(完整版)西门子PLC常用通讯
常用西门子WINCC与西门子PLC通讯连接方式
西门子WINCC6.0与SiemensPLC通讯连接有多种方式,下面介绍两种常用的通讯方式。
一、采用普通网卡通过TCP/IP与PLC通讯,通过以太网实现WICC6.0与PLC系统连接的前提条件是PLC系统配置有以太网模块或者使用带PN接口的PLC,以太网模块如CP443-1或者CP343-1,带PN接口的PLC如CPU 315-2PN/DP。
以下为采用普通网卡CP443-1的通讯连接。
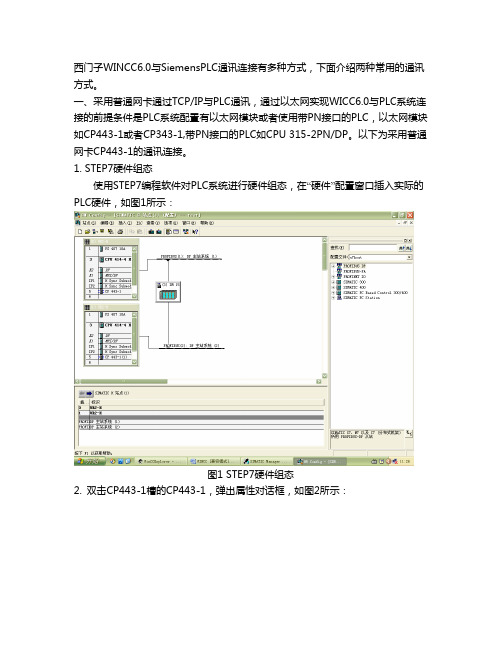
1. STEP7硬件组态使用STEP7编程软件对PLC系统进行硬件组态,在“硬件”配置窗口插入实际的PLC硬件,如图1所示:图1 STEP7硬件组态2. 双击CP443-1槽的CP443-1,弹出属性对话框,如图2所示:图2 CP443-1属性对话框3. 点击图2属性对话框,弹出网络参数设置对话框,点击“新建”按钮,新建一个以太网络,输入以太网模块CP443-1的IP地址,通常情况下,不需要启用网关。
如图3所示:图3 参数设置注意事项:如果采用TCP/IP协议通讯方式,必须启动“正在使用IP协议”,将组态好的硬件下载到CPU,则PLC设置完成了!4. 设置安装WINN6.0(通常为工程师站ES和操作员站OS)计算机Windows操作系统的TCP/IP参数,将WINN组态计算机的IP地址设置成为与PLC以太网通讯模块或者PN接口地址保持在一个网段内。
如图4所示:图4 设置计算机IP地址5. 添加新的驱动程序和设置系统参数,打开新创建的工程“test”,在项目管理栏里选择“变量管理”,单击右键选择“添加新的驱动程序”,如图5所示。
图5 添加驱动程序6. 在添加新的驱动程序文件夹里选择“SIMATIC S7 Protocol Suite.chn”,如6所示:图6 驱动程序7. 右键单击TCP/IP,在弹出菜单中点击“系统参数”,如图7所示。
弹出“系统参数-TCP/IP对话框”,选择“单元”标签,查看“逻辑设备名称”,一般默认安装后,逻辑设备名为CP-TCP/IP。
西门子PLC的以太网通讯及OPC通讯介绍
西門子PLC的以太網通訊及OPC通訊介紹1.以太網通訊CAL有很多地方用到以太網通訊,L2,焊機與PLC間通訊等,表檢的成像原理為:在金屬板帶表面沒有缺陷時,反射的光在明視場下很強,而在暗視場的散射光很弱;如有缺陷,則明視場的光強減弱,而暗視場的光強增加。
根據這個原理,通過檢測攝像頭裡光強的變化,可檢測出材料表面上的一些物理缺陷。
CAL 僅僅用到了它的檢測破孔這一個功能。
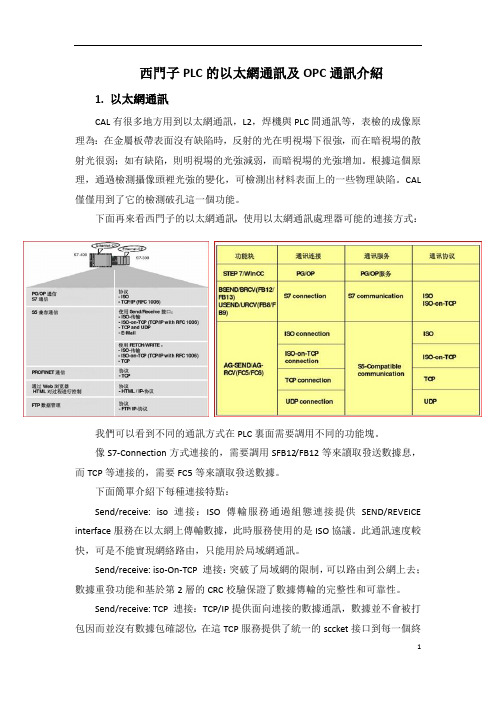
下面再來看西門子的以太網通訊,使用以太網通訊處理器可能的連接方式:我們可以看到不同的通訊方式在PLC裏面需要調用不同的功能塊。
像S7-Connection方式連接的,需要調用SFB12/FB12等來讀取發送數據息,而TCP等連接的,需要FC5等來讀取發送數據。
下面簡單介紹下每種連接特點:Send/receive: iso 連接:ISO傳輸服務通過組態連接提供SEND/REVEICE interface服務在以太網上傳輸數據,此時服務使用的是ISO協議。
此通訊速度較快,可是不能實現網絡路由,只能用於局域網通訊。
Send/receive: iso-On-TCP 連接:突破了局域網的限制,可以路由到公網上去;數據重發功能和基於第2層的CRC校驗保證了數據傳輸的完整性和可靠性。
Send/receive: TCP 連接:TCP/IP提供面向連接的數據通訊,數據並不會被打包因而並沒有數據包確認位,在這TCP服務提供了統一的sccket接口到每一個終端,因而數據塊可以整體發送,這裡區別於iso-On-TCP 連接。
Send/receive: UDP連接:UDP提供簡單數據傳輸,無需確認,與TCP同屬第4層協議。
與TCP相比,UDP屬於無連接的協議,數據報文無需確認。
S7通信:S7協議是西門子S7家族的標準通信協議,使用S7應用接口的通信不依賴特定的總線系統(Ethernet,PROFIBUS,MPI)。
接口位於ISO-OSI參考模型的第7層,下面圖模型各層的通信方式。
西门子plc网口所有通讯

西门子plc网口所有通讯西门子PLC(可编程逻辑控制器)是一种常用于自动化控制系统的设备,它在工业领域发挥着重要的作用。
在PLC的通信中,网口的使用至关重要。
本文将探讨西门子PLC网口的通信方法、通信协议以及其在工业控制系统中的重要性。
一、西门子PLC网口通讯的方法西门子PLC的网口通讯方法主要有两种:以太网通信和串行通信。
以太网通信以其高速、稳定的特点,被广泛应用于工业自动化控制系统。
而串行通信则适用于一些简单的控制需求,以及与老式设备的通信。
以太网通信是指通过以太网协议来进行数据传输,可以实现PLC与上位机、人机界面、其他PLC之间的通讯。
西门子PLC网口支持多种以太网通信协议,如TCP/IP、UDP、HTTP等。
其中,TCP/IP协议是最常用的通信协议,它通过IP地址和端口号来实现设备之间的连接和数据传输。
串行通信是指通过串行接口(通常为RS485或RS232)来进行数据传输。
串行通信的优势在于线路简单、成本低廉,适用于长距离传输。
在PLC控制系统中,串行通信常用于连接传感器、触摸屏、读卡器等外设,以实现对这些设备的控制和数据采集。
二、西门子PLC网口通讯的协议在进行PLC网口通讯时,需要使用特定的通讯协议来实现数据的传输和解析。
