力士乐驱动器设置原点
中文力士乐03系列DKC伺服驱动器参数手册
前言本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同行在不急需时参考。
在本说明书的后半部分,附有英文原版说明书,如遇到不能理解之词汇,读者可以再次翻译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中文说明书网上基本没有。
779K于2010年11月15日22时30分德国力士乐伺服驱动器参数说明书ECODRIVE03设备一般自动化本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999传输,以及本文件复制,商业使用或将其内容不得沟通无明确的书面许可。
违反这些规定将要求赔偿。
为实施专利或者发行版权所有注册外观设计。
(德国工业标准34-1)有效期保留所有权利就这个文件的内容和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885部完(OS/TH)注意:本文件印在无氯漂白纸。
总结文件 - 概述内容1一般资料1-1使用本手册............................................... ................................ 1-1定义................................................. ............................................ 1-22月2日至1日标准参数S - 0 - 0001,NC的周期时间(TNcyc )...................................... ................. 2-1S - 0 - 0002,SERCOS的周期时间(Tscyc )...................................... ..................................... 2-1S - 0 - 0003,最小的AT发送起始时间(T1min)....................... 2-1S - 0 - 0004,发送/接收转换时间(TATMT).................................... ................................ 2-1S - 0 - 0005,最小反馈采集时间(T4min )..................................... ............................ 2-2S - 0 - 0006,在传输开始时间(T1)..................................... ......................................... 2-2S - 0 - 0007,反馈收购启动时间(甲状腺素)..................................... .................................. 2-2S - 0 - 0008,命令的有效时间(T3)的...................................... ................................................. 2-3S - 0 - 0009,开始处理主数据电报...................................... ........................... 2-3S - 0 - 0010,长度主数据电报....................................... ............................................ 2-3S - 0 - 0011,1级诊断......................................... .................................................. ........... 2-3S - 0 - 0012,第2类诊断......................................... .................................................. ........... 2-4S - 0 - 0013,3级诊断......................................... .................................................. ........... 2-5S - 0 - 0014,接口状态.......................................... .................................................. ................. 2-6S - 0 - 0015电类型参数......................................... .................................................. .. 2-7S - 0 - 0016,自定义放大器电报配置清单....................................... ......................... 2-8S - 0 - 0017,国际化域名列表,所有业务数据列表..................................... ..................... .. 2-8S - 0 - 0018,国际化域名列表,对运行数据的CP2名单.................................... ............................... 2-8 S - 0 - 0019,国际化域名列表,为CP3运行数据清单.................................... ................................... 2-8 S - 0 - 0021,国际化域名列表,为商业无效运算数据列表。
如何设置数控机床的零点(原点)

如何设置数控机床的零点(原点)数控机床的机械零点是机床上的⼀个固定点,由安装在机床上的⾏程开关或接近开关决定(国产系统),通常情况下,这个开关安装在X向或Z向正⽅向的最⼤⾏程附近处。
⼀般数控机床的机械零点与机床的参考点重合(由⼀些参数决定),所以回机械零点就是回参考点。
执⾏了回机械零点操作,机床就回到了参考点,通常在这个位置进⾏换⼑和设定编程的机械零点。
机械零点(参考点)的设定⽅法有两种:⼀种为有挡块零点的设置;另⼀种为⽆挡块零点的设置。
加⼯中⼼请选择伯特利数控⼀、有挡块零点的设置⼀般数控系统都必须安装机械零点撞块,我们常⽤的是⽤⾏程开关检测伺服电机的⼀转信号,⽤⾏程开关时,我们以⼴数980TD系统为例说明,要使机械零点与机床参考点重合,需将参数机械零点的偏移数据No.114、No.115均设为0。
1、机械回零⽰意图1-1图1-1钻攻中⼼请选择伯特利数控注意:挡块安装在机床的滑板上,挡块的长度必须⼤于或等于25mm。
2、⼴数系统回零⽅式我们常⽤的⼴数系统回零⽅式有两种:⽅式B和⽅式C,当No.006号参数的第0位和第1位均设为0时,回零为⽅式B,状态参数No.005号参数的第5位为0时,减速信号低电平有效。
⽅式B时回零动作时序如下图1-3:CNC加⼯中⼼请选择伯特利数控⽅式B回机械零点的过程:a. 选择操作⽅式为回零⽅式,按⼿动正向或负向(回机械零点⽅向由系统参数决定,不同的系统参数不同,我们常⽤的⼴数980TD系统由No.183号参数决定)进给键,则相应轴以快速移动速度向机械零点⽅向运动,运⾏⾄压上减速开关,减速触点断开时,进给速度⽴即下降,以固定的低速继续运⾏。
b. 当减速开关释放后,减速信号触点重新闭合,CNC开始检测编码器的⼀转信号,如该信号电平跳变,则运动停⽌,同时操作⾯板上相应轴的回零结束指⽰灯亮,机械回零操作结束。
当No.6号参数的第0位和第1位均设为1时,状态参数No.005号参数的第5位为0时,减速信号低电平有效,为⽅式C回零,⽅式C回机械零点时序图如下1-4:⾼速加⼯中⼼请选择伯特利数控⽅式C回机械零点的过程:a. 选择操作⽅式为回零⽅式,按⼿动正向或负向(回机械零点⽅向由系统参数决定,我们常⽤的⼴数980TD系统⽤No.183号参数决定)进给键,则相应轴以快速移动速度向机械零点⽅向运动。
力士乐伺服参数设置(用于机床控制)

