11大众汽车总线系统方案
大众汽车车载CAN总线系统设计

大众汽车车载CAN总线系统设计摘要:随着汽车电子技术的持续发展,汽车上越来越多的应用电子设备,电子控制设备的联系更加复杂,而汽车的传统电气系统一般都是采用点对点的单一通信,联系较少,因此,庞大的布线系统之间的联系已经无法满足逐渐复杂的汽车控制系统的要求。
本文以大众汽车车载CAN总线车身控制系统为研究对象,介绍了国际汽车电子技术的现状和发展趋势,与目前主流的汽车网络技术相比,本文分析了目前流行的现场总线的性能及特点,研究了CAN总线的汽车车身控制系统。
介绍了系统的硬件设计和开发过程。
说明了每个节点的作用,说明了每个模块硬件电路结构。
介绍了系统的软件设计和开发过程。
该论文讲述了CAN通信模块的通信流程。
通过本设计,大众汽车车载CAN 总线车身控制系统可以满足现代车身控制的需要。
关键词:车载网络;大众汽车车载CAN总线;车身控制系统Volkswagen car CAN bus system designAbstract: with the continuous development of automobile electronic technology, more and more electronic equipment used in automobile, electronic control equipment is more and more complex, the relation between the traditional auto electrical system is mostly single point to point communication, connect with each other very few, so lead to the connection between the huge wiring system has far cannot satisfy the requirement of increasingly complex auto control system. Automobile LAN CAN bus, which are widely used in automotive electronic control system, in order to realize intelligent and networked control part provides effective ways and methods.This topic with CAN bus body control system as the research object, mainly to do the summary of a few aspects: introduce the current status and development trend of international automotive electronics technology, more mainstream in today's automotive network technology, a comprehensive analysis of the current popular features and performance of a variety of field bus, the further study of the CAN bus car body control system. Describes the hardware design and development of the system. According to the actual needs of the system, the design of each module of the system is determined. Detailed introduces the system function of each control node, describes the main control chip peripheral circuit, light control circuit, CAN communication module circuit, wiper control circuit, control circuit, window lock motor control circuit, the switch quantity detection circuit, electric rearview mirror control circuit hardware circuit for each module of the structure. Describes the software design and development process of the system. This article introduces the communication process for the CAN communication module.Key words: car network; vw vehicle CAN bus; Body control system;目录摘要 (I)Abstract (II)目录 (III)1 绪论 (1)1.1研究背景 (1)1.2 国内外研究现状 (1)1.3 本课题研究的目的和意义 (2)1.4 论文的主要内容 (2)2 CAN总线的工作原理 (4)2.1 CAN总线的特点 (4)2.2 CAN的分层结构 (4)2.3 CAN报文传输协议 (5)2.4 CAN节点的组成 (5)3 系统方案设计 (6)3.1车身控制系统的总体设计方案 (6)3.2车身控制系统各节点功能描述 (7)4 车身控制系统的硬件设计 (9)4.1 系统核心元器件选型 (9)4.1.1 微控制器芯片—MC9S08DZ16单片机 (9)4.1.2CAN总线驱动器—MC33388 (10)4.2系统硬件电路总体结构 (11)4.3系统各模块硬件电路的设计 (12)4.3.1单片机时钟及复位电路设计 (12)4.3.2电源模块电路设计 (13)4.3.3CAN节点通信电路设计 (14)4.3.4车窗的电机驱动电路设计 (15)4.3.5门锁电机驱动电路设计 (15)4.3.6后视镜电机驱动电路设计 (16)4.3.7雨刮电机驱动电路设计 (17)4.3.8车灯控制电路设计 (18)5 车身控制系统的软件设计 (20)5.1CAN通讯模块的软件设计 (20)5.1.1MSCAN模块的初始化 (20)5.1.2CAN数据报文的发送 (20)5.1.3CAN数据报文的接收 (21)6 结论与展望 (22)6.1全文总结 (23)6.2工作展望 (23)参考文献 (24)致谢 (25)1 绪论1.1研究背景当代汽车电子技术不断发展,电子装置的应用也越来越多。
关于大众CAN-BUS总线诊断系统(速腾、斯柯达一键升窗、舒适功能设定等

关于大众CAN-BUS总线诊断系统(速腾、斯柯达一键升窗、舒适功能设定等关于CAN-BUS总线诊断系统CAN是最新款大众、奥迪、SEAT和斯柯达汽车诊断通信的一种新方式。
不同于以前使用K线诊断通信的ISO9141系统,新CAN总线系统比以前的ISO9141系统要快得多(500 kbps与10.4 kbps的区别)。
运用CAN诊断必须要有新的硬件和软件。
诊断过程1.连接5053线至电脑2.发现新硬件,搜索驱动位置指向5053安装目录3.打开方向盘下面的储物盒,打开到最大角度,直到下不去了,用钥匙顶一下里面有个档片,这样盖子又能下来一定角度,注意用力要轻,免得档片断掉,断了我估计盖不上了吧。
大可不必把整个盖子拆下来。
4.一头连接至CAN-BUS接口,一头连接电脑启动软件5.启动vag-5053软件,注意一定要将车和电脑连接才能启动软件,否则软件将无法启动。
6.进入“系统配置”,确认COM端口为USB,点击测试,确认状态正常,最后点击“保存”。
7.进入“选择控制模块”8.进入相应的模块,比如需要修改“中央便利系统”,选择“46”,再选择“07重新编码”,点击“长编码帮助”。
提醒:操作前:请把原编码记下来,以后有问题可以改回来。
9.选择要打开的功能吧。
建议一次改一个,一个个功能试。
10.选择完毕,点击Transfer Coding,最后点击“确定”保存新的编码。
编辑本段新的功能速腾可以通过5053线调出的一些功能。
一键升窗先来解释一下“一键升窗”,原车在锁车后要一直按住摇控器锁键不能松手,没关的玻璃才会升到顶,按到中途松开遥控器玻璃窗就会停下来.现在更改编码后只要按一下键摇控的关门键玻璃窗就可以直接关上了。
注:可一键关闭所有的车窗,包括天窗。
1、舒适系统零件号为1K0 959 433 AM准备一条数据线,连上电脑,用5053软件进入到46,点击07单元,只要将原来的编码:19D8 02(08) 7F2D 8405 484F 01E0 11A0 改成 19D8 02(48) 7F2D 8405 484F 01E0 11A0,拔掉钥匙,打开车窗,然后锁车,按住锁车键不放,直到玻璃启动,放开锁车键,车窗玻璃仍然上升。
CAN总线详细教程大众车型
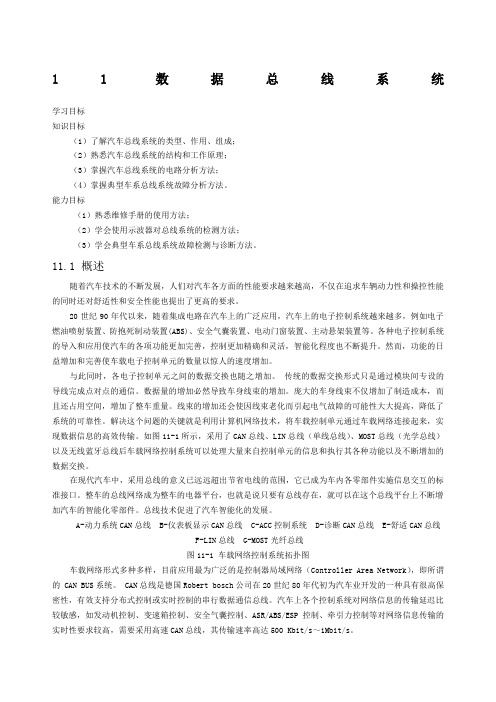
基于CAN总线的汽车电器网络结构
发动机 自动变 ABS/TCS 安全气 电控悬 巡航控 动力转 电机控 电池管
ECU 速器ECU ECU
囊ECU 架ECU 制ECU 向ECU 制ECU 理ECU
高速总线
E整EC整CU车U(车(控网控网制关制关器)器)
低速总线
故障诊断 ECU
灯光控 刮雨洗涤 电动座 门锁防 电动车 后视镜 气候控 警告信 仪表显 制ECU 控制ECU 椅ECU 盗ECU 窗ECU 喇叭ECU 制ECU 号ECU 示ECU
2001年,大众公司提高了Canbus的设计 标准,将舒适系统Canbus提高到 100Kbit/m, 驱动系统提高到500Kbit/m 。
98年在PASSAT和GOLF的驱动系统 上增加了Canbus,传送速率为 500Kbit/m。
2002年,大众集团在新PQ24平台上使用 带有车载网络控制单元的第三代Canbus 。
(6)通信速率最高可达1MB/s(此时距离最长40m)。
(7)节点数实际可达110个。
(8)采用短帧结构,每一帧的有效字节数为8个。
(9)每帧信息都有CRC校验及其他检错措施,数据出错率极低。
(10)通信介质可采用双绞线,同轴电缆和光导纤维,一般采用 廉价的双绞线即可,无特殊要求。
(11) 节点在错误严重的情况下,具有自动关闭总线的功能,切 断它与总线的联系,以使总线上的其他操作不受影响。
求
总之,使用汽车网络不仅可以减少线束,而且 能够提高各控制系统的运行可靠性,减少冗余 的传感器及相应的软硬件配置,实现各子系统 之间的资源共享,便于集中实现各子系统的在 线故障诊断。
Canbus的发展历史
大众公司首次在97年PASSAT的舒适系统 上采用了传送速率为62.5Kbit/m的 Canbus。
上海大众多路信息传输系统论文

上海大众车系多路传输系统原理介绍上海大众车系多路传输系统原理介绍一、概述1.1多路信息传输系统随着电子技术的迅速发展和在汽车上的广泛应用,汽车电子化程度越来越高。
