最小二乘定位解算matlab代码
matlab最小二乘解方程
matlab最小二乘解方程最小二乘法是求解线性方程组的一种有效方法,可以通过最小化误差平方和来得到最优解。
在MATLAB中,我们可以使用“\”操作符或者使用“pinv”函数来求解一个线性方程组的最小二乘解。
以下是关于如何在MATLAB中使用最小二乘法来求解线性方程组的详细内容:1. 使用“\”操作符使用“\”操作符可以很方便地求解一个线性方程组的最小二乘解。
例如,假设我们有一个由n个方程组成的线性方程组:Ax = b其中,A是一个m ×n的矩阵,x是一个n维向量,b是一个m维向量。
则它的最小二乘解为:x = (A' A)^(-1) A' b在MATLAB中,我们可以通过以下代码实现最小二乘解:A = [1 1 1; 2 3 4; 4 5 7; 5 6 8];b = [1; 2; 3; 4];x = A \ b;其中,反斜杠符号“\”表示求解线性方程组的最小二乘解。
2. 使用“pinv”函数除了使用“\”操作符,我们也可以使用MATLAB中的“pinv”函数来求解一个线性方程组的最小二乘解。
例如,我们可以通过以下代码实现最小二乘解:A = [1 1 1; 2 3 4; 4 5 7; 5 6 8];b = [1; 2; 3; 4];x = pinv(A) * b;其中,pinv函数表示求矩阵A的伪逆矩阵。
使用“pinv”函数来求解线性方程组的最小二乘解与使用“\”操作符的结果是等价的。
需要注意的是,在使用最小二乘法来求解线性方程组时,矩阵A的列应该是线性无关的,否则可能会出现唯一最小二乘解不存在的情况。
综上所述,MATLAB中使用最小二乘法来求解线性方程组非常简单。
我们可以通过“\”操作符或者“pinv”函数来求解一个线性方程组的最小二乘解。
最小二乘算法matlab代码实现

最小二乘算法matlab代码实现最小二乘算法是一种常用的线性回归方法,它可以用来拟合数据,预测未来趋势。
在matlab中,我们可以使用内置函数来实现最小二乘算法。
首先,我们需要准备一些数据。
假设我们有一组数据,包含x和y两个变量,我们希望通过这组数据来拟合一条直线。
```matlabx = [1, 2, 3, 4, 5];y = [2.1, 3.9, 6.2, 8.1, 10.1];```接下来,我们可以使用polyfit函数来拟合一条一次函数,该函数返回的是拟合直线的系数。
```matlabp = polyfit(x, y, 1);```其中,第一个参数是自变量,第二个参数是因变量,第三个参数是拟合的次数。
在本例中,我们拟合的是一次函数,所以拟合的次数为1。
接着,我们可以使用polyval函数来计算拟合直线的值。
```matlabyfit = polyval(p, x);```最后,我们可以绘制原始数据和拟合直线的图像。
```matlabplot(x, y, 'o', x, yfit, '-')legend('原始数据', '拟合直线')```完整的matlab代码如下:```matlabx = [1, 2, 3, 4, 5];y = [2.1, 3.9, 6.2, 8.1, 10.1];p = polyfit(x, y, 1);yfit = polyval(p, x);plot(x, y, 'o', x, yfit, '-')legend('原始数据', '拟合直线')```通过以上代码,我们可以实现最小二乘算法的拟合过程,并得到拟合直线的系数和图像。
加权递归最小二乘 matlab代码
加权递归最小二乘 matlab代码以下是使用Matlab编写的加权递归最小二乘法的示例代码:matlab复制代码function [theta, P] = wrrs(X, Y, theta, P, la mbda) % WRRSLS 加权递归最小二乘法 % X, Y 是观测数据矩阵,theta 是初始参数向量,P 是初始协方差矩阵,lambda 是正则化参数 % 返回 theta 和 P % 计算权值% WRRSLS 加权递归最小二乘法 % X, Y 是观测数据矩阵,theta 是初始参数向量,P 是初始协方差矩阵,l ambda 是正则化参数 % 返回 theta 和 P % 计算权值 N = length(X); Xb = (X'*P*X + lambda*eye(size(X,1))).^(-1)*X'; W = (P*X'*X*P + lambda*eye(size(P,1))).^(-1); % 计算参数向量和协方差矩阵 theta = Xb*Y; P = (eye(size(P)) - Xb*X)*P; % 计算误差向量和残差矩阵 e = Y - X*theta; R = (X*P*X') + lambda*eye(size(X)); % 计算加权残差向量和加权残差矩阵 eW = W*e; RW = R*W; % 计算加权递归最小二乘法的参数向量和协方差矩阵 theta = theta + eW'; P = RW*P*RW'; end该函数接受观测数据矩阵X、观测数据向量Y、初始参数向量theta、初始协方差矩阵P 和正则化参数lambda 作为输入,并返回最终的参数向量thet a 和协方差矩阵P。