力士乐伺服参数设置摘要:文中简述了力世乐ECODRIVE03 伺服驱动系统通过并行接口进行位置块(组)操作模式(position block mode)的控制原理,并例举了与伺服驱动相关的故障及其解决方法。
数控机床控制中西门子、法那科伺服驱动系统应用较为普遍,而力世乐ECODRIVE03 伺服系统亦广泛地应用于机械制造、印刷造纸业、食品包装及集装总装等领域。
拥有FWA-ECODR3-SMT-02VS-MS 等系列硬件的ECODRIVE03 伺服系统通过串行、模拟、并行接口,及对系统标准参数(S 型参数)生产参数(P 型参数)的设置,可完成扭矩控制、速度控制、位置控制、插补控制、点动、位置块(组)及步进电机等模式的操作。
且系统带有测量、驱动、暂停、模拟输入/输出、数字输入/输出等多种基本功能并拥有完备的诊断功能。
下面介绍力世乐伺服系统的位置块(组)操作模式的控制原理。
1 位置块(组)操作模式的控制原理1.1 概述位置块(组)操作模式的控制原理位置块(组)操作模式是伺服系统以设定的速度、加速度等参数驱动电机运行到已在程序中预设的目标值的位置控制。
系统根据所处理的不同工艺过程(加工区域)最多可以设置64 个位置块(组)。
应用位置块(组)操作模式时,首先要对操作首要模式参数S-0-0032 进行设置,如设置为0000 0000 0011 х011 时,是通过编码器1 接口进行位置控制。
其中第3 位,bit3=0时代表位移滞后控制,bit3=1 时为无滞后控制;同时要将第二操作模式1 设置为点动模式,即设置参数S-0-0033 为1100 0000 0001 1011。
系统中与之相关的参数为:P-0-4006:加工块的目标位置值P-0-4007:加工块的速度值P-0-4008:加工块的加速度值P-0-4009:加工块的加加速度极值。
当设定为“0”时,极限值不起作用。
无论是绝对值还是相对值控制方式,P-0-4006、P-0-4007、P-0-4008、P-0-4009都有效,且每个参数都可最多设置为64 个数据,分别对应于0-63 数据块(组)的各个值。
力士乐驱动器使用说明教学文案

