电机与运动控制系统第二版罗应立课后答案
电机与拖动课后习题答案(第二版)
第一章第一章 21.解:解:NN N N I U P h ´´´=-310N N N N U kw P I h ´´=310)(A9.9085.022*******=´´=KWI U P NNN20109.9022010331=´´=´´=--24.解:.解:1)WI U P N N N 176********=´=´= 2)W P P N N N 1496085.0176001=´=´=h 3)W P P p N N 26401=-=S 4)WR I p aacu6401.08022=´==5)W R U R I p f ff f cuf 05.5458.88220222====6) W P p N ad 6.14901.0=´=7) Wp p p p p ad cu Fe m 1850=--S =+25. 解:解:1)m N r n KW P m N T N N N ×=´==×12.543000969550min)/()(9550)(2)方法一)方法一A R U I f f f 212.15.181220===A I I I f N a 69.87212.19.88=-=-=07.03000114.069.87220=´-=-=F N a a N N e n R I U CmN I C I C T aN eaTem ×=´´=F =F =62.5869.8707.055.955.9方法二方法二W P P p N N 2558170009.882201=-´=-=S =--S =++cuf cu ad Fe m p p P p p p ff a a R I R I p 22--SW 73.14145.181212.1114.069.87255822=´-´-=mN n p p p n p m N T adFe m ×=++==×5.455.955.9)(00m N TT T T T Nem×=+=+=+=62.585.412.54023)%92.86%1009.88220100017%10010)(3=´´´=´´´=N N N N I U kw P h4)min /10802036.02200r C U n E e ==F =28. 解:解:1)m N r n KW P m N T N N N ×=´==×6.1883500969550min)/()(9550)( 2)AI I I fNa2505255=-=-=841.0500078.0250440=´-=-=F N a a N N e n R I U Cm N I C I C T a N e a T em ×=´´=F =F =88.2007250841.055.955.93)min/2.523841.04400r C U n N e N ==F = 4)min/3.470250841.01.0078.02.523r I C R R C U n a N e ad a N e N =´+-=F +-F =第二章第二章15.(1)W =÷÷øöççèæ´-´=÷÷øöççèæ-=571.01.201075.11.201102121232N N N N a I P I U R 068.01450571.01.20110N a N N N e =´-=-=n R I U C f 649.055.9N e N T ==f f C C min/r 1618068.0110N e N 0===f C U nm N 04.131.20649.0N N T emN ×=´==I C T f固有特性两点坐标为:固有特性两点坐标为:A 点(min /r 1618,00em ==n T ) B 点(min /r 1450,m N 04.13N em ==×=n n T ) (2)min /r 15341.205.0068.0571.01618aN e a 0=´´-=-=I C R n n f (3)aN e a0I C R n n f -=A 5.10571.0068.0)15301618()(a N e 0a =-=-=R C n n I f 16.(1)W =÷÷øöççèæ´-´=÷÷øöççèæ-=315.07.5310107.532202121232N NN N a I P I U R0677.03000315.07.53220N a N N N e =´-=-=n R I U C f 6465.055.9N e N T ==f f C Cmin/r 32500677.0220N e N 0===f C U n 197.76465.00677.0315.02N T e a =´==f b C C Rem em 0197.73250T T n n -=-=b(2)9.526465.00677.02315.02N T e ad a '=´+=+=f b C C R Rem em '09.523250T T n n -=-=b(3) min /r 16250677.01102N e NN e a '0====f f C U C U nA5.10571.0068.0)15301618()(a Ne 0a =-=-=R C n n I fem 197.71625T n -=(4)min /r 40638.00677.0220''e a 0=´==f C U n25.118.06466.00677.0315.0''22T e a =´´==f b C C Rem 25.114063T n -=17.(1)N a N aaNst 8.15A 6.3283067.0220I R U R EUI ====-=(2)A 25.3115.2075.15.1N s t =´==I IW=-=-=64.0067.025.311220a st N st R I U R 19.V 8.20612.0110220a N N aN =´-=-=R I U EA 2751105.25.2N max -=´-=-=I IW=---=--=632.012.02758.206a max aN ad R I E R20. (1) aN e a 0I C R n n f --= 172.012008.206N aN N e ===n E C f min/r 12791723.0220N e N 0===f C U nmin/r 135********.012.01279a N e a 0-=´--=--=I C R n n f (2) aNe ada 0I C R R n n f +--=()()W=--´+-=--´+=226.012.01101723.012771500aNNe 0ad R I C n n R f21. (1)294.0685296.064220N a N N N e =´-=-=n R I U C fmin /r 76719748643.0294.0296.0294.0220a Ne aN e N aN e a0-=--=´´--=--=--=I C R C U I C R n n f f f ()()W =-´-´+´-=--´+=837.0296.0643.0294.07486852.1aNN e 0R I C n n R ad f(3) 可用串电阻方法可用串电阻方法r/min5.3425.0N =n7.1793.0803.22935.0296.07485.342ad´´´+-=R W =91.5ad R22 193.010005.054220N a N N N e =´-=-=n R I U C f843.155.9N e N T =´=f f C C m N 522.99emN ×=T(1) n 不能突变,min /r 1000N ==n n AR R n C U I ad a N N e N a 5.135.15.01000193.0220=+´-=+-=f NmI C T a N T em88.24==f(2) L T 保持不变且L em T T =稳定状态时,A 54N ==I I amin /r 580522.99843.1193.0290.1139emN 2N T e ad a N e N =´´-=+-=T C C R R C U n f f(3)原%2.84542201000012N =´==P P h%36.47542205.15410000%10021212=´´-=-=´=N ad a N I U R I P P P h或:%8.481000580%2.84N N =´==n n h h23.(1)a e ae N N I C R C U nf f -=A 2.1315.01000193.08.0220a N e N a=´´-=-=R n C U I f m N 5.1932.131193.055.98.08.0a N T em ×=´´´==I C T f(2)A5.678.0548.08.0N N T N T N a =====I C T C T I f fmin /r 12065.678.0193.05.08.0193.0220a e ae N =´´-´=-=I C R C U n ff(3) 12P P =h kW06.1210003.120610N N 2=´==n n P PkW 8514W 14850567220a N 1==´==I U P %2.81%10085.1406.12%10012=´=´=P P h24. (1) aN e aN e N I C R C Un f f -=A 345.01000193.0176a N N e a -=´-=-=R n C U I f m N 67.62)34(193.055.955.9a N e em ×-=-´´==I C T f(2) 稳态时稳态时A 54N a ==I Imin/r 772193.0545.0176ae a e N =´-=-=I C R C U n ff(3) W 950454176N 1=´==UI P W7.77166077214.325.9522=´´´=W ×=T P%2.8195047.7716%10012==´=P P h第三章第三章 4.N 2N 2N 1N 1N 33750I U I U S === A34.425.10310750A37.12353107503N231N =´´==´´=I I5. (1)此时,V 110,V 220ax A X ==U U 由于加于绕组两端的电压不变,所以m m F =F ¢不变不变磁势不变磁势不变设原边匝数为N 1 0'0'1'0101322·····=+=I I I N I N I N (2),V 110,V 220ax A X ==U U m m F =F ¢不变不变磁势不变磁势不变0'0'01'010122·····=-=I I I N I N I N8.空载变比43.144.0310==kW===42.2219365400320202m k I U k ZW =÷øöçèæ=÷øöçèæ=35.182********33222002m k I P kRW =-=91.22112m 2m m R Z XW ===42.7353450shsh sh I U ZW===W ===02.12104.235375003sh '2122sh shsh R R R I P R W =-===57.321212sh2sh sh '2σ1σR Z X X X9.(1)W =W =´+=+=W =´÷øöçèæ+=+=+=1.604.60137.096.2872.000194.023********.0sh 2221sh 2221sh 2sh2shsh Z k X k X X R k R R RXZ(3) ()()()%97.1%10034506.004.68.0872.0188.23%),(8.0cos %9.2%10034506.004.68.0872.0188.23%),(8.0cos %586.0%1003450872.0188.23%,1cos A188.2334501080%100sin cos %2223N11N 2sh 2sh N1-=´´-´´=D ==´´+´´=D ==´´=D ==´=´+=D u u u I U X R I u 超前滞后时j j j j j b10.