机电传动控制课后习题答案《第五版》
机电传动控制(第五版)课后习题答案解析全集
考试题型
1、填空题(20分,每空1分或2分)
1、他励直流电动机的制动方法有( ( )。 )、( )、
UN U N nN n0 Ke N U N I N Ra
220 1500 n0 1559 (r / min) 220 34.4 0.242
PN 6.5 TN 9550 9550 40.5( N m) nN 1500
3.10 一台他励直流电动机的技术数据如下:PN=6.5kW, UN=220V,IN=34.4A,nN=1500r/min,Ra=0.242 Ω,试计算出此 电动机的如下特性: ⑵ 电枢附加电阻分别为3 Ω和5 Ω 时的人为机械特性
5、阅读分析题(20-25分,每题10分)
(10分)说明图1是什么控制电路,并分析其工作原理。
基本在第八章
6、设计题(10-25分)
试设计一条自动运输线,该运输线上有两台电动机(1M和
2M),1M拖动运输机,2M拖动卸料机,该系统需要满足以
下条件: (1)1M先启动后,才允许2M启动; (2)2M 先停止,经一段时间后1M 才自动停止,2M还可单 独停止;
发生变化?
U E I a Ra E K EΦ n T KTΦ I a
T Kt I a TL 常数 Ia均不变。
E会变化。
Ra U n T 2 Ke Ke Kt
n会变化。
***3.4一台他励直流电动机在稳定运行时,电枢反电势E=E1,如 负载转矩TL=常数,外加电压和电枢电路中的电阻均不变,问减 弱励磁使转速上升到新的稳定值后,电枢反电势将如何变化?是 大于、小于还是等于E1?
机电传动控制第五版课后答案

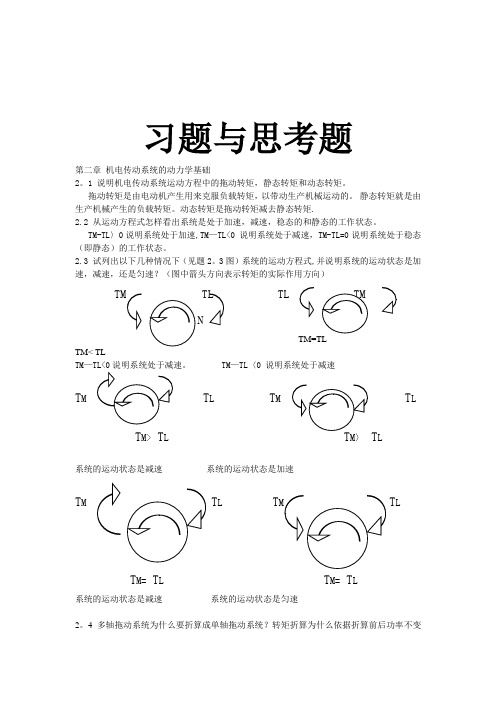
习题与思考题第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TMTLTM=TL TM< TLTM-TL>0说明系统处于加速。
TM-TL<0 说明系统处于减速TM TMTM> TL TM> TL系统的运动状态是减速系统的运动状态是加速TM TMTM= TL TM= TL系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
2.6为什么机电传动系统中低速轴的GD2逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
《机电传动控制》第五版课后习题答案

第3章直流电机的工作原理及特性习题3.1 为什么直流电机的转子要用表面有绝缘层的硅钢片叠压而成?答案:直流电动机工作时,(1)电枢绕组中流过交变电流,它产生的磁通当然是交变的。
这个(2)变化的磁通在铁芯中产生感应电流。
铁芯中产生的感应电流,在(3)垂直于磁通方向的平面内环流,所以叫涡流。
涡流损耗会使铁芯发热。
为了减小这种涡流损耗,电枢铁芯采用彼此绝缘的硅钢片叠压而成,使涡流在狭长形的回路中,通过较小的截面,以(4)增大涡流通路上的电阻,从而起到(5)减小涡流的作用。
如果没有绝缘层,会使整个电枢铁芯成为一体,涡流将增大,使铁芯发热。
因此,如果没有绝缘,就起不到削减涡流的作用。
习题3.4 一台他励直流电动机在稳态下运行时,电枢反电势E =E1,如负载转矩TL =常数,外加电压和电枢电路中的电阻均不变,问减弱励磁使转速上升到新的稳定值后,电枢反电势将如何变化?是大于、小于还是等于E1?答案:∵当电动机再次达到稳定状态后,输出转矩仍等于负载转矩,即输出转矩T =T L =常200aae e ae m ae m e e R U n I K K R U n E K n T K I n n n K K K U T K =Φ=−ΦΦ=∴=Φ−Φ∴−∆=Φ=ΦQ Q 又当T=0a aU E I R =+数。
又根据公式(3.2), T =K t ФI a 。
∵励磁磁通Ф减小,T 、K t 不变。
∴电枢电流I a 增大。
再根据公式(3.11),U =E +I a ·R a 。
∴E=U -I a ·R a 。
又∵U 、R a 不变,I a 增大。
∴E 减小即减弱励磁到达稳定后,电动机反电势将小于E 1。
习题3.8 一台他励直流电动机的铭牌数据为:P N =5.5KW ,U N =110V ,I N =62A ,n N =1000r/min ,试绘出它的固有机械特性曲线。
