Matlab代码生成RTW
matlab real time(Xpc target)使用详解

下位机成功进入xpc
XPC Target流程
2、启动下位机与上位机进行连接
2.2 插入U盘启动下位机
右下角显示的为下位机自己的IP地址
上位机打开命令行,ping下位机ip检 测是否连通
XPC Target流程
2、启动下位机与上位机进行连接
2.2 插入U盘启动下位机
在matlab中命令行输入 xpc 检测是否 连接成功
Xpc Target (Matlab Real Time)
快速原型 讲解
XPC Target简介
xPC Target是MathWorks公司开发的一 个基于RTW体系框架的实时目标系统产 品,可将标准的PC兼容机转变为一个实 时系统,来实现控制系统或DSP系统的 快速原型化、硬件在回路中的测试和系 统半实物仿真等功能。随着目前PC兼容 机的普遍使用,从而xPC Target提供了 一种造价低廉的、性能较高的并且便捷 的实时应用系统。 xPC Target采用了宿主机-目标机的技术 实现途径,即“双机”模式,宿主机和目 标机可以是不同类型的计算机,两者之 间通过以太网或串口实现通讯。
XPC Target流程
2、启动下位机与上位机进行连接
2.2 插入U盘启动下位机 按F2或F12或delete加入bios
Bios界面
XPC Target流程
2、启动下位机与上位机进行连接
2.2 插入U盘启动下位机
启动选项 选择之前制作的启动U盘进行启动, 注意不要选择UEFI模式,选择 legacy模式
上位机虚拟被控对象程序
下位机显示
XPC Target流程
3、上位机编写程序烧入下位机
实际物理设备程序程序
XPC Target流程
用matlab建立传递函数模型

用matlab建立传递函数模型使用MATLAB建立传递函数模型在控制系统的设计和分析中,传递函数模型是一个重要的工具。
它可以帮助我们理解系统的动态行为,并提供一种有效的方式来设计控制器。
在本文中,我们将介绍如何使用MATLAB来建立传递函数模型,并展示如何利用该模型进行系统分析和控制器设计。
传递函数模型是一种数学模型,用于描述线性时不变系统的输入和输出之间的关系。
它可以表示为一个分子多项式除以一个分母多项式的比值。
在MATLAB中,我们可以使用tf函数来创建传递函数模型。
我们需要准备一个分子多项式和一个分母多项式。
这些多项式的系数可以通过实验数据或系统参数估计得到。
然后,我们可以使用tf 函数将这些多项式转换为传递函数模型。
例如,如果我们有一个二阶系统,其传递函数模型为:G(s) = (b0*s^2 + b1*s + b2) / (a0*s^2 + a1*s + a2)其中,b0、b1、b2是分子多项式的系数,a0、a1、a2是分母多项式的系数。
在MATLAB中,我们可以使用以下代码创建传递函数模型:b = [b0, b1, b2]; % 分子多项式的系数a = [a0, a1, a2]; % 分母多项式的系数G = tf(b, a); % 创建传递函数模型创建传递函数模型后,我们可以使用MATLAB提供的各种函数来进行系统分析和控制器设计。
例如,我们可以使用step函数来绘制系统的阶跃响应,使用bode函数来绘制系统的频率响应,使用pole 函数来计算系统的极点等等。
MATLAB还提供了一些用于控制器设计的工具箱,如Control System Toolbox和Robust Control Toolbox。
这些工具箱中包含了各种用于系统分析和控制器设计的函数和工具,可以帮助我们更方便地进行控制系统的设计和分析工作。
使用MATLAB建立传递函数模型是一种强大的工具,可以帮助我们理解系统的动态行为,并进行控制器设计。
emlc——让MATLAB的代码进入单片机
emlc——让MA TLAB的代码进入单片机通常情况下,如果我在MATLAB上完成了某个功能(比如某图像识别的算法),却想把它用在单片机上,需要自己再写一遍C的代码。
(我这里说的单片机确切的来说还是指所有微控制器比较好)。
但有了emlc,事情将被大大简化。
本文旨在初步介绍emlc,更多内容请查看MathWorks公司的官方资料。
emlc是MATLAB中的一条命令,可以将MA TLAB的代码转为C语言,在我看来,这应该算得上是每一位嵌入式开发者的有力工具了。
在MATLAB中输入help emlc,就可以看到它的帮助文件,其中第一句话就是非常令人兴奋的:"EMLC Generate C code from MATLAB code.―,接下来是它的用法:"EMLC [-options] [files] fun1 [fun2 ...]‖。
读者在看emlc用法之前最好先看看这3篇文章,确保各项准备工作齐全后再进行试验。
《在emlc之前要做好的事情(1)》《在emlc之前要做好的事情(2)》《在emlc之前要做好的事情(3)》本人认为emlc中比较重要的参数有以下几个:-T <TYPE> 用来控制输出格式。
其中<TYPE>有如下几种选择:MEX - 生成一个C-MEX的函数(默认)。
RTW - 生成嵌入式C代码,并生成相应的库文件。
RTW:LIB - 同上。
RTW:EXE - 生成C代码,并生成相应的EXE文件。
-c 意思是只生成代码,不进行编译(没有.o文件),这样做的前提是在-T RTW的情况下。
这样做可以方便快速的进行转换和更改。
-d 设置输出目录。
-eg 设置函数参数的类型。
一般如果你的函数有输入的参数,那最好在emlc中加上这个。
具体用法见下面的实例。
-o 设置输出文件的文件名-report 返回emlc的提示信息,包括错误信息,这个会有助于程序的调试。
基于Matlab与STM32的电机控制代码自动生成

