机械原理习题课-凸轮.docx
机械原理大作业2凸轮(18题)
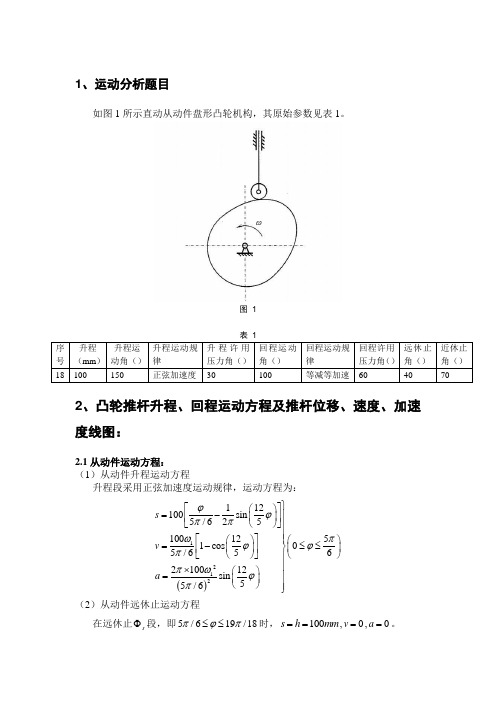
1、运动分析题目如图1所示直动从动件盘形凸轮机构,其原始参数见表1。
图 1表 1序号 升程 (mm ) 升程运动角() 升程运动规律 升程许用压力角() 回程运动角()回程运动规律 回程许用压力角() 远休止角() 近休止角()18 100150正弦加速度 30 100等减等加速 6040702、凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图:2.1从动件运动方程:(1)从动件升程运动方程升程段采用正弦加速度运动规律,运动方程为:()1212112100sin 5/6251001251cos 05/656210012sin 55/6s v a ϕϕππωπϕϕππωϕπ⎫⎡⎤⎛⎫=-⎪⎪⎢⎥⎝⎭⎣⎦⎪⎪⎡⎤⎪⎛⎫⎛⎫=-≤≤⎬ ⎪⎪⎢⎥⎝⎭⎝⎭⎣⎦⎪⎪⨯⎛⎫⎪= ⎪⎝⎭⎪⎭(2)从动件远休止运动方程在远休止s Φ段,即5/619/18πϕπ≤≤时,100s h mm ==,0v =,0a =。
(3)从动件回程运动方程升程段采用等减等加运动规律,运动方程为:()221221220019100518()94001919/184/3518()94005()9s v a πϕπωπϕπϕππωπ⎫⎪⎡⎤=--⎪⎢⎥⎣⎦⎪⎪⎪⎪⎡⎤=--≤≤⎬⎢⎥⎣⎦⎪⎪⎪⎪=-⎪⎪⎭()221221220029()518()94002()4/329/1853()94005()9s v a πϕπωπϕπϕππωπ⎫⎪=-⎪⎪⎪⎪⎪=--≤≤⎬⎪⎪⎪⎪=⎪⎪⎭(4)从动件近休止运动方程在近休止s 'Φ段,即29/182πϕπ≤≤时,0s =,0v =,0a =。
2.2推杆位移、速度、加速度线图:(1)推杆位移线图图 2 推杆位移线图(2)推杆速度线图图 3 推杆速度线图(3)推杆加速度线图图 4 推杆加速度线图3、凸轮机构的ds s d ϕ-线图,并由此确定凸轮的基圆半径和偏距:图 5 凸轮机构的dss d ϕ-线图 4滚子半径的确定及凸轮理论廓线和实际廓线的绘制 4.1凸轮的理论轮廓方程为:00()cos sin (02)()sin cos x s s e y s s e ϕϕϕπϕϕ=+-⎫≤≤⎬=++⎭式中,220031.45s r e mm =-=(1)推程凸轮轮廓方程:11231100sin cos 18sin 5/625(05/6)112(31100sin )sin 18cos 5/625x y ϕϕϕϕππϕπϕϕϕϕππ⎫⎧⎫⎡⎤⎛⎫=+--⎨⎬⎪⎪⎢⎥⎝⎭⎣⎦⎪⎩⎭≤≤⎬⎡⎤⎛⎫⎪=+-+ ⎪⎢⎥⎪⎝⎭⎣⎦⎭(2)远休止凸轮轮廓方程:131cos 18sin (5/619/18)131sin 18cos x y ϕϕπϕπϕϕ=-⎫≤≤⎬=+⎭(3)回程凸轮轮廓方程:222220019131cos 18sin 518()9(19/184/3)20019131sin 18cos 518()9x y πϕϕϕππϕππϕϕϕπ⎫⎧⎫⎪⎪⎪⎡⎤=---⎪⎨⎬⎢⎥⎣⎦⎪⎪⎪⎩⎭⎪≤≤⎬⎧⎫⎪⎪⎪⎡⎤⎪=--+⎨⎬⎢⎥⎪⎣⎦⎪⎪⎪⎩⎭⎭22222002931()cos 18sin 518()9(19/184/3)2002931()sin 18cos 518()9x y πϕϕϕππϕππϕϕϕπ⎫⎧⎫⎪⎪⎪=+--⎪⎨⎬⎪⎪⎪⎩⎭⎪≤≤⎬⎧⎫⎪⎪⎪⎪=+-+⎨⎬⎪⎪⎪⎪⎩⎭⎭(4)近休止凸轮轮廓方程:31cos 18sin (29/182)31sin 18cos x y ϕϕπϕπϕϕ=-⎫≤≤⎬=+⎭4.2凸轮理论轮廓曲线为:图 6 凸轮理论轮廓由上图可编程可求其最小曲率半径为min 10.309110mm ρ=≈,所以滚子半径min 1037r r mm ρ=-∆=-=。
机械原理大作业二凸轮(完整版) 20
Harbin Institute of Technology机械原理大作业二作业名称:凸轮机构设计设计题目: 20 院系:机电工程学院班级:设计者:学号:指导教师:**设计时间: 2014年5月哈尔滨工业大学一、设计题目如图1所示直动从动件盘形凸轮机构,其原始参数见表1。
表1 凸轮机构参数升程/h mm 升程运动角 0/ϕ 升程运动规律 升程许用压力角[]/α 回程运动角 0/ϕ'回程运动规律 回城许用压力角[]/α'远休止角/s ϕ 近休止角/s ϕ' 110 120 正弦加速度 3590 正弦加速度 65 50 100二、运动方程式及运动线图本实验假设凸轮逆时针旋转。
1.确定凸轮机构推杆升程、回程运动方程(ϕ为凸轮转角,ω为凸轮角速度)。
推程(余弦加速度)(203ϕπ≤≤): 图1远休止段:当21738πϕπ≤≤时,110s h==,0v=,0a=回程(正弦加速度)(171389πϕπ≤≤):近休止段:当1329πϕπ≤≤时,0s=,0v=,0a=2.绘制推杆位移、速度、加速度线图图2三、绘制凸轮机构的ds s d ϕ-线图,并由此确定凸轮的基圆半径和偏距图3图4如图3、图4所示,在ds d ϕ轴正侧(对应于推程),以tan(90[])α-为斜率做ds s d ϕ-曲线的切线1L ,在ds d ϕ轴负侧(对应于回程),以tan(90[])α'+为斜率做ds s d ϕ-曲线的切线2L ,再过点(0,0)O 做斜率为tan(90[])α+的直线3L ,则直线1L 、2L 、3L 与s 轴的夹角分别为[]α、[]α'、[]α。
