履带底盘的组成介绍及各参数的计算
履带车辆设计计算说明

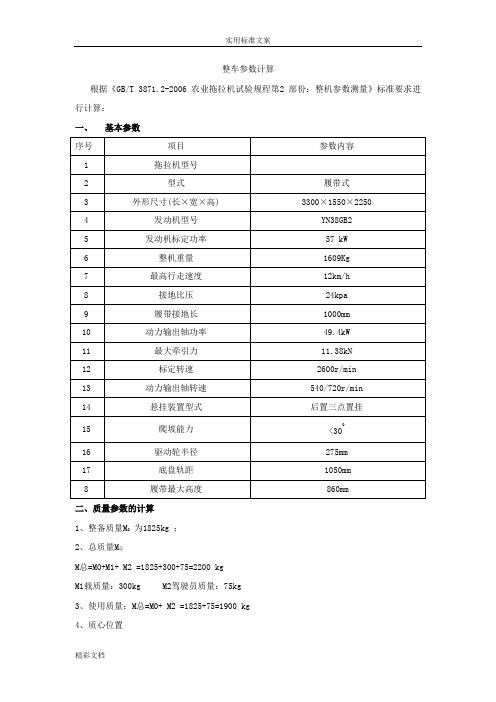
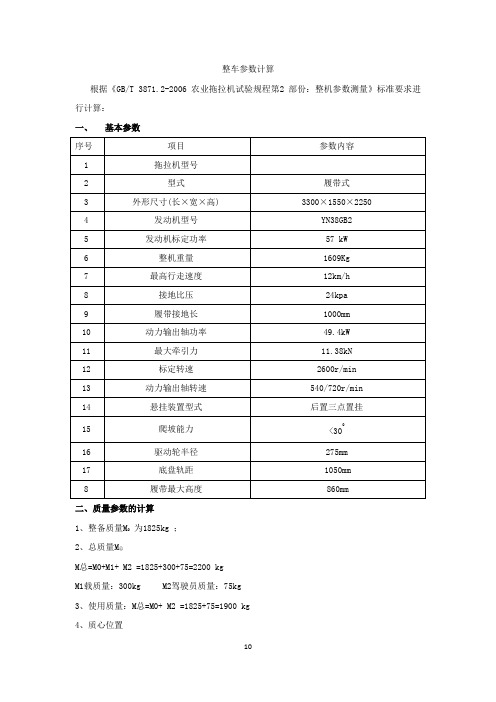
整车参数计算根据《GB/T 3871.2-2006 农业拖拉机试验规程第2 部份:整机参数测量》标准要求进行计算:一、基本参数二、质量参数的计算1、整备质量M0为1825kg ;2、总质量M总M总=M0+M1+ M2 =1825+300+75=2200 kgM1载质量:300kg M2驾驶员质量:75kg3、使用质量:M总=M0+ M2 =1825+75=1900 kg4、质心位置根据《GB/T 3871.15-2006 农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0=830mm质心至前支承点的距离B=610mm 质心至地面的距离h0=450mm满载时:质心至后支承点的距离A0=605mm质心至前支承点的距离B=812mm 质心至地面的距离h0=546mm5、稳定性计算a 、保证拖拉机爬坡时不纵向翻倾的条件是:00h A >δ=0.7 (δ为滑转率)空载时:830/450=1.84>0.7 满载时:605/546=1.11>0.7 满足条件。
b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是:h a2>δ=0.7 a —轨距, a =1200mm h —质心至地面距离mm空载:12002450⨯=1.33>0.7 满载:12002546⨯=1.10>0.7故拖拉机在空、满载运行中均能满足稳定性要求。
三、发动机匹配根据《GB/T 1147.1-2007 中小功率内燃机第1 部份:通用技术条件》标准要求进行计算:XJ —782LT 履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标定功率为57kW/h ,转速为2600r/min.(1)最高设计车速V max =8 km/h ,所需功率:P emax =n1( p f + p w )kw m k V A C v f g m n max d max ⎥⎦⎤⎢⎣⎡⋅⋅+⋅⋅⋅=)()(761403600133122009.80.0280.9 1.4 1.1580.9360076140⎡⎤⨯⨯⨯⨯⨯⨯=+⎢⎥⎣⎦()() =6.188kW(2)根据柴油机全负荷速度特性,最大扭矩点的低速档行车速度V2=4km/h 。
履带车辆设计计算说明

整车参数计算根据《GB/T 3871.2-2006 农业拖拉机试验规程第2 部份:整机参数测量》标准要求进行计算:一、基本参数二、质量参数的计算1、整备质量M0为1825kg2、总质量M总M总=M0+M1+ M2 =1825+300+75=2200 kgM1载质量:300kg M2驾驶员质量:75kg3、使用质量:M总=M0+ M2 =1825+75=1900 kg4、质心位置根据《GB/T 3871.15-2006 农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0=830mm质心至前支承点的距离B=610mm 质心至地面的距离h0=450mm满载时:质心至后支承点的距离A0=605mm质心至前支承点的距离B=812mm 质心至地面的距离h0=546mm5、稳定性计算a 、保证拖拉机爬坡时不纵向翻倾的条件是:00h A >δ=0.7 (δ为滑转率)空载时:830/450=1.84>0.7 满载时:605/546=1.11>0.7 满足条件。
b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是:h a2>δ=0.7 a —轨距, a =1200mm h —质心至地面距离mm空载:12002450⨯=1.33>0.7 满载:12002546⨯=1.10>0.7故拖拉机在空、满载运行中均能满足稳定性要求。
三、发动机匹配根据《GB/T 1147.1-2007 中小功率内燃机第1 部份:通用技术条件》标准要求进行计算:XJ —782LT 履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标定功率为57kW/h ,转速为2600r/min.(1)最高设计车速V max =8 km/h ,所需功率:P emax =n1( p f + p w )kw m k V A C v f g m n max d max ⎥⎦⎤⎢⎣⎡⋅⋅+⋅⋅⋅=)()(761403600133122009.80.0280.9 1.4 1.1580.9360076140⎡⎤⨯⨯⨯⨯⨯⨯=+⎢⎥⎣⎦()() =6.188kW(2)根据柴油机全负荷速度特性,最大扭矩点的低速档行车速度V2=4km/h 。