基于Matlab与STM32的电机控制代码自动生成徐捷;丁学明【摘要】基于Matlab与STM32的代码自动生成方法与无刷直流电机控制系统相结合,使得控制系统的设计与实现更为方便快捷.通过对无刷直流电机控制系统进行Matlab仿真模型设计,再利用针对STM32微型控制器的Simulink库STM32 MAT/Target与相关软件工具,实现可读、可移植的C代码工程文件的自动生成,并在STM32F103上实际运行,其运行状态与仿真结果基本一致.该方法既通过Matlab的仿真对控制系统进行精确的设计,又利用其自动生成代码的特点便于控制算法的实现,两者相互结合,在保证准确性的同时加快了从设计到实现的整个过程.【期刊名称】《电子科技》【年(卷),期】2017(030)004【总页数】4页(P148-151)【关键词】STM32;Matlab;无刷直流电机;自动生成代码【作者】徐捷;丁学明【作者单位】上海理工大学光电与计算机工程学院,上海200093;上海理工大学光电与计算机工程学院,上海200093【正文语种】中文【中图分类】TN873;TM36+1STM32系列微控制器是一款基于ARM Cortex-M3内核的嵌入式应用产品[1-3]。
由于其高性能、低成本、低功耗的特性使其应用领域不断扩大,对于其高效地开发和利用便更为重要[4-5]。
随着STM32 MCU生成代码的功能获得了MathWorks 的全面支持,使软件开发人员能够在Matlab和Simulink环境中开发算法,然后在处理器在环(PIL)仿真中编译目标,集成、调试和测试这些模型。
Embedded Coder生成的C代码运行于STM32评估板上,Keil?微控制器开发套件 (MDK-ARM?)的调试器与Simulink直接交互,进一步简化了代码集成过程[6-7]。
相较于传统的固件库和寄存器的人工编写方式,Matlab仿真后生成C代码工程文件的模式更为便捷,对于其开发效率更高。
rtwbuild函数
rtwbuild函数rtwbuild函数是MATLAB中的一个用于将模型编译为可执行文件的函数。
当使用MATLAB进行软件开发时,经常需要将模型部署到其他计算机上,此时就可以使用rtwbuild函数来生成可执行文件,使模型在其他计算机上能够独立运行。
rtwbuild函数的语法如下:```rtwbuild('model_name')```其中,`model_name` 是需要编译的模型文件的名称。
编译后的可执行文件将默认生成在当前目录下。
编译过程中,rtwbuild函数会将模型转化为C代码,并且针对不同的目标平台进行优化。
在编译过程中可以通过设置编译选项进行自定义配置,以满足特定需求。
编译选项可以在rtwbuild函数的参数中进行设置,如下所示:```rtwbuild('model_name', 'option1', value1, 'option2', value2, ...)```下面是一些常用的编译选项:1. 'TargetLang':指定生成代码的目标语言。
可以选择的语言包括C、C++、Ada等。
例如,要生成C++代码,可以设置为:```rtwbuild('model_name', 'TargetLang', 'C++')```2. 'TargetEnv':指定代码生成的目标平台。
可以选择的平台有MATLAB、Simulink、Embedded Coder等。
例如,要生成嵌入式系统的代码,可以设置为:```rtwbuild('model_name', 'TargetEnv', 'Embedded Coder')```3. 'GenCodeOnly':仅生成代码,不进行编译。
这在需要手动进行编译或调试时非常有用。
matlab加工自由曲面程序代码
一、引言Matlab是一种高级技术计算语言和交互环境,被广泛用于工程、科学和数学领域的计算与模拟。
在Matlab中,加工自由曲面是一项常见的任务,例如创建和修改三维曲面模型。
本文将介绍如何使用Matlab 编写程序代码来加工自由曲面,以实现对曲面的精确控制和调整。
二、准备工作在编写程序代码之前,首先需要明确自由曲面的定义和参数化方法。
自由曲面通常由参数方程或控制点构成,对于不同的曲面类型,需要选择合适的参数化方法。
还需要了解Matlab中与曲面加工相关的函数和工具,以便在编写程序时能够调用这些资源。
三、编写程序代码1. 定义自由曲面在Matlab中,可以使用符号变量和代数表达式定义自由曲面的参数方程。
对于二次曲面,可以使用二次多项式表示其参数方程。
具体代码如下:syms u vx = a*u^2 + b*v^2 + c*u*v + d*u + e*v + f;y = g*u^2 + h*v^2 + i*u*v + j*u + k*v + l;z = m*u^2 + n*v^2 + o*u*v + p*u + q*v + r;其中a-r为曲面的系数,u和v为曲面的参数。
2. 控制曲面形状通过调整曲面的参数和系数,可以控制曲面的形状。
可以通过改变系数a-r的值来实现对曲面的放大缩小、旋转、偏移等操作。
具体代码如下:a = 1;b = 1;c = 0;d = 0;e = 0;f = 0;g = 1; h = 1; i = 0; j = 0; k = 0; l = 0;m = 1; n = 1; o = 0; p = 0; q = 0; r = 0;这里以简单的二次曲面为例,通过调整系数的数值来控制曲面的形状。
3. 曲面绘制和可视化在定义和控制曲面之后,可以使用Matlab中的绘图函数将曲面绘制出来。
可以使用surf函数创建曲面图形,并通过设置图形属性来进行可视化调整。
具体代码如下:[u, v] = meshgrid(-2:0.1:2);x = a*u.^2 + b*v.^2 + c*u.*v + d*u + e*v + f;y = g*u.^2 + h*v.^2 + i*u.*v + j*u + k*v + l;z = m*u.^2 + n*v.^2 + o*u.*v + p*u + q*v + r;surf(x, y, z);四、应用实例在实际应用中,自由曲面加工可以用于创建各种复杂的曲面模型。
MATLAB_RTW__Engine操作步骤