针对西门子PLC的网口通讯,常用的通讯协议有S7协议和Modbus协议。
S7协议是西门子PLC的专有通讯协议,它通过发送和接收特定的数据报文来实现与PLC的通讯。
S7协议使用基于ISO/OSI模型的通讯机制,具有高效、稳定的特点。
同时,S7协议还支持多种通信方式,如TCP/IP连接、ISO/IEC指令、用户自定义指令等。
通过S7协议,可以实现与西门子PLC的实时数据交互和控制。
Modbus协议是一种通用的串行通讯协议,广泛应用于工业自动化领域。
Modbus协议使用简单、易于理解的数据传输方式,支持RTU和ASCII两种传输格式。
通过Modbus协议,可以实现不同设备之间的数据共享和远程控制。
西门子连接id_西门子PLC的TCP通讯(不同项目下)①--TSEND_C指令

西门⼦连接id_西门⼦PLC的TCP通讯(不同项⽬下)①--TSEND_C指令西门⼦PLC的TCP通讯(不同项⽬下)①--TSEND_C指令本期说⼀下,不同项⽬下的,连个西门⼦1200的TCP通讯,这次我们⽤TSEND_C和TRCV_C组合使⽤,这次先了解下TSEND_C指令是⼤概啥样的1.0 从右边指令栏--通信--开放式⽤户通讯--其他,选择TSEND_C拖动到程序1中,如下图2.0 下⾯说下具体这个指令块的参数设置REQ:指的是上升沿触发,发送作业,跟建⽴通讯⽆关,这个就是跟之前TSEND的区别!ID:是指向已分配连接的指向CONT:当为0时断开通信连接,当为1时建⽴并保持通讯连接LEN:需要发送的最⼤字节长度,如果这个值设为0就会发送DATA指定的所有数据,如果LEN的值⼤于DATA定义的待发送数据的长度,⽐如DATA⾥⾯设定数据长度10个字节,LEN就不能⼤于10,不然指令参数STATUS会输出错误代码8088,当数据块是优化访问权限的结构化变量时,LEN=0,可传送最⼤字节数65534DATA:指向发送区的指针,该发送区包含要发送数据的地址和长度,传送结构时,发送端和接收端的结构必须相同,这边要特别说明下指针,如下图,我们的指针是这样写的P#DB2.DBX0.0 BYTE 10,这句话的意思是指针指向DB2数据块,从DB块地址0.0开始的10个字节的数据,这样发送区就包含了数据的地址DB2的地址0.0,数据的长度10个字节,当头那个P指的是ANY数据类型的表⽰⽅式,ANY数据类型实际是80位指针类型数据DONE:状态参数,为0时作业未启动或扔在执⾏,为1时作业已执⾏,且⽆任何错误,完成后会⾃动复位,需要⾃⼰锁存状态,来判断连接情况BUSY:状态参数,为0时作业未启动或已完成,为1时作业执⾏中,⽆法开始新作业ERROR;错误参数,为0时⽆错误,为1时有错误报警注意:TSEND是异步执⾏的,所有需要在参数DONE或者参数ERROR的值变为1之前,发送区的数据要保持⼀致不要改动STATUS:指令的状态这⾥在说下⼀个检查连接的指令T_DIAG,这个是通过ID来检测通讯连接情况,如下图,这⾥先简单说下,后⾯测试的时候再试试,参数⼤多数都差不多,这⾥就说⼀个参数如下图,RESULT这个参数是⽤来存储连接状态的,这个参数要⽤特定的系统数据参数结构,TDiag_StatusExt和TDiag_Status,T_DIAG: 检查连接 (S7-1200, S7-1500),TDiag_Status”结构只包含有关连接端点的最重要信息,例如,使⽤的协议、连接状态和发送或接收的数据字节数。
西门子PLC 自由口通讯
1.自由口通讯基本概念1.1 自由口通信概述1.2 自由口通信要点1.3 发送和接收指令2.自由口通信使用指南2.1 通讯口初始化2.2 发送数据:2.3 接收数据2.4 自由口通信例程1.自由口通讯基本概念1.1 自由口通信概述S7-200PLC的通讯口支持RS485接口标准。
采用正负两根信号线作为传输线路。
工作模式采用串行半双工形式,在任意时刻只允许由一方发送数据,另一方接收数据。
数据传输采用异步方式,传输的单位是字符,收发双方以预先约定的传输速率,在时钟的作用下,传送这个字符中的每一位。
传输速率可以设置为1200、2400、4800、9600、19200、38400、57600、115200。
字符帧格式为一个起始位、7或8个数据位、一个奇/偶校验位或者无校验位、一个停止位。
字符传输从最低位开始,空闲线高电平、起始位低电平、停止位高电平。
字符传输时间取决于波特率。
数据发送可以是连续的也可以是断续的。
所谓连续的数据发送,是指在一个字符格式的停止位之后,立即发送下一个字符的起始位,之间没有空闲线时间。
而断续的数据发送,是指当一个字符帧发送后,总线维持空闲的状态,新字符起始位可以在任意时刻开始发送,即上一个字符的停止位和下一个字符的起始位之间有空闲线状态。
示例:用PLC连续的发送两个字符(16#55和16#EE)(程序如图3和图4),通过示波器测量CPU通讯端口管脚3/8之间的电压,波形如下图1.:图1.两个字符(16#55和16#EE)的波形图示例说明:16进制的16#55换算成2进制等于2#01010101,16进制的16#EE换算成2进制等于2#11101110。
如图所示,当数据线上没有字符发送时总线处于空闲状态(高电平),当PLC发送第一个字符16#55时,先发送该字符帧的起始位(低电平),再发送它的8个数据位,依次从数据位的最低位开始发送(分别为1、0、1、0、1、0、1、0),接着发送校验位(高电平或低电平或无)和停止位(高电平)。
西门子PLC Modbus通讯

