采样点的三维空间坐标图绘制程序1
零基础系列2-手把手教你用GIS 软件制作采样地图绘制样品分布点

地图 如果你只是在某个省取点, 那有某个省的地图也就够 了,看自己的绘制需求。 需要的是GIS格式的地图, 矢量: shp、dwg一步:导入并转换你的数据
打开Arcmap软件,点击右侧的catalog图标,将保存有采样点和地 图的文件夹添加至Folder Connections文件夹下
图所示,已经添加上了经纬网!
第六步(可选):如果想把地图里 的某几个县单独抠出来作图,怎么 办?
• 回到数据视图,点击选择要素按钮,然后按住 shift键不松手的同时,鼠标左键点击需要的县 (如图所示,我选择了3个县)
21
然后,鼠标右键点击县----数据----导出数据。
22
可以更改输出的要素名字, 比如我将Export_Output改为 数据1,单击确定
23
新增了一个数据1
24
然后去掉县图层的勾,就抠出了我们想要的3个县。
25
更复杂的抠图,比如按一定属性(面积, 名字等等)来筛选区域,就要用到属性表, 通过SQL语句提取,简单说一下:
26
27
1.在该处使用右边滑块找到 LIN_CHANG这个属性字段
感谢师妹张飘的付出,此操作ppt是在她的手册基础上 丰富的。
4
前期准备
GIS软件安装包 自行先把软件安 装好,然后打开
ArcMap10.2.1
采样表——EXCEL数据 一定按顺序来填数据, 方便后续的处理:经度 E、纬度N、海拔高度H、 其他信息(比如采样点 样品的XX成分含量等)。 如果导入不了数据,可 能是你的EXCEL版本太高, 最好为97-03版。
手把手教你用GIS 软件 制作采样地图、绘制样品分布点
如何建立三坐标的测量程序呢?

如何建立三坐标的测量程序呢?在三坐标接收一个新工件的时候,每个人心中都有自己的一套方法,但是每人的见解、经验不同,造成了测量流程的不同,这就容易出现测量结果不一致等问题。
根据多年的三坐标使用经验,现将一个新工件的测量流程分为分析测量要求-确定测量方案-定义校验测头-零件装夹-编制测量程序-运行程序-输出报告七个阶段。
下文对每一个阶段进行了详细的阐述。
一、分析测量要求当一个新的工件送到三坐标进行检测时,我们首先要了解的是这个工件要测量什么,也就是送测人员的测量要求。
根据我们三坐标的精度如2.2+3.0L/1000 μm对测量要求进行分析,看三坐标精度是否满足测量要求,还有该工件要测量形位公差中的哪一项或哪几项。
因为测量要求决定了我们的测量方法及测量过程。
在这时也需要该工件的加工或者成品图纸,作为测量的依据。
同时需要了解的是该工件的加工过程,了解工件加工基准(这个是必须的,因为有些工件在加工时并不是按照图纸上的设计基准或工艺基准进行加工的,具体的情况在下一步中进行分析)。
二、确定测量方案该过程是要根据测量要求确定测量方案、测量方法和测量基准。
测量方案和测量方法的确立由上一部的测量要求分析根据经验来确定。
而测量基准的选择对于测量结果的准确性有很大的影响。
如上文中提到的情况加工的加工基准与工艺设计基准不一致,根据实际情况分为两种,一是加工能力或加工过程的检验。
二是成品检验。
第一种情况一般由加工基准来作为测量基准建立坐标系,从而对工件进行测量;第二种情况则一般是选用工艺设计基准建立坐标系对工件进行测量。
当然,测量方案、测量方法和测量基准的选择涉及到了很多经验方面的问题,本文就不一一详述。
三、定义校验测头该过程根据工件要测量的元素,选取不同配置的测头文件、测头角度、测杆长度等。
定义完毕后对测头进行校验。
选择探针的原则:为保证一定的测量精度,在对探针的使用上,需要:1、探针长度尽可能短:探针弯曲或偏斜越大,精度将越低。
使用测绘技术绘制3D地图的步骤和要点

使用测绘技术绘制3D地图的步骤和要点概述:随着科技的不断发展,测绘技术在地理信息领域的应用越来越广泛。
其中,绘制3D地图成为了一项备受关注的技术,因为它可以提供更精确、真实的地理信息。
本文将探讨使用测绘技术绘制3D地图的步骤和要点。
一、数据采集绘制3D地图的第一步是数据采集。
这个过程可以通过多种方法实现,例如使用卫星遥感、无人机、激光测量等技术。
卫星遥感可以提供大范围的地理信息,但精度相对较低。
无人机则可以提供更详细的地理信息,但覆盖范围有限。
激光测量技术可以通过发射激光束并测量其返回时间来精确获取地理信息。
二、数据处理采集到的原始数据需要进行处理,以获得可用于绘制3D地图的数据。
数据处理的过程包括数据清洗、数据筛选、数据匹配等。
首先,需要清除采集到的原始数据中的噪声和干扰。
然后,选择合适的数据进行筛选,以确保数据的质量和准确性。
最后,通过对数据进行匹配,将不同数据源的信息融合在一起,以获取更全面的地理信息。
三、地形建模地形建模是绘制3D地图的关键步骤之一。
通过使用测绘技术获取的数据,可以构建真实的地形模型。
地形建模可以分为两个部分:数字地形模型(Digital Terrain Model,简称DTM)和数字地面模型(Digital Surface Model,简称DSM)。
DTM表示地面的高程,DSM则包括地面、建筑物、树木等所有地物的高程。
四、材质贴图绘制3D地图时,除了地形模型,还需要添加真实的材质贴图。
材质贴图是绘制3D地图的一个重要方面,它可以增加地图的真实感和可读性。
材质贴图可以使用空照图、纹理图或者其他形式的材质,以使地图更加逼真。
五、光照渲染光照渲染是绘制3D地图的一个关键步骤。
通过对地图模型进行光照处理,可以使地图看起来更加生动、立体。
光照渲染可以根据地理位置、时间和天气等因素来确定光照的方向、强度和颜色。
通过合理的光照渲染,地图上的地形、建筑物等地物可以更加清晰可见。
六、交互功能绘制3D地图还可以添加交互功能,以提供更好的用户体验。
使用测绘技术进行三维地理信息可视化的步骤