(1) ()W Ð=+=+=W+===´´=´==== 58.28735.315.636A47.1151000310200100035.2340031000'L sh L 2'L 3N1N 2N 1N j Z Z Z j Z k Z S I U U k W -Ð=ÐÐ==··58.2848.8258.2870310001N 1Z U I V3.38307.12.20633A2.206A48.82L 22L 121=´´=====Z I U kI I I (2) ()kW5.12558.28cos 48.8210003cos 31111=-´´´==j I U P878.0)58.28cos(cos1=-= j(3) ()()%100sin cos %100sin cos %N 12sh 2sh 1N 1221´+=´+=D U X R I U X R I u K K N j j j j b 894.096.048.0cos cos cos 12=÷øöçèæ==-tg L j j ()%2.4%10031000449.035.0894.015.048.82%=´´+´´=D u7143.047.11548.82==b %5.97%100105.125894.02.2063.3833%100cos 33122212=´´´´´=´==P I U P P j h11.(1) 66.840036000==k96.30746.85.45.7L 2'L Ð=+==j z k ZW =´´==064.09.538310563232shshN sh I p RA9.5386000310560033N 1N N 1sh =´´==U S I IW ===3.09.53832803shshsh I U ZW=-=293.02sh 2sh sh R z XW Ð=W +=+= 36.32955.8793.4564.7'L s h j Z Z Z36.328.38636.32955.8036000311-Ð=ÐÐ==··zU I NA 8.3861=I A 5802312==kI I V6.3901166.0325.58023L 22L =´=×=Z I U96.301166.006.01.0L Ð=+=j Z(2) shN 202N 0shN 2cos 1p p S p p b j b b h +++-=718.09.5388.386N 11===I I b858.096.30cos cos2==j%66.9810181056718.0858.010*******.010*********.013323332=´+´´+´´´´+´´-=h567.010561018,33shN 0m max =´´==p p b h 时%7.9810181056567.0858.010*******.010*********.013323332max=´+´´+´´´´+´´-=h或%7.982cos 2102N 0max=+-=p S p j b h第四章第四章24. 解:05.0100095010001N 1N =-=-=n n n sem N cu2P s p = ∴5%的电磁功率消耗在转子电阻上。
自动控制原理与应用答案解析第二版_课后答案解析
第二章习题课 (2-11d)
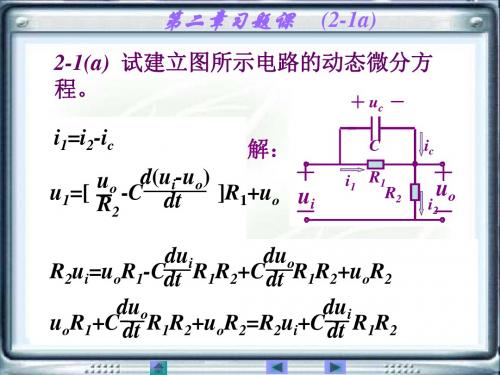
2-11d 求系统的闭环传递函数 。
解: (1)
R(s) G1 + G2
C(s)
_
HG2
R(s)
_
C(s) G1 + G2
L1 H
C(s) R(s)
= (G1+G2
)
1 1+G2H
(2) L1=-G2H P1=G1 Δ1 =1
P2=G2 Δ2 =1
第二章习题课 (2-11e)
C(s)=
(s2+4s+2) (s+1)(s+2)
=1+
2 s+2
-
1 s+1
c(t)=δ (t)+2e-2t+e-t
第二章习题课 (2-10)
2式R-1(,s0) 试已- R画知(sG出)系1 -系统统G1的+2的G微G3G动1分G2G-2态G6方+3G结GG程-432GG构组46G图G5的3C并拉(s求)氏G传4变C递(s换) RC((函解ss))R=数:(s1)。+CRG- ((ss3)GX)X[GGX112(7(-1GX2(ssXs())3)s6=(=1--)s(G+GR{=s)=)R81GG((GGsGs(C2))3s236(]GG)G((s-ssG)1CG)4)1[[(XX=G2GXXsC7(3-)2Gs2((1G(5--2()ss(sGs+4G[))s8))(GG-)G1s-C3-15()7-GG(Gs(X+(1ss)GsGG)6)64[3)GG(3G(-3sG2sGG55G)G7)(4X2s(G8GG3GGG)s3(X3])5s7G86(573-)s(GC]s)4})]((8GsGG(s)14)7(C]s-C)(Gs(s)8))
(完整word版)控制电机(2版)思考题与习题参考答案
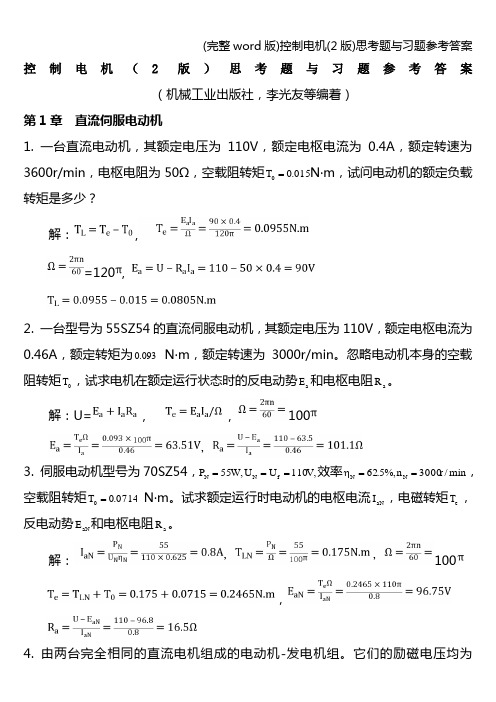
控制电机(2版)思考题与习题参考答案(机械工业出版社,李光友等编着)第1章 直流伺服电动机1. 一台直流电动机,其额定电压为110V ,额定电枢电流为0.4A ,额定转速为3600r/min ,电枢电阻为50Ω,空载阻转矩015.0T 0=N ·m ,试问电动机的额定负载转矩是多少? 解:, =120,2. 一台型号为55SZ54的直流伺服电动机,其额定电压为110V ,额定电枢电流为0.46A ,额定转矩为093.0 N ·m ,额定转速为3000r/min 。
忽略电动机本身的空载阻转矩0T ,试求电机在额定运行状态时的反电动势a E 和电枢电阻a R 。
解:U=, , 1003. 伺服电动机型号为70SZ54,,V 110U U ,W 55P f N N ===效率min /r 3000n %,5.62N N ==η,空载阻转矩0714.0T 0= N ·m 。
试求额定运行时电动机的电枢电流aN I ,电磁转矩e T ,反电动势aN E 和电枢电阻a R 。
解:100 ,4. 由两台完全相同的直流电机组成的电动机-发电机组。
它们的励磁电压均为110V,电枢绕组电阻均为75Ω。
当发电机空载时,电动机电枢加110V电压,电枢电流为0.12A,机组的转速为4500r/min。
试求:(1)发电机空载时的输出电压为多少?(2)电动机仍加110V电压,发电机负载电阻为1kΩ时,机组的转速为多少?解:(1)(2)由得,, =0.12A, n=4500r/min.接负载时,U=,解得=4207r/min5. 试用分析电枢控制时的类似方法,推导出电枢绕组加恒定电压,而励磁绕组加控制电压时直流伺服电动机的机械特性和调节特性。
并说明这种控制方式有哪些缺点?答:磁场控制时电枢电压保持不变。
机械特性是指励磁电压不变时电动机转速随电磁转矩变化的关系,即= 。
由公式可知,当控制电压加载励磁绕组上,即采用磁场控制时,随着控制信号减弱,减小,k增大,机械特性变软。
运动控制系统-课后习题答案

运动控制系统 课后习题答案2.2 系统的调速范围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少?解:10000.02(100.98) 2.04(1)n n sn rpm D s ∆==⨯⨯=-系统允许的静态速降为2.04rpm2.3 某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为0min 150min n r =,带额定负载时的速度降落15min N n r ∆=,且在不同转速下额定速降 不变,试问系统能够达到的调速范围有多大?系统允许的静差率是多少?解:1)调速范围max minD n n =(均指额定负载情况下)max 0max 1500151485N n n n =-∆=-= min 0min 15015135N n n n =-∆=-= max min 148513511D n n ===2) 静差率01515010%N s n n =∆==2.4 直流电动机为P N =74kW,UN=220V ,I N =378A ,n N =1430r/min ,Ra=0.023Ω。
相控整流器内阻Rrec=0.022Ω。
采用降压调速。
当生产机械要求s=20%时,求系统的调速范围。
如果s=30%时,则系统的调速范围又为多少?? 解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-⨯=378(0.0230.022)0.1478115N n I R rpm ∆==⨯+=[(1)]14300.2[115(10.2)] 3.1N D n S n s =∆-=⨯⨯-= [(1)]14300.3[115(10.3)] 5.33N D n S n s =∆-=⨯⨯-=2.5 某龙门刨床工作台采用V-M 调速系统。
已知直流电动机60,220,305,1000min N N N N P kW U V I A n r ====,主电路总电阻R=0.18Ω,Ce=0.2V •min/r,求:(1)当电流连续时,在额定负载下的转速降落N n ∆为多少? (2)开环系统机械特性连续段在额定转速时的静差率N S 多少?(3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落N n ∆又为多少? 解:(1)3050.180.2274.5/min N N n I R Ce r ∆=⨯=⨯=(2)0274.5(1000274.5)21.5%N N S n n =∆=+=(3)(1)]10000.05[200.95] 2.63/min N n n S D s r ∆=-=⨯⨯=2.6 有一晶闸管稳压电源,其稳态结构图如图所示,已知给定电压*8.8uU V =、比例调节器放大系数2P K =、晶闸管装置放大系数15S K =、反馈系数γ=0.7。
电机与拖动(第二版)习题解答

2.1.2解:(1) E 1=4.44N 1f Фm =4.44×783×50×0.0575≈9995(V) E 2=4.44N 2f Фm =4.44×18×50×0.0575≈229.77(V) (2)设.999501E =∠ ,则.110000180.01U =∠ ...11110000180.019995000.6j2.45U E Z I ︒︒+∠+∠==+ 100009995 1.991042.5276︒︒-+≈=∠∠ I 0=1.99A(3)..222229.7704185.2515.630.0029j0.001+0.05-j0.016L E I Z Z ︒︒∠==≈∠++ I 2=4185.25Ak=N 1/N 2=783/18=43.5I 1=I 2/k=4185.25/43.5=96.21(A)2.3.1解:12 6.3k=15.750.4NP NP U U === U 1NP =U 1N'2Z =k 2Z 2=15.752(0.024+j0.04)=5.59+j9.92'L Z =k 2Z L =15.752(2.4+j1.2)=595.35+j297.68'2Z +'L Z =5.59+j9.92+595.35+j297.68=601.3+j307.6=675.41∠27.09°(Ω) ''m 2e 1''m 2()=+L LZ Z Z Z Z Z Z Z +++=6+j8+(1500+j6000)675.4127.091500+j6000+601.3+j307.6︒⨯∠ =637.61∠31.8(Ω) ..11e 3641.620=637.6131.8NP U I Z ︒︒∠=∠=5.71∠-31.8°(A)...'2111NP E E U Z ==-=(6+j8)×5.71∠-31.8°-3641.62∠0° =3588.49∠-180.33°(V) .'.'22''23588.49180.33675.4127.03L I E Z Z ︒︒∠-==∠+=5.31∠-207.42°(A) =5.31∠152.58°A'22kI I ==15.75×5.31=83.63(A)I 2NP =I 2N363101.73400⨯=⨯=91(A) 由于I 2﹤I 2NP ,所以未过载。
