现错误***************************************************************************/uint8_t I2C_EE_BufferRead(uint8_t *pdin_data,uint8_t adr,uint8_t nbyte) {uint8_t i;i = TWI_Start();if(i)return i;TWI_SendByte((ADDR_24CXX & 0xFE));//写器件地址,先执行一次伪写操作if(!TWI_WaitAck()){TWI_Stop();return 0;}TWI_SendByte(adr); //设置起始地址TWI_WaitAck();TWI_Start();TWI_SendByte((ADDR_24CXX & 0xFE)|0x01); //读器件地址写入:地址最低位是0,读取:地址最低位是1TWI_WaitAck();while(nbyte!=1) //读入前(nbyte-1)个字节{*pdin_data = TWI_ReceiveByte(); //循环从24C02中读数据,存入pdin_data所指的存储器中TWI_Ack(); //IIC应答pdin_data++; //指向存储读入数据的存储器指针加1nbyte--; //剩余要读入的字节减1};*pdin_data = TWI_ReceiveByte(); //读入最后一个字节TWI_NoAck(); //IIC无应答操作TWI_Stop();return 0;}/*void TWI_24CXX_Write(uint8_t* pDat, uint8_t nAddr, uint8_t nLen) {uint16_t i;for(i=0;i<nLen;i++){TWI_WriteByte(*(pDat+i), nAddr+i);}}void TWI_24CXX_Read(uint8_t* pDat, uint8_t nAddr, uint8_t nLen) {uint16_t i;for(i=0; i<nLen; i++)*(pDat+i) = TWI_ReadByte(nAddr+i);}*/。
STM32F0单片机用 I2C HAL 库读写24C02
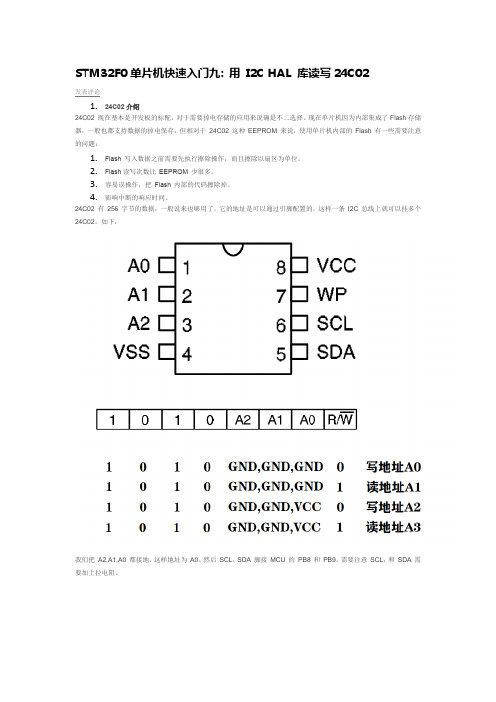
STM32F0单片机快速入门九: 用I2C HAL 库读写24C02发表评论1.24C02介绍24C02 现在基本是开发板的标配,对于需要掉电存储的应用来说确是不二选择。
现在单片机因为内部集成了Flash存储器,一般也都支持数据的掉电保存,但相对于24C02 这种EEPROM 来说,使用单片机内部的Flash 有一些需要注意的问题:1.Flash 写入数据之前需要先执行擦除操作,而且擦除以扇区为单位。
2.Flash读写次数比EEPROM 少很多。
3.容易误操作,把Flash 内部的代码擦除掉。
4.影响中断的响应时间。
24C02 有256 字节的数据,一般说来也够用了。
它的地址是可以通过引脚配置的,这样一条I2C 总线上就可以挂多个24C02。
如下:我们把A2,A1,A0 都接地,这样地址为A0。
然后SCL,SDA 脚接MCU 的PB8 和PB9。
需要注意SCL,和SDA 需要加上拉电阻。
1.代码下面我们在一个I2C 例程上面修改代码来实现24C02 的读写。
大家可以看到使用库函数的好处,基本上不用看STM32F030 的手册,很快就能实现我们想要实现的功能。
我们用Keil 打开下面这个工程:STM32Cube_FW_F0_V1.11.0\Projects\STM32F030R8-Nucleo\Examples\I2C\I2C_TwoBoards_ComPolling\MDK-AR M\Project.uvprojxStep 1, 把I2C 地址改为跟我们硬件一致:Step 2, 根据实际使用的I2C 模块和引脚进行配置:Step 3, 把地址模式改为7BIT:Step 4, 操作EEPROM,我们不使用例子中的HAL_I2C_Master_Transmit 和HAL_I2C_Master_Receive,这两个函数适用于两个I2C 器件之间进行数据传输。
我们这里要用的是下面这两个函数:HAL_I2C_Mem_Write(I2C_HandleTypeDef *hi2c, // 使用的I2C 模块的Handle 的指针uint16_t DevAddress, // I2C 器件的地址,这里是24C02 的地址0xA0uint16_t MemAddress, // 存储器内部地址uint16_t MemAddSize, // 存储器内部地址位数8BIT or 16BIT ?uint8_t *pData, // 发送数据缓冲区指针uint16_t Size, // 数据长度uint32_t Timeout // 超时设置);HAL_I2C_Mem_Read(I2C_HandleTypeDef *hi2c, // 使用的I2C 模块的Handle 的指针uint16_t DevAddress, // I2C 器件的地址,这里是24C02 的地址0xA0uint16_t MemAddress, // 存储器内部地址uint16_t MemAddSize, // 存储器内部地址位数8BIT or 16BIT ?uint8_t *pData, // 接收数据缓冲区指针uint16_t Size, // 接收数据长度uint32_t Timeout // 超时设置);在此我们写入数据用的24C02 的Page Write 命令,每次写入8个字节的数据,然后存储器写入地址加8。
实战24C02读写

实战24C02读写AT24C02是美国ATMEL公司的低功耗CMOS串行EEPROM,它是内含256×8位存储空间,具有工作电压宽(2.5~5.5V)、擦写次数多(大于10000次)、写入速度快(小于10ms)等特点。
24C02与单片机的联接参见原理图 ,读写程序如下,运行此程序,可以看到其中之一数码管循环显示0,1,2,3,4,5,6,7,8,9的效果。
其根本是,先往24C02中写数据,然后,读出数据,在数码管中显示,这样直观明了,详细说明,请看程序中注解。
此程序是针对24c02的,其实,可以扩展来其他i2c的eeprom.这由你们来完成吧。