1.Modbus RTU主站1.1 Modbus RTU 主站指令库1.2 Modbus RTU 主站功能编程1.3 关于 Modbus RTU 主站协议及地址1.4 Modbus RTU 主站常问问题1.5 Modbus RTU主站例程2.Modbus RTU从站2.1 CPU 上的通信口(Port0)支持 Modbus RTU 从站通信协议2.2 编程基本步骤:2.3 Modbus RTU 从站地址与S7-200的地址对应2.4 Modbus RTU 从站指令库支持的功能码2.6Modbus RTU从站例程2.7 Modbus RTU 从站常见问题3.STEP 7-Micro/WIN 的标准指令库3.1 分配库指令数据区1.Modbus RTU主站1.1 Modbus RTU 主站指令库西门子在 Micro/WIN V4.0 SP5 中正式推出 Modbus RTU 主站协议库(西门子标准库指令)。
图 1. 西门子标准指令库(Micro/WIN V4.0 SP5)Modbus指令库注意● 1. Modbus RTU 主站指令库的功能是通过在用户程序中调用预先编好的程序功能块实现的,该库对Port 0 和 Port 1 有效。
该指令库将设置通信口工作在自由口模式下。
● 2. Modbus RTU 主站指令库使用了一些用户中断功能,编其他程序时不能在用户程序中禁止中断。
● 3. Modbus RTU 主站库对CPU的版本有要求。
CPU 的版本必须为 2.00 或者 2.01(即订货号为6ES721*-***23-0BA*),1.22版本之前(包括1.22版本)的 S7-200 CPU 不支持。
使用 Modbus RTU 主站指令库,可以读写 Modbus RTU 从站的数字量、模拟量 I/O 以及保持寄存器。
要使用 Modbus RTU 主站指令库,须遵循下列步骤:● 1.安装西门子标准指令库● 2.按照要求编写用户程序调用 Modubs RTU 主站指令库1.2 Modbus RTU 主站功能编程1. 调用 Modbus RTU 主站初始化和控制子程序使用 SM0.0 调用 MBUS_CTRL 完成主站的初始化,并启动其功能控制:图 2. 用 SM0.0 调用 Modbus RTU 主站初始化与控制子程序各参数意义如下:a. EN 使能:必须保证每一扫描周期都被使能(使用 SM0.0)b. Mode 模式:为 1 时,使能 Modbus 协议功能;为 0 时恢复为系统 PPI 协议c. Baud 波特率:支持的通讯波特率为1200,2400,4800,9600,19200,38400,57600,115200。
西门子PLC之间的通讯
西门子PLC之间的通讯是怎么完成的S7-200通信最经济的方式就是采用PPI协议和自由口通信协议。
对于S7-200之间进行通信,PPI协议又更适合——它比自由口通信的编程更简单!下面就对这个PPI通信进行说明——以2台S7-200通信为例,做一个实例。
设备配置:1台S7-200 CPU 226CN的PLC、 1台S7-200 CPU 224XP的PLC硬件连接:原则上需要配备1条紫色的Profibus电缆、2个黑色的Profibus-DP接头。
如果需要在PLC通信时对所有在线的PLC进行监控/编程操作而不占用另外的通信口(也就是说,假如所有PLC用端口PROT1进行PPI通信,而现在要对所有PLC依次编程/监控,但又不想占用这些PLC的端口PROT0——端口PROT0可能已作它用),那么必须在其中1台PLC采用带编程口的Profibus-DP接头。
所以说,带编程口的Profibus-DP接头在整个网络中只需要一个就可以了。
这样,也就可以在某一台PLC处对在网的其它PLC进行编程/监控。
引脚分配:........S7--200 CPU上的通讯端口是符合欧洲标准EN 50170中PROFIBUS 标准的RS--485兼容9针D型连接器。
下表列出了为通讯端口提供物理连接的连接器,并描述了通讯端口的针脚分配。
下面是S7-200的通信接口——D型9孔母头的引脚定义。
网络电缆的偏压电阻和终端电阻为了能够把多个设备很容易地连接到网络中,西门子公司提供两种网络连接器:一种标准网络连接器(引脚分配如表7-7所示)和一种带编程接口的连接器,后者允许您在不影响现有网络连接的情况下,再连接一个编程站或者一个HMI 设备到网络中。
带编程接口的连接器将S7--200的所有信号(包括电源引脚)传到编程接口。
这种连接器对于那些从S7--200取电源的设备(例如TD200)尤为有用。
两种连接器都有两组螺钉连接端子,可以用来连接输入连接电缆和输出连接电缆。
西门子S7-300PLC的通讯

西门子S7-300PLC的通讯多点接口(MPI) 集成在CPU中,用于同时连接编程器、PC机、人机界面系统及其他SIMA TIC S7/M7/C7等自动化控制系统。
—- 用户可以方便的使用Step7软件进行通讯组态。
—- CPU 支持下列通讯类型:过程通讯通过总线(AS-i或PROFIBUS)对I/O模块周期寻址(过程映象交换)。
数据通讯在自动控制系统之间或人机界面(HMI)和几个自动控制系统之间,数据通讯会周期地进行或被用户程序或功能块调用。
通过PROFIBUS的过程通讯–—S7-300通过通讯处理器,或通过集成在C PU上的PROFIBU S-DP接口连接到P ROFI B U S-DP网络上。
—- 带有PROFIBUS-DP主站/从站接口的CPU可以使用户能够方便高效地进行组态。
—- 而且,用户通过PRO FIBUS-DP分布式I/O就像处理集中的I/O一样,具有相同的组态、地址和编程。