《电机与电气控制技术》第2版--习题解答--第一章--变压器
《电机与电气控制技术》第2版--习题解答--第一章--变压器《电机与电气控制技术》第2版习题解答第一章变压器1-1 在分析变压器时,对于变压器的正弦量电压、电流、磁通、感应电动势的正方向是如何规定的?答:在分析变压器运行时,上述正弦量的正方向规定如下:1)电源电压正方向与其电流正方向采用关联方向,即两者正方向一致;2)绕组电流正方向与所建立的磁通正方向符合右手螺旋定则;3)由交变磁通产生的感应电动势,两者的正方向符合右手螺旋定则。
1-2 变压器中的主磁通和漏磁通的性质和作用是什么?答:变压器一次绕组流过正弦交流电流,产生正弦交流磁通,该磁通绝大部分沿变压器铁心闭合且与一、二次绕组同时交链,这部分磁通为主磁通;而另有很少的一部分磁通只与一次绕组交链,且主要经非磁性材料闭合,不只二次绕组交链的磁通为一次绕组的漏磁通。
击穿或烧坏。
1-5 一台单相变压器,额定容量为S N =250KV·A ,额定电压U 1N /U 2N =10KV/0.4KV ,试求一、二次侧额定电流I 1N 、I 2N 。
答:由S N =U 1N I 1N = U 2N I 2N则I 1N =S N /U 1N =250KV·A/10KV=25AI 2N = S N / U 2N =250KV·A/0.4KV=62'5A1-6 有一台三相变压器,S N =100KV·A ,U 1N /U 2N =6KV/0.4KV ,Y yn 联结,求一、二次绕组的额定电流。
答:由SN 1122N N N N I I =,而一、二次绕组均为里接,线电流=相电流则I '1N =I 1N =1100KV A 6KV 9.63A N N S=⋅= I '2N =I 2N =2100KV A 0.4KV 144.5A N N S =⋅=1-7 有一台三相变压器,S N =500KV·A ,U 1N /U 2N =10.5KV/6.3KV ,Y d 联结,求一、二次绕组的额定电流。
《电机与运动控制系统》课后习题参考答案

《电机与运动控制系统》课后习题参考答案第一章磁路(5题)1-1.一环形铁心,平均路径长度为36cm,横截面为3cm2,上绕400的线圈。
当励磁电流为1.4A时,铁心中的磁通为1.4⨯10-3Wb。
试求:(1)磁路的磁阻;(2)此时铁心的磁导率及相对磁导率。
[400⨯103A/Wb;0.003H/m,2400]解:①.R m=F/Φ=IW/Φ= 1.4⨯400/(1.4⨯10-3)=400000=400⨯103(A/Wb);②.μ= l/(S⨯R m)=0.36/(0.0003⨯400⨯103) =0.003(H/m);③.μr =μ/μ0 =0.003/(4π⨯10-7)=2387.3241。
答:(1)磁路的磁阻为:400⨯103A/Wb;(2)此时铁心的磁导率及相对磁导率分别为:0.003H/m和2400。
(答毕#)1-2.为了说明铁磁材料的磁导率随磁化状态而变化的情况,根据硅钢片的B-H曲线(图1-2-3)试计算:当磁密分别为0.8T、1.2T和1.6T 时,其磁导率和相对磁导率各为多少?说明磁导率与饱和程度有什么关系?[3.8⨯10-3H/m;3040;1.7⨯10-3H/m,1360;0.4⨯10-3H/m,320]解:①.由硅钢片的B-H曲线(图1-2-3)查得:当磁密分别为0.8T、1.2T和1.6T时,磁场强度分别为:0.2⨯103A/m、0.7⨯103A/M和4.25⨯103A/m。
根据μ=B/H和μr =μ/μ0,其磁导率和相对磁导率各为:4⨯10-3H/m、1.7⨯10-3H/m、0.4⨯10-3H/m和3180、1364、300(近似值,计算结果:0.004、0.0017、0.000376和3183.0989、1364.1852、299.5858);②.由上述计算可知:硅钢片的磁导率随着饱和程度的增加而急剧减小[要得到0.8T的磁密,只需要磁场强度为:0.2⨯103A/m;而要得到1.6T的磁密,就需要磁场强度为:4.25⨯103A/m。
第二版1-3章习题及详解
第1章习题及详解1-1 试举出日常生活中所见到的开环控制系统和闭环控制系统各一例,并分别说明其工作原理。
答:开环控制系统与闭环控制系统的差别在于有没有将输出量反馈到输入端的反馈通道。
家庭空调的温度控制就是一个闭环控制系统,其原理是当室内温度升高或降低时,温度传感器将检测到的实际温度反馈到系统输入端与参考输入给定的期望温度比较求得偏差,温度控制器根据偏差信号产生控制作用控制压缩机制冷量,从而维持室温在期望值附近。
在要求不高的场合,有些简单的传送带系统是由电动机带动的开环控制系统。
工作原理很简单,只需闭合电源开关,则电动机带动传送带运行,传送带上负载变化会引起传送速度变化。
1-2 试说明开环控制和闭环控制的优缺点。
答:开环控制系统的控制精度主要取决于系统本身参数的稳定程度,没有抵抗外部干扰的能力,因此,在实际工作环境中,难以达到很高的控制精度。
开环控制系统的优点是结构简单,成本较低,缺点是抗扰性能差。
对于参数稳定的系统,在外部干扰较弱或控制精度要求不高的场合,开环控制系统仍被大量使用。
闭环控制系统利用反馈信号得到的偏差来产生控制作用,也称为反馈控制系统。
这种基于偏差的闭环控制系统具有较强的抵抗外部和内部扰动的能力,并使其对内部参数的变化没有开环控制系统那么敏感,换句话说,要达到较高的控制精度,闭环控制系统对其内部参数的精度要求没有开环控制系统那么高。
由于增加了反馈元件和比较元件等,闭环控制系统的结构相对复杂,成本也有所增加,特别地,当控制装置的参数配合不当时,可能会出现系统内部信号剧烈振荡,甚至发散导致系统不稳定而无法工作的情况。
闭环控制系统的稳定性问题是开环控制系统没有的独特现象。
闭环控制系统的优点:具有很强的自动纠偏能力和较高的控制精度;缺点:由于采用了反馈装置,设备增多,结构复杂,成本增加,同时存在稳定性问题。
闭环控制系统具有的自动纠偏能力和较高的控制精度是开环控制系统无法替代的,因而在控制工程实际中获得了最广泛的应用。
运动控制第二章课后习题答案1
课后思考题2.1转速单环调速系统有那些特点?改变给定电压能否改变电动机的转速?为什么?如果给定电压不变,调节测速反馈电压的分压比是否能够改变转速?为什么?如果测速发电机的励磁发生了变化,系统有无克服这种干扰的能力?答:1)闭环调速系统可以比开环调速系统硬得多的稳态特性,从而在保证一定静差率的要求下,能够提高调速范围。
为此,所需付出的代价是需增设电压放大器以及检测与反馈装置。
2)能。
因为)1()1(*k C RI k C U k k n e de ns p +-+=,由公式可以看出,当其它量均不变化时,n 随着*n U 的变化而变化3)能。
因为转速和反馈电压比有关。
4)不,因为反馈控制系统只对反馈环所包围的前向通道上的扰动起抑制作用 ,而测速机励磁不是。
2.2为什么用积分控制的调速系统是无静差的?在转速负反馈调速系统中,当积分调节器的输入偏差电压0=∆U 时,调节器的输出电压是多少?它取决于那些因素?答: 使用积分控制时可以借助积分作用,使反馈电压n U 与给定电压*n U 相等,即使n U ∆为零C U 一样有输出,不再需要n U ∆来维持C U ,由此即可使输出稳定于给定值使调速系统无静差。
当0=∆n U 时调节器的输出为电压C U ,是对之前时刻的输入偏差的积累。
它取决于n U ∆的过去变化,当n U ∆为正C U 增加,当n U ∆为负C U 下降,当n U ∆为零时C U 不变。
2.3在无静差转速单闭环调速系统中,转速的稳态精度是否还受给定电源和测速发电机精度的影响?试说明理由;答: 在无静差转速单闭环调速系统中,转速的稳态精度同样受给定电源和测速发电机精度的影响。
无静差转速单闭环调速系统只是消除了误差,使输出的转速基本稳定于给定的转速。
但是,这种系统依然属于反馈控制系统,只能抑制被反馈环包围的前向通道上的扰动,对于其他环节上的精度影响无可奈何。
2.4在电压负反馈单闭环有静差调速系统中,当下列参数发生变化时,系统是否有调节作用,为什么?(1)放大器的放大倍数Kp (2)供电电网电压 (3)电枢电阻Ra(4)电动机励磁电流 (5)电压反馈系数a答:3)电枢电阻,4)电动机励磁电流,(5)电压反馈系数a 无调节作用。
运控控制系统课后题答案
第二章思考题 2-11转速、电流双闭环调速系统稳态运行时,两个调节器的输入偏差电压和输出电压各是多少?为什么?答:转速、电流双闭环系统稳态运行时,两个调节器的输入偏差都为0。
转速调节器的输出电压为电流给定dL d i i I I U U ββ===*, 电流调节器的输出电压为sdL n e sd e sdo c K RI U C K RI n C K U U +=+==α*。
2-14 转速、电流双闭环调速系统中,两个调节器均采用PI 调节器。
当系统带额定负载运行时,转速反馈线突然断线,系统重新进入稳态后,电流调节器的输入偏差电压i U ∆是否为零?为什么?答:转速反馈线突然断线,i U ∆不等于零,*n n U U =∆,转速调节器ASR 很快饱和输出,转速环失去作用,电流给定最大,达到稳态时dm dl d I I I <=由于负载不变所以负载电流不变,所以输入偏差0*>-=-=∆d dm i im i I I U U U ββ,因而不为零。
习题 2-8 (1)100010% 5.56(1)20(110%)N cl n S n D S ⨯∆===-⨯-01000 5.561005.56/minN cl n n n r =+=+=*max150.015min 1005.56minnmv V r rn Uα==≈⋅ 220940.15(2)0.2059.m in/100094(0.150.3)205.4.m in/0.2059N N ae Nd op eU I R C V rn R I n V rC --⨯===⨯+∆===205.411365.56op cln K n ∆≥-=-≈∆取k=3636.950.205912.354400.015e p s K C K K a⨯===⨯(3)取020R k =Ω,则102012.354247.68p R R K k k =⨯=Ω⨯=Ω(4)*1.51.1n comdbl Nscom dcr Ns U U I I R U I I R ⎧+≈=⎪⎪⎨⎪==⎪⎩两式联立解得41.360.4com s U VR =⎧⎨=Ω⎩ 20.4s R R ==Ω稳压管的击穿电压值为41.36V 2-23(1)当电压不饱和时,由0,0n n U ==∆可得n U U n n α==*得出*150.011500nm N U n α===,进而得出*5500/min 0.01nU n r α===0.1285002023.4730e d c sC n I RU V k +⨯+⨯===(2)电动机失磁时,φ立即减小,因为,d d e U E I E C nRφ-==,所以d I 立即增加。
自控原理第二版习题解答
“十二五”职业教育国家级规划教材普通高等教育“十一五”国家级规划教材全国高等专科教育自动化类专业规划教材《自动控制原理》(第2版)习题解答机械工业出版社第一章习题解答1-1试列举开环控制和闭环控制的例子,并说明其工作原理。