履带车辆设计计算说明

履带车辆设计计算说明 Document number:PBGCG-0857-BTDO-0089-PTT1998整车参数计算根据《GB/T 农业拖拉机试验规程第2 部份:整机参数测量》标准要求进行计算:一、基本参数二、质量参数的计算1、整备质量M0为1825kg ;2、总质量M总M总=M0+M1+ M2 =1825+300+75=2200 kgM1载质量:300kg M2驾驶员质量:75kg3、使用质量:M总=M0+ M2 =1825+75=1900 kg4、质心位置根据《GB/T 农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0=830mm质心至前支承点的距离B=610mm 质心至地面的距离h0=450mm满载时:质心至后支承点的距离A0=605mm质心至前支承点的距离B=812mm 质心至地面的距离h0=546mm5、稳定性计算a 、保证拖拉机爬坡时不纵向翻倾的条件是:00h A >δ= (δ为滑转率)空载时:830/450=> 满载时:605/546=> 满足条件。
b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是:h a2>δ=0.7 a —轨距, a =1200mm h —质心至地面距离mm空载:12002450⨯=> 满载:12002546⨯=>故拖拉机在空、满载运行中均能满足稳定性要求。
三、发动机匹配根据《GB/T 中小功率内燃机第1 部份:通用技术条件》标准要求进行计算:XJ —782LT 履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标定功率为57kW/h ,转速为2600r/min.(1)最高设计车速Vmax=8 km/h,所需功率:P emax =n1( pf+ pw)kw=(2)根据柴油机全负荷速度特性,最大扭矩点的低速档行车速度V2=4km/h。
选用V2=4km/h,最大爬坡度为25%时,计算所需功率:p emax =n1( pf+ pi+pw)kw=上述两式中:Pf——滚动阻力消耗的功率;Pw——空气阻力消耗的功率;Pi——坡度阻力消耗的功率;η——传动效率系数,取η =;f——滚动阻力系数,取f=;C d ——空气阻力系数,取Cd=;A——拖拉机前进方向迎风面积A=B×H(宽×高)= ×V a ——拖拉机取低档速度Va=4km/h;i max ——最大爬坡坡度,imax=25%;G——拖拉机总质量,G总 =2200kg。
橡胶履带底盘的介绍
单位名称:中运智能机械集团
• 橡胶履带底盘参数 • 长 3000mm • 宽 2045mm • 高 670mm • 起升高度 670mm • 驱动轮直径 312mm • 履带型号/宽度 KD-320/320mm • 履带节数 75节 • 重量 1090KG • 承重 3.5吨 • 动力部分 380V交流电机
• 工程履带底盘介绍
• 工程的履带底盘分为钢制履带底盘和橡胶履带底盘两大类产品,钢制 底盘承载能力在2吨—120吨之间,橡胶底盘承载能力在1吨—12吨之 间,根据不同主机设备工作需求,如履带板宽度,底盘总长度,底盘 总宽度及底盘以上配套件都可以根据用户需要进行灵活多变特殊设计 制造。
• 工程橡胶履带特点
• 橡胶履带底盘工作环境
• (1)橡胶履带的使用温度一般在-25~+55℃之间。 • (2)化学药品、机油、海水的盐份会加快履带的老化,在这样的环
境下使用后要清洗履带。
• (3)有锐利突起(如钢筋、石块等)的路面会导致橡胶履带外伤。 • (4)道路的边石、车辙或凹凸不平的路面会导致履带边缘接地侧花
纹产生裂纹,这种裂纹未伤及钢丝帘线时可以继续使用。
• (5)砂砾、碎石路面会造成与承重轮接触的橡胶表面早期磨损,形 Байду номын сангаас小裂口。严重时水分侵入,造成芯铁脱落、钢丝断裂。
谢谢
单位名称:中运智能机械集团
• 履带是由主动轮驱动、围绕着主动轮、负重轮、诱导轮和 托带轮的柔性链环。履带由履带板和履带销等组成。履带 销将各履带板连接起来构成履带链环。履带板的两端有孔, 与主动轮啮合,中部有诱导齿,用来规正履带,并防止坦 克转向或侧倾行驶时履带脱落,在与地面接触的一面有加 强防滑筋(简称花纹),以提高履带板的坚固性和履带与 地面的附着力。
履带式行走底盘设计

