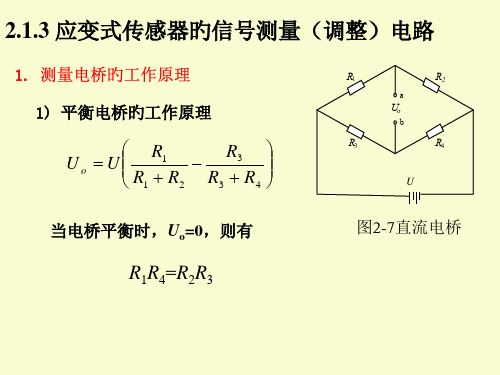
应变式传感器
应变式压力传感器的原理及应用
应变式压力传感器的原理及应用
一、应变式压力传感器的工作原理
应变式压力传感器是通过应变测量物体受力大小的一种传感器。
其工作原理是:在物体内部或表面放置应变片,当外部施加压力时,应变片就会发生形变并沿着其敏感方向产生感应电阻的变化。
传感器接收感应电阻的信号,并将其转化为电信号输出。
因此,当外界的压力改变时,应变感应电阻的值也随之改变,进而实现对压力变化的检测与测量。
二、应变式压力传感器在电子秤中的应用
电子秤是应变式压力传感器的主要应用领域之一。
在电子秤中,传感器被安装在秤盘下面,在物品放在秤盘上时,其所承受的重力会被传感器感知并转化为电信号,进而计算出物品的重量。
目前,市面上电子秤的类型繁多,其中最为流行的是称重范围较小(数百克至数千克)的电子秤。
这类秤采用应变式压力传感器作为其核心部件,具有灵敏度高、精度高、反应迅速的特点。
同时,由于应变式压应力传感器具有结构简单,易于维护等优点,因此在电子秤中的应用也较为广泛。
应变式传感器
R l A R l A
ε为导体的纵向应变,其数值一般很小,常以微应变度量;
μ为电阻丝材料的泊松比,一般金属μ=0.3-0.5; R 1 2 K 0 R
2.1.2 金属应变片的主要特性
(一)灵敏系数
(二)横向效应
(三)温度误差及其补 偿
2.2.4 压阻式加速度传感器
• 它的悬臂梁直接用单晶硅制成,四个扩散电阻 扩散在其根部两面 。
扩散电阻
基座
a
质量块 应变梁
2.2.5 测量桥路及温度补偿
• 由于制造、温度影响等原因,电桥存在失调、零位温 漂、灵敏度温度系数和非线性等问题,影响传感器的 准确性。 • 减少与补偿误差措施
1. 恒流源供电电桥
R1 I1 I2 USR R2
USC R3 R4
←
图2-14 恒流源电桥
输出电压为:
R1 R4 R2 R3 U 0 I1 R1 I 2 R3 I R1 R2 R3 R4
若电桥初始平衡,且R =R2 =R3=R4=R,当第一桥臂电阻R1 变 为R1+ΔR1 时,电桥输出电压为:
工作原理:
膜片两边存在压力差时,膜片产生变形,膜片上各点产生应力。 四个电阻在应力作用下,阻值发生变化,电桥失去平衡, 输出相应的电压,电压与膜片两边的压力差成正比。
四个电阻的配置位置:
按膜片上径向应力σr和切向应力σt的分布情况确定。
3p r 2 [(1 )r02 (3 )r 2 ] 8h 3p t 2 [(1 )r02 (1 3 )r 2 ] 8h
RR 1 1 U0 I IR R 4R R 4 1 4R 1 若满足ΔR1<<R1 ,则 U 0 IR U 0 4
应变式传感器
E x
电阻应变片的工作原理
—轴向应力
E x
—纵向压阻系数,(40~80) 10-11m 2 / N
E —电阻丝材料弹性模量,1.67 1011 N / m 2
E 66 ~ 133
R 所以 E x R
特点:比金属 丝式灵敏度高, 输出电流大, 但非线性严重, 温度稳定性较 差。
电阻应变式传感器是基于测量物体受力变形所产生应变 的一种传感器,最常用的传感元件为电阻应变片。
电阻式传感器
两大常用类型
