机器视觉基础知识-视频信号的分类
视频信号

VGA接口传输的仍然是模拟信号,对于以数字方式生成的显示图像信息,通过数字/模拟转换器转变为R、G、 B三原色信号和行、场同步信号,信号通过电缆传输到显示设备中。对于模拟显示设备,如模拟CRT显示器,信号 被直接送到相应的处理电路,驱动控制显像管生成图像。而对于LCD、DLP等数字显示设备,显示设备中需配置相 应的A/D(模拟/数字)转换器,将模拟信号转变为数字信号。在经过D/A和A/D2次转换后,不可避免地造成了一 些图像细节的损失。VGA接口应用于CRT显示器无可厚非,但用于数字电视之类的显示设备,则转换过程的图像损 失会使显示效果略微下降 。
DVI数字端子比标准VGA端子信号要好,数字接口保证了全部内容采用数字格式传输,保证了主机到监视器的 传输过程中数据的完整性(无干扰信号引入),可以得到更清晰的图像。
显示设备采用DVI接口具有主要有以下两大优点:
1.速度快
DVI传输的是数字信号,数字图像信息不需经过任何转换,就会直接被传送到显示设备上,因此减少了数字 →模拟→数字繁琐的转换过程,大大节省了时间,因此它的速度更快,有效消除拖影现象,而且使用DVI进行数 据传输,信号没有衰减,色彩更纯净,更逼真 。
DVI接口主要用于与具有数字显示输出功能的计算机显卡相连接,显示计算机的RGB信号。DVI(Digital Visual Interface)数字显示接口,是由1998年9月,在Intel开发者论坛上成立的数字显示工作小组 (Digital Display Working Group简称DDWG),所制定的数字显示接口标准。
视频信号处理基本知识
以上就是以彩色视频信号为例,说明其编码和译码的简单过程。
第6页/共44页
4.1.3 图象的颜色模型 4.1.3.1 视角系统对颜色的感知
颜色是视觉系统对可见光的感知结果。可见光是波长在380 nm~780 nm之间 的电磁波,我们看到的大多数光不是一种波长的光,而是由许多不同波长的 光组合成的。研究表明,人的视网膜有对红、绿、蓝颜色敏感程度不同的三 种锥体细胞,另外还有一种在光功率极端低的条件下才起作用的杆状体细胞, 因此颜色只存在于眼睛和大脑。在计算机图像处理中,杆状细胞还没有扮演 什么角色。人的视觉系统对颜色的感知可归纳出如下几个特性: 1、眼睛本质上是一个照相机。人的视网膜(human retina)通过神经元来感知外 部世界的颜色,每个神经元或者是一个对颜色敏感的锥体(cone),或者是一 个对颜色不敏感的杆状体(rod)。 2、红、绿和蓝三种锥体细胞对不同频率的光的感知程度不同,对不同亮度的感 知程度也不同,如图4-03所示。这就意味着,人们可以使用数字图像处理技 术来降低数据率而不使人感到图像质量明显下降。
第9页/共44页
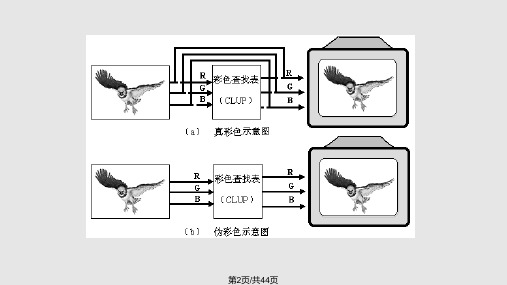
图4-05 彩色显像管产生颜色的原理 颜色=R(红色的百分比)+G(绿色的百分比)+B(蓝色的百分比)
当三基色等量相加时,得到白色;等量的红绿相加而蓝为0值时得到黄色;等量的红 蓝相加而绿为0时得到品红色;等量的绿蓝相加而红为0时得到青色。这些三基色相加的结 果如图4-06所示。
第10页/共44页
传送
D/A变换
R
回放
解
彩
D/A变换
坐 标
G
色 输
变
出
码
D/A变换
换 B设 备
图 4-2-2
视频信号译码过程框图
已压缩的视频信号经解码器进行解压缩,再由D/A变换器恢复亮度和二个色差信号(Y、 U、V)。这三个信号(Y、U、V)经变换可恢复原始的R、G、B三基色信号。R、G、B加到 输出设备上(最常见的输出设备就是电视机、监视器或彩色打印机等)供用户观察。
各种常用视频信号类型大全

