halcon测量
halcon 四步相移法
halcon 四步相移法Halcon 四步相移法(Four-Step Phase-Shifting Method)是一种常用于光学相位测量和表面形貌分析的方法。
它基于干涉原理,通过改变输入光的相位来获得被测物体的相位信息,从而实现对物体形貌的测量和分析。
本文将以Halcon 四步相移法为主题,逐步解释该方法的原理和步骤,并探讨其在实际应用中的优势和应用领域。
第一步:原理介绍Halcon 四步相移法是一种使用干涉测量原理的相位测量方法。
干涉测量原理是通过将两束光线进行干涉,利用干涉光场的强度变化来获得被测物体的相位信息。
在Halcon 四步相移法中,通过改变输入光的相位,我们可以得到一系列互相差一个相位角的干涉图像。
通过对这些干涉图像进行综合分析和处理,可以得到被测物体的相位信息,从而实现对物体形貌的测量和分析。
第二步:步骤解析Halcon 四步相移法包含以下四个步骤:1. 步骤一:获取基准图像在这一步中,我们需要记录没有被测物体(或被测物体没有位移或变形)时的基准图像。
这个图像将被用作后续步骤中的参考图像,用于和其他相移图像进行比较和分析。
2. 步骤二:相位偏移在这一步中,我们需要调整输入光的相位,以获得一系列相移图像。
相位的调整可以通过改变光源的相位或使用相移元件(如全息片)来实现。
通常,我们需要获取至少三张相移图像,这样我们才能够计算出被测物体的相位信息。
3. 步骤三:相位计算在这一步中,我们使用相移图像序列来计算被测物体的相位信息。
根据相移量和相位偏移量的关系,我们可以通过简单的数学运算计算出物体的相位信息。
具体的计算公式根据实际应用的需求而有所变化,例如在表面形貌测量中,我们可以通过计算相移图像序列的频谱信息,来获得物体的相位信息。
4. 步骤四:相位重建在这一步中,我们使用得到的相位信息来重建被测物体的形貌。
具体的重建方法可以根据实际应用的需求而变化,例如在表面形貌测量中,我们可以使用相位解包算法来获得物体的三维形貌信息。
halcon学习笔记——实例篇(2)长度和角度测量
halcon学习笔记——实例篇(2)长度和⾓度测量实例⼆:长度和⾓度测量素材图⽚:halcon代码:1: *读取并截取图⽚2: dev_close_window()3: read_image (Image, 'D:/MyFile/halcon/长度和⾓度测量/图.png')4: crop_rectangle1 (Image, ImagePart, 75, 0, 400, 400)5: get_image_size (ImagePart, Width, Height)6: dev_open_window (0, 0, Width, Height, 'black', WindowHandle)7: dev_display (ImagePart)8:9: *获取图形的边界10: threshold (ImagePart, Regions, 0, 112)11:12: *分离三⾓形和圆形13: connection(Regions,ConnectedRegions)14: sort_region(ConnectedRegions,SortedRegions,'upper_left','true','column')15: select_obj(SortedRegions,Circle,1)16: select_obj(SortedRegions,Triangle,2)17:18: *获取三⾓形各边的信息19: skeleton(Triangle,TriangleSkeleton)20: gen_contours_skeleton_xld(TriangleSkeleton,TriangleContours,1,'filter')21: segment_contours_xld(TriangleContours,ContoursSplit,'lines_circles', 5, 4, 2)22: select_contours_xld(ContoursSplit,SelectedContours, 'contour_length',100, 999, -0.5, 0.5)23: fit_line_contour_xld (SelectedContours, 'tukey', -1, 10, 5, 2, RowBegin, ColBegin, RowEnd, ColEnd, Nr, Nc, Dist)24:25: *计算三⾓形⾓度26: angle_ll (RowBegin[0], ColBegin[0], RowEnd[0], ColEnd[0], RowBegin[1], ColBegin[1], RowEnd[1], ColEnd[1], Angle1)27: angle_ll (RowBegin[0], ColBegin[0], RowEnd[0], ColEnd[0], RowBegin[2], ColBegin[2], RowEnd[2], ColEnd[2], Angle2)28: angle_ll (RowBegin[1], ColBegin[1], RowEnd[1], ColEnd[1], RowBegin[2], ColBegin[2], RowEnd[2], ColEnd[2], Angle3)29: Angle1:=abs(deg(Angle1))30: Angle2:=abs(deg(Angle2))31: Angle3:=abs(deg(Angle3))32:33: *获取圆的信息34: area_center(Circle,AreaCircle, RowCircle, ColumnCircle)35:36: *计算圆⼼到三⾓形各边的距离37: Distance := []38:for Index := 0 to 2 by 139: distance_pl (RowCircle, ColumnCircle, RowBegin[Index], ColBegin[Index], RowEnd[Index], ColEnd[Index], ThisDistance)40: Distance := [Distance,ThisDistance]41: endfor。
halcon measure_pos参数说明
halcon measure_pos参数说明全文共四篇示例,供读者参考第一篇示例:Halcon是一款强大的机器视觉软件工具,广泛应用于工业自动化、检测、识别等领域。
其中measure_pos是Halcon中一个重要的参数,用于位置测量和定位。
本文将详细介绍measure_pos的参数说明和用法,帮助读者更好地理解和应用该参数。
1. 参数说明measure_pos是Halcon中用于位置测量的函数,主要用于检测图像中的边缘、线条或者特征点,并得到其位置信息。