1、搭建simulink模型输入幅度为3的阶跃信号进行测试得到输出为2、设置matlab新安装的matlab及vc,需要进行配置,在matlab窗口中输入mex –setup按提示进行默认配置即可。
3、设置仿真参数4、生成c代码生成文件在matlab当前目录下model_grt_rtw文件夹下5、新建vc工程(windows窗体程序)添加模型源文件(由simulink模型自动生成的)6、设置vc环境添加matlab相关文件引用7、项目属性设置对新增加的c源文件,修改预编译头工程属性8、文件修改model.h中增加//added by clh/////////////////////////////// extern void MdlOutputs(int_T tid);extern void MdlUpdate(int_T tid);extern void MdlInitializeSizes(void);extern void MdlInitializeSampleTimes(void); extern void MdlInitialize(void);extern void MdlStart(void);extern void MdlTerminate(void);extern RT_MODEL_model *model(void);///////////////////////////////////////////使用函数的文件(form1.h)中增加引用extern"C"{#include"model.h"#include"model_private.h"//#include "model_types.h"//#include "rtwtypes.h"//#include "rtmodel.h"//#include "rt_nonfinite.h" }Button按钮处理中增加得到输出结果结果一致。
matlab代码转换函数

matlab代码转换函数如何利用MATLAB进行代码转换函数在MATLAB编程中,代码转换函数是一个非常实用的工具,它可以将一个函数或脚本从一种编程语言转换为另一种编程语言。
这个功能在编写和维护代码时非常方便,特别是当你需要将已有代码转换为其他语言以适应不同环境或平台时。
本文将一步一步向你介绍如何利用MATLAB进行代码转换函数。
1. 确定你想要转换的代码首先,你需要决定你想要转换的函数或脚本。
这可以是任何语言的代码,如C++、Python、Java等。
选择一个你熟悉且想要转换的代码,以便更好地理解整个转换过程。
2. 安装代码转换工具包MATLAB自带的Symbolic Math Toolbox提供了一个强大的代码转换工具包,可以用于代码转换。
如果你还没有安装这个工具包,你需要在MATLAB中找到并安装它。
3. 创建转换函数在MATLAB中,你需要创建一个脚本或函数来执行代码转换。
在转换函数中,你需要定义输入和输出文件的路径,并使用MATLAB 提供的工具函数来执行实际的转换过程。
以下是一个示例转换函数的代码:matlabfunction convertCode(inputFile, outputFile)读取输入文件code = fileread(inputFile);执行代码转换convertedCode = codeConversion(code);写入输出文件fid = fopen(outputFile, 'w');fprintf(fid, 's', convertedCode);fclose(fid);end在这个示例中,`inputFile`是输入文件的路径,`outputFile`是输出文件的路径。
函数先读取输入文件中的代码,然后使用`codeConversion`函数将代码转换为目标语言。
最后,将转换后的代码写入输出文件。
4. 实现代码转换逻辑在转换函数中,你需要实现实际的代码转换逻辑。
MATLAB-Realtimeworkshop
MATLAB-Realtimeworkshop
1 从本质上讲,RTW是一种基于SIMULINK的自动实时代码生成环境,因此具有类似高级语言编译器的一些特性。
2 宿主机是指用户运行MATLAB、Simulink和RTW的计算机系统。
使用安装在宿主机上的程序生成工具,用户可生成代码和可运行于目标系统上的可执行程序。
3 目标机是指运行由RTW所生成的代码的计算机系统。
4 目标语言编译器(Target language compiler)是RTW的组成部分之一,用于将Simulink模块框图的中间描述文件(model.rtw)转换成C或Ada语言代码。
5 目标语言编译器文件(Target language compiler file) RTW使用目标语言编译器文件(缩写为TLC文件)将Simulink下创建的模型翻译为代码。
6 模板联编文件(Template makefile)是指可用来生成程序联编文件的模板文件,RTW就是通过模板联编文件从所生成的代码建立运行于选定的目标环境的可执行程序的。
matlab自动生成C代码
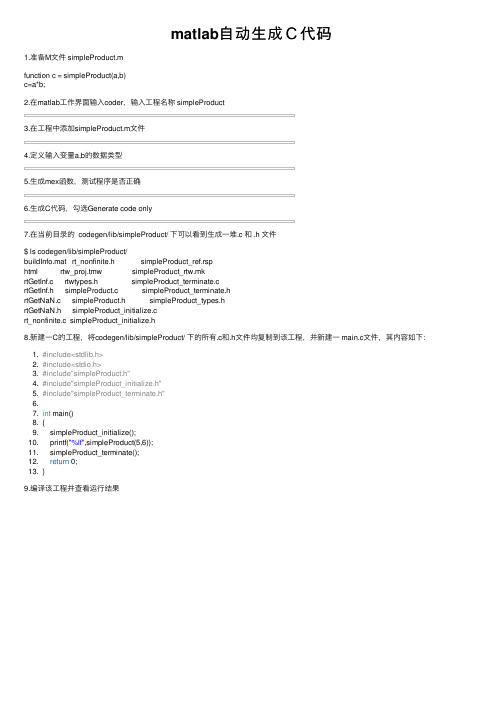
9.编译该工程并查看运行结果
simpleProduct_ref.rsp
html
rtw_proj.tmw
simpleProduct_rtw.mk
rtGetInf.c rtwtypes.h
simpleProduct_terminate.c
rtGetInf.h simpleProduct.c
simpleProduct_terminate.h
登录后才能查看或发表评论立即登录或者逛逛博客园首页
matlab自 动 生 成 C 代 码
1.准备M文件 simpleProduct.m function c = simpleProduct(a,b) c=a*b; 2.在matlab工作界面输入coder,输入工程名称 simpleProduct
3.在工程中添加simpleProduct.m文件
4.定义输入变量a,b的数据类型
5.生成mex函数,测试程序是否正确