视频信号分类介绍 视频信号接口图示:
视频信号分类介绍
BNC 端口:通常用于工作站和同轴电缆连接的连接器,标准 专业视频设备输入、输出端口。BNC电缆有5个连接头用于 接收红、绿、蓝、水平同步和垂直同步信号。BNC接头有别 于普通15针D-SUB标准接头的特殊显示器接口。由R、G 、B三原色信号及行同步、场同步五个独立信号接头组成。 主要用于连接工作站等对扫描频率要求很高的系统。BNC接 头可以隔绝视频输入信号,使信号相互间干扰减少,且信号 频宽较普通D-SUB大,可达到最佳信号响应效果。
视频信号分类介绍 视频信号接口图示:
视频信号分类介绍
标准视频输入(RCA)接口:也称AV 接口,通常都是成对的 白色的音频接口和黄色的视频接口,它通常采用RCA(俗称 莲花头)进行连接,使用时只需要将带莲花头的标准AV 线缆 与相应接口连接起来即可。AV接口实现了音频和视频的分 离传输,这就避免了因为音/视频混合干扰而导致的图像质 量下降,但由于AV 接口传输的仍然是一种亮度/色度(Y/C) 混合的视频信号,仍然需要显示设备对其进行亮/ 色分离和 色度解码才能成像,这种先混合再分离的过程必然会造成色 彩信号的损失,色度信号和亮度信号也会有很大的机会相互 干扰从而影响最终输出的图像质量。AV还具有一定生命力, 但由于它本身Y/C混合这一不可克服的缺点因此无法在一些 追求视觉极限的场合中使用。
视频信号术语简介 隔行扫描 : 隔行扫描指显示屏在显示一幅图像时,先扫描奇数 行,全部完成奇数行扫描后再扫描偶数行,因此每幅图像需扫 描两次才能完成,造成图像显示画面闪烁较大。 因此该种扫 描方式较为落后,通常用在早期的显示产品中。 隔行扫描就是每一帧被分割为两场,每一场包含了一帧中 所有的奇数扫描行或者偶数扫描行,通常是先扫描奇数行得到 第一场,然后扫描偶数行得到第二场。由于视觉暂留效应,人 眼将会看到平滑的运动而不是闪动的半帧半帧的图像。但是这 时会有几乎不会被注意到的闪烁出现,使得人眼容易疲劳。当 屏幕的内容是横条纹时,这种闪烁特别容易被注意到。
机器视觉菜鸟入门基础知识
机器视觉概述
1. 机器视觉系统基本原理 2. 照明光源 3. 镜头 4. 工业摄像机 5. 图像采集/处理卡 6. 图像处理系统
第1章 机器视觉系统基本原理
1.1 机器视觉系统的原理 1.2 机器视觉系统与人的视觉的对比 1.3 机器视觉系统的构成
1.1 机器视觉系统的原理
2.1照明光源
简单视功能原理:人眼视网膜里存在着大量 光敏细胞,按其形状可分为杆状和锥状两 种。杆状光敏细胞的灵敏度极高,主要靠 它在低照度时辨别明暗,但它对彩色是不 敏感的;而锥状细胞既可辨别明暗,也可 辨别彩色。白天的视觉过程主要靠锥状细 胞来完成,夜晚视觉则由杆状细胞起作用。 所以在较暗处无法辨别彩色。
UV镜 雷登镜 增温镜 各色滤镜 带通滤镜
增倍镜 分光镜 棱镜
上海图星电子科技有限公司
第4章 工业摄像机
4. 工业摄像机
按不同芯片类型划分:
CCD摄像机,CCD称为电荷耦合器件,CCD实际 上只是一个把从图像半导体中出来的电子有组织 地储存起来的方法。
CMOS摄像机,CMOS称为“互补金属氧化物半 导体”,CMOS实际上只是将晶体管放在硅块上 的技术,没有更多的含义。CMOS可以将光敏元 件、放大器、A/D转换器、存储器、数字信号处 理器和计算机接口控制电路集成在一块硅片上, 具有结构简单、处理功能多、速度快、耗电低、 成本低等特点。
3. 镜头-有关镜头的基本概念
3. 镜头-有关镜头的基本概念
焦距(F): 视场角: 物距: 像距: 光圈:一般用口径系数f表示,指镜头口径与焦距之比,f/2.8即指
1:2.8 景深(DOF):在焦点前后各有一个容许弥散圆,这两个弥散圆之间