其效果类似于寻找图像中的标志物,帮助机器视觉系统完成位置识别和测量任务。
该函数的基本语法为:measure_pos(Image, RowEdge, ColumnEdge, ROI, Row, Column)Image表示输入的图像,RowEdge和ColumnEdge表示边缘的坐标,ROI表示感兴趣区域,Row和Column表示目标位置的坐标。
2. 参数用法measure_pos函数主要用于以下几个方面:(1) 边缘检测:通过measure_pos函数可以检测图像中的边缘,找到边缘的位置信息。
这对于工业检测、定位等任务非常有用。
(2) 线条检测:除了边缘检测,measure_pos还可以用于检测图像中的线条或者特定形状的目标。
通过调整参数,可以实现不同精度和角度的线条检测。
(3) 特征点定位:在某些场景下,需要定位图像中的特征点或者关键点,比如机器人视觉导航、医学影像识别等。
通过measure_pos函数可以精确定位这些特征点的位置。
3. 参数调节measure_pos函数有多个参数可以调节,以适应不同的应用场景和需求:(1) ROI参数:可以设置感兴趣区域,限定检测的范围,提高检测速度和准确性。
(2) 参数设置:可以根据具体情况设置边缘检测的阈值、灰度差异等参数,以获得最佳的检测结果。
(3) 精度和速度:根据实际需求可以调节参数,平衡检测的精度和速度,使检测适应不同的应用场景。
机器视觉之halcon入门(8)-一文弄懂如何用相机测量物体长度
机器视觉之halcon入门(8)-一文弄懂如何用相机测量物体长度第三节测量3.3.1 简单的啰嗦几十句所谓的测量,主要是测量出物理尺寸,就是我们现实中所说的尺寸。
毕竟算出像素尺寸实在是不是太难。
Halcon里面的物理尺寸测量分1d,2d,3d测量,作为入门书籍我们这儿只讲1d的,就是长度测量。
比如咱们的标定板长度的测量。
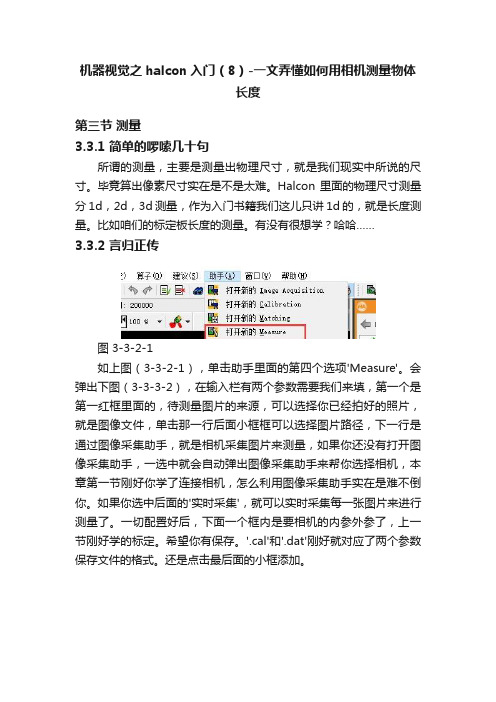
有没有很想学?哈哈……3.3.2 言归正传图 3-3-2-1如上图(3-3-2-1),单击助手里面的第四个选项'Measure'。
会弹出下图(3-3-3-2),在输入栏有两个参数需要我们来填,第一个是第一红框里面的,待测量图片的来源,可以选择你已经拍好的照片,就是图像文件,单击那一行后面小框框可以选择图片路径,下一行是通过图像采集助手,就是相机采集图片来测量,如果你还没有打开图像采集助手,一选中就会自动弹出图像采集助手来帮你选择相机,本章第一节刚好你学了连接相机,怎么利用图像采集助手实在是难不倒你。
如果你选中后面的'实时采集',就可以实时采集每一张图片来进行测量了。
一切配置好后,下面一个框内是要相机的内参外参了,上一节刚好学的标定。
希望你有保存。
'.cal'和'.dat'刚好就对应了两个参数保存文件的格式。
还是点击最后面的小框添加。
图 3-2-2-2一切配置好后,就可以进入第二页选项卡如下图:此时你halcon 的图像窗口应该是在实时显示的图片。
把标定板放进视野中,如下图(3-3-2-3)。
图 3-3-2-3图 3-3-2-4然后选择上图(3-3-2-4)中最上你们的小方框,这是画直线的功能,到halcon图像窗口中画一条测量的线,保证这条线穿过要测量的物体的两个边缘,如下图(3-3-2-5):图 3-3-2-5通常情况下,还是要调整下上图(3-3-2-4)中红框框内的三种参数:最小边缘幅度,意思是说halcon自己沿着线路找边缘,当某个地方灰度值差大于这个幅度的时候就认为它为边缘。
halcon 测距方法

halcon 测距方法
Halcon是一个强大的机器视觉软件库,提供了多种测距方法。
以下是一些常见的测距方法:
1. 边缘测距:通过提取物体的边缘信息,计算边缘之间的距离。
2. 模板匹配:将待测物体与标准模板进行匹配,计算两者之间的距离。
3. 特征提取:提取物体的特征点,利用特征点之间的几何关系计算距离。
4. 相位测量:利用相位差来计算物体之间的距离。
5. 立体视觉:通过两个或多个相机从不同角度拍摄图像,通过立体匹配算法计算物体之间的距离。
这些方法可以根据不同的应用场景和需求选择使用。
例如,在工业自动化领域中,可以使用边缘测距和模板匹配来检测生产线上的零件位置和尺寸;在医疗领域中,可以使用立体视觉和特征提取方法来测量器官和组织的大小和形状。
halcon测量一个圆的直径

halcon测量一个圆的直径要测量一个圆的直径,可以先通过阈值筛选出黑色部分threshold (Rim, Dark, 0, 128),然后将选中部分组合connection (Dark, DarkRegions),选择其中类圆度高的部分根据选中部分与圆的相似度筛选出圆型部分select_shape (DarkRegions, Circles, ['circularity','area'], 'and', [0.85,50], [1.0,99999]),然后选择将所选的类圆区域扩大8.5个像素点作为一个区域,缩小8.5个像素点作为一个区域,然后将连个区域合并,去两个区域不同的部分,那么这个圆区域的边缘就在这个合并区域中,算子如下:dilation_circle (Circles, ROIOuter, 8.5)erosion_circle (Circles, ROIInner, 8.5)difference (ROIOuter, ROIInner, ROI)union1 (ROI, ROIEdges)这时我们在用算子edges_sub_pix (RimReduced, Edges, 'lanser2', 0.3, 10, 20)提取其边缘轮廓。
用一个椭圆去近似它(这个圆形区域毕竟不是真正的圆,需要进行拟合)fit_ellipse_contour_xld (RelEdges, 'ftukey', -1, 2, 0, 200, 3, 2, Row, Column, Phi, Ra, Rb, StartPhi, EndPhi, PointOrder)从而得到这个区域的中点坐标 Row, Column,与x轴的角度Phi,半长轴Ra,半短轴Rb,开始角度StartPhi,结束角度EndPhi,这是就可以计算圆的近似半径了。
halcon双目测距原理

halcon双目测距原理摘要:一、引言二、Halcon双目测距原理1.双目视觉基本概念2.双目测距的计算方法3.Halcon软件在双目测距中的应用三、Halcon双目测距的实际应用1.自动驾驶2.机器人视觉3.无人机导航四、Halcon双目测距的发展趋势与挑战1.提高测距精度2.应对复杂环境3.与其他深度估计算法的比较五、总结正文:一、引言随着计算机技术、图像处理技术和人工智能技术的快速发展,双目测距技术在众多领域得到了广泛应用。
Halcon作为一款功能强大的图像处理软件,也在双目测距领域发挥着重要作用。
