精密数控脉冲延时电路的设计
基于PWM的精密数控电源设计

基于PWM的精密数控电源设计发表时间:2018-11-02T17:19:29.560Z 来源:《知识-力量》2018年12月上作者:刘景文[导读] 设计以FPGA为控制核心的精密数控电源,通过硬件设计和参数计算,设计基于Verilog HDL相关程序,完成基于PWM的精密数控电源设计,通过调节PWM占空比实现输出电压的精密调节,调节精度达0.011V,具有一定的实用价值。
关键词:(天津滨海职业学院,天津塘沽 300451)摘要:设计以FPGA为控制核心的精密数控电源,通过硬件设计和参数计算,设计基于Verilog HDL相关程序,完成基于PWM的精密数控电源设计,通过调节PWM占空比实现输出电压的精密调节,调节精度达0.011V,具有一定的实用价值。
关键词:PWM;鼠标滚轮编码器;二阶RC滤波器一、引言做为电子领域常用的设备,直流稳压电源在教学、科研等领域广泛应用。
传统的多功能直流稳压电源功能简单、精度低且体积大、复杂度高。
精密数控电源精度高、输出电压调节方便已经替代传统电源,在教学、科研等领域广泛使用。
精密数控电源广泛以单片机为控制核心,通过控制D/A电路、经集成运放转换为数控电压,最后由三极管放大、RC网络滤波,最终得到稳定数控电压。
为单片机核心的精密数控电源,电路功能模块化,设计简单,结构紧凑,价格适中,性能卓越。
本文提出基于PWM的精密数控电源,以FPGA/CPLD为控制核心,通过控制PWM占空比,信号经RC滤波器滤波,转换为稳定数控电压,最后由三极管进行电流放大得到稳定数控电压。
本设计结构非常简单,价格便宜,调节精度高。
二、系统硬件设计与参数计算基于PWM的精密数控电源系统的硬件由输出电压调节、二阶RC滤波器、三极管电流放大、A/D电压采集、数码显示五部分组成。
采用altera公司的EPF10K10LC84为控制核心,使用40MHZ时钟频率,VCCIO电压取5V。
(一)、输出电压调节部分设计与参数选择输出电压调节部分采用鼠标滚轮编码器,鼠标滚轮编码器本质是两个开关,在旋转的过程中,两个开关依次闭合,编码器产生A、B两路脉冲。
基于现场可编程门阵列的数控延时器的设计
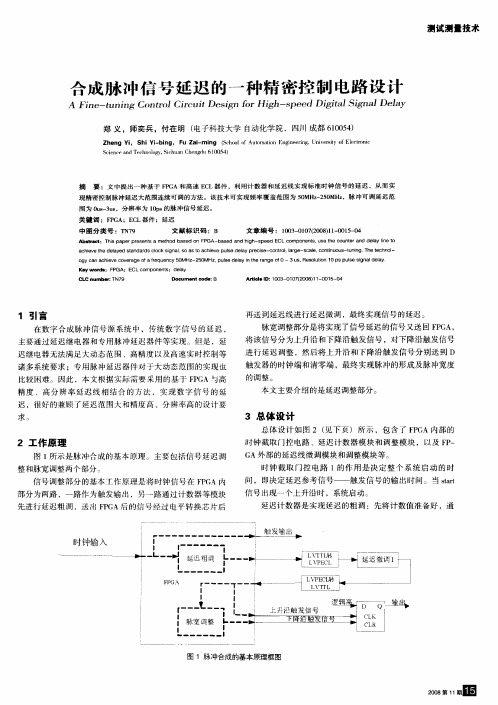
基于现场可编程门阵列的数控延时器的设计利用硬件描述语言结合可编程规律器件(PLD)可以极大地便利数字的设计,本文介绍一种利用硬件描述语言结合现场可编程门阵列()设计的数控延时器,延时器在时钟clk的作用下,从8位数据线输入延时量,到LATCH高电平常锁存数据,可以实现对触发脉冲TRIG的随意量的延时。
因为延时范围不同,设计所用到的FPGA的资源也不同,本文具体介绍最大延时量小于触发脉冲周期的状况。
该延时器的软件编程和调试均在MuxplusⅡ环境下完成,系统设计选用公司的EPFl0K30AQC208-3,EPCI44l型专用,与相结合,应用于雷达目标模拟器的控制部分,实现对目标距离的模拟。
2 设计原理
笔者设计的数控延时器采纳3个串联计数器来实现。
因为在触发脉冲TRIG的升高沿开头延时,用法时钟的升高沿计数,考虑到VHDL对时钟描述的限制,设计采纳计数器l产生同步脉冲SYNC,宽度为Tclk,利用SYNC的高电平触发cflag,并在延时结束后cflag清零;计数器2计算延时的长度;计数器3计算所要产生的输出脉冲OUTPUT的脉宽,并在计数结束时对计数器2和计数器3清零。
延时器的外部接口电路1所示,原理框图2所示。
囫囵电路的设计采纳同步时钟计数以尽量削减因局部时钟不稳定所产生的毛刺和竞争冒险。
该数控延时器低电平常锁存数据,高电平常转变内部寄存器的数值(与AD9501型数控延时器的数据锁存端电平相反)。
普通状况下,触发脉冲与时钟的升高沿是全都的,假如输入的触发脉冲与时钟不全都,则囫囵电路的延时将产生一定的误差。
时序3所示,延时量由dlyLH为高电平常数据data8上的数据打算。
第1页共4页。
FPGA的数字脉冲延时发生器设计

敬请登录网站在线投稿(t o u g a o.m e s n e t.c o m.c n)2021年第2期79F PG A的数字脉冲延时发生器设计陈泽洋(天津大学理学院,天津300072)摘要:本文主要介绍了一种数字式脉冲延时发生器的设计方法,该方案是基于A l t e r a(被I n t e l收购)的C y c l o n e I V系列F P G A实现的,为了同时满足高延时分辨率与大的可调范围,采用了粗细结合的延时方法,粗延时通过计数器法实现,细延时通过A D9501专用延时芯片实现;为了让用户与系统进行通信,在F P G A内部构建了N i o s I I软核处理器,并且编写软件程序实现人机交互㊂对系统的关键模块进行了仿真,仿真结果显示模块设计符合需求,最终延时系统可以实现精度为16.5p s㊁可调范围约为1.1s的延时㊂关键词:F P G A;A D9501;延脉冲发生时器;N i o s I I中图分类号:T N7文献标识码:AD e s i g n o f D i g i t a l P u l s e D e l a y G e n e r a t o r B a s e d o n F P G AC h e n Z e y a n g(S c h o o l o f S c i e n c e,T i a n j i n U n i v e r s i t y,T i a n j i n300072,C h i n a)A b s t r a c