输入捕捉中断编程实例
单片机中断触发方式代码

单片机中断触发方式代码【实用版】目录1.单片机中断概述2.中断触发方式3.代码实例解析正文【单片机中断概述】单片机中断是指在程序运行过程中,由于某种原因导致的程序执行流程被暂时打断,转去处理其他任务,待处理完毕后再回到原程序继续执行。
中断在单片机系统中具有重要作用,例如按键、传感器、通信等外部事件的处理,以及系统异常情况的监测等。
【中断触发方式】在单片机中,中断可以通过以下几种方式触发:1.硬件触发:外部硬件设备通过引脚触发中断,例如按键、传感器等。
2.软件触发:程序内部通过函数或指令触发中断,例如定时器溢出、计数器溢出等。
3.串行通信触发:通过串行通信接口接收到的数据触发中断,例如UART 接收到数据。
4.异常触发:单片机内部检测到异常情况触发中断,例如复位、看门狗超时等。
【代码实例解析】以硬件触发方式为例,使用单片机的定时器触发中断。
以下是一个简单的示例代码:#include <reg52.h>#include <intrins.h>sbit T0_TRG = P1^0; // 定时器 0 触发端口定义void timer0_isr() interrupt 1 // 定时器 0 中断服务函数{TH0 = 0x00; // 清除定时器 0 中断标志TL0 = 0x00; // 清除定时器 0 中断标志// 在这里添加中断处理代码}void main(){TMOD = 0x20; // 定时器 0 工作在方式 2,即 16 位自动重装模式TH0 = 0x00; // 设置定时器 0 计数值为 0TL0 = 0x00; // 设置定时器 0 计数值为 0EA = 1; // 开总中断ET0 = 1; // 开定时器 0 中断TR0 = 1; // 启动定时器 0while (1){// 在这里添加主程序代码}```在上述代码中,定时器 0 的触发端通过引脚 P1^0 连接到外部硬件设备,当外部硬件设备产生触发信号时,定时器 0 会触发中断。
PLC中断功能

PLC中断功能plc这样理解中断功能,在理解中断时,首先要清楚plc的运算周期或者说是扫描周期,有必要说下plc顺控循环执行的流程,这是理解中断的前提,必须要掌握,分为三部分,输入处理、程序处理、输出处理1、输入处理,可编程控制器在执行程序前,将可编程控制器的所有输入端子的ON/OFF状态读入输入映像区,程序执行过程中即使输入发生变化,输入映像区的内容也不会变化,在执行下一个循环的输入处理时读取该变化。
2、程序处理、plc根据程序内存中的指令内容,从输入映像区和其他软元件的映像区中读出各软元件的ON/OFF状态,然后从0步依次开始运算,并将每次得出的结果写入到映像区中。
因此,各软元件的映像区随着程序的执行逐步改变其内容,此外,输出继电器的内部触点根据输出映像区的内容而执行动作。
3、输出处理,所有指令执行结束后,输出Y映像区中的,ON/OFF状态会传送至输出锁存内存,这个就作为可编程控制器的实际输出。