在函数内部,首先计算权值W,然后使用加权最小二乘法计算参数向量theta 和协方差矩阵P,最后计算误差向量和残差矩阵,以及加权残差向量和加权残差矩阵,并使用它们更新参数向量和协方差矩阵。
Matlab偏最小二乘代码
for p=1:k drop=((p-1)*leaveout+1):(p*leaveout) test=ppz(drop,:) pz=ppz pz(drop,:)=[] mu=mean(pz);sig=std(pz); %求均值和标准差 rr=corrcoef(pz); %求相关系数矩阵 data=zscore(pz); %数据标准化 n=19;m=1; %n 是自变量的个数,m 是因变量的个数 x0=pz(:,1:n);y0=pz(:,n+1:end); e0=data(:,1:n);f0=data(:,n+1:end); num=size(e0,1);%求样本点的个数 chg=eye(n); %w 到 w*变换矩阵的初始化 for i=1:n %以下计算 w,w*和 t 的得分向量, matrix=e0'*f0*f0'*e0; [vec,val]=eig(matrix); %求特征值和特征向量 val=diag(val); %提出对角线元素 [val,ind]=sort(val,'descend'); w(:,i)=vec(:,ind(1)); %提出最大特征值对应的特征向量 w_star(:,i)=chg*w(:,i); %计算 w*的取值 t(:,i)=e0*w(:,i); %计算成分 ti 的得分 alpha=e0'*t(:,i)/(t(:,i)'*t(:,i)); %计算 alpha_i chg=chg*(eye(n)-w(:,i)*alpha'); %计算 w 到 w*的变换矩阵 e=e0-t(:,i)*alpha'; %计算残差矩阵 e0=e; %以下计算 ss(i)的值 beta=[t(:,1:i),ones(num,1)]\f0; %求回归方程的系数 beta(end,:)=[]; %删除回归分析的常数项 cancha=f0-t(:,1:i)*beta; %求残差矩阵 ss(i)=sum(sum(cancha.^2)); %求误差平方和 %以下计算 press(i) for j=1:num t1=t(:,1:i);f1=f0; she_t=t1(j,:);she_f=f1(j,:); %把舍去的第 j 个样本点保存起来 t1(j,:)=[];f1(j,:)=[]; %删除第 j 个观测值 beta1=[t1,ones(num-1,1)]\f1; %求回归分析的系数 beta1(end,:)=[]; %删除回归分析的常数项 cancha=she_f-she_t*beta1; %求残差向量 press_i(j)=sum(cancha.^2); end press(i)=sum(press_i); if i>1
最小二乘法MATLAB程序及结果

最小二乘递推算法的MATLAB仿真针对辨识模型,有z(k)-+a1*z(k-1)+a2*z(k-2)=b1*u(k-1)+b2*u(k-2)+v(k)模型结构,对其进行最小二乘递推算法的MATLAB仿真,对比真值与估计值。
更改a1、a2、b1、b2参数,观察结果。
仿真对象:z(k)-1.5*z(k-1)+0.7*z(k-2)=u(k-1)+0.5*u(k-2)+v(k)程序如下:L=15;y1=1;y2=1;y3=1;y4=0; %四个移位寄存器的初始值for i=1:L; %移位循环x1=xor(y3,y4);x2=y1;x3=y2;x4=y3;y(i)=y4; %取出作为输出信号,即M序列if y(i)>0.5,u(i)=-0.03; %输入信号else u(i)=0.03;endy1=x1;y2=x2;y3=x3;y4=x4;endfigure(1);stem(u),grid onz(2)=0;z(1)=0;for k=3:15;z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2); %输出采样信号endc0=[0.001 0.001 0.001 0.001]'; %直接给出被识别参数的初始值p0=10^6*eye(4,4); %直接给出初始状态P0E=0.000000005;c=[c0,zeros(4,14)];e=zeros(4,15);for