本文将详细介绍Halcon双目测距的原理及其在实际应用中的表现。
二、Halcon双目测距原理1.双目视觉基本概念双目视觉系统是指通过两个相机从不同的角度拍摄同一场景,然后通过计算机处理这两幅图像来获取场景中物体的三维信息。
2.双目测距的计算方法双目测距主要利用视差原理,通过比较两幅图像中的对应点,计算出物体在空间中的距离。
3.Halcon软件在双目测距中的应用Halcon提供了丰富的图像处理功能,包括图像预处理、特征提取、匹配以及三维重建等,为双目测距提供了强大的支持。
三、Halcon双目测距的实际应用1.自动驾驶Halcon双目测距技术可以实时获取车辆周围环境的三维信息,为自动驾驶提供可靠的安全保障。
2.机器人视觉双目测距技术在机器人领域也有广泛应用,如导航、抓取、避障等任务,都需要准确获取物体的距离信息。
3.无人机导航无人机在执行任务时,需要实时获取地形和障碍物的三维信息,Halcon双目测距技术可以帮助无人机实现这一目标。
四、Halcon双目测距的发展趋势与挑战1.提高测距精度随着深度学习技术的发展,可以通过深度神经网络对双目测距结果进行优化,提高测距精度。
2.应对复杂环境在复杂环境下,如强光照、遮挡、纹理缺失等情况下,双目测距的性能会受到影响,需要研究针对性的解决方案。
3.与其他深度估计算法的比较Halcon双目测距技术需要与其他深度估计算法进行比较,以找到最适合特定应用场景的解决方案。
Halcon摄像头角点检测的几种基本方法

角點檢測的幾種基本方法 .角點檢測(Corner Detection)是計算機視覺系統中用來獲得圖像特徵的一種方法,廣泛應用於運動檢測、圖像匹配、視頻跟蹤、三維建模和目標識別等領域中。
也稱為特徵點檢測。
角點通常被定義為兩條邊的交點,更嚴格的說,角點的局部鄰域應該具有兩個不同區域的不同方向的邊界。
而實際應用中,大多數所謂的角點檢測方法檢測的是擁有特定特徵的圖像點,而不僅僅是「角點」。
這些特徵點在圖像中有具體的坐標,並具有某些數學特徵,如局部最大或最小灰度、某些梯度特徵等。
現有的角點檢測算法並不是都十分的魯棒。
很多方法都要求有大量的訓練集和冗餘數據來防止或減少錯誤特徵的出現。
角點檢測方法的一個很重要的評價標準是其對多幅圖像中相同或相似特徵的檢測能力,並且能夠應對光照變化、圖像旋轉等圖像變化。
Moravec角點檢測算法Moravec角點檢測算法是最早的角點檢測算法之一。
該算法將角點定義為具有低「自相關性」的點。
算法會檢測圖像的每一個像素,將像素周邊的一個鄰域作為一個patch,並檢測這個patch和周圍其他patch的相關性。
這種相關性通過兩個patch間的平方差之和(SSD)來衡量,SSD值越小則相似性越高。
如果像素位於平滑圖像區域內,周圍的patch都會非常相似。
如果像素在邊緣上,則周圍的patch在與邊緣正交的方向上會有很大差異,在與邊緣平行的方向上則較為相似。
而如果像素是各個方向上都有變化的特徵點,則周圍所有的patch都不會很相似。
Moravec會計算每個像素patch和周圍patch的SSD最小值作為強度值,取局部強度最大的點作為特徵點。
Harris角點檢測算法Moravec角點檢測算法有幾個很明顯的缺陷:1,強度值的計算並不是各向同性的,只有離散的8個45度角方向被考慮。
因為patch的評議比較最多只有8個方向;2,由於窗口是方形並且二元的,因此相應函數會有噪聲;3,對邊緣的相應太簡單,因為強度值盡取SSD的最小值;FAST角點檢測算法Smith 和Brady在1997年提出了一種完全不同的角點提取方法,即「SUSAN (Smallest UnivalueSegment AssimilatingNucleus)」提取算子。
HALCON编程及工程应用 第9章 HALCON测量

不同的是,它使用模糊函数来判断和选择边缘对 ➢ fuzzy_measure_pairing:提取垂直于矩形或扇环的直边对。提取算法与
fuzzy_measure_pairs相同,但其可以使用参数Pairing提取彼此相交或者包含 的边缘对。 ➢ reset_fuzzy_measure:重置一个模糊函数
轮廓处理
轮廓处理适用于高精度测量,可提取像素精度边缘或者亚像素精度的边 缘,其主要包括5个步骤:(1)创建轮廓;(2)选择轮廓;(3)分割轮廓; (4)利用已知形状拟合轮廓段;(5)提取未知轮廓的特征。
1.创建轮廓
轮廓处理从轮廓的创建开始,获取轮廓的常用方法是提取边缘。边缘是一张图片中 亮暗区域的过渡位➢ gen_measure_rectangle2:通过一个矩形创建一个线性测量对象 ➢ gen_measure_arc:通过一个圆弧创建一个扇环测量对象 ➢ measure_pos:提取测量区域内垂直于矩形或者扇环的边缘 ➢ measure_pairs:提取测量区域内垂直于矩形或者扇环的边缘对 ➢ measure_thresh:提取测量区域内轮廓线上具有指定灰度值的点 ➢ measure_projection:提取测量区域内投影线上的一维灰度值分布
HALCON编程基础与工程应用
9.3HALCON二维测量
2.区域分割算子
➢ threshold;binary_threshold;auto_threshold;dyn_threshold;fast_threshold和 local_threshold:分割出感兴趣的区域;
halcon 曲线轨迹测量宽度

Halcon 曲线轨迹测量宽度近年来,随着工业自动化水平的不断提高,机器视觉技术在工业生产中的应用也越来越广泛。
其中,Halcon 曲线轨迹测量宽度技术作为机器视觉领域的热门话题之一,得到了众多企业和研究机构的关注和应用。
本文将重点围绕Halcon 曲线轨迹测量宽度技术展开详细解读,希望能够为相关研究人员和工程师提供一些帮助和启发。
一、Halcon 曲线轨迹测量宽度技术简介1.1 Halcon 简介Halccon是一款由德国MVTec公司推出的先进机器视觉软件。
该软件集成了丰富的图像处理算法和工具库,可以帮助用户快速高效地实现各种机器视觉应用。
Halcon曲线轨迹测量宽度技术就是该软件的一项重要功能之一。
1.2 曲线轨迹测量宽度技术概述曲线轨迹测量宽度技术是指利用机器视觉技术对目标物体的曲线轨迹进行测量和分析,从而获取其宽度信息。
这项技术通常应用于工业生产中对线条、管道、边缘等曲线结构的测量和检测。
二、Halcon 曲线轨迹测量宽度技术原理2.1 曲线提取针对目标物体的曲线轨迹,首先需要对其进行曲线提取,将其从图像中单独分离出来,为后续的宽度测量做准备。
2.2 宽度测量算法Halcon提供了多种用于曲线宽度测量的算法,包括直线测量、曲线拟合等。
这些算法可以基于目标曲线的特征和形状进行精确的宽度测量,保证测量结果的准确性和稳定性。
三、Halcon 曲线轨迹测量宽度技术应用3.1 工业自动化在工业生产中,往往需要对产品的曲线结构进行测量和检测,以确保产品质量和生产效率。
