三轴加速度计ADXL330的特点及其应用
三轴加速度原理

三轴加速度原理三轴加速度原理是指在三维空间中测量和计算物体的加速度。
三轴加速度原理是基于牛顿第二定律和三轴加速度传感器的工作原理。
三轴加速度传感器能够同时测量物体在x、y和z轴上的加速度,并将这些加速度信息转换成电信号输出。
三轴加速度原理的基本思想是利用三轴加速度传感器测量物体在三个不同方向上的加速度,从而得到物体的加速度矢量。
根据牛顿第二定律,物体的加速度等于物体所受的合外力除以物体的质量。
因此,通过测量物体的加速度,可以得到物体所受的合外力的大小和方向。
三轴加速度传感器通常采用微机电系统(MEMS)技术制造,其基本原理是利用微小的质量块和弹簧系统来测量加速度。
当物体受到加速度时,质量块会受到惯性力的作用而发生位移,这个位移可以通过压电效应或电容效应转换成电信号输出。
三轴加速度传感器通常由三个独立的单轴加速度传感器组成,每个单轴传感器可以测量物体在相应轴上的加速度。
通过三轴加速度传感器的组合使用,可以同时测量物体在x、y和z轴上的加速度,从而得到物体的三维加速度。
三轴加速度传感器的典型应用包括医疗设备、车辆导航、智能手机和游戏控制器等。
在医疗设备中,三轴加速度传感器可以用于监测患者的运动和姿势,从而提供给医生有关患者健康状况的信息。
在车辆导航中,三轴加速度传感器可以用于测量车辆的加速度和转弯角度,从而提供给导航系统有关车辆行驶状态的信息。
在智能手机和游戏控制器中,三轴加速度传感器可以用于检测用户的手势和动作,从而实现触摸屏幕、倾斜控制和动作感知等功能。
三轴加速度原理的研究和应用对于物体运动的测量和分析具有重要的意义。
通过利用三轴加速度传感器可以实现对物体加速度的准确测量和分析,从而可以研究物体的运动规律、判断物体的姿势和动作,并应用于各种领域的工程和科学研究中。
此外,三轴加速度传感器还可以与其他传感器(如陀螺仪和磁力计)结合使用,以实现对物体在三维空间中的运动状态的全面测量和分析。
总之,三轴加速度原理是利用三轴加速度传感器测量和计算物体的加速度的基本原理。
三轴加速度计原理(二)

三轴加速度计原理(二)三轴加速度计原理什么是三轴加速度计?•三轴加速度计是一种传感器,用于测量物体在空间中的加速度。
•它可以检测物体的运动状态,包括静止、加速、减速和转弯等。
工作原理三轴加速度计基于微电机加速度计(MEMS加速度计)技术,通过测量物体的加速度来确定其动态状态。
MEMS加速度计•MEMS加速度计是一种微小的传感器,由微机械系统(Micro-Electro-Mechanical System,MEMS)构成。
•它主要由质量块和弹簧组成,当物体加速度发生变化时,质量块会受到力的作用而移动。
•通过测量质量块的位移,可以计算出物体的加速度值。
三轴加速度计三轴加速度计可以同时测量物体在三个方向(通常为X、Y、Z轴)上的加速度。
•它由三个独立的MEMS加速度计组成,每个加速度计分别测量不同方向上的加速度。
•通过组合三个方向的加速度值,可以完整地描述物体在空间中的加速度状态。
应用领域三轴加速度计在许多领域都有广泛的应用。
移动设备•三轴加速度计已经成为了智能手机和平板电脑等移动设备的标配。
•它可以用于自动屏幕旋转、姿态传感器、运动检测和手势识别等功能。
运动追踪•三轴加速度计可以用于运动追踪设备,如健身手环和智能手表。
•通过检测人体的运动和姿态,可以记录步数、消耗的卡路里和睡眠质量等信息。
汽车安全•三轴加速度计可以用于汽车安全系统,如碰撞检测和气囊触发。
•它可以感知车辆的加速度变化,并在发生碰撞时触发相关保护措施。
总结三轴加速度计通过测量物体在空间中的加速度来确定其动态状态。
它基于MEMS加速度计技术,通过组合三个方向的加速度值来描述物体的加速度状态。
三轴加速度计在移动设备、运动追踪和汽车安全等领域都有广泛的应用。
基于3轴加速度计ADXL345的全功能计步器设计

