机电传动控制冯清秀邓星钟第五版习题及答案
机电传动控制(第五版)课后习题答案
机电传动控制(第五版)课后习题答案习题与思考题第⼆章机电传动系统的动⼒学基础2.1 说明机电传动系统运动⽅程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是有电动机产⽣⽤来克服负载转矩,以带动⽣产机械运动的。
静态转矩就是由⽣产机械产⽣的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动⽅程式怎样看出系统是处于加速,减速,稳态的和静态的⼯作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的⼯作状态。
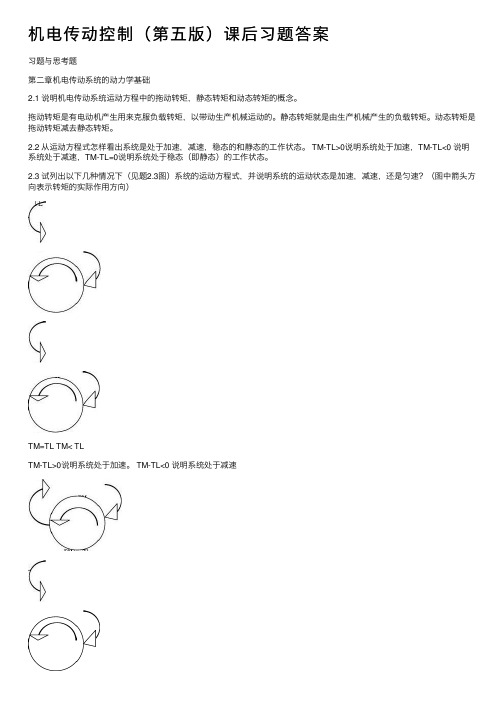
2.3 试列出以下⼏种情况下(见题2.3图)系统的运动⽅程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头⽅向表⽰转矩的实际作⽤⽅向)TM=TL TM< TLTM-TL>0说明系统处于加速。
TM-TL<0 说明系统处于减速系统的运动状态是减速系统的运动状态是加速系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多⽣产机械要求低转速运⾏,⽽电动机⼀般具有较⾼的额定转速。
这样,电动机与⽣产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,⽪带等减速装置。
所以为了列出系统运动⽅程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到⼀根轴上。
转矩折算前后功率不变的原则是P=Tω, p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩⼤,⾼速轴转矩⼩?因为P= Tω,P不变ω越⼩T越⼤,ω越⼤T 越⼩。
2.6为什么机电传动系统中低速轴的GD2逼⾼速轴的GD2⼤得多?因为P=Tω,T=G?D2/375. P=ωG?D2/375. ,P不变转速越⼩GD2越⼤,转速越⼤GD2越⼩。
2.7 如图2.3(a)所⽰,电动机轴上的转动惯量J M=2.5kgm2,转速n M=900r/min;中间传动轴的转动惯量J L=16kgm2,转速n L=60 r/min。
华中科大机电传动控制(第五版)课后习题答案解析

n 1 n 0 1 n 1 19 9 .4 2 2 1 98 .8 (r/5 m 6i
3.11 为什么直流电动机直接启动时启动电流很大? 答: 因为Tst=UN/Ra,Ra很小,所以Tst很大,会产生控制火花, 电动应力,机械动态转矩冲击,使电网保护装置动作,切断电源 造成事故,或电网电压下降等。故不能直接启动。
⑷ 当 0 .8 N 时 n 0 1 , K U e 0 .8 U K N e N 0 n .0 8 1 0 .8 5 15 ( 9 r/9 m 49 i
n 1 K e K R a t 2 T N 0 .8 2 K R e a K t 2 N T N = 0 .1 8 2 n 0 5 .8 2 9 9 .2 ( 2 r/m
答:
T N95n P N N 59 051 5 5 .5 5 00 3.0 0 5(N 2m )
IN IN IfN 6 1 2 5(A 9 )
n0
UN K eN
UNnN UNIaNRa
n0111 1 5 010 95 0.201 06(r8/m 0 in)
答:a匀速,b减速,c减速,d加速,e减速,f匀速
2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什 么依据折算前后功率不变的原则?转动惯量折算为什么依据折算 前后动能不变的原则?