t:I n t h e p a p e r,a d e s i g n m e t h o d o f d i g i t a l p u l s e d e l a y g e n e r a t o r i s d e s i g n e d,w h i c h i s b a s e d o n A l t e r a's c y c l o n e I V s e r i e s F P G A.I n o r d e r t o m e e t t h e r e q u i r e m e n t s o f h i g h d e l a y r e s o l u t i o n a n d l a r g e a d j u s t a b l e r a n g e,c o m b i n e t h e c o a r s e d e l a y a n d f i n e d e l a y,t h e c o a r s e d e-l a y i s r e a l i z e d b y c o u n t e r m e t h o d,a n d t h e f i n e d e l a y i s r e a l i z e d b y A D9501s p e c i a l d e l a y c h i p.I n o r d e r t o e n a b l e u s e r s t o c o mm u n i c a t e w i t h t h e s y s t e m,N i o s I I s o f t c o r e p r o c e s s o r i s b u i l t i n F P G A,a n d s o f t w a r e p r o g r a m i s w r i t t e n t o r e a l i z e h u m a n-c o m p u t e r i n t e r a c t i o n.T h e k e y m o d u l e s o f t h e s y s t e m a r e s i m u l a t e d,a n d t h e s i m u l a t i o n r e s u l t s s h o w t h a t t h e m o d u l e d e s i g n m e e t s t h e r e q u i r e m e n t s.T h e f i n a l d e l a y s y s t e m c a n a c h i e v e a d e l a y a c c u r a c y o f16.5p s a n d a d y n a m i c r a n g e o f1.1s.K e y w o r d s:F P G A;A D9501;p u l s e d e l a y g e n e r a t o r;N i o s I I0引言脉冲延时发生器作为一种时序同步装置在激光系统[1-2]㊁雷达系统[3]㊁飞行时间质谱仪[4-5]等领域应用广泛,它可以对触发信号进行延时后输出脉冲信号,用户可以设定延时的大小㊂延时的分辨率与延时的可调范围是衡量其性能的两个重要参数,可以实现脉冲延时的方法有计数器法㊁存储器法[6]㊁专用延时芯片[7]等方法㊂计数器法与存储器法可以实现可调范围比较大的延时,不过延时精度由于受到时钟频率的限制只能做到纳秒量级,专用延时芯片法的延时精度可以做到皮秒量级,不过可调范围在微秒量级㊂F P G A是一种可编程逻辑器件,用户可以通过V e r i l o g H D L等设计文件在F P G A内部设计所需要的逻辑电路,与A S I C相比具有设计周期短㊁设计灵活等优点㊂本文介绍的延时脉冲发生器以A l t e r a(被I n t e l收购)的C y c l o n e I V系列F P G A为核心,采用粗细结合的延时方案,并且利用N i o s I I软核处理器用于系统控制,实现了脉冲延时发生器的设计㊂1基于F P G A的脉冲延时发生器整体设计延时系统的工作模式分为内触发模式与外触发模式㊂系统的设计框图如图1所示㊂工作在内触发模式时,触发信号由系统内部产生,用户可以设定触发信号的频率大小㊂工作在外触发模式时,触发信号由外部提供㊂整个延时系统的延时由粗延时部分和细延时部分组成,粗延时利用计数器法实现㊂计数器法的延时分辨率由采样时钟决定,本系统的采样时钟通过将外部50MH z晶振倍频得到,最终倍频数由系统能运行的最大时钟频率决定㊂细延时是利用A D9501实现的,A D9501通过8位控制字对单位粗延时进一步细分,得到16.5p s延时分辨率㊂P C机通过C P2102串口桥接芯片将设定的延时信息发送给N i o s I I软核处理器,延时信息包含用户设定的粗延时以及细延时,N i o s I I将粗延时信息经由P I O I P核传递到粗延时模块,细延时信息被转换成8位控制字,输出80M i c r o c o n t r o l l e r s &E m b e d d e d S ys t e m s 2021年第2期w w w .m e s n e t .c o m .c n图1 脉冲延时发生器的整体设计框图到A D 9501对其细延时进行控制㊂触发信号依次经过粗延时模块与A D 9501模块最终实现脉冲延时㊂其中内触发源模块㊁粗延时模块㊁N i o s I I 模块是在一块F P G A 内部㊂2 