现代控制工程及测试技术(卓迅佳)
检测技术与控制工程教学大纲

检测技术与控制工程教学大纲《测试技术与控制工程》教学大纲课程代码:课程名称:学习时间:课程类型:0110098测试技术与控制工程32选修英文名称:课程成绩:课程性质:预存课程:课程系:检测技术与控制工程2专业课程电气与电子技术、C语言程序设计、机电工程学院应用专业:机械设计与制造及自动化课程术语:1、第六学期课程的地位、目标和任务本课程的状态:测试技术和控制工程是高等院校机电工程、机械设计制造和自动化专业的专业课程。
本课程在教学内容上应着重介绍机电系统中传感器、检测技术和计算机控制技术的基础知识、基本理论和基本方法。
在实践能力培养方面,应注重设计理念、创新意识和设计技能的培养。
本课程的目标是:1.学生获得传感器、自动检测方法、计算机控制系统的组成和特点等方面的基本知识和技能。
2.将所学的自动检测技术和计算机控制系统灵活地应用于未来的工作和生产实践。
本课程的任务:1.掌握各种传感器的原理和应用;2.具备自动检测技术的基本知识和技能;3.掌握计算机控制系统的组成和特点;4.掌握计算机控制系统的应用程序设计和实现技术;5.初步形成解决生产中实际问题的能力。
第二,本课程与其他课程的联系以前的课程:电气和电子技术,C语言编程。
后课程:创新机械设计等。
三、教学内容和要求第一章导言教学要求:掌握机电一体化的基本概念和关键技术,了解机电一体化的典型产品和发展趋势。
要点:机电一体化的基本概念和关键技术难点:机电一体化关键技术的教学内容;第一节机电一体化的基本概念(1)机电一体化的定义(2)机电一体化系统的要素(3)机电系统的分类(4)机电系统的特征第二节机电一体化技术与产品(1)机电一体化理论与技术基础(2)机电一体化关键技术(3)典型机电一体化产品第三节机电一体化的历史和趋势(1)机电一体化的历史(2)机电一体化的趋势第二章传感器和检测技术教学要求:理解传感和检测技术的基本概念;掌握应变和应力、压力、位移、流量、温度等典型物理量的检测技术及相应传感器的测量原理。
北方工业大学硕士研究生招生参考书目—高硕新祥旭考研辅导
085209集成电路工程(专业学位)
01集成电路与片上系统设计
02集成电路工艺与制造
03半导体传感器与微纳M器件
04嵌入式系统设计和应用
05集成电路测试与封装
《电路分析基础》(第4版)、上下册、李瀚荪、高等教育出版社、2006年5月。
《数字电子技术》(数字电子技术基础(第五版),阎石,高等教育出版社,2006
北方工业大学
学院、学科(领域)代码及名称
初试自命题科目参考书目
复试科目参考书目
加试科目参考书目
001信息工程学院
080900电子科学与技术
00不区册、郑君里、高等教育出版社、2000年5月。
《电路分析基础》(第4版)、上下册、李瀚荪、高等教育出版社、2006年5月。
083500软件工程
00不区分研究方向
《数据结构(C语言版)》、严蔚敏、清华大学出版社、2007年
《数据库系统概论》(第4版)、王珊、高等教育出版社、2007年。
《面向对象分析设计与编程》、吴炜煜、清华大学出版、2007。
《C程序设计》(第三版)、谭浩强、清华大学出版社、2005。
《计算机组成原理》(第三版)、蒋本珊、北京理工大学出版社、2008年。
《模拟电子技术》、童诗白、高等教育出版社。
081200计算机科学与技术
00不区分研究方向
《数据库系统概论》(第4版)、王珊、高等教育出版社、2007年。
《面向对象分析设计与编程》、吴炜煜、清华大学出版、2007。
《C程序设计》(第三版)、谭浩强、清华大学出版社、2005。
《计算机组成原理》(第三版)、蒋本珊、北京理工大学出版社、2008年。
模聚天门智联天下模塑生态联盟产业园产业招商推介会举行9个模塑项目现场签约

深圳市槿具技术学会SHENZHEN OIE&MOLO TECHNOLOGY SOCIETY■ Industry news开创模具燕曲代专用金属3D 打印机BLT-A300新品发 布活动。
钳力特副总经理贾鑫向大家 介绍BLT-A300的新品特色和给行业 带来的价值。
他指出,BLT-A300是 专门针对模具制造行业研发设计的3D 打印设备,可以为注塑模具制造带来更先进技术理念,解决一些机加工 没法完成的工作。
另外,毅速激光副总经理陆伟 平、台湾松井国际股份有限公司总经理徐慰恺、新科益系统与咨询(上海)有限公司MoldFlow 技术经理王 成,分别就“毅速激光技术的应用案例”、“模温控制和微发泡结合3D 打 印在注塑模具中的应用”、“仿真分 析助力增材制造降低注塑产品开发成 本”进行了主题演讲,向与会者分享和交流了增材制造技术在模具中的应用情况。
目前,随着我国制造业的转型升级,3D 打印技术在我国制造应用越来 越广泛。
模具作为制造业中的重要装 备,推广应用增材制造技术将极大提高模具的制造水平。
传统的模具制造 技术将更多的应用增材制造技术,将是大势所趋。
而毅速激光与钳力特的战略合作,必将进一步推进我国模具增材技术创新,开启了模具制造新时 代,并为模具行业的技术进步继续贡 献企业的才智和力量。
i 产业园产业蕊髒麟忑2018年12月9日,模塑生态联盟(湖北•天门)产业园2018产业招商 推介暨项目签约仪式在湖北天门举 行。