使用测绘技术进行三维地理信息可视化的步骤在当今数字化时代,地理信息系统(GIS)已经成为了地理学、城市规划以及自然资源管理等众多领域的重要工具。
而传统的二维地理信息系统已经逐渐无法满足人们对地理信息的需求,因此三维地理信息可视化的需求也越来越迫切。
测绘技术在三维地理信息可视化中起到了至关重要的作用,下面将介绍使用测绘技术进行三维地理信息可视化的步骤。
第一步,数据采集。
数据采集是进行三维地理信息可视化的基础,只有准确、全面、高质量的数据才能保证可视化的真实性和可靠性。
对于三维地理信息可视化,主要采集的数据包括地物的三维坐标、高程数据等。
现代测绘技术提供了多种数据采集的方法,如全球定位系统、惯性导航系统、激光雷达等,这些技术能够快速、准确地获取地理信息数据。
第二步,数据处理。
采集到的原始数据常常需要进行处理,以便更好地支持三维地理信息可视化。
数据处理包括数据的清洗、整理、配准等过程。
清洗数据是为了去除数据中的噪声和异常值,整理数据是将不同格式、不同来源的数据整合到一个统一的数据集中,配准数据是将不同来源、不同坐标系的数据进行转换,使其能够在同一个坐标系下进行可视化。
第三步,数据建模。
在进行三维地理信息可视化之前,需要对采集到的数据进行建模。
数据建模是将真实世界中的物体和场景抽象为计算机能够识别和处理的数据模型。
三维数据建模常用的方法有数学模型法、图像处理法、曲面拟合法等。
第四步,地图制作。
地图制作是三维地理信息可视化的核心环节。
地图制作的目标是将数据模型转化为可视化的视觉表达形式,以便用户能够更直观地理解地理信息。
地图制作需要选择合适的图像渲染技术,如阴影渲染、贴图渲染等,以及适当的符号表示方法,如颜色、形状、大小等。
第五步,交互与分析。
三维地理信息可视化不仅仅是展示,还需要支持用户的交互和分析。
交互包括用户对地图进行旋转、缩放、平移等操作,以便更好地观察地理信息。
分析包括对地理信息进行查询、测量、比较等操作,以便从地理信息中提取有价值的数据。
测绘技术中的三维空间数据采集方法

测绘技术中的三维空间数据采集方法引言在现代测绘技术的发展中,三维空间数据采集方法是一项重要的技术领域。
随着科学技术的进步和人们对地球环境的需求不断增长,三维空间数据采集方法的应用越来越广泛。
本文将探讨测绘技术中的三维空间数据采集方法,包括激光雷达技术、摄影测量技术和全球定位系统(GPS)技术。
激光雷达技术激光雷达技术是一种通过测量从激光器发射的激光束到达目标表面反射回来的时间差来获取目标的三维坐标的方法。
它具有非接触、高精度、高效率等特点,因此在测绘领域应用广泛。
激光雷达技术的数据采集主要包括两个步骤:发射激光束和接收反射回来的激光脉冲。
发射激光束通常是通过调节激光器的频率和幅度来实现的,而接收激光脉冲则是通过接收器和探测器来完成的。
激光雷达技术的应用包括地形测量、建筑物模型重建、森林资源管理等领域。
例如,在地震风险评估中,激光雷达技术可以准确地测量地表的高程和地形变化,帮助科学家预测地震的潜在影响。
摄影测量技术摄影测量技术是一种通过相机和图像处理技术来获取目标的三维坐标的方法。
它利用摄影测量原理,通过测量同一目标在不同位置和不同方向上拍摄的影像之间的关系,来推导出目标的三维空间坐标。
摄影测量技术的数据采集主要包括两个步骤:相机的安装和影像的处理。
相机的安装通常是通过选择合适的安装位置和拍摄参数来实现的,而影像的处理则是通过将多幅影像进行匹配、配准和三维重建等处理来完成的。
摄影测量技术的应用包括地形测量、建筑物监测、城市规划等领域。
例如,在城市规划中,摄影测量技术可以利用航空影像或卫星影像来获取城市地理信息,包括建筑物高度、道路布局等,为城市规划提供重要的数据支持。
全球定位系统(GPS)技术全球定位系统(GPS)技术是一种通过接收卫星信号来确定接收器位置的方法。
它利用卫星的位置和接收器的测距信息,计算接收器的三维坐标。
GPS技术的数据采集主要包括两个步骤:卫星信号接收和数据处理。
卫星信号接收通常是通过接收器接收来自卫星的信号,并计算接收器到卫星的距离,而数据处理则是通过接收器内置的处理程序将距离信息转化为三维坐标。
三维测量演示案例操作步骤