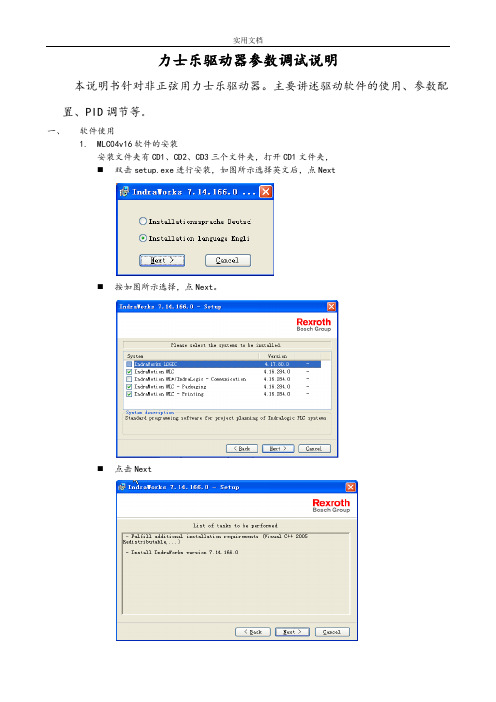
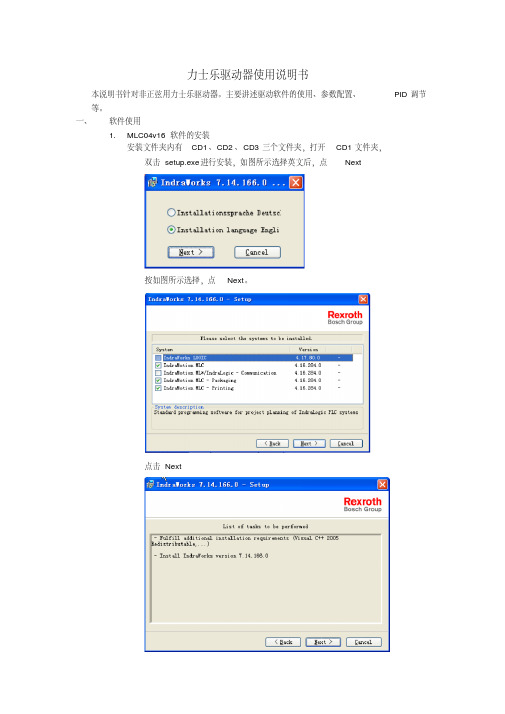
力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用1.MLC04v16软件的安装安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
Rexroth力士乐伺服电机如何调试

Rexroth力士乐伺服电机如何调试?德国Bosch Rexroth/力士乐伺服电机分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
Rexroth/力士乐伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
我们在购买回力士乐伺服电机后,要详细阅读说明书,然后根据说明书进行操作;安装前要对伺服电机进行检查是否完好无损,是否有部件遗漏等。
那么Rexroth力士乐伺服电机如何调试?在调试过程中应该注意哪些细节呢?下面博扬小编将为您介绍德国Bosch Rexroth/力士乐伺服电机的调试方法及步骤:Rexroth力士乐伺服电机一、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
比如,山洋是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
二、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置三、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
力士乐REXROTH伺服参数设置

力士乐REXROTH伺服参数设置文中简述了力世乐ECODRIVE03 伺服驱动系统通过并行接口进行位置块(组)操作模式(position block mode)的控制原理,并例举了与伺服驱动相关的故障及其解决方法。
数控机床控制中西门子、法那科伺服驱动系统应用较为普遍,而力世乐ECODRIVE03 伺服系统亦广泛地应用于机械制造、印刷造纸业、食品包装及集装总装等领域。
拥有FWA-ECODR3-SMT-02VS-MS 等系列硬件的ECODRIVE03 伺服系统通过串行、模拟、并行接口,及对系统标准参数(S 型参数)生产参数(P 型参数)的设置,可完成扭矩控制、速度控制、位置控制、插补控制、点动、位置块(组)及步进电机等模式的操作。
且系统带有测量、驱动、暂停、模拟输入/输出、数字输入/输出等多种基本功能并拥有完备的诊断功能。
下面介绍力世乐伺服系统的位置块(组)操作模式的控制原理。
1 位置块(组)操作模式的控制原理1.1 概述位置块(组)操作模式的控制原理位置块(组)操作模式是伺服系统以设定的速度、加速度等参数驱动电机运行到已在程序中预设的目标值的位置控制。
系统根据所处理的不同工艺过程(加工区域)最多可以设置64 个位置块(组)。
应用位置块(组)操作模式时,首先要对操作首要模式参数S-0-0032 进行设置,如设置为0000 0000 0011 х011 时,是通过编码器1 接口进行位置控制。
其中第3 位,bit3=0时代表位移滞后控制,bit3=1 时为无滞后控制;同时要将第二操作模式1 设置为点动模式,即设置参数S-0-0033 为1100 0000 0001 1011。
系统中与之相关的参数为:P-0-4006:加工块的目标位置值P-0-4007:加工块的速度值P-0-4008:加工块的加速度值P-0-4009:加工块的加加速度极值。
当设定为“0"时,极限值不起作用。
无论是绝对值还是相对值控制方式,P-0-4006、P-0-4007、P-0-4008、P-0-4009都有效,且每个参数都可最多设置为64 个数据,分别对应于0-63 数据块(组)的各个值。
博士力士乐 MSK和MAD系列绝对值电机零点设置