显然,1L 、2L 、3L 三条直线下方的公共部分即为满足推程压力角不超过[]α和回程压力角不超过[]α'时,凸轮回转中心的可取区域。
记直线1L 与2L 的交点为12P ,直线1L 与3L 的交点为13P ,则最小基圆半径013r OP ==45.79mm ,对应的偏距e =26.27mm (点13P 到s 轴的距离),2200s r e =-=37.51mm 。
机械原理凸轮机构习题与答案(五篇材料)
机械原理凸轮机构习题与答案(五篇材料)第一篇:机械原理凸轮机构习题与答案解:曲柄的存在的必要条件是1)最短杆与追长杆的杆长之和应小于或等于其余两杆的长度之和;2)连架杆与机架必有最短杆1).杆件1为曲柄2).在各杆长度不变的情况下,选取c杆做为机架就可以实现双摇杆机构试以作图法设计一偏置尖底推杆盘形凸轮的轮廓曲线。
已知凸轮以等角速度顺时针回转,正偏距e=10,基园半径r0=30mm.推杆运动规律为:凸轮转角δ=0~150时,推杆00.凸轮转角δ=180~300时推杆等速上升16mm;.凸轮转角δ=150~180时推杆远休;等加速回程16mm;.凸轮转角δ=300~360时推杆近休。
解:解题步骤1)首先绘制位移S与转角δ的关系曲线S-δ曲线。
2)根据S-δ曲线、凸轮基园半径和正偏距,绘制凸轮的轮廓曲线。
000000凸轮仅用了0度,90度,150度,180度,300度几个点绘制轮廓曲线,同学们绘制时英多用些点(一般取12个点,再勾画轮廓曲线)第二篇:机械原理_凸轮机构设计机械原理课程设计——凸轮机构设计(一)目录 (1)_________________________(一)、题目及原始数据 (2)(二)、推杆运动规律及凸轮廓线方程 (3)(三)、(四)、(五)、(六)、(七)、(八)、计算程序方框图..........................5 计算源程序..............................6 程序计算结果及分析......................10 凸轮机构图..............................15 心得体会................................16 参考书. (16)(一)、题目及原始数据试用计算机辅助设计完成偏置直动滚子推杆盘形凸轮机构的设计,凸轮以1rad/s的角速度沿逆时针方向转动。
要求:(1)、推程运动规律为等加速等减速运动,回程运动规律为五次多项式运动规律;(2)、打印出原始数据;(3)、打印出理论轮廓和实际轮廓的坐标值;(4)、打印出推程和回程的最大压力角,以及出现最大压力角时凸轮的相应转角;(5)、打印出凸轮实际轮廓曲线的最小曲率半径,以及相应的凸轮转角;(6)、打印出凸轮运动的位移;(7)、打印最后所确定的凸轮的基圆半径。
重庆大学机械原理章节习题库-3凸轮机构
重庆大学机械原理章节习题库-3凸轮机构3凸轮机构3.1凸轮机构按凸轮形状分几种,3.2凸轮机构按从动件高副元素形状分几种,3.3等速运动规律、等加速等减速运动规律、余弦加速运动规律、正弦加速运动规律、3-4-5多项式运动规律各有什么特点,3.4什么是刚性冲击、柔性冲击,3.5移动从动件盘状凸轮机构基本尺寸有哪些,3.6移动从动件盘状凸轮机构的偏距方向如何选择,为什么,3.7移动从动件盘状凸轮机构基圆半径r的选取原则是什么, b3.8摆动从动件盘状凸轮机构基本尺寸有哪些,3.9摆动从动件盘状凸轮机构压力角与基本尺寸的关系是什么,3.10基园半径在哪个轮廓线上度量,3.11若, 过小,采取什么处理措施, min3.12平底宽度如何确定,3.13 图3-1所示为从动件在推程的部分运动线图,凸轮机构的Φ,0,Φ,,0,根据s ss、v和a之间的关系定性地补全该运动线图,并指出该凸轮机构工作时,在推程哪些位置会出现刚性冲击,哪些位置会出现柔性冲击,3.14图3-2所示为凸轮机构的起始位置,试用反转法直接在图上标出:1) 凸轮按,方向转过45:时从动件的位移;2) 凸轮按方向转过45:时凸轮机构的压力角。
,图3–1 图3–23.15 图3-3所示的对心移动滚子从动件盘形凸轮机构中,凸轮的实际廓线为一圆,圆心在A点,半径R,40mm,凸轮转动方向如图所示,l,25mm,滚子半径r,10mm,试问: OAr1) 凸轮的理论轮廓曲线为何种曲线,2) 凸轮的基圆半径r,, b3) 在图上标出图示位置从动件的位移s,并计算从动件的升距h,,4) 用反转法作出当凸轮沿,方向从图示位置转过90:时凸轮机构的压力角,并计算推程中的最大压力角,,, max5) 若凸轮实际轮廓曲线不变,而将滚子半径改为15mm,从动件的运动规律有无变化,图3–33.16用作图法设计一偏置直动滚子从动件盘形凸轮机构的凸轮廓线。
已知凸轮以等角速度顺时针回转,偏距e=10mm,从动件导路偏于凸轮转动中心的左侧,基圆半径r=30mm ,b 滚子半径r=10mm。
机械原理大作业——凸轮.docx