应变式传感器是基于测量导体或者半导体受力变形所产生应变 而导致电阻变化的一类传感器,最常用的传感元件为电阻应变 片。 其中半导体的应变效应又称为半导体的压阻效应。 基于半导体压阻效应的电阻式传感器是现代固态压力,加速度 等力学传感器的基础。
应变片的布置与桥接方式
R1、R3串接,R2、R4串接并置 于相对臂,减小弯矩影响;横 向贴片作温度补偿。
应变片的布置与桥接方式
电阻应变式传感器的特点和应用
电阻应变式传感器特点: ①精度高,测量范围广; ②使用寿命长,性能稳定可靠; ③结构简单,体积小,重量轻; ④频率响应较好,既可用于静态测量又可用于动态测量; ⑤价格低廉,品种多样,便于选择和大量使用。
电阻应变片的静态特性
应变极限
应变计的线性(灵敏系数为常数)特性,只有 在一定的应变限度范围内才能保持。当试件输 入的真实应变超过某一极限值时,应变计的输 出特性将呈现非线性。在恒温条件下,使非线 性误差达到10%时的真实应变值,称为应变极限。
6. 绝缘电阻和最大工作电流 电阻应变片的静态特性
绝缘电阻和最大工作电流
电阻应变片的基本结构
应变式力传感器原理
应变式力传感器原理
应变式力传感器利用材料的弹性变形特性来测量力的大小。
其工作原理如下:
1. 工作原理简述:
应变式力传感器由弹性材料制成,通常是金属或合金材料。
当外部施加力作用于传感器时,传感器内部的弹性材料会发生变形,而该变形会导致材料内部的应变产生变化。
2. 弹性材料的工作原理:
弹性材料具有弹性恢复能力,即当外力去除后能够恢复到初始状态。
在施加力之前,弹性材料的晶体结构处于初始状态,其晶体格子之间的距离是稳定的。
而当外力作用于材料时,晶格结构会发生略微的变化,晶体格子之间的距离会发生微小的变化。
3. 应变的产生:
当外力作用于弹性材料时,晶格结构的微小变化会导致材料内部产生应变。
应变是指单位长度的变形量,通常用应变率(单位长度的变形比例)来表示。
弹性材料的应变率与外力的大小成正比。
4. 电桥测量原理:
为了测量应变的变化,应变式力传感器通常采用了电桥测量原理。
电桥由四个电阻组成,其中一个电阻位于弹性材料上。
当材料受到外力作用时,其内部的应变发生变化,导致电阻值发生微小变化。
这会导致电桥的输出电压发生变化,从而可以通
过测量输出电压的变化来确定外界施加的力的大小。
总结:
应变式力传感器通过利用弹性材料的应变特性,测量外界施加的力的大小。
其工作原理主要包括弹性材料的应变产生和电桥测量原理。
通过测量电桥输出电压的变化,可以确定外界施加的力的大小。
应变式传感器的分类
应变式传感器的分类
应变式传感器是一种常见的物理量传感器,可以通过测量应变来检测各种物理量,如力、压力、重量等。
根据不同的分类标准,应变式传感器有多种分类方式:
1. 根据用途分类:应变式传感器可以用于测量力、压力、重量等物理量,因此可以根据其用途分为测力传感器、称重传感器、压力传感器等。
2. 根据结构形式分类:应变式传感器可以根据其结构形式分为平膜片式、平行梁式、柱式、桥式、悬臂梁式、双梁式、轮辐式、压力环式、板环式等。
3. 根据敏感元件分类:应变式传感器主要由敏感元件和转换元件组成,因此也可以根据敏感元件的材料和结构分为金属电阻应变片和半导体应变片。
4. 根据测量范围分类:应变式传感器可以用于测量各种物理量,其测量范围也各不相同,因此可以根据测量范围分为微应变传感器和大量程传感器。
5. 根据输出信号分类:应变式传感器可以根据其输出信号的类型分为模拟输出和数字输出两种类型。