பைடு நூலகம்
6.生成C代码,勾选Generate code only
7.在当前目录的 codegen/lib/simpleProduct/ 下可以看到生成一堆.c 和 .h 文件
$ ls codegen/lib/simpleProduct/
buildInfo.mat rt_nonfinite.h
1. #include<stdlib.h> 2. #include<stdio.h> 3. #include"simpleProduct.h" 4. #include"simpleProduct_initialize.h" 5. #include"simpleProduct_terminate.h" 6. 7. int main() 8. { 9. simpleProduct_initialize(); 10. printf("%lf",simpleProduct(5,6)); 11. simpleProduct_terminate(); 12. return 0; 13. }
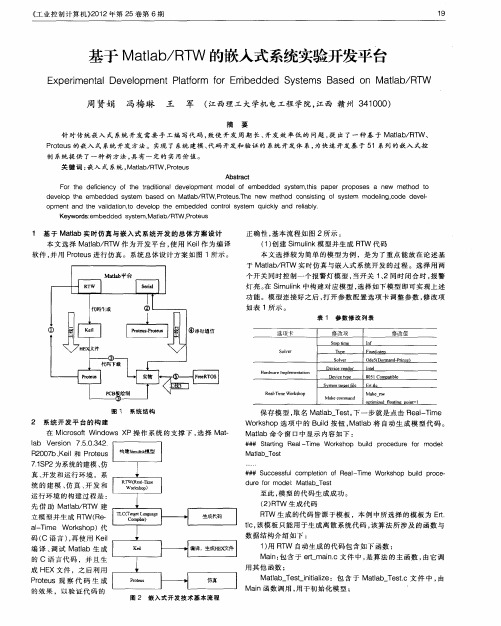
基于Matlab/RTW的嵌入式系统实验开发平台
修 改 值
S le ov r
1 e Ⅶ _ S le ov r De ie e d r vc n o v
Fx d s p ie -t e Od 5 Doa a d P i c ) e ( rln . rn e I tl ne 8 51 mD t l 0 CO ai e b Er t ti c M a e rw k t
如表 1 示 。 所
表 1 参 数 修 改 列 表
选 项 卡 修 改 项
So t tD i me If n
本 文 选 择 Malb R W 作 为 开 发 平 台 , 用 K i 为 编 译 t /T a 使 el 作 软 件 , 用 Poe s进 行 仿 真 。 系 统 总体 设 计 方 案 如 图 1 示 。 并 rtu 所
o t ie o t  ̄ pon=1 oi z d f ai m l n it
图 1 系 统 结 构
保 存 模 型 , 名 Malb T s。 一 步就 是 点 击 R a— i 取 t _ e t下 a e lTme
2 系统 开发 平 台 的构 建 在 Mi o otW i o P操 作 系 统 的支 撑 下 , 择 Ma- c sf r n ws X d 选 l
周 贤娟 冯 梅 琳 王 军 ( 江西理工大学机 电工程学院, 江西 赣州 3 1 0 ) 4 0 0
摘 要 针 对 传 统 嵌 入 式 系统 开发 需 要 手 工编 写代 码 , 使 开 发 周 期 长 、 致 开发 效 率 低 的 问 题 , 出 了 一 种 基 于 Ma l / T 、 提 tbRW a P oe s的嵌 入 式 系统 开发 方 法 。实现 了 系统 建模 、 码 开 发 和 验证 的 系统 开发 体 系, 快 速 开 发基 于 5 rtu 代 为 1系列 的嵌 入 式控 制 系统 提 供 了一 种 新 方 法 , 有 一 定 的 实 用 价值 。 具
MATLAB生成Word文档

MATLAB⽣成Word⽂档⼀、创建Microsoft Word服务器1. 创建Microsoft Word服务器try% 若Word服务器已经打开,返回其句柄WordWord = actxGetRunningServer('Word.Application');catch% 创建⼀个Microsoft Word服务器,返回句柄WordWord = actxserver('Word.Application');end2. 设置对象属性设置Word服务器为可见状态set(Word, 'Visible', 1); %或Word.Visible = 1;⼆、建⽴Word⽂本⽂档1. 新建空⽩⽂档%调⽤Add⽅法建⽴⼀个空⽩⽂档,并返回其句柄DocumentDocument = Word.Documents.Add;2. 页⾯设置%查看PageSetup接⼝的所有属性Document.PageSetup.get%页⾯设置Document.PageSetup.TopMargin =60;%上边距60磅Document.PageSetup.BottomMargin =45;%下边距45磅Document.PageSetup.LeftMargin =45;%左边距45磅Document.PageSetup.RightMargin =45;%右边距45磅%查看枚举类型属性VerticalAlignment的属性值Document.PageSetup.set('VerticalAlignment')3. 写⼊⽂字Content接⼝Content接⼝有很多属性和⽅法,可通过Content.get和Content.methodsview命令查看;Start属性⽤来获取或设定⽂字内容的起始位置,End属性⽤来获取或设定⽂字内容的终⽌位置,Text属性⽤来写⼊⽂字内容,Font属性⽤于字体设置,Paragraphs属性⽤于段落设置。
基于MATLABRTW实时仿真系统的设计与研究

未来研究可从以下几个方面展开:
1、研究更为高效的实时仿真算法和求解器,以提高MATLABRTW实时仿真系统 对复杂系统的适应能力;
2、探索MATLABRTW与其他实时仿真平台的集成方法,以实现资源的优势互补;
3、研究MATLABRTW实时仿真系统在故障诊断、优化控制等领域的具体应用案 例,以推动其实用化进程;
二、相关技术综述
MATLABRTW实时仿真系统是一种基于MATLAB和Simulink的实时仿真工具,它 具有高效、灵活、易用等优点,被广泛应用于实时仿真领域。该系统的主要特点 包括:
1、高效的实时仿真能力:MATLABRTW实时仿真系统能够实现对复杂系统的快 速仿真和实时响应,从而大大缩短了开发周期。
2、易用的图形化界面:MATLABRTW提供了直观的图形化界面,使得用户可以 方便地进行系统建模、参数设置和仿真运行等操作。