中国工程院院士李德群及来自中国模塑生态联盟、全国各地知名模塑 企业、全国模塑和汽配行业的180多位 企业家、专家聚首天门,共谋发展. 市委书记吴锦致辞,市委副书记、市 长庄光明主持会议。
吴锦代表市委、市政府向光临此 次活动的嘉宾表示诚挚欢迎。
他说, 此次全国各地知名模塑企业代表齐聚 天门.共襄模塑盛会、共商发展大 计,既是我市实施精准招商、培育新兴产业的重要举措,也是加快产业转 型升级、推动高质量发展的重大机 遇。
2024级测控技术与仪器专业指导性培养计划

2024级测控技术与仪器专业指导性培育支配学科门类:工学代码:08类别:仪器仪表类代码:0804专业名称:测控技术与仪器代码:080401学制:四年学位:工学学士一、培育目标本专业培育的是能适应社会主义现代化建设须要的,德智体全面发展的,具备精密仪器设计制造以及测量与限制方面基础学问与应用实力,能在国民经济各部门从事测量与限制领域内有关技术、仪器与系统的设计制造、科技开发、应用探讨、运行管理等方面的应用型高级特地人才。
二、培育要求德育方面:酷爱社会主义祖国,拥护中国共产党的领导,努力学习马列主义、毛泽东思想、邓小平理论和“三个代表”重要思想,逐步树立辨证唯物主义和历史唯物主义的世界观,具有艰苦创业的精神和为祖国现代化建设服务的思想,逐步树立一心一意为人民服务的人生观和正确的价值观;酷爱科学,养成理论联系实际的良好学风,具有开拓进取、求实创新和擅长合作的科学精神;具有良好的思想品德修养、文化素养和心理素养;自觉维护社会公德和遵纪遵守法律;了解基本国情,具有与现代社会相适应的法律意识、环保意识、国防意识和竞争意识。
业务培育要求方面:本专业学生主要学习精密仪器的光学、机械与电子学基础理论,测量与限制理论和有关测控仪器的设计方法,受到现代测控技术和仪器应用的训练,具有本专业测控技术及仪器系统的应用及设计开发实力。
毕业生应获得以下几方面的学问和实力:1.具有较扎实的自然科学基础,较好的人文、艺术和社会科学基础及正确运用本国语言、文字的表达实力;2.较系统地驾驭本专业领域宽广的技术理论基础学问,主要包括机械学、电子学、光学、测量与限制、市场经济及企业管理等基础学问;3.驾驭光、机、电、计算机相结合的当代测控技术和试验探讨实力,具有本专业测控技术、仪器与系统的设计、开发实力;4.具有较强的外语应用实力;5.具有较强的自学实力、创新意识和较高的综合素养。
三、主干学科光学工程、仪器科学与技术四、主要课程及简介课程编号课程名称学时/学分教材名称10712024 精密机械与仪器设计32/2 精密机械设计简介:该门课程属于专业基础模块,主要阐述了精密机械中常用机构和零、部件的工作原理、适用范围、设计计算方法、工程材料的选择、结构设计原则、精度分析的基础学问和误差计算的方法等。
现代测控技术与系统课程简介
现代测控技术与系统课程代码:80096003课程名称:现代测控技术与系统学分: 3开课学期:第3学年第2学期授课对象:测控技术与仪器专业先修课程:模拟电子技术,数字电子技术,微机原理及应用,单片机原理及应用,传感器原理及应用课程主任:董晓剑课程简介:测控技术近年来发展迅速,是一门集光、机、电、算于一体的工程性和综合性技术。
随着科学技术尤其是电子信息技术的飞速发展,测控的内涵已发展为具有信息获取、存储、传输、处理和控制等综合功能的测控系统;微型化、集成化、远程化、网络化、虚拟化成为以计算机为核心的现代测控技术的一个发展趋势。
本课程从应用角度出发,系统地讲述了现代测控技术的特点、发展概况及其应用。
本课程内容包括新型传感器技术、现代测控总线技术、虚拟仪器技术、远程测控技术、电子设备测控系统集成技术、自动测试设备及软件设计等。
实践教学环节:1.现代测控总线技术实验2.机器视觉技术实验3.虚拟仪器实验4.大型系统PLC综合实验5.现代传感器实验6.通信测控仪器实验课程考核:课程最终成绩=平时成绩*30%+期末考试成绩*70%;平时成绩由出勤率、作业的完成情况决定;期末考试采取灵活方式,采用开卷,题目难度要大,采取闭卷,题目难度适中。
指定教材:韩九强主编.现代测控技术与系统.北京:清华大学出版社2007.9参考书目:孙传友主编.测控系统原理与设计.北京:北京航空航天大学出版社,2002王福瑞等.单片微机测控系统设计大全.北京:北京航空航天大学出版社,1999.3 浦昭邦,王宝光主编.测控仪器设计.北京:机械工业出版社2001程德福,林君主编.智能仪器.北京:机械工业出版社2005.2。
测试技术与控制工程就业方向

测试技术与控制工程就业方向引言随着技术的不断进步和应用领域的扩展,测试技术与控制工程的就业前景变得越来越广阔。
测试技术与控制工程是一门综合性学科,它涉及到多个领域的知识和技能,包括测试方法、仪器设备、软件开发、数据分析等等。
本文将对测试技术与控制工程的就业方向进行详细介绍,并提供一些建议和经验。
测试技术与控制工程的就业方向1. 自动化测试工程师自动化测试工程师是测试技术与控制工程领域的一个重要职业方向。
自动化测试工程师主要负责开发和维护自动化测试框架,并使用相应的工具和脚本进行测试。
他们需要熟悉各种测试方法和工具,并能够设计和执行测试计划。