答:开环控制:电风扇的转速控制。
电风扇的转速有多个转速档位,其风量大小可由调节其转速档位控制,其转速档位一旦确定后,其转速就相对固定,风量大小相对固定,气温变化时其风量不会自动调节,此控制属于开环控制。
闭环控制:1、家用抽水马桶的水位控制。
家用抽水马种闭环控制,其工作原理为:水箱水位的检测为浮球,浮球通2、普通车床的主轴控制系统,其转速控制属于一个开环系统。
即档位一旦确定后,其电动机的转速不会因为车床所加工零件的硬度或负载大小变化而自动稳速。
桶的水位控制系统属于一过杠杆连接进水阀的开闭,当水位达到规定水位时,浮球通过杠杆连接的进水阀关闭,当马桶冲水后,水箱水位下降,浮球通过杠杆连接的进水阀开启,水注入水箱,水箱水位上升,上升到设定水位时,浮球通过杠杆连接的进水阀关闭,水位保持设定高度不变,整个过程不需人为干涉,系统自动完成。
3、龙门刨床工作台的速度控制。
由于龙门刨床加工工艺要求工作台的运行速度必须恒定,这就要求电动机的转速要求恒定,因此其龙门刨床工作台的速度控制属于一种闭环控制,其工作原理为:工作台的运行由直流电动机带动,为此电动机的控制系统由给定装置、晶闸管整流装置、直流电动机、测速发电机等环节组成。
当某种原因造成带动工作台运行的电动机转速下降时,测速发电机检测的电压下降,此电压与给定电压比较,产生偏差电压,此电压使得晶闸管整流装置的输出电压增加,电动机转速上升,直到达到给定转速,此时经测速发电机反馈的电压与给定电压产生的偏差电压为零,晶闸管整流装置的输出电压不再增加,电动机转速保持稳定。
此既为一闭环控制。
1-2 请说明开环系统和闭环系统的主要特点,并比较两者的优缺点。
答:开环系统的特点是:(1)系统结构简单;(2)系统的信号由给定值至被控量为单向传递,无反馈;(3)被控量不能被自动调节。
电机控制技术 罗文广课后习题答案
电机控制课后习题(部分答案)1-1.负载转矩的折算原则是什么?负载飞轮矩的折算是什么?答:负载转矩折算的原则是折算前后的功率不变;负载飞轮矩折算的原则是折算前后的动能不变。
1-2.什么是负载特性?什么是电动机的机械特性?答:电力拖动系统的负载转矩特性简称负载特性是指生产机械的负载转矩与转速的关系,典型的负载特性有恒转矩负载、通风机与泵类负载和恒功率负载等。
电动机的机械特性是电动机的输出扭矩与其转速之间的关系。
1-3. 电力传动系统稳定运行的充分必要条件是什么?答:为了保证电力系统稳定运行,电力系统必须满足以下要求:(1)为保持电力系统正常运行的稳定性和频率、电压的正常水平,系统应有足够的静态稳定储备和有功、无功备用容量,并有必要的调节手段。
在正常负荷波动和调节有功、无功潮流时,均不应发生自发振荡。
(2)要有合理的电网结构。
(3)在正常方式(包括正常检修方式)下,系统任意一个元件(发电机、线路设备、变压器、母线)发生单一故障时,不应导致主系统发生非同步运行,不应发生频率崩溃和电压崩溃。
(4)在事故后经调整的运行方式下,电力系统仍应有符合规定的静稳定储备,其他元件按规定的事故过负荷运行。
(5)电力系统发生稳定破坏时,必须有预定措施,以缩小事故范围减少事故损失。
2-1.分析并比较交、直流电动机的特点?答:课本38页,表3-12-2.直流电动机有哪些励磁方式?各种励磁方式分别有何特点?答;直流电动机的励磁方式有他励、并励、串励和复励等。
他励式的特点是励磁绕组单独接其他直流电源,这样励磁电流由该电源供给;并励式的特点是励磁绕组和电枢绕组并联,接同一个直流电源,励磁绕组上的电压就等于电枢绕组的端电压;串励式的特点是励磁绕组与电枢绕组串联连接,这样励磁绕组的电流就等于电枢绕组的电流;复励方式的特点是有两套励磁绕组:一套是与电枢绕组并联的并励绕组,另一套是与电枢绕组串联的串励绕组。
若串励绕组产生的磁动势与并励绕组产生的磁动势方向相同,就称为积复励式;若方向相反,则称为差复励式。
《电机与电气控制技术》第2版 习题解答 第三章 直流电机

《电机与电气控制技术》第2版习题解答第三章直流电机3—1直流电机中为何要用电刷和换向器,它们有何作用?答:直流发电机与直流电动机的电刷是直流电压、电流引出与引入的装置.在发电机中换向器是将电枢元件中的交变电势度换为电刷向直流电势;在电动机中换向器使外加直流电流变为电枢元件中的交流电流,产生恒定方向的转矩,使电枢旋转。
3—4阐明直流电动机电磁转矩和电枢电动势公式T=C tφI a1,E a=C eφn中各物理量的涵义。
答:直流电动机电磁转矩T=C TφI a式中C T:与电动机结构有关的常数,称转矩系数;φ:每极磁通;I a:电枢电流、T:电磁转矩。
直流电动机电枢电动势公式E a=C eφn式中:C e:与电动机结构有关的另一常数,称电动势系数;φ:每极磁通;n:电动机转速;E a:电枢电动势。
3-5直流电动机电枢电动势为何称为反电动势?答:直流电动机电枢转动时,电枢绕组导体切割磁力线,产生感应电动势,由于该电动势方向与电枢电流的方向相反,故称为反电动势。
3-6试写出直流电动机的基本方程式,它们的物理意义各是什么?答:直流电动机的基本方程式有电动势平衡方程式、功率平衡方程式和转矩平衡方程式.1)电动势平衡方程式:U=E a+I a R a式中U:电枢电压;E a:电枢电动势;I a:电枢电流;R a:电枢回路中内电阻.2)功率平衡方程式:电动机的输入电功率P1=P em+P cua式中P em:电磁功率P cua:电枢绕组的铜损电动机输出的机械功率:P2=P em-P Fe-P m=P1-P cua-P Fe-P m式中P Fe:电枢铁心损耗;P m:机械损耗;P1:电动机输入的电功率.3)转矩平衡方程式:T2=T-T0式中T2:电动机轴上输出的机械转矩;T:电动机电磁转矩;T0:空载转矩.3。
7。
何谓直流电动机的机械特性,写出他励直流电动机的机械特性方程式。
答:直流电动机的机械特性是在稳定运行情况下,电动机的转速n与机械负载转矩T L之间的关系,即n=f(T L).机械特性表明电动机转速因外部负载变化而变化的情况,由于电动机电磁转矩T近似等于910负载转矩T L ,故n=f(T L )常写成n=f(T)。
运动控制系统思考题参考答案

第二章思虑题:2-1直流电念头有哪几种调速办法?各有哪些特色?1.电枢回路串电阻调速特色:电枢回路的电阻增长时,幻想空载转速不变,机械特点的硬度变软.反之机械特点的硬度变硬.2.调节电源电压调速特色:电念头的转速跟着外加电源电压的降低而降低,从而达到降速的目标.不合电源电压下的机械特点互相平行,在调速进程中机械特点的硬度不变,比电枢回路串电阻的降压调速具有更宽的调速规模.3.弱磁调速特色:电念头的转速跟着励磁电流的减小而升高,从而达到弱磁降速的目标.调速是在功率较小的励磁回路进行,掌握便利,能耗小,调速的腻滑性也较高.2-2简述直流 PWM 变换器电路的根本构造.IGBT,电容,续流二极管,电念头.2-3直流 PWM 变换器输出电压的特点是什么?直流电压2-4为什么直流PWM变换器-电念头体系比V-M体系可以或许获得更好的动态机能?直流PWM变换器-电念头体系比V-M体系开关频率高,电流轻易持续,谐波少,电念头损耗及发烧都较小;低速机能好,稳速精度高,调速规模宽;若与快速响应的电念头合营,则体系频带宽,动态响应快,动态抗扰才能强;电力电子开关器件工作在开关状况,导通损耗小,当开关频率适中时,开关损耗也不大,因而装配效力较高;直流电源采取不控整流时,电网功率因数比相控整流器高.2-5在直流脉宽调速体系中,当电念头停滞不动时, 电枢两头是否还有电压?电路中是否还有电流?为什么?电枢两头还有电压,因为在直流脉宽调速体系中,电念头电枢两头电压仅取决于直流.电路中无电流,因为电念头处已断开,构不成通路.2-6直流PWM变换器主电路中反并联二极管有何感化?假如二极管断路会产生什么效果?反并联二极管是续流感化.若没有反并联二极管,则IGBT的门极掌握电压为负时,无法完成续流,导致电念头电枢电压不近似为零.2-7直流 PWM 变换器的开关频率是否越高越好?为什么?不是越高越好,因为太高的话可能消失电容还没充完电就IGBT关断了,达不到须要的输出电压.2-8泵升电压是如何产生的?对体系有何影响?若何克制?对滤波电容充电的成果造成直流侧电压升高.过高的泵升电压将超出电力电子器件的耐压限制值.拔取电容量较大且合适的电容.2-9在晶闸管整流器-电念头开环调速体系中,为什么转速随负载增长而降低?负载增长,负载转矩增大,电念头转速降低直到电磁转矩等于负载转矩时速度就不变了,达到稳态.T-TL=J*dn/dt2-10静差率和调速规模有何干系?静差率和机械特点硬度是一回事吗?举个例子.不是一回事.静差率是用来权衡调速体系在负载变更下转速的稳固度的.机械特点硬度是用来权衡调速体系在负载变更下转速的降低的.是机械特点的斜率.如:变压调速体系在不合转速下的机械特点是互相平行的,机械特点硬度是一样的,但是静差率却不合,空载转速高的静差率小.2-11调速规模与静态速降和最小静差率之间有何干系?为什么必须同时提才有意义?若只斟酌一个量,其余两个量在一个量必定的情形下另一个量就会不知足请求.2-12 转速单闭环调速体系有哪些特色?改变给定电压可否改变电念头的转速?为什么?假如给定电压不变,调节转速反馈系数是否可以或许改变转速?为什么?假如测速发电机的励磁产生了变更,体系有无战胜这种干扰的才能?特色:减小转速降低,降低静差率,扩展调速规模.改变给定电压能改变电念头转速,因为改变给定电业会改变电压变更值,进而改变掌握电压,然后改变输出电压,最后改变转速.假如给定电压不变,调节转速反馈系数是可以或许改变转速,因为调节转速反馈系数会改变反馈电压,进而改变电压变更值,掌握电压,输出电压,最终改变转速.假如测速发电机的励磁产生了变更,会造成Ce的变更,会影响转速,被测速装配检测出来,再经由过程反馈掌握的感化,减小对稳态转速的影响.体系有战胜这种干扰的才能.2-13 为什么用积分掌握的调速体系是无静差的?在转速单闭环调速体系中,当积分调节器的输入误差电压△U=0 时,调节器的输出电压是若干?它决议于哪些身分?比例调节器的输出只取决于输入误差量的近况,而积分调节器的输出则包含了输入误差量的全体汗青.固然到稳态时,只要汗青上有过,其积分就有必定的数值,足以产生稳态运行所须要的掌握电压UC.2-14在无静差转速单闭环调速体系中,转速的稳态精度是否还受给定电源和测速发电机精度的影响?为什么?受影响.因为无静差转速单闭环调速体系若给定电源产生偏移或者测速发电机精度受到影响会导致转速改变,进而反馈电压改变,使电压误差为零,所以转速的稳态精度会受影响.2-15在转速负反馈单闭环有静差调速体系中,当下列参数产生变更时体系是否有调节感化?为什么?(1)放大器的放大系数 Kp.(2)供电电网电压 Ud.(3)电枢电阻 Ra.(4)电念头励磁电流 If.(5)转速反馈系数α.(1)放大器的放大系数Kp产生变更时体系有调节感化,因为Kp产生变更时,掌握电压Uc就会改变,然后输出电压Ud0就会改变,转速改变,反馈电压随之改变,改变电压误差进一步伐节输出电压和转速达到调节感化.(2)供电电网电压 Ud产生变更时体系有调节感化,因为Ud产生变更时,会使Ks变更,进而改变输出电压和转速,反馈电压随之改变,改变电压误差进一步伐节输出电压和转速达到调节感化.(3)电枢电阻Ra产生变更时体系有调节感化,因为Ra产生变更时,会使电枢电路总电阻变更,使得转速改变,反馈电压随之改变,改变电压误差进一步伐节输出电压和转速达到调节感化.(4)电念头励磁电流 If产生变更时体系有调节感化,因为If产生变更时,使得Ce变更,转速改变,反馈电压随之改变,改变电压误差进一步伐节输出电压和转速达到调节感化.(5)转速反馈系数α产生变更时体系有调节感化,因为α产生变更时,使反馈电压改变,改变电压误差进一步伐节输出电压和转速达到调节感化.2-16(1)在转速负反馈单闭环有静差调速体系中,突减负载后又进入稳固运行状况,此时晶闸管整流装配的输出电压Ud较之负载变更前是增长.