大作业(二)凸轮机构设计题号:6班级:姓名:学号:同组者:成绩:完成时间:目录一凸轮机构题目要求 (1)二摆杆的运动规律及凸轮轮廓线方程 (2)三计算程序 (3)四运算结果及凸轮机构图 (9)4.1 第一组(A组)机构图及计算结果 (9)4.2 第二组(B组)机构图及计算结果 (14)4.3 第三组(C组)机构图及计算结果 (19)五心得体会 (24)第一组(A组) (24)第二组(B组) (24)第三组(C组) (24)六参考资料 (25)附录程序框图 (26)一凸轮机构题目要求(摆动滚子推杆盘形凸轮机构)题目要求:试用计算机辅助设计完成下列偏置直动滚子推杆盘形凸轮机构或摆动滚子推杆盘形凸轮机构的设计,已知数据如下各表所示。
凸轮沿逆时针方向作匀速转动。
表一摆动滚子推杆盘形凸轮机构的已知参数题号初选的基圆半径R0/mm机架长度Loa/mm摆杆长度Lab/mm滚子半径Rr/mm推杆摆角φ许用压力角许用最小曲率半径[ρamin][α1] [α2]A 15 60 55 10 24°35°70°0.3RrB 20 70 65 14 26°40°70°0.3RrC 22 72 68 18 28°45°65°0.35Rr 要求:1)凸轮理论轮廓和实际轮廓的坐标值2)推程和回程的最大压力角,及凸轮对应的转角3)凸轮实际轮廓曲线的最小曲率4)半径及相应凸轮转角5)基圆半径6)绘制凸轮理论廓线和实际廓线7)计算点数:N:72~120推杆运动规律:1)推程运动规律:等加速等减速运动2)回程运动规律:余弦加速度运动二摆杆的运动规律及凸轮轮廓线方程1)推程:1,运动规律:等加速等减速运动;2,轮廓线方程:A:等加速推程段设定推程加速段边界条件为:在始点处δ=0,s=0,v=0。
在终点处。
整理得:(注意:δ的变化范围为0~δ0/2。
机械原理习题课-凸轮(完整资料).doc
此文档下载后即可编辑五、(12分)图示为一偏心圆盘凸轮机构,凸轮的回转方向如图所示。
要求:(1)说明该机构的详细名称;(2)在图上画出凸轮的基圆,并标明图示位置的凸轮机构压力角和从动件2的位移;(3)在图上标出从动件的行程h及该机构的最小压力角的位置。
五、总分12分。
(1)2 分;(2)6 分;(3)4 分(1) 偏置直动滚子从动件盘形凸轮机构。
(2) r0,α,s如图所示。
(3) h及αmin发生位置如图示。
五、(10分)试在图示凸轮机构中,(1)标出从动件与凸轮从接触点C到接触点D时,该凸轮转过的转角ϕ;(2)标出从动件与凸轮在D点接触的压力角α;(3)标出在D点接触时的从动件的位移s。
五、总分10分。
(1)4 分;(2)3 分;(3)3 分(1)ϕ如图示。
(2)α如图示。
(3) s如图示。
-5、图示为一偏置直动滚子从动件盘形凸轮机构。
试在图上:(1)画出并标明基圆r0;(2)作出并标明凸轮按ω方向转过60︒后,从动件与凸轮廓线接触处的压力角α;(3)作出并标明滚子从图示位置反转到B处与凸轮接触时,对应的凸轮转角ϕ。
1.在图示的凸轮机构中,画出凸轮从图示位置转过60 时从动件的位置及从动件的位移s。
1.总分5分。
(1)3 分;(2)2 分(1) 找出转过60 的位置。
(2) 标出位移s。
1.四、(10分)在图示凸轮机构中,已知:20AO mm,ο60=BO=∠AOB,=且A B(为圆弧;CO=DO=40mm,ο60∠COD,CD(为圆弧;滚子半径=r r=10mm,从动件的推程和回程运动规律均为等速运动规律。
(1)求凸轮的基圆半径;(2)画出从动件的位移线图。
四、总分10分。
(1)2分;(2)8分(1) r0=AO+r r=20+10=30 mm(2) s-ϕ线图如图示。
五、(10分)在图示直动平底从动件盘形凸轮机构中,请指出:(1 )图示位置时凸轮机构的压力角 。
(2 )图示位置从动件的位移。
机械原理典型例题(凸轮)-文档资料

个外径与原滚子不同的新滚子,则更换滚子后____D____。
A. 从动件运动规律发生变化,而从动件最大摆角不变
B. 从动件最大摆角发生变化,而从动件运动规律不变
C. 从动件最大摆角和从动件运动规律均不变
D. 从动件最大摆角和从动件运动规律均发生变化
(3)已知一滚子接触偏置直动从动件盘形凸轮机构,若将凸轮转向由顺
位移为S,速度为V, V=ω×Lop ,压力角为α。
适当偏距e(左移),使凸轮转过δ角,此时应有 相同位移S,相同速度V。此时压力角为α1;
可知:采用适当的偏距且使推杆偏向凸轮轴心 的左侧,可使推程压力角减小,从而改善凸轮 的受力情况,但使回程的压力角增大,由于回
P为瞬心位置,相同的速度即瞬心P位置是固定的。程的许用压力角很大,故对机构的受力情况影
αE
hE E
e
ω
Oθ
F
φ
r0
A
αmax
R
hF
S=hF-hE Sin α =(e-loAcos θ)/(R+rT)
θ =180时,α为 αmax
5
例5 :图示为一直动推杆盘形凸轮机构。若一直凸轮基
推程
圆半径r0,推杆的运动规律s=S(δ),为使设计出的凸轮
机构受力状态良好,试结合凸轮机构压力角的计算公式
机械原理典型例题(第五章) ——凸轮机构
2011.10
1
例1 图示偏心圆盘凸轮机构中,已知圆盘凸轮以ω=2rad/s转动,转 向为顺时针方向,圆盘半径R=50mm;当凸轮由图示位置转过90° 时,从动件的速度为ν=50mm/s。试求:(1)凸轮的偏心距e;(2) 凸轮转过90°时,凸轮机构的压力角αk ;(3)凸轮转过90°时,从 动件的位移hk;(4)从动件的行程h。
精选湖南大学机械原理ch09凸轮机构及其设计习题资料