#include <at89x51.h>#include <intrins.h> //此文件中有_nop_()空操作函数#define uchar unsigned char#define uint unsigned int#define OP_READ 0xa1 // 器件地址以及读取操作#define OP_WRITE 0xa0 // 器件地址以及写入操作uchar code display[10]={0x28,0xEB,0x32,0xA2,0xE1,0xA4,0x24,0xEA,0x20,0xA0};//数码管0,1,2,3,4,5,6,7,8,9的编码sbit SDA = P2^0; //位定义sbit SCL = P2^1; //位定义void LED_display(uchar i);//数码管显示编码获取函数,例如,i=0,则P0=display[0],即显示数字“0”void start();//开始位void stop();//停止位uchar shin();//从AT24C02移入数据到MCUbit shout(uchar write_data);//从MCU移出数据到AT24C02void write_byte( uchar addr, uchar write_data); //在指定地址addr处写入数据write_datavoid fill_byte(uchar fill_size,uchar fill_data);//填充数据fill_data到EEPROM内fill_size字节void delayms(uchar ms); // 延时子程序uchar read_current(); // 在当前地址读取uchar read_random(uchar random_addr);// 在指定地址读取void LED_display(uchar i){P0 = display[i];}main(void){uchar i;uint j;SDA = 1;SCL = 1;fill_byte(11,0xff); // 将前10字节填充0xfffor(i = 0 ; i < 10; i++) //写入显示代码到AT24C02{write_byte(i, i);P2_7 = 0; //打开数码管1的显示for(i =0 ;i <10 ; i++){LED_display(read_random(i));for (j = 0; j<35000;j++);//延时}}void start()//开始位{SDA = 1;SCL = 1;_nop_();_nop_();SDA = 0;_nop_();_nop_();_nop_();_nop_();SCL = 0;}void stop()// 停止位{SDA = 0;_nop_();_nop_();SCL = 1;_nop_();_nop_();_nop_();_nop_();SDA = 1;}uchar shin()// 从AT24C02移入数据到MCU {uchar i,read_data;for(i = 0; i < 8; i++){SCL = 1;read_data <<= 1;read_data |= (uchar)SDA;SCL = 0;return(read_data);}bit shout(uchar write_data)// 从MCU移出数据到AT24C02{uchar i;bit ack_bit;for(i = 0; i < 8; i++) // 循环移入8个位{SDA = (bit)(write_data & 0x80);_nop_();SCL = 1;_nop_();_nop_();SCL = 0;write_data <<= 1;}SDA = 1; // 读取应答_nop_();_nop_();SCL = 1;_nop_();_nop_();_nop_();_nop_();ack_bit = SDA;SCL = 0;return ack_bit; // 返回AT24C02应答位}void write_byte(uchar addr, uchar write_data)// 在指定地址addr处写入数据write_data{start();shout(OP_WRITE);shout(addr);shout(write_data);stop();delayms(10); // 写入周期}void fill_byte(uchar fill_size,uchar fill_data)// 填充数据fill_data到EEPROM内fill_size字节{uchar i;for(i = 0; i < fill_size; i++){write_byte(i, fill_data);}}uchar read_current()// 在当前地址读取{uchar read_data;start();shout(OP_READ);read_data = shin();stop();return read_data;}uchar read_random(uchar random_addr) // 在指定地址读取{start();shout(OP_WRITE);shout(random_addr);return(read_current());}void delayms(uchar ms)// 延时子程序{uchar i;while(ms--){for(i = 0; i < 120; i++);}}。
24C02读写程序
24C02读写程序HT49 MCU系列单片机读写HT24系列的EEPROM应用范例HT49 MCU系列单片机读写HT24系列的EEPROM应用范例文件编码:HA0017s简介:HT24系列的EEPROM是通过I2C协议控制其读写的。
HT49系列单片机的接口部分是简单I/O 口,可以用来很方便地采用I2C协议控制周边器件。
HT24系列的EEPROM总共8个管脚,三个为芯片地址脚A0、A1、A2,在单片机对它进行操作时,从SDA输入A0、A1、A2数据和芯片外部A0、A1、A2所接地址需一一对应。
一个为芯片写保护脚WP,WP脚接低电平时,芯片可进行读写操作;WP脚接高时,芯片只可进行读,不可进行写。
另外两个管脚为电源脚VCC,VSS。
用单片机对HT24系列的EEPROM进行控制时,HT24系列的EEPROM的外部管脚VCC、VSS、WP、A0、A1、A2根据需要,对应接上,SDA、SCL接到单片机控制脚上。