削减照样不变?(2)在无静差调速体系中,突加负载落后入稳态时转速n和整流装配的输出电压 Ud 是增长.削减照样不变?在转速负反馈单闭环有静差调速体系中,突减负载后又进入稳固运行状况,此时转速有所增大,反馈电压增大,电压误差减小,掌握电压减小,晶闸管整流装配的输出电压Ud较之负载变更前减小.在无静差调速体系中,突加负载后引起动态速降时,产生电压误差,掌握电压Uc从Uc1不竭上升,使电枢电压也由Ud1不竭上升,从而使转速n在降低到必定程度后又回升.达到新的稳态时,电压误差又恢复为零,但Uc已从Uc1上升到Uc2,使电枢电压由Ud1上升到Ud2,以战胜负载电流增长的压降.所以转速是不变的,输出电压Ud 是增长的.2-17 闭环调速体系有哪些根本特点?它能削减或清除转速稳态误差的本质是什么?根本特点:闭环,有反馈调节感化,减小速降,降低静差率,扩展调速规模.本质:闭环调速体系中参数变更时会影响到转速,都邑被测速装配检测出来,再经由过程反馈掌握的感化,减小它们对稳态转速的影响从而减小或清除转速稳态误差.第三章思虑题:3-1 在恒流起动进程中,电枢电流可否达到最大值 Idm?为什么?答:不克不及达到最大值,因为在恒流升速阶段,电流闭环调节的扰动是电念头的反电动势,它恰是一个线性渐增的斜坡扰动量,所以体系做不到无静差,而是Id 略低于Idm .3-2 因为机械原因,造成转轴堵逝世,剖析双闭环直流调速体系的工作状况.答:转轴堵逝世,则n=0,, 比较大,导致比较大, 也比较大,然后输出电压较大,最终可能导致电机烧坏.3-3 双闭环直流调速体系中,给定电压 Un*不变,增长转速负反馈系数α,体系稳固后转速反馈电压 Un 和现实转速 n 是增长.减小照样不变?答:反馈系数增长使得增大, 减小, 减小, 减小,输出电压减小,转速n减小,然后会有所减小,但是因为α增大了,总体照样增大的.3-4 双闭环直流调速体系调试时,碰到下列情形会消失什么现象?(1)电流反馈极性接反. (2)转速极性接反.答:(1)转速一向上升,ASR不会饱和,转速调节有静差.(2)转速上升时,电流不克不及保持恒值,有静差.3-5 某双闭环调速体系,ASR. 均采取 PI 调节器,ACR 调试中如何才干做到 Uim*=6V时,Idm=20A;如欲使 Un*=10V 时,n=1000rpm,应调什么参数?答:前者应调节,后者应调节.3-6 在转速.电流双闭环直流调速体系中,若要改变电念头的转速,应调节什么参数?改变转速调节器的放大倍数Kn行不成?改变电力电子变换器的放大倍数 Ks 行不成?改变转速反馈系数α行不成?若要改变电念头的堵转电流,应调节体系中的什么参数?答:转速n是由给定电压决议的,若要改变电念头转速,应调节给定电压.改变Kn和Ks不成.改变转速反馈系数α行.若要改变电念头的堵转电流,应调节或者.3-7 转速电流双闭环直流调速体系稳态运行时,两个调节器的输入误差电压和输出电压各是若干?为什么?答:均为零.因为双闭环调速体系在稳态工作中,当两个调节器都不饱和时,PI调节器工作在线性调节状况,感化是使输入误差电压在稳态时为零.各变量之间关系如下:3-8 在双闭环体系中,若速度调节器改为比例调节器,或电流调节器改为比例调节器,对体系的稳态机能影响若何?答:稳态运行时有静差,不克不及实现无静差.稳固机能没有比例积分调节器感化时好.3-9 从下述五个方面来比较转速电流双闭环直流调速体系和带电流截止负反馈环节的转速单闭环直流调速体系:(1)调速体系的静态特点. (2)动态限流机能. (3)起动的快速性. (4)抗负载扰动的机能. (5)抗电源电压摇动的机能.答:转速电流双闭环调速体系的静态特点,动态限流机能,起动的快速性,抗负载扰动的机能,抗电源电压摇动的机能均优于带电流截止负反馈环节的转速单闭环直流调速体系.3-10 根据速度调节器ASR.电流调节器ACR的感化,答复下面问题(设ASR.ACR均采取PI调节器):(1)双闭环体系在稳固运行中,假如电流反馈旌旗灯号线断开,体系仍能正常工作吗?(2)双闭环体系在额定负载下稳固运行时,若电念头忽然掉磁,最终电念头会飞车吗?答:(1)体系仍能正常工作,但是假如有扰动的话,体系就不克不及稳固工作了.(2)电念头忽然掉磁,转子在原有转速下只能产生较小的感应电动势,直流电机转子电流急剧增长,可能飞车.第四章思虑题:4-1剖析直流脉宽调速体系的不成逆和可逆电路的差别.答:直流PWM调速体系的不成逆电路电流.转速不克不及够反向,直流PWM调速体系的可逆电路电流.转速能反向.4-2 晶闸管电路的逆变状况在可逆体系中的重要用处是什么?答:晶闸管电路处于逆变状况时,电念头处于反转制动状况,成为受重物拖动的发电机,将重物的位能转化成电能,经由过程晶闸管装配回馈给电网.4-3 V-M体系须要快速回馈制动时,为什么必须采取可逆线路.答:因为晶闸管的单领导电性,对于须要电流反向的直流电念头可逆体系,必须运用两组晶闸管整流装配反并联线路来实现可逆调速.快速回馈制动时,电流反向,所以须要采取可逆线路.4-4采取单组晶闸管装配供电的V-M体系,画出其在整流和逆变状况下的机械特点,并剖析该种机械特点合适于何种性质的负载.答:单组晶闸管装配供电的V-M体系整流和逆变状况下的机械特点合适于拖动起重机等位能性负载.因为当α>90°,Ud0为负,晶闸管装配本身不克不及输出电流,电机不克不及产生转矩晋升重物,只有靠重物本身的重量降低,迫使电机反转,产生反向的电动势-E.所以合适于位能性负载.4-5晶闸管可逆体系中的环流产生的原因是什么?有哪些克制的办法?答:原因:两组晶闸管整流装配同时工作时,便会产生不流过负载而直接在两组晶闸管之间流畅的短路电流.克制的办法:1. 清除直流平均环流可采取α=β合营掌握,采取α≥β能更靠得住地清除直流平均环流.2.克制瞬时脉动环流可在环流回路中串入电抗器(叫做环流电抗器,或称均衡电抗器).4-6 试从电念头与电网的能量交换,机电能量转换关系及电念头工作状况和电念头电枢电流是否改变偏向等方面临本组逆变和反组回馈制动列表作一比较.答:本组逆变:大部分能量经由过程本组回馈电网.电念头正向电流衰减阶段,VF组工作,VF组是工作在整流状况.电念头电枢电流不改变偏向.反组回馈制动:电念头在恒减速前提下回馈制动,把属于机械能的动能转换成电能,个中大部分经由过程VR逆变回馈电网.电念头恒值电流制动阶段,VR组工作.电念头电枢电流改变偏向.4-7 试剖析合营掌握的有环流可逆体系正向制动进程中各阶段的能量转换关系,以及正.反组晶闸管所处的状况.答:在制动时,当发出旌旗灯号改变掌握角后,同时降低了ud0f和ud0r的幅值,一旦电机反电动势E>|ud0f|=|ud0r|,整流组电流将被截止,逆变组才真正投入逆变工作,使电机产生回馈制动,将电能经由过程逆变组回馈电网.当逆变组工作时,另一组也是在等待着整流,可称作处于“待整流状况”.即正组晶闸管处于整流状况,反组晶闸管处于逆变状况.4-8逻辑无环流体系从高速制动到低速时需经由几个象限?响应电念头与晶闸管状况若何?答::逻辑无环流体系从高速制动到低速时需经由一,二两个象限.响应电念头与晶闸管状况:正组逆变状况:电念头正转减速,VF组晶闸督工作在逆变状况,电枢电流正向开端衰减至零;反组制动状况:电念头持续减速,VR组晶闸督工作在逆变状况,电枢电流由零升至反向最大并保持恒定.4-9从体系构成.功用.工作道理.特点等方面比较直流PWM可逆调速体系与晶闸管直流可逆调速体系的异同点.答:体系构成:直流PWM可逆调速体系:六个二极管构成的整流器,大电容滤波,桥式PWM变换器.晶闸管直流可逆调速体系:两组晶闸管整流装配反向并联.功用:直流PWM可逆调速体系:电流必定持续,可使电念头四象限运行晶闸管直流可逆调速体系:能灵巧地掌握电念头的起动,制动和升.降速.工作道理:直流PWM可逆调速体系:六个二极管构成的不成控整流器负责把电网供给的交换电整流成直流电,再经由PWM变换器调节直流电压,可以或许实现掌握电念头的正反转.制动进程时,晶闸管整流装配经由过程逆变工作状况,把电念头的动能回馈给电网,在直流PWM体系中,它是把动能变成电能回馈到直流侧,但因为整流器的单领导通性,电能不成能经由过程整流装配送回交换电网,只能向滤波电容充电,产生泵升电压,及经由过程Rb消费电能实现制动.晶闸管直流可逆调速体系:当正组晶闸管VF供电,能量从电网经由过程VF输入电念头,此时工作在第I象限的正组整流电动运行状况;当电机须要回馈制动时,反组晶闸管装配VR工作在逆变状况,此时为第II象限运行;假如电念头本来在第III象限反转运行,那么它是运用反组晶闸管VR实现整流电动运行,运用反组晶闸管VF实现逆变回馈制动.特点:直流PWM可逆调速体系: 1.电流必定持续;2.可使电念头四象限运行;3.电念头停滞时有微震电流,能清除静摩擦逝世区;4.低速安稳性好,体系的调速规模大;5.低速时,每个开关器件的驱动脉冲仍较宽,有利于包管器件的靠得住导通.晶闸管直流可逆调速体系:可四象限运行,电流不持续;实现了正组整流电动运行,,反组逆变回馈制动,反组整流电动运行,正组逆变回馈发电四种状况.习题4-1试剖析晋升机构在晋升重物和重物降低时,晶闸管.电念头工作状况及α角的掌握规模?答:晋升重物:α<90°,平均整流电压Ud0>E(E为电念头反电动势),输出整流电流Id,电念头产生电磁转矩作电动运行,晋升重物,这时电能从交换电网经晶闸管装配传送给电念头,V-M体系运行于第Ⅰ象限.重物降低:α>90°,Ud0为负,晶闸管装配本身不克不及输出电流,电机不克不及产生转矩晋升重物,只有靠重物本身的重量降低,迫使电机反转,产生反向的电动势-E.4-2在合营掌握的有环流可逆体系中,为什么要掌握最小逆变角和最小整流角?体系中若何实现?答:原因:为了防止消失“逆变颠覆” ,必须形成最小逆变角βmin 呵护.实现:平日取αmin= βmin=30 °4-3何谓待逆变.本组逆变和它组逆变,并解释这三种状况各出如今何种场合下.答:待逆变:该组晶闸管装配在逆变角掌握劣等待工作,这时逆变组除环流外并未流过负载电流,也没有能量回馈给电网.本组逆变阶段:电念头正向电流衰减阶段,VF组工作;它组逆变阶段:电念头恒值电流制动阶段,VR组工作4-4 剖析合营掌握的有环流可逆体系反向起动和制动的进程,画出各参变量的动态波形,并解释在每个阶段中ASR和ACR各起什么感化,VF和VR遍地于什么状况.答:ASR 掌握转速设置双向输出限幅电路以限制最大起制动电流,ACR 掌握电流设置双向输出限幅电路以限制最小掌握角αmin 与最小逆变角βmin.反向起动时VF 处于整流状况,VR处于待逆变状况;制动时VF处于逆变状况,VR处于待整流状况.4-5逻辑掌握无环流可逆体系清除环流的动身点是什么?答:可逆体系中一组晶闸督工作时(不管是整流工作照样逆变工作),用逻辑关系掌握使另一组处于完整封锁状况,完整断开环流的通路,确保两组晶闸管不合时工作.4-6 为什么逻辑无环流体系的切换进程比合营掌握的有环流可逆体系的切换进程长?这是由哪些身分造成的?答:原因:逻辑切换指令发出后其实不克不及立时履行,还需经由两段延不时光,以确保体系的靠得住工作.这就是封锁延时和凋谢延时.造成的身分:封锁延时和凋谢延时.4-7 无环流逻辑掌握器中为什么必须设置封锁延时和凋谢延时?延时过大或过小对体系有何影响?答:原因:因为主电流的现实波形是脉动的,假如脉动的主电流瞬时低于I0就立刻发出零电流数字旌旗灯号,现实上电流仍在持续地变更,忽然封锁触发脉冲将产生逆变颠覆. 在检测到零电流旌旗灯号后等待一段时光,若仍不见主电流再超出I0 ,解释电流确已终止,再封锁本组脉冲.封锁延时tabl 大约须要半个到一个脉波的时光.在封锁触发脉冲后,已导通的晶闸管要过一段时光后才干关断,再过一段时光才干恢复阻断才能.假如在此以前就凋谢它组脉冲,仍有可能造成两组晶闸管同时导通,产生环流.凋谢延不时光 tdt ,一般应大于一个波头的时光4-8 弱磁与调压合营掌握体系空载起动到额定转速以上,主电路电流和励磁电流的变更纪律是什么?