三维测量演示案例操作步骤
1.从【新建文件】打开如下待测量图片:
2.点击【三维标定】弹出右侧面板
3.在图中标黄点的位置用鼠标右键单击添加红色标记点(标记点右侧有序号)
4.依照标记点序号顺序,将图中的坐标值填入右侧面板对应位置,如最左上方的标记点序号为‘6’,图中坐标值为(218,52.5,233.5),则应在右侧面板第6行填入三个坐标值。
5.点击面板中的【计算】,则图中出现红色矩形框,同时面板中“标定精度”一栏显示一个数值。
拖动面板最下方的三个拖条,可看到红色框的伸缩沿着图像中的楞轴,同时“标定精度”超过95%,则说明标定是准确的,可进行下一步测量。
6.鼠标右键依次在脚下、头顶点两个点(位置应为人体站立时的重心,如图所示),则同时可在右侧面板得到身高。
图中人物真实身高为180cm,穿鞋后身高约181,测量结果允许±1cm 误差。
注意:图片中预先标注的黄点和坐标是为了演示时方便,在真实测量过程中,点是根据现场环境确定的(原则是各种现场的角点,如家具转角、墙壁拐角等,一般选6-8个即可),而坐标值是需要到现场进行测量后得到的。
测绘技术中的三维地图制作方法

测绘技术中的三维地图制作方法在测绘技术的发展中,三维地图制作方法是一项极具挑战性的任务。
随着科技的进步和需求的增加,制作精确且真实的三维地图已经成为现实,为各行各业提供了巨大的便利和发展空间。
本文将介绍三维地图制作的方法和技术,以及其在不同领域中的应用。
首先,制作三维地图的第一步是获取地理数据。
可以借助空中摄影、激光雷达、卫星影像等技术手段,对地理区域进行全方位和多角度的扫描和拍摄,以获取大量的地理信息和数据。
这些数据可以包括地表高程、建筑物轮廓、道路网、水系等。
这些数据以数字化的形式存储,并且经过精确的测量和处理,以确保地图的准确性和一致性。
接下来,对获取的地理数据进行处理和重建。
这一步骤包括图像处理、点云处理、建模等技术。
通过图像处理算法,可以对获取的图像进行校正、去噪、增强等操作,以提高图像的质量和清晰度。
点云处理则是将获取的激光雷达或其他传感器产生的点云数据进行滤波、配准、密度调整等处理,以消除噪声和异常点,提高点云数据的精度和可用性。
建模技术则是将点云数据转化为三维模型,包括建筑物、地形、道路等各种要素的建模。
这一过程通常需要借助计算机辅助设计软件和算法,以完成精确、高效的建模工作。
制作完成后,就是对三维地图进行可视化呈现和交互操作。
在可视化呈现方面,可以采用虚拟现实(VR)技术,将三维地图呈现在虚拟环境中,用户可以通过头戴显示设备进入虚拟环境,并与地图进行互动。
另外,也可以采用增强现实(AR)技术,通过在真实场景中叠加虚拟信息的方式来展示三维地图,用户可以利用手机或平板电脑等设备进行交互和操作。
通过这些可视化和交互手段,用户可以更直观地了解地理信息和拓展自己的认知。
三维地图制作方法的应用广泛。
在城市规划和建设方面,三维地图可以提供详细的地理信息,帮助规划师和建筑师进行设计和决策。
在环境保护和资源管理方面,三维地图可以提供地貌和地形的准确信息,用于环境评估和资源开发。
在旅游业和城市导航方面,三维地图可以提供真实的场景和路线指引,为游客和居民提供便利。
PhotoScan 生成正射影像、DEM(有地面控制点)和三维模型的重建教程(1)

PhotoScan生成正射影像DEM(有地面控制点)和三维模型的重建教程一、生成正射影像和DEM(有地面控制点)1、概述2、PhotoScan首选项使用工具菜单中的相应命令打开PhotoScan首选项对话框:在“常规”选项卡上为参数设置以下值:立体声模式:浮雕(如您的图形卡支持四路缓冲立体声,请使用硬件)立体视差:1.0将日志写入文件:指定将存储Agisoft PhotoScan日志的目录。
(如果需要联系软件支持团队)在GPU选项卡中设置参数如下:在对话框中检查由PhotoScan检测到的任何GPU设备。
使用少于两个GPU时检查“使用CPU”选项。
在“高级”选项卡上为参数设置以下值:项目压缩级别:6保留深度图:启用存储绝对图像路径:禁用检查程序启动时的更新:启用启用VBO支持:启用3、添加照片要添加照片,请从工作流菜单中选择添加照片...命令或单击位于工作空间工具栏上的添加照片按钮。
在添加照片对话框中浏览源文件夹并选择要处理的文件。
点击打开按钮。
4、加载相机位置(此次使用的御2自带POS信息,故不用此步骤)在这一步,将来模型的坐标系使用相机位置进行设置。
注意:如果相机位置未知,则可跳过此步骤。
然而,对齐照片程序在这种情况下需要更多时间。
使用“查看”菜单中的相应命令打开“参考”窗格。
单击参考窗格工具栏上的导入按钮,然后在打开对话框中选择包含摄像头位置信息的文件。
最简单的方法是加载简单的由字符分隔的文件(* .txt,* .csv),该文件包含每个摄像头位置的x坐标和y坐标以及高度(摄像机方向数据,即俯仰角,俯仰角和偏航角值)也可以导入,但数据不是强制性的参考模型)。
在“导入CSV”对话框中,根据文件的结构指示分隔符,然后选择要从其开始加载的行。
请注意,#字符表示在对行进行编号时不计数的注释行。
通过在对话框的列部分设置正确的列号,为程序指示在每列中指定了什么参数。
建议在相应字段中指定用于相机中心数据的值的有效坐标系。
三维空间的坐标点TPointC++程序.doc