基于3轴加速度计ADXL345的全功能计步器设计摘要计步器是一种颇受欢迎的日常锻炼进度监控器,可以激励人们挑战自己,增强体质,帮助瘦身。
早期设计利用加重的机械开关检测步伐,并带有一个简单的计数器。
晃动这些装置时,可以听到有一个金属球来回滑动,或者一个摆锤左右摆动敲击挡块。
计步器功能可以根据计算人的运动情况来分析人体的健康状况。
而人的运动情况可以通过很多特性来进行分析。
比如人在运动时会产生加速度。
本文介绍了利用人运动时产生加速度变化来检测步数的计步器实现方案,利用具有体积小,功耗低,三轴高精度加速度传感器ADXL345,芯片内部即可把数据采集来的数据处理为数字数据,采集到加速度数据以后加以适当的算法就可以实现计步功能。
本文设计了一款基于加速度传感器ADXL345的计步器。
详细介绍了计步器的软件算法的实同时芯片中还集成了SPI和I²C接口,可以方便地将数据传输到主控芯片。
该系统设计简单,实现方便。
该芯片也可以扩展到其它需要测量加速度的应用场合,具有非常广阔的应用前景。
关键字:计步器加速度传感器ADXL345 低功耗Based on three accelerometer ADXL345 company-wide functionalpedometer designAbstractPedometer is a popular daily exercise, can inspire people progress monitors challenge yourself, enhanced physique, help thin body. Early design of mechanical switch detection using aggravated with a simple steps, and the counter. When shaking these devices, can hear a metal ball slide back and forth, or a pendulum swings around percussion block pieces.Pedometer function can according to the calculated a people's movement situation to analyze a healthy condition of body. But the person's movements can pass a lot of properties for analysis. Such as people in motion produces acceleration. This paper describes the use of people move to detect changes generated when the acceleration of steps, utilization of implementation scheme pedometer, small size, low power consumption, high ADXL345 three axis acceleration sensor, chip can put the data acquisition to internal data processing for the digital data acquisition to acceleration data, after appropriate algorithm can achieve plan step function. This paper introduces the design of a paragraph of the pedometer ADXL345 based on acceleration sensor. Introduces the software algorithm real pedometer while the SPI has integrated chip I²C interface, and I can be conveniently data transmission to the main control chip. The system is simple in design, realization convenient. The chip can also extend to other need to measure the applications, the acceleration is very broad application prospect.KEY WORDS pedometer acceleration sensor ADXL345 low power consumption目录中文摘要 (I)英文摘要 (II)1 绪论 (1)2 课题研究背景及意义 (2)2.1 光电计步器 (2)2.2基于射频技术的短跑训练计步器 (3)2.3 基于加速度传感器的计步器 (5)3 ADXL3XX系列产品简介及本次设计方案的提出 (5)3.1 ADXL335, ADXL345和ADXL346三轴加速度计的区别 (6)3.1.1 ADXL335的简介、特点及功能框图 (7)3.1.2 ADXL346的简介、特点及功能框图 (8)3.1.3 ADXL345的简介、特点及功能框图 (10)3.2 本次系统总体设计方案的提出 (13)3.2.1 ADXL345中断及寄存器功能分析 (13)3.2.2 系统总体设计方案 (15)4 系统硬件设计各模块电路 (16)4.1 传感器电路连接模块 (16)4.1.1 ADXL345的两种串行通信模式简介 (16)4.1.2 传感器模块连接 (18)4.2 微处理器模块 (19)4.3 EEPROM模块 (22)4.4 显示模块 (23)5 软件设计 (25)5.1 软件总体设计 (25)5.2 算法的实现 (26)6 结论 (32)致谢 (33)参考文献 (34)附录1 加速度计步器ADXL345简介 (36)附录2 整机电路图 (38)附录3 源程序 (38)1 绪论随着社会的发展,人们的物质生活水平日渐提高,人们也越来越关注自己的健康。
adxl335工作原理

adxl335工作原理ADXL335是Analog Devices公司生产的低功耗、三轴加速度计。
ADXL335的工作原理是基于谐振质量原理以及微力测量技术。
该传感器是静电式加速度计,其结构主要是由质量块、弹簧和静电电容器组成。
在ADXL335中,质量块通过三条弹簧与基板相连,当发生加速度时,质量块相对于基板发生振动,振动的惯性力会引起弹簧的拉伸或压缩,从而改变静电感应电容器的电容值。
传感器内部的电路通过对电容值的测量可得到加速度大小。
传感器的三个轴均采用相同的结构来进行测量,即每个轴都有一个质量块、弹簧和静电电容器。
对于静态测量,加速度值为0,当传感器受到外力作用,发生加速度时,加速度信号将会引起前置电路的电荷放电所引起的电压变化,电压变化即可通过运放输出到外部接口。
传感器内部的电路通过输出电压的变化计算得到加速度值。
传感器的静态误差小于0.5g,测量范围为±3g。
ADXL335内部的电路主要由前置放大器、弱直流反馈和可变增益放大器组成。
前置放大器的作用是放大微小的电容变化信号,将其转换为电压信号;弱直流反馈的作用是保持栅极电压不变,提高前置放大器的输入阻抗;可变增益放大器的作用是根据不同应用环境调整增益。
ADXL335具有低功耗、高灵敏度、高精度等特点,输出电压范围为0-3.3V。
传感器采用5V电源供电,工作温度范围为-40°C至+105°C。
传感器适用于工业控制、运动跟踪、姿态补偿、自平衡机器人等领域,广泛应用于手机、笔记本电脑、游戏控制、安防监控等产品中。
总之,ADXL335的工作原理是基于谐振质量原理和微力测量技术实现的。
当传感器受到外力作用,质量块振动引起弹簧的变形,从而改变静电电容器的电容值。
传感器内部的电路通过对电容值的测量可得到加速度大小。
传感器具有低功耗、高灵敏度、高精度等特点,适用于工业控制、运动跟踪、姿态补偿、自平衡机器人等领域。
基于加速度传感器ADXL330的高精度计步器(1)

新式的产品 ,通过测量人体行走时加速度的变化 ,来 达到计步的功能 。电子式计步器就可以克服机械式 的准确性和灵敏度低的缺点 。
1 人体行走模型
距离 、速度 、加速度等等有很多的参数来描述人 体行走的行为 ,本文主要采用加速度这个参数来模 拟人体行走 。如图 1 所示 ,我们可以分别定义三个 不同方向的加速度 :垂直 、前向和侧向 。
11111一2一0一一929990999以0以引引lo头更厌ll0100月l9910901101099尸0卜h100图8计步器硬件的结构框图传感器模块由三轴加速度传感器adxl330ad85545四通道运算放大器组成抗混叠滤波器71和内部集成多通道adc的单片机pic16lf8194101000100099一11011万方数据1008传感技术学报2006年z轴向上器更高的精度和准确度从表1可以看到此计步器的精度达到了98功耗经测量只有33mw非常适合应用于手持式设备
Acc_ X = Acc_ X_V + Acc_ X_ F = Acc_ X_ S
Acc_ Y = Acc_ Y_V + Acc_ Y_ F = Acc_ Y_ S
Acc_ Z = Acc_ Z_V + Acc_ Z_ F = Acc_ Z_ S 实际上 ,根据图 3 的分析 ,我们比较关心垂直方
图 4 低通滤波器的频率响应曲线
图 3 任意位置的加速度
2 计步器自适应算法
通常来讲 ,人体每秒钟行走 0. 5~2 步 ,最多不 超过 5 步 。因此 ,合理的计步器输出为 0. 5~5 Hz 。 在模拟电路部分 ,我们采用 5 Hz 的抗混叠带宽来过 滤高频噪声 ;在数字电路部分 ,采用 5 Hz 截止频率 的 FIR 低通滤波器来过滤高频噪声 。图 4 是低通 滤波器的频率响应 。
三轴加速度传感器