自动化测试工程师的就业前景非常广阔,几乎所有软件和硬件开发公司都需要他们的专业技能。
2. 测试开发工程师测试开发工程师是测试技术与控制工程领域另一个重要的职业方向。
他们主要负责设计和开发测试工具和框架,以提高测试的效率和质量。
测试开发工程师需要具备扎实的编程和软件开发能力,熟悉各种测试方法和工具,并能够与其他开发人员密切合作。
测试开发工程师的就业机会很多,包括软件开发公司、互联网企业、电子设备制造企业等。
3. 质量分析师质量分析师是测试技术与控制工程领域的另一个重要职业方向。
他们主要负责分析产品和系统的质量,并提出改进意见和方案。
质量分析师需要具备良好的数据分析和问题解决能力,能够熟练使用各种质量管理工具和方法。
质量分析师的就业机会非常广泛,包括制造业、服务业、金融业等各个行业。
4. 控制工程师控制工程师是测试技术与控制工程领域中涉及控制系统设计和开发的专业人员。
他们主要负责设计和实施各种控制算法和方案,并对系统进行优化和改进。
控制工程师需要具备扎实的数学和控制原理知识,熟悉各种控制工具和软件,并能够与其他相关领域的专业人员密切合作。
控制工程师的就业方向多样,包括机械制造、自动化、航空航天等行业。
发展趋势和建议随着技术的发展和应用领域的拓展,测试技术与控制工程的就业前景将会越来越广阔。
测控技术与仪器相关书籍
测控技术与仪器相关书籍测控技术与仪器是现代科学技术领域中不可或缺的重要组成部分。
它涉及到各个领域的实验、测试、检测和测量等方面,为科学研究和工程应用提供了有力的支撑。
为了更好地理解和应用测控技术与仪器,我们可以借助相关的书籍进行学习和研究。
下面就为大家推荐几本与测控技术与仪器相关的书籍。
1.《测控技术导论》这本书是测控技术领域的基础教材之一,它系统地介绍了测控技术的基本概念、原理和方法。
书中内容涵盖了传感器技术、信号处理、数据采集与处理、仪器控制等方面的知识,能够帮助读者全面了解和掌握测控技术的基本理论和应用方法。
2.《仪器与测量技术基础》这本书主要介绍了仪器与测量技术的基础知识和常用技术手段。
从仪器的基本原理、结构和工作原理入手,详细介绍了各种常用测量仪器的原理和应用。
同时,还介绍了测量误差分析、仪器校准和质量控制等内容,为读者提供了系统的仪器与测量技术知识。
3.《虚拟仪器技术与LabVIEW》虚拟仪器技术是现代测控技术的重要发展方向之一,LabVIEW作为虚拟仪器的常用开发平台,在工程实践中得到了广泛应用。
这本书详细介绍了LabVIEW的基本原理和应用技巧,包括界面设计、信号采集与处理、数据分析和仪器控制等方面的内容。
通过学习这本书,读者可以了解虚拟仪器技术的基本概念和LabVIEW的使用方法,从而提高测控技术的应用水平。
4.《自动化仪表与测量技术》自动化仪表与测量技术是现代工业自动化领域的重要内容,它涉及到各种自动化仪表的原理、结构和应用。
这本书全面介绍了自动化仪表的基本原理和常用技术,包括传感器技术、信号处理、自动控制和数据采集等方面的内容。
通过学习这本书,读者可以了解自动化仪表的工作原理和调试方法,提高自动化测控系统的设计和应用能力。
5.《光电测量技术与仪器》光电测量技术是一种重要的非接触测量方法,广泛应用于光学、电子、材料科学等领域。
这本书详细介绍了光电测量技术的基本原理和常用仪器的原理和应用。
现代测控工程技术专业就业方向
现代测控工程技术专业就业方向现代测控工程技术是一门应用科学,涵盖了测量、控制、自动化等多个领域。
随着科技的不断发展,现代测控工程技术在各个行业中得到了广泛应用,对于提高生产效率和产品质量起到了重要作用。
因此,现代测控工程技术专业的就业前景非常广阔。
一、制造业现代测控工程技术在制造业中扮演着重要的角色。
在制造过程中,测量技术被广泛应用于产品的尺寸、形状、表面质量等方面的检测,以确保产品的质量。
同时,控制技术能够对生产过程进行实时监控和调整,提高生产效率和产品质量。
因此,制造业对于现代测控工程技术专业的人才需求非常大。
二、航空航天在航空航天领域,现代测控工程技术起到了至关重要的作用。
航空航天器的设计、制造、测试和运行都需要精确的测量和控制技术。
例如,航空航天器的结构强度测试、燃料流量的测量、空气动力学参数的获取等都需要现代测控工程技术的支持。
因此,现代测控工程技术专业的毕业生在航空航天领域有着广阔的就业机会。
三、能源领域在能源领域,现代测控工程技术也发挥着重要作用。
能源的开发和利用需要对各种参数进行测量和控制,以保证能源的高效利用和安全运行。
例如,核能、风能、太阳能等能源的测量和控制技术都是现代测控工程技术的研究方向之一。
同时,电力系统的监测与控制也需要现代测控工程技术的支持。
因此,能源领域对于现代测控工程技术专业的人才需求非常大。
四、医疗领域现代测控工程技术在医疗领域也有着广泛的应用。
医疗设备的研发和生产需要现代测控工程技术的支持,以确保医疗设备的准确性和安全性。
同时,医疗器械的监测和控制也需要现代测控工程技术的支持。
例如,心电图、血压监测仪、呼吸机等医疗设备的精确测量和控制都依赖于现代测控工程技术。
因此,医疗领域对于现代测控工程技术专业的人才需求也非常大。
现代测控工程技术专业的就业方向非常广泛,涵盖了制造业、航空航天、能源、医疗等多个领域。
随着科技的不断发展,对于测量和控制的需求也越来越大。