1 C++ 面向对象程序设计基础【实验简介】学会用算法语言C++ 描述抽象数据类型,使用模板建立数据结构。
理解数据结构的组成分为两部分,第一部分是数据集(数据元素),第二部分是在此数据集上的操作。
从面向对象的观点看,这两部分代表了对象的属性和方法。
掌握用C++ 描述数据结构的基本方法,即通过建立类来描述抽象数据类型。
类的数据成员提供对象属性,成员函数提供操作方法,方法是公共接口,用户通过调用方法实现对属性的访问。
【实验内容】1. 定义三维空间的坐标点2. 描述三维空间的球等)。
【主要代码】#include<iostream.h>#define PI 3.1415926 template <class T> class Tpoint { private:T x,y,z; public:Tpoint() {x=0;y=0;z=0;} Tpoint(T a,T b,Tc) {x=a;y=b;z=c;} Tpoint(Tpoint &a); Tgetx(){return x;} T gety(){return y;} Tgetz(){return z;} T Tpointmove(T mx,Tmy,T mz) {x+=mx;y+=my;z+=mz;} voidinput(){cout<<" 请输分别输入点的坐标x,y,z 的值:"<<endl;cin>>x>>y>>z;}void output(){ cout<<"("<<x<<","<<y<<","<<z<<")"<<endl;}Tpoint<T> operator=(Tpoint<T> &p1); }; template <class T>Tpoint<T>::Tpoint<T>(Tpoint<T> &p1) {x=p1.getx(); y=p1.getx(); z=p1.getz();}template <class T>Tpoint<T> Tpoint<T>::operator =(Tpoint<T> &p2){x=p2.getx();y=p2.getx();z=p2.getz(); return*this;} template <class T> class Tball{ private:Tpoint<T> m; double radius;public: Tball<T>(){ radius=0;}Tball<T>(Tpoint<T> & zx,T zy){ m=zx; radius=zy;}T volume(){return (4.0/3)*PI*radius*radius*radius;}T area(){return 4*PI*radius*radius;} voidsetradius(){cout<<" 设置球的半径:"<<endl;cin>>radius;}void setTpoint(){ cout<<" 设置球的圆心坐标:"<<endl;m.input();}void output(){cout<<" 球的圆心坐标为:"m.output();cout<<" 球的半径为:"<<radius<<endl;}void Tballmove(T mx,T my,T mz){ m.Tpointmove(mx,my,mz);}};【实验过程】设置球的半径5.89 设置球的贺心坐标:请分别输入点的坐标x,y,z的值:123球的表面积为:435.954 球的体积为:855.923 球的圆心坐标为: (1,2,3) 球的半径为:5.89Press any key to continue 【实验体会】void main(){Tball<double> x1;x1.setradius();x1.setTpoint(); cout<<" 球的表面积为:"<<x1.area()<<endl; cout<<" 球的体积为:"<<x1.volume()<<endl; x1.output();}TPointTBall ,实现其主要操作(如计算体积和表面积,输出空间首先要弄清楚球与点的关系,点是球的一个属性,所以在定义球类的时候不能用球继承点的类。
三坐标测量元素的构建方法

三坐标测量元素的构建方法我折腾了好久三坐标测量元素的构建方法,总算找到点门道。
我一开始接触这个的时候,那真的是一头雾水。
我就感觉像是在黑暗里摸索,啥也看不见。
我记得我第一次试着构建一个平面元素,我就想当然地选了几个点,然后觉得这些点看起来差不多在一个平面上就行了。
结果呢,那测量结果简直是一塌糊涂。
这就是我犯的第一个错误,这才知道随便选点是不行的。
后来我就去看书,看教程。
书上讲要有代表性的点,这是什么意思呢?就好比是架子撑着一块布,如果支撑点选得不对,布就不平整一样。
构建平面就得选好那些能代表这个平面的点,比如说平面的四个角,中心的点之类的。
像我之前就只选了靠得比较近的几个点,这怎么能准呢?再说圆柱的构建方法。
我试过按最少点数来选点,就是书上说的那几个理论上最少的点,结果得到的圆柱测量误差特别大。
我就想,这肯定不对啊。
后来又试了一种方法,多选取一些不同高度层面上的点。
就像给圆柱裹了好多圈测量点,一层一层的。
这样测量出来的圆柱元素就准确多了。
还有圆锥的构建,我一开始不懂怎么确定圆锥的顶点。
我就稀里糊涂地乱选了一组点,反正就按照所谓的规则选了一些点,可怎么看圆锥的形状都怪怪的。
后来我才明白得从圆锥的母线方向去考虑选点,就是要能体现它从大到小变化的那些点。
就像我们看一座山,如果要测量这山的坡度相关的数据,肯定要从山尖到底下山脚沿坡面选点一样。
对于三坐标测量元素构建我还有一个心得就是,一定要检查你的测量环境和量具的准确性。
我有次测量一直不对劲,怎么也找不出构建元素出错的原因,最后发现是测量设备的底座有点不平。
这就像盖房子,如果地基都歪了,房子肯定建不好。
我现在做事先会仔细规划测点,就像盖房子前先画设计图一样。
多想想这个元素的形状特点,然后慎重选点,这就是我摸索这么久得出的一些关于三坐标测量元素构建方法的经验了。
不过这里面还有好多复杂的情况我也不太确定,还得继续摸索。
像一些特殊形状或者不规则形状的元素构建,我的经验就不是很足了,只能说还是得慢慢尝试不同的选点方式,多实践多总结吧。
毕业设计-基于autocad的三维空间数据采集和3d显示