总之,应变式传感器的分类方式多种多样,可以根据不同的需求和标准进行选择。
应变式传感器的工作原理
应变式传感器的工作原理
应变式传感器是利用电阻应变片将应变转换为电阻变化的传感器,传感器由在弹性元件(感知应变)上粘贴电阻应变敏感元件(将应变转换为电阻变化)构成。
当被测物理量作用在弹性元件上时,弹性元件的变形引起敏感元件的阻值变化,通过转换电路将其转变成电量输出,电量变化的大小反映了被测物理量的大小。
应变式传感器可以测量应变应力、弯矩、扭矩、加速度、位移等物理量。
应变是物体在外部压力或拉力作用下发生变形的现象,当外力去除后物体又能完全恢复其原来的尺寸和形状的应变称为弹性应变,具有弹性应变特性的物体称为弹性元件。
电阻应变片的工作原理是基于应变效应,即在导体产生机械变形时,它的电阻值相应发生变化。
传感器:第2章应变式传感器
如果电桥各臂都改变,则有
Ug
E
(R1 R1)(R4 R4 ) (R2 R2 )(R3 R3) (R1 R1 R2 R2 )(R3 R3 R4 R4 )
(一)等臂电桥
当 R1 R2 R3 R4 时,称为等臂电桥。此时
Ug
E
R(R1 R2 R3 R4 ) R1R4 R2R3 (2R R1 R2 )(2R R3 R4 )
应变式传感器包括两部份,一是弹性敏感元件,将被 测量转换为应变;二是应变片,将应变转化为电阻 的变化。
被测量
应变量
弹性元件
电阻
应变片
变化
(一)柱式压力传感器 圆柱式压力传感器分为实心和空心两种。
柱式力传感器应变片的粘贴方式
对于柱式压力传感器其轴向应变和圆周方向应变与轴 向受力成正比例关系。
轴向应变
下面分析横向效应产生的原因。设轴向应变为 , 横向应变为 r。
2006.9.11 JC204->
若敏感栅有 n 个纵栅,每根长为 l ,圆弧横栅的半
径为 r ,在轴向应变 作用下,全部纵栅的形
变 L1 nl 。
在半圆弧上取一小微元 dl rd ,上面的应变为
1 2
(
r )
1 2
(
r ) cos 2
一、压阻效应 单晶硅材料在受到应力后,其电阻率发生明显的变化,
这种现象被称为压阻效应。 对于一条形的半导体材料,其电阻变化与应变的关系
d ( r 2 ) r2
2 dr r
2 r
根据泊松效应,有
r 上式中 为泊松系数。
由实验结果有
通常 C 1
d C dV V
由于 V S l
dV V
dS S
第3章应变式传感器
(c)当试件材料变化时,只需要调整1和2的长度。
23
3.4 测量电路
一.测量电路的作用、组成及分类 1.作用 (1)转化功能:把电阻的变化转化成电压或电流的变化。 (2)放大功能:机械应变一般很小,对应的电阻变化也很小, 就需要放大。 2. 组成 (1)转化功能对应转化电路,由电桥电路实现。 (2)放大功能对应放大电路,由集成运放实现。 本节只讨论转化电路。 3. 电桥电路的分类 根据电源的不同可分为:直流电桥和交流电桥。
说明:
E
(a)当R1和RB变化较小时,A可看成常数。
(b)当R1和RB变化较大时,A可看成常数会带来非线性误差(参 见3.4节)。
20
U 0 A( R1R4 RB R3 )