目录摘要 (1)关键词 (1)1前言 (2)1.1该研究的目的及意义 (2)1.2履带式行走地盘设计的国内外发展状况 (2)1.2.1国外的研究与发展 (2)1.2.2国内的研究与发展 (3)2设计任务书 (3)2.1总体设计依据 (3)2.1.1设计要求 (4)2.1.2设计内容 (4)2.2产品用途 (4)2.3产品的主要技术指标与主要技术参数 (4)2.4设计的关键问题及其解决方法 (4)3设计方案的比较分析与选择 (5)3.1行走底盘方案 (5)3.1.1履带式底盘与轮式底盘的比较 (5)3.1.2方案的确定及总体设计 (6)3.2履带行走装置的设计 (6)3.2.1履带行走装置的结构组成及其工作原理 (6)3.2.2履带 (7)3.2.3驱动轮 (7)3.2.4导向轮、支重轮和托带轮 (8)3.2.5张紧装置 (9)4履带底盘相关性能的计算 (11)4.1牵引性能计算 (11)4.2转向最大驱动力矩的分析与计算 (13)4.2.1履带转向时驱动力说明 (13)4.2.2转向驱动力矩的计算 (13)5履带底盘重要零部件的计算及校核 (17)5.1轴的设计与校核 (17)5.1.1轴的尺寸设计 (17)5.1.2轴的校核 (17)5.2驱动轮的校核 (19)5.2.1齿面接触疲劳强度校核 (19)5.2.2齿根弯曲疲劳强度校核 (19)5.3轴承的寿命校核 (20)5.4键的设计及其校核 (20)5.5机架的校核 (20)5.6螺栓的设计及校核 (21)6总结 (22)参考文献 (23)致谢 (24)履带式行走底盘设计摘要:履带式底盘的结构特点和性能决定了它在农田机耕作业中具有明显的优势。
根据农田作业对拖拉机的要求,进行履带式农用拖拉机底盘的设计。
项目研究对提高农机设计水平和农业机械化技术水平具有重要意义。
该研究应用农业机械学、汽车拖拉机学、机械设计、机械原理等理论,对履带式行走底盘的驱动行走系统进行了理论分析与研究,完成了履带底盘主要工作参数的确定和力学的计算。
[精选]履带车辆设计计算说明资料
![[精选]履带车辆设计计算说明资料](https://img.taocdn.com/s3/m/836c1d270b4e767f5acfce57.png)
整车参数计算根据《GB/T 3871.2-2006 农业拖拉机试验规程第2 部份:整机参数测量》标准要求进行计算:一、基本参数二、质量参数的计算1、整备质量M0为1825kg ;2、总质量M总M总=M0+M1+ M2 =1825+300+75=2200 kgM1载质量:300kg M2驾驶员质量:75kg3、使用质量:M总=M0+ M2 =1825+75=1900 kg4、质心位置根据《GB/T 3871.15-2006 农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0=830mm质心至前支承点的距离B=610mm 质心至地面的距离h0=450mm满载时:质心至后支承点的距离A0=605mm质心至前支承点的距离B=812mm 质心至地面的距离h0=546mm5、稳定性计算a 、保证拖拉机爬坡时不纵向翻倾的条件是:00h A >δ=0.7 (δ为滑转率)空载时:830/450=1.84>0.7 满载时:605/546=1.11>0.7 满足条件。
b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是:h a2>δ=0.7 a —轨距, a =1200mm h —质心至地面距离mm空载:12002450⨯=1.33>0.7 满载:12002546⨯=1.10>0.7故拖拉机在空、满载运行中均能满足稳定性要求。
三、发动机匹配根据《GB/T 1147.1-2007 中小功率内燃机第1 部份:通用技术条件》标准要求进行计算:XJ —782LT 履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标定功率为57kW/h ,转速为2600r/min.(1)最高设计车速V max =8 km/h ,所需功率:P emax =n1( p f + p w )kw m k V A C v f g m n max d max ⎥⎦⎤⎢⎣⎡⋅⋅+⋅⋅⋅=)()(761403600133122009.80.0280.9 1.4 1.1580.9360076140⎡⎤⨯⨯⨯⨯⨯⨯=+⎢⎥⎣⎦()() =6.188kW(2)根据柴油机全负荷速度特性,最大扭矩点的低速档行车速度V2=4km/h 。
履带式机器人讲解

自动化工程学院 School of Mechanical Engineering
履带式机器人车体特性
• 轮式机器人: 优点:速度快、效率高、运动噪声低、 缺点:越障能力、地形适应能力差、转弯效率低,或转外 半径大。 适合:野外、城市环境都可以,但是地形不能太复杂,如 上楼梯难以实现 履带式机器人: 优点:越障能力、地形适应、抓地能力强,可原地转弯 缺点:速度相对较低、效率低、运动噪声较大 适合:野外、城市环境都可以,尤其在爬楼梯、越障等方 面优于轮式机器人
管道清理机器人
管道勘察机器人
履带式防爆机器人
搜救机器人
侦查型
侦查型机器人
履带式机器人的机构特点