目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1 选题的背景及意义 (1)1.2研究的意义 (1)1.3AutoCAD Map 3D国内外研究现状 (2)2 地理信息系统软件AutoCAD和Autodesk Map 3D的概况 (2)2.1 AutoCAD相关技术概况 (2)2.1.1Autodesk公司及其产品 (2)2.1.2 AutoCAD简介 (2)2.1.3 三维AutoCAD 系统的特性 (3)2.2 AutoCAD Map 3D相关技术概况 (3)2.2.1AutoCAD Map 3D概述 (3)2.2.2AutoCAD Map 3D功能 (6)2.2.3 AutoCAD Map 3D 的主要技术特点 (12)3 三维空间数据采集背景 (13)3.1三维空间信息概述 (13)3.2 三维GIS (14)3.2.1三维地理信息优势 (14)3.2.2 三维GIS主要产品 (15)3.3三维空间数据采集方法 (16)4 基于AutoCAD Map 3D的地理空间数据采集和可视化应用 (16)4.1AutoCAD Map 3D的功能解决方案 (16)4.2 AutoCAD数字化采集地理空间数据 (18)4.3 AutoCAD Map 3D数据库应用案例 (18)4.3.1数据的输入 (19)4.3.2数据的编辑 (19)5 总结 (22)致谢 (24)参考文献 (25)基于AutoCAD的三维空间数据采集和3D显示摘要目前,几乎全部的道路、建筑、规划等的设计软件都是在AutoCAD 基础上进行二次开发的,因此大部分数字制图软件也是基于AutoCAD开发的,例如目前被广泛使用的南方测绘公司开发的CASS 系列产品。
但是AutoCAD 软件产品不能直接进入地理信息系统的数据库,这在很大程度上影响了AutoCAD 软件产品的应用,使其在地理信息系统方面有很大的局限性。
Autodesk 公司推出的新产品Autodesk Map 3D 软件很好地解决了这一问题。
Python中三维坐标空间绘制的实现

Python中三维坐标空间绘制的实现在三维空间绘制点,线,⾯1.绘制点⽤scatter()散点绘制三维坐标点from matplotlib import pyplot as pltfrom mpl_toolkits.mplot3d import Axes3Ddot1 = [[0, 0, 0], [1, 1, 1], [2, 2, 2], [2, 2, 3], [2, 2, 4]] # 得到五个点plt.figure() # 得到画⾯ax1 = plt.axes(projection='3d')ax1.set_xlim(0, 5) # X轴,横向向右⽅向ax1.set_ylim(5, 0) # Y轴,左向与X,Z轴互为垂直ax1.set_zlim(0, 5) # 竖向为Z轴color1 = ['r', 'g', 'b', 'k', 'm']marker1 = ['o', 'v', '1', 's', 'H']i = 0for x in dot1:ax1.scatter(x[0], x[1], x[2], c=color1[i],marker=marker1[i], linewidths=4) # ⽤散点函数画点i += 1plt.show()2.绘制线函数plot3D(xs, ys, *args, zdir=‘z', **kwargs),⽤于绘制三维坐标的线,其参数使⽤说明如下.(1)xs,ys,zdir=‘z': 设置(x,y,z)坐标值,为集合对象,是该函数与plot()的唯⼀区别.(2) kwargs:接受键值对参数,使⽤⽅法同plot()from matplotlib import pyplot as pltfrom mpl_toolkits.mplot3d import Axes3Dimport numpy as npplt.figure()ax = plt.subplot(111, projection='3d')ax.set_xlim(0, 20) # X轴,横向向右⽅向ax.set_ylim(20, 0) # Y轴,左向与X,Z轴互为垂直ax.set_zlim(0, 20) # 竖向为Z轴z = np.linspace(0, 4*np.pi, 500)x = 10*np.sin(z)y = 10*np.cos(z)ax.plot3D(x, y, z, 'black') # 绘制⿊⾊空间曲线# ----------------------------------------------------------z1 = np.linspace(0, 4*np.pi, 500)x1 = 5*np.sin(z1)y1 = 5*np.cos(z1)ax.plot3D(x1,y1,z1,'g--') #绘制绿⾊空间虚曲线#------------------------------------------------------------ax.plot3D([0,18,0],[5,18,10],[0,5,0],'om-') #绘制带o折线plt.show()3.绘制⾯3D 图形需要的数据与等⾼线图基本相同:X、Y 数据决定坐标点,Z 轴数据决定 X、Y 坐标点对应的⾼度。
采样点图的制作