答:当进步Un,转速升到额定转速nN以上时,将根据感应电动势不变(E=EN)的原则,慢慢减小励磁电流给定U*if,在励磁电流闭环掌握感化下,励磁电流If<IfN,气隙磁通Φ小于额定磁通ΦN,电念头工作在弱磁状况,实现基速以上的调速.第五章思虑题:5-1 对于恒转矩负载,为什么调压调速的调速规模不大?电念头机械特点越软,调速规模越大吗?答:对于恒转矩负载,通俗笼型异步电念头降压调速时的稳固工作规模为0<S<Sm 所以调速规模不大.电念头机械特点越软,调速规模不变,因为Sm不变.5-2 异步电念头变频调速时,为何要电压调和掌握?在全部调速规模内,保持电压恒定是否可行?为安在基频以下时,采取恒压频比掌握,而在基频以上保管电压恒定?答:当异步电念头在基频以下运行时,假如磁通太弱,没有充分运用电念头的铁心,是一种糟蹋;假如磁通,又会使铁心饱和,从而导致过大的励磁电流,轻微时还会因绕组过热而破坏电念头.由此可见,最好是保持每极磁通量为额定值不变.当频率从额定值向下调节时,必须同时降低Eg即在基频以下应采取电动势频率比为恒值的掌握方法.然而,异步电念头绕组中的电动势是难以直接检测与掌握的.当电动势值较高时,可疏忽定子电阻和漏感压降,在全部调速规模内,保持电压恒定是不成行的.在基频以上调速时,频率从额定值向上升高,受到电念头绝缘耐压和磁路饱和的限制,定子电压不克不及随之升高,最多只能保持额定电压不变,这将导致磁通与频率成反比地降低,使得异步电念头工作在弱磁状况.5-3 异步电念头变频调速时,基频以下和基频以上分离属于恒功率照样恒转矩调速方法?为什么?所谓恒功率或恒转矩调速方法,是否指输出功率或转矩恒定?若不是,那么恒功率或恒转矩调速毕竟是指什么?答:在基频以下,因为磁通恒定,许可输出转矩也恒定,属于“恒转矩调速”方法;在基频以上,转速升高时磁通减小,许可输出转矩也随之降低,输出功率根本不变,属于“近似的恒功率调速”方法.5-4基频以下调速可所以恒压频比掌握.恒定子磁通.恒气隙磁通和恒转子磁通的掌握方法,从机械特点和体系实现两个方面剖析与比较四种掌握办法的优缺陷.答:恒压频比掌握:恒压频比掌握最轻易实现,它的变频机械特点根本上是平行下移,硬度也较好,可以或许知足一般的调速请求,低速时需恰当进步定子电压,以近似抵偿定子阻抗压降.在对于雷同的电磁转矩,角频率越大,速降低越大,机械特点越软,与直流电念头弱。
最新电机与运动控制系统(第二版)罗应立课后答案

2-1安培环路定律P11,磁路的欧姆定律P12,电磁感应定律P19不一定可以,因为磁路是非线性的,存在饱和现象。
2-2磁阻和磁导与磁路的磁导率、长度和截面积有关,其中磁导率取决于磁路的饱和程度,即磁通密度的大小。
2-3Φ2>Φ1 B2=B1Φ2=Φ1 B1>B22-4 (1)如果工作时进入磁饱和区,设备发热加剧,影响设备正常运行。
P15 P16(2)2-5 P242-6(1)P23(2)2-7 P242-8 (1)瞬态值(2)平均值2-9无功功率铁心损耗P372-10(1)P35 P39(2)P422-11 P39 重置前后磁动势不变P402-12 P37 大好2-13 因素:①铁芯材质,磁路结构②磁感应强度③原边和副边的绕线方式,顺序④线圈结构2-142-15 增大2-16 P422-172-18E1=-j4*44fW1ΦmE2 =-j4*44fW2Φm2-192-20 N1=W1 N2=W23-1(1)换向器在直流电机中起什么作用?答:在直流发电机中, 换向器起整流作用, 即把电枢绕组里的交流电整流为直流电, 在正、负电刷两端输出。
在直流电动机中,换向器起逆变作用, 即把电刷外电路中的直流电经换向器逆变为交流电输入电枢元件中。
(2)直流电机的主磁路由哪几部分组成?磁路未饱和时,励磁磁通势主要消耗在哪一部分上?答:直流电机的主磁路由以下路径构成: 主磁极N 经定、转子间的空气隙进入电枢铁心, 再从电枢铁心出来经定、转子间的空气隙进入相邻的主磁极S, 经定子铁心磁轭到达主磁极N, 构成闭合路径。
励磁磁通势主要消耗在空气隙上。
3-2直流电机的铭牌上的额定功率是指什么功率?答:对于直流发电机,是指输出的电功率;对于直流电动机,是指输出的机械功率。
3-33-4直流发电机的损耗主要有哪些? 铁损耗存在于哪一部分, 它随负载变化吗? 电枢铜损耗随负载变化吗?答:直流发电机的损耗主要有: (1 ) 励磁绕组铜损耗; ( 2 ) 机械摩擦损耗; ( 3) 铁损耗; ( 4 )电枢铜损耗; ( 5 ) 电刷损耗; ( 6 ) 附加损耗。
自动控制原理第二版课后习题参考答案

自动控制原理第二版课后习题参考答案2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCs RCs s U s U 112+=(b) ()()141112+⋅-=Cs R R R s U s U (c)()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i 2-8 (a)()()()()3113211G H G G G G s R s C +++=(b)()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b)()()()1221211222112++++=s C R C R C R s C R C R R s R s C 2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为 ()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K (2) 0,,==∞=a v p K K K K(3) 10,,K K K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()⎪⎭⎫ ⎝⎛++-=-=-t e t t c s n t n n nn 21222,1ωωωωω()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 32220220222001200=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s = ,于是稳态误差级数为())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=- 3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。
电机与运动控制系统第二版罗应立课后答案
2-1安培环路定律P11;磁路的欧姆定律P12;电磁感应定律P19不一定可以;因为磁路是非线性的;存在饱和现象..2-2磁阻和磁导与磁路的磁导率、长度和截面积有关;其中磁导率取决于磁路的饱和程度;即磁通密度的大小.. 2-3Φ2>Φ1 B2=B1Φ2=Φ1 B1>B22-4 1如果工作时进入磁饱和区;设备发热加剧;影响设备正常运行..P15 P1622-5 P242-6 1P2322-7 P242-8 1瞬态值2平均值2-9无功功率铁心损耗P372-101P35 P392P422-11 P39 重置前后磁动势不变P402-12 P37 大好2-13 因素:①铁芯材质;磁路结构②磁感应强度③原边和副边的绕线方式;顺序④线圈结构2-142-15 增大2-16 P422-172-18E1=-j444fW1ΦmE2 =-j444fW2Φm2-192-20 N1=W1 N2=W23-11换向器在直流电机中起什么作用答:在直流发电机中; 换向器起整流作用; 即把电枢绕组里的交流电整流为直流电; 在正、负电刷两端输出..在直流电动机中;换向器起逆变作用; 即把电刷外电路中的直流电经换向器逆变为交流电输入电枢元件中..2直流电机的主磁路由哪几部分组成磁路未饱和时;励磁磁通势主要消耗在哪一部分上答:直流电机的主磁路由以下路径构成: 主磁极N 经定、转子间的空气隙进入电枢铁心; 再从电枢铁心出来经定、转子间的空气隙进入相邻的主磁极S; 经定子铁心磁轭到达主磁极N; 构成闭合路径..励磁磁通势主要消耗在空气隙上..3-2直流电机的铭牌上的额定功率是指什么功率答:对于直流发电机;是指输出的电功率;对于直流电动机;是指输出的机械功率..3-33-4直流发电机的损耗主要有哪些铁损耗存在于哪一部分; 它随负载变化吗电枢铜损耗随负载变化吗答:直流发电机的损耗主要有: 1 励磁绕组铜损耗; 2 机械摩擦损耗; 3 铁损耗; 4 电枢铜损耗; 5 电刷损耗; 6 附加损耗..铁损耗是指电枢铁心在磁场中旋转时硅钢片中的磁滞和涡流损耗..这两种损耗与磁密大小以及交变频率有关..当电机的励磁电流和转速不变时; 铁损耗也几乎不变..它与负载的变化几乎没有关系..电枢铜损耗由电枢电流引起; 当负载增加时; 电枢电流同时增加; 电枢铜损耗随之增加..电枢铜损耗与电枢电流的平方成正比..3-5 P55页电枢电流;励磁电流3-6 P57页电动:n Te 同方向发电:n Te 反方向1.3电动2.4发电1.2.3.4为罗马数字为各量的实际运动方向提供参考3-7 1.略2.是3-8略3-93-10 1.先励磁再电枢2.一般的他励直流电动机为什么不能直接启动采用什么启动方法比较好答:他励直流电动机启动时由于电枢感应电动势Ea =CeΦn = 0 ; 最初启动电流IS =URa; 若直接启动; 由于Ra 很小; IS 会十几倍甚至几十倍于额定电流; 无法换向; 同时也会过热; 因此不能直接启动..比较好的启动方法是降低电源电压启动; 只要满足T≥ 1 .1~1 .2 TL 即可启动; 这时IS ≤Iamax ..启动过程中; 随着转速不断升高逐渐提高电源电压; 始终保持Ia ≤Iamax 这个条件; 直至U = UN ; 启动便结束了..如果通过自动控制使启动过程中始终有Ia = Iama x 为最理想..3-113-12他励直流电动机启动前; 励磁绕组断线; 启动时; 在下面两种情况下会有什么后果:1 空载启动;2 负载启动; TL = TN ..答:他励直流电动机励磁绕组断线; 启动过程中磁通则为剩磁磁通; 比ΦN 小很多..1 空载启动当最初启动电流IS ≤Iamax 时; 启动转矩TS 就会比空载转矩M0 大很多; 因此电动机可以启动; 但启动过程结束后的稳态转速则非常高; 因为稳定运行时要满足Ea≈UN ; Ea = CeΦn ; Φ很小; n就很高; 机械强度不允许; 电动机会损坏..2 负载启动; TL = TN当Ia ≤Iama x 时; 电磁转矩比负载转矩TL 小; 电动机不启动..这样如果采用降压启动时; 电源电压继续上升; 电枢电流继续增大; 电磁转矩T 继续增大; 从动转矩来讲会达到大于1 .1 TN ; 但是由于Φ很小; 会使电枢电流远远超过Iamax ; 不能换向; 同时也会由于过热而损坏电动机..当然; 用电枢串电阻启动的结果也相同..3-13 略3-14略3-15用电动机惯例时;他励直流电动机电磁功率PM=EaIa=TΩ<0;说明了电动机电能量转换的方向是机械功率转换成电功率;那么是否可以认为该电动机运行于回馈制动状态;或者说是一台他励直流发电机为什么答:1他励直流电动机运行时PM<0;说明T与n方向相反;因此电动机运行于制动状态..2制动运行状态包括回馈制动运行、能耗制动运行、反接制动过程及倒拉反转等制动状态;而直流发电机状态仅仅是回馈制动运行这一种..3因此;仅仅从PM<0说明电动机是一台发电机的看法是错误的..4运行于回馈制动运行状态的条件是:① PM<0;②P1=UIa<0;也就是说;机械功率转变成电功率后还必须回送给电源.. 3-163-173-18略 3-19一台他励直流电动机的P N =17kW;U N =110V;I N =185A;n N =1000r/min;已知电动机最大允许电流I max =1.8I N;电动机拖动T L =0.8T N 负载电动运行..