引脚名称I/O 功能描述A0~A2 I地址输入VSS I电源负极输入SDA I/O串行数据输入/输出SCL I串行数据传送时钟信号输入WP I写保护VCC I电源正极输入HT24系列的EEPROM根据型号不同,EEPROM的容量大小不同,当EEPROM的空间大于1页(256bytes)时,即大于2048bits,则HT49 MCU需要控制A0、A1、A2来确定写HT24系列的EEPROM 的第几页,HT24系列的EEPROM空间大小如下表所示:型号引脚A0、A1及A2使用方法容量大小HT24LC02 A0、A1、A2引脚作为器件地址输入,从SDA输入A0、A1、A2数据和芯片引脚A0、A1、A2所接状态需一一对应2K(256×8)HT24LC04 A1、A2引脚作为器件地址输入,从SDA输入A1、A2数据和芯片引脚A1、A2所接状态需一一对应,A0引脚浮空4K(512×8,2pages)HT24LC08 A2引脚器件地址输入,从SDA输入A2数据和芯片引脚A2所接状态需一一对应,其余引脚浮空8K(1024×8,4pages)HT24LC16 A0、A1、A2全部浮空,不必接16K(2048×8,8pages)HT49 MCU系列单片机读写HT24系列的EEPROM应用范例程式说明:本文是以HT49R30A-1控制HT24LC04为例的。
STM32 读写 EEPROM 24C02方法
//In the case of a single data transfer disable ACK before reading the data I2C_AcknowledgeConfig(I2Cx, DISABLE);
//Send STRAT condition a second time I2C_GenerateSTART(I2Cx, ENABLE);
//Test on EV6 and clear it while(!I2C_CheckEvent(I2Cx, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED));
printf("\r\n The slave address is %x \r\n", I2C_ReceiveData(I2Cx));
//
printf("\r\n The I2C1 succeed 2 \r\n");
#endif }
}
/*-----------------------------------------------------------函数名:EEPROM_24C02_Read 函数功能:读取 24C02 EEPROM 的内部数据 参数:I2Cx,选定 STM32 的 I2C 接口,x 可以是 1 或 2
while((number - 1) > 0) {
C语言程序写入按键次数到24c02,并读出来显示在4个LED上
C语言程序写入按键次数到24c02,并读出来显示在4个LED上#define uchar unsigned char //定义一下方便使用#define uint unsigned int#define ulong unsigned long#include //包括一个52标准内核的头文件char code dx516[3] _at_ 0x003b;//这是为了仿真设置的#define WriteDeviceAddress 0xa0 //定义器件在IIC总线中的地址#define ReadDviceAddress 0xa1sbit SCL=P2^7;sbit SDA=P2^6;sbit P10=P1^0;sbit K1=P3^2;//定时函数void DelayMs(unsigned int number){unsigned char temp;for(;number!=0;number--){for(temp=112;temp!=0;temp--) ;}}//开始总线void Start(){SDA=1;SCL=1;SDA=0;SCL=0;}//结束总线void Stop(){SCL=0;SDA=0;SCL=1;SDA=1;}//发ACK0void NoAck(){SDA=1;SCL=1;SCL=0;}//测试ACKbit TestAck(){bit ErrorBit;SDA=1;SCL=1;ErrorBit=SDA;SCL=0;return(ErrorBit);}//写入8个bit到24c02void Write8Bit(unsigned char input) {unsigned char temp;for(temp=8;temp!=0;temp--){SDA=(bit)(input&0x80);SCL=1;SCL=0;input=input<<1;}}//写入一个字节到24c02中void Write24c02(uchar ch,uchar address) {Start();Write8Bit(WriteDeviceAddress); TestAck();Write8Bit(address);TestAck();Write8Bit(ch);TestAck();Stop();DelayMs(10);}//从24c02中读出8个bituchar Read8Bit(){unsigned char temp,rbyte=0;for(temp=8;temp!=0;temp--){SCL=1;rbyte=rbyte<<1;rbyte=rbyte|((unsigned char)(SDA));SCL=0;}return(rbyte);}//从24c02中读出1个字节uchar Read24c02(uchar address){uchar ch;Start();Write8Bit(WriteDeviceAddress);TestAck();Write8Bit(address);TestAck();Start();Write8Bit(ReadDviceAddress);TestAck();ch=Read8Bit();NoAck();Stop();return(ch);}//写入按键次数到24c02,并读出来显示在4个LED上void main(void) // 主程序{uchar c1,c2;while(1){c1=Read24c02(0x01); //读出24c02第一个地址数据P1=c1; //显示在P1口的4个LED上if(!K1) //按键处理{c1++; //值加1Write24c02(c1,0x01); //重新写入24c02 while(!K1); //等待按键松开for(c2=0;c2<250;c2++); //松开按键去抖}}}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPIO_InitTypeDef GPIO_InitStructure; //GPIO