作者: 朱国锋
作者机构: 上海齐浩电气自动化有限公司,上海市嘉定区园区路151弄1区33号201814出版物刊名: 设备管理与维修
页码: 66-66页
年卷期: 2012年 第3期
主题词: 绝对值 电机 零点 设置 AD系列 MSK 博士 同步运动
摘要:需设置绝对值电机零点的几种情况:①绝对值电机零点第一次调试时。
②更换电机备件后。
③电机和机械负载之间没有同步运动.如同步皮带断裂,连轴器打滑等情况。
设置绝对值电机零点的方法很多,基本原理就是机械零位和电机编码器零位同步,满足加工工艺。
力士乐驱动器使用说明书
力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用1.MLC04v16软件的安装安装文件夹有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
力士乐驱动器使用说明

力士乐驱动器使用说明一、产品概述二、产品特点1.高性能:力士乐驱动器具有高精度、高效率、高可靠性等特点,能够满足各种机械设备运动控制的需求。
2.多功能:力士乐驱动器支持多种运动方式,如定速运动、变速运动、位置控制等。
3.易操作:力士乐驱动器配备了直观的人机界面,操作简单便捷,适用于不同的用户。
三、产品安装1.将力士乐驱动器和机械设备的电源断开。
2.将力士乐驱动器与机械设备连接,确保连接稳定可靠。
3.将力士乐驱动器连接到电源,确保电压和电流符合设备要求。
四、产品操作1.开机和关机:按下电源按钮,等待指示灯亮起表示开机,再次按下按钮即可关机。
2.运动模式选择:通过控制面板上的旋钮或按键,选择所需的运动模式。
3.运动参数设置:通过控制面板上的键盘或旋钮,设置运动参数,如速度、加速度、位置等。
4.运动控制:按下启动按钮,力士乐驱动器即开始执行设定的运动模式和参数。
5.报警处理:在使用过程中,如发生故障、运动超速、温度过高等异常情况,力士乐驱动器会自动发出报警声音并停止运动,此时需要及时处理故障并重启设备。
五、常见问题与解答1.为什么电机无法启动?答:请检查电源是否连接正常、电压是否稳定、电机是否接线正确,并确保输入端子的连线牢固可靠。
2.如何设置运动速度?答:进入运动参数设置界面,通过键盘或旋钮输入所需的速度值,并确认保存设置。
3.如何防止电机过热?答:力士乐驱动器会自动监测电机温度,在温度超过设定值时会发出报警并停止运行,此时请检查散热系统是否正常、风扇是否工作正常。
4.小范围精确位置如何控制?答:力士乐驱动器支持微调功能,通过微调按钮,可以对小范围内的位置进行精确调整。
六、产品维护1.定期检查:定期检查力士乐驱动器的电源线、电机接线、控制线等是否正常连接。
2.清洁保养:定期清洁驱动器表面的灰尘和污垢,保持产品的散热性能。
3.注意防潮防湿:力士乐驱动器应存放在干燥、通风的地方,避免受潮和受湿。
七、产品注意事项1.请遵循产品的使用说明,不要随意更改参数或进行不必要的操控。
力士乐简明调试
多轴伺服驱动与系统模块 轴3
编码器 轴4
主电源输入 制动电阻 轴2
CF 卡 以太网 HMI
SERCOSIII
11
Electric Drives and Controls | MY | 2010-07-26 | DCCN/SLC31 | © Bosch Rexroth AG 2011. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
12Leabharlann Electric Drives and Controls | MY | 2010-07-26 | DCCN/SLC31 | © Bosch Rexroth AG 2011. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
9
Electric Drives and Controls | MY | 2010-07-26 | DCCN/SFA2 | © Bosch Rexroth AG 2011. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
伺服电机原点设置方法