内触发源模块设计内触发源模块的作用是在内触发模式下提供触发信号㊂该模块的时序图如图2所示㊂图2 内触发源模块时序图c l k 为输入模块的时钟信号,d i v 为用户设定的分频数,c o u n t e r 为对时钟信号进行计数的计数器,o u t p u t 为最终输出的触发信号㊂当时钟信号到来时,启动计数器对时钟信号进行计数㊂当计数器计数的值等于d i v 时,将输出信号取反,同时计数器置零;当计数器的值不等于分频数时,输出保持不变,计数器持续对时钟信号进行计数㊂用户通过设置d i v 的值改变计数器的计数值,进而控制输出信号的跳变,从而达到对时钟信号进行分频的目的㊂3 粗延时模块设计粗延时模块负责对外部触发信号进行粗略延时,然后将延时后的脉冲输出到A D 9501进行细延时㊂该模块由输入时钟信号c l k ㊁触发信号t r i ㊁两个计数器p u l s e 1和pu l s e 2㊁两个计数器c o u n t e r 1和c o u n t e r 2组成㊂A D 9501的内部有一个斜波发生器,每次触发信号到来之后斜波发生器电压从0开始上升,当斜波发生器电压值与D A C 设定值相等时,拉高延时输出引脚电平,该斜波电压的置零是通过复位引脚实现的,拉复位引脚时,斜波发生器进行复位,如果不对其进行复位,则当下一个脉冲到来时,斜波发生器的电压是大于D A C 电压的,延时输出一直处于高电平状态,所以不能输出延时脉冲㊂由此可知,粗延时模块应该输出两个脉冲给A D 9501,分别为pu l s e 1和p u l s e 2,一个用于触发细延时,另一个用于将A D 9501斜波发生器置零㊂通过设定p u l s e 1与p u l s e 2之间的时间间隔就可以控制延时脉冲的脉宽大小㊂c o u n t -e r 1和c o u n t e r 2分别是延时计数器和脉宽计数器,通过延时控制字d e l a y 和脉宽控制字w i d t h 控制计数器计数到多少时输出脉冲信号,该模块的时序如图3所示㊂经过实验得知粗延时模块能够运行的最大时钟为240MH z,则粗延时分辨率为1/240MH z =4.2n s ,c o u n t e r 的位数设为28位,则最大延时为4.2n s ˑ228ʈ1.1s㊂图3 粗延时模块时序图4 细延时模块设计细延时模块是以A D 9501为核心实现的,它是在粗延时的分辨率基础上进一步细分实现更高分辨率的延时,A D 9501通过8位控制字对4.2n s 进行细分,则细分后的延时分辨率为4.2n s /28-1=16.5n s ㊂A D 9501的最小延迟(t P D )是触发电路延迟㊁斜坡发生器延迟和比较器延迟的总和㊂触发电路延迟和比较器延迟是固定的,斜坡发生器延迟是受线性斜坡变化率和偏移电压值影响的㊂最大延迟是t P D 和满量程(t D F S )的总和㊂斜坡发生器延迟是斜坡从其重置电压转换到D A C 电压所需的时间,D A C 电压由用户通过数字输入进行编程㊂满量程延迟(t D F S )由电容C e x t 和电阻R s e t 决定,范围为2.5n s ~10μs ,它们的关系如下:t D F S =R s e t ˑ(C e x t +8.5p F )ˑ3.84当满量程延时小于等于326n s 时,接C e x t 的引脚应当悬空;当满量程延时超过326n s 时,C e x t 引脚与电源之间可以最大加500p F 的电容㊂R s e t 的取值范围为50Ω~10k Ω㊂本设计想要实现满量程4.2n s 的延时,R s e t 大小应设置为128Ω,接C e x t 的引脚悬空㊂5 N i o s I I 控制模块设计从经济与系统复杂程度方面考虑,选用N i o s I I 软核处理器来实现P C 机对于系统的控制㊂N i o s I I 需要实现的功能为从P C 接收用户设定的延时值,然后将延时值发送给延时模块㊂利用Q s ys 自带I P 核可以实现加速设计,敬请登录网站在线投稿(t o u ga o .m e s n e t .c o m.c n )2021年第2期81图4 控制模块程序流程图实现数据接收与传输所需添加的主要I P 核有U A R T 与P I O ㊂P C 通过C P 2102将数据发送到U A R T I P 核的读寄存器,U A R T I P 核的r x d a t a寄存器接收到数据,使能读取中断,并将读取的数据在中断服务子程序中赋值给P I O ,就实现了P C 对延时系统的控制,图4为控制模块的程序流程图㊂6 关键模块仿真结果本设计的两个关键模块为内触发源模块与粗延时模块,编写测试文件对两个模块分别进行仿真,内触发源模块的仿真结果如图5所示㊂图5中信号从上到下依次是时钟信号c l k㊁复位信号r s t ㊁分频数d i v ㊁计数器c o u n t e r ㊁输出信号o u t ㊂可以看出,当分频数依次为0㊁1㊁2㊁3时,输出信号o u t 分别经过1个时钟周期㊁2个时钟周期㊁3个时钟周期㊁4个时钟周期发生电平的跳变,因此仿真结果表明,可以通过分频控制字d i v 来控制输出信号的分频数㊂粗延时模块的仿真结果如图6所示㊂图中信号从上到下依次是时钟信号c l k ㊁复位信号r s t ㊁触发信号t r㊁延时计数器c o u n t ㊁脉宽计数器c o u n t 1㊁延时控制字d e l a y㊁脉宽控制字w i d t h ㊁延时脉冲信号p u l s e 1㊁脉宽控制信号pu l s e 2㊂从仿真结果可以看出,当延时控制字为13㊁脉宽控制字为4时,触发信号到来之后的13个时钟信号输出p