ErrorStatus HSEStartUpStatus;
unsigned char Count1 , Count2;
unsigned int USEC;
static vu32 TimingDelay;
unsigned char Readzfc;
字节数据发送函数
函数原型: void SendByte(UCHAR c);
功能:将数据c发送出去,可以是地址,也可以是数据,发完后等待应答,并对
此状态位进行操作.(不应答或非应答都使ack=0)
发送数据正常,ack=1; ack=0表示被控器无应答或损坏。
********************************************************************/
#define SData GPIO_Pin_6 //I2C时钟
#define SCLK GPIO_Pin_7 //I2C数据
/********************************宏定义*******************************************/
#define SCL(x)x ? GPIO_SetBits(GPIOF , SCLK) : GPIO_ResetBits(GPIOF , SCLK)
u8 ack;
/*******************************************************************
起动总线函数
函数原型: void Start_I2c();
功能:启动I2C总线,即发送I2C起始条件.
********************************************************************/
void Start_I2c()
{
SDA(1); //SDA=1;发送起始条件的数据信号
Delay_us_24C02(1);
SCL(1);//SCL=1;
Delay_us_24C02(5); //起始条件建立时间大于4.7us,延时
SDA(0); //SDA=0; /*发送起始信号*/
Delay_us_24C02(5); //起始条件锁定时间大于4μs
void RCC_Configuration(void);
void SysTick_Configuration(void);
void Delay_us_24C02(u32 nTime);
/************************************24C02硬件接口******************************/
SCL(1); //SCL=1;结束条件建立时间大于4μs
Delay_us_24C02(5);
SDA(0); //SDA=1;发送I2C总线结束信号
Delay_us_24C02(4);
}
/*******************************************************************
功能:结束I2C总线,即发送I2C结束条件.
********************************************************************/
void Stop_I2c()
{
SDA(0); //SDA=0; //发送结束条件的数据信号
Delay_us_24C02(1); //发送结束条件的时钟信号
//实验24C02连接在PF口
//WP、A0、A1、A2都接地
#include "stm32f10x_flash.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#define AT24C02 0xa0 //AT24C02地址
/********************************变量定义---------------------------------------------------------*/
#defineSDA(x) x ? GPIO_SetBits(GPIOF , SData) : GPIO_ResetBits(GPIOF , SData)
/********************************变量*******************************************/
SCL(0);//SCL=0; /*钳住I2C总线,准备发送或接收数据*/
Delay_us_24C02(2);
}
/*******************************************************************
结束总线函数
函数原型: void Stop_I2c();
void SendByte(d char c)
{
unsigned char BitCnt;
for(BitCnt=0;BitCnt<8;BitCnt++) //要传送的数据长度为8位
{
if((c<<BitCnt)&0x80) SDA(1); //SDA=1;判断发送位
else SDA(0); // SDA=0
Delay_us_24C02(1);
SCL(1); //SCL=1置时钟线为高,通知被控器开始接收数据位
Delay_us_24C02(5); //保证时钟高电平周期大于4μs
SCL(0);//SCL = 0
}
Delay_us_24C02(2);
SDA(1); //SDA=1位发送完后释放数据线,准备接收应答位
unsigned char pDat[8] = {0x55,0x55,0x55,0x55,0x55,0x55,0x55,0x55};
unsigned char R_Dat[8];
/*********************************声明函数-----------------------------------------------*/