—- 下列设备可以作为通讯的主站:SIMATIC S7-300(通过带PROF IBUS-DP 接口CPU或通过PROFIBU S-DP)SIMATIC S7-400(通过带PROF IBUS-DP 接口的CPU或通过PROF IBUS-DP CP)SIMATIC C7(通过带PROF IBUS-DP接口的C7或通过PRO FIBUS-DP CP)S5-115U/h,S5-135U和带IM308的S5-155U/H带PROFIB U S-DP接口的S5-95USIMATIC 505—- 需要说明的是,在一条线上不要连接2个以上的主站。
—- 下列设备可以作为从站:ET200B/L/M/S/X分布式I/O设备通过CP342-5的S7-300CPU315-2 DP,CPU316-2 DP和CPU318-2 DPC7-633/p CP,C7-633 DP,C7-634/P DP,C7-634 DP,C7-626 DP虽然带有STE P7的编程器P G/PC或OP在总线中作为主站,但它们只使用部分通过PROFIBUS- DP运行的MP I功能。
西门子PLC通讯设置
西门子PLC通讯设置LT西门子系列 PLC 常规通讯配置方案第一节西门子 S7200 PLC组态王软件和S7200 PLC 可以通过一下通讯链路进行通讯,具体说明如下:1.串口通讯方式硬件连接:此种方式使用S7200 系列PLC 上的PPI 编程口,使用西门子标准编程电缆或标准485电缆链接到计算机串口上:当使用计算机的 RS232 通讯口时:建议使用西门子专用紫色电缆和网络接头+常规有源RS485/232 转换模块(如研华的ADAM4520)进行PLC 485 编程口和计算机标准232 口的连接;当使用计算机扩展RS485 口时:建议使用西门子专用紫色电缆和网络接头直接进行PLC RS485 编程口和计算机RS485 口的连接。
注意:PLC的PPI 口中9 针口:3―DATA+;8―DATA -适用场合:一般适用于一个PLC 和一台PC 进行直接串口通讯的场合,PLC和PC机之间距离较近;组态王对应驱动(常用直接驱动有3 个):(1)PLC→西门子→S7-200系列→PPI(2)PLC→西门子→S7-200系列→自由口(3)PLC→西门子→S7-200系列→Modbu s特殊软件需求:组态王所在的计算机不需要安装s7200 编程软件。
各自具体配置按照组态王对应驱动帮助执行即可。
注意:因为PPI 协议的特殊性,读取一个数据包一般需要400MS 的时间,当用户反馈PPI 通讯速度慢时,请以此标准分析用户工程通讯速度慢是否在合理的范围;如果在该驱动所支持的合理范围内,用户仍然不满意时,建议更换为自由口或modbus通讯方式。
当用户使用自由口或Modbus 通讯驱动时,需要向PLC 中下载对应协议程序,该程序由亚控提供。
用户必须在此通讯PLC􀃆西门子→S7-200系列→TCP特殊软件需求:无。
即不需要在组态王所在的计算机上安装STEP7 或Simatic net通讯软件,该驱动在组态王 6.52 及以前发布的光盘中还没有;组态王6.52 以后的版本中默认提供。
西门子S7-1500PLC在不同网段通讯常用的四种方法

西门子S7-1500PLC在不同网段通讯常用的四种方法1、通过路由的模式实现PLC间跨网段通讯▲ 图1通过路由的模式实现PLC间跨网段通讯两台PLC分属于不同网段,但有数据通讯的需求,最典型的应用就是使用路由的模式来实现。
在PLC侧需要使能“使用路由器”功能,并填写对应的网关地址,然后去调用相应的功能块进行通讯,如在S7-1500中调用TSEND_C和TRCV_C去实现TCP通讯;当然在两台PLC 间需要有支持路由功能的交换机来支持,如scalance xc208。
这种通讯架构的典型使用方式可参考图1的示意。
2、通过网关的模式实现PLC间跨网段通讯▲ 图2通过网关的模式来实现通讯两台PLC分属于不同网段,但还有实时通讯的需求,这时可以考虑Profinet通讯方式,通过PN/PN Coupler 网关来实现实时的数据交换功能。
PN/PN Coupler 具有两个Profinet接口,每个接口作为一个Profinet的Io Device链接到了各自的Profinet系统中,互连了两个PROFINET子网,实现了实时数据交互。
这种通讯架构的典型使用方式可参考图2的示意。
3、通过NAT的模式实现PLC间跨网段通讯▲图3通过NAT的模式来实现跨网段通讯两台PLC分属于不同网段,但有数据通讯的需求,还可以使用NAT技术来实现跨网段的数据交换。
这种通讯架构的典型使用方式可参考图3的示意。
两台PLC分属于不同网段,中间由一台支持NAT功能的设备互联,如SCALANCE S615,NAT设备将网段2的地址转换为网段1的一个地址,在通讯时,网段1的设备去访问转换后的地址即可实现两个设备的通讯。
4、通过增加附加通讯模块的模式实现PLC间跨网段通讯▲图4通过附加通讯模块的方式来实现两个设备的通讯两台PLC分属于不同网络,拥有不同网段的地址,但还有数据通讯的需求,还可以使用增加通讯模块的方式来实现两个设备的通讯。
这种通讯架构的典型使用方式可参考图4的示意。
常用西门子WINCC与西门子PLC通讯连接方式(汇编)
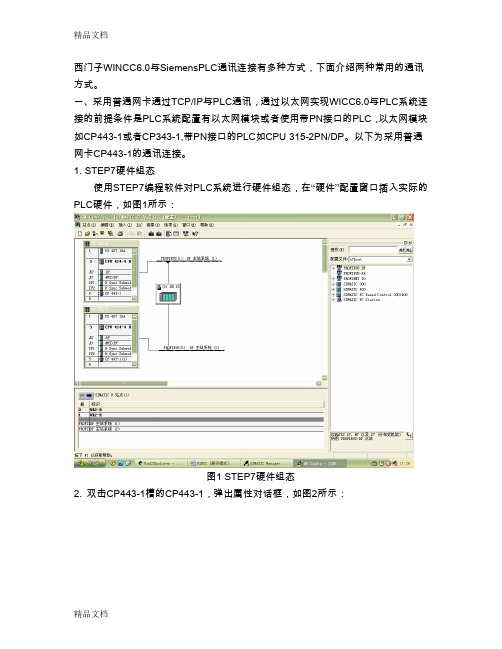
西门子WINCC6.0与SiemensPLC通讯连接有多种方式,下面介绍两种常用的通讯方式。
一、采用普通网卡通过TCP/IP与PLC通讯,通过以太网实现WICC6.0与PLC系统连接的前提条件是PLC系统配置有以太网模块或者使用带PN接口的PLC,以太网模块如CP443-1或者CP343-1,带PN接口的PLC如CPU 315-2PN/DP。