u l s e 1,pu l s e 1之后4个时钟信号输出p u l s e 2,该模块的设计符合需求㊂图5内触发源模块仿真结果图6 粗延时模块仿真结果7 性能比较将计数器法㊁专用延时芯片法㊁本设计的方法从可调范围㊁延时分辨率㊁功能扩展三个方面进行比较,结果如表1所列㊂表1 三种延时方法比较延时方法可调范围延时分辨率功能扩展计数器法m s ,s 量级n s 量级无法功能扩展专用延时芯片μs 量级ps 量级无法功能扩展本设计s 量级ps 量级便于功能扩展由表1中可知,本设计方法在保持计数器法与专用延时芯片方法优点的同时弥补了两种方法各自的不足,并且基于F P G A 灵活的特点,可以通过设计逻辑电路与编写N i o s I I 软核模块程序进行再次开发,以满足其他系统集成或者功能升级的需求㊂8 结 语目前国内的商用脉冲延时发生器主要依赖国外进口,价格一般在几万元到十几万元不等,价格昂贵并且性价比不高,本设计的脉冲延时发生器在满足高精度与大的可调范围的同时,成本方面也有很大的优势,整个系统制作成本仅为400元左右㊂在当今环境下,自主设计的脉冲延时发生器在商业与科技领域均具有重要意义㊂参考文献[1]蒋军敏,刘进元,刘百玉,等.用于激光打靶装置中的85敬请登录网站在线投稿(t o u ga o .m e s n e t .c o m.c n )2021年第2期85节的非线性特性耗费时间,无论系统的非线性多严重,均能按特定的关系进行转换㊂经数值分析将优化后的数据代入式(1)及联立式(1)和式(7),线性补偿前后物体位移y 和像点位移x 的关系如图6所示㊂y =270192x14216.256-398.32x+e d(8)图6 线性补偿前后物体位移y 和像点位移x 的关系5 结 语本文从反射式激光三角法测量原理公式㊁测量范围㊁分辨率及结构参数优化出发,用工程软件MA T L A B 对系统的各个参数之间的约束关系进行了分析与优化,使得参数优化过程得以简化,同时在实际中可根据器件因素和测量范围的要求不同随时改变,提高了设计的灵活性,降低了设计初期的费用,最后通过数值分析了造成物体位移与像点位移呈非线性的原因,并用线性补偿的方法使物体位移与像点位移线性输出,从而提高了测距传感器线性度与精度,降低了系统误差,实现了高精度大位移的测量㊂参考文献[1]王晓嘉,高隽,王磊.激光三角法综述[J ].仪器仪表学报,2004(S 2):601604,608.[2]L a r s L i n d n e r ,O l e g S e r g i y e n k o ,J u l i o C R o d r ígu e z Q u i ño n e z ,e t a l .M o b i l e r o b o t v i s i o n s y s t e m u s i n g c o n t i n u o u s l a s e r s c a n n i n gf o r i n d u s t r i a l a p pl i c a t i o n [J ].T h e I n d u s t r i a l R o b o t ,2016,43(4):360369.[3]S u Z h i q i ,H e Q i n g,X i e Z h i .I n d i r e c t m e a s u r e m e n t o f m o l t e n s t e e l l e v e l i n t u n d i s h b a s e d o n l a s e r t r i a n g u l a t i o n [J ].T h e R e -v i e w o f s c i e n t i f i c i n s t r u m e n t s ,2016,87(3):035117.[4]宋腾,张凤生,任锦霞.直射式激光位移传感器光束入射角对测量精度的影响[J ].机械,2017,44(2):3741.[5]Z h u a n g B H.N o n c o n t a c t m e a s u r e m e n t o f s c r a t c h o n a i r c r a f t s k i n s [J ].A p p l i e d l a s e r ,1997(2):4936.[6]任伟明,孙培懋,王亚雷,等.一种标定三角测量法激光位移计的方法[J ].光学技术,1997(3):1113,16.[7]赵景海,孙飞显.基于残差补偿的激光位移传感器测距方法[J ].计算机工程,2018,44(10):298302.[8]曹红超,陈磊,王波,等.一种改进型高精度激光三角位移传感器的结构设计研究[J ].激光杂志,2007(6):1415.[9]X u e l i H a o ,A i m i n S h a ,Z h a o yu n S u n ,e t a l .L a s e r b a s e d m e a s u r i n g m e t h o d f o r m e a n j o i n t f a u l t i n g va l u e o f c o n c r e t e p a v e m e n t [J ].O p t i k I n t e r n a t i o n a l J o u r n a l f o r L i gh t a n d E -l e c t r o n O pt i c s ,2016,127(1):274278.