因此,现代测控工程技术专业的毕业生在就业市场上有着广阔的发展前景。
现代控制技术

❖
离散状态方程为
x(k 1) Fx(k) y(k) Cx(k)
Gu (k )
F eAT
G
T eAt dtB
0
❖控制规律为线性状态反馈 u(k) Lx(k)
❖闭环系统旳状态方程为 x(k 1) (F - GL)x(k)
❖闭环系统旳特征方程为 zI F GL 0
❖设给定所需要旳闭环 (z) (z z1)(z z2 ) (z zn )
xˆ (k 1) Fxˆ Gu(k) K y(k) Cxˆ(k)
u (k )
x(k)
y(k )
对象 F、G
C
模型 F、G xˆ(k )
+ yˆ (k ) C
K
❖ 设计观察器旳关键-增益矩阵 K
❖ 假如出现观察器期望旳极点 zi,求得观察器期 望旳特征方程为
(z) (z z1)(z z2 ) (z zn )
❖ 状态重构误差为
xb (k 1) xb (k 1) xˆ b (k 1) (Fbb KFab ) xb (k) xˆ b (k)
(Fbb KFab )xb (k)
❖ 降阶观察器旳状态重构
误差旳特征方程为
zI Fbb KFab 0
(z) zI Fbb KFab
❖ 观察器旳增益矩阵K可由上式求得。 ❖ 对于任意给定旳极点,具有唯一解旳充分必
任意指定旳位置。
例5.2 被控对象旳传递函数
G(s)
1 s2
采样周期T=0.1s,采用零阶保持器。
现要求闭环系统旳动态响应相当于阻尼系
数ζ= 0.5,无阻尼自然振荡频率ωn=0.36旳二 阶连续系统,用极点配置措施设计状态反馈
控制规律L,并求U(k)。
5.2.2 按极点配置设计状态观察器
学科代码、名称
学院网址:/
咨询电话:86413406
全日制招生学科目录
学科代码、名称
考试科目
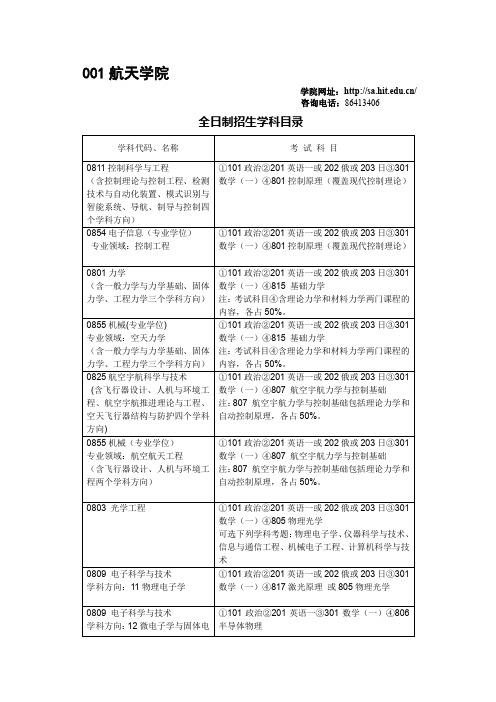
0811控制科学与工程
(含控制理论与控制工程、检测技术与自动化装置、模式识别与智能系统、导航、制导与控制四个学科方向)
①101政治②201英语一或202俄或203日③301数学(一)④801控制原理(覆盖现代控制理论)
0854电子信息
(专业学位)
专业领域:11空间光学
①101政治②201英语一或202俄或203日③301数学(一)④805物理光学
0854电子信息
(专业学位)
专业领域:12光电子信息工程
①101政治②201英语一或202俄或203日③301数学(一)④817激光原理或805物理光学
0854电子信息
(专业学位)
815
基础力学
《理论力学》(I)(第8版)
哈尔滨工业大学理论力学教研室编
高等教育出版社,2016年
新编材料力学(第2版)
张少实
机械工业出版社,2010年
材料力学(第6版I、II)
刘鸿文
高等教育出版社,2017年
807
航空宇航力学与控制基础
《理论力学(Ⅰ)第八版》
哈工大理论力学教研室
高等教育出版社
《自动控制原理》
鄢景华
哈工大出版社
805
物理光学
《物理光学》(第3版)
梁铨廷
电子工业出版社
《物理光学与应用光学》(第2版)
石顺祥
西安电子科大出版社
817
激光原理
«激光原理»第五版
周炳琨等
国防工业出版社2004
«光电子学原理与应用»
王雨三等
现代测试技术课程教学大纲
《现代测试技术》课程简介课程内容:现代测试技术是一门用以培养学生材料结构分析与测试技能的专业选修课.通过学习使学生掌握X射线衍射和电子显微技术的基础理论,试验方法及基本技能;掌握X射线衍射仪,透射电镜,扫描电镜和电子探针等现代测试设备的结构及其在材料分析测试技术中的原理及试验方法.应用X射线衍射方法进行晶体结构的测定,物相分析,宏观应力测定;掌握透射电镜的复型和薄膜制备技术及电子衍射的原理,应用电子衍射对材料进行微关组织结构的分析,应用扫描电镜和电子探针对材料进行表面形貌和微观结构及成分进行分析. 以培养学生使用分析测试方法为材料科学研究服务.本课程主要内容包括:X射线衍射学,透射电子显微学,扫描电子显微镜,电子探针,光谱分析等.Brief IntroductionCourse Description:Modern Techniques of Measurement is one of elective course to train pupils techniques of material structure analyzing and testing.Through learning students can understand the modern testing equipment, theory and method such as X-ray diffractometer, transmission electron microscopy, scanning election microscopy and electron probe. Crystal structure can be tested, contents can be analyzed and macro-stress can be measured by using X-ray diffraction. Surface morphology, microstructures and component of materials can be measured by using scanning election microscopy and election probe.The main sections of this course: X-ray diffraction, transmission election microscopy, scanning electron microscopy, electron probe, spectral analysis.