(1)第一步,求出n 0 (2)第二步,求出(T N ,n N )答案:根据公式(3.15),(1-1)Ra =(0.50~0.75)(N N N I U P −1)NN I U我们取Ra =0.7(N N N I U P −1)NN I U, 计算可得,Ra =0.24 Ω 再根据公式(3.16)得,(1-2) Ke ФN =(U N -I N Ra )/n N =0.095 又根据(1-3) n 0=U N /(Ke ФN ),计算可得,n 0=1158 r/min 根据公式(3.17),(2-1) T N =9.55NNn P , 计算可得,T N =52.525 N ·M 根据上述参数,绘制电动机固有机械特性曲线如下:3.10一台他励直流电动机的技术数据如下:P N =6.5KW ,U N =220V , IN=34.4A , n N =1500r/min , R a =0.242Ω,试计算出此电动机的如下特性:①固有机械特性;②电枢附加电阻分别为3Ω和5Ω时的人为机械特性;③电枢电压为U N /2时的人为机械特性; ④磁通φ=0.8φN 时的人为机械特性;并绘出上述特性的图形。
机电传动控制课后习题答案《第五版》
习题与思考题第二章机电传动系统的动力学基础2。
1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩.2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL〉0说明系统处于加速,TM—TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2。
3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM=TLTM< TLTM—TL<0说明系统处于减速。
TM—TL〈0 说明系统处于减速T M T L T M T LT M> T L M〉L系统的运动状态是减速系统的运动状态是加速T M T L T T LT M= T L T M= T L系统的运动状态是减速系统的运动状态是匀速2。
4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速.这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置.所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω,p不变.转动惯量折算前后动能不变原则是能量守恒MV=0。
5Jω22.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小.2.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
机电传动控制课后习题答案《第五版》

----习题与思考题第二章机电传动系统的动力学基础2.1说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0 说明系统处于加速, TM-TL<0 说明系统处于减速, TM-TL=0 说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题 2.3 图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM TL TL TMNTM=TLTM< TLTM-TL<0 说明系统处于减速。
TM-TL<0说明系统处于减速T M T L T M T L T M>T L T M> T L系统的运动状态是减速系统的运动状态是加速T M T L T M T LT M= T L T M=T L系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变----的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω , p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5J ω22.5 为什么低速轴转矩大,高速轴转矩小?因为 P= Tω,P 不变ω越小 T 越大,ω越大 T越小。
2.6 为什么机电传动系统中低速轴的GD2比高速轴的 GD2大得多 ?因为 P=Tω,T=G?D 2/375. P=ω G?D2 /375. ,P 不变转速越小 GD 2越大,转速越大 GD2越小。
机电传动控制(第五版)课后习题答案
2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.6为什么机电传动系统中低速轴的G D2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
2.7 如图2.3(a)所示,电动机轴上的转动惯量J M=2.5kgm2,转速n M=900r/min; 中间传动轴的转动惯量J L=16kgm2,转速n L=60 r/min。
试求折算到电动机轴上的等效专惯量。