答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动
部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。
答: j1=ωM/ω1= nM/n1=900/300=3 jL=ωM/ωL= nM/nL=900/60=15
JZ JM J j1 2 1J jL L 2 2 .5 3 2 2 1 125 6 2 .8 (kg m )
机电传动控制冯清秀邓星钟第五版习题及答案

机电传动控制冯清秀邓星钟第五版习题及答案案场各岗位服务流程销售大厅服务岗:1、销售大厅服务岗岗位职责:1)为来访客户提供全程的休息区域及饮品;2)保持销售区域台面整洁;3)及时补足销售大厅物资,如糖果或杂志等;4)收集客户意见、建议及现场问题点;2、销售大厅服务岗工作及服务流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
班中工作程序服务流程行为规范迎接指引递阅资料上饮品(糕点)添加茶水工作要求1)眼神关注客人,当客人距3米距离时,应主动跨出自己的位置迎宾,然后侯客迎询问客户送客户注意事项15度鞠躬微笑问候:“您好!欢迎光临!”2)在客人前方1-2米距离领位,指引请客人向休息区,在客人入座后问客人对座位是否满意:“您好!请问坐这儿可以吗?”得到同意后为客人拉椅入座“好的,请入座!”3)若客人无置业顾问陪同,可询问:请问您有专属的置业顾问吗?,为客人取阅项目资料,并礼貌的告知请客人稍等,置业顾问会很快过来介绍,同时请置业顾问关注该客人;4)问候的起始语应为“先生-小姐-女士早上好,这里是XX销售中心,这边请”5)问候时间段为8:30-11:30 早上好11:30-14:30 中午好 14:30-18:00下午好6)关注客人物品,如物品较多,则主动询问是否需要帮助(如拾到物品须两名人员在场方能打开,提示客人注意贵重物品);7)在满座位的情况下,须先向客人致歉,在请其到沙盘区进行观摩稍作等待;阶段工作及服务流程班中工作程序工作要求注意事项饮料(糕点服务)1)在所有饮料(糕点)服务中必须使用托盘;2)所有饮料服务均已“对不起,打扰一下,请问您需要什么饮品”为起始;3)服务方向:从客人的右面服务;4)当客人的饮料杯中只剩三分之一时,必须询问客人是否需要再添一杯,在二次服务中特别注意瓶口绝对不可以与客人使用的杯子接触;5)在客人再次需要饮料时必须更换杯子;下班程序1)检查使用的工具及销售案场物资情况,异常情况及时记录并报告上级领导;2)填写物资领用申请表并整理客户意见;3)参加班后总结会;4)积极配合销售人员的接待工作,如果下班时间已经到,必须待客人离开后下班;1.3.3.3吧台服务岗1.3.3.3.1吧台服务岗岗位职责1)为来访的客人提供全程的休息及饮品服务;2)保持吧台区域的整洁;3)饮品使用的器皿必须消毒;4)及时补充吧台物资;5)收集客户意见、建议及问题点;1.3.3.3.2吧台服务岗工作及流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
机电传动控制(第五版)课后习题答案
2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
2.7 如图2.3(a)所示,电动机轴上的转动惯量J M=2.5kgm2, 转速n M=900r/min; 中间传动轴的转动惯量J L=16kgm2,转速n L=60 r/min。
试求折算到电动机轴上的等效专惯量。
折算到电动机轴上的等效转动惯量:j=Nm/N1=900/300=3,j1=Nm/Nl=15J=JM+J1/j2+ JL/j12=2.5+2/9+16/225=2.79kgm2.2.8如图2.3(b)所示,电动机转速n M=950 r/min,齿轮减速箱的传动比J1= J2=4,卷筒直径D=0.24m,滑轮的减速比J3=2,起重负荷力F=100N,电动机的费轮转距GD2M=1.05N m2, 齿轮,滑轮和卷筒总的传动效率为0.83。
机电传动控制(第五版)课后习题答案解析全集.共114页文档

机电传动控制(第五版)课后 习题答案解对犯 罪的法 律,而 是针对 疯狂的 法律。 ——马 克·吐温 42、法律的力量应当跟随着公民,就 像影子 跟随着 身体一 样。— —贝卡 利亚 43、法律和制度必须跟上人类思想进 步。— —杰弗 逊 44、人类受制于法律,法律受制于情 理。— —托·富 勒
45、法律的制定是为了保证每一个人 自由发 挥自己 的才能 ,而不 是为了 束缚他 的才能 。—— 罗伯斯 庇尔
谢谢
《机电传动控制》第五版课后习题答案

第3章直流电机的工作原理及特性习题3.1 为什么直流电机的转子要用表面有绝缘层的硅钢片叠压而成?答案:直流电动机工作时,(1)电枢绕组中流过交变电流,它产生的磁通当然是交变的。
这个(2)变化的磁通在铁芯中产生感应电流。
铁芯中产生的感应电流,在(3)垂直于磁通方向的平面内环流,所以叫涡流。
涡流损耗会使铁芯发热。