的距离就叫景深,即:在被摄主体(对焦点)前后,其影像仍然有一段 清晰范围的,就是景深。 分辨力:指能分清楚物体的能力,单位LP/mm(Line pairs/Milimeter) 快门,决定曝光时间 数值孔径,Numerical Aperture (NA) 基本放大倍数(光学放大倍数),Primary Magnification (PMAG) 调制传递函数(MTF),MTF好的镜头有利于低对比度景物的再现, 拍出的图像层次丰富、细节明显、质感细腻。 畸变:也叫失真
机器视觉基础知识(PDF)
机器视觉中的图像采集技术硬件基础知识
一、镜头基本概念(7)
镜头的调制传递函数MTF
第一节 工业镜头
机器视觉中的图像采集技术硬件基础知识
一、镜头基本概念(8)
镜头的调制传递函数MTF
第一节 工业镜头
机器视觉中的图像采集技术硬件基础知识
第一节 工业镜头
一、镜头基本概念(9)
镜头的调制传递函数MTF
机器视觉中的图像采集技术硬件基础知识
第一节 工业镜头
一、镜头基本概念(4)
镜头接口 – C-MOUNT 镜头的标准接口之一,镜头的接口螺纹参数: 公称直径:1“ 螺距:32牙 – CS-Mount是C-Mount的一个变种,区别仅仅在于 镜头定位面到图像传感器光敏面的距离的不同,C- Mount 是17。5mm,CS-Mount是12。5mm。 – C/CS能够匹配的最大的图像传感器的尺寸不超过1“。
一、镜头基本概念(10)
系统的调制传递函数MTF
第一节 工业镜头
机器视觉中的图像采集技术硬件基础知识
第一节 工业镜头
二、镜头的分类(1)
按照等效焦距分为 广角镜头
等效焦距小于标准镜头(等效焦距为50mm)的镜头。特点 是最小工作距离短,景深大,视角大。常常表现为桶形畸变。 中焦距镜头 焦距介于广角镜头和长焦镜头之间的镜头。通常情况下畸变 校正较好。 长焦距镜头 等效焦距超过200mm的镜头。工作距离长,放大比大,畸变 常常表现为枕形状畸变。
像素速率(Pixel Rate)
相机每秒中能够输出像素的个数,仅仅对于数字相机有意 义。
机器视觉中的图像采集技术硬件基础知识
第二节 工业相机
一、工业相机的基本概念(5)
卷帘快门(Rolling Shutter)
视频信号基础知识

1 模拟视频
■
1.4视频信号的主要参数
■主要包括水平清晰度、垂直清晰度、带宽、宽高比、 场频和帧频。
■水平清晰度 一般指视频图像在水平方向上的最小显像单元,用 “线”来表示。 ■垂直清晰度 眼睛可分辨的水平线数目。一般只有575行为正程, 有76%的有效区,垂直清晰度约为437线。
1 模拟视频
■
• 行消隐脉冲:截止行扫描逆程电子束 的脉冲 称为行消隐脉冲;
• 场消隐脉: 截止场扫描逆程电子束 的脉冲称为场消隐脉冲;
•
基于视频信号的图像定位技术
5.7μs
1.6μs 12μs
行同步信号
消隐脉冲与复合同步脉冲
消隐脉冲:
扫描逆程期间电子束消隐——扫描逆程期间让信号 电平为黑电平,电子束截止,屏幕为黑色,起到消 隐逆程光栅痕迹的作用。
行消隐信号(或称行消隐脉冲) —— 行逆程12μs,则行消隐脉冲脉宽为12μs,电平为黑
电平
• 场消隐信号(或称场消隐脉冲) —— 场逆程1.6ms,则场消隐脉冲脉宽为1.6ms,电平为
1 模拟视频
■
1.1模拟黑白视频
■视频形成原理:每一张35 mm胶片均为 静止图片,在相邻两张图片中只有很小 的动作变化,每秒中变换24张图片,利 用人眼的视觉暂留特性,以达到播放活 动图像的效果。 ■特点:整幅画面扫描呈现
图像的顺序传送
a bcd e f g h i j
1 2 3 4 5 6 7 8 9 10
t
622. 623. 624. 625. 1. 2. 3. 4. 5. … 22. 23. 24.