折算到电动机轴上的等效转动惯量:j=Nm/N1=900/300=3,j1=Nm/Nl=15J=JM+J1/j2+ JL/j12=2.5+2/9+16/225=2.79kgm2. 2.8如图2.3(b)所示,电动机转速n M=950 r/min,齿轮减速箱的传动比J1= J2=4,卷筒直径D=0.24m,滑轮的减速比J3=2,起重负荷力 F=100N,电动机的费轮转距GD2M=1.05N m2, 齿轮,滑轮和卷筒总的传动效率为0.83。
机电传动控制课后习题答案第五版

习题与思考题第二章机电传动系统的动力学基础说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状 ^态。
TM-TL>0说明系统处于加速,TM-TLvO说明系统处于减速,TM-TL=O说明系统处于稳态(即静态)的工作状态。
试列出以下几种情况下(见题图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方TM TL TL TMTM=TLTM< TLTM-TLvO 说明系统处于减速。
TM-TLvO说明系统处于减速T TT T LTTT T LMMLT TT T LM=M=L系统的运动状态是匀速系统的运动状态是减速多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算 前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原 则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗 杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后M>M>是减速TTTT L L MM系统的运动状态是加速功率不变的原则2MV=O不变。
转动惯量折算前后动能不变原则是能量守恒是P=T® , p为什么低速轴转矩大,高速轴转矩小?因为P= T w ,P不变3越小T越大,3越大T越小。
GDGD?22大得多比高速轴的为什么机电传动系统中低速轴的222越大,转GD不变T=G?D w/375. P=G?D 转速越小/375. ,P 因为P=T3,2越小。
速越大GDJ=,转速n=900r/min; 如图(a)所示,电动机轴上的转动惯量中间传动轴M M2, 转速n=16kgmJ=60r/min 。
机电传动控制课后习题答案第五版

机电传动控制课后习题答案第五版Last updated at 10:00 am on 25th December 2020习题与思考题第二章机电传动系统的动力学基础说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
试列出以下几种情况下(见题图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速(图中箭头方向表示转矩的实际作用方向)TM=TL TM< TLTM-TL<0说明系统处于减速。
TM-TL<0 说明系统处于减速TM> TL TM> TL系统的运动状态是减速系统的运动状态是加速TM= TL TM= TL系统的运动状态是减速系统的运动状态是匀速多轴拖动系统为什么要折算成单轴拖动系统转矩折算为什么依据折算前后功率不变的原则转动惯量折算为什么依据折算前后动能不变的原则因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=ω2为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多因为P=Tω,T=G?D2/375. P=ωG?D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
机电传动控制(第五版)课后习题答案全集
自动往复运动控制电路
SB1 KMR STa KMF NhomakorabeaFR
SBF
KMF STb
KMR
SBR
关键措施
KMR 限位开关 采用复合式开 关。正向运行 停车的同时,自动起动反向 运行;反之亦然。
KMF
电机
STb
STa
(4)程序控制
8.16 要求三台电动机1M、2M、3M按一定顺序启动:即1M 启动后,2M才能启动; 2M启动后,3M才能启动;停产时 则同时停。试设计此控制线路。
正反转控制线路
L1 S
L2 L3
FU
KM
FR M 3~ KM2 R2 KM1 R1
串电阻启动
S FU
KM1 KM2
FR
KM2
多速电机
M 3~
KM2
控制回路
2.星形-三角形换接起动控制
S FU SB3 KM 1 FR V1 W 1 U1 M KM 3 3~ V2 KM 2 W2 U2 SB1 KM 1 KM 2 KM 1 FR