Halcon曲线轨迹测量宽度技术可以应用于自动化生产线上,实现对产品曲线结构的实时测量和分析。
3.2 医疗影像在医疗影像领域,Halcon曲线轨迹测量宽度技术也可以用于对医学影像中的血管、器官边缘等曲线结构进行测量和分析,帮助医生进行诊断和治疗。
四、Halcon 曲线轨迹测量宽度技术的优势4.1 高精度Halcon曲线轨迹测量宽度技术采用先进的图像处理算法和测量工具,能够实现高精度的曲线宽度测量。
opencv和halcon尺寸测量原理

尺寸测量是图像处理中一个非常重要的应用领域。
在工业生产和质量检测过程中,经常需要对产品的尺寸进行精确测量,以确保产品质量和生产效率。
在图像处理软件中,opencv和halcon是两个常用的工具库,它们提供了丰富的功能和算法来实现尺寸测量。
本文将对opencv和halcon中尺寸测量的原理进行介绍和比较。
一、opencv尺寸测量原理1.1 图像预处理在进行尺寸测量之前,首先需要对图像进行预处理,以增强图像的对比度和清晰度。
opencv提供了丰富的图像处理算法,如灰度化、边缘检测、直方图均衡化等,可以帮助我们处理图像,为后续的尺寸测量做好准备。
1.2 边缘检测在进行尺寸测量时,通常需要先检测出物体的边缘,以便精确测量其尺寸。
opencv中提供了多种边缘检测算法,如Canny边缘检测、Sobel算子等,可以帮助我们快速准确地检测出物体的边缘。
1.3 尺寸测量算法opencv中提供了多种尺寸测量算法,如霍夫变换、轮廓检测等。
这些算法可以帮助我们在图像中检测出物体的轮廓,并进行精确的尺寸测量。
通过这些算法,我们可以获取到物体的长度、宽度、周长等尺寸信息。
1.4 结果显示在完成尺寸测量之后,通常需要将结果显示出来,以便用户查看和分析。
opencv提供了丰富的图形界面功能,可以帮助我们将尺寸测量的结果直观地呈现出来,方便用户进行后续处理和分析。
二、halcon尺寸测量原理2.1 图像预处理和opencv类似,halcon也需要对图像进行预处理,以增强图像的对比度和清晰度。
halcon提供了丰富的图像处理算法,如灰度转换、滤波、形态学运算等,可以帮助我们处理图像,为尺寸测量做好准备。
2.2 边缘检测halcon中同样提供了多种边缘检测算法,如sobel过滤器、拉普拉斯过滤器等。
这些算法可以帮助我们快速准确地检测出物体的边缘,为后续的尺寸测量提供支持。
2.3 尺寸测量算法halcon中也提供了多种尺寸测量算法,如FindShapeModel、MeasurePos和Distance_Ncc等。
Halcon二维测量_内外卡尺
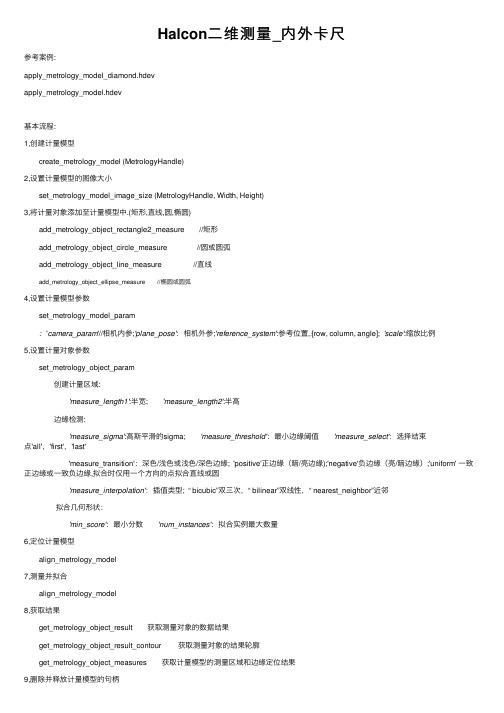
Halcon⼆维测量_内外卡尺参考案例:apply_metrology_model_diamond.hdevapply_metrology_model.hdev基本流程:1,创建计量模型 create_metrology_model (MetrologyHandle)2,设置计量模型的图像⼤⼩ set_metrology_model_image_size (MetrologyHandle, Width, Height)3,将计量对象添加⾄计量模型中.(矩形,直线,圆,椭圆) add_metrology_object_rectangle2_measure //矩形 add_metrology_object_circle_measure //圆或圆弧 add_metrology_object_line_measure //直线 add_metrology_object_ellipse_measure //椭圆或圆弧4,设置计量模型参数 set_metrology_model_param : 'camera_param'//相机内参;'plane_pose':相机外参;'reference_system':参考位置,:[row, column, angle]; 'scale':缩放⽐例5,设置计量对象参数 set_metrology_object_param 创建计量区域: 'measure_length1':半宽; 'measure_length2':半⾼ 边缘检测: 'measure_sigma':⾼斯平滑的sigma; 'measure_threshold':最⼩边缘阈值 'measure_select':选择结束点'all','first','last' 'measure_transition':深⾊/浅⾊或浅⾊/深⾊边缘; 'positive'正边缘(暗/亮边缘);'negative'负边缘(亮/暗边缘);'uniform' ⼀致正边缘或⼀致负边缘,拟合时仅⽤⼀个⽅向的点拟合直线或圆 'measure_interpolation':插值类型; “ bicubic”双三次,“ bilinear”双线性,“ nearest_neighbor”近邻 拟合⼏何形状: 'min_score':最⼩分数 'num_instances':拟合实例最⼤数量 6,定位计量模型 align_metrology_model7,测量并拟合 align_metrology_model8,获取结果 get_metrology_object_result 获取测量对象的数据结果 get_metrology_object_result_contour 获取测量对象的结果轮廓 get_metrology_object_measures 获取计量模型的测量区域和边缘定位结果9,删除并释放计量模型的句柄 clear_metrology_modelread_image (Diamond01, 'diamond_01.png')get_image_size (Diamond01, Width, Height)dev_set_line_width (3)*1⽣成计量模板create_metrology_model (MetrologyHandle)*2设置计量模型图像⼤⼩set_metrology_model_image_size (MetrologyHandle, Width, Height)*3添加计量⼏何形状* gen_region_line (ROI_0, 153.146, 402.104, 297.938, 223.979)* gen_region_line (TMP_Region, 152.104, 398.458, 272.938, 555.75)lineRBegin:=[153,152]lineCBegin:=[402,398]lineREnd:=[297,272]lineCEnd:=[223,555]add_metrology_object_line_measure (MetrologyHandle, lineRBegin, lineCBegin, lineREnd, lineCEnd, 20, 5, 1, 30, [], [], LineIndex) *4设置计量模型参数set_metrology_model_param (MetrologyHandle, 'reference_system', [160,400,0])*set_metrology_object_param (MetrologyHandle, 'all', 'num_instances', 2)list_files ('E:/Halcon/Halcon练习/Week 04/day 01/diamond', ['files','follow_links'], ImageFiles)tuple_regexp_select (ImageFiles, ['\\.