④补偿电路的工作原理 (a)试件无应变 t=t0时, 令R1=RB=R3=R4=R0 , 则 Uo=A(R1R4-RBR3)=0 t=t0+△t时, ΔRt1=ΔRtB=ΔRt,R1=RB=R0+ΔRt,则 Uo=0 (b)试件存在应变ε R1存在电阻变化:△R1′=KεR0 t=t0时, RB=R3=R4=R0,R1=R0+△R1′=R0+KεR0 则 Uo=AR02K ε∝ ε t=t0+△t时, R1=R0+ KεR0 +ΔRt,RB=R0+ΔRt, 则 Uo=AR02Kε∝ ε 结论:经过线路补偿,输出只与ε成正比,而与t无关。
17
自身因素引起的电阻相对变化:ΔRt /R0=α0Δt 外界因素引起的电阻相对变化: ΔRβ/R0= K0 (βg-βs)Δt
(3)总的温度误差 总电阻相对变化量:
Rt R R R0 R0 R0
[ 0 K 0 ( g s )]t
应变式传感器
(1)差动电桥
B R1+R1
+
R2-R2
A
C
Uo
R3
R4
-
D
B
R1+R1
+
R2-R2
A
C
Uo
R3-R3 D
R4+R4
-
E
E
(a)
(b)
图2-9 差动电桥
半桥差动:在试件上安装两个工作应变片,一种受拉应变,一种受 压应变, 接入电桥相邻桥臂。
Uo
U R1
R1 R1 R1 R2 R2
R3 R3 R4
Uo
U R1
R1 R1 R1 R2 R2
R3
R3 R3 R3 R4 R4
若ΔR1=ΔR2=ΔR3=ΔR4 , R1=R2=R3=R4,则得
Uo
U
R1 R1
R R
B R R
A
C
Uo
R R R R D
U
可知:Uo 与ΔR1/R1成线性关系,无非线性误差,而且电 桥电压敏捷度Su=U,是单臂工作时旳4倍。
U R 1
Uo
4
R1
1
R1 2R1
U
' 0
U 4
R1 R1
U Su 4
应用:根据上式,假如已知应变,就能够求出输出电压;反之依然。
2.非线性误差及其补偿措施
实际情况(保存分母中旳ΔR1/R1项):
n R1
U0
U
1 n
R1 R1 R1
(1
n)
若n=1:
理想情况(略去分母中旳ΔR1/R1项):
/
2)
2
内贴取“+”
式中: h——圆环厚度; b——圆环宽度; E——材料弹性模量。
应变式传感器
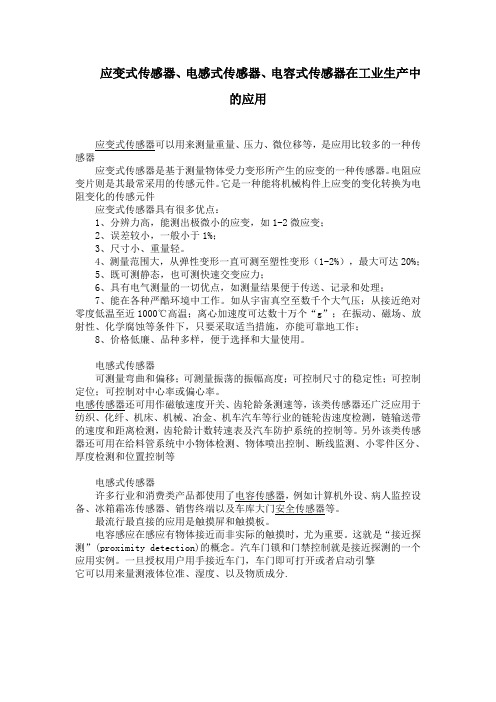
应变式传感器、电感式传感器、电容式传感器在工业生产中的应用应变式传感器可以用来测量重量、压力、微位移等,是应用比较多的一种传感器应变式传感器是基于测量物体受力变形所产生的应变的一种传感器。
电阻应变片则是其最常采用的传感元件。
它是一种能将机械构件上应变的变化转换为电阻变化的传感元件应变式传感器具有很多优点:1、分辨力高,能测出极微小的应变,如1-2微应变;2、误差较小,一般小于1%;3、尺寸小、重量轻。
4、测量范围大,从弹性变形一直可测至塑性变形(1-2%),最大可达20%;5、既可测静态,也可测快速交变应力;6、具有电气测量的一切优点,如测量结果便于传送、记录和处理;7、能在各种严酷环境中工作。
如从宇宙真空至数千个大气压;从接近绝对零度低温至近1000℃高温;离心加速度可达数十万个“g”;在振动、磁场、放射性、化学腐蚀等条件下,只要采取适当措施,亦能可靠地工作;8、价格低廉、品种多样,便于选择和大量使用。
电感式传感器可测量弯曲和偏移;可测量振荡的振幅高度;可控制尺寸的稳定性;可控制定位;可控制对中心率或偏心率。