为消除上述缺点,图中采用中间继电 采用选择开关 S来 当按动按钮SB1时为长动工作, 器 K 进行连锁控制。当按 SB1时,通过K接 选择工作状态,S打开 而按复合按钮SB 时为点动工作。 2 通KM 且K自锁, 使电动机长动工作;若按 时为点动工作, S闭合 但此线路的可靠性不高, 如果KM SB 时 , 由于没有接通 K, 所以不能将KM自 2 时为长动工作。由于 的释放动作缓慢, 将因SB2的动断 锁,仅能点动工作,且当电动机已经起动 此线路操作时多了一 触点过早闭合, 使KM继续自锁而 长动工作后, 若再按点动按钮SB2, SB2将 个动作,故不太方便。 得电,并使电动机长动工作。 不能再起作用。
机电传动控制(第五版)课后习题答案解析全集
自动往复运动控制电路
SB1 KMR STa KMF
FR
SBF
KMF STb
KMR
SBR
关键措施
KMR 限位开关 采用复合式开 关。正向运行 停车的同时,自动起动反向 运行;反之亦然。
KMF
电机
STb
STa
(4)程序控制
8.16 要求三台电动机1M、2M、3M按一定顺序启动:即1M 启动后,2M才能启动; 2M启动后,3M才能启动;停产时 则同时停。试设计此控制线路。
直流电动机的额定值
额定值:电机制造厂对电机正常运行时,对相关电量 或机械量所规定的数据。
额定工况:在额定值运行
1. 额定功率PN : 电机轴上输出的机械功率(千瓦)。 2. 额定电压UN :额定工作情况下的电枢上加的直流电压。 3. 额定电流IN : 额定电压下,轴上输出额定功率时的 电流 三者关系:PN=UNIN ( :效率)
Ra U n T 2 K EΦ KT K EΦ
n n0 n
U n0 K EΦ Ra n T 2 KT K EΦ
3.10 一台他励直流电动机的技术数据如下:PN=6.5kW, UN=220V,IN=34.4A,nN=1500r/min,Ra=0.242 Ω,试计算出此 电动机的如下特性: ⑴ 固有机械特性
n0 110 1000 1107 ~ 1170 (r / min) 110 62(0.172 ~ 0.258)
Ra T 2 KT K EΦ
PN 5.5 TN 9550 9550 52.53( N m) nN 1000
3.9一台并励直流电动机的技术数据如下:PN=5.5kW,UN=110V, 若忽略机械磨擦和转子的铜耗、铁损,认为额定运行状态下的电磁 转矩近似等于额定输出转矩,试绘出它近似的固有机械特性曲线。 答:
机电传动控制课后习题答案《第五版》之欧阳史创编
习题与思考题第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和静态转矩。
拖动转矩是由电念头产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
静态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TMTL>0说明系统处于加速,TMTL<0 说明系统处于减速,TMTL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头标的目的暗示转矩的实际作用标的目的)TM=TL TM< TLTMTL<0说明系统处于减速。
TMTL<0 说明系统处于减速TMTL TMTL系统的运动状态是减速系统的运动状态是加速TMTLTMTL系统的运动状态是减速系统的运动状态2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电念头一般具有较高的额定转速。
这样,电念头与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩年夜,高速轴转矩小?因为P= Tω,P不变ω越小T越年夜,ω越年夜T 越小。
2.6为什么机电传动系统中低速轴的GD2比高速轴的GD2年夜很多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越年夜,转速越年夜GD2越小。
2.7 如图2.3(a)所示,电念头轴上的转动惯量JM=2.5kgm2,转速nM=900r/min; 中间传动轴的转动惯量JL=16kgm2,转速nL=60 r/min。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
习题与思考题第二章机电传动系统的动力学基础说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
试列出以下几种情况下(见题图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速(图中箭头方向表示转矩的实际作用方向)TM< TLTM-TL<0说明系统处于减速。