(tif|tiff|gif|bmp|jpg|jpeg|jp2|png|pcx|pgm|ppm|pbm|xwd|ima|hobj)$','ignore_case'], ImageFiles) for Index := 0 to |ImageFiles| - 1 by 1read_image (Image, ImageFiles[Index])gen_rectangle1 (ROI_0, 69.8125, 173.979, 251.063, 628.146)reduce_domain (Image, ROI_0, ImageReduced)threshold (ImageReduced, Regions, 173, 255)get_region_points (Regions, Rows, Columns)*5计量模型定位align_metrology_model (MetrologyHandle, Rows[0], Columns[0], 0)*6测量应⽤apply_metrology_model (ImageReduced, MetrologyHandle)*7获得结果get_metrology_object_result (MetrologyHandle, 'all', 'all', 'result_type', 'all_param', Parameter)get_metrology_object_result_contour (Contour, MetrologyHandle, 'all', 'all', 1.5)dev_display (Image)dev_display (Contour)stop ()endforclear_metrology_model (MetrologyHandle)。
halcon测量空间点到直线的算子
Halcon测量空间点到直线的算子1. 简介Halcon是一种强大的机器视觉库,提供了丰富的图像处理和测量算法。
本文将介绍Halcon中用于测量空间点到直线的算子。
2. 算法原理测量空间点到直线的算法基于点到直线的距离公式。
给定一个空间点和一条直线,可以通过计算点到直线的距离来测量它们之间的关系。
点到直线的距离公式为:distance = |(a * x + b * y + c) / sqrt(a^2 + b^2)|其中,(x, y)是点的坐标,a和b是直线的方向向量,c是直线的截距。
3. Halcon中的测量算子Halcon提供了多个用于测量空间点到直线的算子,包括distance_pl、distance_pl_dist和distance_pl_points。
3.1 distance_pldistance_pl算子用于计算点到直线的距离。
它接受直线的参数和点的坐标作为输入,并返回点到直线的距离。
示例代码如下:gen_parallel_line (Line, X1, Y1, X2, Y2)distance_pl (Line, PointX, PointY, Distance)其中,gen_parallel_line用于生成一条直线,Line是直线的参数,(X1, Y1)和(X2, Y2)是直线上的两个点的坐标,PointX和PointY是点的坐标,Distance是点到直线的距离。
3.2 distance_pl_distdistance_pl_dist算子用于计算一组点到直线的距离。
它接受直线的参数和点的坐标数组作为输入,并返回每个点到直线的距离。
示例代码如下:gen_parallel_line (Line, X1, Y1, X2, Y2)distance_pl_dist (Line, PointsX, PointsY, Distances)其中,PointsX和PointsY是点的坐标数组,Distances是点到直线的距离数组。
halcon测量弧长的算子

halcon测量弧长的算子Halcon中测量弧长的算子是ContourLengthXld,可以用来测量输入的XLD对象的弧长。
代码示例:```ContoursLengthXld (Contours: XLDCont, Length: Num)```参数说明:- Contours: 输入的XLD对象,可以是边缘轮廓(contour)、圆弧(arc)、曲线轮廓等。
- Length: 返回测量得到的弧长。
示例代码:```read_image (Image, 'image.jpg')rgb1_to_gray (Image, ImageGray)threshold (ImageGray, Region, 128, 255)connection (Region, ConnectedRegions)select_shape_std (ConnectedRegions, SelectedRegions,'compactness', 'and', 50, 99999)reduce_domain (Image, SelectedRegions, ImageReduced) binomial_filter (ImageReduced, ImageFiltered, 4, 4)dyn_threshold (ImageFiltered, RegionDynThresh, 20, 'light') connection (RegionDynThresh, RegionDynThreshConnected) sort_region (RegionDynThreshConnected, RegionDynThreshSorted, 'character', 'true', 'row')gen_contours_skeleton (RegionDynThreshSorted, RegionSkeleton, 'lines', 2, 'max_parallel_variation', 80, 'max_dissimilarity', 2)reduce_domain (RegionDynThreshSorted, RegionReduced, RegionDynThreshSorted)select_shape (RegionReduced, SelectedContours, ['compactness'], 'and', [2], [18])ContoursLengthXld (SelectedContours, Length)```这是一个使用ContourLengthXld来测量弧长的示例代码。