三轴加速度传感器1. 引言三轴加速度传感器是一种常见的传感器技术,用于测量物体的加速度和倾斜度。
它在许多领域中得到广泛应用,包括运动检测、姿态测量、智能手机和游戏控制器等设备。
本文将介绍三轴加速度传感器的工作原理、应用领域和未来发展趋势。
2. 工作原理三轴加速度传感器基于微机电系统(MEMS)技术。
它通常由微机械结构、压电材料和电路组成。
当物体受到加速度时,微机械结构会产生微小的位移,并将其转化为电压信号。
这个信号经过放大和滤波后被传感器读取和解析。
三轴加速度传感器通常包含X、Y、Z三个轴向,分别对应物体运动的水平、垂直和纵深方向。
通过测量三轴的加速度值,传感器可以确定物体的运动状态。
3. 应用领域3.1 运动检测三轴加速度传感器广泛应用于运动检测领域。
它可以测量用户的步数、距离、速度和活动强度,用于运动追踪和健身监测。
许多智能手环、智能手表和健身器材上都配备了三轴加速度传感器。
3.2 姿态测量三轴加速度传感器可以测量物体的倾斜度和方向,用于姿态测量和姿势跟踪。
它在虚拟现实、增强现实和航空航天等领域中得到广泛应用。
例如,游戏控制器可以通过传感器测量玩家的倾斜动作,并将其映射到游戏中的角色操作。
3.3 智能手机和平板电脑三轴加速度传感器是智能手机和平板电脑中的重要组成部分。
它可以实现自动屏幕旋转、姿势识别和步态分析等功能。
此外,多个传感器的组合使用,如加速度传感器和陀螺仪的联合使用,可以提供更精确的运动感知和定位能力。
4. 未来发展随着人工智能、物联网和移动技术的快速发展,三轴加速度传感器将在未来得到更广泛的应用。
以下是一些未来发展趋势:4.1 小尺寸化和低功耗随着智能设备更加轻薄和便携,对三轴加速度传感器的尺寸和功耗要求也越来越高。
未来的传感器将更加小巧,能够集成到更多类型的设备中,并且能够在较长时间内维持稳定的工作。
4.2 高精度和多参数测量未来的三轴加速度传感器将具备更高的精度和多参数测量能力。
三轴加速度计原理

三轴加速度计原理
三轴加速度计是一种用来测量物体在三个轴上的加速度的仪器。
它通过内部的
加速度传感器来检测物体在x、y和z轴上的加速度变化,并将这些数据转换成数
字信号输出。
这种仪器在许多领域都有广泛的应用,包括汽车工业、航空航天、运动医学等。
三轴加速度计的原理基于牛顿第二定律,即物体的加速度与作用在其上的力成
正比。
当物体在三个轴上受到外力作用时,加速度计会测量到相应的加速度变化。
通过对这些数据进行处理,可以得到物体在三个轴上的加速度值。
三轴加速度计内部通常包含微机电系统(MEMS)传感器,这些传感器可以测
量微小的加速度变化。
当物体在x轴上受到加速度时,x轴传感器会产生相应的电
信号;同样,y轴和z轴传感器也会分别产生相应的信号。
这些信号经过放大和滤
波处理后,就可以输出为数字信号,供用户进行分析和应用。
在实际应用中,三轴加速度计可以用来检测物体的运动状态、姿态变化、震动
情况等。
例如,在汽车工业中,它可以用来检测车辆的加速度、制动力和悬挂系统的状态;在航空航天领域,它可以用来检测飞机的姿态和飞行状态;在运动医学中,它可以用来监测运动员的运动状态和姿势。
总之,三轴加速度计作为一种重要的传感器,在许多领域都有着广泛的应用前景。
其原理简单而有效,可以帮助人们更好地理解和控制物体的运动状态,为各行各业的发展提供了重要的技术支持。
三轴加速度计ADXL330的特点及其应用