以下为采用普通网卡CP443-1的通讯连接。
1. STEP7硬件组态使用STEP7编程软件对PLC系统进行硬件组态,在“硬件”配置窗口插入实际的PLC硬件,如图1所示:图1 STEP7硬件组态2. 双击CP443-1槽的CP443-1,弹出属性对话框,如图2所示:图2 CP443-1属性对话框3. 点击图2属性对话框,弹出网络参数设置对话框,点击“新建”按钮,新建一个以太网络,输入以太网模块CP443-1的IP地址,通常情况下,不需要启用网关。
如图3所示:图3 参数设置注意事项:如果采用TCP/IP协议通讯方式,必须启动“正在使用IP协议”,将组态好的硬件下载到CPU,则PLC设置完成了!4. 设置安装WINN6.0(通常为工程师站ES和操作员站OS)计算机Windows操作系统的TCP/IP参数,将WINN组态计算机的IP地址设置成为与PLC以太网通讯模块或者PN接口地址保持在一个网段内。
如图4所示:图4 设置计算机IP地址5. 添加新的驱动程序和设置系统参数,打开新创建的工程“test”,在项目管理栏里选择“变量管理”,单击右键选择“添加新的驱动程序”,如图5所示。
6. 在添加新的驱动程序文件夹里选择“SIMATIC S7 Protocol Suite.chn”,如6所示:图6 驱动程序7. 右键单击TCP/IP,在弹出菜单中点击“系统参数”,如图7所示。
弹出“系统参数-TCP/IP对话框”,选择“单元”标签,查看“逻辑设备名称”,一般默认安装后,逻辑设备名为CP-TCP/IP。
西门子PLC指令教程 第8章 通信及网络1
第8章 通信及网络
2. 网络层次结构
西门子公司的生产金字塔由4级组成,由 下到上依次是:过程测量与控制级、过程 监控级、工厂与过程管理级、公司管理级。 S7系列的网络结构如右图8.8所示。
第8章 通信及网络
生产管理 计算机
工业以太网Ethernet
S7-300
S7-300
现场总线 Profibus
3. 参数设置
在图7.14所示的对话 框,单击Properties按 钮,将弹出参数设置 对话框,如图8.16所 示。其中有两个选项 卡 : PPI 选 项 卡 和 Local Connection选项 卡。
图8.16 参数设置(PPI选项卡)
返回本节
第8章 通信及网络
8.3 网络通信
8.3.1 控制寄存器和传送数据表 8.3.2 网络指令 8.3.3 应用实例
第8章 通信及网络
1 6
9 5
图8.11 RS-485引脚
第8章 通信及网络
(2)网络连接器 网络连接器可以用来把多个设备很容易地连接到 网络中。网络连接器有两种类型:一种是仅提供 连接到主机的接口,另一种增加了一个编程接口。 带有编程口的连接器可以把编程器或操作员面板 直接增加到网络中,编程口传递主机信号的同时, 为这些设备提供电源,而不用另加电源。
第8章 通信及网络
A
B
(a)
A
B
(b)
A
B
(c)
图8.3 单工、半双工和双工
第8章 通信及网络
起始位
数据位
奇偶校验位 停止位 空闲位
0/1 0/1 0/1 0/1 0/1 0/1 0/1 0/1 1 1 1
低位
字符n
高位
西门子PLC几种常见的连接口和通讯协议

西门子PLC几种常见的连接口和通讯协议第一个大问题:RS232接口与RS485接口的区别一、接口的物理结构1、RS232接口:计算机通讯接口之一,通常 RS-232 接口以9个引脚 (DB-9) 或是25个引脚 (DB-25) 的型态出现,一般个人计算机上会有两组 RS-232 接口,分别称为 COM1 和 COM2。
2、RS485RS485无具体的物理形状,根据工程的实际情况而采用的接口。
二、接口的电子特性1、RS232:传输电平信号接口的信号电平值较高(信号“1”为“-3V至-15V”,信号“0”为“3至15V”),易损坏接口电路的芯片,又因为与TTL电平(0~“<0.8v”,1~“>2.0V”)不兼容故需使用电平转换电路方能与TTL电路连接。
另外抗干扰能力差。
2、RS485:传输差分信号逻辑“1”以两线间的电压差为+(2—6)V表示;逻辑“0”以两线间的电压差为-(2—6)V表示。
接口信号电平比RS-232降低了,就不易损坏接口电路的芯片,且该电平与TTL电平兼容,可方便与TTL电路连接。
三、通讯距离长短1、RS232:RS232传输距离有限,最大传输距离标准值为15米,且只能点对点通讯,最大传输速率最大为20kB/s。
2、RS485:RS485最大无线传输距离为1200米。
最大传输速率为10Mbps,在100Kb/S的传输速率下,才可以达到最大的通信距离。
采用阻抗匹配、低衰减的专用电缆可以达到1800米!超过1200米,可加中继器(最多8只),这样传输距离接近10Km。
四、能否支持多点通讯RS232:RS232接口在总线上只允许连接1个收发器,不能支持多站收发能力,所以只能点对点通信,不支持多点通讯。
RS485:RS485接口在总线上是允许连接多达128个收发器。
即具有多站通讯能力,这样用户可以利用单一的RS485接口方便地建立起设备网络。
五、通讯线的差别RS232:可以采用三芯双绞线、三芯屏蔽线等。
实用西门子PLC(Modbus RTU)通讯
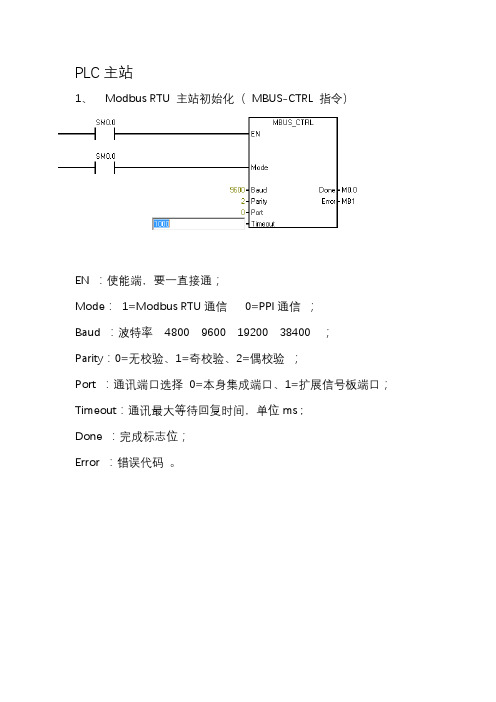