从发动机控制到传动系控制,从行驶、制动、转向系控制到安全保证系统及仪表报警系统,从电源管理到为提高舒适性而作的各种努力,使汽车电子系统形成了一个复杂的大系统。
这些系统除了各自的电源线外,还需要互相通信,若采用常规的点——点间的布线方法进行布线,那么整个汽车的布线将会如一团乱麻,在这种情况下多路信息传输系统应运而生了。
多路传输是指在同一通道或线路上同时传输多条信息。
事实上数据信息是依次传输的。
但是数度非常快,似乎就是同一时间传输的。
多路信息传输系统布线方式如图1——1所示图1——1采用多路信息传输系统实现了信息传输的共享性,与传统布线方式相比,大大减少了线束的数量。
二、CAN总线系统2.1CAN总线介绍上海大众汽车多路信息传输系统采用的是CAN总线系统。
CAN是20世纪80年代中期由德国博世公司开发出来的一种车用现场总线。
由于使用CAN网络有许多优点,CAN现已作为很多现代汽车的标准设施。
CAN总线的优点如下:(1)总线功能有较高的可靠性和功能安全性,能大大减少因插头连接和导线所引起的故障。
(2)因导线减少而降低装配成本,并减轻线束质量。
(3)因采用较小的控制单元和插头而使空间节约下来,并使安装和修改更加容易。
(4)控制器之间的数据传输较快。
(5)系统诊断能力强。
(6)控制模块之间能共享传感器输入信息。
(7)实现多个模块参与复杂的汽车系统操作。
(8)使用网络能提高诊断能力。
一些模块允许模块的输入和输出信号通过网络由读码器检测。
(9)节点多,价格便宜。
(10)能满足很高的安全性要求。
(11)抗干扰能力强。
(12)安全的数据通信协议。
(13)减少CAN总线的导线数量。
(14)利用最少的传感器信号传输多用途的传感信号。
(15)控制单元和控制单元插角最少化应用,从而节省更多有用空间。
大众汽车总线系统组成驱动系统CAN总线高速ppt

CAN总线软件测试方法
01
CAN总线软件测试概 述
包括功能测试、性能测试、可靠性和 安全性测试等。
02
CAN总线软件测试工 具
包括CANoe、CANalyzer和台架试验 设备等,用于测试CAN总线软件的性 能和功能。
03
CAN总线软件测试内 容
包括通信测试、数据链路层测试、应 用层测试和诊断功能测试等。
传输介质
CAN总线采用双绞线作为传输介质,具有较高 的可靠性和抗干扰能力。
3
接收器
CAN接收器用于接收总线上的数据并将其传输 到控制器或执行器。
CAN总线的拓扑结构
星型结构
CAN总线系统中的节点以星型结构连接,每个节点都可以通过总线与控制器 进行通信。
网状结构
多个星型结构相互连接形成网状结构,提高系统的可靠性和容错能力。
物理层
02
CAN总线物理层包括传输线、终端电阻、光电耦合器等,用
于实现信号的传输和接收。
驱动器
03
CAN总线驱动器用于将控制器输出的电平信号转化为能够在
总线上传输的信号。
CAN总线硬件协议
CAN协议规定了在CAN总线上传输数据的格 式和规则,包括数据帧、远程帧、位填充等。
CAN协议还定义了节地址和寄存器地址,用于 标识CAN节点和存储器地址。
05
CAN总线可靠性设计
CAN总线的可靠性问题
电磁干扰(EMI)
CAN总线受到周围电磁信号的干 扰,导致数据传输错误。
故障安全问题
CAN总线系统可能会出现故障, 导致车辆运行不安全。
数据传输延迟
随着车辆控制系统的复杂性和集 成性的增加,CAN总线的数据传 输延迟问题越来越突出。
大众汽车车载网络系统概述

3.2.1 车载网络控制单元
p 车载网络控制单元安装于驾驶员侧仪表板饰件后。由于 装备不同,控制单元具有的功能也不同,因此插座的位置 也相应不同。
•车载网络控制单元
3.2.1 车载网络控制单元
n 1.负荷管理
p 在行驶中,大量舒适性装备和电热器,如座椅加热装置、后窗 加热装置、外后视镜加热和电子辅助加热装置等,会引起发电 机过载,进而导致蓄电池放电。这种现象尤其会出现在短途行 车和冬季行驶时,以及时停时走和装备过多的车辆中。考虑到 短时间用电器的电流需求,车载网络系统控制单元的负荷管理 系统会定期监控蓄电池电压。如果识别到车载网络系统中电压 不足,车载网络系统控制单元将会采取措施,以保持行驶能力 及车辆重新启动能力。如果电压降到12.2V以下,车载网络系 统控制单元将控制用电器暂时停止工作;如果重新达到标准电 压,车载网络系统控制单元会恢复元件工作。
大众汽车车载网络系统 概述
2020年4月24日星期五
内容提要
大众车系CAN网络类型
1. 大众车系CAN网络的类型
n 大众汽车的CAN总线系统设定为驱动系统、舒适系统 、信息系统、仪表系统、诊断系统这5个局域网。
• CAN系统的5个子系统
1.1 驱动系统CAN总线
p 驱动系统CAN总线由15号线激活,采用双线式数据总 线,其传输速率为500kbit/s,为高速CAN总线。
•诊断总线
•仪表总线 •驱动总线 •舒适总线 •信息总线
•网关
•诊断总线通过网关连接各控制器
•诊断接口定义
•针脚号 •1 •4 •5 •6 •7 • 14 • 15 • 16
对应的线束 15号线 接地 接地 CANBUS(高) k线 CANBUS(低) L线 30号线
大众汽车总线系统组成驱动系统CAN总线高速

4、驱动系统CANBUS波形及应用实例
舒适系统的波形
驱动系统的波形
J623:发动机控制单元; J533:网关; J492:四轮驱动控制单元; J104:ABS控制单元; J234:气囊控制单元; J500:助力转向控制单元; J587:换挡杆传感器控制 单元; J745:大灯控制单元; G85:转向角度传感器; 迈腾轿车的动力CAN系统 J527:转向柱控制单元
传输介 质
适用范 围 拓扑结 构 工作方 式
状态
采用
采用
采用