• 形状可变履带机器人 • 所谓形状可变履带机器人,是指该机器人所用履 带的构形可以根据地形条件和作业要求进行适当 变化。该机器人的主体部分是两条形状可变的履 带,分别由两个主电动机驱动。当两条履带的速 度相同时,机器人实现前进或后退移动;当两条 履带的速度不同时,机器人实现转向运动。当主 臂杆绕履带架上的轴旋转时,带动行星轮转动, 从而实现履带的不同构形,以适应不同的运动和 作业环境
形状可变履带机器人外形结构示 意图
博学笃行 盛德日新
履带式机器人
自动化工程学院
1916年9月,英法联军与德 军在法国索姆河畔展开激战。 英军突然出动了49辆黑黝黝的 钢铁怪物,以每小时6千米的速 度在松软的土地上隆隆地冲向 德军阵地。打得德军人仰马翻。 这就是最早的实战坦克。坦克 为什么能在松软和泥泞的土地 上快速行驶呢?这与它那双 “铁脚板”----履带是不开的。
履带式液压底盘匹配计算

履带式液压底盘匹配计算
履带式液压底盘是指一种采用履带作为牵引装置和液压作为动力源的底盘结构。
它广泛应用于农业、工程机械、采矿设备、军工等领域。
因为履带式液压底盘具有良好的越野性能、牵引力强、承载能力大等优点,因此在很多领域都有着广泛的应用。
在设计履带式液压底盘时,需要进行匹配计算。
主要的匹配参数有:液压泵、液压马达、履带轮、驱动齿轮、履带板等。
这些参数的匹配关系对于履带式液压底盘的性能具有至关重要的影响。
首先是液压泵和液压马达的匹配。
液压泵的主要作用是提供液压系统所需的高压油,而液压马达则将高压油转化为机械能,驱动履带运动。
液压泵和液压马达的匹配需要考虑液压泵的流量和压力,以及液压马达的齿数和转速等因素。
通常情况下,液压泵的流量应该略大于液压马达的流量,以确保液压马达可以正常运行。
其次是履带轮和驱动齿轮的匹配。
履带轮是指履带底盘上的轮子,用于支撑履带和传递动力。
驱动齿轮则是履带底盘上的齿轮,用于驱动履带轮旋转,从而带动履带运动。
履带轮和驱动齿轮的匹配需要考虑它们的齿数和模数等因素。
通常情况下,齿数越多,传递动力越平稳,但同时也会增加摩擦损失,影响效率。
最后是履带板的匹配。
履带板是指履带底盘上的金属板条,它们连接在一起形成履带。
履带板的匹配需要考虑它们的重量和强度等因
素。
在选择履带板时,需要根据所需的承载能力和耐磨性等要求进行选择,以确保履带可以在恶劣环境下正常运行。
履带式液压底盘的匹配计算是一项复杂的工作,需要考虑多个因素的影响。
只有在合理匹配的基础上,履带式液压底盘才能发挥其最佳性能。
履带底盘的组成介绍及各参数的计算演示文稿
半刚性悬架中的履带架(图8-2)是行走系中一个很重要 的骨架,支重轮、张紧装置等都要安装在这个骨架上,它 本身的刚度对履带行走系的使用可靠性和寿命有很大影响。
刚度不足,作业时容易变形,引 起四轮(驱动轮、支重轮、导向轮、 托链轮)中心点不在同一垂直面内或 各轴线等 多种使用故障。
刚性悬架结构简单、适合于行走速度低,不经常行 走的工程机械。
履带架的传统形式:八字架式,如下图8-2所示。
半刚性悬架较刚性悬架能更好地适应地面的高低不平, 在松软不平地面接地压力较均匀,附着性能好。
半刚性悬架中的弹性元件能部分地缓和行驶时的冲击, 但其非弹性支承部分重量很大,高速行驶时冲击大,故其 行驶速度一般不超过15km/h。
2、遇障碍以全部功率驱动一侧履带强行转弯时,计算摆 动轴的受力和不利断面的应力。
四、履带 作用:履带用来将工程机械的重力传给地面并保证机械发 出足够的驱动力。
工作环境:经常在泥水中、凹凸不平地面、石质土壤中工 作,条件恶劣、受力情况不良,极易磨损。
弹性悬架:机架的全部重量经过弹性元件传递给履带架的 悬架。
弹性元件可以是弹性橡胶块、弹簧装置或油气悬架。
半刚性悬架:机架的重量一部分经过弹性元件、另一部分 经过刚性元件传递给履带架的悬架。如工业用履带拖拉机 之悬架。 刚性悬架:机架上的重量全部不经弹性元件传递到履带的 悬架。如单斗挖掘机其底架与履带架之间的悬架。
二、车架 型式:全梁式、半梁式两种。
全梁架式车架是一完整的框架,如东方红75拖拉机, Caterpillar后置发动机式装载机等采用这种全梁式车架。
半梁架式车架一部分是梁架,而另一部分则利用传动 系的壳体。这种车架广泛用于工程机械履带拖拉机中。
如图7-1为两根箱形纵梁和后桥桥体焊成一体,其前 部用横梁相连。
履带车辆设计计算说明书
整车参数计算根据《GB/T 3871.2-2006 农业拖拉机试验规程第2 部份:整机参数测量》标准要求进行计算:一、基本参数二、质量参数的计算1、整备质量M0为1825kg ;2、总质量M总M总=M0+M1+ M2 =1825+300+75=2200 kgM1载质量:300kg M2驾驶员质量:75kg3、使用质量:M总=M0+ M2 =1825+75=1900 kg4、质心位置根据《GB/T 3871.15-2006 农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0=830mm质心至前支承点的距离B=610mm 质心至地面的距离h0=450mm满载时:质心至后支承点的距离A0=605mm质心至前支承点的距离B=812mm 质心至地面的距离h0=546mm5、稳定性计算a 、保证拖拉机爬坡时不纵向翻倾的条件是:00h A >δ=0.7 (δ为滑转率)空载时:830/450=1.84>0.7 满载时:605/546=1.11>0.7 满足条件。