TM-TL<0 说明系统处于减速T M T L T M T LT M> T L系统的运动状态是减速系统的运动状态是加速T M T L T T L T M= T系统的运动状态是减速多轴拖动系统为什么要折算成单轴拖动系统转矩折算为什么依据折算前后功率不变的原则转动惯量折算为什么依据折算前后动能不变的原则因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=ω2为什么低速轴转矩大,高速轴转矩小因为P= Tω,P不变ω越小T越大,ω越大T 越小。
为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多因为P=Tω,T=GD2/375. P=ωGD2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
如图(a)所示,电动机轴上的转动惯量J M=, 转速n M=900r/min; 中间传动轴的转动惯量J L=16kgm2,转速n L=60r/min。
试求折算到电动机轴上的等效专惯量。
折算到电动机轴上的等效转动惯量:j=Nm/N1=900/300=3,j1=Nm/Nl=15J=JM+J1/j2+ JL/j12=+2/9+16/225=.如图(b)所示,电动机转速nM =950 r/min,齿轮减速箱的传动比J1= J2=4,卷筒直径D=,滑轮的减速比J3=2,起重负荷力 F=100N,电动机的费轮转距GD2M=m2, 齿轮,滑轮和卷筒总的传动效率为。
试球体胜速度v和折算到电动机轴上的静态转矩TL 以及折算到电动机轴上整个拖动系统的飞轮惯量GD2z.。
ωM=*2n/60= rad/s.提升重物的轴上的角速度ω=ωM /j1j2j3=4*4*2=sv=ωD/2=2*=s T L =ηC n M =*100**950= GD 2Z =δGD M 2+ GD L 2/j L 2 =*+100*322=一般生产机械按其运动受阻力的性质来分可有哪几种类型的负载可分为1恒转矩型机械特性2离心式通风机型机械特性3直线型机械特性4恒功率型机械特性,4种类型的负载.反抗静态转矩与位能静态转矩有何区别,各有什么特点反抗转矩的方向与运动方向相反,,方向发生改变时,负载转矩的方向也会随着改变,因而他总是阻碍运动的.位能转矩的作用方向恒定,与运动方向无关,它在某方向阻碍运动,而在相反方向便促使运动。
在题图中,曲线1和2分别为电动机和负载的机械特性,试判断哪些是系统的稳定平衡点哪些不是交点是系统的稳定平衡点. 交点是系统的平衡点 交点是系统的平衡 交点不是系统的平衡点 交点是系统的平衡点第三章为什么直流电机的转子要用表面有绝缘层的硅钢片叠压而成答:防止电涡流对电能的损耗..并励直流发电机正传时可以自励,反转时能否自励磁场被消除,所以不能自励.一台他励直流电动机所拖动的负载转矩 T L =常数,当电枢电压附加电阻改变时,能否改变其稳定运行状态下电枢电流的大小为什么这是拖动系统中那些要发生变化T=K t φI a u=E+I a R a当电枢电压或电枢附加电阻改变时,电枢电流大小不变.转速n 与电动机的电动势都发生改变.一台他励直流电动机在稳态下运行时,电枢反电势E= E 1,如负载转矩T L =常数,外加电压和电枢电路中的电阻均不变,问减弱励磁使转速上升到新的稳态值后,电枢反电势将如何变化 是大于,小于还是等于E 1T=I a K t φ, φ减弱,T 是常数,I a 增大.根据E N =U N -I a R a ,所以E N 减小.,小于E 1. 一台直流发电机,其部分铭牌数据如下:P N =180kW, U N =230V,n N =1450r/min,ηN =%,试求:①该发电机的额定电流;②电流保持为额定值而电压下降为100V 时,原动机的输出功率(设此时η=ηN )解:① P N =U N I N 180KW=230*I NI N =该发电机的额定电流为②P= I N 100/ηNP=已知某他励直流电动机的铭牌数据如下:P N =, U N =220V, n N =1500r/min, ηN =%,试求该电机的额定电流和转矩。
P N =U N I N ηN 7500W=220V*I N * I N = T N =n N=一台他励直流电动机:P N =15KW, U N =220V, I N =, n N =2850r/min,R a =Ω,其空载特性为:今需在额定电流下得到150V 和220 V 的端电压,问其励磁电流分别应为多少由空载特性其空载特性曲线. 当U=150V 时 I f = 当U=220V 时 I f =一台他励直流电动机的铭牌数据为:P N =, U N =110V, I N =62A, nN=1000r/min,试绘出它的固有机械特性曲线。