采用
采用
二、CAN系统
1、CANBUS 历史发展
序号 1 2 3 年代 1997年 1998年 2000年 CANBUS系统历史发展 大众公司首次在PASSAT的舒适系统上采用了传送速率为62.5 kbps的CANbus。 在PASSAT和GOLF的驱动系统上增加了CAN bus,传送速率为 500 kbps。 大众公司在PASSAT和GOLF采用了带有网关的第二代CAN bus。
4
网络休 眠
3、驱动系统与舒适系统总线区别
序号 1 项目 传输速率 驱动系统 500kbps 舒适系统 100kbps
2
3 4 5
无数据传输时 的基础电压
线色 线径 单线工作模式
约为2.5V
CAN-H为橙黑 CAN-L为橙棕 0.35mm2 无单线工作模式
CAN-H=0V CAN-L=5V(12V)
J527转向柱控制单元与E221多 功能方向盘之间采用LIN总线。 J393舒适系统控制单元与车辆倾 斜传感器G384、内部监控传感器 G273、防盗警报喇叭H12之间采用 LIN总线。 车载电源控制单元J519与G397 雨量及光强传感器和雨刮电动机控制 单元J400之间采用LIN总线。
大众车系车载网络

学习要求
了解大众车系采用CAN总线的过程;熟悉大众车系CAN网
络组成和特点;熟悉大众车系• 驱动系统CAN总线组成;熟悉
大众车系舒适系统CAN总线组成;熟悉大众车系的网关和作
用;熟悉大众车系自诊断和诊断仪的使用。熟悉大众波罗轿
车车载网络系统的组成和特点;熟悉大众波罗轿车驱动系统
CAN总线、舒适系统CAN总线、网关、遥控钥匙、节约能源功
二、波罗轿车CAN总线
1.上海大众车系CAN总线的颜色
上海大众车系总线的颜色• 比较统一,不同类型总线的颜
色如下:
① 驱动系统CAN总线颜色:CAN-H线为橙色或黑色,
CAN-L线为橙色或棕色。
② 舒适系统CAN总线颜色:CAN-H线为橙色或绿色,
CAN-L线为橙色或棕色。
③ 信息系统CAN总线颜色:CAN-H线为橙色或紫色,
仪(具有数字存储式示波器DSO功能)显示。其中,DSO设置纵坐
标为0.5V/Div,横坐标为0.02m• s/Div。
图6-5 驱动系统CAN总线的信号变化
四、舒适系统CAN总线
舒适系统CAN总线的组成如图6-6所示。舒适系统CAN总线
由30号线激活,采用双线式数• 据总线,CAN驱动数据总线的
CAN-H线和CAN-L线来进行数据交换,其传输速率为l00kbit/s
倒车灯控制等功能。
车载网络控制单元8安装于驾驶员侧仪表板饰件后。由
于装备不同,控制单元具有的功能也不同,因此插座的位置
也相应不同。
•
•
图6-13 波罗轿车车载网络系统的组成 1-收音机、无线电导航装置;2-前座乘客侧车门控制单元;3-活动天窗调节控制单元;4-右 后车门控制单元;5-仪表;6-左后侧车门控制单元;7-驾驶员侧车门控制单元;8-带网关的车 载网络控制单元;9-发动机控制单元;10-舒适系统中央控制单元;11-自动变速器控制单元; 12-转向辅助控制单元;13-安全气囊控制单元;14-自动空调控制单元;15-ABS控制单元
关于大众CAN-BUS总线诊断系统(速腾、斯柯达一键升窗、舒适功能设定等
关于大众CAN-BUS总线诊断系统(速腾、斯柯达一键升窗、舒适功能设定等关于CAN-BUS总线诊断系统CAN是最新款大众、奥迪、SEAT和斯柯达汽车诊断通信的一种新方式。
不同于以前使用K线诊断通信的ISO9141系统,新CAN总线系统比以前的ISO9141系统要快得多(500 kbps与10.4 kbps的区别)。
运用CAN诊断必须要有新的硬件和软件。
诊断过程1.连接5053线至电脑2.发现新硬件,搜索驱动位置指向5053安装目录3.打开方向盘下面的储物盒,打开到最大角度,直到下不去了,用钥匙顶一下里面有个档片,这样盖子又能下来一定角度,注意用力要轻,免得档片断掉,断了我估计盖不上了吧。
大可不必把整个盖子拆下来。
4.一头连接至CAN-BUS接口,一头连接电脑启动软件5.启动vag-5053软件,注意一定要将车和电脑连接才能启动软件,否则软件将无法启动。
6.进入“系统配置”,确认COM端口为USB,点击测试,确认状态正常,最后点击“保存”。
7.进入“选择控制模块”8.进入相应的模块,比如需要修改“中央便利系统”,选择“46”,再选择“07重新编码”,点击“长编码帮助”。
提醒:操作前:请把原编码记下来,以后有问题可以改回来。
9.选择要打开的功能吧。
建议一次改一个,一个个功能试。
10.选择完毕,点击Transfer Coding,最后点击“确定”保存新的编码。
编辑本段新的功能速腾可以通过5053线调出的一些功能。
一键升窗先来解释一下“一键升窗”,原车在锁车后要一直按住摇控器锁键不能松手,没关的玻璃才会升到顶,按到中途松开遥控器玻璃窗就会停下来.现在更改编码后只要按一下键摇控的关门键玻璃窗就可以直接关上了。
注:可一键关闭所有的车窗,包括天窗。
1、舒适系统零件号为1K0 959 433 AM准备一条数据线,连上电脑,用5053软件进入到46,点击07单元,只要将原来的编码:19D8 02(08) 7F2D 8405 484F 01E0 11A0 改成 19D8 02(48) 7F2D 8405 484F 01E0 11A0,拔掉钥匙,打开车窗,然后锁车,按住锁车键不放,直到玻璃启动,放开锁车键,车窗玻璃仍然上升。
大众汽车车载CAN总线系统设计
大众汽车车载CAN总线系统设计大众汽车车载CAN总线系统设计摘要:随着汽车电子技术的持续发展,汽车上越来越多的应用电子设备,电子控制设备的联系更加复杂,而汽车的传统电气系统一般都是采用点对点的单一通信,联系较少,因此,庞大的布线系统之间的联系已经无法满足逐渐复杂的汽车控制系统的要求。