k=3:15; %开始求kh1=[-z(k-1),-z(k-2),u(k-1),u(k-2)]';x=h1'*p0*h1+1;x1=inv(x);k1=p0*h1*x1; %开始求k的值d1=z(k)-h1'*c0;c1=c0+k1*d1;e1=c1-c0;e2=e1./c0; %求参数的相对变化e(:,k)=e2;c0=c1;c(:,k)=c1;p1=p0-k1*k1'*[h1'*p0*h1+1]; %求出P(k)的值p0=p1;if e2<=E break;endendc,e %显示被辨识参数及其误差情况a1=c(1,:);a2=c(2,:);b1=c(3,:);b2=c(4,:);ea1=e(1,:);ea2=e(2,:);eb1=e(3,:);eb2=e(4,:);figure(2);i=1:15;plot(i,a1,'r',i,a2,':',i,b1,'g',i,b2,':')title('Parameter Identification with Recursive Least Squares Method')figure(3);i=1:15;plot(i,ea1,'r',i,ea2,'g',i,eb1,'b',i,eb2,'r:')title('Identification Precision')程序运行结果:p0 =1000000 0 0 00 1000000 0 00 0 1000000 00 0 0 1000000c =Columns 1 through 90.0010 0 0.0010 -0.4984 -1.2325 -1.4951 -1.4962 -1.4991 -1.49980.0001 0 0.0001 0.0001 -0.2358 0.6912 0.6941 0.6990 0.69980.0010 0 0.2509 1.2497 1.0665 1.0017 1.0020 1.0002 0.99990.0010 0 -0.2489 0.7500 0.5668 0.5020 0.5016 0.5008 0.5002Columns 10 through 15-1.4999 -1.5000 -1.5000 -1.5000 -1.4999 -1.49990.6999 0.7000 0.7000 0.7000 0.7000 0.70000.9998 0.9999 0.9999 0.9999 0.9999 0.99990.5002 0.5000 0.5000 0.5000 0.5000 0.5000e =1.0e+003 *Columns 1 through 90 0 0 -0.4994 0.0015 0.0002 0.0000 0.0000 0.00000 0 0 0 -2.3592 -0.0039 0.0000 0.0000 0.00000 0 0.2499 0.0040 -0.0001 -0.0001 0.0000 -0.0000 -0.00000 0 -0.2499 -0.0040 -0.0002 -0.0001 -0.0000 -0.0000 -0.0000Columns 10 through 150.0000 0.0000 0.0000 -0.0000 -0.0000 0.00000.0000 0.0000 -0.0000 0.0000 0.0000 0.0000-0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000-0.0000 -0.0000 0.0000 -0.0000 0.0000 -0.0000程序运行曲线:图1.输入信号图2.a1,a2,b1,b2辨识仿真结果图3. a1,a2,b1,b2各次辨识结果收敛情况分析:由运行结果可看出,输出观测值没有任何噪声成分时,辨识结果最大相对误差达到3位数。
matlab最小二乘法拟合求参数

matlab最小二乘法拟合求参数
在Matlab中,可以使用`polyfit`函数来进行最小二乘法拟合,并求得拟合参数。
`polyfit`函数的使用格式如下:
```
p = polyfit(x, y, n)
```
其中,`x`和`y`是数据点的横坐标和纵坐标,`n`是拟合多项式的阶数。
函数返回一个包含拟合参数的向量`p`,其中`p(1)`为常数项,`p(2)`为一次项,以此类推。
下面是一个示例代码,展示了如何使用`polyfit`函数进行最小二乘法拟合并求参数:
```matlab
% 生成示例数据
x = [1, 2, 3, 4, 5];
y = [3, 5, 7, 9, 11];
% 进行最小二乘法拟合
p = polyfit(x, y, 1);
% 输出拟合参数
disp(p);
```
在上述示例中,拟合的是一阶多项式,即直线。