为了减小这种涡流损耗,电枢铁芯采用彼此绝缘的硅钢片叠压而成,使涡流在狭长形的回路中,通过较小的截面,以(4)增大涡流通路上的电阻,从而起到(5)减小涡流的作用。
如果没有绝缘层,会使整个电枢铁芯成为一体,涡流将增大,使铁芯发热。
因此,如果没有绝缘,就起不到削减涡流的作用。
习题3.4 一台他励直流电动机在稳态下运行时,电枢反电势E =E1,如负载转矩TL =常数,外加电压和电枢电路中的电阻均不变,问减弱励磁使转速上升到新的稳定值后,电枢反电势将如何变化?是大于、小于还是等于E1?答案:∵当电动机再次达到稳定状态后,输出转矩仍等于负载转矩,即输出转矩T =T L =常200aae e ae m ae m e e R U n I K K R U n E K n T K I n n n K K K U T K =Φ=−ΦΦ=∴=Φ−Φ∴−∆=Φ=ΦQ Q 又当T=0a aU E I R =+数。
又根据公式(3.2), T =K t ФI a 。
∵励磁磁通Ф减小,T 、K t 不变。
∴电枢电流I a 增大。
再根据公式(3.11),U =E +I a ·R a 。
∴E=U -I a ·R a 。
又∵U 、R a 不变,I a 增大。
∴E 减小即减弱励磁到达稳定后,电动机反电势将小于E 1。
习题3.8 一台他励直流电动机的铭牌数据为:P N =5.5KW ,U N =110V ,I N =62A ,n N =1000r/min ,试绘出它的固有机械特性曲线。
(1)第一步,求出n 0 (2)第二步,求出(T N ,n N )答案:根据公式(3.15),(1-1)Ra =(0.50~0.75)(N N N I U P −1)NN I U我们取Ra =0.7(N N N I U P −1)NN I U, 计算可得,Ra =0.24 Ω 再根据公式(3.16)得,(1-2) Ke ФN =(U N -I N Ra )/n N =0.095 又根据(1-3) n 0=U N /(Ke ФN ),计算可得,n 0=1158 r/min 根据公式(3.17),(2-1) T N =9.55NNn P , 计算可得,T N =52.525 N ·M 根据上述参数,绘制电动机固有机械特性曲线如下:3.10一台他励直流电动机的技术数据如下:P N =6.5KW ,U N =220V , IN=34.4A , n N =1500r/min , R a =0.242Ω,试计算出此电动机的如下特性:①固有机械特性;②电枢附加电阻分别为3Ω和5Ω时的人为机械特性;③电枢电压为U N /2时的人为机械特性; ④磁通φ=0.8φN 时的人为机械特性;并绘出上述特性的图形。
机电传动控制课后习题答案《第五版》
机电传动控制课后习题答案《第五版》习题与思考题第⼆章机电传动系统的动⼒学基础2.1说明机电传动系统运动⽅程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产⽣⽤来克服负载转矩,以带动⽣产机械运动的。
静态转矩就是由⽣产机械产⽣的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2从运动⽅程式怎样看出系统是处于加速,减速,稳态的和静态的⼯作状 ^态。
TM-TL>0说明系统处于加速,TM-TLvO说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的⼯作状态。
2.3试列出以下⼏种情况下(见题2.3图)系统的运动⽅程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头⽅向表⽰转矩的实际作⽤⽅向)系统的运动状态是减速系统的运动状态是加速TM< TLTM-TLvO说明系统处于减速。
TM-TLvO 说明系统处于减速T M>T LT L T MT M=T L系统的运动状态是减速2.4多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多⽣产机械要求低转速运⾏,⽽电动机⼀般具有较⾼的额定转速。
这样,电动机与⽣产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,⽪带等减速装置。
所以为了列出系统运动⽅程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到⼀根轴上。
转矩折算前后功率不变的原则是P=T? , p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5J?2 2.5为什么低速轴转矩⼤,⾼速轴转矩⼩?因为P= T w ,P不变3越⼩T越⼤,3越⼤T越⼩。
2.6为什么机电传动系统中低速轴的GD⽐⾼速轴的GD⼤得多?因为P=T w, T⼆G?&375. P= 3 G?⽩375. ,P 不变转速越⼩GD越⼤, 转速越⼤GD越⼩。
2.7 如图2.3 ( a)所⽰,电动机轴上的转动惯量J M=2.5kgm2,转速n M=900r/min;中间传动轴的转动惯量j L=16kgm转速n L=60r/min。