一、教学内容第一章X射线的性质1.1 X射线的本质1.2 X射线谱1.3 X射线与物质相互作用教学重点:掌握X射线谱产生的机理.教学难点:X射线的吸收,相干散射和非相干散射.第二章X射线运动学衍射理论2.1 X射线衍射方向2.2 布拉格方程的讨论2.3 倒易点阵2.4 X射线衍射强度教学重点:掌握布拉格方程成立条件,掌握倒易空间中的爱瓦尔德图解.教学难点:X射线衍射强度与结构因子的关系,以及结构因子的定义.第三章多晶体X射线衍射分析方法3.1 粉末照相法3.2 X射线衍射仪教学重点:理解德拜照相法,掌握衍射仪的测量方法.教学难点:X射线衍射峰位的指标化.第四章X射线衍射方法的实际应用4.1 点阵常数测量4.2 物相分析4.3 宏观应力测定教学重点:掌握X射线衍射仪的点阵常数的精确测定,掌握物相定量分析方法,理解X射线应力测定原理.教学难点:X射线应力测定实验精度的保证及测试原理的适用条件.第五章透射电子显微分析5.1 透射电镜的结构及应用5.2 电子衍射5.3 金属薄膜的透射电子显微分析教学重点:掌握透射电镜成像原理,了解透射电镜的结构.教学难点:透射电镜衍射花样的标定.第六章扫描电子显微分析6.1 扫描电镜工作原理,构造和性能6.2 扫描电镜在材料研究中的应用6.3 波谱仪结构及工作原理6.4 能谱仪结构及工作原理6.5 电子探针分析方法及微区成分分析技术教学重点:掌握扫描电镜成像原理,掌握扫描电镜在材料研究中的应用,了解扫描电镜的结构.教学难点:扫描电镜能谱线分析.第七章表面成分分析7.1 俄歇电子能谱7.2 原子探针显微分析教学重点:掌握俄歇电子能谱在材料研究中的应用.教学难点:纳米级表面成分定量分析.第八章电子显微技术的新进展及试验方法选择8.1 电子显微术的新进展8.2 现代显微分析方法选择第九章高分子材料分析技术和红外与拉曼光谱简介9.1 高分子材料分析技术9.2 红外与拉曼光谱二、教学基本要求第一章X射线的性质教学要求:掌握X射线的本质;熟悉X射线的产生装置;掌握X射线谱产生的实质;了解X射线谱的实验规律;了解X射线与物质的相互作用;掌握吸收限的应用.第二章X射线运动学衍射理论教学要求:了解X射线的衍射方向,掌握布拉格衍射定律;了解衍射与反射的本质区别;理解倒易点阵在X射线衍射中的应用;掌握X射线衍射强度的含义.第三章多晶体X射线衍射分析方法教学要求:掌握X射线衍射方法;理解粉末照相法和X射线衍射仪的原理和结构;掌握初步操作设备仪器的能力.第四章X射线衍射方法的实际应用教学要求:掌握多晶体的物相分析原理;掌握PDF卡片的内容及含义;掌握物相定性分析方法;了解物相定量分析方法;注意实际分析时的难点及注意事项;了解三类应力的实质;掌握X射线应力测定的基本原理;并根据基本原理了解试验方法;明确试验精度的保证及测试原理的使用条件.第五章透射电子显微分析教学要求:了解透射电镜的结构及应用;掌握透射电镜成像原理;掌握透射电镜的复型技术和方法;简单了解电子衍射方法;能够进行薄膜样品制备;熟悉透射电镜分析方法.第六章扫描电子显微分析教学要求:了解扫描电镜的结构及应用;掌握扫描电镜成像原理;熟练掌握扫描电镜的主要性能;样品制备方法;熟悉扫描电镜分析方法;可举例说明扫描电镜在材料研究中的应用;掌握扫描电镜断口分析;熟悉波谱仪和能谱仪工作原理及应用条件;掌握电子探针分析方法及微区成分分析技术。
现代控制工程(第四版)

20xx年电子工业出版社出版的图书
01 推荐
03 书籍目录
目录02 主要内容源自基本信息《现代控制工程(第四版)》是2007年8月电子工业出版社出版的一本书籍,作者是[美]尾形克彦,译者是 卢伯英等。
推荐
推荐
《现代控制工程》(第4版)是一本为工科高年级学生写的教科书,可以作为控制系统领域的首门课程的教 材。
第11章
控制系统的状态空间分析 11.1引言 11.2传递函数的状态空间表达式 11.2.1状态空间标准形的表达式 11.2.2 n×n维矩阵A的特征值 11.2.3 n×n维矩阵的对角化 11.2.4特征值的不变性 11.2.5状态变量组的非惟一性 11.3用MATLAB进行系统模型变换 11.3.1传递函数系统的状态空间表达式 11.3.2由状态空间表达式到传递函数的变换
第8章
频率响应分析 8.1引言 8.1.1求系统对正弦输入信号的稳态输出 8.1.2用图形表示频率响应特性 8.1.3本章要点 8.2伯德图 8.2.1伯德图或对数坐标图 8.2.2 G(jω)H(jω)的基本因子 8.2.3增益K 8.2.4积分和微分因子 (jω)1? 8.2.5一阶因子(1+jωT)???1?