[10]胡纪五,史雪飞.仪表线性化优化设计[J ].电测与仪表,2000(2):58.[11]卢治功,贺鹏,职连杰,等.基于最小二乘法多项式拟合三角测量模型研究[J ].应用光学,2019,40(5):853858.[12]姜庆胜,计时鸣,张利.基于计算机视觉的机械零件平面曲线检测和识别研究[J ].机电工程,2005(7):47.樊鹏辉(硕士研究生),主要研究方向为传感器技术;杨光永(副教授),主要研究方向为传感器技术㊁机器人技术;程满(硕士研究生),主要研究方向为A G V 路径规划;刘叶(硕士研究生),主要研究方向为电机控制;徐天奇(教授),主要研究方向为传感器技术㊁自动化㊂(责任编辑:薛士然 收稿日期:2020-09-11) 新型同步系统的研究[J ].光子学报,2002(3):381383.[2]D T i a n ,G Y a n g .D e s i g n a n d d e v e l o p m e n t o f a m i n i a t u r e d i gi t a l d e l a y g e n e r a t o r f o r l a s e r i n d u c e d b r e a k d o w n s p e c t r o s c o p y[J ].I n s t r u m e n t a t i o n s c i e n c e &t e c h n o l o g y,2015(43):115124.[3]S Z h a o l i n ,L N a n ,W Y i n a n .H i g h r e s o l u t i o n p r o gr a mm a b l e d i g i t a l d e l a y g e n e r a t o r d e s i gn a n d r e a l i z a t i o n [C ]//2010I n -t e r n a t i o n a l C o n f e r e n c e o n I n t e l l i g e n t S y s t e m D e s i gn a n d E n -g i n e e r i n g A p p l i c a t i o n I E E E C o m p u t e r S o c i e t y,2010.[4]C L F e n g ,L G a o ,J H L i u .L a s e r m a s s s p e c t r o m e t r yf o r o n -l i n e d i ag n o s i s o f r e a c t i v e p l a s m a s w i th m a n y s p e ci e s [J ].R e -v i e w o f S c i e n t i f i c I n s t r u m e n t s ,2011(6):261434.[5]S V K o v t o u n ,R D E n gl i s h ,R J C o t t e r .M a s s c o r r e l a t e d a c c e l -e r a t i o n i n a r e f l e c t r o n MA L D I T O F m a s s s pe c t r o m e t e r :A n a p p r o a c hf o r e n h a n c e d r e s o l u t i o n o v e r a b r o a d m a s s r a ng e [J ].J o u r n a l o f th e A m e ri c a n S o c i e t y f o r M a s s S p e c t r o m e t r y,2002(13):135143.[6]邱有刚,黄建国,李力.基于F P G A 数字延迟单元的实现和比较[J ].电子测量技术,2011,34(9):6568.[7]马艳喜.数字延时器A D 9501的性能及其应用[J ].电子元器件应用,2002,4(11):2728.陈泽洋,主要研究方向为快点子学与离子光学㊂(责任编辑:薛士然 收稿日期:2020-08-19)。
数控机床电气控制电路设计实例

电压继电器的输入量是电路电压的大小,它根据输入电压的大 小而动作。与电流继电器类似,电压继电器也分为欠电压继电器和 过电压继电器两种。
四、时间继电器 时间继电器在控制电路中用于时间的控制。
按其动作原理可分为电磁式、空气阻尼式、电动式和电子式等; 按延时方式可分为通电延时型和断电延时型。
而且要求刀具由一点到另一点之间的运动轨迹为一条直线,并能控 制位移的速度。 (3)轮廓控制系统
也称连续控制系统。其特点是能够同时对两个或两个以上的坐 标轴进行连续控制。
2. 按伺服系统控制方式分类 (1)开环伺服系统
数控装置根据信息载体上的指令信号,经控制运算发出指令脉
冲,使伺服驱动元件转过一定的角度,并通过传动齿轮、滚珠丝杠 螺母副,使执行机构(如工作台)移动或转动。 (2)闭环伺服系统
4. 按功能水平分类 (1)经济型数控系统(又称简易数控系统) 这一类型的数控系统一般为开环控制,采用的CPU为单板机或单片 机,用数码管显示或单色小液晶显示或CRT字符显示。 (2)普及型数控系统(又称全功能数控系统) 这类系统一般为半闭环控制,采用16位或32位CPU,9 in(228 6mm)单色显示器(1 in=25 4mm)。 (3)高性能数控系统 这类系统一般为全闭环控制,采用的微型计算机为32位以上的CPU, 显示器为彩色CRT或TFT液晶显示器.内存大于150 KB。