机电传动控制(第五版)课后习题答案
2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
2.7 如图2.3(a)所示,电动机轴上的转动惯量J M=2.5kgm2, 转速n M=900r/min; 中间传动轴的转动惯量J L=16kgm2,转速n L=60 r/min。
试求折算到电动机轴上的等效专惯量。
折算到电动机轴上的等效转动惯量:j=Nm/N1=900/300=3,j1=Nm/Nl=15J=JM+J1/j2+ JL/j12=2.5+2/9+16/225=2.79kgm2.2.8如图2.3(b)所示,电动机转速n M=950 r/min,齿轮减速箱的传动比J1= J2=4,卷筒直径D=0.24m,滑轮的减速比J3=2,起重负荷力F=100N,电动机的费轮转距GD2M=1.05N m2, 齿轮,滑轮和卷筒总的传动效率为0.83。
《机电传动控制》冯清秀版课后习题答案
课后习题答案第一章第二章2.1答:运动方程式:dt d J T T L M ω=-dL M T T T =-Td>0时:系统加速; Td=0 时:系统稳速;Td<0时,系统减速或反向加速 2.2答:拖动转矩:电动机产生的转矩Tm 或负载转矩TL 与转速n 相同时,就是拖动转矩。
静态转矩:电动机轴上的负载转矩TL ,它不随系统加速或减速而变化。
动态转矩:系统加速或减速时,存在一个动态转矩Td ,它使系统的运动状态发生变化。
2.3答:a 匀速,b 减速,c 减速,d 加速,e 减速,f 匀速2.4答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。
由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。
由于转动惯量和飞轮转矩与运动系统动能有关,所以可根据动能守恒原则进行折算。
2.5答:忽略磨擦损失的情况下,传动系统的低速轴和调速轴传递的功率是一样的,即P1=P2而P1=T1ω1,P2=T2ω2所以T1ω1=T2ω2,当ω1>ω2时, T1<T22.6答:因为低速轴的转矩大,所设计的低速轴的直径及轴上的齿轮等零件尺寸大,质量也大,所以GD2大,而高速轴正好相反。
2.7答: j1=ωM/ω1= nM/n1=900/300=3jL=ωM/ωL= nM/nL=900/60=15)(8.21516325.2222211m kg j J j J J J L L M Z ⋅=++=++= 2.8答:m in)/(4.594495021r j j n n M L =⨯==)/(37.02604.5924.0603s m j Dn v L =⨯⨯⨯==ππTL=9.55Fv/(η1nM)=9.55×100×0.37/(0.83×950)=0.45N.m2222365M M Z n Fv GD GD +=δ 222232.1~16.195037.010036505.1)25.1~1.1(m N GD Z⋅=⨯⨯+⨯= 2.9答:恒转矩型、泵类、直线型、恒功率型。
《机电传动控制》冯清秀版课后习题答案
课后习题答案第一章第二章2.1答:运动方程式:dtd JT T LM dL MT T T Td>0时:系统加速;Td=0 时:系统稳速;Td<0时,系统减速或反向加速2.2答:拖动转矩:电动机产生的转矩Tm 或负载转矩TL 与转速n 相同时,就是拖动转矩。
静态转矩:电动机轴上的负载转矩TL ,它不随系统加速或减速而变化。
动态转矩:系统加速或减速时,存在一个动态转矩Td ,它使系统的运动状态发生变化。
2.3答:a 匀速,b 减速,c 减速,d 加速,e 减速,f 匀速2.4答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。
由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。
由于转动惯量和飞轮转矩与运动系统动能有关,所以可根据动能守恒原则进行折算。
2.5答:忽略磨擦损失的情况下,传动系统的低速轴和调速轴传递的功率是一样的,即P1=P2而P1=T1ω1,P2=T2ω2所以T1ω1=T2ω2,当ω1>ω2时,T1<T2 2.6答:因为低速轴的转矩大,所设计的低速轴的直径及轴上的齿轮等零件尺寸大,质量也大,所以GD2大,而高速轴正好相反。
2.7答:j1=ωM/ω1= nM/n1=900/300=3 jL=ωM/ωL= nM/nL=900/60=15)(8.21516325.2222211m kg j J jJ J J LL MZ 2.8答:m in)/(4.594495021r j j n n M L)/(37.02604.5924.0603s m j Dn vL TL=9.55Fv/(η1nM)=9.55×100×0.37/(0.83×950)=0.45N.m2222365MMZnFv GDGD222232.1~16.195037.010036505.1)25.1~1.1(mN GDZ2.9答:恒转矩型、泵类、直线型、恒功率型。