b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是:h a2>δ=0.7 a —轨距, a =1200mm h —质心至地面距离mm空载:12002450⨯=1.33>0.7 满载:12002546⨯=1.10>0.7故拖拉机在空、满载运行中均能满足稳定性要求。
三、发动机匹配根据《GB/T 1147.1-2007 中小功率内燃机第1 部份:通用技术条件》标准要求进行计算:XJ —782LT 履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标定功率为57kW/h ,转速为2600r/min.(1)最高设计车速V max =8 km/h ,所需功率:P emax =n1( p f + p w )kw m k V A C v f g m n max d max ⎥⎦⎤⎢⎣⎡⋅⋅+⋅⋅⋅=)()(761403600133122009.80.0280.9 1.4 1.1580.9360076140⎡⎤⨯⨯⨯⨯⨯⨯=+⎢⎥⎣⎦()() =6.188kW(2)根据柴油机全负荷速度特性,最大扭矩点的低速档行车速度V2=4km/h 。
履带底盘分类及结构性能特点

镇江市怡江化工有限公司履带底盘分类及结构性能特点履带底盘有着橡胶和钢类之分,当然在作业中的原理都是相同的。
设备在工作中动臂顶端加装副臂,副臂与动臂成一定夹角。
起升机构有主、副两卷扬系统,主卷扬系统用于动臂吊重,副卷扬系统用于副臂吊重。
然后通过内部配有低速大扭矩液压马达行走减速机,具有高通过性能。
基本机构是通过“凸”字形行走架,结构强度高、刚性强,然后再采用折弯加工。
使得支重轮、导向轮等关键配件采用深沟球轴承,一次性加黄油润滑,从而可以免除使用中的维护和保养,加油轴端双密封结构,还能够防止泥水进入轮腔。
下面就让我们来介绍下履带底盘的结构特点吧。
一、橡胶履带底盘的结构性能特点:1、能够支承主机重量,能够实现前进、后退转弯行走等功能。
2、橡胶履带大都采用日本技术生产的建筑机械型,所能承载能力、牵引力大大大增强,具有噪音低,而且不伤及柏油路面,具有良好的行驶性能。
3、配有内藏式低速大扭矩马达行走减速机,具有高通过性能。
4、采用支重轮、导向轮采用深沟球轴承,可以通过一次性加黄油润滑,免去使用中还需要中途维护和保养加油的烦恼。
5、轴端双密封结构,保证润滑油密封不外漏,并能有效的防止泥水进入轮腔。
6、选材合理且通过合金钢并经淬火处理后使得导向轮、驱动轮齿,耐磨性好,进而使得使用寿命变长。
弹簧涨紧机构彩螺杆调节,可靠性高为多节组装桁架结构,调整节数后可改变长度,其下端铰装于转台前部,顶端用变幅钢丝绳滑轮组悬挂支承,可改变其倾角。
而对于回转支承装在底盘上,可将转台上的全部重量传递给底盘,其上装有动力装置、传动系统、卷扬机、操纵机构、平衡重和机棚等。
动力装置通过回转机构可使转台作360°回转。
回转支承由上、下滚盘和其间的滚动件组成,可将转台上的全部重量传递给底盘,并保证转台的自由转动。
从而确保设备的正常运行和作业。
二、钢制履带底盘结构性能特点:1. 支承主机重量,具有前进、后退转弯行走之功能。
2.钢制履带采用日本技术生产的建筑机械型,承载能力、牵引力大,噪音低,不伤及柏油路面,具有良好的行驶性能。
履带车辆设计计算说明
整车参数计算根据《GB/T 3871.2-2006 农业拖拉机试验规程第2 部份:整机参数测量》标准要求进行计算:一、基本参数二、质量参数的计算1、整备质量M0为1825kg ;2、总质量M总M总=M0+M1+ M2 =1825+300+75=2200 kgM1载质量:300kg M2驾驶员质量:75kg3、使用质量:M总=M0+ M2 =1825+75=1900 kg4、质心位置根据《GB/T 3871.15-2006 农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0=830mm质心至前支承点的距离B=610mm 质心至地面的距离h0=450mm满载时:质心至后支承点的距离A0=605mm质心至前支承点的距离B=812mm 质心至地面的距离h0=546mm5、稳定性计算a 、保证拖拉机爬坡时不纵向翻倾的条件是:00h A >δ=0.7 (δ为滑转率)空载时:830/450=1.84>0.7 满载时:605/546=1.11>0.7 满足条件。