试求:1采用能耗制动停车;电枢应串入多大电阻 2采用电压反接制动停车;电枢应串入多大电阻解:1065.018510171851103232232=⨯-⨯=-=N N N N a I P I U R 1.01000065.0185110=⨯-=-=ΦN a N N N e n R I U Cmin /10041858.01.0065.01.0110r I C R C U n a N e a N e N =⨯⨯-=Φ-Φ=N B a N e B a a B I R R n C R R E I =+Φ=+=11 1858.1065.010011.01⨯=+⨯B RΩ=24.01B R 2N B a N e B a a B I R R n C U R R E U I 8.122=+Φ+=++=1858.1065.010011.01102⨯=+⨯+B RΩ=56.02B R3-203-21 略4-1为什么加负载后直流电动机的转速会降低;它的实质是什么 答:当负载电流增大后;电枢电阻上压降增大;使E 减小;导致转速n 必然下降..实质是电枢电阻的存在导致压降增大..4-2什么叫调速范围、静差率 它们之间有什么关系 怎样才能扩大调速范围①调速范围——电动机在额定负载下调速时;允许的最高转速max n 与最低转速min n 之比叫做调速范围;用D 表示;即minmaxn n D =②静差率——当系统在某一转速下运行时;负载由理想空载增加到额定值所对应的转速降落N n ∆与理想空载转速0n 之比;称作静差率S ;即0Nn n S ∆=③直流变压调速系统中调速范围、静差率和额定速降之间的关系为)1(s n s n D N N -∆=④采用闭环控制方式;使转速降落N n ∆能够大幅度下降;才能在保证静差率S 不变的前提下扩大调速范围..4-3直流电动机为PN=74kW;UN=220V;IN=378A;nN=1430r/min;Ra=0.023Ω..相控整流器内阻Rrec=0.022Ω..采用降压调速..当生产机械要求s=20%时;求系统的调速范围..解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-⨯=378(0.0230.022)0.1478115N n I R Ce rpm ∆==⨯+=[(1)]14300.2[115(10.2)] 3.1N D n S n s =∆-=⨯⨯-=就是公式的转换 4-4:4-54-61234-74-8 某调速系统的开环放大系数为15时;额定负载下电动机的速降为8 r/min;如果将开环放大系数提高到30;它的转速降为多少 在同样静差率要求下;调速范围可以扩大多少倍解:根据 Kn n +∆=∆1opcl ;在K = 15时;求出1288)151()1(cl op =+=∆+=∆n K n r/min 当K 2=30时;求得min r/13.430112812op cl2=+=+∆=∆K n n再根据)1(s n s n D N N -∆=;在同样静差率要求下94.113.4822==∆∆=n n D D cl cl 答:如果开环放大系数提高到30;它的转速降为4.13r/min ;在同样静差率要求下;调速范围可以扩大到1.94倍..4-10 略4-114-12 4-134.144-152.抑制负载转矩3.可以..4-16区别是有无独立的加速度环和补偿的方式不同;前者是前馈补偿;后者是转速环的补偿.. 因为扰动计算机的原理是加入了前馈补偿所以是前馈方法..4-17 略4-18 略5-1同步电机与异步电机在结构上有什么不同和相同之处与他励直流电动机的结构有何不同同步电机和异步电机的定子绕组是相同的;主要区别在于转子的结构..同步电机的转子上有直流励磁绕组;所以需要外加励磁电源;通过滑环引入电流;而异步电机的转子是短路的绕组;靠电磁感应产生电流..相比之下;同步电机较复杂;造价高..他励直流电动机是利用换向器来自动改变线圈中的电流方向;从而使线圈受力方向一致而连续旋转的..同步与异步电机由定子和转子组成;定子就是电磁铁;转子就是线圈..而定子和转子是采用同一电源的;所以;定子和转子中电流的方向变化总是同步的;即线圈中的电流方向变了;同时电磁铁中的电流方向也变5-21鼠笼式异步电机的鼠笼式转子如何产生感应电流从而变成磁铁的当电动机的三相定子绕组各相差120度电角度;通入三相对称交流电后;将产生一个旋转磁场;该旋转磁场切割转子绕组;从而在转子绕组中产生感应电流转子绕组是闭合通路;载流的转子导体在定子旋转磁场作用下将产生电磁力;从而变成磁铁..2鼠笼式异步电机能否工作在发电状态该电机被原动机拖动旋转并在定子电端口接上无缘负载时电机是否可以发出电来可以工作在发电状态..不能发出点电;缺少励磁电流..3用原动机拖动永磁同步机电动机旋转;电端口接无缘负载;此时电动机能否做发电机用为什么可以原动机拖动转子旋转给电机输入机械能;极性相间的励磁磁场随轴一起旋转并顺次切割定子各相绕组相当于绕组的导体反向切割励磁磁场..由于电枢绕组与主磁场之间的相对切割运动;电枢绕组中将会感应出大小和方向按周期性变化的三相对称交变电势..通过引出线;即可提供交流电源..5-31异步电动机的俩种转子结构和同步电动机的俩种转子结构异步分为鼠笼式笼型转子和绕线型转子..鼠笼式笼型转子是在转子铁芯槽中镶入铜条组成;工艺较简单;功率因数较低..绕线型转子是用绝缘导线做成三相绕组嵌入转子槽中;可以通过串接电阻降低启动电流和调速..功率因数较高..同步由定子和转子两大部分组成.. 两种结构主要区别在转子上面有凸极式和隐极式同步电动机的定子同步电动机的定子与异步电动机的定子结构基本相同;由机座、定子铁芯、电枢绕组等组成.. 于大型同步电动机;由于尺寸太大;硅钢片常制成扇形;然后对成圆形..同步电动机的转子由磁极、转轴、阻尼绕组、滑环、电刷等组成;在电刷和滑环通入直流电励磁;产固定磁极.. 根据容量大小和转速高低转子结构分凸极和隐极两种..凸极特点:气隙不均匀;有明显的磁极;转子铁芯短粗;适用于转速低于1000r/min;极对数p≥3的电动机隐极特点:气隙均匀;无明显的磁极;转子铁芯长细;适用于转速高于1500r/min;极对数p≤2的电动机..(2)发电和电动状态下绕组的相轴是否变化不知道3电机的电角度和机械角度有什么关系电角频率和机械角频率有什么关系电角度=机械角度×极对数电角度就是定子电流频率角速度相当于机械频率电角频率w=np机械角频率Ω5-4 1略2略5-51单相整距线圈流过正弦电流产生的磁动势是一个在空间呈矩形波分布的脉振磁动势它既是时间函数又是空间函数即:矩形波的振幅随时间以正弦电流的频率按正弦规律变化而在任一时刻该矩形波本身又是在空间分布的是空间位置的函数..单相整距线圈流过正弦电流产生的磁动势是一个在空间呈矩形波分布的脉振磁动势;它既是时间函数又是空间函数;即:矩形波的振幅随时间以正弦电流的频率按正弦规律变化;而在任一时刻该矩形波本身又是在空间分布的;是空间位置的函数..5-6--------5-9 略5-105-11略5-125-131同时连过定子、转子两个绕组的磁通为主磁通;仅连过定子绕组或仅连过转子绕组的磁通为漏磁通.. 2略35-141转子绕组开路时;定子电流是励磁电流I0;其值较小..转子堵转时;短路的转子绕组中的电流产生磁动势F2;相应地;定子磁动势中出现与之平衡的分量-F2;使F1的数值增大;即满足磁动势平衡关系F1+F2=F0..因此;定子电流I1要比I0大2堵转时;气隙旋转磁场相对转子绕组运动;在转子绕组中产生电动势和电流..转子电流与气隙磁场相互作用;产生电磁转矩..根据右手定则;可以确定转子电流的方向;再利用左手定则;就可判断出电磁转矩的方向与气隙旋转磁场的转向相同..此时;转子是由于被堵住而不能旋转起来..5-15 略5-16 1具体内容:频率折算;绕组折算;电流折算;电动势折算;阻抗折算2线电压5-17略5-185-19 5-205-215-22 略6-1.P230 换向器换向能力差6-2.P232三相异步电动机的7种转速方式三相异步电动机转速公式为:n=60f/p1-s变极对数调速方法; 变频调速方法; 串级调速方法; 绕线式电动机转子串电阻调速方法; 定子调压调速方法; 电磁调速电动机调速方法;液力耦合器调速方法.同步电动机的转速恒等于同步转速;所以同步电动机的调速方法只有变频调速一种方法..6-36-4.36-5 VSI:C存在;C的作用是滤波和吸收无功功率;适合感性负载CSL:L存在;L的作用是滤波和吸收无功功率;适合容性负载6-6略6-7略6-836-106-11略6-126-136-14---------6-20 略8-110极电机的极对数为5;18极为9;同步的是:转速=60频率/极对数;异步的是:转速=60频率1-转差率/极对8-2 1交轴也叫q轴;直轴也叫d轴;他们实际上是坐标轴;而不是实际的轴在永磁同步电机控制中;为了能够得到类似直流电机的控制特性;在电机转子上建立了一个坐标系;此坐标系与转子同步转动;取转子磁场方向为d轴;垂直于转子磁场方向为q轴;将电机的数学模型转换到此坐标系下;可实现d轴和q轴的解耦;从而得到良好控制特性..要用双反应理论;即把电枢反应磁动势分解成垂直和平行于电动势^E0的两个分量~Fad和~Faq;它们分别产生直轴电枢反应磁通ψad和交轴电枢反应磁通ψaq;相应的电流也分解成两个分量..因此或 Ead=IdXad Xd=Ead/Id Id∝Fad∝ψad∝Ead 或 Eaq=IqXaq Xq=Eaq/Iq Iq∝Faq∝ψaq∝Eaq;由于直轴磁路的磁导比交轴磁路的磁导要大得多;同样大小的电流产生的磁通和相应的电动势也大的多;所以电抗Xd>Xq..23 从原理上讲永磁同步电机分隐极和凸极;凸极电机交直轴电感不等;比如说插入式结构的电机;转子永磁磁钢的磁导率跟空气磁导率接近;插入永磁体部分的这一段气隙磁路的磁阻大部分为气隙宽度加磁体厚度这部分对应于空气磁导率的磁路提供;即D轴;而没有磁体的部分磁路就是气隙的空气磁导率对应的磁阻;即Q轴..因此Lq大些..8-3略8-41238-5 略8-6一台励磁式隐极同步电动机增大励磁电流时;最大电磁转矩是否增大否;其最大电磁功率是否增大是8-7P335 a图8-8 这种情况下电机的转速是不会降低的;仍为同步转速空载运行..因为在这种情况下;虽然失去励磁使励磁电磁功率为零;但还有凸极电磁功率及相对应的电磁转矩;这个电磁转矩足能维持电动机的空载运行..8-9 磁链方程:磁链和电机的电感;电流有关;从电机的结果和磁材料的饱和特性上说;还和磁路的饱和程度有关;转矩方程:转子产生机械功率;旋转磁场对转子做功:电压矩阵方程:8-10组成:变压变频器;永磁或磁阻式同步电动机;转子位置传感器用于探知转子的位置..传感器的控制单元必须知道转子的准确位置;以便计算出环绕的定子磁场所需要的相电压电子传感器控制的整流8-11控制原动力的转速8-13正弦波永磁同步电动机谐波少转矩的精度高;多用于伺服系统和高性能的调速系统;梯形波永磁同步电动机由于各项电流是方波;逆变器的电压只需按直流PWN的方法进行控制..。
《电机与运动控制系统》课后习题参考答案 (2)

《电机与运动控制系统》课后习题参考答案第一章磁路(5题)1-1.一环形铁心,平均路径长度为36cm,横截面为3cm2,上绕400的线圈。
当励磁电流为1.4A时,铁心中的磁通为1.4⨯10-3Wb。
试求:(1)磁路的磁阻;(2)此时铁心的磁导率及相对磁导率。
[400⨯103A/Wb;0.003H/m,2400]解:①.R m=F/Φ=IW/Φ= 1.4⨯400/(1.4⨯10-3)=400000=400⨯103(A/Wb);②.μ=l/(S⨯R m)=0.36/(0.0003⨯400⨯103)=0.003(H/m);③.μr=μ/μ0=0.003/(4π⨯10-7)=2387.3241。
答:(1)磁路的磁阻为:400⨯103A/Wb;(2)此时铁心的磁导率及相对磁导率分别为:0.003H/m和2400。