College of Mechanical and Automobile Engineering
第九章 凸轮机构及其设计
习题答案
9-7 (a)
1. 求图示位置的压力角; 2. 凸轮从图示位置转过90°
后推杆的位移。
第9章凸轮机构及其设计
B
B
o
B1
A
从动件反转90°,滚子中 心B点的新位置
湖南大学机械与汽车工程学院 伍素珍
第9章凸轮机构及其设计
基圆
B
o B1
A
湖南大学机械与汽车工程学院 伍素珍
第9章凸轮机构及其设计
B
o B1
A
湖南大学机械与汽车工程学院 伍素珍
凸轮转90° , 从动件的位移
9-7 (b)
标出推杆从图示位置升高 位移s时,凸轮转角和凸轮机 构的压力角。
湖南大学机械与汽车工程学院 伍素珍
1. 推杆在凸轮上的接触点; 2. 摆杆位移角的大小; 3. 凸轮机构的压力角。
C
B
O
O
湖南大学机械与汽车工程学院 伍素珍
第9章凸轮机构及其设计
B
O
C
O
等价于
C
湖南大学机械与汽车工程学院 伍素珍
A B
O
O
第9章凸轮机构及其设计
做出凸轮的理论廓线
C
A
B O
O
湖南大学机械与汽车工程学院 伍素珍
C1
A
A1
B
O
C
O
湖南大学机械与汽车工程学院 伍素珍
将从动件还原为实际从动 件的形状,如图所示
机械原理与机械设计课后作业参考答案 - 第3章 凸轮机构
第三章凸轮机构及其设计3 - 1 判断题(正确的在其题号后括号内打√,否则打×)(1)为了避免从动件运动失真,平底从动件凸轮轮廓不能内凹。
( )(2)若凸轮机构的压力角过大,可用增大基圆半径来解决。
( )(3)从动件作等速运动的凸轮机构有柔性冲击。
( )(4)凸轮的基圆一般是指以理论轮廓上最小向径所作的圆。
( )(5)滚子从动件盘形凸轮的理论轮廓是滚子中心的轨迹。
( )解答:(1)√(2)√(3)×(4)√(5)√3 - 2 填空题(1)对于外凸凸轮,为了保证有正常的实际轮廓,其滚子半径应理论轮廓的最小曲率半径。
(2)滚子从动件盘形凸轮机构的基圆半径是从到的最短距离。
(3)在凸轮机构中,从动件按等加速等减速运动规律运动时,有冲击。
(4)绘制凸轮轮廓曲线时,常采用法,其原理是假设给整个凸轮机构加上一个与凸轮转动角速度ω的公共角速度,使凸轮相对固定。
(5)直动平底从动件盘形凸轮机构的压力角为,其基圆半径应按条件确定。
解答:(1)小于(2)凸轮回转中心到凸轮理论轮廓(3)柔性冲击(4)反转法相反的(5)0 按全部廓线外凸的条件设计基圆半径3 - 3 简答题(1)凸轮机构中,常用的从动件运动规律有哪几种?各用于什么场合?解答:1)等速运动规律刚性冲击(硬冲)低速轻载2)等加速、等减速运动规律柔性冲击中低速轻载3)简谐(余弦)运动规律柔性冲击中低速中载4)正弦加速度运动规律无冲击中高速轻载5)3-4-5多项式运动规律无冲击中高速中载(2)何谓凸轮机构的压力角?压力角的大小与凸轮基圆半径r0有何关系?压力角的大小对凸轮的传动有何影响?解答:在不计摩擦时,凸轮作用在从动件上推力作用线与从动件受力点的绝对速度方向所夹锐角称为压力角,称为凸轮机构的压力角。
基圆半径愈大,机构压力角愈小,但机构愈不紧凑;基圆半径愈小,机构压力角愈大,机构易自锁,效率低,但机构紧凑。
(3)滚子从动件盘形凸轮机构与尖底从动件盘形凸轮机构凸轮轮廓曲线是否相同?为什么?解答:不同。
【精品】机械原理和设计凸轮的练习题以及答案

21.若使 凸轮 轮廓曲线在任 何位 置都不变尖, 也不 变成叉 形,则滚子 半径必 须( 外凸 部分的最小曲 率半 径。 A. 大于 B. 小于 C. 等于 ) 。
) 理论轮廓
22.凸轮 轮廓 曲线没有凹槽 ,要 求机构传力很 大, 效率要 高,从动杆 应选( A. 尖顶式 B. 滚子式 C. 平底式
B . 基圆半 径越大 ,压 力角偏 小
B. 凸轮 机构 的工作 有利
) 的凸轮 机构,凸轮 的理论 轮廓曲 线与 实际轮 廓曲线 是不相等的。 B. 滚 子式从 动杆 ) 。 C 平底式从动杆
A 尖顶式从动杆
17. 压力角 是指 凸轮轮 廓曲线上某 点的( A. 切线 与从动 杆速度方向 之间的 夹角
机 原机 零教 研室
机 械设计基 础例题习 题新编及 解答
三、问答题 1.什 么样的机构 是凸轮 机构? 2.凸 轮机构的功 用是什 么? 3.什 么样的构件 叫做凸 轮? 4.凸 轮的种类有 哪些? 都适合什么 工作场 合? 5.凸 轮机构的从 动件有 几种?各适 合什么 工作条件? 6.凸 轮轮廊曲线 是根据 什么确定的? 7.从 动杆的运动 速度规 律有几种? 各有什 么特点? 8.凸 轮的压力角 对凸轮 机构的工作 有什么 影响? 9.什 么叫基圆? 基圆与 压力角有什 么关系 ? 10.从动 杆的 等速位移曲线 是什 么形状?等速 运动 规律有 什么缺点? 11 . 凸 轮 机 构 的 从 动 杆 为 什 么 能 得 预 定 的 要 求 ? 12.在什 么情 况下凸轮机构 从动 杆才能得到运 动的 停歇? 13.基圆 在凸 轮结构中有何 意义 ? 14.滚子 式从 动杆的滚子半 径的 大小,对凸轮 工作 有什么 影响? 15.某一 凸轮 机构的滚子损 坏后 ,是否可任取 一滚 子来替 代?为什么 ? 16.凸轮 压力 角太大有什么 不好 ? 17.凸轮 压力 角越小越好吗?为 什么?