PLC主站1、Modbus RTU 主站初始化(MBUS-CTRL 指令)ENEN :使能端,要一直接通;Mode:1=Modbus RTU通信0=PPI通信;Baud :波特率4800 9600 19200 38400 ;Parity:0=无校验、1=奇校验、2=偶校验;Port :通讯端口选择0=本身集成端口、1=扩展信号板端口;Timeout:通讯最大等待回复时间,单位ms ;Done :完成标志位;Error :错误代码。
2、读写指令MBUS-MSGEN:使能端,一直接通;First:读写触发,需配合沿指令使用;Slave:从站地址;RW:0=读、1=写;Addr :读写从站的Modbus首地址;Count:读写数量;DataPtr:数据指针(用于存储将要读取或写入的数据);其他同上。
PLC从站1、Modbus RTU 从站初始化(MBUS-INIT)EN:使能端,使用SM0.1激活;Mode:1=Modbus、0=PPI ;Addr:从站站地址;Baud:波特率;Parity:奇偶校验0=无、1=奇校验、2=偶校验;Port:通讯端口选择0=集成端口、1=扩展端口;Delay:一般填0;MaxIQ:允许主站读写的最大IO点数;MaxAI:允许主站读取的最大AI字数;MaxHold:允许主站读取的最大V区字数;HoldStart:允许主站读取的V区首地址(Modbus地址为40001);其他同上。
2、处理主站通讯请求指令(MBUS-SLAVE)变频器从站1、西门子变频器2、三菱变频器硬件接线。
西门子PLC网络通讯详解
使用SFC60和SFC61实现全局数据的发送与接收,必须进
行全局数据包的组态,参照【例7-2-1】。现假设已经在全局
数据表中完成了GD组态,以MPI_Station_1为例,设预发送
数据包为GD 2.1,预接收数据包为GD 2.2。要求当M1.0为
“
1
”
时
发送全局数据GD 2.1;当M1.2为“1”时接收全局数据GD
向
通
讯。
【例7-2-3】 无组态双向通讯。
设2个MPI站分别为MPI_Station_1(MPI地址为设为2)
和MPI_Station_2(MPI地址设为4),要求
MPI_Station_1站发送一个数据包到MPI_Station_2站。
返回上级
生成MPI硬件ቤተ መጻሕፍቲ ባይዱ作站
打开STEP 7,创建一个S7项目,并命名为“双向通讯”。 在此项目下插入两个S7-300的PLC站,分别重命名为 MPI_Station_1和MPI_Station_2。MPI_Station_1包含一
第7章 西门子PLC通信技术
本章结合具体实例,详细介绍MPI网络的组建方法、如何
用全局数据包通信方式实现PLC之间的MPI网络通信、如何实
现无组态连接的PLC之间的MPI通信、如何实现有组态连接的
PLC之间的MPI通信、如何实现PLC之间的PROFIBUS-DP主
从通信、如何组态远程I/O站,最后介绍了CP342-5分别作为
返回上级
编写发送站的通讯程序 在MPI_Station_1站的循环中断组织块OB35中调用
SFC65,将I0.0~I1.7发送到MPI_Station_2站。 MPI_Station_1站OB35中的通讯程序如图所示。
简述西门子PLC常用通讯协议及其特点

简述西门子PLC常用通讯协议及其特点1、引言随着烟厂生产工艺信息化的逐渐健全,不同生产工艺控制单元之间的信息交换变得越来越必不可少。
信息交换使各个控制单元与其控制细胞之间以及不同控制单元之间建立信息联系,克服控制单元的“孤岛”效应,增加了控制系统的安全可靠性、经济性,同时也加速了自动化的发展。
本文重点介绍了在烟厂中应用的西门子的几种控制网络通信协议以及各自具有的特点,最后进行总结。
2、在烟厂中应用的西门子工业控制网络通信协议简介在烟厂中应用的西门子工业控制网络通信协议包括以下几种:2.1PPI网络通信协议PPI网络通信协议用于S7—200PLC、上位机与TD200之间的串行通信协议,也是S7—200系列基本的通信方式,不需要格外的扩展模块,可以通过PPI口来实现。
PPI网络通信协议使用双绞电缆联网,通信接口即为S7—200系列上CPU集成编程接口。
在烟厂中应用的PPI网络通信协议信号传递简单易行,不使用额外的软硬件,经济实惠。
2.2PtP网络通信协议PtP网络通信协议与S7—300/400系统为点对点通信。
点对点通信即为两点之间的信息交流,仅支持两台硬件设备进行通信。
在烟厂中应用的$7300/400与另外的串行通信设备之间的数据交换可用S7—300/400的网络通信模块来实现。
PtP网络通信协议既可用于西门子产品也兼容第三方产品,前提是必须满足通信模块与相应的通信方使用双方支持的一种通信方式。
在烟厂中应用的PtP通信与PPI通信的区别在于S7—300,S7—400的PtP网络通信接口不支持PPI网络通信协议,PtP通信接口一般使用SFB60(SEND)/SFB6 1(RCV)具体编程来实现RS485/422通信(串行通信)。
2.3MPI网络通信协议在烟厂中应用的MPI网络通信协议即多点串行通信协议,也是多点通信接口的简称,其通信速率为19.2 Kbit/s-12 Mbit/s,适用于烟厂中相距距离小、站点数目不多的站点之间的通信。
工业机器人与可编程控制器(西门子PLC)的通讯
工业机器人与可编程控制器(西门子PLC)的通讯工业机器人与可编程控制器(PLC)的通信是现代工业自动化中非常重要的一个环节。
机器人一般用于完成重复性强、工作量大、对工件精度要求高、不适合人工操作的作业任务,而PLC作为工业控制系统的核心,负责对工业设备进行控制和监控。