从第一台数控机床问世到现在的50多年中,数控技术的发展非 常迅速,集计算机技术、现代控制技术、微电子技术、传感检测技 术、信息处理技术、网络通信技术、液压气动技术、光电子技术以 及传统的机械制造技术为一体,得到了广泛的应用,在数控机床是 关系到国家战略地位和体现国家综合国力水平的重要基础性产业, 其水平高低和拥有量多少是衡量一个国家工业现代化的重要标志, 在国防建设上亦具有重要的战略意义。
自制精密数控电源

以前08年的时候,我自制了第一台数控电源,当时这台电源比较简陋,用的是M8输出两路PWM进行二阶积分作为基准电压,OP07运放作为控制器,输入用的4x4矩阵键盘,电路板用的热转印自制的。
以前用热转印做的主控板正面反面,送香水太多比较恶心整体外观内部,调整管质量不错,用的正品的3DD9D纪念一下,已经被我拆掉了,2008-10-4月完工的虽然对于以前我用的电源来说是一个跨时代的东西,但是问题存在不少。
1、电压不精确,漂移严重,原因是当时图方便无经验取样电阻用的一个多圈电位器直接进行分压,本身温漂就大。
2、结构设计缺陷,散热器是被动散热,内部温度高,导致温漂更加厉害3、PWM二阶积分做基准本身就不太精确,M8内置AD(10bit)分辨率也不够4、机壳用的原有电源机壳,老旧体积大不美观,矩阵按键手感不好5、当时编程水平有限,程序用了大量延时函数,按键程序优化不好,造成按键反映慢6、设计经验不足,电路设计有些小缺陷。
虽然后面我准备用开关电源做一台双路的,当时用光耦隔离通讯都搞定了,这台电源设计思路很先进,用的KIC-125开关模块进行跟随一级降压,第二级用传统的线性稳压,第一次自制了风道散热器效果不错,这次都是用的这台散热器。
最后因为模拟电路的一些设计缺陷以及有些元器件故障而夭折,废了不少功夫,可惜。
上个图:首先引入了模块化设计的经验用了光耦对MCU板和模拟板进行全隔离数据通讯,AD输入和DA输出都是全隔离内部一览,用了风道散热器和开关电源外部图,用的1604液晶屏和USB通讯口这两个电源虽然没有成功,但是为这次的电源积累了经验,现在这台电源我吸取了这两台电源的设计教训,全面重新设计,整个电源从设计到完工,历时2个月,其间总的来说一番风顺,但是也出了一些小波折。
首先,这次这台电源的设计思路是输出电压电流精确,温度漂移小,纹波小,操作方便人性化,界面简洁高效,散热好。
这次还是准备做一台纯线性的电源,毕竟是桌面实验用电源,体积虽然要求小,但也不是很极端,而且纹波干扰也好控制。
一种高精度可延时同步脉冲产生系统
182收稿日期:2018-06-18作者简介:李军(1980—),男,山西长治人,硕士,工程师,研究方向:电子对抗。
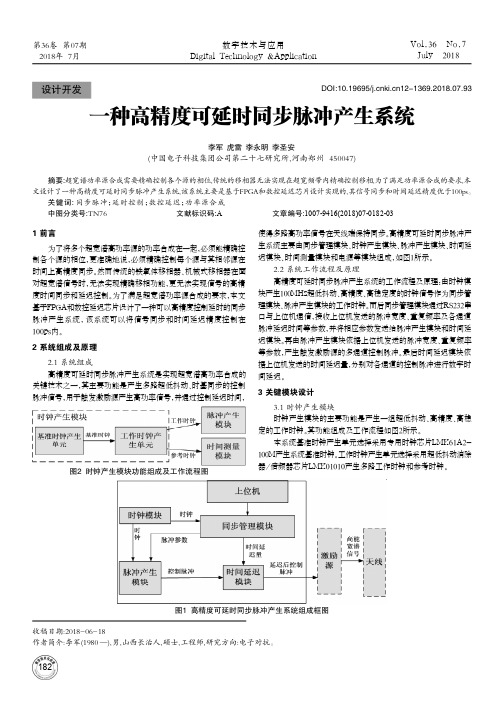
图1 高精度可延时同步脉冲产生系统组成框图图2 时钟产生模块功能组成及工作流程图1 前言为了将多个超宽谱高功率源的功率合成在一起,必须能精确控制各个源的相位,更准确地说,必须精确控制每个源与其相邻源在时间上高精度同步。
然而传统的铁氧体移相器、机械式移相器在面对超宽谱信号时,无法实现精确移相功能,更无法实现信号的高精度时间同步和延迟控制。
为了满足超宽谱功率源合成的要求,本文基于FPGA和数控延迟芯片设计了一种可以高精度控制延时的同步脉冲产生系统,该系统可以将信号同步和时间延迟精度控制在100ps内。
2 系统组成及原理2.1 系统组成高精度可延时同步脉冲产生系统是实现超宽谱高功率合成的关键技术之一,其主要功能是产生多路超低抖动、时基同步的控制脉冲信号,用于触发激励源产生高功率信号,并通过控制延迟时间,使得多路高功率信号在天线端保持同步。
高精度可延时同步脉冲产生系统主要由同步管理模块、时钟产生模块、脉冲产生模块、时间延迟模块、时间测量模块和电源等模块组成,如图1所示。
2.2 系统工作流程及原理高精度可延时同步脉冲产生系统的工作流程及原理:由时钟模块产生100MHz超低抖动、高精度、高稳定度的时钟信号作为同步管理模块、脉冲产生模块的工作时钟。
而后同步管理模块通过RS232串口与上位机通信,接收上位机发送的脉冲宽度、重复频率及各通道脉冲延迟时间等参数,并将相应参数发送给脉冲产生模块和时间延迟模块。
再由脉冲产生模块依据上位机发送的脉冲宽度、重复频率等参数,产生触发激励源的多通道控制脉冲。
最后时间延迟模块依据上位机发送的时间延迟量,分别对各通道的控制脉冲进行数字时间延迟。
3 关键模块设计3.1 时钟产生模块时钟产生模块的主要功能是产生一组超低抖动、高精度、高稳定的工作时钟。
其功能组成及工作流程如图2所示。
高速、高精度脉冲延迟电路设计与应用
s e d dgi l t t y t m , n e t c n l g fp le d l yc l r t . p e i t C al es s e s a d t e h o o yo us e a a l a e h b
Key or w ds: Gat contolosciat : ogr m m abl del ECL: e r l or Pr l a e ay: Cal at i br i on
CLC num b : erTM9 5 3 3 .7
Docum en t cod A e:
Ar I 囊 I 1 0 — 1 7 2 0 03 0 4 - 3 t cI D: 3 0 f 0 8) — 0 5 0 0 0
1 引言 .