前均衡脉冲 场同步脉冲 后均衡脉冲
行 同 步脉 冲
齿脉冲
行 消 隐脉 冲
机器视觉的分类
机器视觉的分类机器视觉(Computer Vision)是一门研究如何使计算机能够“看”的学科,旨在使计算机模仿人类视觉系统的功能和能力。
它通过利用图像和视频数据来识别、分析和理解现实世界中的视觉信息。
机器视觉技术已经被广泛应用于各个领域,包括自动驾驶、安防监控、医疗诊断等。
在机器视觉领域中,有多种不同的分类方法,本文将对其中几种常见的分类方法进行介绍。
1. 基于任务的分类根据机器视觉所处理的任务类型,可以将其分为以下几类:1.1 图像分类(Image Classification)图像分类是指将图像分为不同的类别或标签。
这是最常见的机器视觉任务之一。
通常情况下,图像分类算法会通过训练一个模型来学习从输入图像到输出标签之间的映射关系。
该模型可以通过深度学习方法(如卷积神经网络)来实现。
1.2 目标检测(Object Detection)目标检测是指在图像或视频中定位和识别特定目标物体。
与图像分类不同,目标检测需要确定目标的位置和边界框。
常见的目标检测算法包括基于特征的方法(如Haar特征和HOG特征)和基于深度学习的方法(如Faster R-CNN、YOLO等)。
1.3 语义分割(Semantic Segmentation)语义分割是指将图像划分为若干个语义上有意义的区域。
与目标检测不同,语义分割要求对每个像素进行分类,即像素级别的分类。
这在许多应用中非常有用,例如自动驾驶中道路和障碍物的识别。
1.4 实例分割(Instance Segmentation)实例分割是指在图像或视频中同时识别和定位多个对象实例,并为每个实例生成一个唯一的分割掩码。
与语义分割相比,实例分割不仅要求对图像进行像素级别的分类,还需要对不同对象实例进行区分。
1.5 姿态估计(Pose Estimation)姿态估计是指从图像或视频中推断出人体或物体的姿态信息,包括关节位置、角度等。
姿态估计在许多领域中都有应用,如动作识别、虚拟现实等。
视觉信号的分类

视觉信号的分类视觉信号是一种通过光线传递的信息,它是人类感知世界的主要方式之一。
视觉信号的分类可以根据其来源、形式和用途来进行。
从来源来看,视觉信号可以分为自然视觉信号和人工视觉信号。
自然视觉信号是人眼直接接收到的来自自然界的光线信号,如太阳光、月光等。
人工视觉信号是经过人为处理或创造的用于传递信息的光线信号,如电视信号、计算机屏幕显示等。
从形式来看,视觉信号可以分为连续信号和离散信号。
连续信号是在时间和空间上都是连续变化的信号,如自然景物的光线反射形成的连续图像。
离散信号是在时间或空间上有间隔的信号,如数字相机采集到的图像像素值。
从用途来看,视觉信号可以分为感知信号和传输信号。
感知信号是用于人类感知和理解外界事物的信号,如人眼接收到的光线信号传递给大脑进行图像信息的处理和认知。
传输信号是用于将图像或视频信号传递给其他设备或人进行观看或处理的信号,如电视信号传输到电视机上显示出图像。
除了这些主要分类外,视觉信号还可以根据其频率、颜色、亮度等特征进行进一步的细化。
频率是光信号波动的速度,决定了图像的细节程度。
颜色是光信号的不同波长和频率所表现出的视觉效果,是物体表面反射或发射的光线在人眼中所呈现出的不同感受。
亮度是光信号的强度,决定了图像的明暗程度。
视觉信号在现代社会中发挥着重要的作用。
人们通过视觉信号来获取信息、交流思想和美化环境。
广告行业利用视觉信号来吸引消费者注意,设计行业利用视觉信号来传达产品的特点和设计理念。
在科学研究中,视觉信号也被广泛应用于医学图像诊断、机器视觉和人工智能等领域。
然而,不同的视觉信号也存在一些挑战和限制。
自然视觉信号受到环境因素的影响,如光线强度、反射物体的颜色和材质等。
人工视觉信号在传输过程中可能遭受干扰和损失,导致图像质量下降。
此外,视觉信号的处理和分析需要复杂的算法和设备支持,这对于技术水平较低或资源匮乏的地区可能存在困难。
总之,视觉信号是一种重要的信息传递方式,它可以根据来源、形式和用途进行分类。
视频信号基础知识(三)VGA视频信号