第五章凸轮机械原理典型例题
推程
r0
O
ω
S,V, a 是确定的
B
B
S
B
α
S0 δ
S δ
S
S0
α1
O’ e O ω
O
α2
δ ω e O’
S0
O
ω
P
tan OP / OB (ds / d ) / (r0 s)
P
P
tan (OP e) / O ' B ((ds / d ) e) / ( r02 e 2 s)
A'
φ Cr B -ω O' A B' V
C' O
α
滚子中心C,半径r 理论轮廓,R=LO'C 基园R0, 推杆中心位置园, R=LOA 凸轮逆时90,推杆 中心A',推杆位置 接触点B' 摆动角φ 压力角α
2 2 tan 假设凸轮轮廓已经做出,要求在凸轮转过δ角时, (OP e) / O ' B ((ds / d ) e) / ( r0 e s) 位移为S,速度为V, V=ω×Lop ,压力角为α。 适当偏距e(左移),使凸轮转过δ角,此时应有 可知:采用适当的偏距且使推杆偏向凸轮轴心 的左侧,可使推程压力角减小,从而改善凸轮 相同位移S,相同速度V。此时压力角为α1; 的受力情况,但使回程的压力角增大,由于回 P为瞬心位置,相同的速度即瞬心P位置是固定的。程的许用压力角很大,故对机构的受力情况影 响不大。 右移,使凸轮转过δ角,此时压力角为α2;
基本概念题
1.选择题
(1)对于远、近休止角均不为零的凸轮机构,当从动件推程按简谐运动 C 规律运动时,在推程开始和结束位置______。 A.不存在冲击 B.存在刚性冲击 C.存在柔性冲击 (2)已知一滚子接触摆动从动件盘形凸轮机构,因滚子损坏,更换了一 个外径与原滚子不同的新滚子,则更换滚子后________。 D A. 从动件运动规律发生变化,而从动件最大摆角不变 B. 从动件最大摆角发生变化,而从动件运动规律不变 C. 从动件最大摆角和从动件运动规律均不变 D. 从动件最大摆角和从动件运动规律均发生变化 (3)已知一滚子接触偏置直动从动件盘形凸轮机构,若将凸轮转向由顺 时针改为逆时针,则_________。 D A. 从动件运动规律发生变化,而从动件最大行程不变 B. 从动件最大行程发生变化,而从动件运动规律不变 C. 从动件最大行程和从动件运动规律均不变 D. 从动件最大行程和从动件运动规律均发生变化
郑文纬《机械原理》配套题库【课后习题】(凸轮机构及其设计)【圣才出品】
第4章凸轮机构及其设计一、思考题思4-1 滚子从动件盘形凸轮机构凸轮的理论轮廓曲线与实际轮廓曲线之间存在什么关系?两者是否相似?答:(1)滚子从动件盘形凸轮理论轮廓曲线与实际轮廓曲线在法向方向上相差滚子的半径。
(2)两者相似,但并不时时相似。
思4-2 已知一滚子摆动从动件盘形凸轮机构,因滚子损坏,现更换了一个外径与原滚子不同的新滚子。
试问更换滚子后从动件运动规律和最大摆角是否发生变化?为什么?答:(1)更换滚子后从动件的运动规律发生变化,最大摆角不变。
(2)原因如下:更换滚子后凸轮的理论轮廓曲线发生变化,所以从动件的运动规律发生变化,而最大摆角由凸轮决定,所以最大摆角不变。
思4-3 何为凸轮机构的压力角?为什么要规定许用压力角?回程许用压力角为什么可大一些?凸轮机构的压力角与凸轮的压力角有何区别?答:(1)凸轮机构的压力角是指接触点的法线方向与从动件上作用点的速度方向之间所夹的锐角。
(2)当压力角增大到接近极限压力角时,即使尚未发生自锁,驱动力也会急剧增大,导致轮廓严重磨损、效率迅速降低,因此要规定许用压力角。
(3)从动件的回程不是由凸轮驱动的,不会发生自锁,因此回程压力角可取大一些。
(4)凸轮机构的压力角与从动件有关,随着从动件的变化,凸轮机构的压力角也会发生变化,而凸轮压力角是指凸轮本身的压力角,不会随着从动件的变化而变化。
思4-4 在图思4-1中尖底直动从动件圆盘凸轮机构中,凸轮作逆时针转动,试从减小推程压力角方面考虑从动件导路相对于凸轮回转中心的偏置方向是否合理。
又若将凸轮转向改为顺时针,从动件运动规律是否发生变化?为什么?思4-1答:(1)图中为正偏置,有利于减小推程压力角,偏置方向合理。
(2)若凸轮转向改为顺时针,从动件运动规律发生变化。
原因如下:改变凸轮的转向,其推程廓线段和回程廓线段互换,由于有偏置,这两个轮廓线段是不同的。
思4-5 平底从动件盘形凸轮机构凸轮轮廓曲线为何一定要外凸?而滚子从动件盘形凸轮机构凸轮理论轮廓曲线却允许内凹,且在内凹段一定不会出现运动失真?答:(1)平底从动件盘形凸轮机构凸轮轮廓曲线必须外凸,这样平底才能与轮廓上各点接触,以保证从动件完全实现预期的运动规律,如果平底从动件盘形凸轮轮廓曲线内凹会发生运动失真。
第6章凸轮--习题及答案(全)

o
代入数值得
2 ⎧ ϕ2 o ⎛ ϕ ⎞ = 0o ≤ ϕ ≤ 60o ⎪ ψ = 2 × 30 × ⎜ o ⎟ o ⎪ 120 240 ⎝ ⎠ ⎨ ⎪ψ = 300 - 1 × 120o − ϕ 2 60o ≤ ϕ ≤ 120o ( ) ⎪ 240o ⎩
(2)回程的位移方程式为
⎧ ⎡ ⎛ 2π ⎞ ⎤ T 1 sin ⎜ ' T ⎟ ⎥ Φ 0 + Φ s ≤ ϕ ≤ 360o ⎪ψ = ψ max ⋅ ⎢1 − ' + ⎨ ⎝ Φ0 ⎠⎦ ⎣ Φ 0 2π ⎪ T = ϕ − ( Φ0 + Φs ) ⎩
B’点坐标分别为:
− sin ϕ ⎤ ⎡ x ' ⎤ ⎢ ⎥ cos ϕ ⎥ ⎦ ⎣ y '⎦
⎡ x ' ⎤ ⎡ a − l cos(ψ 0 + ψ ) ⎤ ⎥ ⎢ y '⎥ = ⎢l sin(ψ + ψ ) ⎣ ⎦ 0 ⎣ ⎦ 对于推摆式,图 a) , ⎡ x ' ⎤ ⎡ a − l cos(ψ 0 + ψ ) ⎤ ⎢ y '⎥ = ⎢ −l sin(ψ + ψ ) ⎥ ⎣ ⎦ ⎣ 0 ⎦
B
e
A O
解:1)偏置直动滚子推杆盘形凸轮机构。 2)为使推程压力角较小,凸轮应该顺时针转动。