●新特器件应用1ADXL330简介ADXL330是美国模拟器件公司(ADI)新近推出的一款带有信号调理电路,可提供模拟电压输出的小量程、小尺寸、低功耗3轴加速度计。
ADXL330将iMEMS(微机电系统)传感器结构与信号调理结合在一起,功耗电流降低至200μA(在2.0V电源电压下),比同类器件的功耗典型值低50%。
考虑到手机和其他便携式消费类电子产品的设计要求,ADXL330采用4mm×4mm×1.45mm小型封装,集成了一个坚固的3轴传感器结构及其信号调理电路,该加速度计的测量动态范围是±3g。
单块的硅表面具有微机电传感器和信号处理电路可实现开环加速度测量,输出的模拟电压信号与加速度成正比,它不仅可以测量静态加速度(如某个斜坡上的加速度),还可以测量动态加速度(如物体在移动、震动时产生的加速度),具有10000g额定耐冲压强度,具有良好的0g偏压稳定性和良好的灵敏度。
利用3轴iMEMS加速度计可以实现多种功能,从而改进了用户与便携式电子产品间的互动界面,但昂贵的价格一直是制约iMEMS加速度计大规模应用的瓶颈。
ADI推出的ADXL330大批量报价低于2.00美元/片,已经接近1美元的临界价位,预计低于1美元的3轴MEMS加速度计将在未来两年内面世。
ADXL330可应用于蜂窝手机、GPS导航系统、车辆稳定控制、惯性测量单元、导航控制领域等。
2ADXL330结构功能ADXL330的引脚排列如图1所示。
从图中可以看出,1、4、9、11、13、16是预留引脚;2引脚是自我三轴加速度计ADXL330的特点及其应用孟维国(苏州大学电子信息学院,江苏苏州215021)摘要:ADXL330是美国模拟器件公司推出的完整的三轴加速度计,可以静态或者动态测量物体的加速度,测量范围是±2g。
介绍了ADXL330的主要特点及其在组合导航系统中的应用。
关键词:加速度计;ADXL330;GPS;SINS;组合导航系统中图分类号:TP23文献标识码:B文章编号:1006-6977(2007)02-0047-03CharacteristicsofthreeaxisaccelerometerADXL330anditsapplicationMENGWei-guo(CollegeofElectronicandInformation,SoochowUniversity,Suzhou215021,China)Abstract:TheADXL330isdesignedbyADI,anditisacomplete3-axisaccelerationmeasurementsystemonasinglemonolithicIC,itcanmeasurethestaticaccelerationaswellasdynamicacceleration,ithasthemeasurementrangeof±3g.ThemaincharacteristicsofADXL330anditsapplicationinintegratednavigationsystemaregiven.Keywords:accelerometer;ADXL330;GPS;SINS;integratednavigationsystem图1ADXL330引脚排列检测;5、6、7引脚是公共地;14、15引脚是电源;8、10、12引脚是加速度模拟信号输出。
意法半导体ISM330DHCX典型值特征说明书

LGA-14L(2.5 x 3.0 x 0.83 mm) 典型值特征•具有可选满量程的3D 加速度计:±2/±4/±8/±16 g•具有扩展的可选满量程的3D 陀螺仪:±125/±250/±500/±1000/±2000/±4000 dps •更宽的温度范围:-40°C 至 +105 °C•内嵌补偿机制,确保在不同温度条件下的高度稳定性•SPI/I²C 串行接口•辅助SPI 串行接口,用于陀螺仪和加速度计的数据输出(OIS 和其他稳定应用)•六通道同步输出•通过Sensor Hub 功能可有效地从其他外部传感器收集数据•高达9 KB 的嵌入式智能FIFO•可编程有限状态机,处理来自加速度计、陀螺仪和一个外部传感器的数据•机器学习内核•智能嵌入式功能和中断:倾斜检测、自由落体、唤醒、6D/4D 方向检测、单击和双击•嵌入式计步器、测步器和计数器,用于医疗保健应用•模拟供电电压:1.71 V 到3.6 V •嵌入式温度传感器•陀螺仪和加速度计的嵌入式自检•高抗震性•符合ECOPACK 、RoHS 和“绿色”要求应用•工业物联网和互联设备•天线、平台和光学图像和镜头防抖•机器人、无人机和工业自动化•导航系统和远程信息处理•振动监测和补偿说明ISM330DHCX 是一种系统级封装器件,它具有专为工业4.0应用而量身定制的高性能3D 数字加速度计和3D 数字陀螺仪。
意法半导体的MEMS 传感器模块系列具有稳健成熟的制造工艺,已经用于微型机械加速度计和陀螺仪产品。
多种传感元件采用专门的微型机械加工工艺制造,而IC 接口采用CMOS 技术开发,可以设计出专用电路,对该电路进行修调可以更好地匹配传感元件的特性。
在ISM330DHCX 中,加速度计和陀螺仪的传感元件在同一晶圆上实现,从而保证了出色稳定性和稳健性。
LIS33DE三轴加速度计的特点性能分析

LIS33DE三轴加速度计的特点性能分析
LIS33DE是一种超小型低功耗的三轴加速度计属于ST的运动传感器的“纳米”的家庭。
它包括一个传感元件和一个集成电路接口能够通过I2C和SPI串行接口到外部世界提供的加速度测量。
该传感元件是使用专用的过程开发的由圣生产的惯性传感器和执行器在硅中。
IC接口是使用CMOS工艺,可以设计一个专门的电路,修整,以更好地匹配传感元件特性制造。
LIS33DE动态用户可选的全尺度的±2g/±8G,它能够以100赫兹或400赫兹的输出数据速率测量加速度。
自检功能允许用户检查传感器的功能在最终的应用。
该装置可配置为产生惯性唤醒/自由落下的中断信号,当可编程的加速度阈值交叉至少在三轴之一。
中断发生器的阈值和时间是可编程的终端用户的飞行。
在塑料薄膜的LIS33DE 栅格阵列(LGA)封装是可用的和它的设计工作在扩展的温度范围从(-40°C)-(+85°C)。
主要特点:
1、2.16伏至3.6伏的电源电压
2、1.8 V兼容iOS
3、《1兆瓦的电力消耗
4、±2g/±8G动态选择的全面
5、I2C或SPI数字输出接口
6、可编程中断发生器
7、嵌入式自测试
8、万克高的抗冲击能力
9、®Ecopack RoHS和“绿色”标准
推荐阅读:http:///monijishu/wuxian_chuangan/301478l。
ADXL3xx:读取ADXL3xx加速度传感器