华中科大机电传动控制课后习题答案解析
华中科大机电传动控制(第五版)课后习题答案解析(D O C)(总34页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--机电传动控制冯清秀 邓星钟 等编著第五版 课后习题答案详解说明机电传动系统运动方程式中的拖动转矩、静态转矩和动态转矩的概念。
答:拖动转矩:电动机产生的转矩Tm 或负载转矩TL 与转速n 相同时,就是拖动转矩。
静态转矩:电动机轴上的负载转矩TL ,它不随系统加速或减速而变化。
动态转矩:系统加速或减速时,存在一个动态转矩Td ,它使系统的运动状态发生变化。
从运动方程式怎样看出系统是加速的、减速的、稳定的和静止的各种工作状态dtd JT T L M ω=-答:运动方程式:dL M T T T =-Td>0时:系统加速; Td=0 时:系统稳速;Td<0时,系统减速或反向加速试列出以下几种情况下系统的运动方程式,并说明系统的运行状态是加速、减速还是匀速(图中箭头方向表示转矩的实际作用方向)答:a 匀速,b 减速,c 减速,d 加速,e 减速,f 匀速多轴拖动系统为什么要折算成单轴拖动系统转矩折算为什么依据折算前后功率不变的原则转动惯量折算为什么依据折算前后动能不变的原则答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。
由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。
由于转动惯量和飞轮转矩与运动系统动能有关,所以可根据动能守恒原则进行折算。
为什么低速轴转矩大调速轴转矩小答:忽略磨擦损失的情况下,传动系统的低速轴和调速轴传递的功率是一样的,即P1=P2 而P1=T1ω1,P2=T2ω2所以T1ω1=T2ω2,当ω1>ω2时, T1<T2为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多答:因为低速轴的转矩大,所设计的低速轴的直径及轴上的齿轮等零件尺寸大,质量也大,所以GD2大,而高速轴正好相反。
机电传动控制 冯清秀 邓星钟 第五章课后习题答案
5.1步进电动机的位移量与输入脉冲数严格成正比,这就不会引起误差的积累,其转速与脉冲频率和步矩角有关。
控制输入脉冲数量、频率及电动机各组的接通次序,可以得到各种需要的运行特征。
5.2步进电机的作用就是能够精确控制转动的角度,步距角越小,它每一步能转动的角度就越小,我们就能得到更精确的角度控制.比如步角为3度的,我们可以控制3度,6度,9度...,而步角为10度的,我们只能控制10度,20度,30度...显然步角越小,能控制的角度越精确.5.3电磁式(激磁式)特点:电动机的定子和转子均有绕组,靠电磁力矩使转子转动。
磁阻式(反应式)特点:气隙小,定位精度高;步距小,控制准确;励磁电流较大,要求驱动电源功率大;电动机内部阻尼较长,当相数较小时,单步运行振荡时间较长;断电后无定位转矩,使用中需自锁定位。
永磁式特点:步距角大,控制精度不高;控制功率小,效率高;内阻尼较大,单片振荡时间短;断电后具有一定的定位转矩。
混合式(永磁感应子式)特点:驱动电流小,效率高,过载能力强,控制精度高。
5.4每当输入一个电脉冲时,电动机转过的一个固定的角度称为步矩角。
一台步进电动机有两个步矩角,说明它有两种通电方式,3°的意思是相邻两次通电的相的数目相同时的步矩角,1.5°的意思是相邻两次通电的相的数目不同时的步矩角。
单三拍:每次只有一相绕组通电,而每个循环只有三次通电。
单双六拍:第一次通电有一相绕组通电,然后下一次有两相通电,这样交替循环运行,而每次循环只有六次通电。
双三拍:每次有两相绕组通电,每个循环有三次通电。
5.8 1) 步距角——步进电动机的主要性能指标之一,它直接影响启动和运行频率2)最大静转矩3) 空载启动频率——步进电动机在空载情况下,不失步启动所允许的最高频率。
在负载情况下,不失步启动所允许的最高频率随负载的增加而显著下降。
4) 连续运行频率——当步进电动机运行频率连续上升时,电动机不失步运行的最高频率。
机电传动控制(第五版)课后习题答案解析全集
自动往复运动控制电路
SB1 KMR STa KMF
FR
SBF
KMF STb
KMR
SBR
关键措施
KMR 限位开关 采用复合式开 关。正向运行 停车的同时,自动起动反向 运行;反之亦然。
KMF
电机
STb
STa
(4)程序控制
8.16 要求三台电动机1M、2M、3M按一定顺序启动:即1M 启动后,2M才能启动; 2M启动后,3M才能启动;停产时 则同时停。试设计此控制线路。
110 1500 1680 (r / min) 110 59 0.2
Ra U n T 2 K EΦ KT K EΦ
3.10 一台他励直流电动机的技术数据如下:PN=6.5kW, UN=220V,IN=34.4A,nN=1500r/min,Ra=0.242 Ω,试计算出此 电动机的如下特性: ⑴ 固有机械特性 ⑵ 电枢附加电阻分别为3 Ω和5 Ω 时的人为机械特性 ⑶ 电枢电压为UN/2时的人为机械特性 ⑷ 磁通Φ=0.8 ΦN时的人为机械特性