视频信号基础知识(三)VGA视频信号1. VGA显示原理VGA(Video Graphics Array)作为一种标准的显示接口得到了广泛的应用。
VGA在任何时刻都必须工作在某一显示模式下,其显示模式分为字符显示模式和图形显示模式,而在应用中讨论的都是图形显示模式。
VGA的图形模式分为三类:CGA,EGA兼容的图形模式;标准VGA图形模式;VGA扩展图形模式,后两种图形模式统称为VGA图形模式。
文中基于标准VGA模式来实现。
工业标准的VGA显示模式为:640×480×16×60。
常见的彩色显示器一般由阴极射线管(CRT)构成,彩色由GRB(Green Red Blue)基色组成。
显示采用逐行扫描的方式解决,阴极射线枪发出电子束打在涂有荧光粉的荧光屏上,产生GRB基色,合成一个彩色像素。
扫描从屏幕的左上方开始,从左到右,从上到下,逐行扫描,每扫完一行,电子束回到屏幕的左边下一行的起始位置,在这期间,CRT、对电子束进行消隐,每行结束时,用行同步信号进行行同步;扫描完所有行,用场同步信号进行场同步,并使扫描回到屏幕的左上方,同时进行场消隐,并预备进行下一次的扫描。
VGA显示控制器控制 CRT显示图象的过程如图1所示。
2. VGA信号时序图2所示是计算机VGA(640×480,60 Hz)图像格式的信号时序图。
图2中,V_sync为场同步信号,场周期TVSYNC=16.683 ms,每场有525行,其中480行为有效显示行,45行为场消隐期。
场同步信号Vs中每场有1个脉冲,该脉冲的低电平宽度tWV=63μs(2行)。
场消隐期包括场同步时间tWH、场消隐前肩tHV(13行)、场消隐后肩tVH(30行),共45行。
行周期THSYNC=31.78μs,每显示行包括 800点。
其中,640点为有效显示区,160点为行消隐期(非显示区)。
行同步信号Hs中每行有一个脉冲,该脉冲的低电平宽度tWV=3.81 μs(即96个DCK);行消隐期包括行同步时间tWH,行消隐前肩tHC(19个DCLK)和行消隐后肩tCH(45个DCLK),共160个点时钟。
机器视觉应用的分类

机器视觉应用的分类机器视觉是人工智能领域中的一个重要分支,它通过模仿人类视觉系统的方式,让机器能够“看”和理解图像或视频。
机器视觉应用广泛,可以分为以下几个分类。
一、图像分类图像分类是机器视觉应用中最基本的任务之一。
它的目标是将输入的图像分为不同的类别。
图像分类可以应用于很多领域,比如医学影像分析、智能交通、安防监控等。
在医学影像领域,可以用图像分类技术对X光、MRI等影像进行自动识别和分析,帮助医生做出准确的诊断。
二、目标检测目标检测是指在图像或视频中定位和识别特定的目标。
与图像分类不同,目标检测不仅需要确定图像中是否存在目标,还要准确定位目标的位置。
目标检测在智能监控、自动驾驶等领域有着广泛的应用。
比如在自动驾驶中,通过目标检测可以及时发现并识别路上的车辆、行人等障碍物,以确保行驶的安全。
三、目标跟踪目标跟踪是指在连续的图像或视频序列中追踪特定目标的运动轨迹。
目标跟踪在视频监控、智能交通等领域有着广泛的应用。
比如在视频监控中,可以通过目标跟踪技术实时追踪可疑行为,提供安全保护。
四、图像分割图像分割是将图像分成若干个子区域的过程,每个子区域可以表示图像中的一个目标或物体。
图像分割在医学影像分析、图像编辑等领域有着广泛的应用。
比如在医学影像中,可以通过图像分割技术将肿瘤从正常组织中分离出来,提供更准确的诊断结果。
五、姿态估计姿态估计是指从图像或视频中估计出人体或物体的姿态信息。
姿态估计在虚拟现实、运动捕捉等领域有着广泛的应用。
比如在虚拟现实中,通过姿态估计技术可以实时追踪用户的动作,实现更真实的交互体验。
六、人脸识别人脸识别是指通过图像或视频中的人脸特征进行身份验证或辨认的过程。
人脸识别在安防监控、人脸支付等领域有着广泛的应用。
比如在安防监控中,可以通过人脸识别技术实现对特定人员的自动识别和报警。
七、图像生成图像生成是指使用机器学习或深度学习模型生成新的图像。
图像生成在图像编辑、游戏开发等领域有着广泛的应用。
机器视觉的基础知识培训

1、机器视觉的相关概念
1.1.机器视觉的定义:
机器视觉是指利用相机、摄像机等传感器,配合机器视觉算法赋予智 能设备人眼的功能,从而进行物体的识别、检测、测量等功能。
机器 (Machine)
视觉 (Vision)
机械
运动
控制
视(硬件)
觉(软件)
机器视觉就是用机 器代替人眼来做测 量和判断
功能目标
主要解决需要人眼进行工件的定位、测 赋予智能机器人视觉、实现对于外界位
量、检测等重复性劳动
置信息、图像信息的识别与判断
硬件需求
要求较高、需要对工业相机的帧频、分 除特殊情况,大部分对于相机或摄像头
辨率等指标依据需求筛选
的要求并不高
算法需求 往往侧重于精确度的提高
更加复杂,侧重于采用数学逻辑或深度 学习进行物体的标定与识别
3、机器视觉系统基本构成
典型系统由以下组成: • 待测目标 • 光源 • 镜头 • 相机 • 图像采集卡 • 图像处理软件 • 输入输出板卡 • 工业电脑
“嵌入”
4、机器视觉系统应用分类
作为一种给机器人带来视觉功能的关键技术,机器视觉应用广泛。从工业视觉到计 算机视觉,从人机交互到自动驾驶,从虚拟现实到物体自动识别,机器视觉都能担 当着重要角色。
4.4.识别: ➢ 识别:读码
4、机器视觉系统应用分类
4.4.识别: ➢ 识别:读码
4、机器视觉系统应用分类
4.4.识别: ➢ 识别:颜色
5、机器视觉系统软、硬件
5.1.相机:
• 相机分类 按芯片技术:CCD相机和CMOS相机 按靶面类型:面阵相机和线阵相机 按输出模式:模拟相机和数字相机 按颜色:彩色相机和黑白相机 按是否带处理器:智能相机和非智能相机
学习机器视觉的基础知识和技能

学习机器视觉的基础知识和技能第一章:机器视觉简介机器视觉是研究如何使计算机能够“看”的一门学科。
它利用计算机视觉、模式识别和图像处理等技术,将图像或视频信号转化为可理解的数据并进行分析。
机器视觉被广泛应用于自动驾驶、智能安防、医学影像分析等领域。
1.1 机器视觉的发展历程机器视觉的发展可以追溯到上世纪60年代,当时国际上的研究者开始尝试将图像转化为数字信号进行处理和分析。
随着计算机硬件和算法的不断进步,机器视觉的应用范围也不断扩大。
1.2 机器视觉的基本原理机器视觉的基本原理是通过图像采集设备获取图像,然后通过图像处理算法对图像进行分析和处理,最后得到所需的信息。
图像采集设备可以是相机、摄像机等,图像处理算法可以包括边缘检测、图像分割、特征提取等。
第二章:机器视觉的关键技术机器视觉的关键技术包括图像预处理、目标检测、目标跟踪和目标识别等。
2.1 图像预处理图像预处理是指对图像进行去噪、平滑、增强等操作,以便更好地进行分析和处理。
常用的图像预处理方法包括灰度化、降噪、直方图均衡化等。
2.2 目标检测目标检测是指在图像或视频中自动识别和定位感兴趣的目标物体。
常用的目标检测方法包括滑动窗口、卷积神经网络等。
2.3 目标跟踪目标跟踪是指在视频序列中追踪一个或多个运动目标的位置。
常用的目标跟踪方法包括卡尔曼滤波、相关滤波等。
2.4 目标识别目标识别是指识别图像中的对象属于哪一类别。
常用的目标识别方法包括支持向量机、深度学习等。
第三章:机器视觉的应用领域机器视觉的应用领域非常广泛,涉及到工业自动化、智能交通、智能安防、医学影像等多个领域。
3.1 工业自动化机器视觉在工业自动化中扮演着重要角色,可以用于产品质量检测、物体定位等。
例如,可以通过机器视觉系统检测产品表面缺陷、尺寸偏差等问题,提高生产效率和产品质量。
3.2 智能交通机器视觉在智能交通领域的应用非常广泛。
通过图像识别技术,可以实现交通监控、车辆自动驾驶等功能。
完整版机器视觉与视觉检测知识点归纳
完整版机器视觉与视觉检测知识点归纳机器视觉是一门研究如何让机器像人一样进行视觉感知和理解的领域。
视觉检测是机器视觉的一个重要分支,主要研究如何从图像或视频中检测出感兴趣的目标物体或特征。
以下是机器视觉与视觉检测的一些重要知识点的归纳:1.图像处理基础:了解数字图像的表示和处理方法,包括灰度图和彩色图的表示、像素操作、滤波器、图像增强等。
2.特征提取:通过特定的算法从图像中提取有用的特征,如边缘、角点、纹理等。
常用的特征提取方法有SIFT、SURF、HOG等。
3. 物体检测:在图像中定位和识别出感兴趣的物体。