在工业机器人与PLC的通信中,主要有以下几种通信方式:1. 以太网通信:以太网是一种常见的工业通信方式,可支持高速数据传输。
在机器人和PLC之间建立以太网通信连接后,可以通过以太网协议进行数据的传输和交换,实现两者之间的实时通信。
2. 串行通信:串行通信是一种较为简单和常见的通信方式,适合于数据量较小的通信。
通过串行通信,机器人和PLC可以进行数据的传输和交换,包括控制指令、状态信息等。
3. 字段总线通信:字段总线通信是一种更加高级且灵活的通信方式,适合于复杂的工业自动化系统。
通过字段总线通信,机器人和PLC可以进行实时数据交换和共享,提高工业生产的效率和自动化水平。
1. 控制指令传输:PLC作为控制器,负责对机器人进行控制。
通过与PLC进行通信,机器人可以接收到PLC发送的控制指令,实现对其运动、操作等方面的控制。
2. 状态信息传输:机器人在工作过程中会生成各种状态信息,如位置、速度、力等。
通过与PLC进行通信,机器人可以将这些状态信息实时传输给PLC,以便PLC进行监控和控制。
3. 故障诊断和报警:机器人在工作过程中可能会出现各种故障和异常情况,如机械故障、电气故障等。
通过与PLC进行通信,机器人可以将故障信息传输给PLC,PLC则可以进行故障诊断和报警,提高故障处理的效率和准确性。
4. 数据共享和交互:在某些工业生产过程中,机器人和PLC需要共同完成一些复杂的任务。
通过通信,机器人和PLC可以实现数据的共享和交互,使二者之间更好地协同工作。
工业机器人与PLC的通信是实现工业自动化的重要环节,它能够提高生产效率、减少人工操作、提高生产质量,进一步推动工业生产的现代化进程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
以太网通讯
SIMATIC NET工业以太网基本类型和网络硬件
SIMATIC NET工业以太网有2种类型,分别为10Mbit/s工业 以太网和100Mbit/s工业以太网。它是利用带传输技术,基于 IEEE802.3利用CSMA/CD介质访问方法的单元级和控制级传输 网络。在西门子工业以太网中,通常使用的的物理传输介质是屏 蔽双绞线(TP),工业屏蔽双绞线(ITP)以及光纤。
以太网通讯
❖SIMATIC NET工业以太网网络部件
SIMATIC NET工业以太网网络部件包括工业以太网链路模 板OLM,ELM和工业以太网交换机OSM/ESM和ELS以及 工业以太网链路模块OMC。
❖SIMATIC NET工业以太网的拓扑结构
SIMATIC NET工业以太网的拓扑结构包括 (1)总线型拓扑结构; (2)环型拓扑结构; (3)环网冗余。
终端电阻
有源终端电阻
PROFIBUS通讯
4、PROFIBUS接口连接远程站ET200M
ET200系列是远程I/O站,为减少信号电缆的敷设,可 以在设备附近根据不同的要求放置不同类型的I/O站, 如ET200M、ET200S、ET200B等,ET200M适合在远 程站点I/O点数量较多的情况下使用。
1 0 1 00 11 0 1S
4
通讯的基本概念
波特率
波特(baud)是指信号大小方向变化的一个波形。 把每秒传输信号的个数,即每秒传输信号波形的变化次数定义为波特率。其 单位为波特(Baud)。 每个信号波形可以包含一个或多个二进制位。若单比特信号的传输速率为 9600bit/s,则其波特率为9600baud,意味着每秒可以传输9600个二进制脉冲。 如果信号波形由2个二进制位组成,当传输速率为9600bit/s,波特率只有 4800baud 波特率与比特率的关系为:比特率=波特率×单个信号对应的二进制位数。
二、无组态连接通讯
1、双边编程
2、单边编程
MPI通讯
PLC-PLC之间的MPI通讯
三、有组态连接通讯
在MPI网络中,对于这种通讯方式只适合于S7-300/400以及S7-400/400 之间的通讯。S7-300只能做服务器,S7-400作为客户机对S7-300的数 据进行读写。最大支持160字节
MPI通讯
二、CP5511/CP5512
用于笔记本电脑和PLC的通讯,有网络诊断功能,通讯速率最高为 12M/s
三、CP5611/CP5613
用于台式电脑和PLC的通讯,有网络诊断功能,通讯速率最高为 12M/s
MPI通讯
PLC-PLC之间的MPI通讯
一、全局数据包通讯 二、无组态连接通讯 三、有组态连接通讯
采用3台S7315-DP加CP343,通过建立S7连接来说明 多台300PLC的工业以太网的组网技术。
以太网通讯
网络组建
第一步:SIMATIC 300(1)站的硬件组态
首先创建一个新的项目,项目名 称为“COM_ET_3300” 在项目内依次插入3个300站点: “SIMATIC 300(1)”、 “SIMATIC 300(2)”、 “SIMATIC 300(3)” 对3个站点进行组态。 第一个站:IP地址 “192.168.10.60” 子网掩码“255.255.255.0”。
以太网通讯
20
PROFIBUS通讯
1、PROFIBUS介绍
PROFIBUS符合国际标准IEC61158,是目前国际上通用的 现场总线标准之一,包括三个主要部分
1)PROFIBUS-DP 2)PROFIBUS-PA 3)PROFIBUS-FMS
PROFIBUS 总线传输是以半双工、异步为基础的,传输介质可以是光 缆或屏蔽双绞线,每一个传输段为32个站点,在总线两端为终端电阻
DP/DP Coupler用于 连接两个Profibus-DP 主站网络,以便在这两 个主站网络之间进行数 据通讯。 数据通讯区最高可以达 244字节输入和244字 节的输出.