3、灵活的模型定制能力:MATLABRTW支持多种类型的模型,并提供了丰富的 模型库,用户可以根据实际需求轻松定制模型。
然而,MATLABRTW实时仿真系统也存在一些不足之处,例如实时性受到一定 限制,对于特别复杂的系统可能无法满足实时性要求;同时,该系统的成本较高, 对于一些中小企业可能存在一定的经济压力。
3、实验结果及分析:通过实验仿真,发现MATLABRTW实时仿真系统能够实现 对汽车动力控制系统的精准模拟,且实时性较好。通过对实际数据与仿真数据的 对比分析,发现两者具有良好的一致性,从而验证了MATLABRTW实时仿真系统的 正确性和实时性。
五、结论与展望
本次演示通过对MATLABRTW实时仿真系统的设计与研究,探讨了其实时仿真 的实现方法与过程。通过实验仿真及分析,验证了该系统在实时性和准确性方面 的优势及其在实际应用中的可行性。然而,该系统仍存在一些关键问题需要进一 步研究和改进,例如如何提高实时性以适应更为复杂的系统,以及如何降低成本 以扩大其应用范围等。
Matlab_Simulink模型到C_C_代码的自动实现(1)

Ξ 收稿日期:2006-09-10作者简介:张祥(1977-),女,四川资阳人,硕士研究生,讲师,主要从事智能控制、控制理论与应用研究.【计算机与通信工程】Matlab/Simulink 模型到C/C ++代码的自动实现Ξ张 祥,杨志刚,张彦生(重庆交通大学机电与汽车工程学院,重庆 400074)摘要:介绍了如何利用Matlab/S imulink 的RT W (Real-T ime W orkshop )代码生成工具将S imulink 模型自动转换成C/C ++代码的方法,通过这种方式可以利用S imulink 方便地建立系统模型,同时也解决了S imlink 模型在Matlab/S imulink 环境下速度较慢的问题,大大减少了软件工程师的编程工作量.转换后的C 代码能脱离Matlab 环境独立运行,这进一步扩大用该方法生成的C 代码的适用范围.关 键 词:Matlab/S imulink ,RT W 代码生成工具,C/C ++代码中图分类号:TP311.11 文献标识码:A 文章编号:1671-0924(2006)11-0111-03Automatic R ealization from Matlab/Simulink Models to C/C ++CodeZHANG X iang ,Y ANG Zhi-gang ,ZHANG Y an-sheng(School of E lectromechanics and Autom obile Engineering ,Chongqing Jiaotong University ,Chongqing 400074,China )Abstract :This paper proposes a method of using the RT W (Real-T ime W orkshop )code generation tool to convert Matlab/Simulink to the C/C ++code.Accordingly the system ’s m odel is constructed conveniently by using simulink.This can not only av oid the problem of low simulation speed of the m odel in matlab/Simulink circumstance ,but als o deduce the w orkload of the programming engineer.In addition ,the convert 2ed C code can run independently out of Matlab circumstance ,which expands the use domain of the converted C code by this method.K ey w ords :Matlab/Simulink ;RT W code generation tool ;C/C ++code0 引言 目前,市场对产品的需求呈现多样性、快速性的趋势,这使产品开发面临着多样性需求与快速开发之间的矛盾,并行工程(设计、实现、测试和生产准备同时进行)被提上了日程.其中系统设计软件(S imulink 软件)是用Matlab 语言建立的一种新型的图形建模工具,它免去了程序代码编程带来的低效与繁琐,可以方便地建立系统的模型(例如系统被控对象的模型、控制器模型),通过仿真可以观察到控制算法的性能;而且,如果控制算法不理想,还可以很快地进行反复设计和反复实验,直到找到比较好的控制方案.具体实现时,不需要将设计的控制算法进行编程,可直接把S imulink 建立起来的控制器模型通过RT W 工具转换成可执行代码,下载到存储器中,这样大大减轻了软件工程师的编码工作量,并且将S imulink 模型转换成的C/C ++代码能脱离Matlab 环境独立运行.下面详细介绍如何实现S imulink 模型向C/C ++代码的转换.需要注意的是,要想成功地运行RT W Windows T arget ,则需在电脑上安装M i 2cros oft Visual C ++5.0以上版本的编译器.第20卷 第11期V ol.20 N o.11重 庆 工 学 院 学 报Journal of Chongqing Institute of T echnology2006年11月N ov.20061 Simulink 模型向C/C ++代码转换方法 本文中以电子节气门控制模型throttlectr.mdl 为例,将该模型通过RT W 自动生成C/C ++代码.首先在Matlab 主窗口打开此模型,和Matlab/S imulink 软件环境下仿真不同,将S imulink 模型利用RT W 生成C 代码时,实时仿真需要选择定步长的仿真算法,所以在转换之前应进行相应的设置[1].