在( 1 )中,n n0 nN 1559 1500 59(r / min)
Ra RaTN 2 T n ,所以 K K N e t n Ke Kt 2 R ad 1 Ra Rad 1 Ra Rad 1 当串入 R ad 1 3时, n1 TN n= 1+ n 2 Ra Ra Ke Kt 3 n1 1+ 59 790(r / min) 0.242
正反转控制线路
L1 S
L2 L3
FU
KM
FR M 3~ KM2 R2 KM1 R1
串电阻启动
S FU
KM1 KM2
机电传动控制(第五版)课后习题答案
机电传动控制(第五版)课后习题答案习题与思考题第⼆章机电传动系统的动⼒学基础2.1 说明机电传动系统运动⽅程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是有电动机产⽣⽤来克服负载转矩,以带动⽣产机械运动的。
静态转矩就是由⽣产机械产⽣的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动⽅程式怎样看出系统是处于加速,减速,稳态的和静态的⼯作状态。
>0说明系统处于加速,<0 说明系统处于减速,0说明系统处于稳态(即静态)的⼯作状态。
2.3 试列出以下⼏种情况下(见题2.3图)系统的运动⽅程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头⽅向表⽰转矩的实际作⽤⽅向)<>0说明系统处于加速。
<0 说明系统处于减速系统的运动状态是减速系统的运动状态是加速系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多⽣产机械要求低转速运⾏,⽽电动机⼀般具有较⾼的额定转速。
这样,电动机与⽣产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,⽪带等减速装置。
所以为了列出系统运动⽅程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到⼀根轴上。
转矩折算前后功率不变的原则是ω, p 不变。
转动惯量折算前后动能不变原则是能量守恒0.5Jω22.5为什么低速轴转矩⼤,⾼速轴转矩⼩?因为 Tω不变ω越⼩T越⼤,ω越⼤T 越⼩。
2.6为什么机电传动系统中低速轴的2逼⾼速轴的2⼤得多?因为ω,?D2/375. ωG?D2/375. 不变转速越⼩2越⼤,转速越⼤2越⼩。
2.7 如图2.3(a)所⽰,电动机轴上的转动惯量2.52, 转速900;中间传动轴的转动惯量162,转速60。
试求折算到电动机轴上的等效专惯量。
折算到电动机轴上的等效转动惯量1=900/300=311512+ 12=2.5+2/9+16/225=2.792.2.8如图2.3(b)所⽰,电动机转速950 ,齿轮减速箱的传动⽐J1= J2=4,卷筒直径0.24m,滑轮的减速⽐J3=2,起重负荷⼒100N,电动机的费轮转距2M1.05N m2, 齿轮,滑轮和卷筒总的传动效率为0.83。
《机电传动控制》冯清秀版课后习题问题详解
课后习题答案第一章第二章2.1答:运动方程式:dt d JT T L M ω=-dL M T T T =-Td>0时:系统加速; Td=0 时:系统稳速;Td<0时,系统减速或反向加速2.2答:拖动转矩:电动机产生的转矩Tm 或负载转矩TL 与转速n 相同时,就是拖动转矩。
静态转矩:电动机轴上的负载转矩TL ,它不随系统加速或减速而变化。
动态转矩:系统加速或减速时,存在一个动态转矩Td ,它使系统的运动状态发生变化。
2.3答:a 匀速,b 减速,c 减速,d 加速,e 减速,f 匀速2.4答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。
由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。
由于转动惯量和飞轮转矩与运动系统动能有关,所以可根据动能守恒原则进行折算。
2.5答:忽略磨擦损失的情况下,传动系统的低速轴和调速轴传递的功率是一样的,即P1=P2而P1=T1ω1,P2=T2ω2所以T1ω1=T2ω2,当ω1>ω2时, T1<T22.6答:因为低速轴的转矩大,所设计的低速轴的直径及轴上的齿轮等零件尺寸大,质量也大,所以GD2大,而高速轴正好相反。