常用的物体检测算法有Haar特征和级联分类器、基于深度学习的目标检测方法(如RCNN、YOLO、SSD等)。
4. 目标跟踪:在视频序列中实时跟踪目标的位置和形状变化。
常用的目标跟踪算法有卡尔曼滤波器、粒子滤波器、基于深度学习的跟踪方法(如Siamese网络、MOT等)。
5.三维重建:从多个图像或视频中恢复出场景的三维结构和姿态。
常用的三维重建方法有多视图几何、结构光、RGB-D相机等。
8.视觉SLAM:实时融合视觉感知和定位的技术,用于机器人导航、增强现实等领域。
常用的视觉SLAM系统有ORB-SLAM、LSD-SLAM等。
9.深度学习:利用多层次的神经网络来实现图像识别、目标检测等任务。
深度学习在机器视觉领域已经取得了很大的突破,如基于卷积神经网络(CNN)的图像识别、目标检测和分割等。
10. 数据集和评估:机器视觉和视觉检测的研究都需要大量的数据集进行算法训练和验证。
常用的数据集有ImageNet、COCO、PASCAL VOC等。
评估指标如准确率、召回率、精确率、平均精度均值(mAP)等。
11.实际应用:机器视觉和视觉检测在很多领域有广泛的应用,如智能监控、自动驾驶、工业自动化、医学图像分析、无人机等。
总结起来,机器视觉和视觉检测涵盖了图像处理、模式识别、机器学习、深度学习等多个领域的知识和技术。
视频信号基础知识
1.1信号的基础知识1.1.1模拟RGB信号(ARGB)1.1.1.1 定义RGB模拟基色视频信号是具有相同带宽,经过伽马校正的红、绿、蓝原色信号。
信号中包含同步脉冲信号和行场消隐信号。
R、G、B信号同步产生并携带同时生成的图像信息。
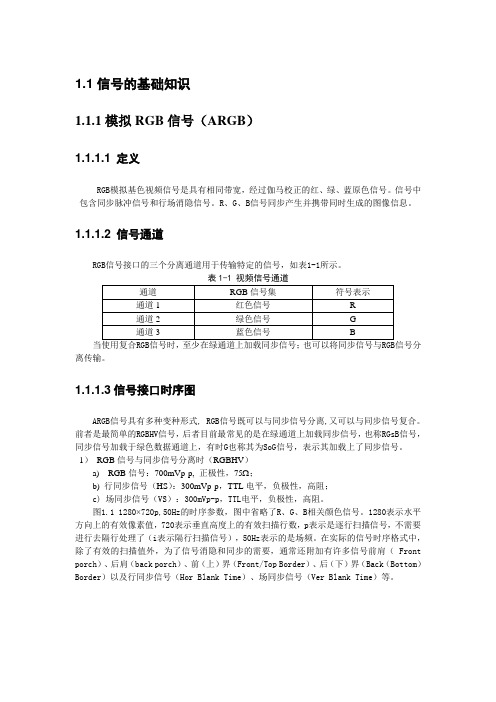
1.1.1.2 信号通道RGB信号接口的三个分离通道用于传输特定的信号,如表1-1所示。
表1-1 视频信号通道当使用复合RGB信号时,至少在绿通道上加载同步信号;也可以将同步信号与RGB信号分离传输。
1.1.1.3信号接口时序图ARGB信号具有多种变种形式, RGB信号既可以与同步信号分离,又可以与同步信号复合。
前者是最简单的RGBHV信号,后者目前最常见的是在绿通道上加载同步信号,也称RGsB信号,同步信号加载于绿色数据通道上,有时G也称其为SoG信号,表示其加载上了同步信号。
1)RGB信号与同步信号分离时(RGBHV)a) RGB信号:700mVp-p, 正极性,75 ;b) 行同步信号(HS):300mVp-p,TTL电平,负极性,高阻;c) 场同步信号(VS):300mVp-p,TTL电平,负极性,高阻。
图1.1 1280×720p,50Hz的时序参数,图中省略了R、G、B相关颜色信号。
1280表示水平方向上的有效像素值,720表示垂直高度上的有效扫描行数,p表示是逐行扫描信号,不需要进行去隔行处理了(i表示隔行扫描信号),50Hz表示的是场频。
在实际的信号时序格式中,除了有效的扫描值外,为了信号消隐和同步的需要,通常还附加有许多信号前肩( Front porch)、后肩(back porch)、前(上)界(Front/Top Border)、后(下)界(Back(Bottom)Border)以及行同步信号(Hor Blank Time)、场同步信号(Ver Blank Time)等。
图1.1 1280×720p,50Hz的时序参数(分离同步信号)图片来自参考文献12)RGB信号与同步信号复合时(通常在绿通道上加载同步信号):a) 复合同步信号其波形见图1.2;b) RGB信号:700mVp-p,正极性,75 ;c) 复合同步信号:±300mV。
机器视觉培训教程第二讲1

1
2
2
3
3
4
4
5
5
6
第二讲:机器视觉中的图像采集技术硬件基础知识
四、相机的基本概念:
异步触发(Reset&Restart):通常情况下相机是不间断地拍照的-- 无的放矢。当CCD相机处于异步触发方式时,相机并不是以固定时钟连 续扫描和输出连续信号。而是在收到一个触发信号后,再开始扫描输出 新的一帧信号。
CCD的基本工作原理是,当然光子撞击到硅原子上时,会产生 自由电子。再将这些自由电子收集在一起形成信号。