b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是:h a2>δ=0.7 a —轨距, a =1200mm h —质心至地面距离mm空载:12002450⨯=1.33>0.7 满载:12002546⨯=1.10>0.7故拖拉机在空、满载运行中均能满足稳定性要求。
三、发动机匹配根据《GB/T 1147.1-2007 中小功率内燃机第1 部份:通用技术条件》标准要求进行计算:XJ —782LT 履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标定功率为57kW/h ,转速为2600r/min.(1)最高设计车速V max =8 km/h ,所需功率:P emax =n1( p f + p w )kw m k V A C v f g m n max d max ⎥⎦⎤⎢⎣⎡⋅⋅+⋅⋅⋅=)()(761403600133122009.80.0280.9 1.4 1.1580.9360076140⎡⎤⨯⨯⨯⨯⨯⨯=+⎢⎥⎣⎦()() =6.188kW(2)根据柴油机全负荷速度特性,最大扭矩点的低速档行车速度V2=4km/h 。
履带机器人驱动计算new

履带驱动计算new
履带驱动计算
1.引言
履带是一种具有履带式底盘的,通过履带的运动驱动进行移动。
履带的驱动计算是指通过对履带的速度和转向角度进行计算,
控制在不同地形和环境中的移动。
2.底盘结构
履带底盘主要由履带、履带轮、驱动电机、转向机构等组成。
其中,履带是的运动部件,通过驱动电机的转动带动履带轮的转动,从而实现的移动。
转向机构则用于控制的转向。
3.履带速度计算
履带的速度是通过驱动电机的转速来控制的。
驱动电机的转速与的线速度之间存在一定的关系,可以通过以下公式进行计算:速度 = 转速轮子周长
4.转向角度计算
履带的转向角度取决于转向机构的设计。
一般而言,转向角度可以通过控制每个驱动电机的转速来实现。
在行驶过程中,如果
需要转向,则可以通过调整左右两侧驱动电机的转速差异来实现。
5.履带驱动控制算法
履带的驱动控制算法主要包括速度控制和转向控制两个方面。
在速度控制方面,可以使用PID控制算法来调整驱动电机的转速,
使得的速度稳定在预定值。
在转向控制方面,可以根据转向角度的
计算结果调整驱动电机的转速差异,从而实现的转向。
6.附件
本文档涉及的附件包括:
- 履带底盘结构图
- 履带驱动控制算法代码示例
7.法律名词及注释
本文涉及的法律名词及其注释如下:
- 速度:在单位时间内移动的距离。
- 转向角度:在转向时的旋转角度。
- PID控制算法:比例-积分-微分控制算法,常用于控制系
统中的稳定控制。
履带车辆设计计算说明

整车参数计算根据《GB/T 3871.2-2006 农业拖拉机试验规程第2 部份:整机参数测量》标准要求进行计算:一、基本参数二、质量参数的计算1、整备质量M0为1825kg ;2、总质量M总M总=M0+M1+ M2 =1825+300+75=2200 kgM1载质量:300kg M2驾驶员质量:75kg3、使用质量:M总=M0+ M2 =1825+75=1900 kg4、质心位置根据《GB/T 3871.15-2006 农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0=830mm质心至前支承点的距离B=610mm 质心至地面的距离h0=450mm满载时:质心至后支承点的距离A0=605mm质心至前支承点的距离B=812mm 质心至地面的距离h0=546mm5、稳定性计算a 、保证拖拉机爬坡时不纵向翻倾的条件是:00h A >δ=0.7 (δ为滑转率)空载时:830/450=1.84>0.7 满载时:605/546=1.11>0.7 满足条件。
b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是:h a2>δ=0.7 a —轨距, a =1200mm h —质心至地面距离mm空载:12002450⨯=1.33>0.7 满载:12002546⨯=1.10>0.7故拖拉机在空、满载运行中均能满足稳定性要求。
三、发动机匹配根据《GB/T 1147.1-2007 中小功率内燃机第1 部份:通用技术条件》标准要求进行计算:XJ —782LT 履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标定功率为57kW/h ,转速为2600r/min.(1)最高设计车速V max =8 km/h ,所需功率:P emax =n1( p f + p w )kw m k V A C v f g m n max d max ⎥⎦⎤⎢⎣⎡⋅⋅+⋅⋅⋅=)()(761403600133122009.80.0280.9 1.4 1.1580.9360076140⎡⎤⨯⨯⨯⨯⨯⨯=+⎢⎥⎣⎦()() =6.188kW(2)根据柴油机全负荷速度特性,最大扭矩点的低速档行车速度V2=4km/h 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