电感传感器还可用作磁敏速度开关、齿轮龄条测速等,该类传感器还广泛应用于纺织、化纤、机床、机械、冶金、机车汽车等行业的链轮齿速度检测,链输送带的速度和距离检测,齿轮龄计数转速表及汽车防护系统的控制等。
另外该类传感器还可用在给料管系统中小物体检测、物体喷出控制、断线监测、小零件区分、厚度检测和位置控制等电感式传感器许多行业和消费类产品都使用了电容传感器,例如计算机外设、病人监控设备、冰箱霜冻传感器、销售终端以及车库大门安全传感器等。
最流行最直接的应用是触摸屏和触摸板。
电容感应在感应有物体接近而非实际的触摸时,尤为重要。
这就是“接近探测”(proximity detection)的概念。
汽车门锁和门禁控制就是接近探测的一个应用实例。
一旦授权用户用手接近车门,车门即可打开或者启动引擎它可以用来量测液体位准、湿度、以及物质成分.。
应变式传感器工作原理
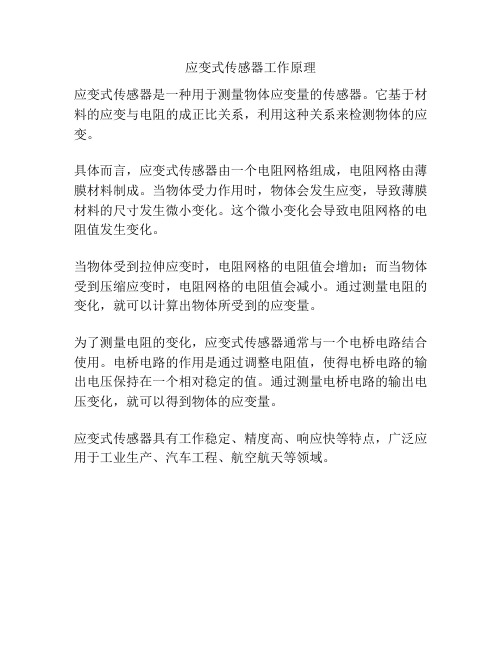
应变式传感器工作原理
应变式传感器是一种用于测量物体应变量的传感器。
它基于材料的应变与电阻的成正比关系,利用这种关系来检测物体的应变。
具体而言,应变式传感器由一个电阻网格组成,电阻网格由薄膜材料制成。
当物体受力作用时,物体会发生应变,导致薄膜材料的尺寸发生微小变化。
这个微小变化会导致电阻网格的电阻值发生变化。
当物体受到拉伸应变时,电阻网格的电阻值会增加;而当物体受到压缩应变时,电阻网格的电阻值会减小。
通过测量电阻的变化,就可以计算出物体所受到的应变量。
为了测量电阻的变化,应变式传感器通常与一个电桥电路结合使用。
电桥电路的作用是通过调整电阻值,使得电桥电路的输出电压保持在一个相对稳定的值。
通过测量电桥电路的输出电压变化,就可以得到物体的应变量。
应变式传感器具有工作稳定、精度高、响应快等特点,广泛应用于工业生产、汽车工程、航空航天等领域。
第2节 应变式传感器

实际使用, 实际使用,多采用等臂电桥或对称电桥
用法一: 用法一:等臂电桥
当R1=R2=R3=R4=R时: 时
R(∆R1 − ∆R2 − ∆R3 + ∆R4 ) + ∆R1∆R4 − ∆R2∆R3 Ug = E (2R + ∆R1 + ∆R2 )(2R + ∆R3 + ∆R4 )
R>>∆Ri,则:
E ∆R1 ∆R2 ∆R3 ∆R4 EK (ε1 −ε2 −ε3 + ε4 ) Ug = − − + = R R R 4 4 R
纸(不能太厚),一般为(0.02 ~ 0.04)mm。 不能太厚),一般为( ),一般为 ) 。 基底长:基底的全长,基底宽: 基底长:基底的全长,基底宽:基底宽度
3. 粘结剂
有机
聚丙烯酸酯 酚醛树脂 有机硅树脂 聚酰亚胺 磷酸盐 硅酸 硼酸盐
无机
4.引线 引线
直径( 镀锡铜线,要求电阻率低、 直径(0.1-0.15)mm 镀锡铜线,要求电阻率低、电阻温度系数 ) 抗氧化,易于焊接。 小,抗氧化,易于焊接。
∆R ∆L 2nl + (n − 1)πr (n − 1)πr = KS = K Sε + KSε r R L 2L 2L
令:
(n −1)πr Ky = KS 2L
则横向系数: 则横向系数:
H=
Ky Kx
(n − 1)πr = 2nl + (n − 1)πr
3.机械滞后 机械滞后
应变片粘贴在被测试件上,当温度恒定时, 应变片粘贴在被测试件上,当温度恒定时,其加载特 性与卸载特性不重合,其差值即为机械滞后。 性与卸载特性不重合,其差值即为机械滞后。 指 示 应 卸载 变 ∆ε εr