高 速 数 字 芯 片 测 试 系 统 是 一 ห้องสมุดไป่ตู้ 高 性 能 、 高 速 大 规 模 数 字 I 测 C
2. 速 数 字 I 测 试 系 统 中 的 定 高 C
时设 计 要 求
高 速 数 字 I C测 试 系 统 的 设 计
目 标 是 能 够 实 现 工 作 频 率 为 10 kHz
~
路 。
2 6 2 O b S 高 速测试 管 脚,4 5 个 0 M p 的 个 独 立 的 时 钟 驱 动 管 脚 , 6 可 编 路
摘
要 : 章 简 述 了 基 于 门 控 振 荡 器 的 高 精 度 脉 冲 延 迟 调 节 与 时 钟 再 生 电路 工 作 原 理 。 电 路 文
设 计 和实现 方法 , 以及在 高速 数字 集成 电路测 试 系统 中的应 用和延 迟精 度校 准方 法 。
关 键 词 : 控 振 荡 器 ; 编 程 延 迟 ;C 校 准 门 可 E L; 中 图 分 类 号 :H 3 .7 Tg 53 文 献 标 示 码 : A 文 章编 号 :03 00 20 )30 4— 3 1 0 - 1 7(0 8 0 - 0 5 0
一种精密数控开关电源的设计
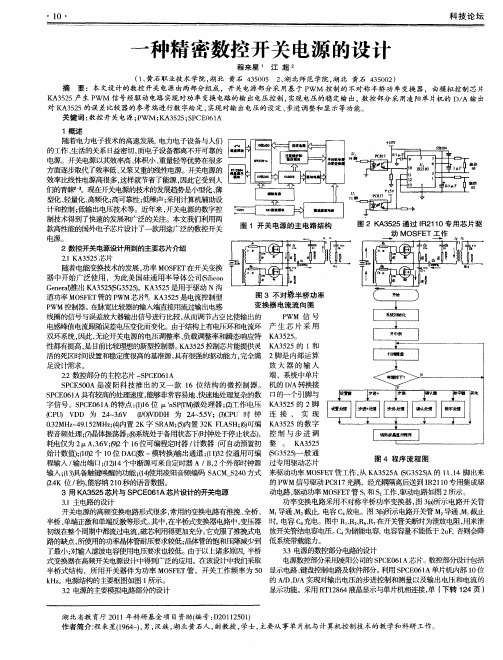
始计数值)1)个 1 位 D c数 一 ;0 (2 0 A ( 模转换瀚 出通道; 2 (1 位通用可编 1) 3 程输入 / 输出端 口; 2 4个中断源可来 自定时器 A/ , 个外部时钟源 () 11 B2 SE 从 A 55 S 5 ̄ G 1 1 输入 ;3 () 1具备触鼬唤 醒的功能 ;4 用凌阳音频编码 S C _20 ( 暇- 1 A M S4 方式 来驱动功率 MO F T管工作 , K 3 2A ( 32 的 1 、4脚出来 (4 2 K位 / , . 秒) 能容纳 2 0 1 秒的语音数据。 的P WM信号驱动 P 87 C 1 光耦 ,经光耦隔离后送到 I 2 1 专用集成驱 R 10
湖 北 省教 育厅 2 1 年 科 研 基金 项 目资助 ( 号 : 2 120 ) 01 编 D 0 15 1
作者简介: 程来星(9 4 )男, 16一 , 汉族 , 湖北黄石人 , 副教授 , 学士 , 主要从事单片机与计算机控 制技术的教学和科研 工作 。
・
l4 2・
管 理 科 学
・
1 ・ 0
科 技 论 坛
一
种精 密数控开关 电源 的设计
程 来 星 江 超 2
(、 1 黄石职业技 术学院, 湖北 黄石 45 0 2 湖北师范学院 , 3 05 、 湖北 黄石 4 50 ) 3 0 2 摘 要 :本 文设 计 的 数控 开 关 电源 由两部 分组 成 ,开 关 电 源部 分 采 用 基 于 P WM 控 制 的 不 对 称 半 桥 功 率 变换 器 , 由模 拟控 制 芯 片 K 32 A 55产生 P WM 信号经驱动 电路 实现对功率 变换 电路 的输 出电压控制 , 实现电压 的稳定输 出。数控部分采用凌 阳单 片机的 D/ A输 出 对 K 32 A 55的误差比较 器的参考端进行数 字给定, 实现对输 出电压的设定、 步进调 整和显示等功能。 关 键词 : 控 开 关 电 源 ;W M ; A32 :P E 6 A 数 P K 5 5S C 0 1
合成脉冲信号延迟的一种精密控制电路设计
a he h ly d sa a dsclc i a . o ast c iv u s l e ie-c n r 1 a ge c l c tn e s u ig e t h ol c ivet e dea e t nd r o k sgn 1s o a he e p le deaypr c s o to.1r -s ae.  ̄ i u —t nn Th ec n — o y c che e c v r ge o r qu n y 5 M Hz 50 Hz pus ely i g f0 — 3 u 。R olt n 1 le sgn l ly g a a iv o e a fafe e c 0 n  ̄2 M . le d a t r n he an e o s es u i 0 pspus i a a o de K eyw o d r s: F PGA ; E Lco p ne t C m o n s;de a ly
关 键 词 :F G P A;E L器件 ;延迟 C
中 圈 分 类 号 :T ? N9
Ab H s
文 献 标 识 码 :B
文 章 编 号 : 10 — 17 0 81—o5 o 0 3 00( 0)l0 l一 4 2
: T s p pe e e t hi a rpr s n s a metod ba e n F h s d o PGA—ba e n i -s e s d a d hgh p ed ECL c m p en s u e t e C n e n ely l e t o on t . s h ou t ra d d a n i o
测试测量 技术
合 成 脉 冲 信 号 延 迟 的 一 种 精 密 控 制 电 路 设 计
A ne —u n Co r lCic i e i n f rH i h-s e i ia g lD e a Fi —t ni g nto r u t D s g o g pe d D g tlSi na ly