执行以一次动作所需要的时间就是运算周期也叫扫描时间,那么中断与扫描周期有什么联系呢,中断就是不按照从上到下顺序的完整执行,而是中断程序优先单独运行程序处理而且是立即输出不参与整个周期运算。
中断的作用是什么呢,我们知道plc扫描周期是很短的,因此我们很难看出plc顺控执行过程,这里我们不妨假设扫描周期为10s的时间,就是执行全部的程序需要10s的时间,有一个很简单的程序LD X0,OUT Y0,根据上图当X0为ON时,Y0不是马上就有输出的,而是等到10s后才输出,断开X0后,同样Y0也不是马上就关闭的,都需要得到扫描完后才有结果。
那么这样在我们实际应用中plc就没什么使用了设备就无法进行工作了,这时候就需要中断处理了,采用输入中断功能,立即执行输入。
实际上plc的运算时间是很短只有几毫秒,完全能够满足需要,但一些如高频脉冲输入、脉冲捕捉等时间在微秒级的肯定要受到周期运算的影响了。
因此如果在一个周期内要完成很多次ON/OFF状态处理时,必须使用中断功能了。
STM32F407通用定时器输入捕获
通用定时器输入捕获通用定时器作为输入捕获的使用。
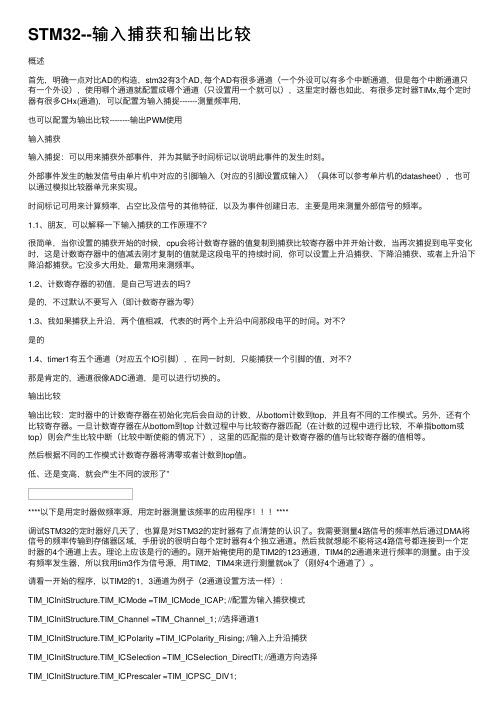
我们用TIM5的通道1(PA0)来做输入捕获,捕获PA0上高电平的脉宽(用KEY_UP按键输入高电平),通过串口来打印高电平脉宽时间。
输入捕获模式可以用来测量脉冲宽度或者测量频率。
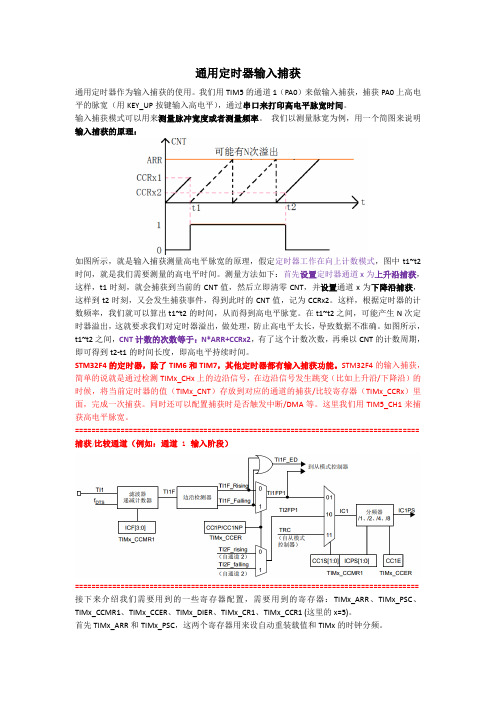
我们以测量脉宽为例,用一个简图来说明输入捕获的原理:如图所示,就是输入捕获测量高电平脉宽的原理,假定定时器工作在向上计数模式,图中t1~t2时间,就是我们需要测量的高电平时间。
测量方法如下:首先设置定时器通道x为上升沿捕获,这样,t1时刻,就会捕获到当前的CNT值,然后立即清零CNT,并设置通道x为下降沿捕获,这样到t2时刻,又会发生捕获事件,得到此时的CNT值,记为CCRx2。
这样,根据定时器的计数频率,我们就可以算出t1~t2的时间,从而得到高电平脉宽。
在t1~t2之间,可能产生N次定时器溢出,这就要求我们对定时器溢出,做处理,防止高电平太长,导致数据不准确。
如图所示,t1~t2之间,CNT计数的次数等于:N*ARR+CCRx2,有了这个计数次数,再乘以CNT的计数周期,即可得到t2-t1的时间长度,即高电平持续时间。
STM32F4的定时器,除了TIM6和TIM7,其他定时器都有输入捕获功能。
STM32F4的输入捕获,简单的说就是通过检测TIMx_CHx上的边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT)存放到对应的通道的捕获/比较寄存器(TIMx_CCRx)里面,完成一次捕获。
同时还可以配置捕获时是否触发中断/DMA等。
这里我们用TIM5_CH1来捕获高电平脉宽。
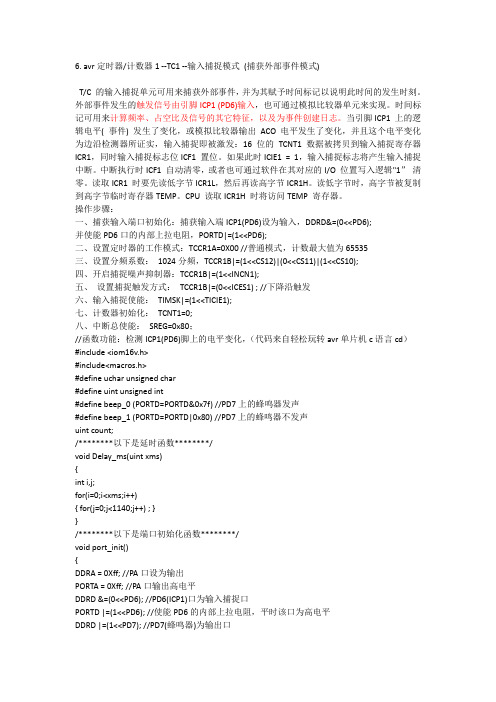