ADXL3xx:读取ADXL3xx加速度传感器原⽂链接:ADXL3xx加速度传感器本教程将为你展⽰如何读取Analog Devices的ADXL3xx系列加速度计(例如:ADXL320,ADXL321,ADXL322,ADXL330)传感器的值,并将加速度的值传送到电脑,通过串⼝窗⼝(ArduinoIDE)或使⽤另⼀个串⼝软件显⽰数据。
本教程基于传感器,的加速度计也能够⽤于此例程,不过,它们的接线不同。
ADXL3xx加速度传感器输出各轴上的加速度的模拟信号电压在0-5V之间。
为了读取这个数据,你需要⽤到analogRead()这个函数。
硬件要求Arduino 或者 Genuino 开发板ADXL3xx加速度传感器电路加速度传感器⼯作电流很⼩,所以它可以直接接到开发板上从数字输出引脚获得电压。
因此,需要使⽤三个模拟输⼊引脚作为数字I/O引脚,分别⽤于VCC、GND 以及⾃检引脚。
你将使⽤其他三个模拟输⼊引脚来读取加速度传感器的模拟输出。
图⽚使⽤开发。
有关更多电路⽰例,请参见项⽬页原理图点击图⽚放⼤如果你使⽤加速度传感器模块的话,接线引脚如下:模块引脚Self-Test Z轴输出Y轴输出x轴输出GND VCCArduino模拟输⼊引脚012345如果你仅仅使⽤加速度传感器⽽⾮模块的话,接线引脚如下:ADXL3xx引脚Self-Test Z轴输出Y轴输出x轴输出GND VCCArduino引脚None(悬空)A1A2A3GND5V请注意,某些加速度传感器使⽤3.3V供电,如果使⽤5V供电可能会导致损坏。
请查阅⼚商的⽂档来确定正确的使⽤电压。
代码加速度传感器的连接引脚在初始化中被定义为常量,使⽤A4和A5作为电源时可使它们⼯作在数字模式(D18,D19)。
同理,可以将A0定义为D14、A1定义为D15等。
const int groundpin = 18;const int powerpin = 19;设置引脚19(A5)为⾼电平,将引脚18(A4)为低电平来为加速度传感器提供5V电压⼏毫安⼤⼩的电流使它正常运作。
三坐标应用及参数

3.0+L/200
最大承重(kg)
500
800
800
1000
1000
仪器重量(kg)
650
1300
1300
1700
1900
仪器规格参数:
仪器型号
CNC654
CNC886
CNC1086
CNC12108
CNC15108
测量范围(mm)
X 500
X800
X800
X1000
X1000
Y 600
Y 800
Y1000
Y 1200
Y 1500
Z 400
Z600
Zmm)
X 1250
X1350
X 1350
X 1550
X 1500
Y 1500
Y 1750
Y 1950
Y 1950
Y2150
Z 2500
Z2900
Z 2900
Z 2900
Z 2900
分辨率(μm)
0.5
最大速度(mm/s)
300
空气压力
0.6~0.8Mpa(kg/cm²,NL/min)
示值误差
2.7+L/250
2.8+L/250
2.8+L/200
仪器用途:
三次元/三坐标测量机主要用于机械、汽车、航空、军工、模具等行业中的箱体、机架、齿轮、凸轮、涡轮、叶片、曲线、曲面等的测量。
仪器特点:
该系列三坐标测量机具有功能强大、性能稳定、精度高、操作简单、维护方便等特点,相对于其他产品系列比较而言,该系列具有结构简单、承载能力强、工件放置空间开阔、装卸便捷等特点。
基于加速度传感器ADXL330的运动信息采集平台设计

得到该点的运动轨迹及动态过程等信息。将多个 特征点所采集到的数据进行综合分析, 就可得出 被测人体运动的详细信息, 从而实现了运动信息 的数字化。本运动信息采集平台, 利用多节点网 络技术,同时采集多个特征点的加速度信息, 并 对信息进行处理或转发到高端计算机进行综合分 析处理, 从而使本采集平台可以广泛应用于身体
( 1. 天津工程师范学院 工程实训中心,天津 300222; 2. 天津大学 精密测试技术及仪器国家重点实验室,天津 300072)
摘
要 : 开发了一种能对加速度传感器 ADXL330 的运动信息进行采集的平台。该平台利用多节点网络
技术可同时采集多点加速度信息, 并能对信息进行处理或转发到高端计算机进行综合分析。利用此平台, 可及时、 准确地采集到人体运动的相关信息。在此平台基础上进行二次开发, 可应用于身体康复训练、 体 育锻练、 游戏控制等领域。 AVR;信息采集 关键词 : 加速度传感器;网络节点;ARM;
图5
ARM7 主控制器流程图
5
结束语
图4
ARM7 系统结构图
3.3
电源电路设计 系统采用 5 节 1. 2 V 镍氢电池组成电池组提 供电源, 并采用电源管理芯片 LP2951 进行电源 管理, 为系统提供稳定的 5 V 工作电压, 并具有 电量检测的功能。
本研究设计的基于三轴加速度传感器 ADXL330 的运动信息采集平台, 可以精确快速 地采集人体的运动信息, 为观测、 研究人体的运 动情况提供了一种新的方法。 在此平台基础上进 行二次开发, 可广泛应用于体育、 娱乐、 健身等 领域。 参考文献:
作者简介:郝立果(1978—) ,男,助理实验师,研究方向为测试测量技术及电气自动化,.
ADXL335应用
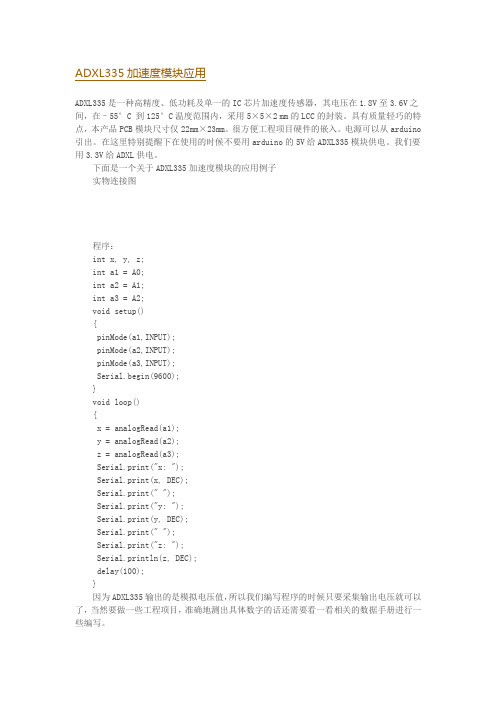
ADXL335加速度模块应用ADXL335是一种高精度、低功耗及单一的IC芯片加速度传感器,其电压在1.8V至3.6V之间,在–55°C 到125°C温度范围内,采用5×5×2 mm的LCC的封装。
具有质量轻巧的特点,本产品PCB模块尺寸仅22mm×23mm。
很方便工程项目硬件的嵌入。
电源可以从arduino 引出。
在这里特别提醒下在使用的时候不要用arduino的5V给ADXL335模块供电。
我们要用3.3V给ADXL供电。
下面是一个关于ADXL335加速度模块的应用例子实物连接图程序:int x, y, z;int a1 = A0;int a2 = A1;int a3 = A2;void setup(){pinMode(a1,INPUT);pinMode(a2,INPUT);pinMode(a3,INPUT);Serial.begin(9600);}void loop(){x = analogRead(a1);y = analogRead(a2);z = analogRead(a3);Serial.print("x: ");Serial.print(x, DEC);Serial.print(" ");Serial.print("y: ");Serial.print(y, DEC);Serial.print(" ");Serial.print("z: ");Serial.println(z, DEC);delay(100);}因为ADXL335输出的是模拟电压值,所以我们编写程序的时候只要采集输出电压就可以了,当然要做一些工程项目,准确地测出具体数字的话还需要看一看相关的数据手册进行一些编写。
下载完程序以后,我们打开串口调试窗口,可以看到窗口上显示我们测试到的数据。
三轴转台标定加速度传感器