PROFIBUS通讯
6、DP/DP Coupler(耦合器)
DP/DP Coupler连接的两个网段,通讯速率可以不同,因此DP/DP Coupler非常适用于不同通讯速率的两个Profibus-DP主站系统之间的 数据通讯,但是对于通讯数据区,网络1的输入区必须和网络2的输出区 完全对应,同样网络2的输入区必须和网络1的输出区完全对应,否则会 造成通讯故障,下图显示了两个网络之间的数据通讯区的对应关系:
MPI通讯
设置MPI参数
一、PLC侧参数设置
在通常的应用中不 要改变MPI的通讯
速率。注意:在整 个MPI网络中通讯
速率必须保持一致, 且MPI站地址不能 冲突。
MPI通讯
PC侧的MPI通讯卡类型
一、PC Adapter(PC适配器)
一端连接PC,另一端连接CPU的MPI,没有网络诊断功能,通讯速 率最高为1.5M/s
以太网通讯
SIMATIC NET工业以太网通信处理器
常用的SIMATIC NET工业以太网通信处理器(CP),包括用 在S7 PLC站上的处理器CP243-1系列、CP343-1系列、 CP443-1系列以及用在PC上的网卡,并提供ITP、RJ45及AUI 等以太网接口。
以太网通讯
多台S7-300PLC之间的IE通信
以太网技术的发展,特别是高速以太网的出现, 由于其提高了抗干扰能力,因而进入工业领域成 为工业以太网,目前为发展的快速阶段。
以太网通讯
1、以太网的通信机制
以太网遵循IEEE802.3标准,可以在光缆和双绞线上传输。 它最早出现在1972年,由Xerox、PARC所创建。当前以太网 采用星型和总线型结构,传输速率为10Mb/s,100 Mb/s, 1000 Mb/s或更高。
PLC-PLC之间的MPI通讯
三、有组态连接通讯
编程:在S7-400占中调用系统功能块SFB14/SFB15,完成和S7-300的通讯。 调用系统功能块SFB于系统功能SFC的通讯相比,每一包的数据量要大一些
MPI通讯
PLC与HMI产品之间的MPI通讯
S7-300/400与HMI通讯不需要STEP7软件组态,也不需要编写任何程序,只需在 HMI组态软件上设置一下相关的通讯参数即可。
以太网通讯
第四步:建立S7 连接
以太网通讯
第四步:建立S7 连接
Prifibus通讯
7、通过Profibus-DP连接智能从站
PROFIBUS通讯
7、通过PROFIBUS-DP连接智能从站
通讯速率一致!
组态通讯地址
PROFIBUS通讯
8、通过Profibus-DP连接第三方设备
PROFIBUS-DP是一种通讯标准,符合其规约的第三方设备也 可以加入PROFIBUS网络,支持PROFIBUS-DP的从站设备都会 有GSD文件,GSD文件是对设备一般性的描述,将此GSD文件 导入Step7软件就可以组态从站的通讯接口。
以太网通讯
第二步:SIMATIC 300(2)站的硬件组态
第2站:IP地址改为“192.168.10.61”,子网掩码 依然是“255.255.255.0”;编译保存。
第三步:SIMATIC 300(3)站的硬件组态
第3站:IP地址改为“192.168.10.62”,子网掩码 依然是“255.255.255.0”;
目录
二
主要的通讯方式
MPI通讯
PPRrOifFibIBuUs通S通讯讯
以以太太网网通通讯讯
32
以太网通讯
现场总线的出现,对于实现面向设备的自动化系 统起到了巨大的推动作用,但现场总线具有成本 高、速度低和支持应用有限等缺陷,加上总线通 信协议的多样性,使得不同总线产品互连复杂, 因而其发展受到了极大的限制。
传输速率(kbit/s)
总线长度/m
9.6-187.5 500 1500 3000-12000
1000 400 200 100
PROFIBUS通讯
2、RS485 中继器
如果需要扩展总线的长度或者PROFIBUS从站数大于32 个时,就要加入RS485 中继器
PROFIBUS通讯
3、总线终端
每一个PROFIBUS总线连接器都带有终端电阻,终端电阻放置在 PROFIBUS总线的两端,通过站点向终端电阻供电使之生效。在一 条PROFIBUS总线上,位于总线中间的站点掉电,不会影响整个网 络通讯功能,如果是总线两端的站点掉电将会失去终端电阻的功能, 使整个网络通讯中断。因此在一些需要经常断电的终端子站,需要 增加一个有源终端电阻。
西门子PLC常用 通讯方式
主要内容
一
通讯的基本概念
二
通讯的组成部分
主要的通讯方式
比特率
波特率
2
通讯的基本概念
通讯的组成部分
发送设备
信道编码和信源编码
噪声干扰
接受设备
信
息 源
编 码
调 制
传输介质
解 调
译 码
接
受 者
模拟信号源和离散信号源 有线和无线
信道解码和信源解码
3
通讯的基本概念
比特率
比特(bit)是数据信号中最小的单位。通讯系统中的字符或者字节一般由 多个二进制位即多个比特来表示。 在数字信道中,比特率是数字信号的传输速率,它用单位时间内传输的二 进制代码的有效位(bit)数来表示,其单位为每秒比特数bit/s(bps)、每秒 千比特数(Kbps)或每秒兆比特数(Mbps)来表示。 此处K和M分别为1000(103)和1000000(106),而不是涉及计算机存储器容量 时的1024(210)和1048576(220)。
显然,在无调制的情况下, 波特率精确等于比特率;四相调制(单个调制状态 对应2个二进制位)的比特率为波特率的两倍;八相调制(单个调制状态对应3个 二进制位)的比特率为波特率的三倍;依次类推。