2.7答: j1=ωM/ω1= nM/n1=900/300=3 jL=ωM/ωL= nM/nL=900/60=15)(8.21516325.2222211m kg j J j J J J L L M Z ⋅=++=++= 2.8答:m in)/(4.594495021r j j n n M L =⨯==)/(37.02604.5924.0603s m j Dn v L =⨯⨯⨯==ππTL=9.55Fv/(η1nM)=9.55×100×0.37/(0.83×950)=0.45N.m2222365M MZn Fv GD GD +=δ222232.1~16.195037.010036505.1)25.1~1.1(m N GD Z⋅=⨯⨯+⨯=2.9答:恒转矩型、泵类、直线型、恒功率型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机电传动控制冯清秀邓星钟第五版习题及答案第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0 说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0 说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3 图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM TMTLTLNTM=TL TM< TLTM-TL>0 说明系统处于加速。
TM-TL<0 说明系统处于减速TM TL TM TLTM> TLTM>TL系统的运动状态是减速系统的运动状态是加速TMTM= TLTM=TL系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=T ω,p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5 为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T 越大,ω越大T 越小。
2.6 为什么机电传动系统中低速轴的GD2 逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P 不变转速越小GD2 越大,转速越大GD2 越小。
2.7 如图2.3 (a )所示,电动机轴上的转动惯量M ML LM z.。
J =2.5kgm 2, 转速 n =900r/min; 中间传动轴的转动 惯量 J=16k g m 2,转速n =60 r r /m i n 。
试求折算到电动 机轴上的等效专惯量。
折 算 到 电 动 机 轴 上 的 等 效 转 动 惯量:j=Nm/N1=900/300=3,j1=Nm/Nl=15 J=JM+J1/j 2+ JL/j12=2.5+2/9+16/225=2.79kgm 2. 2.8 如图 2.3(b )所示,电动机转速 n M =950 r/min ,齿轮减速箱的传动比 J 1= J 2=4,卷筒直径 D=0.24m, 滑轮的减速比 J 3=2,起重负荷力 F=100N,电动机的费 轮转距 GD 2=1.05N m 2, 齿轮,滑轮和卷筒总的传动效率为 0.83。
试球体胜速度 v 和折算到电动机轴上的 静态转矩 T L 以及折算到电动机轴上整个拖动系统的 飞轮惯量 GD 2ωM =3.14*2n/60=99.43 rad/s.提 升 重 物 的 轴 上 的 角 速 度 ω = ωM/j 1j 2j 3=99.43/4*4*2=3.11rad/sv=ωD/2=0.24/2*3.11=0.373m/sT L =9.55FV/ηC n M =9.55*100*0.373/0.83*950=0.45NM GD 2 =δGD 2+ GD 2/j 2ZM L L=1.25*1.05+100*0.242/322=1.318NM22.9 一般生产机械按其运动受阻力的性质来分可有哪几种类型的负载?可分为1 恒转矩型机械特性2 离心式通风机型机械特性3直线型机械特性4 恒功率型机械特性,4 种类型的负载.2.10 反抗静态转矩与位能静态转矩有何区别,各有什么特点?反抗转矩的方向与运动方向相反,,方向发生改变时,负载转矩的方向也会随着改变,因而他总是阻碍运动的.位能转矩的作用方向恒定,与运动方向无关,它在某方向阻碍运动,而在相反方向便促使运动。
2.11 在题2.11 图中,曲线1 和2 分别为电动机和负载的机械特性,试判断哪些是系统的稳定平衡点?哪些不是?交点是系统的稳定平衡点. 交点是系统的平衡点交点是系统的平衡交点不是系统的平衡点交点是系统的平衡点第三章3.1 为什么直流电记得转子要用表面有绝缘层的硅钢片叠压而成?直流电机的转子要用表面有绝缘层的硅钢片叠加而成是因为要防止电涡流对电能的损耗..3.2 并励直流发电机正传时可以自励,反转时能否自励?不能,因为反转起始励磁电流所产生的磁场的方向与剩与磁场方向相反,这样磁场被消除,所以不能自励. 3.3 一台他励直流电动机所拖动的负载转矩 T L =常数,当电枢电压附加电阻改变时,能否改变其运行其运行状 态下电枢电流的大小?为什么?这是拖动系统中那 些要发生变化? T=K t φI a u=E+I a R a当电枢电压或电枢附加电阻改变时,电枢电流大小不 变.转速 n 与电动机的电动势都发生改变.3.4 一台他励直流电动机在稳态下运行时,电枢反电势E= E 1,如负载转矩 T L =常数,外加电压和电枢电路中 的电阻均不变,问减弱励磁使转速上升到新的稳态值 后,电枢反电势将如何变化? 是大于,小于还是等于 E 1?T=I a K t φ, φ减弱,T 是常数,I a 增大.