halcon一维测量原理详解

halcon一维测量原理详解
Halcon是一种强大的机器视觉软件,用于图像处理和分析。
在Halcon中,一维测量是指利用图像处理技术对物体的一维尺寸进行测量和分析。
一维测量原理涉及到图像获取、预处理、特征提取和测量计算等多个方面。
首先,图像获取是一维测量的第一步。
在Halcon中,图像可以通过相机或者其他图像采集设备进行获取。
获取的图像需要保证清晰度和对比度足够,以便后续的处理和分析。
其次,预处理是一维测量的关键步骤之一。
在预处理阶段,图像可能需要进行灰度校正、滤波、边缘增强等操作,以减少噪声和突出目标的特征。
接着,特征提取是进行一维测量的重要步骤。
Halcon提供了丰富的特征提取工具,如边缘检测、轮廓提取等,以便从图像中提取出需要的特征信息,为后续的测量计算做准备。
最后,测量计算是一维测量的核心步骤。
在Halcon中,可以利用提取的特征信息进行测量计算,如长度、宽度、直径等一维尺寸
的测量。
Halcon提供了丰富的测量工具和算法,以满足不同场景下的测量需求。
总的来说,Halcon一维测量的原理涉及图像获取、预处理、特征提取和测量计算等多个环节,通过这些环节的有机组合,可以实现对物体一维尺寸的准确测量和分析。
希望这个回答能够帮助你更好地理解Halcon一维测量的原理。
halcon中gen_measure_rectangle的测量原理

halcon中gen_measure_rectangle的测量原理
在Halcon中,gen_measure_rectangle是一个用于一维测量的算子,它产生测量对象的句柄,准备提取垂直于仿射矩形的直边。
其测量原理是基于图像处理和计算机视觉的技术。
具体来说,gen_measure_rectangle的工作流程可能包括以下步骤:
1. 采集图像:这可能涉及使用相机或扫描设备获取图像。
2. 生成矩形测量区域:通过使用gen_measure_rectangle算子,在图像中定义一个矩形区域,该区域将用于进行测量。
3. 边缘测量:在矩形区域中进行边缘检测,以识别和测量对象的边界。
这可能涉及使用诸如边缘检测算法的技术。
4. 可视化显示:最后,通过可视化技术,将测量结果显示在图像上。
这可能涉及将测量的边缘线或其它特征以某种方式标记在图像上。
至于具体的实现原理,可能涉及图像处理中的一些高级技术,例如边缘检测、特征提取、直线拟合等。
这些技术通常用于从图像中提取有用的信息,例如物体的边缘、形状等,以便进行进一步的分析和测量。
请注意,这只是一个大致的描述,实际的实现细节可能因具体的软件平台和硬件配置而有所不同。
如果您需要更详细的信息,建议参考Halcon的官方文档或相关教程。
halcon卡尺测量

halcon卡尺测量Code直线卡尺* 获取图像及图像尺⼨dev_close_window ()read_image (Image, 'fabrik')get_image_size (Image, Width, Height)dev_open_window_fit_image (Image, 0, 0, -1, -1, WindowHandle)dev_set_line_width (1)dev_display (Image)* 标记测量位置draw_line (WindowHandle, Row1, Column1, Row2, Column2)LineParams := [Row1, Column1, Row2, Column2]* 创建测量句柄create_metrology_model (MetrologyHandle)* 添加测量对象set_metrology_model_image_size (MetrologyHandle, Width, Height)add_metrology_object_generic (MetrologyHandle, 'line', LineParams, 20, 3, 1, 30, [], [], Index)* 设置测量对象的参数* set_metrology_object_param (MetrologyHandle, 'all', 'measure_transition', 'negative')* set_metrology_object_param (MetrologyHandle, 'all', 'num_measures',10)* set_metrology_object_param (MetrologyHandle, 'all', 'num_instances', 1)* set_metrology_object_param (MetrologyHandle, 'all', 'measure_sigma', 1)* set_metrology_object_param (MetrologyHandle, 'all', 'measure_length1', 20)* set_metrology_object_param (MetrologyHandle, 'all', 'measure_length2', 5)* set_metrology_object_param (MetrologyHandle, 'all', 'measure_threshold',30)* set_metrology_object_param (MetrologyHandle, 'all', 'measure_interpolation', 'bicubic')* set_metrology_object_param (MetrologyHandle, 'all', 'measure_select', 'all')* set_metrology_object_param (MetrologyHandle, 'all', 'min_score', 0.7)* 执⾏测量,获取边缘点集dev_set_color ('yellow')apply_metrology_model (Image, MetrologyHandle)get_metrology_object_measures (Contours, MetrologyHandle, 'all', 'all', Row, Column)dev_set_color ('red') gen_cross_contour_xld (Cross, Row, Column, 6, 0.785398)* 