第12章
控制系统的状态空间设计 12.1引言 12.2极点配置 12.2.1极点配置设计 12.2.2任意配置极点的充分必要条件 12.2.3用变换矩阵T确定矩阵K 12.2.4用直接代入法确定矩阵K 12.2.5用爱克曼公式确定矩阵K 12.2.6调节器系统和控制系统 12.2.7选择希望的闭环极点的位置 12.2.8注释
第2章
拉普拉斯变换 2.1引言 2.2复变量和复变函数 2.2.1复变量 2.2.2复变函数 2.2.3尤拉定理 2.3拉普拉斯变换 2.3.1拉普拉斯变换的存在 2.3.2指数函数 2.3.3阶跃函数 2.3.4斜坡函数
哈工大硕士研究生培养方案,DOC
哈尔滨工业大学硕士研究生培养方案REQUIREMENTS OF MASTER TRAINING PROGRAMMES研究生院2015-09前言研究生培养方案是研究生培养过程的指导性文件,是制定研究生个人培养计划、完成培养工作各个环节和衡量培养质量的重要依据。
随着我国科技、教育事业的蓬勃发展,我校的学科建设、科学研究和人才培养都进入了新的阶段。
2013年为使我校硕士研究生教育更好地适应发展形势的需要,为在硕士研究生培养工作中进一步明确定位、保证质量,学校组织各硕士学位授权点对我校硕士生培养方案进行了重新修订。
我校硕士研究生培养模式改革工作进一步深化,全校25个一级学科开展了培养模式改革工作,分别制定了学术研究型和应用研究型培养方案。
新的硕士研究生培养方案,对具有一级学科授权的学科,是按照一级学科或“一级学科学位课平台+方向模块”制定的;对于目前没有一级学科授予权的单位,是将二级学科进行有机的整合后,在所属一级学科范围内制定的。
新的培养方案以“宽口径、厚基础”为基本原则,从培养创新性人才的需要出发,科学、系统地设计了课程学习、科学研究、论文工作和学术交流等培养环节。
在课程设置上既注重基础性,又体现宽广性和实用性,保留了反映当代学科发展趋势和前沿性最新成果的专题课程,为拓宽研究生的视野,加强研究生综合业务素质的培养创造了条件,为了培育国际一流课程体系,在部分一级学科还特别增设了一批与国际高水平学者合作共建的课程。
新修订培养方案覆盖全校38个一级学科、7个专业学位类别、16个专业学位领域,总共64套。
共设置课程1766门,其中学位课675门,选修课717门,专题与实践课307门,含实验课程326门、补修课67门。
新修订的硕士研究生培养方案凝聚了我校各院(系)、各学科专家和研究生导师以及相关管理人员的智慧和经验。
新的硕士研究生培养方案的实施将更为有效地推进我校研究生教育的规范化、科学化。
本方案为2014年修订版本,供2014年9月以后入学研究生使用。
控制科学与工程一级学科硕士研究生培养方案
控制科学及工程一级学科硕士研究生培养方案(学科代码0811)一、学科简介控制科学及工程一级学科是以工程技术领域内的控制系统为对象,采用现代控制理论和方法以及传感器仪表、电子测量、计算机及通讯、图象处理、模式识别等技术,研究系统运行过程的建模、分析、设计、实现和优化控制的理论、方法和技术的一门学科。
本学科针对经济建设和社会发展中出现的各类复杂控制问题,研究、应用和发展新的控制理论和控制技术,以推动它们在工程和国民经济其他领域中的有效应用,从而产生显著的经济和社会效益。
目前主要研究方向有:非线性系统分析、建模及控制、智能控制理论及应用、复杂工业过程综合自动化、过程监测、诊断及优化控制、现场总线及网络控制, 决策及管理一体化技术、信号检测及智能仪表、光电测量及控制、智能信息处理及系统、图像处理及分析、模式识别及机器视觉、机器人技术及应用等。
它包含了本学科领域的基础理论研究、应用技术开发和工程项目实现三个不同层次,对于提高自动化技术领域的学术研究水平,服务于经济建设和实现国防军事现代化具有重要意义。
控制科学及工程学科是安徽工业大学最早建立的优势学科之一。
自1978年开始招收自动化专业本科生,后来又相继招收测控技术及应用和计算机专业本科生;1991年开始及东北大学和北京科技大学联合培养硕士生,1999年获得检测技术及自动化装置硕士学位授权点,后来又于2003年、2007年相继获得控制理论及工程、模式识别及智能系统学2个硕士学位授权点,2009年获得控制工程领域工程硕士学位授予点,并及合肥工业大学、安徽大学联合招收培养博士生,2010年成为博士学位授予点建设支撑学科。
2008年,检测技术及自动化学科成为安徽省重点学科。
本学科设有“电力电子及运动控制安徽省重点实验室”,西门子过程装备及控制工程研究中心、安徽省电子及自动化技术实验教学示范中心、传感器及仪表设计研究所、测控技术研究所、复杂系统建模及化控制研究所、系统集成及综合自动化技术研究所、运动控制及工业机器人应用研究所。
现代电气控制技术
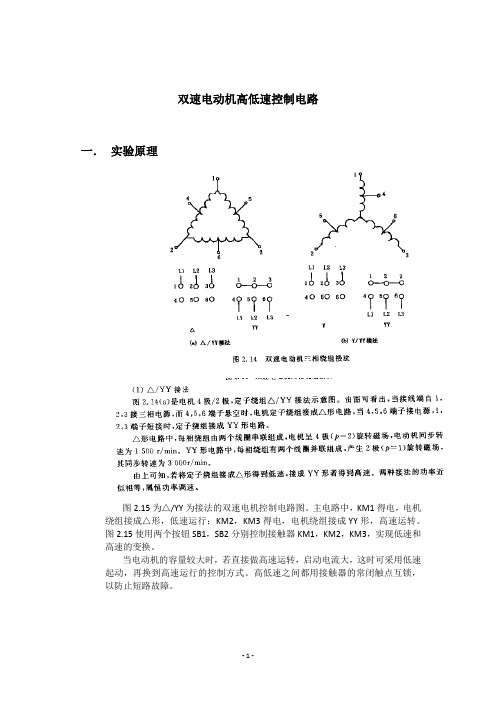
双速电动机高低速控制电路一.实验原理图2.15为△/YY为接法的双速电机控制电路图。
主电路中,KM1得电,电机绕组接成△形,低速运行;KM2,KM3得电,电机绕组接成YY形,高速运转。
图2.15使用两个按钮SB1,SB2分别控制接触器KM1,KM2,KM3,实现低速和高速的变换。
当电动机的容量较大时,若直接做高速运转,启动电流大,这时可采用低速起动,再换到高速运行的控制方式。
高低速之间都用接触器的常闭触点互锁,以防止短路故障。
二.实验目的1.掌握双速电机的Δ/YY高低速控制电路的工作原理。
2.熟悉实验线路的故障分析及排除故障的方法。
三.实验内容双速电动机Δ/YY高低速控制线路。
四.实验步骤1.检查各实验设备外观及质量是否良好。