运行代码后,将输出拟合参数的值。
如果需要拟合更高阶的多项式,只需将`n`参数设置为相应的阶数即可。
最小二乘法原理及其MATLAB实现

最小二乘法原理及其MATLAB实现一、本文概述最小二乘法是一种广泛应用于数学、统计学、工程学、物理学等众多领域的数学优化技术。
其核心原理在于通过最小化误差的平方和来寻找最佳函数匹配,从而实现对数据的最佳逼近。
本文将对最小二乘法的原理进行详细阐述,并通过MATLAB编程实现,帮助读者深入理解并掌握这一强大的数据分析工具。
文章将首先介绍最小二乘法的基本原理,包括其历史背景、基本概念以及数学模型的构建。
然后,通过实例分析,展示如何应用最小二乘法进行线性回归模型的拟合,以及如何处理过拟合和欠拟合等问题。
接着,文章将详细介绍如何在MATLAB中实现最小二乘法,包括数据准备、模型构建、参数估计以及结果可视化等步骤。
文章还将对最小二乘法的优缺点进行讨论,并探讨其在不同领域的应用前景。
通过本文的学习,读者将能够全面理解最小二乘法的原理和应用,掌握其在MATLAB中的实现方法,为实际工作中的数据处理和分析提供有力支持。
二、最小二乘法原理最小二乘法(Least Squares Method)是一种数学优化技术,它通过最小化误差的平方和寻找数据的最佳函数匹配。
这种方法起源于19世纪的统计学,由数学家阿德里安-马里·勒让德(Adrien-Marie Legendre)和卡尔·弗里德里希·高斯(Carl Friedrich Gauss)分别独立发展。
建立模型:我们需要建立一个描述数据关系的数学模型。
这通常是一个线性方程,如 y = ax + b,其中 a和b是待求解的参数。
误差计算:对于给定的数据集,我们可以将每个数据点代入模型中进行计算,得到预测值。
预测值与真实值之间的差异就是误差。
平方误差和:为了衡量模型的拟合程度,我们需要计算所有误差的平方和。
这是因为平方误差和能够更好地反映误差的大小,尤其是在误差较大时。
最小化平方误差和:最小二乘法的核心思想是找到一组参数,使得平方误差和达到最小。
这通常通过求导和令导数等于零来实现,从而找到使平方误差和最小的参数值。
matlab最小二乘法拟合曲线代码

在Matlab中使用最小二乘法进行曲线拟合是一项非常常见的任务。
最小二乘法是一种数学优化技术,用于对一组数据进行曲线拟合,以便找到最能代表数据趋势的曲线。
在本文中,我将深入探讨Matlab中最小二乘法拟合曲线的代码实现,并共享我对这一主题的个人理解。
让我们来了解一下什么是最小二乘法。
最小二乘法是一种数学优化技术,用于寻找一组数据的最佳拟合曲线。
在Matlab中,可以使用内置的polyfit函数来实现最小二乘法曲线拟合。
这个函数的基本语法是:```matlabp = polyfit(x, y, n)```其中,x和y分别是数据点的横纵坐标,n是要拟合的多项式次数。
这个函数将返回多项式系数向量p,使得拟合多项式最小化了实际数据点与拟合曲线之间的误差平方和。
举个例子,假设我们有一组数据点(x, y),我们可以使用polyfit函数来进行二次多项式拟合:```matlabx = [1, 2, 3, 4, 5];y = [2, 3, 4, 3, 5];p = polyfit(x, y, 2);```在这个例子中,p将会是一个包含三个元素的向量,分别代表二次多项式的系数a、b和c。
通过这些系数,我们就可以得到拟合的二次多项式方程。
除了使用polyfit函数,我们还可以使用polyval函数来计算拟合曲线上的点。
其基本语法形式是:```matlaby_fit = polyval(p, x)```在这个例子中,p是通过polyfit得到的多项式系数向量,x是我们要计算拟合曲线上的点的横坐标,y_fit将是这些点的纵坐标。
另外,Matlab还提供了许多其他的拟合函数和工具箱,用于不同类型的数据和曲线拟合需求。
通过调用这些函数和工具箱,我们可以实现更复杂的曲线拟合任务,满足不同数据类型和拟合目标的需求。
总结来说,Matlab提供了丰富的工具和函数,用于实现最小二乘法曲线拟合。
通过调用polyfit函数和其他拟合工具箱,我们可以轻松地对一组数据进行曲线拟合,从而得到最能代表数据趋势的曲线。
matlab练习程序(三种方法解最小二乘)

模型如下:
%原始模型
X=x(:); Y=y(:); Z=z(:); X=X(1:100:end); Y=Y(1:100:end); Z=Z(1:100:end); plot3(X,Y,Z,'ro')
XX=[X.^2 Y.^2 X.*Y X Y ones(length(X),1)]; YY=Z;
%一般方法 C1=inv(XX'*XX)*XX'*YY;
%svd分解法 Y=zeros(6,1); [U,S,V]=svd(XX); B=U'*YY; for i=1:6