应变式传感器分析

电阻值大
可以加大应变片承受电压, 输出信号大, 敏感栅尺寸也增大
返回
上一页
下一页
(一)灵敏系数
k R / R
“标称灵敏系数”:受轴向单向力(拉或压),试件材料 为泊松系数μ=0.285的钢等。一批产品中只能抽样5%的 产品来测定,取平均值及允许公差值。
2.1 应变式传感器
2.1.1 工作原理 2.1.2 金 属 应 变 片
的主要特性 2.1.3 测量电路 2.1.4 应 变 式 传 感
器应用
返回
第2章 应变式传感器 概述
传感器原理及应用
电阻式应变传感器作为测力的主要传感器,测 力范围小到肌肉纤维,大到登月火箭,精确度可到 0.01—0.1%。有拉压式(柱、筒、环元件)、弯曲 式、剪切式。
优点:应变灵敏系数大,允许电流密度大,工 作范围广,易实现工业化生产
问题:难控制电阻与温度和时间的变化关系
返回
上一页
电阻应变式传感器结构X
下一页
2.1.2 金属应变片的主要特性
(一)灵敏系数 (二)横向效应 (三)温度误差及其补
偿
返回
上一页
下一页
应变片的电阻值 R
应变片在未经安装也不受外力情况下, 于室温下测得的电阻值
式中: Rt——温度为 t ℃时的电阻值; R0——温度为t 0℃时的电阻值; α——金属丝的电阻温度系数; Δt——温度变化值, Δt=t -t0。
当温度变化Δt时, 电阻丝电阻的变化值为 ΔRt=Rt- R0= R0αΔt (1)
2) 试件材料和电阻丝材料的线膨胀系数的影响
应变式传感器特征: ➢不同材料类型:金属应变片、半导体应变片 ➢应用范围:应变力、压力、转矩、位移、加速度; ➢主要优点:使用简单、精度高、范围大体积小。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
采用等臂电桥,即R1= R2= R3=R4=R ,可得:
R(R1 R2 R3 R4 ) R1R4 R2 R3 U0 U (2 R R1 R2 )(2R R3 R4 )
当ΔRi<< R ( i=1,2,3,4) 时,略去上式中的高阶微量,则
1
减小非线性误差 采用的措施:
(1)半桥差动电桥
R1+ΔR1 R2+ΔR2 U0 R3 U R4
R(R1 R2 ) U0 U (2 R R1 R2 )2 R
R1
F
R2
上表面应变片受拉应力,下表明应变片受压应力,有:
U R U 0= ΔR1=ΔR, ΔR2=-ΔR 2 R 严格的线性关系
lT 2 lT 2 l0 l0 g T
lT lT 2 lT1 l0 (g s )T
T
lT l0 ( g s )T
RT R0 K0T R0 K0 (g
金属材料:k0以前者为主,则k0≈1+2μ=1.7~3.6
半 导 体:k0值主要是由电阻率相对变化所决定
应变片的结构与种类 • 金属丝式 • 金属箔式
• 金属薄膜式
(1)金属丝式应变片
金属电阻丝应变片的基本结构 1-基底 2-敏感栅 3-覆盖层 4-引出线
(2)金属箔式应变片
在绝缘基底上,将厚度为0.001~0.01mm电阻箔材,利
原因 粘结层传递变形失真 还存在有横向效应
(2)横向效应
敏感栅是由多条直线和圆弧部分组成 直线段:沿轴向拉应变εx,电阻 圆弧段:沿轴向压应度εy 电阻 εy K εy