一、
你有dem 了?
第一,做好excel 表格,把你有的这些属性全部放到一张sheet 表里边,每一列是一个属性;
第二,加载这个sheet 表格到arcmap 里边。
这一步X 表示经度,y 表示纬度,另外只给他定义一个地理坐标系就可以了,不要定义投影坐标系。
第三,加载DEM(看看你的dem 的坐标系分别是什么,把地理坐标系统一了)前边没问题的话,你的采样点应该已经可以再dem 上边显示出来了,下面设置显示内容。
把你的采样点图层重新输出一份,然后,右键单击采样点图层/属性/label 选项显示岩层/ok ,最后右键单击采样点图层,弹出菜单,在label 勾选上。
不介意的话,我给你示范。
留QQ.
二、
1、用EXCEL 整理好坐标点,按照经度、纬度排列;
2、在ARCMAP 中打开低图层,tools-add xy,x 选择经度,y 选择纬度;
3、将投影方式与底图设置成一致的;主要设置project;
4、确定,搞定多尝试几次,只要投影不出错,应该没什么问题;。
用R绘制采样点地图一例

用R绘制采样点地图一例# 绘制采样点分布图 version2# by Jinlong Zhang#************************setwd('C:/Users/admin/Desktop/map')# 请根据用户名设定工作路径#### 导入所需要的程序包library(sf)## Linking to GEOS 3.9.0, GDAL 3.2.1, PROJ 7.2.1library(tmap)library(tmaptools)library(sp)library(readxl)library(grid)rm(list = ls())## 读取地图country <- read_sf('bou2_4l.shp')# 设定投影st_crs(country) <- CRS(' proj=longlat datum=WGS84')sites <-read_excel('location.xlsx')# 编辑location.xlsx文件,给出采样点,注意经纬度不要颠倒head(sites)## # A tibble: 3 x 3## name_location longitude latitude## <chr> <dbl> <dbl>## 1 Beijing 116. 39.9## 2 Guangzhou 113. 23.1## 3 Harbin 127. 45.8coordinates(sites) <- ~ longitude latitudeproj4string(sites) <- CRS(' proj=longlat datum=WGS84')# 地图map1 <-tm_shape(country, # 经度范围ylim = c(18, 54), xlim = c(70, 140))tm_lines(col = 'darkgrey', lwd = 1)tm_layout(title = 'Sampling sites',legend.position = c('left', 'bottom'),inner.margins = c(0.12, 0.03, 0.08, 0.03))tm_shape(sites)tm_symbols(# 绘制采样点shape = 19,col = 'red',scale = 0.6,border.col = NA,title.shape = 'Sampling Sites',text = 'name_location',legend.col.show = TRUE)# 显示采样点地名tm_text(text = 'name_location',just = 'bottom', size = 0.8)# 添加经纬网tm_graticules(x = c(80, 90, 100, 110,120, 130, 140),y = c(0, 10, 20, 30,40, 50),lwd = 0.5, col = 'lightgrey')# 指北针tm_compass(type = 'arrow',position = c('left', 'top'))# 比例尺tm_scale_bar(position = c('left', 'bottom'))# 横轴tm_xlab('Longitude', size = 1)# 纵轴tm_ylab('Latitude', size = 1)# 南海诸岛小地图。
使用PyOpenGL绘制三维坐标系实例

使⽤PyOpenGL绘制三维坐标系实例我就废话不多说了,直接上代码吧!def drawCoordinate():'''绘制三维的坐标系,并绘制由坐标轴构成的平⾯的⽹格,各个坐标轴的颜⾊以及由坐标轴所引出的⽹格线的颜⾊为:x: (1.0, 0.0, 0.0)y: (0.0, 1.0, 0.0)z: (0.0, 0.0, 1.0):return:'''#设置⽹格线间的步长step = 0.2#设置⽹格线的数量、长度line_num = 15line_len = 4grid_color = [(1.0, 0.0, 0.0), (0.0, 1.0, 0.0), (0.0, 0.0, 1.0)]glLineWidth(3)origin = [0.0, 0.0, 0.0]#画出xyz轴for i in range(3):tmp = [0.0, 0.0, 0.0]tmp[i] = line_len*1.02glColor3f(*grid_color[i])glBegin(GL_LINES)glVertex3f(*origin)glVertex3f(*tmp)glEnd()# 画出由坐标轴构成的平⾯的⽹格glLineWidth(1)for i in range(3):#每次把⼀个坐标轴上引出的⽹格线都画出来,所以起点都是⼀致的start = [0.0, 0.0, 0.0]glColor3f(*grid_color[i])for j in range(line_num):end = [0.0, 0.0, 0.0]glBegin(GL_LINES)start[i] = start[i] + stepend[i] = start[i]for k in {0,1,2} - {i,}:end[k] = line_lenglVertex3f(*start)glVertex3f(*end)end[k] = 0.0glEnd()以上这篇使⽤PyOpenGL绘制三维坐标系实例就是⼩编分享给⼤家的全部内容了,希望能给⼤家⼀个参考,也希望⼤家多多⽀持。
第四章三维空间数据场的直接体绘制N#4-1