Y(i)=B(i)/S(i,i); end C2=V*Y;
%qr分解法 [Q,R] = qr(XX); C3 = pinv(R)*(Q'*YY);
C1' C2' C3'
三种方法结果是一致的:
三是qr分解法,这个好像没用过。
这里主要总结记录一下实现方法。
代码如下:
clear all; close all; clc;
a=2;b=2;c=-3;d=1;e=2;f=30; %系数 [x,y]=meshgrid(0:0.1:30); z=a*x.^2+b*y.^2+c*x.*y+d*x+e*y +f; mesh(x,y,z) hold on;
二是svd分解法之前有用过svd见这里这里这里和这里解其他问题但是没用来解过最ห้องสมุดไป่ตู้二乘
matlab练 习 程 序 ( 三 种 方 法 解 最 小 二 乘 )
解最小二乘的方法有很多,这里给出常见的三种方法实现。
一是一般方法,一般都用这种方法。
二是svd分解法,之前有用过svd(见,,和)解其他问题,但是没用来解过最小二乘。
偏最小二乘回归MATLAB程序代码

偏最小二乘回归MATLAB程序代码单因变量functiony=pls(pz)[row,col]=size(pz);aver=mean(pz);stdcov=std(pz);%求均值和标准差rr=corrcoef(pz);%求相关系数矩阵%data=zscore(pz);%数据标准化stdarr=(pz-aver(ones(row,1),:))./stdcov(ones(row,1),:);%标准化数据结果与zscore()——致x0=pz(:,1:col-1);y0=pz(:,end);%提取原始的自变量、因变量数据e0=stdarr(:,1:col-1);f0=stdarr(:,end);%提取标准化后的自变量、因变量数据num=size(e0,1);%求样本点的个数temp=eye(col-1);%对角阵fori=1:col-1%以下计算w,w*和t的得分向量,w(:,i)=(e0'*f0)/norm(e0'*f0);t(:,i)=e0*w(:,i)%计算成分ti的得分alpha(:,i)=e0'*t(:,i)/(t(:,i)'*t(:,i))%计算alpha_i,其中(t(:,i)'*t(:,i))等价于norm(t(:,i))A2e=e0-t(:,i)*alpha(:,i)'%计算残差矩阵e0=e;%计算w*矩阵ifi==1w_star(:,i)=w(:,i);elseforj=1:i-1temp=temp*(eye(col-1)-w(:,j)*alpha(:,j)');endw_star(:,i)=temp*w(:,i);end%以下计算ss(i)的值beta=[t(:,1:i),ones(num,1)]\f0%求回归方程的系数beta(end,:)=[];%删除回归分析的常数项cancha=f0-t(:,1:i)*beta;%求残差矩阵ss(i)=sum(sum(cancha.A2));%求误差平方和%以下计算press(i)forj=1:numt1=t(:,1:i);f1=f0;she_t=t1(j,:);she_f=f1(j,:);%把舍去的第j个样本点保存起来t1(j,:)=[];f1(j,:)=[];%删除第j个观测值beta1=[t1,ones(num-1,1)]\f1;%求回归分析的系数beta1(end,:)=[];%删除回归分析的常数项cancha=she_f-she_t*beta1;%求残差向量press_i(j)=sum(cancha.A2);endpress(i)=sum(press_i)ifi>1Q_h2(i)=1-press(i)/ss(i-1)elseQ_h2(1)=1endifQ_h2(i)<0.0985fprintf('提出的成分个数r=%d',i);r=i;breakendendbeta_z=[t,ones(num,1)]\f0;%求标准化Y关于主成分得分向量t的回归系数beta_z(end,:)=[];%删除常数项xishu=w_star*beta_z;%求标准化丫关于X的回归系数,且是针对标准数据的回归系数, 