=================================================================================== 捕获/比较通道(例如:通道 1 输入阶段)=================================================================================== 接下来介绍我们需要用到的一些寄存器配置,需要用到的寄存器:TIMx_ARR、TIMx_PSC、TIMx_CCMR1、TIMx_CCER、TIMx_DIER、TIMx_CR1、TIMx_CCR1 (这里的x=5)。
输入捕捉
/********以下是延时函数********/
void Delay_ms(uint xms)
{
int i,j;
for(i=0;i<xms;i++)
{ for(j=0;j<1140;j++) ; }
}
/********以下是端口初始化函数********/
void port_init()
6. avr定时器/计数器1 --TC1 --输入捕捉模式(捕获外部事件模式)
T/C的输入捕捉单元可用来捕获外部事件,并为其赋予时间标记以说明此时间的发生时刻。外部事件发生的触发信号由引脚ICP1 (PD6)输入,也可通过模拟比较器单元来实现。时间标记可用来计算频率、占空比及信号的其它特征,以及为事件创建日志。当引脚ICP1上的逻辑电平(事件)发生了变化,或模拟比较器输出ACO电平发生了变化,并且这个电平变化为边沿检测器所证实,输入捕捉即被激发:16位的TCNT1数据被拷贝到输入捕捉寄存器ICR1,同时输入捕捉标志位ICF1置位。如果此时ICIE1 = 1,输入捕捉标志将产生输入捕捉中断。中断执行时ICF1自动清零,或者也可通过软件在其对应的I/O位置写入逻辑"1”清零。读取ICR1时要先读低字节ICR1L,然后再读高字节ICR1H。读低字节时,高字节被复制到高字节临时寄存器TEMP。CPU读取ICR1H时将访问TEMP寄存器。
操作步骤:
一、捕获输入端口初始化:捕获输入端ICP1(PD6)设为输入,DDRD&=(0<<PD6);
并使能PD6口的内部上拉电阻,PORTD|=(1<<PD6);
二、设置定时器的工作模式:TCCR1A=0X00 //普通模式,计数最大值为65535
stm32PWM输入捕获
stm32PWM输入捕获tm32定时器pwm输入捕获输入捕捉的功能是记录下要捕捉的边沿出现的时刻,如果你仅仅捕捉下降沿,那么两次捕捉的差表示输入信号的周期,即两次下降沿之间的时间。
如果要测量低电平的宽度,你应该在捕捉到下降沿的中断处理中把捕捉边沿改变为上升沿,然后把两次捕捉的数值相减就得到了需要测量的低电平宽度。
如果要的测量低电平太窄,中断中来不及改变捕捉方向时,或不想在中断中改变捕捉方向,则需要使用PWM输入模式,或使用两个TIM某通道,一个通道捕捉下降沿,另一个通道捕捉上升沿,然后对两次捕捉的数值相减。