式中 B – 轨链节高度; D – 销子套外径; - 轨链节最小厚度。
轨链节的主要破坏形式仍为踏面磨损。
履带板宽度b由设计规定的机械平均单位接地压力Pp确定
b Gt 2 LP p
应处理好参数b和履带接地长度L的关系。窄而长的履带, 滚动阻力小(因土壤变形阻力较小),牵引附着性能较好, 但转向阻力较大。b/L之值一般为:
设计履带架时,要妥善确定履带架摆动轴线、驱动轮 轴线、导向轮轴线间的距离。
图8-3为TY150推土机行走系布置图。其履带架铰接中 心线与驱动轮轴线重合。
右图8-4为D10推土 机行走系布置图,其履 带架铰接中心线与驱动 轮轴线不重合。
现代结 构的半刚性 悬架履带拖 拉机中,广 泛采用平衡 梁,如右图 8-5所示。
图8-6之结构对履带防尘未考虑,这是其不足之处。在 D80A推土机轨链节的凹槽中各放置了一个防尘圈,这样 以来对于防止灰尘砂砾的进入很有效,使履带销和销子 套间的磨损大为减小,如下图8-7所示。
另一种密封式履带其结 构见右图8-8所示。
由于履带密封技术在实 践中卓有成效,国内外又研 制成功另一种密封润滑履带, 其结构见右图8-9所示。
二、车架 型式:全梁式、半梁式两种。
全梁架式车架是一完整的框架,如东方红75拖拉机, Caterpillar后置发动机式装载机等采用这种全梁式车架。
半梁架式车架一部分是梁架,而另一部分则利用传动 系的壳体。这种车架广泛用于工程机械履带拖拉机中。
如图7-1为两根箱形纵梁和后桥桥体焊成一体,其前 部用横梁相连。
1、节销式啮合:驱动轮轮齿与履带板的节销进行啮合。
这种啮合方式履带销所在的圆周近似地等于驱动轮 的节圆,驱动轮轮齿作用在节销上的压力通过履带销的 中心,如图8-6和8-7所示。
2、节齿式啮合:驱动轮轮齿与履带板上的节圆啮合,如 图8-13所示。
受力特征:履带销所在的圆周 比驱动轮的节圆大,轮齿给节 齿的作用力不通过履带销中心, 使履带销上作用有一个附加扭 矩,增加其负荷。
润滑密封履带特点:底盘的维修工作和费用减少,它使履 带销和销套间的接触表面形成一油膜层,从而可减少二者 的磨损,使寿命延长。履带销中心有储油孔,故可保持长 期润滑。此外,采用密封润滑履带还使履带噪音减小。
上面所讲的履带板均由几种零件组合而成,通常将这 种由几种零件组合而成的履带称为组合式履带。
组合式履带的优点:链轨节和支承板可以分别用不同的材 料制造,链轨节(履带节)常用易加工的中碳钢或中碳低 合金钢,因而容易将铰链作成封闭式使尘土不易进入,延 长履带的使用寿命。支承板用耐磨的特种合金钢轧制成型, 然后切断而成。此外当履带磨损后,只需根据具体情况单 独更换支承板或链轨节,不必一起更换。换用不同型式的 支承板,还可以使拖拉机进行不同的作业。
表8-1为美国公司装在DH-7G拖拉机上的各 种不同用途的履带板主要参数。
平面式履带板:对于主要不是提供牵 引力而是携带负荷运行的机器,又怕 抓土齿将地面破坏时,采用平面式履 带板。
特点:这种履带板有时在拖拉机、 装载机上采用,但不能提供足够的 牵引力,侧滑的可能性也比较大。
橡胶衬垫式履带板:在建筑物内或铺好的路面上作业履带 拖拉机上采用,它在路面上的牵引力比平面式履带板好, 对路面的破坏最小。 可换装式履带板:例如为了保护道路,可在一般的履带板 上用螺栓装上金属的或橡胶的衬垫,或者在平面或多石土 壤用履带板上用螺栓装上抓土齿。
履带的计算载荷:按机械在横坡上作业时,机重的75%由 下方履带承受,发动机提供给驱动轮以足够的扭矩,传到 此侧履带的最大驱动力Pmax为附着条件所限,即
Pmax=.0.75Gt
式中 - 附着系数,履带式机械初算时可取 =1; Gt – 推土机总重.
组合式履带由履带板、轨链节、履带销、销套、螺栓 等零件组成。
整体式履带板:其履带 板由高锰钢整块铸造而 成。东方红75拖拉机就 采用这种局长带板,其 结构见右图8-11。
特点:整体式履带板结构简单、制造方便、拆装容易、重 量较组合式履带板轻;但由于履带销与销孔间的间隙较大, 没有办法采用密封措施,泥砂很容易进入,使履带销和销 孔的磨损较快,且磨损后履带板只能整块更换,不适用于 重载的履带式工程机械和工业用拖拉机。
时,一侧履带引导轮上作用的P力为倒档时最大牵引力的 一半。
5、转向时,地面对于履带机械作用有转向阻力矩Mz,一 侧履带的转向阻力矩M为
M 1GL
2 4
式中L – 履带接地长度。 (二)、履带架的计算
要求:履带架应有足够的强度和刚度,使不易损坏或因变 形发生啃轨和脱轨。
履带架的纵梁在以下三种工况时受力最严重:
国外的履带式推土机很重视加强履带架的结构,使之坚固耐用,尤其注意 加强后托架(一般称作八字架的斜撑),增加其尺寸与壁厚并加以热处理,以承 受不良作业面引起的扭矩和振动。 (一)、悬架受力分析