每一列是一个回归方程mu_x=aver(1:col-1);mu_y=aver(end);sig_x=stdcov(1:col-1);sig_y=stdcov(end);ch0=mu_y-mu_x./sig_x*sig_y*xishu;%计算原始数据的回归方程的常数项xish=xishu'./sig_x*sig_y;%计算原始数据的回归方程的系数,每一列是一个回归方程Rc=corrcoef(x0*xish'+ch0,y0)sol=[ch0;xish']%显示回归方程的系数,每一列是一个方程,每一列的第一个数是常数项多因变量functiony=pls(pz,Xnum,Ynum)[row,col]=size(pz);aver=mean(pz);stdcov=std(pz);%求均值和标准差rr=corrcoef(pz);%求相关系数矩阵data=zscore(pz);%数据标准化stdarr=(pz-aver(ones(row,1),:))./stdcov(ones(row,1),:);%标准化自变量n=Xnum;m=Ynum;%n是自变量的个数,m是因变量的个数x0=pz(:,1:n);y0=pz(:,n+1:end);%提取原始的自变量、因变量数据e0=data(:,1:n);f0=data(:,n+1:end);%提取标准化后的自变量、因变量数据num=size(e0,1);%求样本点的个数temp=eye(n);%对角阵fori=1:n%以下计算w,w*和t的得分向量,matrix=e0'*f0*f0'*e0;[vec,val]=eig(matrix)%求特征值和特征向量val=diag(val);%提出对角线元素[val,ind]=sort(val,'descend');w(:,i)=vec(:,ind(1))%提出最大特征值对应的特征向量%计算成分ti的得分alpha(:,i)=e0'*t(:,i)/(t(:,i)'*t(:,i))%计算alpha_i,其中(t(:,i)'*t(:,i))等价于norm(t(:,i))A2 e=e0-t(:,i)*alpha(:,i)'%计算残差矩阵e0=e;%计算w*矩阵ifi==1w_star(:,i)=w(:,i);elseforj=1:i-1temp=temp*(eye(n)-w(:,j)*alpha(:,j)');endw_star(:,i)=temp*w(:,i);end%以下计算ss(i)的值beta=[t(:,1:i),ones(num,1)]\f0%求回归方程的系数beta(end,:)=[];%删除回归分析的常数项cancha=f0-t(:,1:i)*beta;%求残差矩阵ss(i)=sum(sum(cancha.A2));%求误差平方和%以下计算press(i)forj=1:numt1=t(:,1:i);f1=f0;she_t=t1(j,:);she_f=f1(j,:);%把舍去的第j个样本点保存起来t1(j,:)=[];f1(j,:)=[];%删除第j个观测值beta1=[t1,ones(num-1,1)]\f1;%求回归分析的系数beta1(end,:)=[];%删除回归分析的常数项cancha=she_f-she_t*beta1;%求残差向量press_i(j)=sum(cancha.A2);endpress(i)=sum(press_i)ifi>1Q_h2(i)=1-press(i)/ss(i-1)elseQ_h2(1)=1endifQ_h2(i)<0.0985fprintf('提出的成分个数r=%d',i);r=i;breakendendbeta_z=[t(:,1:r),ones(num,1)]\f0;%求标准化Y关于t的回归系数beta_z(end,:)=[];%删除常数项xishu=w_star(:,1:r)*beta_z;%求标准化Y关于X的回归系数,且是针对标准数据的回归系数,每一列是一个回归方程mu_x=aver(1:n);mu_y=aver(n+1:end);sig_x=stdcov(1:n);sig_y=stdcov(n+1:end);fori=1:mch0(i)=mu_y(i)-mu_x./sig_x*sig_y(i)*xishu(:,i);%计算原始数据的回归方程的常数项endfori=1:mxish(:,i)=xishu(:,i)./sig_x'*sig_y(i);%计算原始数据的回归方程的系数,每一列是一个回归方程endsol=[ch0;xish]%显示回归方程的系数,每一列是一个方程,每一列的第一个数是常数项。
matlab最小二乘法求空间平面方程
matlab最小二乘法求空间平面方程假设给定的数据为(x1,y1,z1),(x2,y2,z2),...,(xn,yn,zn),需要采用最小二乘法求解空间平面方程。
空间平面方程一般可以表示为ax + by + cz + d = 0,其中a、b、c表示平面的法向量,d表示平面的截距。
为了求解平面方程,需要先构建最小二乘法的误差函数,一般取平面点到数据点距离的平方之和作为误差函数,即E(a,b,c,d) = Σ(xi*a + yi*b + zi*c + d)^2 (i=1,2,...,n)误差函数E(a,b,c,d)的最小值可以通过对它的偏导数求解得到。