根据 E N =U N -I a R a ,所 以 E N 减小.,小于 E 1.3.5 一台直流发电机,其部分铭牌数据如下:P N =180kW,U N =230V,n N =1450r/min,ηN =89.5%,试求:①该发电机的额定电流;②电流保持为额定值而电压下降为 100V 时,原动机 的输出功率(设此时η=ηN ) P N =U N I N180KW=230*I NI N =782.6A该发电机的额定电流为 782.6A P= I N 100/ηNP=87.4KW3.6 已知某他励直流电动机的铭牌数据如下:P N =7.5KW,U N =220V, n N =1500r/min, ηN =88.5%, 试求该电机的 额定电流和转矩。
P N =U N I N ηN7500W=220V*I N *0.885 I N =38.5A T N =9.55P N /n N=47.75Nm3.7 一台他励直流电动机:P N =15KW, U N =220V,I N =63.5A , n N =2850r/min,R a =0.25Ω,其空载特性为:今需在额定电流下得到150V 和220 V 的端电压,问其励磁电流分别应为多少?由空载特性其空载特性曲线.当U=150V 时If =0.71A当U=220V 时If=1.08A3.8 一台他励直流电动机的铭牌数据为:PN=5.5KW,UN =110V, IN=62A, nN=1000r/min,试绘出它的固有机械特性曲线。
R a =(0.50~0.75)(1-PN/UNIN)UN/IN=0.6(1-5500/110*62)*110/62 =0.206Ωn 0=nNUN/(UN-INRa)=1131r/minTN=9.55*5500/1000 =52.525Nm52.5253.9 一台并励直流电动机的技术数据如下:PN=5.5KW,UN =110V, IN=61A,额定励磁电流If n=2A,nN=1500r/m i n,电枢电阻Ra=0.2Ω,若忽略机械磨损和转子的铜耗,铁损,认为额定运行状态下的电磁转矩近似等于额定输出转矩,试绘出它近似的固有机械特性曲线。
n 0=UNnN/(UN-INRa) TN=9.55PN/nN=110*1500/(110-61*0.2)=9.55*5500/1500=1687 r/min =35Nm3.10 一台他励直流电动机的技术数据如下:PN=6.5KW,UN =220V, IN=34.4A, nN=1500r/min, Ra=0.242Ω,试计算出此电动机的如下特性:①固有机械特性;②电枢服加电阻分别为3Ω和5Ω时的人为机械特性;③电枢电压为UN/2 时的人为机械特性;④磁通φ=0.8φN时的人为机械特性;并绘出上述特性的图形。
① n0=UNnN/(UN-INRa)=220*1500/220-34.4*0.242 = 1559r/minT N =9.55PN/nN=9.55*6500/1500e a ad e t② n=U/K φ-(R +R )T/K K φ22 2= U/K e φ-(R a +R ad )T/9.55K e φ当 3Ω n=854r/min 当 5Ω n=311 r/min③ e a e当 U N =0.5U N 时 n=732 r/min n 0=U N n N /2(U N -I N R a ) =780 r/min④当φ=0.8φ时n=1517 r/minn 0=UNnN/0.8Keφ=1964 r/min3.11 电动接接入电网并施加额定电压时, 启动电流将很大.I st =U N /R a3.12 他励直流电动机直接启动过程中有哪些要求?如何实现?他励直流电动机直接启动过程中的要求是 1 启动电 流不要过大,2 不要有过大的转矩.可以通过两种方 法来实现电动机的启动一 是降压启动 .二是在电枢 回路内串接外加电阻启动.3.13 直流他励电动机启动时,为什么一定要先把励磁电流加上?若忘了先合励磁绕阻的电源开关就把电枢 电源接通,这是会产生什么现象(试从 T L =0 和 T L =T N 两种情况加以分析)?当电动机运行在额定转速下, 若突然将励磁绕阻断开,此时又将出现什么情况? 直流他励电动机启动时,一定要先把励磁电流加上 使因为主磁极靠外电源产生磁场.如果忘了先合励磁 绕阻的电源开关就把电枢电源接通,T L =0 时理论上电 动机转速将趋近于无限大,引起飞车, T L =T N 时将使电 动机电流大大增加而严重过载. 3.14 直流串励电动机能否空载运行?为什么?串励电动机决不能空载运行,因为这时电动机转速极 高,所产生的离心力足以将绕组元件甩到槽外,还可 能串励电动机也可能反转运行.但不能用改变电源极12性的方法,因这时电枢电流 Ia 与磁通φ同时反响,使 电瓷转矩 T 依然保持原来方向,则电动机不可能反 转.3.15 一 台 直 流 他 励 电 动 机 , 其 额 定 数 据 如 下 :P N =2.2KW,U N =U f =110V,n N =1500r/min,ηN=0.8,R a =0.4Ω, R f =82.7Ω 。