本文以大众汽车车载CAN总线车身控制系统为研究对象,介绍了国际汽车电子技术的现状和发展趋势,与目前主流的汽车网络技术相比,本文分析了目前流行的现场总线的性能及特点,研究了CAN总线的汽车车身控制系统。
介绍了系统的硬件设计和开发过程。
说明了每个节点的作用,说明了每个模块硬件电路结构。
介绍了系统的软件设计和开发过程。
该论文讲述了CAN通信模块的通信流程。
通过本设计,大众汽车车载CAN 总线车身控制系统可以满足现代车身控制的需要。
关键词:车载网络;大众汽车车载CAN总线;车身控制系统Volkswagen car CAN bus system designAbstract: with the continuous development of automobile electronic technology, more and more electronic equipment used in automobile, electronic control equipment is more and more complex, the relation between the traditional auto electrical system is mostly single point to point communication, connect with each other very few, so lead to the connection between the huge wiring system has far cannot satisfy the requirement of increasingly complex auto control system. Automobile LAN CAN bus, which are widely used in automotive electronic control system, in order to realize intelligent and networked control part provides effective ways and methods.This topic with CAN bus body control system as the research object, mainly to do the summary of a few aspects: introduce the current status and development trend of internationalautomotive electronics technology, more mainstream in today's automotive network technology, a comprehensive analysis of the current popular features and performance of a variety of field bus, the further study of the CAN bus car body control system. Describes the hardware design and development of the system. According to the actual needs of the system, the design of each module of the system is determined. Detailed introduces the system function of each control node, describes the main control chip peripheral circuit, light control circuit, CAN communication module circuit, wiper control circuit, control circuit, window lock motor control circuit, the switch quantity detection circuit, electric rearview mirror control circuit hardware circuit for each module of the structure. Describes the software design and development process of the system. This article introduces the communication process for the CAN communication module.Key words: car network; vw vehicle CAN bus; Body control system;目录摘要 (I)Abstract ............................................................... II 目录.................................................................III 1 绪论 (1)1.1研究背景 (1)1.2 国内外研究现状 (1)1.3 本课题研究的目的和意义 (2)1.4 论文的主要内容 (2)2 CAN总线的工作原理 (4)2.1 CAN总线的特点 (4)2.2 CAN的分层结构 (4)2.3 CAN报文传输协议 (5)2.4 