εx
(3)温度误差及其补偿
① 敏感栅电阻随温度的变化引起的误差 当环境温度变化△T 时,敏感栅材料电阻温度系
数为 ,则引起的电阻变化为
在低频(10~60Hz)振动测量中得到广泛的应用, 但不适用于频率较高的振动和冲击。
End the 2.1
用照相制板或光刻腐蚀的方法,制成各种需要的形状
优点:尺寸准确;粘结性能好;散热条件好;灵敏度
提高;横向效应小;蠕变、机械滞后小,疲劳寿命长。
箔 式 应 变 片
(3)金属薄膜应变片
采用真空蒸发或真空沉积等方法在薄的绝缘基片上
形成厚度在0.1μm以下的金属电阻材料薄膜敏感栅, 再加上保护层。 优点:应变灵敏系数大,工作范围广,易实现工业 化生产
R1 R4 R2 R3 U0 U ( R1 R2 )(R3 R4 )
应变片工作时,其电阻变化ΔR
( R1 R1 )(R4 R4 ) ( R2 R2 )(R3 R3 ) U0 U ( R1 R1 R2 R2 )(R3 R3 R4 R4 )
加应变为零或相互抵消,这种应变片称为温度自
补偿应变片 。利用这种应变片来实现温度补偿
的方法称为应变片自补偿法。
• a. 选择式自补偿应变片
• b. 双金属敏感栅自补偿应变片
a.选择式自补偿应变片
实现温度补偿的条件为:温度引起的虚假应变为零,即,
t
t
K0
( g s )t 0
K URt
Rt
U = Ui - URt
K
2.1 应变式传感器
2.1.1 工作原理
2.1.2 金属应变片的主要特性
2.1.3 测量电路 2.1.4 应变式传感器应用
2.1.3 电阻应变片的测量电路
(1) 直流电桥
C R1
R2
U0
R3
D
U
R4
不平衡直流电桥的工作原理及灵敏度
电桥后面接放大器, 电桥输出端看成开路。电 桥的输出式为:
U R1 R2 R3 R4 U0 4 R R R R
UK 1 2 3 4 U0 4
输出电压公式表明:
① ΔRi<< R时,电桥的输出电压与应变成线性关系。 ② 若相邻两桥臂的应变极性一致,即同为拉应变或压应变时, 输出电压为两者之差;若相邻两桥臂的应变极性不同,则输 出电压为两者之和。 ③ 若相对两桥臂应变的极性一致,输出电压为两者之和;反 之则为两者之差。 ④ 电桥供电电压U越高,输出电压U0越大。但是,当U大时, 电阻应变片通过的电流也大,若超过电阻应变片所允许通过 的最大工作电流,传感器就会出现蠕变和零漂。 ⑤ 增大电阻应变片的灵敏系数K,可提高电桥的输出电压。
问题:难控制电阻与温度和时间的变化关系
2.1 应变式传感器
2.1.1 工作原理
2.1.2 金属应变片的主要特性
2.1.3 测量电路 2.1.4 应变式传感器应用
2.1.2 金属应变片的主要特性 (1)灵敏系数
k
R / R
标称灵敏系数——出厂时测定该批产品的平均灵敏系数值。
电阻应变片的灵敏系数k < 电阻丝的灵敏系数k0
R (1 2 E ) R
ε为导体的纵向应变; μ为电阻丝材料的泊松比,一般金属μ=0.3~0.5; λ为压阻系数;σ为应力值;E为材料的弹性模量;
金属电阻的灵敏系数
k0
R R
1 2 E
k0
1 2 材料的几何尺寸变化引起的
E
材料的电阻率ρ随应变引起的(压阻效应)
U0 A[(R1 R1t )R4 (RB RBt )R3 ] 0
温度变化+应变
F R1 Rb F