获取最终测量数据和轮廓线dev_set_color ('green')dev_set_line_width (2)get_metrology_object_result (MetrologyHandle, 'all', 'all', 'result_type', 'all_param', Parameter)get_metrology_object_result_contour (Contour, MetrologyHandle, 'all', 'all', 1.5)* 释放测量句柄clear_metrology_model (MetrologyHandle)Explanationset_metrology_model_image_size( : : MetrologyHandle, Width, Height : )使⽤ set_metrology_model_image_size 该算⼦设置测量区域,⽽且该算⼦必须在 add_metrology_object_generic 这类添加测量对象的算⼦之前调⽤,否则在使⽤ apply_metrology_model 执⾏测量时会重新计算测量区域,降低效率。
Halcon学习之2D测量

从图像中提取的2D特征通常包括:●物体的面积,例如:像素的数目代表了物体。
●物体的方向●物体之间或物体组成部分之间的角度●物体的位置●物体的尺寸,例如:直径,宽,高,以及物体之间或物体组成部分之间的距离●物体的数量可使用的处理方法●区域处理●轮廓处理●简单的几何操作measure_metal_part_first_example.hdevstep1:创建regions并抽取基本特征step2:抽取轮廓step3:分割轮廓step4:将轮廓分割成线性和圆形的部分blob分析●预处理图像或区域mean_image或binomial_filter,median_imagegray_opening_shape,gray_closing_shape,平滑图像:smooth_image平滑图像但保留边缘:anisotropic_diffusion对于区域,填充孔洞可以用fill_up或形态学算子,opening_circle and opening_rectangle1,closing_circle 和closing_rectangle1●将图像分割成区域阈值化算子:auto_threshold, bin_threshold, dyn_threshold, fast_threshold, and threshold当手动选择阈值时,获知图像灰度值的分布信息可能非常有帮助。
合适的算子包含:gray_histo, histo_to_thresh, and intensity,你也可使用HDevelop在线的Gray Histogram检测工具,来交互搜索一个合适的阈值。
使用阈值化算子将图像进行分割后,图像中的感兴趣部分就变成了一个区域。
要将此区域分成多个不同的区域,如对每一个连接部分构成一个区域,必须使用connection算子。
对于具有蜂窝状形状结果的物体,使用watershed算子比使用一个阈值算子更合适,因为他们基于拓扑来分割图像,而不是图像的灰度值。
halcon卡尺工具原理
halcon卡尺工具原理
Halcon卡尺工具是一种基于数字图像处理技术和计算机视觉理论的辅助工具,主要用于检测和测量二维图像中目标物体的尺寸、角度、位置等参数。
其原理主要包括以下几个步骤:
第一步,设置卡尺参数
在使用Halcon卡尺工具之前,需要针对具体的图像和目标物体,设置卡尺的相关参数,例如卡尺的长度、方向、宽度、灵敏度等。
其中,最重要的参数是卡尺的方向和长度。
卡尺方向应该与待测量的对
象边缘线段垂直,而卡尺长度应该略大于待测量对象的实际大小。
第二步,寻找卡尺起点
在确定了卡尺参数后,需要在图像中寻找卡尺的起点。
为此,Halcon卡尺工具可以通过多种方式来寻找卡尺起点,例如基于边缘检测、二值化、阈值化等算法。
一旦找到卡尺起点,Halcon卡尺工具就
可以开始进行测量。
第三步,测量目标物体
在卡尺起点确定之后,Halcon卡尺工具会沿着卡尺方向,不断拓展卡尺线段,直至检测到目标物体的边界线段。
在检测到目标物体边
界线段之后,Halcon卡尺工具就可以计算出该线段的长度、位置和方
向等参数。
第四步,输出结果
当Halcon卡尺工具完成测量之后,会将测量结果以文本或图像
的形式输出。
这些结果可以用于后续的图像处理分析、物体识别或机
器视觉检测等应用。
通过以上步骤,Halcon卡尺工具能够快速、准确地实现对二维图像中目标物体的测量和检测,为数字图像处理和计算机视觉技术的研
究和应用提供了有力支撑。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
close_measure(MeasureHandle) 释放内存
1D 测量:创建对象: gen_measure_arc
Profile Line
ROI
Radius
AngleExtend
Annulus Radius
AngleStart CenterRow CenterCol
1D 测量: measure_projection
0
3
6
剖面
9
12
15
index
1D 测量: measure_thresh
为测量对象计算剖面灰度值 通过阈值提取剖面函数和插值的交点 参数:
Image:输入图像 MeasureHandle: 剖面测量句柄 Sigma: 剖面高斯平滑的色散 Threshold: 剖面函数点提取阈值 Select:选取点的位置 Row/ColumnThres: 提取点的坐标(sub-pixels) Distance: 两连续点的距离(sub-pixels)
-20.0
'negative'
Distance
边缘提取
一阶导数
1D 测量: measure_pairs
在1D剖面上提取插值边缘 边缘分组 参数:
Image: 输入图像 MeasureHandle: 剖面线测量句柄 Sigma:剖面高斯平滑的色散 Threshold:剖面上提取边缘的最小梯度幅值 Transition:边缘灰度值过渡类型 Row/ColumnEdgeFirst: 一组对边中第一条边的坐标 AmplitudeFirst:一组对边中第一条边的过渡幅值 Row/ColumnEdgeSecond:一组对边中第二条边的坐标 AmplitudeSecond:一组对边中第二条边的过渡幅值 IntraDistance: 一组对边两个边缘之间的距离(sub-pixels) InterDistance: 相邻边缘之间的距离(sub-pixels)