3)以 O 为圆心,以 OB 为半径画圆得理论廓线,连结 OA 并延长交理论廓线于 B0 点,再以 转动中心 A 为圆心,以 AB0 为半径画圆得基圆,其半径为 r0 。 4) B0 点即为推杆推程的起点,图示位置时推杆的位移和相应的凸轮转角分别为 s, ϕ ,B 点处的压力角 α = 0 。 5) AO 连线与凸轮理论廓线的另一交点 B1 , 过 B1 作偏距圆的切线交基圆于 C1 点, 因此 B1 C1 为行程 H。 6-9 在图示偏置滚子直动从动件盘形凸轮机构中,凸轮 1 的工作轮廓为圆,其圆心和半径分 别为 C 和 R, 凸轮 1 沿逆时针方向转动, 推动从动件往复移动。 已知: R=100mm, OC=20mm, 偏距 e=10mm,滚子半径 rr=10mm,试回答: 1)绘出凸轮的理论轮廓; 2)凸轮基圆半径 r0=?从动件行程 h=? 3)推程运动角 Φ 0 =?回程运动角 Φ 0 =?远休止角 Φ s =?近休止角 Φ s =? 4)从动件推程、回程位移方程式; 5)凸轮机构的最大压力角 α max =?最小压力角 α min =?又分别在工作轮廓上哪点出现? 6)行程速比系数 K=?
机械原理大作业凸轮机构题DOC

Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:连杆机构运动分析院系:机械设计制造及其自动化班级:设计者:学号:指导教师:设计时间:一.设计题目设计直动从动件盘形凸轮机构,凸轮机构原始参数 序号 升程(mm) 升程运动角(º) 升程运 动规律升程许用压力角(º) 回程运动角(º)回程运 动规律回程许用压力角(º)远休止角 (º)近休止角 (º) 22 120 90等加等减速 4080等减等加速 70 70120二. 凸轮推杆运动规律1.运动规律(等加速等减速运动) 推程 0450≤≤ϕ2229602ϕπϕ=⎪⎪⎭⎫ ⎝⎛Φ=h s ϕπωϕω2219204=Φ=h v2220219204πωω=Φ=h a 推程 009045≤≤ϕ()222020)2(9601202ϕππϕ--=-ΦΦ-=hh s())2(1920422ϕπωπϕω-=-ΦΦ=h v222219204ωπω-=Φ-=h a2.运动规律(等加速等减速运动) 回程 00200160≤≤ϕ ()[]2222)98(9601202πϕπϕ--=Φ+Φ-Φ-=S h h s ()[])98(1920-4-22πϕωπϕω-=Φ+Φ-Φ=S h v 222219204ωπω-=Φ-=h a回程 00240200≤≤ϕ ()[]222'002)34(9602ϕππϕ-=-Φ+Φ+ΦΦ=S h s ()[])34(1920-4-2'002ϕπωπϕω-=-Φ+Φ+ΦΦ=S h v222219204ωπω=Φ=h a三.推杆位移、速度、加速度线图及凸轮s d ds-φ线图采用VB 编程,其源程序及图像如下: 1.位移:Private Sub Command1_Click()Timer1.Enabled = True '开启计时器 End SubPrivate Sub Timer1_Timer() Static i As SingleDim s As Single, q As Single 'i 作为静态变量,控制流程;s 代表位移;q 代表角度 Picture1.CurrentX = 0 Picture1.CurrentY = 0 i = i + 0.1 If i <= 45 Then q = is = 240 * (q / 90) ^ 2Picture1.PSet Step(q, -s), vbRedElseIf i >= 45 And i <= 90 Thenq = is = 120 - 240 * ((90 - q) ^ 2) / (90 ^ 2)Picture1.PSet Step(q, -s), vbGreenElseIf i >= 90 And i <= 150 Thenq = is = 120Picture1.PSet Step(q, -s), vbBlackElseIf i >= 150 And i <= 190 Thenq = is = 120 - 240 * (q - 150) ^ 2 / 6400Picture1.PSet Step(q, -s), vbBlueElseIf i >= 190 And i <= 230 Thenq = is = 240 * (230 - q) ^ 2 / 6400Picture1.PSet Step(q, -s), vbRedElseIf i >= 230 And i <= 360 Thenq = is = 0Picture1.PSet Step(q, -s), vbBlackElseEnd IfEnd Sub2.速度Private Sub Command2_Click()Timer2.Enabled = True '开启计时器End SubPrivate Sub Timer2_Timer()Static i As SingleDim v As Single, q As Single, w As Single 'i为静态变量,控制流程;q代表角度;w代表角速度,此处被赋予50Picture1.CurrentX = 0Picture1.CurrentY = 0w = 50i = i + 0.1If i <= 45 Thenq = iv = 480 * w * q / 8100Picture1.PSet Step(q, -v), vbRedElseIf i >= 45 And i <= 90 Thenq = iv = 480 * w * (90 - q) / 8100Picture1.PSet Step(q, -v), vbBlack ElseIf i >= 90 And i <= 150 Thenq = iv = 0Picture1.PSet Step(q, -v), vbGreen ElseIf i >= 150 And i <= 190 Then q = iv = -480 * w * (q - 150) / 6400Picture1.PSet Step(q, -v), vbBlue ElseIf i >= 190 And i <= 230 Thenq = iv = -480 * w * (230 - q) / 6400Picture1.PSet Step(q, -v), vbRedElseIf i >= 230 And i <= 360 Then q = iv = 0Picture1.PSet Step(q, -v), vbBlack ElseEnd IfEnd Sub3.