第四章三维空间数据场的直接体绘制第一节直接体会制的基本原理一直接体绘制方法产生的背景有关三维可视化的研究始于70年代中期,它是伴随着CT技术的产生和发展而发展起来的。
从70年代中期到70年代末,由于受当时CT技术发展水平的限制,切片之间的间距很大,因此早期的研究工作主要集中在轮廓连接(Contour Connection, Contour Tracking)或称为从平面轮廓线重建形体(Shape from Planer Contours,如图1,图2),其中具有代表性的是Keppel在1975年提出的用三角片拟合物体表面的方法。
这类重建方法需要解决断层图像上的轮廓抽取、层之间的轮廓对应和物体外表面的拟合等问题。
1979年,Herman和Liu提出了立方体方法(Cuberille),他们用物体边界处体素的表面拼接起来去代表物体表面。
总的来说,在这个时期,体可视化的基本思想已经初步建立起来,其中图像分割和重建方法对以后的研究都有一定的指导意义。
然而,也有许多问题没有解决好,象图像分割、轮廓连接中的对应问题和分叉问题以及显示图像质量低等。
当然,造成这种状况的部分原因是影象技术还不成熟,更主要的原因是因为图像分割和轮廓对应的本质决定了它们都是不适定的(Ill-posed, Ill-defined)问题。
图1 由二维轮廓线重建三维形体图2 陈矛,医学图像数据的三维重构及手术模拟的研究, 199880年代是体视化技术迅速发展的年代。
在这十年中,各种影象技术不断出现,如磁共振成像(MRI:Magnetic Resonance Imaging)、超声(US:Ultrasonography)、正电子辐射断层摄影(PET:positron Emission Tomography)和单光子辐射断层摄影(SPECT:Single Photon Emission Computed Tomography)等影象技术逐渐成熟。
如何绘制三维遥感地图