基于三轴转台的ADXL335加速度传感器标定实验一、实验目的1、熟练使用SGT320E型三轴多功能转台,掌握传感器测量和采集的方法2、掌握卡尔曼滤波课程的传感器三参数标定原理二、实验器材1、实验室具备“ SGT320E型三轴多功能转台”实验设备2、实验室具备ADXL335加速度传感器3、安捷伦数据采集卡、笔记本电脑、MATLAB软件等。
三、实验原理1、三轴转台部分静态测试:此实验基础以“ SGT320E型三轴多功能转台”为平台,在三轴转台内框夹具上安装“ ADXL335加速度传感器”进行测试,由三轴转台内框0 °作为初始位置,内框旋转180。
,每隔2°采集一次数据。
将90个数据按照最小二乘法滤波,在Matlab中计算出标定传感器所需要的三个误差参数:Bias (零偏)、Scale Factor error (刻度系数误差)、g-sensitive drift (作用在转感器敏感轴上的加速度引起的g相关零偏)。
2、加速度传感器三个误差参数标定原理部分在理想状态下,加速度计敏感轴被放置于垂直地面方向,则读数应为g,当敏感轴与重力加速度方向存在一个夹角时,读数应为g COS^K。
但事实上,加速度计是存在误差。
如果为了简化变量,忽略加速度计本身噪声,那加速度计的输出可以包括重力部分(g COS^K)、零偏值(Bias )、刻度因素误差(SF g cos% )、敏感轴偏移误差(K (g COS^K)2),因此加速度传感器的输出表达式为:2Acc_Output = g COS T K+ Bias+SF g cos&K +K (g cosT K)那么误差表达式为:Error =Acc_Output—g cos% = Bias + SF g COS^K+ K (g ■COS I K)2因此,标定传感器就需要求出Bias、SF、K三个参数。
如果将Error当作测量模型y K,将g COS^K当作x K,则测量方程表达式为:* 2y K = Bias SF X K K (X K)因为测量方程是二阶的,用最小二乘法滤波方法中的二阶多项式代替:其中参数a 0、a 1、a 2分别对应误差测量方程中的 Bias 、SF 、K ,数值由最小二乘法的二阶多项式参数矩阵确定,矩阵表示形式为:通过计算这一矩阵,求得标定传感器所需的三个误差参数为利用最小二乘法滤波,计算标定参数的程序流程图:3、ADXL335加速度传感器部分ADXL335是一款小尺寸、薄型、低功耗、完整的三轴加速度计,提供经过信号调理的电 压输出,能以最小 土 3g 的满量程范围测量加速度。
ADXL330小型、低功耗、3轴、±3g iMEMS加速计
ADXL330小型、低功耗、3轴、±3g iMEMS加速计
佚名
【期刊名称】《电子制作》
【年(卷),期】2008(000)008
【摘要】ADXL330是一款集成在单芯片上的小尺寸、薄型、低功耗、完全3轴加速计,内置信号调理电压输出电路,加速度范围±3g。
它可以在倾斜检测中测量静态加速度,也可以测量运动、冲击或震动引起的运动加速度。
主要应用于:移动设备、戏系统、硬盘保护、图像稳定性、运动与健身器材等。
【总页数】1页(P5)
【正文语种】中文
【中图分类】TP212
【相关文献】
1.ADI推出新系列3轴iMEMS加速度计ADXL330 [J],
2.三轴加速度计ADXL330的特点及其应用 [J], 孟维国
3.低功耗MEMS 3轴加速计 [J],
4.低功耗和小封装的3轴iMEMS加速度计 [J],
5.低功耗、高动作精度三轴加速计 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
ADXL335BCPZ-RL7数据表PDF,功能介绍说明