(答毕#)1-2.为了说明铁磁材料的磁导率随磁化状态而变化的情况,根据硅钢片的B-H曲线(图1-2-3)试计算:当磁密分别为0.8T、1.2T和1.6T 时,其磁导率和相对磁导率各为多少?说明磁导率与饱和程度有什么关系?[3.8⨯10-3H/m;3040;1.7⨯10-3H/m,1360;0.4⨯10-3H/m,320]解:①.由硅钢片的B-H曲线(图1-2-3)查得:当磁密分别为0.8T、1.2T和1.6T时,磁场强度分别为:0.2⨯103A/m、0.7⨯103A/M和4.25⨯103A/m。
根据μ=B/H和μr=μ/μ0,其磁导率和相对磁导率各为:4⨯10-3H/m、1.7⨯10-3H/m、0.4⨯10-3H/m和3180、1364、300(近似值,计算结果:0.004、0.0017、0.000376和3183.0989、1364.1852、299.5858);②.由上述计算可知:硅钢片的磁导率随着饱和程度的增加而急剧减小[要得到0.8T的磁密,只需要磁场强度为:0.2⨯103A/m;而要得到1.6T的磁密,就需要磁场强度为:4.25⨯103A/m。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2-1安培环路定律P11,磁路的欧姆定律P12,电磁感应定律P19不一定可以,因为磁路是非线性的,存在饱和现象。
2-2磁阻和磁导与磁路的磁导率、长度和截面积有关,其中磁导率取决于磁路的饱和程度,即磁通密度的大小。
2-3Φ2>Φ1 B2=B1Φ2=Φ1 B1>B22-4 (1)如果工作时进入磁饱和区,设备发热加剧,影响设备正常运行。
P15 P16(2)2-5 P242-6(1)P23(2)2-7 P242-8 (1)瞬态值(2)平均值2-9无功功率铁心损耗P372-10(1)P35 P39(2)P422-11 P39 重置前后磁动势不变P402-12 P37 大好2-13 因素:①铁芯材质,磁路结构②磁感应强度③原边和副边的绕线方式,顺序④线圈结构2-142-15 增大2-16 P422-172-18E1=-j4*44fW1ΦmE2 =-j4*44fW2Φm2-192-20 N1=W1 N2=W2(1)换向器在直流电机中起什么作用?答:在直流发电机中, 换向器起整流作用, 即把电枢绕组里的交流电整流为直流电, 在正、负电刷两端输出。
在直流电动机中,换向器起逆变作用, 即把电刷外电路中的直流电经换向器逆变为交流电输入电枢元件中。
(2)直流电机的主磁路由哪几部分组成?磁路未饱和时,励磁磁通势主要消耗在哪一部分上?答:直流电机的主磁路由以下路径构成: 主磁极N 经定、转子间的空气隙进入电枢铁心, 再从电枢铁心出来经定、转子间的空气隙进入相邻的主磁极S, 经定子铁心磁轭到达主磁极N, 构成闭合路径。
励磁磁通势主要消耗在空气隙上。
3-2直流电机的铭牌上的额定功率是指什么功率?答:对于直流发电机,是指输出的电功率;对于直流电动机,是指输出的机械功率。
3-33-4直流发电机的损耗主要有哪些? 铁损耗存在于哪一部分, 它随负载变化吗? 电枢铜损耗随负载变化吗?答:直流发电机的损耗主要有: (1 ) 励磁绕组铜损耗; ( 2 ) 机械摩擦损耗; ( 3) 铁损耗; ( 4 )电枢铜损耗; ( 5 ) 电刷损耗; ( 6 ) 附加损耗。
铁损耗是指电枢铁心在磁场中旋转时硅钢片中的磁滞和涡流损耗。
这两种损耗与磁密大小以及交变频率有关。
当电机的励磁电流和转速不变时, 铁损耗也几乎不变。
它与负载的变化几乎没有关系。
电枢铜损耗由电枢电流引起, 当负载增加时, 电枢电流同时增加, 电枢铜损耗随之增加。
电枢铜损耗与电枢电流的平方成正比。
3-5 P55页电枢电流,励磁电流3-6 P57页电动:n Te 同方向发电:n Te 反方向1.3电动2.4发电(1.2.3.4为罗马数字)为各量的实际运动方向提供参考3-7 1.略2.是3-8略3-93-10 1.先励磁再电枢2.一般的他励直流电动机为什么不能直接启动? 采用什么启动方法比较好?答:他励直流电动机启动时由于电枢感应电动势Ea =CeΦn = 0 , 最初启动电流IS =URa, 若直接启动, 由于Ra 很小, IS 会十几倍甚至几十倍于额定电流, 无法换向, 同时也会过热, 因此不能直接启动。
比较好的启动方法是降低电源电压启动, 只要满足T≥(1 .1~1 .2 ) TL 即可启动, 这时IS ≤Iamax 。
启动过程中, 随着转速不断升高逐渐提高电源电压, 始终保持Ia ≤Iamax 这个条件, 直至U = UN , 启动便结束了。
如果通过自动控制使启动过程中始终有Ia = Iama x 为最理想。
3-113-12他励直流电动机启动前, 励磁绕组断线, 启动时, 在下面两种情况下会有什么后果:(1 ) 空载启动;(2 ) 负载启动, TL = TN 。
答:他励直流电动机励磁绕组断线, 启动过程中磁通则为剩磁磁通, 比ΦN 小很多。
(1 ) 空载启动当最初启动电流IS ≤Iamax 时, 启动转矩TS 就会比空载转矩M0 大很多, 因此电动机可以启动, 但启动过程结束后的稳态转速则非常高, 因为稳定运行时要满足Ea≈UN , Ea = CeΦn , Φ很小, n就很高, 机械强度不允许, 电动机会损坏。
(2 ) 负载启动, TL = TN当Ia ≤Iama x 时, 电磁转矩比负载转矩TL 小, 电动机不启动。
这样如果采用降压启动时, 电源电压继续上升, 电枢电流继续增大, 电磁转矩T 继续增大, 从动转矩来讲会达到大于1 .1 TN , 但是由于Φ很小, 会使电枢电流远远超过Iamax , 不能换向, 同时也会由于过热而损坏电动机。
当然, 用电枢串电阻启动的结果也相同。
3-13 略3-14略3-15用电动机惯例时,他励直流电动机电磁功率PM=EaIa=TΩ<0,说明了电动机电能量转换的方向是机械功率转换成电功率,那么是否可以认为该电动机运行于回馈制动状态,或者说是一台他励直流发电机?为什么?答:(1)他励直流电动机运行时PM<0,说明T与n方向相反,因此电动机运行于制动状态。
(2)制动运行状态包括回馈制动运行、能耗制动运行、反接制动过程及倒拉反转等制动状态,而直流发电机状态仅仅是回馈制动运行这一种。
(3)因此,仅仅从PM<0说明电动机是一台发电机的看法是错误的。
(4)运行于回馈制动运行状态的条件是:① PM<0,②P1=UIa<0,也就是说,机械功率转变成电功率后还必须回送给电源。
3-163-173-18略 3-19一台他励直流电动机的P N =17kW ,U N =110V ,I N =185A ,n N =1000r/min ,已知电动机最大允许电流I max =1.8I N ,电动机拖动T L =0.8T N 负载电动运行。
试求:(1)采用能耗制动停车,电枢应串入多大电阻?(2)采用电压反接制动停车,电枢应串入多大电阻?解:(1)065.018510171851103232232=⨯-⨯=-=N N N N a I P I U R 1.01000065.0185110=⨯-=-=ΦN a N N N e n R I U Cmin /10041858.01.0065.01.0110r I C R C U n a N e a N e N =⨯⨯-=Φ-Φ=N B a N e B a a B I R R n C R R E I =+Φ=+=11 1858.1065.010011.01⨯=+⨯B RΩ=24.01B R (2)N B a N e B a a B I R R n C U R R E U I 8.122=+Φ+=++=1858.1065.010011.01102⨯=+⨯+B RΩ=56.02B R3-203-21 略4-1为什么加负载后直流电动机的转速会降低,它的实质是什么?答:当负载电流增大后,电枢电阻上压降增大,使E 减小,导致转速n 必然下降。
实质是电枢电阻的存在导致压降增大。
4-2什么叫调速范围、静差率?它们之间有什么关系?怎样才能扩大调速范围?①调速范围——电动机在额定负载下调速时,允许的最高转速max n 与最低转速min n 之比叫做调速范围,用D 表示,即minmaxn n D =②静差率——当系统在某一转速下运行时,负载由理想空载增加到额定值所对应的转速降落N n ∆与理想空载转速0n 之比,称作静差率S ,即0Nn n S ∆=③直流变压调速系统中调速范围、静差率和额定速降之间的关系为)1(s n s n D N N -∆=④采用闭环控制方式,使转速降落N n ∆能够大幅度下降,才能在保证静差率S 不变的前提下扩大调速范围。
4-3直流电动机为PN=74kW,UN=220V ,IN=378A ,nN=1430r/min ,Ra=0.023Ω。
相控整流器内阻Rrec=0.022Ω。
采用降压调速。
当生产机械要求s=20%时,求系统的调速范围。
解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-⨯=378(0.0230.022)0.1478115N n I R Ce rpm ∆==⨯+=[(1)]14300.2[115(10.2)] 3.1N D n S n s =∆-=⨯⨯-=(就是公式的转换!) 4-4:4-54-6(1)(2)(3)4-74-8 某调速系统的开环放大系数为15时,额定负载下电动机的速降为8 r/min ,如果将开环放大系数提高到30,它的转速降为多少?在同样静差率要求下,调速范围可以扩大多少倍?解:根据 Kn n +∆=∆1opcl ,在K = 15时,求出1288)151()1(cl op =+=∆+=∆n K n r/min 当K 2=30时,求得min r/13.430112812op cl2=+=+∆=∆K n n再根据)1(s n s n D N N -∆=,在同样静差率要求下94.113.4822==∆∆=n n D D cl cl 答:如果开环放大系数提高到30,它的转速降为4.13r/min ;在同样静差率要求下,调速范围可以扩大到1.94倍。
4-10 略4-114-124-134.144-15(2).抑制负载转矩(3).可以。
4-16区别是有无独立的加速度环和补偿的方式不同,前者是前馈补偿,后者是转速环的补偿。
因为扰动计算机的原理是加入了前馈补偿所以是前馈方法。
4-17 略4-18 略5-1同步电机与异步电机在结构上有什么不同和相同之处?与他励直流电动机的结构有何不同?同步电机和异步电机的定子绕组是相同的,主要区别在于转子的结构。
同步电机的转子上有直流励磁绕组,所以需要外加励磁电源,通过滑环引入电流;而异步电机的转子是短路的绕组,靠电磁感应产生电流。
相比之下,同步电机较复杂,造价高。
他励直流电动机是利用换向器来自动改变线圈中的电流方向,从而使线圈受力方向一致而连续旋转的。
同步与异步电机由定子和转子组成,定子就是电磁铁,转子就是线圈。
而定子和转子是采用同一电源的,所以,定子和转子中电流的方向变化总是同步的,即线圈中的电流方向变了,同时电磁铁中的电流方向也变5-2(1)鼠笼式异步电机的鼠笼式转子如何产生感应电流从而变成磁铁的?当电动机的三相定子绕组(各相差120度电角度),通入三相对称交流电后,将产生一个旋转磁场,该旋转磁场切割转子绕组,从而在转子绕组中产生感应电流(转子绕组是闭合通路),载流的转子导体在定子旋转磁场作用下将产生电磁力,从而变成磁铁。
(2)鼠笼式异步电机能否工作在发电状态?该电机被原动机拖动旋转并在定子电端口接上无缘负载时电机是否可以发出电来?可以工作在发电状态。
不能发出点电,缺少励磁电流。
(3)用原动机拖动永磁同步机电动机旋转,电端口接无缘负载,此时电动机能否做发电机用?为什么?可以原动机拖动转子旋转(给电机输入机械能),极性相间的励磁磁场随轴一起旋转并顺次切割定子各相绕组(相当于绕组的导体反向切割励磁磁场)。