U0 A[(R1 R1t R1 )R4 (RB RBt )R3 ] 0
AR1R4 K
② 应变片的自补偿法
• 使用一种特殊应变片,当温度变化时,产生的附
电阻应变效应:当金属丝在外力作用下发生机械变 形时,其电阻值将发生变化。
电阻丝阻值:
l R= S
Δl、ΔS、Δρ ΔR
F
R l S R l S
对于半径为r的圆导体,S=πr2,ΔS/S=2Δr/r
又由材料力学可知,在弹性范围内,
l / l , r / r , / E
当被测试件的线膨胀系数βg已知时,通过选择敏感栅 材料,使下式成立
K 0 ( g s )
即可达到温度自补偿的目的。
b. 双金属敏感栅自补偿应变片
敏感栅丝由两种不同温度系数的金属丝串接组成 选用两者具有不同符号的电阻温度系数 调整R1和R2的比例,使温度变化时产生的 电阻变化满足 (R1 ) t (R2 ) t
RT RT R0 R0T
其中
RT R0 (1 T )
T T T0
② 试件材料的线膨胀引起的误差
当温度变化△ T 时,因试件材料( G )和敏感栅材料 ( S )的线膨胀系数不同,应变片将产生附加拉长 (或压缩),引起的电阻相对变化 。
lT 1 lT1 l0 l0 s T
(2)非线性误差及其补偿
单臂电桥,即R1桥臂变化ΔR,理想的线性关系
U R U 4 R
' 0
R U R 1 R 实际输出电压 U 0 U 1 4R 2R 4 R 2 R
1
电桥的相对非线性误差为
U0 1 R 1 R 1 1 R ' 1 1 1 K 1 1 2 R 2 R 2 U0 2 R
RT RT RT R0T R0 K0 (g s )T
相应的虚假应变为
RT / R0 T T ( g s )T K0 K0
温度补偿 ① 电桥补偿法
R1 U0 Rb
U0 A( R1R4 RB R3 )
仅温度变化
R3 U R4
电桥灵敏度比单臂时提高一倍 温度补偿作用
(2)全桥差动电路
R1+ΔR R2-ΔR
U0
输出电压为:
U0 U
R3-ΔR U
R4+ΔR
R
R
2.1 应变式传感器
2.1.1 工作原理
2.1.2 金属应变片的主要特性
2.1.3 测量电路
2.1.4 应变式传感器应用
2.1.4 电阻应变式传感器的应用
• 应变式力传感器
2.1 应变式传感器
2.1.1 工作原理
2.1.2 金属应变片的主要特性
2.1.3 测量电路 2.1.4 应变式传感器应用
1. 电子秤,体重秤,汽车衡的
测量原理是?
2. 测量一座桥梁的承重情况该
如何实现?
3. 如何测量炮弹发射时炮膛承
受的压力大小,并根据此压力
值来确定合理的钢管厚度?
2.1.1 工作原理
• 应变式压力传感器 • 应变式液体重量(或液位)传感器
• 应变式加速度传感器
梁式力传感器
F
h
l0 l
悬臂梁
双端固定梁
容器内液体重量(液位)传感器
P gh
F PS
P——容器内感压膜处压强; S——柱形容器的截面积。
应变式加速度传感器
应变式加速度传感器结构示意图 1—等强度梁 2—质量块 3—壳体 4—电阻应变片
R1 R2
2 K 2 ( g 2 ) R2t / R2 R1 R2 R1t / R1 1 K1 ( g 1 )
组合自补偿法
通过调节两种敏感栅的长度来控制应变 片的温度自补偿,可达±0.45μm/℃的高 精度
③热敏电阻补偿
R5 分流电阻
T
R1+ΔR R2 Rt Ui R3 U0 R4