CAN节点的组成 (5)3 系统方案设计 (6)3.1车身控制系统的总体设计方案 (6)3.2车身控制系统各节点功能描述 (7)4 车身控制系统的硬件设计 (9)4.1 系统核心元器件选型 (9)4.1.1 微控制器芯片—MC9S08DZ16单片机 (9)4.1.2CAN总线驱动器—MC33388 (10)4.2系统硬件电路总体结构 (11)4.3系统各模块硬件电路的设计 (12)4.3.1单片机时钟及复位电路设计 (12)4.3.2电源模块电路设计 (13)4.3.3CAN节点通信电路设计 (14)4.3.4车窗的电机驱动电路设计 (15)4.3.5门锁电机驱动电路设计 (15)4.3.6后视镜电机驱动电路设计 (16)4.3.7雨刮电机驱动电路设计 (17)4.3.8车灯控制电路设计 (18)5 车身控制系统的软件设计 (20)5.1CAN通讯模块的软件设计 (20)5.1.1MSCAN模块的初始化 (20)5.1.2CAN数据报文的发送 (20)5.1.3CAN数据报文的接收 (21)6 结论与展望 (22)6.1全文总结 (23)6.2工作展望 (23)参考文献 (24)致谢 (25)1 绪论1.1研究背景当代汽车电子技术不断发展,电子装置的应用也越来越多。
11大众汽车总线系统

11数据总线系统学习目标知识目标(1)了解汽车总线系统的类型、作用、组成;(2)熟悉汽车总线系统的结构和工作原理;(3)掌握汽车总线系统的电路分析方法;(4)掌握典型车系总线系统故障分析方法。
能力目标(1)熟悉维修手册的使用方法;(2)学会使用示波器对总线系统的检测方法;(3)学会典型车系总线系统故障检测与诊断方法。
11.1 概述随着汽车技术的不断发展,人们对汽车各方面的性能要求越来越高,不仅在追求车辆动力性和操控性能的同时还对舒适性和安全性能也提出了更高的要求。
20世纪90年代以来,随着集成电路在汽车上的广泛应用,汽车上的电子控制系统越来越多,例如电子燃油喷射装置、防抱死制动装置(ABS)、安全气囊装置、电动门窗装置、主动悬架装置等。
各种电子控制系统的导入和应用使汽车的各项功能更加完善,控制更加精确和灵活,智能化程度也不断提升。
然而,功能的日益增加和完善使车载电子控制单元的数量以惊人的速度增加。
与此同时,各电子控制单元之间的数据交换也随之增加。
传统的数据交换形式只是通过模块间专设的导线完成点对点的通信。
数据量的增加必然导致车身线束的增加。
庞大的车身线束不仅增加了制造成本,而且还占用空间,增加了整车重量。
线束的增加还会使因线束老化而引起电气故障的可能性大大提高,降低了系统的可靠性。
解决这个问题的关键就是利用计算机网络技术,将车载控制单元通过车载网络连接起来,实现数据信息的高效传输。
如图11-1所示,采用了CAN 总线、LIN总线(单线总线)、MOST总线(光学总线)以及无线蓝牙总线后车载网络控制系统可以处理大量来自控制单元的信息和执行其各种功能以及不断增加的数据交换。
在现代汽车中,采用总线的意义已远远超出节省电线的范围,它已成为车内各零部件实施信息交互的标准接口。
整车的总线网络成为整车的电器平台,也就是说只要有总线存在,就可以在这个总线平台上不断增加汽车的智能化零部件。
总线技术促进了汽车智能化的发展。
大众汽车总线系统
11数据总线系统学习目标知识目标(1)了解汽车总线系统的类型、作用、组成;(2)熟悉汽车总线系统的结构和工作原理;(3)掌握汽车总线系统的电路分析方法;(4)掌握典型车系总线系统故障分析方法。
能力目标(1)熟悉维修手册的使用方法;(2)学会使用示波器对总线系统的检测方法;(3)学会典型车系总线系统故障检测与诊断方法。
11.1 概述随着汽车技术的不断发展,人们对汽车各方面的性能要求越来越高,不仅在追求车辆动力性和操控性能的同时还对舒适性和安全性能也提出了更高的要求。
20世纪90年代以来,随着集成电路在汽车上的广泛应用,汽车上的电子控制系统越来越多,例如电子燃油喷射装置、防抱死制动装置(ABS)、安全气囊装置、电动门窗装置、主动悬架装置等。
各种电子控制系统的导入和应用使汽车的各项功能更加完善,控制更加精确和灵活,智能化程度也不断提升。
然而,功能的日益增加和完善使车载电子控制单元的数量以惊人的速度增加。
与此同时,各电子控制单元之间的数据交换也随之增加。
传统的数据交换形式只是通过模块间专设的导线完成点对点的通信。
数据量的增加必然导致车身线束的增加。
庞大的车身线束不仅增加了制造成本,而且还占用空间,增加了整车重量。
线束的增加还会使因线束老化而引起电气故障的可能性大大提高,降低了系统的可靠性。
解决这个问题的关键就是利用计算机网络技术,将车载控制单元通过车载网络连接起来,实现数据信息的高效传输。
如图11-1所示,采用了CAN总线、LIN总线(单线总线)、MOST总线(光学总线)以及无线蓝牙总线后车载网络控制系统可以处理大量来自控制单元的信息和执行其各种功能以及不断增加的数据交换。
在现代汽车中,采用总线的意义已远远超出节省电线的范围,它已成为车内各零部件实施信息交互的标准接口。
整车的总线网络成为整车的电器平台,也就是说只要有总线存在,就可以在这个总线平台上不断增加汽车的智能化零部件。
总线技术促进了汽车智能化的发展。
大众汽车车载CAN总线系统设计开题报告

开题报告
开题报告
对小型直流电动机的速度控制采用PWM调速,控制平台接收操作人员给出的PWM的占空比,然后把含有占空比的控制信息发送给指定的节点。
节点MCU接收到控制信息后,首先分析该控制信息的性质,然后根据控制信息做出相应的操作。
当接收到含有占空比的控制信息,MCU就改变输出的PWM信号的占空比,该PWM信号经放大后用来驱动电机,达到调速的目的。
速度的测量使用霍尔效应传感器。