2.按图2.15双速电动机Δ/YY高低速控制线路进行正确接线,先接主回路,再接控制回路。
自己检查无误并经指导老师检查认可方可合闸实验。
(注意:电机运行时间不宜过长)(1)合上漏电保护断路器和空气开关QF,引入三相电源。
(2)按下起动按钮SB2,观察接触器、电动机的工作情况。
(注意:电机运行时间不应过长)(3)按下起动按钮SB3,观察电动机的转速。
(4)按下停止按钮SB1,断开电机控制电源。
(5)断开空气开关QF,切断三相主电源。
(6)断开漏电保护断路器,关断总电源。
五.动作流程SB2开关闭合→KM1线圈得电→KM1自锁→KM1触点闭合(至此完成星形起动)SB3开关闭合→KM1线圈失电→KM1触点断开SB3开关闭合→KM2、KM3线圈得电→KM2自锁→KM2、KM3触点接通(完成YY 型接法)按下SB1按钮结束实验六.实验感想在实验中,我们组有些细节没有做好。
原本可以很快的完成实验,但却因为我们的粗心,导致严重拖延我们组的实验速度。
一开始,我们以为导线都是完好正常的,也就没有用万用表一根根测试,等到最后线连好后,老师过来检查上电,发现实验结果不正确。
连线都没问题,所以我们组的成员不得不把导线一根根的检查,花了不少时间,最后终于把那根断了的导线找出来,使得我们的实验才得以成功完成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《现代控制工程及测试技术》作业班级:硕911姓名:***学号:**********1. 用MATLAB 求解微分方程的不同命令求解如下微分方程。
5.02d d 3d d 2d d 2233=+++y ty t yt y,2.0)0(,4.0)0(,0)0(-===y y y 1) 至少选用两种求解微分方程的命令;2) 在同一幅图上,用不同属性、颜色的曲线表示)(t y 和)(t y; 解:编写m 文件程序如下:%------第一种方法采用函数ode23或ode45解----clear all;close all;t0=0;tf=15;y0=[0,0.4,-0.2]';[t,y]=ode23('vdpl',t0,tf,y0);figure(1)plot(t,y(:,1),'g-',t,y(:,2),'r--')title('用ode23函数实现微分方程的数值解')xlabel('time/sec')ylabel('value')legend('y','y''')grid%-------第二种方法采用dsolve 函数求解-----t1=0:0.05:15y=dsolve('D3y+2*D2y+3*Dy+2*y=0.5','y(0)=0,Dy(0)=0.4,D2y(0)=-0.2') s=subs(y,t1);dy=diff(y);s1=subs(dy,t1);figure(2)plot(t1,s,'g-',t1,s1,'r--')title('用dsolve 函数实现微分方程的符号解')xlabel('time/sec')ylabel('value')legend('y','y''')grid在方法一中将高阶微分方程等效表达成一阶微分方程组的程序如下:function xdot=vdpl(t,x)xdot=zeros(3,1);xdot(1)=x(2);xdot(2)=x(3);xdot(3)=-2.*x(3)-3.*x(2)-2.*x(1)+0.5;程序运行的结果及输出图形如图1.1,图1.2所示:y=1/4-3/20*exp(-t)+2/35*7^(1/2)*exp(-1/2*t)*sin(1/2*7^(1/2)*t)-1/10*exp(-1/2*t)*c os(1/2*7^(1/2)*t)dy=3/20*exp(-t)+3/140*7^(1/2)*exp(-1/2*t)*sin(1/2*7^(1/2)*t)+1/4*exp(-1/2*t)*cos (1/2*7^(1/2)*t)图1.1 用ode23函数求微分方程的解及解的一阶导数图1.2 用dsolve 函数及diff 函数求微分方程的解及解的一阶导数2. 负反馈系统的前向通道和反馈通道传递函数分别为205164)(23++++=s s s s s G ; )5)(3()1(2)(+++=s s s s H 1) 求闭环系统的标准传递函数模型,零极点增益模型,状态空间模型;并将状态空间表达模型转换成可控标准型和可观测标准型。
2) 用传递函数模型求系统的单位阶跃响应;用零极点增益模型求单位斜坡响应;用状态空间表达模型求单位脉冲响应。
解:编写m 文件程序如下:%-------------------------第二题----------------------clear all;close all;sys1=tf([4,16],[1,1,5,20]); %前向通道传递函数sys2=zpk([-1],[-3,-5],2); %反馈通道传递函数%-------生成标准传递函数模型、零极点增益模型、状态空间模型disp('闭环系统的零极点增益模型为:')zpksys=feedback(sys1,sys2)[num,den]=tfdata(zpksys,'v');disp('闭环系统的标准传递函数模型为:')tfsys=tf(num,den)disp('闭环系统的状态空间模型为:')[A,B,C,D]=ssdata(zpksys)abcdsys=ss(zpksys)%-------下面将状态控制模型转换成可控标准型和可观测标准型%------- 判断系统是否可控M=ctrb(A,B);r1=rank(M);l1=length(A);if