如何绘制三维遥感地图软件:Global Mapper 14、AutoCAD、PhotoShop、SketchUp(注:Global Mapper 14中文版下载安装后需在电脑“开始”里面的点击Global Mapper 14 chinese才能打开中文版,否则点桌面的快捷方式打开的仍然是英文版,可以删掉该快捷方式换成中文版的快捷图标。
)底图:从地理空间数据云下载相应地区的DEM数字高程数据(下载后无需解压),本文以ASTGTM_N32E109.img为例。
操作步骤:1、底图裁剪下载过来的地图一般范围较大,需要裁剪到适当的大小方便操作。
用GM14打开底图,找到相应的地区,缩放到适当大小,用数字化工具将相应地区框起来并命名,双击选中该框,然后Alt+C打开控制中心,选中底图那一图层,单击下方的选项一栏,在弹出来的选项框中单击羽化一栏,选中“羽毛在当前选中的多边形”这一项,边界像素大小选1-10为宜,点击确定后就能将地图裁剪到适宜的大小。
2、生成等高线在裁剪好的底图基础上,点击分析——>生成等高线,等高距可以任意设置,不过如果小于20的话,下面的数据是电脑算出来的,好像是插值法插的,那就没意义了,一般100或50,想精确就20。
其他的可以不用管。
点击确定,等软件生成等高线,生成速度与电脑性能和所选地区的大小有关。
生成地形图后可以通过禁用渲染法或者在控制中心将底图前面的√去掉以查看生成的地形图,如不需要看可直接跳过这一步。
点击文件——>输出——>输出矢量格式,选择DWG或DXF格式,命名保存。
在CAD中打开地形图,关闭其他图层,只留下地形图层,保存。
3、遥感图制作通过百度地图或谷歌地图将所在区域的遥感图截取出来(若地区范围较大,需要多截几张并在PS里面进行拼接),遥感图的四至范围要与CAD地形图的四至范围保持一致(大致范围的遥感图做好后导入CAD进行调整,与地形图位置重合后将遥感图的边框和地形图的边框打印保存成EPS格式文件,导入PS内进行遥感图边界裁剪),导出遥感图。
三坐标测量步骤
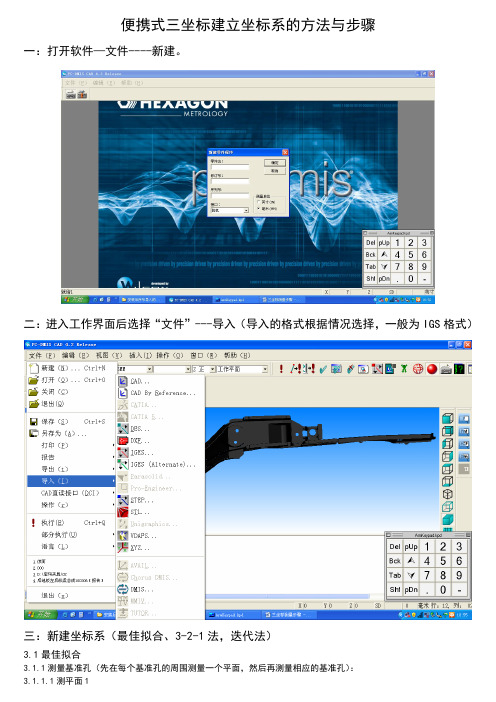
便携式三坐标建立坐标系的方法与步骤一:打开软件—文件----新建。
二:进入工作界面后选择“文件”---导入(导入的格式根据情况选择,一般为IGS格式)三:新建坐标系(最佳拟合、3-2-1法,迭代法)3.1最佳拟合3.1.1.2测基准孔1(选择“测量孔”选项----选择“平面1”---4点测量孔)特别注意:必须把需要测量的基准孔投影到相应平面3.1.1.3测量平面23.1.1.4测基准孔2(选择“测量孔”选项----选择“平面2”---4点测量孔)特别注意:必须把需要测量的基准孔投影到相应平面3.1.1.5 测量平面33.1.1.6 测基准孔3(选择“测量孔”选项----选择“平面3”---4点测量孔)特别注意:必须把需要测量的基准孔投影到相应平面3.1.2修改已测量的三个基准孔(圆1、圆2、圆3)的坐标值,快捷键F93.1.3建立坐标系Ctrl+Alt+A3.1.3评价测量结果单击图标,再在对话框里选择基准孔“圆1”,“圆2”,“圆3”,然后选择需要评价的项目,一般情况需要评价的项目为x、y、z、直径。
3.2 3-2-1建立坐标系方法:条件:已知两个孔及其中一个空的坐标和方向。
步骤:A.测量工作平面(6个点,每个孔投影面上两点,测量已知两孔,投影在工作平面3.2.1 建立坐标系3.2.1.1进入“建立坐标系”对话框,选择上一步所测量的工作平面,在“找正”对话框里选择该平面的方向x正、y正、z正、x负、y负或z负,然后找正平面,如下图。
3.2.1.2 旋转坐标选择测量的基准孔“圆1”与“圆2”,然后在“旋转到”对话框里选择“圆1”到“圆2”的矢量方向,再在“围绕”对话框里选择“找正”对话框中所示平面的方向,最后单击“旋转“。
3.2.1.3找原点选择已给定坐标的基准孔,如圆1,然后再分别把x、y、z的坐标值修改为该坐标值的负值,选择“原点”,再单击“CAD=工件”,最后单击“确定”完成坐标系的建立。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
采样点的三维空间坐标图绘制程序
d=data;%只需要从excel输入三列数据,格式为:[xi yi zi],i表示行数
x=d(:,1)%采样点坐标X值
y=d(:,2);;%采样点坐标Y值z=d(:,3)%采样点坐标Z(海拔)值
nx=linspace(min(x),max(x),100);
ny=linspace(min(x),max(y),100);
[xx,yy]=meshgrid(nx,ny);
zz=griddata(x,y,z,xx,yy,’v4’);
surfl(xx,yy,zz);
shading interp
colormap(gray);/view/e9ff9c76f46527d3240ce012.html
hold on
for i=1:319
for i=1:44
plot3(d(i,1),d(I,1),d(i,3),’ys’);
end
hold on
for i=45:80
plot3(d(I,1),d(I,2),d(I,3),’y+’);
end
hold on
for i=81:146
plot3(d(i,1),d(I,2),d(I,3),’bp’);
end
hold on
for i=147:284
plot3(d(I,1),d(I,2),d(I,3),’ko’);
end
hold on
for i=285:319
plot3(d(I,1),d(I,2),d(I,3),’r<’);
end
end
各重金属分布浓度等高线及采样点坐标综合分布图绘制程序;
d=data;%只需从excel输入三列数据,格式为:[xi yi zi],i表示行数,xi表示采样点坐标x的值,yi表示为采样点坐标y值,zi为某重金属浓度值(此程序需将第三列的值更换八次运行八次得到论文中八幅各重金属浓度等高线及采样点坐标综合分布图)。
x=d(:,1);%采样点坐标x值
y=d(:,2);%采样点坐标y值
z=d(:,3);%重金属浓度值
nx=linspace(min(x),max(x),40);
ny=linspace(min(y),max(y),40);
[xx,yy]=meshgrid(nx,ny);
zz=griddata(x,y,z,xx,yy,’v4’);
contour(xx,yy,zz,10);
hold on
for i=1:319
for i=1:44
plot(d(I,1),d(I,2),’bs’);
end
hold on
for i=45:80
plot(d(I,1),d(I,2),’b+’);
end
hold on
for i=81:146
plot(d(I,1),d(I,2),’bp’);
end
hold on
for i=147:284
plot(d(I,1),d(I,2),’ko’);
end
hold on
for i=285:319
plot(d(I,1),d(I,2),’r<’);
end
end
2种重金属的浓度等高线在该地区三维地形图曲面的投影图程序:
d=data;% 只需要从excel输入三列数据,格式为;[xi yi zi],i表示行数,xi为采样点坐标X值,yi为采样点坐标y值,zi为某重金属浓度值(此程序将第三列的值更换八次运行八次得到论文中八幅各重金属浓度等高线在该地区单位地形图曲面的投影图)。
x=d(:,1);
y=d(:,2);
z=d(:,3);
nx=linspace(min(x),max(x),100);
ny=linspace(min(y),max(y),100);
zz=griddata(x,y,z,xx,yy,’v4’);
surfl(xx,yy,zz);
shanding interp
colormap(gray);
hold on
d=data;
x=d(:,1);
y=d(:,2);
z=d(:,3);
nx=linspace(min(x),max(x),100);
ny=linspace(min(y),max(y),100);
[xx,yy]=meshgrid(nx,ny);
zz=griddata(x,y,z,xx,yy,’v4’);
[cc,hh]=contour(xx,yy,zz,10);
P=clabel(cc,hh)
For n=p’
Set(n,’string’,sprint(‘%.of’,get(n,’userdata’))) end。