CenterRow, CenterCol: 圆形剖面线的圆心 Radius: 圆形剖面线的半径(像素值) AngleStart: 剖面线上起始点的极坐标 (in radians) AngleExtend: 分割剖面的角度范围(in radians) AnnulusRadius: 圆环投影区域宽度的二分之一 (in pixels) Interpolation: 插值方法 Width, Height: 需要处理的图像的范围 MeasureHandle: 测量对象的句柄
Line distance_pl distance_sl distance_lc distance_lr
Line Segment distance_ps distance_sl distance_ss distance_sc distance_sr
Contour distance_pc distance_lc distance_sc distance_cc distance_cc_min -
转换
affine_trans_contour_xld contour_to_world_plane_xld
分组
union_adjacent_contours_xld union_collinear_contours_xld union_collinear_contours_ext_xld union_cocircular_contours_xld
亚像素位置
卷积 高斯 递归(Lanser, Deriche, Shen) 轮廓上的点在边缘梯度最大的 地方 二次曲面逼近 梯度方向上抛物线外推法
线: 提取
lines_gauss, lines_color
线结构的宽度
lines_facet
类似于lines_gauss 不同的滤波模板
2D 测量: 轮廓平滑
smooth_contours_xld
2D 测量: 轮廓校正
gen_parallel_contour_xld
2D 测量: 轮廓转换(affine_trans_contour_xld)
低分辨率图像中的线
映射到高分辨率图像中
2D 测量:轮廓世界坐标转换
contour_to_world_plane_xld
线:lines_gauss 支持 bar-shaped, parabolic 和 Gaussian 线模型
'bar-shaped'
'parabolic'
'gaussian'
阈值: 阈值边界提取
threshold_sub_pix
亚像素 灰度值双线性插值
2D测量:算子
边缘提取
edges_sub_pix edges_color_sub_pix zero_crossing_sub_pix
dp[i]
10.0 0 -10.0
i
测量对象
一阶导数
1D 测量: 范例
条码读取 道路宽度提取
2D 测量: Edge & Line Contours
2D 测量: 边缘
高精度测量
2D 测量: 线
血管提取
2D 测量: 亚像素阈值分割
自动轮廓分割 双线性插值 threshold_sub_pix
1D 测量: measure_thresh
measure_thresh( Image, MeasureHandle, 1.0, 195.0, `all´, RowThresh, ColumnThresh, Distance)
p[i]
195.0
0
Distance
i
提取的点
平滑剖面
1D 测量: Edge Pairs
2D 测量: 彩色边缘
颜色信息可以为分隔物体提供额外的信息 分割彩色图像到亚像素精度的创新方法 此方法可以应用于任意通道的图像
2D 测量: 彩色边缘
有些边缘只能通过彩色信息才能检测到 edges_color_sub_pix & edges_sub_pix
灰度图像 亚像素边缘提取
1D 测量: measure_pos
measure_pos( Image, MeasureHandle, 1.0,20.0,'all','all', RowEdge, ColumnEdge, Amplitude, Distance)
dp[i]
20.0 0
Transition:
i
'positve'
通过投影图像上垂直于剖面线方向的灰度值来提取1D灰度剖面 参数:
Image: 输入图像 MeasureHandle: 剖面线测量句柄 GrayValues: 剖面线上灰度投影值(tuple)
GrayValues[index]
200 150
Lines of Projection
测量对象
Mode: 轮廓属性处理(方向保持与否)
2D 测量: 轮廓分组
原始轮廓
分组后轮廓
2D 测量: 轮廓裁剪
2D 测量: 轮廓拟合
fit_line_contour_xld
预定义形状轮廓的逼近 模型
回归 / 代数(Regression / algebr状轮廓的逼近 模型
在 线
图像
灰度投影 和边缘检测
选择 & 分组 边缘
1D 测量
定位边缘ROI 直线和圆弧形状的ROI ROI 宽度可变,灰度投影 边缘选取和分组
1D 测量:创建对象: gen_measure_rectangle2
通过一个矩形创建一个线性测量对象
参数:
Row, Column: 直剖面线的中心 Phi: 直线剖面的方向 (in radians, counterclockwise to positive x-axis) Length1: 剖面线长度的一半(in sub-pixels) Length2: 投影区域高度的一半(in sub-pixels) Width, Height: 需要处理的图像的范围 Interpolation: 插值方法 MeasureHandle: 测量对象的句柄
1D 测量: measure_pairs
measure_pairs( Image, MeasureHandle,1.0,25.0,'all','all', RowEdgeFirst, ColumnEdgeFirst, AmplitudeFirst, RowEdgeSecond, ColumnEdgeSecond, AmplitudeSecond, InterDistance, IntraDistance)
原始轮廓
校正后轮廓
2D 测量: 轮廓分组
算子
union_adjacent_contours_xld
任务 连接相邻轮廓 参数
MaxDistAbs MaxDistRel Mode
2D 测量: 轮廓分组
union_adjacent_contours_xld
MaxDistAbs: 轮廓终点的绝对距离
MaxDistRel:相对于较长轮廓的相对距离
抑制外围点
例程: 钻石质量检测
2D 测量: 轮廓拟合
fit_circle_contour_xld fit_ellipse_contour_xld
2D 测量: 轮廓拟合
fit_rectangle2_contour_xld
拟合前
拟合后
二维测量算子统计
Point Point Line Line Segment Contour Region distance_pp distance_pl distance_ps distance_pc distance_pr