感光单元 (CCD Pixcel)
工作原理
第二讲:机器视觉中的图像采集技术硬件基础知识
六、相机基本成像原理:
CCD的电荷存储器,能够存储一定量的电子。将电子释放出来 之后所形成的电流,便可以量化地代表感光面上某点的明暗信息。
显微镜头 物体成像与物体物理大小相对比率。如1:1、1:2镜头。
远心镜头 无畸变镜头
第二讲:机器视觉中的图像采集技术硬件基础知识
三、镜头的成像原理及各参数间关系:
光圈
(相当于水龙头开 关,开得越大,所
需时间越短)
光线 (相当于水)
工作距离
(距离越远,所需 时间越长)
光线强度
(相当于水压,水 压越大,所需时间
四、相机的基本概念:
CCD传感器的灵敏度: 上面是一个典型的CCD图像传感器对于不同光谱的响应
曲线。
第二讲:机器视觉中的图像采集技术硬件基础知识
四、相机的基本概念:
• 信号格式 模拟图象信号的格式包括:复合视频信号,Y/C分离信号,RGB分量信 号。绝大多数周边设备都能够兼容这些信号格式。通常情况下对于彩色 视频信号,Y/C分离传输的方式优于复合视频传输的方式,RGB分量传 输的方式又优于Y/C分离传输方式。
各种常用视频信号类型大全

✓视频信号术语简介
NTSC制式:又简称为N制,是1952年12月由美国国家电视标准 委员会(National Television System Committee,缩写为 NTSC)制定的彩色电视广播标准,两大主要分支是NTSC-J 与NTSC-US(又名NTSC-U/C)。 它属于同时制,帧频为每秒29.97fps,扫描线为525,逐行 扫描,画面比例为4:3,分辨率为720x480。 这种制式的色度信号调制包括了平衡调制和正交调制两种 ,解决了彩色黑白电视广播兼容问题,但存在相位容易失真 、色彩不太稳定的缺点。
✓视频信号分类介绍 视频信号接口图示:
✓ 视频信号分类介绍 ✓ 视频信号术语简介 视频格式简介 视频测试评测
✓视频信号术语简介
视频信号术语常见的有标清、高清、全高清、PAL制、 NTSC制 、 SECAM制 、隔行扫描、逐行扫描、行频和场频、带宽、 行场同步、 Dual Link和single Link 、Dual Link.
✓视频信号分类介绍 视频信号接口图示:
54 321
10 9 8 7 6 15 14 13 12 11
✓视频信号分类介绍
DVI输入接口:DVI接口主要用于与具有数字显示输出功能的 计算机显卡相连接,显示计算机的RGB信号。DVI(Digital Visual Interface)数字显示接口,是由1998年9月,在Intel 开发者论坛上成立的数字显示工作小组(Digital Display Working Group简称DDWG),所制定的数字显示接口标准 。 DVI数字端子比标准VGA端子信号要好,数字接口保证了 全部内容采用数字格式传输,保证了主机到监视器的传输过 程中数据的完整性(无干扰信号引入),可以得到更清晰的 图像。
机器视觉基本概念

机器视觉基本概念
机器视觉是指利用计算机和各种传感器技术来实现对图像、视频或其他视觉数据的理解和处理的一种技术。
它包括图像采集、图像处理、图像分析和图像理解等环节。
1. 图像采集
图像采集是机器视觉的第一步,它通过各种传感器设备获取周围物体的外观信息并将其转化为数字信号,以供后面的图像处理、分析和理解。
传感器设备包括摄像头、激光雷达、红外线传感器等。
2. 图像处理
图像处理是机器视觉中非常重要的一个步骤,它对采集到的图像进行预处理,以消除噪声、增强图像质量,并进行图像增强、特征提取等操作。
常用的图像处理技术包括灰度化处理、滤波器、图像分割、形态学处理和边缘检测等。
3. 图像分析
图像分析是机器视觉中较为复杂的环节,它利用处理后的图像和模式识别技术进行分析和识别,以提取出物体的特征和表征。
常用的图像分析技术包括特征提取、目标检测和分类、形状和运动分析等。
总之,机器视觉技术已经在日常生活和工业生产中得到了广泛应用。
例如,在无人驾驶、安防监控、医疗影像、机器人制造等方面使用了机器视觉技术。
未来,随着机器视觉技术的不断发展,人工智能和机器学习等新技术的出现,机器视觉将在更广泛的领域中发挥更加重要的作用。