霍尔效应传感器感应的电机的转动产生脉冲信号,经放大后送MCU计数,MCU计数一秒得到电机的转速,MCU把数据打包上传到CAN总线。
Node-1从总线上接收到的数据,控制平台实时显示。
2.通过本课题要完成的目的:
1 综合运用CAN总协议。
2 提高自己分析与解决问题的能力,初步形成科学研究的能力。
3研究分析车载CAN总线网络系统的组成结构及功能的特点。
4对车载CAN总线网络应用方案予以总结。
5利用单片机和CAN控制器元器件,设计和开发CAN总线测控节,并于原车舒适系统的CAN总线网络匹配。
6完善和改进原车身舒适系统的CAN总线控制功能及其存在的不足。
7提升原车身舒适系统的安全与舒适性。
开题报告。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
11数据总线系统学习目标知识目标(1)了解汽车总线系统的类型、作用、组成;(2)熟悉汽车总线系统的结构和工作原理;(3)掌握汽车总线系统的电路分析方法;(4)掌握典型车系总线系统故障分析方法。
能力目标(1)熟悉维修手册的使用方法;(2)学会使用示波器对总线系统的检测方法;(3)学会典型车系总线系统故障检测与诊断方法。
11.1 概述随着汽车技术的不断发展,人们对汽车各方面的性能要求越来越高,不仅在追求车辆动力性和操控性能的同时还对舒适性和安全性能也提出了更高的要求。
20世纪90年代以来,随着集成电路在汽车上的广泛应用,汽车上的电子控制系统越来越多,例如电子燃油喷射装置、防抱死制动装置(ABS)、安全气囊装置、电动门窗装置、主动悬架装置等。
各种电子控制系统的导入和应用使汽车的各项功能更加完善,控制更加精确和灵活,智能化程度也不断提升。
然而,功能的日益增加和完善使车载电子控制单元的数量以惊人的速度增加。
与此同时,各电子控制单元之间的数据交换也随之增加。
传统的数据交换形式只是通过模块间专设的导线完成点对点的通信。
数据量的增加必然导致车身线束的增加。
庞大的车身线束不仅增加了制造成本,而且还占用空间,增加了整车重量。
线束的增加还会使因线束老化而引起电气故障的可能性大大提高,降低了系统的可靠性。
解决这个问题的关键就是利用计算机网络技术,将车载控制单元通过车载网络连接起来,实现数据信息的高效传输。
如图11-1所示,采用了CAN 总线、LIN总线(单线总线)、MOST总线(光学总线)以及无线蓝牙总线后车载网络控制系统可以处理大量来自控制单元的信息和执行其各种功能以及不断增加的数据交换。
在现代汽车中,采用总线的意义已远远超出节省电线的围,它已成为车各零部件实施信息交互的标准接口。
整车的总线网络成为整车的电器平台,也就是说只要有总线存在,就可以在这个总线平台上不断增加汽车的智能化零部件。
总线技术促进了汽车智能化的发展。
A-动力系统CAN总线 B-仪表板显示CAN总线 C-ACC控制系统 D-诊断CAN总线 E-舒适CAN总线 F-LIN总线 G-MOST光纤总线图11-1 车载网络控制系统拓扑图车载网络形式多种多样,目前应用最为广泛的是控制器局域网络(Controller Area Network),即所谓的 CAN BUS系统。
CAN总线是德国Robert bosch公司在20世纪80年代初为汽车业开发的一种具有很高保密性,有效支持分布式控制或实时控制的串行数据通信总线。
汽车上各个控制系统对网络信息的传输延迟比较敏感,如发动机控制、变速箱控制、安全气囊控制、ASR/ABS/ESP控制、牵引力控制等对网络信息传输的实时性要求较高,需要采用高速CAN总线,其传输速率高达500 Kbit/s~1Mbit/s。
LIN(Local Interconnect Network,局部互联网络)是一种低成本的串行通讯网络,用于实现汽车中的分布式电子系统控制。
局部互连指的是所有控制单元被安装在一个有限的结构空间(如车顶),它也被祢为“局部子系统”,如图11-2所示。
LIN总线是CAN在低端应用的延伸,是价格相对便宜且速度较慢的子网。
空调控制、仪表控制、刮水器控制、照明控制、门窗控制等需要采用低速LIN总线,其传输速率为1~20Kbit/s。
低速LIN总线对信息传输的实时性要求不高,但子系统数量较多,将这些低速子系统与高速子系统分开,有利于保证高速子系统的实时性,同时还可以降低成本。
图11-2 LIN局部互联网在LIN总线系统中,LIN总线是一根单线总线,导线基本颜色(紫色)和识别颜色。
一辆汽车中各个LIN总线系统之间的数据交换是通过CAN数据总线进行的,而且每一次之交换一个控制单元的数据。
LIN总线系统允许一个LIN主控制单元和最多16个LIN从属控制单元之间进行数据交换。
MOST总线(Media Oriented Systems Transport)是一种光纤数据总线系统,该数据总线系统起源于“面向媒体的系统传送合作组织”。
这是一个许多汽车制造厂、零部件供应商及软件开发商组成的协会,其目的是要开发出一个标准的高速数据传送系统。
“面向媒体的系统传送”代表一个以地址为本的信息被传送到特定接收机的数据传送网络,这一技术被用在大众奥迪汽车中来传递多媒体互动的系统数据,如图11-3所示。
图11-3 奥迪多媒体互动系统图11-4 多媒体互动系统传送率要求如图11-4所示,多媒体互动系统传送视频和音频信息需要很多Mbit/s的传送率,如传送立体声的数字式电视信号需要约为6 Mbit/s的传送率,但当前使用的CAN数据总线发送数据的速度不够快(最快速度1Mbit/s),不能满足大量数据传送的要求。
然而,MOST总线允许的传送率可达21.2 Mbit/s,因此光学数据传送是传播复杂的多媒体系统的适当手段。