R a =~(1-P N /U N I N )U N /I N =(1-5500/110*62)*110/62 =Ωn 0=n N U N /(U N -I N R a )=1131r/min TN=*5500/1000 =1131一台并励直流电动机的技术数据如下:P N =,U N =110V, I N =61A,额定励磁电流Ifn=2A, n N =1500r/min,电枢电阻R a =Ω,若忽略机械磨损和转子的铜耗,铁损,认为额定运行状态下的电磁转矩近似等于额定输出转矩,试绘出它近似的固有机械特性曲线。
n 0=U N n N /(U N -I N R a ) T N =n N=110*1500/(110-61* =*5500/1500=1687 r/min =35Nm1687一台他励直流电动机的技术数据如下:P N =,U N =220V, I N =, n N =1500r/min, R a =Ω,试计算出此电动机的如下特性: ①固有机械特性;②电枢服加电阻分别为3Ω和5Ω时的人为机械特性;③电枢电压为U N /2时的人为机械特性; ④磁通φ=φN 时的人为机械特性; 并绘出上述特性的图形。
① n 0=U N n N /(U N -I N R a ) =220*1500/* = 1559r/minT N =nN=*6500/1500=②当当③④定电压时,他励直流电动机直接启动过程中的要求是1 启动电流不要过大,2不要有过大的转矩.可以通过两种方法来实现电动机的启动一 是降压启动 .二是在电枢回路内串接外加电阻启动.直流他励电动机启动时,为什么一定要先把励磁电流加上若忘了先合励磁绕阻的电源开关就把电枢电源接通,这是会产生什么现象(试从T L =0 和T L =T N 两种情况加以分析)当电动机运行在额定转速下,若突然将励磁绕阻断开,此时又将出现什么情况直流他励电动机启动时,一定要先把励磁电流加上使因为主磁极靠外电源产生磁场.如果忘了先合励磁绕阻的电源开关就把电枢电源接通,T L =0时理论上电动机转速将趋近于无限大,引起飞车, T L =T N 时将使电动机电流大大增加而严重过载.直流串励电动机能否空载运行为什么串励电动机决不能空载运行,因为这时电动机转速极高,所产生的离心力足以将绕组元件甩到槽外,还可能串励电动机也可能反转运行.但不能用改变电源极性的方法,因这时电枢电流Ia 与磁通φ同时反响,使电瓷转矩T 依然保持原来方向,则电动机不可能反转.一台直流他励电动机,其额定数据如下:P N =,U N =U f =110V,n N =1500r/min, ηN =,R a =Ω, R f =Ω 。
试求:① 额定电枢电流I An ; ② 额定励磁电流I fN ; ③ 励磁功率P f ; ④ 额定转矩T N ;⑤ 额定电流时的反电势; ⑥ 直接启动时的启动电流;⑦ 如果要是启动电流不超过额定电流的2倍,求启动电阻为多少欧此时启动转矩又为多少 ① P N =U N I aN ηN2200=110*I aN * I aN =25A ② U f = R f I fNI fN =110/ = ③ P f = U f I fN =④额定转矩T N = P N / n N =14Nm⑤ 额定电流时的反电势E N =U N -I N R a=*25 =100V⑥ 直接启动时的启动电流I st =U N /R a=110/ =275A ⑦ 启动电阻 2I N > U N / (R a +R st ) R st >Ω启动转矩K e φ=(U N -I N R a )/n N =Ia= U N / (R a +R st )T=K t I a φ= =** =直流电动机用电枢电路串电阻的办法启动时,为什么要逐渐切除启动电阻如切出太快,会带来什么后果如果启动电阻一下全部切除,,在切除瞬间,由于机械惯性的作用使电动机的转速不能突变,在此瞬间转速维持不变,机械特性会转到其他特性曲线上,此时冲击电流会很大,所以采用逐渐切除启动电阻的方法.如切除太快,会有可能烧毁电机.转速调节(调速)与固有的速度变化在概念上有什么区别速度变化是在某机械特性下,由于负载改变而引起的,二速度调节则是某一特定的负载下,靠人为改变机械特性而得到的. 他励直流电动机有哪些方法进行调速它们的特点是什么 他励电动机的调速方法: 第一改变电枢电路外串接电阻R ad特点在一定负载转矩下,串接不同的电阻可以得到不同的转速,机械特性较软,电阻越大则特性与如软,稳定型越低,载空或轻载时,调速范围不大,实现无级调速困难,在调速电阻上消耗大量电量。
第二改变电动机电枢供电电压特点当电压连续变化时转速可以平滑无级调速,一般只能自在额定转速以下调节,调速特性与固有特性相互平行,机械特性硬度不变,调速的稳定度较高,调速范围较大,调速时因电枢电流与电压无关,属于恒转矩调速,适应于对恒转矩型负载。