加速度Private Sub Command3_Click()Timer3.Enabled = True '开启计时器End SubPrivate Sub Timer3_Timer()Static i As SingleDim a As Single, w As Single, q As Single 'i为静态变量,控制流程;a代表加速度;q代表角度;w代表角速度w = 50Picture1.CurrentX = 0Picture1.CurrentY = 0i = i + 0.1If i <= 45 Thenq = ia = 480 * w ^ 2 / 8100Picture1.PSet Step(q, -a), vbRedElseIf i >= 45 And i <= 90 Thenq = ia = -480 * w ^ 2 / 8100Picture1.PSet Step(q, -a), vbBlackElseIf i >= 90 And i <= 150 Thenq = ia = 0Picture1.PSet Step(q, -a), vbGreenElseIf i >= 150 And i <= 190 Thenq = ia = -480 * w ^ 2 / 6400Picture1.PSet Step(q, -a), vbBlueElseIf i >= 190 And i <= 230 Thenq = ia = 480 * w ^ 2 / 6400Picture1.PSet Step(q, -a), vbRedElseIf i >= 230 And i <= 360 Thenq = ia = 0Picture1.PSet Step(q, -a), vbBlackElseEnd IfEnd Sub4.ds/dq---dsPrivate Sub Command4_Click()Timer4.Enabled = True '开启计时器;建立坐标系Picture1.Scale (-400, -400)-(400, 400)End SubPrivate Sub Timer4_Timer()Static i As SingleDim x As Single, s As Single, q As Single, scaley As Single, t As Single 'i为静态变量,控制流程;x代表位移;s代表纵坐标ds/dq;q代表角度Picture1.CurrentX = 0Picture1.CurrentY = 0scaley = 1t = 3.14 / 180i = i + 0.1If i <= 45 Thenq = i * tx = 194.734 * qs = 240 * (2 * q / 3.14) ^ 2Picture1.PSet Step(x, -s), vbRedElseIf i >= 45 And i <= 90 Thenq = i * tx = 194.734 * (3.14 / 2 - q)s = 120 - 97.367 * (3.14 / 2 - q) ^ 2Picture1.PSet Step(x, -s), vbRedElseIf i >= 90 And i <= 150 Thenq = i * tx = 0s = 120 * scaleyPicture1.PSet Step(x, -s), vbRedElseIf i >= 150 And i <= 190 Thenq = i * tx = -246.46 * (q - 5 * 3.14 / 6)s = 120 - 123.23 * (q - 5 * 3.14 / 6) ^ 2 Picture1.PSet Step(x, -s), vbRedElseIf i >= 190 And i <= 230 Thenq = i * tx = -246.46 * (23 * 3.14 / 18 - q)s = 123.23 * (23 * 3.14 / 18 - q) ^ 2Picture1.PSet Step(x, -s), vbRedElseIf i >= 230 And i <= 360 Thenq = i * tx = 0s = 0Picture1.PSet Step(x, -s), vbRedElseEnd IfEnd Sub四.确定凸轮基圆半径和偏距1. 求切点转角在图中,右侧曲线为升程阶段的类速度-位移图,作直线Dt dt与其相切,且位移轴正方向呈夹角[ 1]=300,则切点处的斜率与直线D t d t的斜率相等,因为kDtdt=tan600,右侧曲线斜率可以表示为:q;q=tan600继而求出切点坐标(337.272,292.084)。
机械原理-凸轮
第二节 凸轮机构的传力特性 G
传力特性分析目的 确定构件之间相互的作用力,为 解决磨损及强度尺寸设计提供可靠的 数据。
压力角—不计摩擦时,凸轮对
从动件作用力方向线nn与从动件上 力作用点的速度方向之间所夹的锐 角。
FR2 2
d
vl
F2R1
n
tb
B
t
1 F
n
传力特性分析
Fx 0 F sin( 1) (FR1 FR2 )cos2 0
(二) 组合运动规律
为了克服单一运动规律的某 些缺陷,获得更好的运动和动力 特性,可以把几种运动规律拼接 起来,构成组合运动规律(Law of combined motion)。
组合原则 位移曲线、速度曲线必须连 续,高速凸轮机构加速度曲线也 必须连续。
各段运动规律的位移、速度 和加速度曲线在连接点处其值应 分别相等。
构将产生刚性冲击(Rigid impulse)。等速运动规律适 加速度线图
a
,t
用于低速轻载场合。
,t
⑵ 等加速等减速运动规律 (Law of constant acceleration and deceleration)
推程
前半程
后半程
s
2h