光学MOST总线除了使用较少导线和重量较轻之外,光波传送具有极高的数据传送率,它可以在相关的部件之间以数字的形式交换数据。
与无线电波相比,光波的波长很短,而且既不产生电磁干扰波,对电磁干扰波也不敏感。
因此,光学MOST总线还具有高级别的抗干扰性能。
11.2典型数据总线结构如图11-5 所示,是典型数据总线拓扑结构图。
构与城市交通枢纽结构类似,网关是整个网络的核心,不同类型的CAN总线、FlexRay总线、以及MOST总线均通过网关进行数据交换。
在CAN总线网络是级别稍低一级的LIN总线,承担该特定CAN总线网络部的功能。
这几种类型的总线各有特点,网络数据传输速度与数据容量各不相同,满足了不同的子系统的独特需求。
图11-5 车载网络系统结构示意图1. 舒适总线K-CAN结构与组成1-雨刮电机CM 2-大灯总成开关 3-雨量传感器 4-车身控制单元1(BCM1) 5-转向柱调节开关 6-车库门开启按钮 7-部防盗监控传感器 8-部湿度传感器 9-车身控制单元2BCM2 10-一键启动按钮 11-电子方向柱锁 12-空气质量传感器/车外湿度传感器 13-制冷剂压力传感器 14-车库门开启发射器 15-驾驶模式开关 16-部灯光模块 17-防盗蜂鸣器 18-驾驶员座椅记忆CM 19-乘客座椅记忆CM 20-后排座椅记忆CM(左后) 21-后排座椅记忆CM(右后) 22-驾驶员侧车门CM 23-乘客侧车门CM 24-追踪系统接口 25-后备箱锁CM 26-驾驶员侧电动座椅CM 27-乘客侧电动座椅CM 28-左后侧电动座椅CM 29-右后侧电动座椅CM 30-电动座椅开关总成 31-电动座椅开关总成 32-后部座椅按摩按钮 33-左后门CM 34-右后门CM 35-车辆追踪系统图11-6 舒适总线K-CAN结构如图11-6所示,K-CAN网络部有数量众多的LIN总线网络。
LIN的目标是为现有汽车网络(如CAN总线) 提供辅助功能。
因此,LIN总线是一种辅助的总线网络,在不需要CAN总线的传输速度和多功能的场合,比如智能传感器和智能电机之间的通信,使用LIN总线,可大大节省成本。
LIN总线最大的特点是有主、从机之分,以LIN1网络为例,BCM1(模块4)是该LIN网络的主机,可以对LIN1网络的所有从机发送指令;雨刮电机、大灯总成开关和雨量传感器作为LIN1的从机,向BCM1发送信号,或者接受BCM1的动作指令,受BCM1的控制。
LIN网络通常位于电气网络的最底层,只能通过LIN主机接合到整个电气系统,进行信号与数据的相互交换,LIN从机一般由传感器、电磁线圈或执行电机构成,处于整个电气系统的最边缘末端。
2.动力总线、FlexRay总线、网关的结构与组成36-座椅乘员探测系统PODS 37-换挡杆CM 38-发动机控制单元ECM 39-电子手刹 40-转向角度传感器 41-安全气囊CM 42-变速箱CM 43-仪表板仪表盘 44-多功能方向盘按钮 45-仪表板驾驶信息显示 46-转向柱CM 47-空气质量传感器 48-胎压监控系统 49-倒车影像 50- HVAC 51-后部HVAC 52-风门电机1-16(HVAC) 53-驻车加热 54-风门电机1-5(HVAC) 55-鼓风机控制10A 56-鼓风机控制30A 57-风门电机1-7(HVAC) 58-自适应巡航(主CM) 59-自适应巡航(从CM)60-自适应空气悬架CM 61-电子稳定系统(ESP) 62- SARA 63-发电机 64-电池监控系统图11-7 网关、D-CAN、A-CAN、G-CAN以及FlexRay总线结构示意图如图11-7所示,FlexRay总线是一种由全球围几家主流汽车制造商组成的联盟所缔结的新一代网络传输协议,主要用来满足现代车辆对于网络更快传输速度以及更大传输容量的要求,在下面的FlexRay总线一章中,会详细介绍。
3.信息娱乐MOST总线结构与组成65-信息娱乐系统主单元 66- CD/DVD换碟机 67-仪表显示单元DIP 68- TV调谐 69-收音机 70-后座娱乐系统(RSE) 71-音响功率放大器 72-中央显示屏 73-控制面板(信息娱乐系统) 74-话筒 75-扬声器 76-显示屏(RSE) 77-控制面板(RSE)图11-8 MOST总线结构示意图如图11-8所示,MOST总线同样也是由全球围几家主流汽车制造商组成的联盟MOST组织(Media Oriented Systems Transport (MOST) Cooperation)所缔结的新一代网络传输协议,从字面意义上就可以看出,MOST总线是面向媒体容传输的网络总线,主要用来传输车载娱乐系统的音频、视频与导航数据信息。
从图四可以看出,MOST总线有着独特的环形结构。
MOST网络的传播介质也与其他几种类型的网络不同,不是CAN总线标志性的双绞线,而是采用光纤电缆进行数据的交换。
有关MOST总线的详细容,在后面的章节中也会做详细介绍。
4. 网关Gateway如图11-9、图11-10所示,网关也经常被叫做网络接口(interface),是各种总线网络之间进行数据交换的“中转枢纽”,因为每个总线网络之的数据传输协议各不相同,好比是火车只能在铁轨上奔跑,而不能在公路上或者是山区的小路上运行一样。
以倒车辅助系统工作原理为例:车主在挂倒档的同时,换挡杆CM(37)通过G-CAN将R档信号发送至TCM(42),位于A-CAN上的TCM无法直接把R档信号传输给倒车影像CM(49),需要先将R档信号发送至网关,经过网关的数据协议转换,才能发送至D-CAN上。
位于D-CAN上的倒车影像这个时候才能够收到换挡杆CM发出的R档信号,开始工作。
倒车影像系统采集到的图像容也不能之间发送至位于MOST网络上的中央显示屏,同样也必须经过网关的协议转换,才能发生至MOST网络上。