与履带架有关的元件受力情况复杂,如半刚性悬架的履带架受以下力和力 矩作用:
1、机架经弹性元件作用到履带架上的重量G1,每一侧为0.5G1;
另外由于履带式工程机械速度不高,计算考虑的是其 最不利的情况,同时又忽略了斜撑的加强作用,故强度计 算只考虑了静载就可以了,但最好再校核其刚度。 (三)、平衡梁的计算
将平衡梁视为简支梁作强度计算。
平衡梁到驱动轮轴的纵向水平距离,一般为(0.65~ 0.72)L,L为引导轮轴到驱动轴的水平距离。
(四)、履带架摆动轴的计算 1、遇障碍以最大牵引力推土时,计算摆动轴的受力和不 利断面的应力;
多石土壤用履带板:有两条或三条低 而宽的抓土齿(如图所示三齿式), 与前者相比,其强度和耐磨性均有所 提高,因为履带板的磨损主要是抓土 齿磨损最快。
在抓土齿不能深入土层深处的 情况下,例如在坚实的多石土壤上作 业时,这种履带板保证了抓土齿的支承 面与土壤有较大的接触面积。但在粘 质土壤,这种履带板的附着系数比单 齿式约小10%左右。这种履带板适用 于履带式装载机。
寒冷地带冬季用履带板:其抓土齿的支承面上开有 缺口,中间开一个缺口为双刃式,两侧开两个缺口 为单刃式。
由于支承面面积减少,保证履齿陷入冰雪内, 从而提高了拖拉机的牵引附着性能。缺口只在抓土 爪的上端,因此它在粘砂土或砂粘土等土壤上作业 时,和一般用途的履带板几乎没有区别。为了使履 带板能够自净化,其支承面留有方孔。
2、机架经铰接轴刚性作用到悬架上的重力G2,每一侧为 0.5G2,显然机架以上的重量为G=G1+G2;
3、地面的重力反力,它在各轮上的分配,随地面情况而 变;
4、履带作用于引导轮的拉力,如设P为每边履带的张力, 引导轮受力可视为2P,则
ql 3 P
8f
式中 q – 履带单位长度的重力; l – 引导轮和第一个托链轮间的履带长度; f – 引导轮和第一个托轮间履带的垂度。 在倒档行驶时,履带作用于引导轮的拉力最大,这
履带底盘的组成介绍及各参数的 计算
第一节 铲土运输机械的履带式行走系
一、组成与特点
如右图8-1所示, 履带式拖拉机的行走 系由驱动轮1、履带2、 支重轮3、履带张紧装 置和导向轮5、托链轮 7以及连接支重轮和机 体的悬架等组成。
主要功能:
1、将由发动机传到驱动轮上的驱 动扭矩变为拖拉机在地面上的行走 移动(扭矩变成驱动力,转速变成车 辆移动速度.)。
2、支承拖拉机的全部重量。 特点:
1、履带拖拉机的驱动轮只卷绕履带而不在地面上滚动, 机器全部重量经支重轮压在多片履带板上,履带式机器 的牵引附着性能要好得多;
2、与同马力的轮式机器相比,由于履带支承面大,接地 压力小(一般小于0.1MPa),所以在松软土壤上的下陷深 度小,因而滚动阻力小,有利于发挥较大的牵引力;
特点:
3、履带销子、销套等运动副使用 中要磨损,要有张紧装置调节履带 张紧度,它兼起一定的缓冲作用。
4、履带式行走系重量大,运动惯性大,缓冲减振作用小, 结构中最好有某些弹性元件;
导向轮既是张紧装置的一部分,也引导履带正确卷绕, 但不能引导机器转向; 5、履带式行走系结构复杂,金属消耗多,磨损严重,维 修量大,运动速度受到限制。
每条履带都由几十 块履带板组成,如 右图8-6所示。
履带板由具有履齿的 支承板和两根导轨组 成。
履带销与前一块 履带板的后铰链孔采 用压配合,压入力均 为500~750kN。
销和销套之间具有间隙,可使两块履带板自由相对转 动。销套同时也是驱动轮驱动履带运转的节销。
工程机械用的履带一律采用轧制,以利于节省材料, 提高质量和批量生产。
一般来讲,销子的剪切、销与销套间的挤压、销子的 抗弯强度都不成问题,因为履带的主要破坏形式是磨损。
右图8-12所 示轨链节11、2-2、33断面处常 出现断裂。
断裂原因:有设计因素(如圆角半径过小、有应力集中 等),更重要的是热处理工艺不佳,没有消除应力集中或 者经热处理后反而产生微细裂纹。
验算轨链节的抗拉强度如下
2、遇障碍以全部功率驱动一侧履带强行转弯时,计算摆 动轴的受力和不利断面的应力。
四、履带 作用:履带用来将工程机械的重力传给地面并保证机械发 出足够的驱动力。
工作环境:经常在泥水中、凹凸不平地面、石质土壤中工 作,条件恶劣、受力情况不良,极易磨损。
要求:具有良好的附着性能、足够的强度、刚度和耐磨性, 重量尽可能轻。
由于铲土运输机械特别是履 带式推土机的作业环境恶劣,上 述结构车架的纵梁容易变形,因 此国内外很重视加强此类机械车 架的强度与刚度,故多采用箱形 断面的纵梁以增强其抗弯抗扭强 度,断面高度也适当增加。
三、悬架 悬架或悬挂:在工程机械中,机架(车架)与行走系之间 的连接装置。 三种悬挂:刚性悬架、半刚性悬架和弹性悬架。
1、履带式机械倒档越过沟渠,其全部重量支承在最前或 最后的一对支重轮上;
2、履带式机械倒档越过沟渠,其全部重量支承在引导轮 和驱动轮上;