仿真的控制参数由S imulation/S imulation parameters 菜单项来选择.定步长的仿真算法在该对话框下的S olver op 2tions 栏目选择,如图1所示.图1 定步长仿真算法 RT W 用户界面通过S imulink 提供的仿真参数框“S imulink Parameters”设定,其界面如图2所示.图2 参数设置对话框 应将Real -T ime W orkshop 标签下的Categ ory 选为T ar 2get C on figuration.选择了代码生成方式后还应选择目标代码类型,在图2所示的对话框中,单击System target file 栏对应的Browse 按钮,出现图3所示的对话框,则可以从中选择所期望转换后生成的目标代码类型,这里选择Visual C/C ++Project Makefile only for the “grt ”target.选择图2界面W orkspace I/O页,选中其中的tout 和y out 前的复选框.图3 实时工具目标选择对话框 设置好编译环境后,按下图2中的Build 按钮,这时即可生成S imulinik 模型的C/C ++代码,最终生成下列文件:①throttlectr.c ,是通过目标语言编译器(tornado.tlc )创建的模型的单机C 代码;②throttlectr.h ,是包含状态变量和参数的包含头文件;③throttlectr-data.c ,是对模型中所有用到的参数进行赋值的C 代码.另外还有3个包含模型信息的头文件throttlectr-private.h ,throttlectr-types.h ,rtm odel.h 和一个throttlectr.mak 文件.上述生成的所有文件存储在Matlab 目录下的W ork 文件夹中.需要指出是以上生成的.c 和.h 文件并不能脱离Matlab 独立运行,要将转换后的代码脱离Matlab 独立运行还需要一系列的源文件.将生成的throt 2tlctr.mak 文件在Visual C ++环境下打开,throttlectr.mak 自动调用独立于Matalb 运行所需要的源文件,这些源文件均可在Matlab 中找到.2 Mat 文件的读取 在VC 下运行throttlectr.mak 文件,其运行结果是生成一数据文件———throttlectr.mat 文件.mat 文件是Matlab 系统保存文件的默认文件格式,通过mat 文件可以实现Matlab 与其它编程环境的数据交互,为不同应用程序之间移动matlab 数据提供了一种便利的机制[2-5].在操作mat 文件的子程序中,主要有以下子函数,它们的名字和相应提供的功能说明如下:matopen :打开mat 文件;matclose :关闭mat 文件;matG etDir :取mat 文件中的变量列表;matG etF p :取mat 文件中的C 语言FI LE 句柄;matG etArray :从mat 文件中取一个矩阵;matPutArray :向mat 文件中存一个矩阵;matDeleteArray :从mat 文件中删除一个矩阵;matPutArrayG lobal :向mat 文件中存一个矩阵,使得当用load 命令装入这个mat 文件时,该矩阵对应的变量称为global 变量;matG etArrayHeader :读取mat 文件中的Matlab 矩阵头信息;matG etNextArrayHeader:读取mat 文件中下一个Matlab的矩阵头信息;下面给出一段读取throttlectr.mat 文件的例子,并将读出的数据写入throttlectr.txt 文档中.int main (){int result ;maArray 3p ,3q ;M ATFile 3pm ;int m ,n ,j ;double 3x ,3y ;FI LE 3fOut =NU LL ;211重庆工学院学报const char 3file =“throttlectr.mat ”;fOut =fopen (“throttlectr.txt ”,“a +”);pm =matOpen (file ,“r ”);q =matG etVariable (pm ,“rt-y out ”);p =matG etVariable (pm.“rt-tout ”);m =mxG etM (p );fprintf (fOut ,“the number of rows is %d \n ”,m );n =mxG etN (p );fprintf (fOut ,“the number of column is %d \n ”,n );if (p ==NU LL ){fprintf (fOut ,“Error reading in file %s \n ”,file );return (1);}fprintf (fOut ,“%d \n ”,p );y =mxG etPr (q );x =mxG etPr (p );for (j =0;j <m ;j ++){fprintf (fOut ,“%-5d f \n ”,y[j ]);}return ((result ==0)?EXIT -S UCCESS:EXIT -FAI LURE ):}3 代码验证 在完成了Matlab/S imulink 模型到C/C ++代码的自动转换后,则可将生成的可执行C 代码与S imulink 模型进行性能比较.图4为电子节气门的S imulink 模型———throttlec 2tr.mdl ,运行该模型得到图5所示的结果,在VC 下运行在由S imulink 的RT W 生成的throttlectr.mak 文件,并运行上述给出的读取throttlectr.mat 文件程序,得到图6所示结果.从图5与图6中可以得到两者运行结果几乎是相同的,这说明由S imulink 的RT W 生成的C/C ++代码的正确性,并且由S imulink 模型转换成C/C ++代码的过程中没有进行代码的编辑,从而减轻了用户编写代码的工作量.