分别对a,b,c,d求偏导数,得到:∂E/∂a = 2Σ(xi*a + yi*b + zi*c + d)*xi∂E/∂b = 2Σ(xi*a + yi*b + zi*c + d)*yi∂E/∂c = 2Σ(xi*a + yi*b + zi*c + d)*zi∂E/∂d = 2Σ(xi*a + yi*b + zi*c + d)令上述偏导数都等于0,可以得到线性方程组:Σxi^2*a + Σxi*yi*b + Σxi*zi*c + Σxi*d = - Σxi*ziΣxi*yi*a + Σyi^2*b + Σyi*zi*c + Σyi*d = - Σyi*ziΣxi*zi*a + Σyi*zi*b + Σzi^2*c + Σzi*d = - Σzi^2Σxi*a + Σyi*b + Σzi*c + nd = 0其中nx、ny、nz分别表示数据点的个数。
将上述线性方程组使用矩阵的形式表示,得到A*c = B其中:c = [a;b;c;d]A = [Σxi^2 Σxi*yi Σxi*zi Σxi; Σxi*yi Σyi^2 Σyi*zi Σyi; Σxi*zi Σyi*zi Σzi^2 Σzi; Σxi Σyi Σzi n]B = [-Σxi*zi; -Σyi*zi; -Σzi^2; 0]使用matlab进行求解,代码如下:%构造数据x = [1,2,3,4,5];y = [1,3,5,7,9];z = [1,4,7,10,13];n = length(x);%构造矩阵A和向量BA = [sum(x.^2), sum(x.*y), sum(x.*z), sum(x);sum(x.*y), sum(y.^2), sum(y.*z), sum(y);sum(x.*z), sum(y.*z), sum(z.^2), sum(z);sum(x), sum(y), sum(z), n];B = [-sum(x.*z); -sum(y.*z); -sum(z.^2); 0];%解线性方程组c = A\B;%计算平面方程a = c(1);b = c(2);c = c(3);d = c(4);%输出平面方程fprintf('The equation of the plane is: %fx + %fy + %fz +%f = 0\n',a,b,c,d);运行以上代码,输出平面方程为:2.000000x + 0.000000y - 1.000000z -5.550000 = 0。
ESPRIT算法(最小二乘法)matlab程序
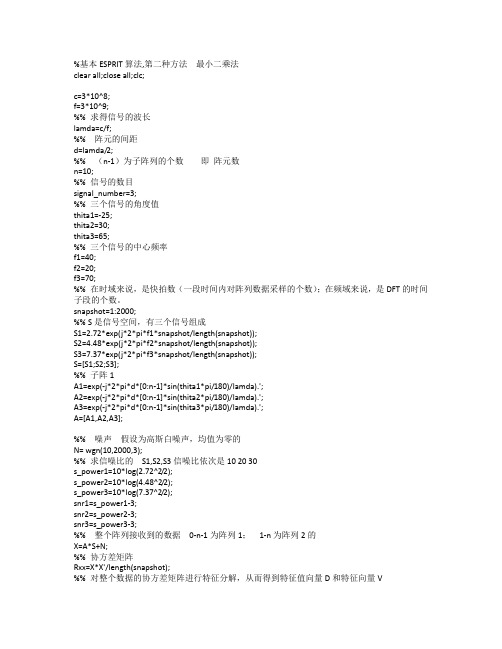
%基本ESPRIT算法,第二种方法最小二乘法clear all;close all;clc;c=3*10^8;f=3*10^9;%% 求得信号的波长lamda=c/f;%%阵元的间距d=lamda/2;%% (n-1)为子阵列的个数即阵元数n=10;%% 信号的数目signal_number=3;%% 三个信号的角度值thita1=-25;thita2=30;thita3=65;%% 三个信号的中心频率f1=40;f2=20;f3=70;%% 在时域来说,是快拍数(一段时间内对阵列数据采样的个数);在频域来说,是DFT的时间子段的个数。
snapshot=1:2000;%% S是信号空间,有三个信号组成S1=2.72*exp(j*2*pi*f1*snapshot/length(snapshot));S2=4.48*exp(j*2*pi*f2*snapshot/length(snapshot));S3=7.37*exp(j*2*pi*f3*snapshot/length(snapshot));S=[S1;S2;S3];%% 子阵1A1=exp(-j*2*pi*d*[0:n-1]*sin(thita1*pi/180)/lamda).';A2=exp(-j*2*pi*d*[0:n-1]*sin(thita2*pi/180)/lamda).';A3=exp(-j*2*pi*d*[0:n-1]*sin(thita3*pi/180)/lamda).';A=[A1,A2,A3];%% 噪声假设为高斯白噪声,均值为零的N= wgn(10,2000,3);%% 求信噪比的S1,S2,S3信噪比依次是10 20 30s_power1=10*log(2.72^2/2);s_power2=10*log(4.48^2/2);s_power3=10*log(7.37^2/2);snr1=s_power1-3;snr2=s_power2-3;snr3=s_power3-3;%% 整个阵列接收到的数据0-n-1为阵列1;1-n为阵列2的X=A*S+N;%% 协方差矩阵Rxx=X*X'/length(snapshot);%% 对整个数据的协方差矩阵进行特征分解,从而得到特征值向量D和特征向量V[V,D]=eig(Rxx);%[Y,I]=sort(diag(D));Us=V(:,n-signal_number+1:n);%% 