伺服电机原点设置方法
一、设置步骤:
1、连接伺服电机与操作系统:
选用伺服电机中的“RS-232”接口,连接电源,并将此接口直接插入系统上的串行接口中;
2、将伺服电机设置为原点:
操作系统上发送一条“强制原点”指令,此指令要求伺服电机将当前位置认定为原点;
3、初始化伺服电机:
操作系统上发送一条“初始化”指令,此指令要求伺服电机执行诸如减速度等工作。
二、常用的原点设置方法:
1、硬件原点设置:
利用电机与系统之间的连接以及一些参数,将伺服电机设置成具有特定位置的原点;
2、软件原点设置:
将伺服电机初始状态设定为舵机原点,通过改变舵机初始状态进行设置;
3、恒量原点设置:
首先将伺服电机运行到一个位置,然后录入此位置参数作为原点,只要控制器不改变该位置,那么伺服电机就会以该位置为原点运动。
力士乐驱动器使用说明.-共24页
与伺服启动器联机
打开工程后
变为
点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。 如果端口配置正常则直接联机,否则会弹出如下窗口。
点击 Scan for Device 后弹出如下窗口
式为虚拟主轴,实际位置。
。主轴模
5. MLD 配置
PLC has permanent control over the drive: 驱动器具备 PLC 功能 (可编程逻辑控制 ) 。 Motion errors at FB do not trigger any(axis) errors :在 FB 内发生的 motion 错误不触 发轴错误 Axisdata structure supported 支持程序内调用轴数据
从站地址。 波特率由主站决定 通讯周期 通讯看门狗时间 参数通道长度 实时数据通道 (驱动器向 PLC 一次可
命令数据通道 (PLC 向驱动器一次可
2. 轴设定 Scaling type: 选择 linear 直线轴。 Position data format:absolute 绝对位置
Maxinum travel range l: 360 mm
力士乐驱动器使用说明书
本说明书针对非正弦用力士乐驱动器。主要讲述驱动软件的使用、参数配置、
PID 调节
等。 一、 软件使用
1. MLC04v16 软件的安装 安装文件夹内有 CD1 、CD2 、 CD3 三个文件夹,打开 CD1 文件夹,
双击 setup.exe 进行安装,如图所示选择英文后,点 Next
8. 下载凸轮表 5,6,7,8 凸轮表 5,6,7,8 不能直接下载,需用如下方法下载 首先按如图所示保存为外部文件
力士乐伺服参数设置

力士乐伺服参数设置2010年12月24日星期五上午08:33摘要:文中简述了力世乐ECODRIVE03 伺服驱动系统通过并行接口进行位置块(组)操作模式(position block mode)的控制原理,并例举了与伺服驱动相关的故障及其解决方法。
数控机床控制中西门子、法那科伺服驱动系统应用较为普遍,而力世乐ECODRIVE03 伺服系统亦广泛地应用于机械制造、印刷造纸业、食品包装及集装总装等领域。
拥有FWA-ECODR3-SMT-02VS-MS 等系列硬件的ECODRIVE03 伺服系统通过串行、模拟、并行接口,及对系统标准参数(S 型参数)生产参数(P 型参数)的设置,可完成扭矩控制、速度控制、位置控制、插补控制、点动、位置块(组)及步进电机等模式的操作。
且系统带有测量、驱动、暂停、模拟输入/输出、数字输入/输出等多种基本功能并拥有完备的诊断功能。
下面介绍力世乐伺服系统的位置块(组)操作模式的控制原理。
1 位置块(组)操作模式的控制原理1.1 概述位置块(组)操作模式的控制原理位置块(组)操作模式是伺服系统以设定的速度、加速度等参数驱动电机运行到已在程序中预设的目标值的位置控制。
系统根据所处理的不同工艺过程(加工区域)最多可以设置64 个位置块(组)。
应用位置块(组)操作模式时,首先要对操作首要模式参数S-0-0032 进行设置,如设置为0000 0000 0011 х011 时,是通过编码器1 接口进行位置控制。
其中第3 位,bit3=0时代表位移滞后控制,bit3=1 时为无滞后控制;同时要将第二操作模式1 设置为点动模式,即设置参数S-0-0033 为1100 0000 0001 1011。
系统中与之相关的参数为:P-0-4006:加工块的目标位置值P-0-4007:加工块的速度值P-0-4008:加工块的加速度值P-0-4009:加工块的加加速度极值。
当设定为“0”时,极限值不起作用。
力士乐主油泵压力及恒功率调节方法力士乐主油泵压力及恒功率调节方法

力士乐主油泵压力及恒功率调节方法
一:主系统压力调整
1.把主阀块上的主溢流阀调节杆全部往外调松
2.如图一,把油泵上的主系统压力调节杆上的锁紧螺母松开,把调节螺杆往里调到底。
3.调节主阀块上的溢流阀当压力到34MPA时锁紧溢流阀调节杆上的锁紧螺母4.调松主油泵上油泵压力调节螺杆当压力在时锁紧调节杆上的锁紧螺母
二:恒功率阀调整
1.前提:换向压力调整到16MPA;
2.主油泵上的M1口装上测压接头,测压管与6MPA量程的测压表;
3.将主油泵上的恒功率螺钉拧紧到底
4.拔掉DT1插头,满排量打正泵;
5.观察测压表并慢慢调松恒功率螺钉,直到压力表指针在2-4MPA时锁紧恒功率螺钉锁紧螺母。
力士乐驱动器使用说明

力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用1.MLC04v16软件的安装安装文件夹有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。