图4 电子节气门的S imulink模型图5 S imulink模型仿真得到的结果图6 S imulink 模型转换为C 代码程序运行的结果4 结束语 RT W 能够从系统设计的S imulink 模型直接生成面向目标的代码,减少了用户编写代码的工作量;通过一定方式的处理所生成的代码能独立于Matlab 运行,这就可以完成从编译、连接、下载直至运行的整个过程.参考文献:[1] 陈永春.从Matlab/S imulink 模型到代码实现[M].北京:清华大学出版社,2002.[2] 罗桂山,吕庭豪.M AT LAB 与VC ++融合方法的探讨[J ].计算机与数字工程,2004,32(3):19-21.[3] 邹益民.M AT LAB 与C 语言的混合编程[J ].计算机应用,2000(2):51.[4] 董长虹.Matlab 接口技术与应用[M].北京:国防工业出版社,2004.[5] 杨杰.数据采集系统中数据获取和处理的C ++Builder 实现[J ].重庆工学院学报,2005(3):51-55.(责任编辑 刘 舸)311张 祥,等:Matlab/Simulink 模型到C/C ++代码的自动实现。
SimulationWorkbench操作

Model Y2
Model Z
Model Y1
Model X
Execute models
Write outputs
Program Interface
Record/Playback
Data Logger
Operator Interface
Operator
Configure
Start/Stop/Resume
试验回放 图形客户端
RTDB配置 图形客户端
TCP/IP 网络
SIMulation Workbench 提供: MATLAB/Simulink和手工代码模型注入,并行开发和运行多任务、多速率、实时硬件在回路和人在回路仿真的完整框架. 用于仿真所有模型参数和信号的快速、驻留内存实时数据库. 实时控制和/或改变仿真环境变量的控制脚本语言. 高性能数据记录器存储每次试验所有选择的仿真变量. 历史记录数据通过实时数据库进行仿真试验回放. 实时数据观测器显示并绘出所有仿真变量,可以与LabVIEW集成生成定制界面,与Vega Prime软件集成生成视景图象. 强大的用户图形界面用于仿真系统的配置、启动、停止、记录、和再运行功能.
所有的测试脚本程序
所有的用户模型
所有的RTW模型
能够实现将仿真过程中的进程与相应CPU进行绑定, 平衡CPU的负载,为保证仿真的实时性提供了有力的手段
环境变量的建立和编辑
建立RTDB变量
simple
Test for simple
建立RTDB数据库
配置RTDB变量参数
配置生成好的RTDB变量
建立映射
concurrent
特点… 全面的非干扰型工具用于RedHawk、Novell SUSE、或者RedHat Linux上应用程序的开发、监视和调试 应用程序全速运行 观察Linux内核和活动 完整的应用相互作用显示 完整的应用线程和不同CPU的相互作用图像
Matlab代码生成(RTW)
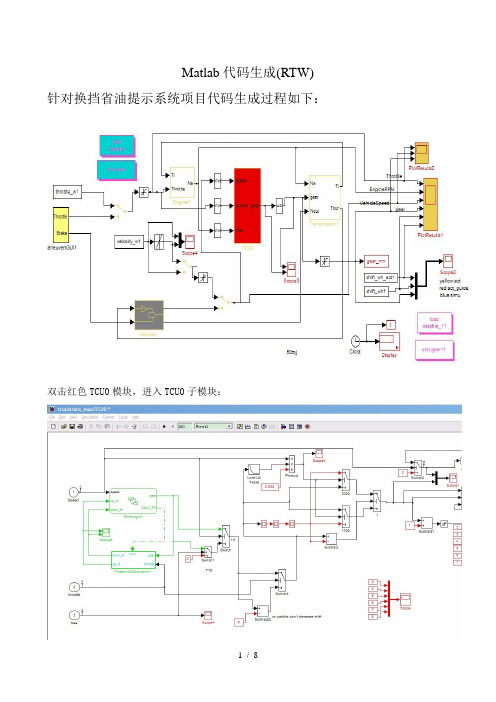
Matlab代码生成(RTW) 针对换挡省油提示系统项目代码生成过程如下:双击红色TCU0模块,进入TCU0子模块:选择Simulation/Configuration Parameters,打开配置参数界面:配置Solver,选择Fixed-step,因为是离散变量操作;解码器Solver选择ode1(Euler),Fixed-step size选择0.004(4ms),与单片机执行周期对应;Tasking mode for periodic sample times:选择SingleTasking配置Hardware Implementation:选择Infineon C16xReal-time Workshop配置:系统目标文件选择ert.tlc;Language:选择C;使能生成文件Generate make command:make_rtw;Template makeReport:配置为全部使能参数配置完成后,然后,主要对TCU模块进行定点数转换,右键TCU模块,选择Fixed-Point/Fixed-Point Advisor选择Run/Run to failure,会自动进行定点数转换检测定点数检测完成后,右键TCU模块,选择Real-Time Workshop/Build Subsystem 点击Build后,会自动生成代码,产生代码生成报告:代码会保存在相应的目录下:双击打开TUC0_ert_rtw,将代码生成的C文件,HEX文件添加到单片机Keil程序中:最后6个文件为matlab代码生成的头文件和C文件。
然后在单片机头文件中,调用一下四个头文件:那么Keil编译是肯定能通过的。
生成代码在程序中调用:首先在初始化程序中,调用TCU0_initialize(0),来完成生成代码的初始化过程。
在主程序中,每次给TCU0_U.Speed(车速),TCU0_U.throttle(油门开度),TCU0_U.Nee (转速)重新赋值,车辆上这三个值可以周期性的通过CAN采集到,然后通过生成代码TCU0_step()计算,便可得出期望档位TCU0_Y.gear,如下:。
信号的MATLAB实现
信号的MATLAB实现一、基本信号的生成MATLAB中提供了多种函数用于生成常用的信号波形,如正弦波、方波、脉冲信号等。