ADXL335BCPZ-RL7数据表PDF,功能介绍说明
ADXL335是一款小尺寸、薄型、低功耗、完整的三轴加速度计,提供经过信号调理的电压输出,该产品的满量程加速度测量范围为±3 g(最小值),可以测量倾斜检测应用中的静态重力加速度,以及运动、冲击或振动导致的动态加速度。
特征
三轴检测
小尺寸、薄型封装
4 mm × 4 mm × 1.4
5 mm LFCSP
低功耗:350 μA(典型值)
单电源供电:1.8 V to 3.6 V
抗冲击能力:10,000 g
出色的温度稳定性
通过各轴的一个电容调整相应的带宽
符合RoHS/WEEE无铅要求
(亚德诺半导体)传感器解决方案包括 MEMS 加速度计、MEMS 陀螺仪、MEMS 惯性测量单元(IMUs)、光学传感器、各向异性磁阻(AMR)传感器、温度传感器、霍尔效应传感器。
高性能分立原件和即插即用的解决方案能够高效可靠地应对复杂的设计要求。
应用
低功耗、运动和倾斜感应应用
移动设备
游戏系统
磁盘驱动器保护
图像稳定
运动和健康设备
注:本文部分内容与图片来源于网络,版权归原作者所有。
如有侵权,请联系删除!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
●新特器件应用1ADXL330简介ADXL330是美国模拟器件公司(ADI)新近推出的一款带有信号调理电路,可提供模拟电压输出的小量程、小尺寸、低功耗3轴加速度计。
ADXL330将iMEMS(微机电系统)传感器结构与信号调理结合在一起,功耗电流降低至200μA(在2.0V电源电压下),比同类器件的功耗典型值低50%。
考虑到手机和其他便携式消费类电子产品的设计要求,ADXL330采用4mm×4mm×1.45mm小型封装,集成了一个坚固的3轴传感器结构及其信号调理电路,该加速度计的测量动态范围是±3g。
单块的硅表面具有微机电传感器和信号处理电路可实现开环加速度测量,输出的模拟电压信号与加速度成正比,它不仅可以测量静态加速度(如某个斜坡上的加速度),还可以测量动态加速度(如物体在移动、震动时产生的加速度),具有10000g额定耐冲压强度,具有良好的0g偏压稳定性和良好的灵敏度。
利用3轴iMEMS加速度计可以实现多种功能,从而改进了用户与便携式电子产品间的互动界面,但昂贵的价格一直是制约iMEMS加速度计大规模应用的瓶颈。
ADI推出的ADXL330大批量报价低于2.00美元/片,已经接近1美元的临界价位,预计低于1美元的3轴MEMS加速度计将在未来两年内面世。
ADXL330可应用于蜂窝手机、GPS导航系统、车辆稳定控制、惯性测量单元、导航控制领域等。
2ADXL330结构功能ADXL330的引脚排列如图1所示。
从图中可以看出,1、4、9、11、13、16是预留引脚;2引脚是自我三轴加速度计ADXL330的特点及其应用孟维国(苏州大学电子信息学院,江苏苏州215021)摘要:ADXL330是美国模拟器件公司推出的完整的三轴加速度计,可以静态或者动态测量物体的加速度,测量范围是±2g。
介绍了ADXL330的主要特点及其在组合导航系统中的应用。
关键词:加速度计;ADXL330;GPS;SINS;组合导航系统中图分类号:TP23文献标识码:B文章编号:1006-6977(2007)02-0047-03CharacteristicsofthreeaxisaccelerometerADXL330anditsapplicationMENGWei-guo(CollegeofElectronicandInformation,SoochowUniversity,Suzhou215021,China)Abstract:TheADXL330isdesignedbyADI,anditisacomplete3-axisaccelerationmeasurementsystemonasinglemonolithicIC,itcanmeasurethestaticaccelerationaswellasdynamicacceleration,ithasthemeasurementrangeof±3g.ThemaincharacteristicsofADXL330anditsapplicationinintegratednavigationsystemaregiven.Keywords:accelerometer;ADXL330;GPS;SINS;integratednavigationsystem图1ADXL330引脚排列检测;5、6、7引脚是公共地;14、15引脚是电源;8、10、12引脚是加速度模拟信号输出。
为了使ADXL330正常工作,还需要一些简单的外围元件,图2是ADXL330的内部功能模块图。
ADXL330基本工作过程为:首先利用微传感器感知三维的加速度,将得到的三维交流信号放大,然后分别将信号解调,在输出端分别将三路信号再次放大、滤波后输出和加速度成正比的模拟电压。
下面详细介绍其结构功能和使用特点。
ADXL330的微机械传感器集成在一片硅晶体表面,传感器与硅晶片之间的空隙可以减缓加速度产生的力,加速度使移动物体变形,独立固定极板以及粘附在移动物体上形成的电容差是衡量结构变形程度的标准,固定极板由180°相位变化的方波驱动。
由于物体变形,导致差分电容失去平衡,并通过微传感器输出与加速度成正比的电压幅度。
解调结果放大后,通过一个32kΩ电阻(图2中的RFILT)输出,用户可以通过设置电容Cx、Cy和Cz的大小控制带通滤波器通带范围,通带的选择要适合于具体的运用,对于X轴和Y轴,带宽可以从0.5Hz~1600Hz,而对于Z轴,带宽从0.5Hz到550Hz,滤波器的作用是提高分辨率和减少干扰。
ADXL330能够同时测得X、Y和Z方向上的加速度参量,并且在这三个方向上的数据是正交的,传感器的错位是3个轴间交叉干扰的主要来源,可以通过校准来减小这种干扰。