两个方阵张成的两个子空间U1=Us(1:n-1,:);U2=Us(2:n,:);%% 利用最小二乘法求得旋转不变关系矩阵,然后进行特征分解[p,q]=eig(inv(U1'*U1)*U1'*U2); %张贤达《矩阵分析与应用》第528页%% 利用上面求得的矩阵来获得角度for i=1:signal_number;alpha(i)=real(asin(-j*(log(q(i,i)))*lamda/(-2*pi*d))*180/pi);end;%% 作图stem(alpha,ones(1,signal_number),'r--');grid;axis([-90 90 0 2]);text(alpha(1)-4,1.1,num2str(alpha(1)));text(alpha(1)-15,1.4,'信号1,信噪比为10'); text(alpha(2)-4,1.1,num2str(alpha(2)));text(alpha(2)-15,1.4,'信号2,信噪比为20'); text(alpha(3)-4,1.1,num2str(alpha(3)));text(alpha(3)-15,1.4,'信号3,信噪比为30'); ylabel('DOA估计的角度值');xlabel('角度');title('ESPRIT算法DOA估计');。
matlab 最小二乘法 多个自变量

matlab 最小二乘法多个自变量多个自变量的最小二乘法在MATLAB中的应用最小二乘法(Least Squares Method)是一种常见的数据拟合方法,在MATLAB中具有广泛的应用。
它可以用于多个自变量的情况,即多元线性回归问题。
本文将介绍如何使用MATLAB进行多个自变量的最小二乘法拟合,并给出一个实际案例进行说明。
我们需要明确什么是多元线性回归问题。
在统计学中,回归分析是研究两个或多个变量之间关系的一种方法。
多元线性回归是回归分析中的一种常见形式,其模型可以表示为:Y = β0+ β1*X1 + β2*X2 + ... + βn*Xn + ε其中,Y是因变量,X1、X2、...、Xn是自变量,β0、β1、β2、...、βn是回归系数,ε是误差项。
我们的目标是通过拟合数据,估计回归系数的值。
在MATLAB中,可以使用“polyfit”函数来进行多元线性回归拟合。
该函数的基本用法如下:p = polyfit(X, Y, n)其中,X是自变量的矩阵,Y是因变量的向量,n是多项式的次数。
函数的返回值p是一个向量,包含了拟合多项式的系数。
使用polyval函数可以通过这些系数来计算拟合的值。
下面我们通过一个实际案例来演示多个自变量的最小二乘法拟合在MATLAB中的应用。
假设我们有一组数据,包含两个自变量X1和X2,和一个因变量Y。
我们的目标是通过这些数据来拟合一个多元线性回归模型。
我们需要准备数据。
我们可以使用rand函数生成一组随机数据作为示例数据,代码如下:X1 = rand(100,1);X2 = rand(100,1);Y = 2*X1 + 3*X2 + randn(100,1);接下来,我们可以使用polyfit函数进行拟合,代码如下:p = polyfit([X1, X2], Y, 1);这里我们将X1和X2合并成一个矩阵作为自变量。
函数的第三个参数1表示拟合一个一次多项式。
拟合完成后,我们可以使用polyval函数来计算拟合的值,代码如下:Y_fit = polyval(p, [X1, X2]);现在,我们已经得到了拟合的值Y_fit。
matlab 最小二乘逆
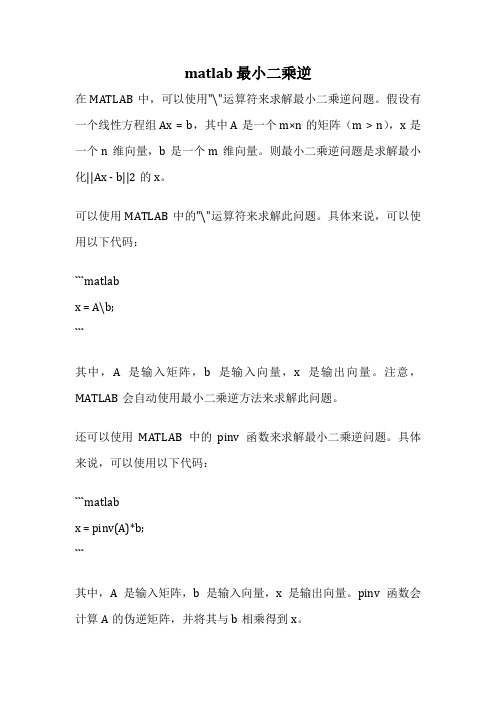
matlab 最小二乘逆
在MATLAB中,可以使用"\"运算符来求解最小二乘逆问题。
假设有一个线性方程组Ax = b,其中A是一个m×n的矩阵(m > n),x是一个n维向量,b是一个m维向量。
则最小二乘逆问题是求解最小化||Ax - b||2的x。
可以使用MATLAB中的"\"运算符来求解此问题。
具体来说,可以使用以下代码:
```matlab
x = A\b;
```
其中,A是输入矩阵,b是输入向量,x是输出向量。
注意,MATLAB会自动使用最小二乘逆方法来求解此问题。
还可以使用MATLAB中的pinv函数来求解最小二乘逆问题。
具体来说,可以使用以下代码:
```matlab
x = pinv(A)*b;
```
其中,A是输入矩阵,b是输入向量,x是输出向量。
pinv函数会计算A的伪逆矩阵,并将其与b相乘得到x。
需要注意的是,在使用"\"运算符或pinv函数求解最小二乘逆问题时,输入矩阵A的列数必须大于行数,即m > n。
否则,无法求解最小二乘逆问题。