以下是一些常用信号的MATLAB代码示例:1.正弦信号:```MATLABt=0:0.1:10;%时间序列f=1;%频率A=1;%幅值x = A*sin(2*pi*f*t); % 生成正弦信号plot(t, x); % 绘制信号波形```2.方波信号:```MATLABt=0:0.1:10;%时间序列f=1;%频率A=1;%幅值x = A*square(2*pi*f*t); % 生成方波信号plot(t, x); % 绘制信号波形```3.脉冲信号:```MATLABt=0:0.1:10;%时间序列T=1;%脉宽A=1;%幅值x = A*pulstran(t, 0:1:T, 'rectpuls', T); % 生成脉冲信号plot(t, x); % 绘制信号波形```二、时域频域变换对信号进行时域和频域分析是信号处理的重要一环。
MATLAB提供了丰富的函数用于信号的时域频域变换,如傅里叶变换、正弦变换、小波变换等。
以下是一些常用的时域频域变换的MATLAB代码示例:1.傅里叶变换:```MATLABt=0:0.1:10;%时间序列f=1;%频率A=1;%幅值x = A*sin(2*pi*f*t); % 生成正弦信号X = fft(x); % 进行傅里叶变换plot(abs(X)); % 绘制频谱图```2.离散傅里叶变换:```MATLABx=[1,2,3,4];%输入序列X = fft(x); % 进行傅里叶变换plot(abs(X)); % 绘制频谱图```3.小波变换:```MATLABt=0:0.1:10;%时间序列f=1;%频率A=1;%幅值x = A*sin(2*pi*f*t); % 生成正弦信号[c, l] = wavedec(x, 3, 'db4'); % 用db4小波进行3级小波分解plot(c); % 绘制小波系数图```三、滤波滤波是信号处理中常用的操作,用于去除信号中的噪声或部分频率分量。
Matlab代码生成RTW
Matlab 代码生成(RTW)针对换挡省油提示系统项目代码生成过程如下:双击红色TCU0莫块,进入TCU0子模块:选择Simulation/Configuration Parameters, 打开配置参数界面:配置Solver ,选择Fixed-step ,因为是离散变量操作;解码器Fixed-step size 选择0.004 (4mS,与单片机执行周期对应; sample times: 选择SingleTasking配置Hardware Implementation :选择Infineon C16x Solver 选择ode1( Euler ),Tasking mode for periodicReal-time Workshop 配置:系统目标文件选择ert.tlc ; Language:选择C;使能生成文件Generate make command:make_rtw;Template makeReport: 配置为全部使能参数配置完成后,然后,主要对TCU模块进行定点数转换, 右键TCU 模块,选择Fixed-Point/Fixed-Point Advisor选择Run/Run to failure, 会自动进行定点数转换检测定点数检测完成后,右键TCU模块,选择Real-Time Workshop/Build Subsystem 点击Build 后,会自动生成代码,产生代码生成报告:代码会保存在相应的目录下:双击打开TUC0_ert_rtw,将代码生成的C文件,HEX文件添加到单片机Keil程序中:最后6个文件为matlab代码生成的头文件和C文件然后在单片机头文件中,调用一下四个头文件:那么Keil 编译是肯定能通过的生成代码在程序中调用: 首先在初始化程序中,调用TCU0_initialize(0) ,来完成生成代码的初始化过程在主程序中,每次给TCU0_U.Spee(d 车速),TCU0_U.throttle (油门开度),TCU0_U.Nee (转速)重新赋值,车辆上这三个值可以周期性的通过CAN采集到,然后通过生成代码TCUO_step()计算,便可得出期望档位TCUO_Y.gear,如下:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Matlab代码生成(RTW)
针对换挡省油提示系统项目代码生成过程如下:双击红色TCU0模块,进入TCU0子模块:
选择Simulation/Configuration Parameters,打开配置参数界面:
配置Solver,选择Fixed-step,因为是离散变量操作;解码器Solver选择ode1(Euler),Fixed-step size选择0.004(4ms),与单片机执行周期对应;Tasking mode for periodic sample times:选择SingleTasking
配置Hardware Implementation:选择Infineon C16x
Real-time Workshop配置:系统目标文件选择ert.tlc;Language:选择C;使能生成文件Generate make command:make_rtw;Template make
Report:配置为全部使能
参数配置完成后,然后,主要对TCU模块进行定点数转换,右键TCU模块,选择Fixed-Point/Fixed-Point Advisor
选择Run/Run to failure,会自动进行定点数转换检测
定点数检测完成后,右键TCU模块,选择Real-Time Workshop/Build Subsystem 点击Build后,会自动生成代码,产生代码生成报告:
代码会保存在相应的目录下:双击打开TUC0_ert_rtw,
将代码生成的C文件,HEX文件添加到单片机Keil程序中:
最后6个文件为matlab代码生成的头文件和C文件。
然后在单片机头文件中,调用一下四个头文件:
那么Keil编译是肯定能通过的。
生成代码在程序中调用:
首先在初始化程序中,调用TCU0_initialize(0),来完成生成代码的初始化过程。
在主程序中,每次给TCU0_U.Speed(车速),TCU0_U.throttle(油门开度),TCU0_U.Nee (转速)重新赋值,车辆上这三个值可以周期性的通过CAN采集到,然后通过生成代码TCU0_step()计算,便可得出期望档位TCU0_Y.gear,如下:。