ADXL330采用了新的设计技术,保证了其高性能,同时避免了使用额外的温度补偿电路,这种设计可以最大限度地减少量化误差和测量结果的非线性,温度的滞后性也很低(-25℃~70℃时,温度的影响小于3mg)。
在电源去耦方面,绝大多数情况下,单个CDC为0.1μF时可以消除噪声干扰,该电容应放置在电源引脚附近,降低50Hz时钟频率段噪声对测量结果的干扰,如果还有额外的去耦要求,可以在电源上加一个100Ω(或者更小)的电阻或者铁氧化物,如果需要更大的通带范围,可在CDC上并联其他电容。
另外必须要保证ADXL330的接地脚也能抗干扰,因为接地引脚干扰和电源干扰具有相同的危害。
在具体设置X、Y、Z轴带宽时,ADXL330具有带宽限制措施,在某些引脚上需增加小容量电容实现低通滤波功能。
带宽主要是由RFILT以及Cx、Cy和Cz决定的,带宽公式如下:f-3dB=1/(2πRFILT)×C(X,Y,Z)(1)电阻RFILT的标称值为32kΩ,但实际值会有点偏差,带宽亦会相应变化,CX、CY和CZ的最小值不能小于0.0047μF,不同电容值对应于不同带宽。
加速度计的带宽最终决定了测量精度(即测量分辨率),通过使用滤波器可以降低噪声干扰,从而提高分辨率。
ADXL330输出带宽大于500Hz(典型值),用户应该在此频率附近设置滤波器以减少测量误差,滤波器的带宽必须小于或等于输出引脚上A/D采样频率的一半,否则会引起干扰。
当然,模拟带宽还可以进一步的减少,从而提高分辨率,降低干扰。
ADXL330的噪声具有高斯白噪声特性,噪声分布在所有的频段上面,噪声的单位是μg/√Hz(噪声大小与加速度计的带宽均方根成正比),所以用户应该尽量减少带宽来提高分辨率,加大其测量的动态范围。
对于单片的加速度计,其噪声定义如下:均方根噪声=噪声密度×√BW×1.6)其中,BW是带宽。
通常,需得到噪声的峰值,另外噪声的峰-峰值只能通过静态测量。
ADXL330具有自我检测功能,由ST引脚来实现,当ST引脚电压等于电源电压时,可以检测加速度计是否正常工作,测试时,输出引脚有电压。
X轴输出电压典型值为-150mV,相当于加速度为-500mg;Y轴为150mV,相当于加速度为500mg;Z轴为-60mV,相当于加速度为-200mg。
如果输出引脚有这些电压值输出,就表示该加速度计正常工作。
在不作为测试引脚使用时,ST引脚可以不接或者接地,ST引脚上的电压应小于3V,如果系统有多电源输入,用稳压二极管来保证ST引脚电压小于3V。
ADXL330的各种参数是在电源电压为3V时进行测定和标称的,但电源电压范围为2V~3.6V,图2ADXL330的内部功能模块图当电源电压变化时,所得到的参数也会发生改变,因为其输出敏感度随着电源电压的不同而不同。
当电源为3.6V时,输出灵敏度为360mV/g,即输出每增加360mV,测得的加速度增加1g,在电压为2.0V时,灵敏度为195mV/g,即输出每增加195mV,测得的加速度增加1g。
同时0g(即加速度为0时的输出电压)也与电源电压有关,约为VS/2(VS为电源电压),也就是说,如果电源电压为3V,那么无加速度时输出为1.5V,当有加速度时,根据输出电压和灵敏度判断加速度的大小和方向。
例如:若灵敏度为360mV/g,输出电压为1.860V,则测得的加速度为1g。
噪声的输出与电源电压值无关,当电源电压增大时噪声密度降低,这是因为噪声电压一定的情况下,刻度因子mV/g增大。
当电源电压为3.6V时,X、Y轴的噪声密度为230μg/√Hz;电源电压为2V时,其噪声密度为350μg/√Hz。
一般情况加速度计的自测响应约与电源电压成正比,但是考虑到电源电压对灵敏度的影响,自测响应约与电源电压的三次方成正比。
例如,当电源电压为3.6V时,自测响应为:X轴是-275mV,Y轴是275mV,Z轴是-100mV;当电源电压为2.0V时,自测响应为:X轴是-60mV,Y轴是60mV,Z轴为-25mV。
另外电源电压下降会导致电流下降,当电源电压为3.6V时,电流消耗约为375μA;当电源电压为2.0V时电流消耗约为200μA。
3在组合导航系统中的应用ADXL330主要应用于组合导航系统中。
组合导航系统是由2个或者更多的导航系统联合导航,一般的组合导航系统是由捷联式惯性导航系统和GPS导航系统组成。
GPS(GlobalPositioningSystem)采用多星、高轨、测距体制,以距离作为基本观测量,由空间部分、地面监测部分和用户接收部分组成,用户接收机只要能同时观测到4颗或4颗以上的卫星,就可以完全解算出载体的三轴坐标、三维速度分量和时间等信息。
其主要优点是体积小、重量轻、定位和测速精度高、误差不随时间积累(长时效应好)、基本不受地域的限制,但是也存在明显的缺点,比如:载体做大机动飞行及信号被地形淹没时,GPS信号有可能中断或者有比较大的错误、信号更新率低,不能满足实时要求、低成本的GPS不能输出物体的姿态。
捷联式惯性导航系统(strap_downinertialnavigationsystem,SINS)利用惯性测量元件(加速度计,陀螺仪)测量物体相对空间的运动参数,并经过计算后实施导航任务,具体地说,是用加速度计计算物体的加速度,通过积分得到速度,再通过积分得到位移。
陀螺仪计测量物体角速度,通过计算得到物体的姿态。
其主要优点:自主性好,可以不依赖外界信息独立工作,不受环境和自身运动的干扰,短期精度和稳定性高。
但也有明显的缺点:性价比高、体积大、笨重,另外由于要进行积分,所以误差是发散的,累计误差太大,不能长时间工作。
综上所述,GPS与SINS各有长短,所以任何一种形式的导航都不能满足现代导航的需求,为了实现高精度、高可靠性、全天候导航,最有效的方法是把这两种设备组合成一个有效的整体,从而形成组合导航系统。