基于Flash FPGA器件实现脉冲延迟控制系统的设计
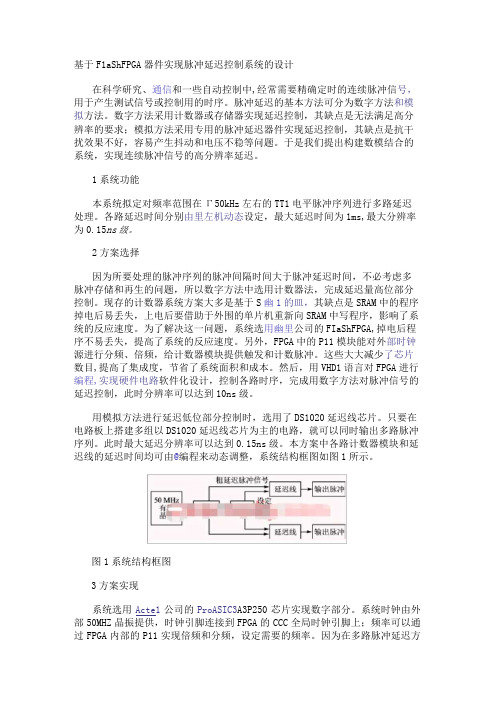
基于F1aShFPGA器件实现脉冲延迟控制系统的设计在科学研究、通信和一些自动控制中,经常需要精确定时的连续脉冲信号,用于产生测试信号或控制用的时序。
脉冲延迟的基本方法可分为数字方法和模拟方法。
数字方法采用计数器或存储器实现延迟控制,其缺点是无法满足高分辨率的要求;模拟方法采用专用的脉冲延迟器件实现延迟控制,其缺点是抗干扰效果不好,容易产生抖动和电压不稳等问题。
于是我们提出构建数模结合的系统,实现连续脉冲信号的高分辨率延迟。
1系统功能本系统拟定对频率范围在Γ50kHz左右的TT1电平脉冲序列进行多路延迟处理。
各路延迟时间分别由里左机动态设定,最大延迟时间为1ms,最大分辨率为0.15ns级。
2方案选择因为所要处理的脉冲序列的脉冲间隔时间大于脉冲延迟时间,不必考虑多脉冲存储和再生的问题,所以数字方法中选用计数器法,完成延迟量高位部分控制。
现存的计数器系统方案大多是基于S幽1的皿,其缺点是SRAM中的程序掉电后易丢失,上电后要借助于外围的单片机重新向SRAM中写程序,影响了系统的反应速度。
为了解决这一问题,系统选用幽里公司的FIaShFPGA,掉电后程序不易丢失,提高了系统的反应速度。
另外,FPGA中的P11模块能对外部时钟源进行分频、倍频,给计数器模块提供触发和计数脉冲。
这些大大减少了芯片数目,提高了集成度,节省了系统面积和成本。
然后,用VHD1语言对FPGA进行编程,实现硬件电路软件化设计,控制各路时序,完成用数字方法对脉冲信号的延迟控制,此时分辨率可以达到10ns级。
用模拟方法进行延迟低位部分控制时,选用了DS1020延迟线芯片。
只要在电路板上搭建多组以DS1020延迟线芯片为主的电路,就可以同时输出多路脉冲序列。
此时最大延迟分辨率可以达到0.15ns级。
本方案中各路计数器模块和延迟线的延迟时间均可由@编程来动态调整,系统结构框图如图1所示。
图1系统结构框图3方案实现系统选用Acte1公司的ProASIC3A3P250芯片实现数字部分。
一种脉宽精密可控的脉冲信号电路设计
一种脉宽精密可控的脉冲信号电路设计朱楠;黄建国;付在明【摘要】鉴于脉冲技术在现代电子技术领域中所发挥的基础作用,针对传统的可分立元件所构建的脉冲产生电路功能单一、不可编程、脉冲宽度难以调整和控制以及数字化、集成化程度低等不足,提出了一种基于可编程逻辑器件FPGA和高速ECL 器件的合成脉冲脉宽的调整方案,通过FPGA内部计数器和可编程延迟芯片的共同配合实现了脉冲宽度的大范围精密连续可调的目标,并详细论述了电路的基本原理及硬件的基本组成.通过实验验证,该方案对脉冲宽度精密控制可行可靠.【期刊名称】《中国测试》【年(卷),期】2010(036)002【总页数】4页(P56-58,62)【关键词】FPGA器件;可编程延迟芯片;脉冲合成;脉宽;窄脉冲【作者】朱楠;黄建国;付在明【作者单位】电子科技大学自动化工程学院,四川,成都,611731;电子科技大学自动化工程学院,四川,成都,611731;电子科技大学自动化工程学院,四川,成都,611731【正文语种】中文【中图分类】TM935.41;TN911.71 引言脉冲技术是现代电子技术中一项重要的基础技术,其在大规模集成电路的测试、半导体器件性能检测、地质探测以及雷达、电子对抗、通信系统和计算机硬件系统设计中都起着重要作用。
但传统意义上的脉冲信号已经不能满足现代技术的需要,在很多实际工程应用中对高速脉冲信号源多样化要求越来越高,不仅关注脉冲的频率和上升沿,而且要求高速脉冲的电平和幅度能够在较大范围内精密可控,同时需要其脉冲宽度和脉冲延迟也精密可调。
因此,该文根据实际需要,采用FPGA与高精度、高分辨率的可编程延迟芯片相结合的方法,实现对脉冲宽度的大范围高精度的精密可调控制。
方案的设计目标是实现频率覆盖范围为200kHz~250MHz、脉宽可调范围为2ns~(周期-2ns)、分辨率为10ps的脉冲信号。
根据设计目标,同时考虑到实际需要及产品化时对于成本的控制,经过对多种不同系列的FPGA比较后,选择了Altera公司的Cyclone系列的FPGA EP1C6Q240C6。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图1所示的是利用快斜波与负极性阶梯波叠加后与直流电平比较产生步进,常用的方法还有:快斜波与正极性阶梯波比较形成步进,
波与慢斜波比较形成步进,快斜波与负极性慢斜波叠加后与直流电平
精密数控脉冲延时电路的设计
作者:夏彬, 余孝安
作者单位:西安机电信息技术研究所,陕西,西安,710065
刊名:
现代经济信息(学术版)
英文刊名:MODERN ECONOMIC INFORMATION
年,卷(期):2009(1)
1.送万杰CPLD技术及其应用 1999
2.孙建东基于现场可编程门阵列的数控延时器的设计[期刊论文]-国外电子元器件 2006(09)
3.称兴文可编程宽频带精密延时器设计[期刊论文]-微计算机信息 2004(09)
4.陈小桥基于等效时间采样的高速数据采集技术[期刊论文]-电测与仪表 2002(08)
本文链接:/Periodical_xdjjxx200901062.aspx。