2
2
s
h
2h
2
(
)2
v
4h 2
v
4h 2
(
)
4h 2 a 2
B
远停
h B
远停角s
回程
B0 S
rb
O
S S
360º
,t
回程角
近停
近停角s
S
D
D0
从动件的运动线图(Diagram of motion)
凸轮机构习题解

标出(a) 图图示位置时凸轮机构的压力角,凸轮从图示位 置转过900后推杆的位移;并标出(b)图推杆从图示位置升高位 移s时凸轮的转角和凸轮机构的压力角。
解:
a
s
s
d
a w
w
(a) 正偏置
(b) 正偏置
在图示的凸轮机构中,圆弧底摆动推杆与凸轮在B点接触。当 凸轮从图示位置逆时针转过900时,试用图解法标出:1)推杆 在凸轮上的接触点;2)摆杆位移角的大小;3)凸轮机构的压 力角。
解:1)接触点:
2)摆杆位移角:
3பைடு நூலகம்压力角:
r
y v
B
o’
B’
a
o
例已知图示偏心圆盘凸轮机构的各部分尺寸,试在图上用 作图法求: (1)凸轮机构在图示位置时的压力角 ; (2)凸轮的基圆;
(3)从动件从最下位置摆到图示位置时所摆过的角度y;
(4)凸轮相应转过的角度。
解:
(3)标出从动件的行程 h及该机构的最小压力角的位置。
解:
例试在图示凸轮机构中, (1)标出从动件与凸轮从接触点C到接触点D时,凸轮转过的转角; (2)标出从动件与凸轮在D点接触的压力角; (3)标出在D点接触时的从动件的位移 s。 解:
-
例 图示凸轮机构,要求:画出从升程开始到图示位置时 从动件的位移s,相对应的凸轮转角,B点的压力角。
解:
例 图示偏置直动滚子从动件盘形凸轮机构中,凸轮以角速度 逆时针方向转动。试在图上:
(1)画出理论轮廓曲线、基圆与偏距圆; (2)标出凸轮从图示位置转过90°时的压力角 和位移 s。
解:
例 偏心圆盘凸轮机构,凸轮的回转方向如图所示。 要求(1)说明该机构的详细名称;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
五、(12分)图示为一偏心圆盘凸轮机构,凸轮的回转方向如图所示。
要求:
(1)说明该机构的详细名称;
(2)在图上画出凸轮的基圆,并标明图示位置的凸轮机构压力角和从动件2的位移;
(3)在图上标出从动件的行程h及该机构的最小压力角的位置。
五、总分12分。
(1)2分;(2)6分;(3)4分(1)偏置直动滚子从动件盘形凸轮机构。
⑵r o, , S如图所示。
⑶h及:min发生位置如图示。
理论廓线
五、(10分)试在图示凸轮机构中,
(1)标出从动件与凸轮从接触点C到接触点D时,该凸轮转过的转角:;
(2)标出从动件与凸轮在D点接触的压力角:;
(3)标出在D点接触时的从动件的位移S O
五、总分10分。
(1)4分;(2)3分;(3)3分
(1):如图示。
(2)如图示。
(3)S如图示。
5、图示为一偏置直动滚子从动件盘形凸轮机构。
试在图上:
(1) 画出并标明基圆s
(2) 作出并标明凸轮按.方向转过60后,从动件与凸轮廓线接触处的压力角
(3 )作岀并标明滚子从图示位置反转到B处与凸轮接触时,对应的凸轮转角L
n
I-在图示的凸轮机构中,画出凸轮从图示位置转过60叩寸从动件的位置及从动件的移S O
1. 总分5分。
(1)3分;(2)2分
⑴找出转过60的位置。
⑵标出位移SO
1.
四、(10分)在图示凸轮机构中,已知:AO=BO= 20mm, . AOB = 60 ]且A B为圆弧;Co=Do= 40mm, MCOD =60 , CD为圆弧;滚子半径r r=10mm,从动件的推程和回
程运动规律均为等速运动规律。
(1)求凸轮的基圆半径;
(2)画出从动件的位移线图。
四、总分10分。
(1)2分;
(2)8分
⑴ r o=AO+r l∙=20+10=30 mm
TTlIrrt
五、(10分)在图示直动平底从动件盘形凸轮机构中,请指出:
(1 )图示位置时凸轮机构的压力角:O (2 )图示位置从动件的位移。
(3 )图示位置时凸轮的转角。
(4 )图示位置时从动件与凸轮的瞬心。
五、总分10
分。
⑴
0 (2) B1B3 (3)⑷ P o
五、(10分)图示凸轮机构,偏距e=10mm,基圆半径r0=2Omm,凸轮以等角速•’逆时针转动,从动件推程按等加速等减速运动规律运动,图中B点是在加速运动段终了时从动件滚子中心所处的位置,已知推程运动角G= 90 ,试画出凸轮推程时的理论廓线(除从动件在最低、最高和图示位置这三个点之外,可不必精确作图),并在图上标出从动件的行程h。
U] = O.Oolnl∕mm
五、(总分10分)(1)6分(2)4分
(1)等加速运动段终了时,从动件上升行程h的一半,凸轮则转过推程运动角的一半(即45 )。
用反转法求出B O 'B1点,过B D, B、B1三点即可作出凸轮
推程段的理论廓线。
(2)从动件的行程h见图中所示。
四、(10分)一对心直动尖顶从动件偏心圆凸轮机构,O为凸轮几何中心,O1
为凸轮转动中心,直线AC_BD,O1O=0.5OA,圆盘半径R=60 mm。
(1)根据图a及上述条件确定基圆半径心、行程h,C点压力角J C和D点接触时的位移h D、压力角〉D 。
(2)若偏心圆凸轮几何尺寸不变,仅将从动件由尖顶改为滚子,见图b,滚子半径r r=10mm。
试问上述参数r0、h、C和h D、:∙D有否改变?如认为没有改变
a) b)
需明确回答;如有改变也需明确回答。
a) b)
四、(10分)
(1) (5 分) 1) r ° = O 1A = 30mm ;
2) h = O 1C- O 1A = 60mm ; 3) : C=O 4) h∣D=J OιO +OD -OA = 37.08 mm ; 5) a D= arctg(—-—) = 26.57
v OD
(2) (5 分)1) r 0 =OI A r r =40 mm ; 2) h = 60mm (不变);3) : c = 0 (不变)
2
2
O 1O 4) h D = ∙. O 1O
(Rr r ) - r 0 = 36.16 mm ; 5) : D= arctg(一 ) = 23.20
H。