r1<l1disp('系统是状态不完全可控的!');elsedisp('系统是状态完全可控的!');disp('将状态空间模型转换为可控标准型:')JA=poly(A);a4=JA(2);a3=JA(3);a2=JA(4);a1=JA(5);a0=JA(6);W=[a1 a2 a3 a4 1;a2 a3 a4 1 0;a3 a4 1 0 0;a4 1 0 0 0;1 0 0 0 0];%计算变换矩阵TT=M*W;Ac=inv(T)*A*TBc=inv(T)*BCc=C*TDc=Dend%---------判断系统是否可观V=[C' A'*C' A'*A'*C' (A')^3*C' (A')^4*C'];r2=rank(V);l2=size(A,1);if r2<l2disp('系统是不完全可观的');elsedisp('系统是状态完全可观的');disp('将状态空间模型转换为可观测标准型:')%计算变换矩阵QQ=inv(W*V');Ag=inv(Q)*A*QBg=inv(Q)*BCg=C*QDg=Dend%-------求系统的单位阶跃响应,单位斜坡响应,单位脉冲响应t1=0:0.2:5;figure(1)step(tfsys,t1) %传递函数模型求系统的单位阶跃响应title('传递函数模型求系统的单位阶跃响应');grid%-------零极点增益模型求单位斜坡响应%-------转换为求zpksys与1/s乘积的单位阶跃响应zpk2sys=zpk([],[0],1); %zpk2sys=1/sG=series(zpksys,zpk2sys);t2=0:0.2:5;figure(2)step(G,t2);title('零极点增益模型求单位斜坡响应');grid%------用状态空间模型求单位脉冲响应t3=0:0.2:5;figure(3)impulse(A,B,C,D,1,t3)title('状态空间模型求单位脉冲响应');grid程序运行的结果如下:1)闭环系统的零极点增益模型为:Zero/pole/gain:4 (s+3) (s+4) (s+5)-----------------------------------------------------(s+3.332) (s+5.153) (s+2.029) (s^2 - 1.514s + 9.532)闭环系统的标准传递函数模型为:Transfer function:4 s^3 + 48 s^2 + 188 s + 240-------------------------------------------s^5 + 9 s^4 + 28 s^3 + 83 s^2 + 275 s + 332闭环系统的状态空间模型为:A =0.7568 2.9931 -0.7916 1.4741 0-2.9931 0.7568 -0.3522 0.6558 00 0 -5.1533 2.1479 00 0 0 -3.3316 2.00000 0 0 0 -2.0288B =4C =3.2269 0 -0.2685 0.5000 0D =系统是状态完全可控的!将状态空间模型转换为可控标准型:Ac =-0.0000 1.0000 -0.0000 -0.0000 -0.0000 -0.0000 0.0000 1.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 1.0000 0.00000.0000 0.0000 0.0000 0.0000 1.0000 -332.0000 -275.0000 -83.0000 -28.0000 -9.0000 Bc =0.0000-0.0000-0.00000.00001.0000Cc =240.0000 188.0000 48.0000 4.0000 0Dc =系统是状态完全可观的将状态空间模型转换为可观测标准型:Ag =0.0000 -0.0000 0.0000 -0.0000 -332.00001.0000 -0.0000 0.0000 -0.0000 -275.00000.0000 1.0000 0.0000 0.0000 -83.00000.0000 -0.0000 1.0000 0.0000 -28.00000.0000 -0.0000 0.0000 1.0000 -9.0000 Bg =240.0000188.000048.00004.0000-0.0000Cg =0.0000 -0.0000 0.0000 -0.0000 1.0000 Dg =2)运行结果如图2.1、图2.2、图2.3所示:图2.1 传递函数模型求系统的单位阶跃响应图2.2 零极点增益模型求单位斜坡响应图2.3 状体空间模型求单位脉冲响应3. 设反馈系统的开环传递函数为 )164)(1()1()()(2++-+=s s s s s K s H s G1) 绘制系统的根轨迹。
2) 确定系统稳定时的K 值范围。
解:编写m 文件程序如下:%----------第三题------------clear allclose allnum=[1 1];den=conv(conv([1,0],[1,-1]),[1,4,16]);G=tf(num,den)rlocus(G) %求系统的根轨迹gridxlabel('实轴');ylabel('虚轴');title('根轨迹图');%-----下面求根轨迹与虚轴交点的增益及频率[K,Wcg]=plzy(G)程序运行结果如图3所示:图3 系统的根轨迹图K =23.3163 35.6837Wcg =1.56162.5615从图3中可以看出,使系统稳定的K 值的取值范围为:23.316335.6873K << 此时对应的频率为1.5616 rad/s 和2.5615 rad/s 。