PWM输入模式也是需要用到两个通道。
使用两个通道时,最好使用通道1和通道2,或通道3和通道4,这样上述功能只需要使用一个I/O管脚,详细请看STM32技术参考手册中的TIM某框图。
//0-----------------------一、概念理解PWM输入捕获模式是输入捕获模式的特例,自己理解如下1.每个定时器有四个输入捕获通道IC1、IC2、IC3、IC4。
且IC1IC2一组,IC3IC4一组。
并且可是设置管脚和寄存器的对应关系。
2.同一个TI某输入映射了两个IC某信号。
3.这两个IC某信号分别在相反的极性边沿有效。
4.两个边沿信号中的一个被选为触发信号,并且从模式控制器被设置成复位模式。
5.当触发信号来临时,被设置成触发输入信号的捕获寄存器,捕获“一个PWM周期(即连续的两个上升沿或下降沿)”,它等于包含TIM时钟周期的个数(即捕获寄存器中捕获的为TIM的计数个数n)。
6.同样另一个捕获通道捕获触发信号和下一个相反极性的边沿信号的计数个数m,即(即高电平的周期或低电平的周期)7.由此可以计算出PWM的时钟周期和占空比了frequency=f(TIM时钟频率)/n。
dutycycle=(高电平计数个数/n),若m为高电平计数个数,则dutycycle=m/n若m为低电平计数个数,则dutycycle=(n-m)/n 注:因为计数器为16位,所以一个周期最多计数65535个,所以测得的最小频率=TIM时钟频率/65535。
第五章 IO端口、输入捕捉
• 图5-2: 共用的端口结构框图
• 5.3.1 I/O 与多个外设复用
• 对于有些dsPIC30F 器件,尤其是那些带有少量 I/O 引脚数较少的器件,其每个I/O 引脚可能要 复用多种外设功能。图5-2 所示为两个外设与同 一个I/O 引脚复用的示例。
• 和TRISx 寄存器以及该端口引脚将读作0
5.3 外设复用
• 当某个外设使能时,与其相关的引脚将被禁止作为通 用I/O 引脚使用。可以通过输入数据路径读该I/O 引脚, 但该I/O 端口位的输出驱动器将被禁止。
• 与另一个外设共用一个引脚的I/O 端口总是服从于该外 设。外设的输出缓冲器数据和控制信号提供给一对多 路开关。该多路开关选择是外设还是相关的端口拥有 输出数据的所有权以及I/O 引脚的控制信号。图11-2 显示了端口如何与其他外设共用,以及与外设连接的 相关I/O 引脚。
• 参照图5-2,外设多路开关的结构将决定外设输 入引脚是否可以通过使用PORT 寄存器用软件控 制。
• 当图中所示的概念化的外设在功能被使能时,会断开 I/O 引脚与端口数据的连接。一般而言,下列外设允许 通过PORT 寄存器手动控制它们的输入引脚:
• 外部中断引脚 • 定时器时钟输入引脚 • 输入捕捉引脚 • PWM 故障引脚 • 大多数串行通信外设在使能时,将完全控作0 • bit 13 ICSIDL:输入捕捉模块在空闲时停止控制位 • 1 = 输入捕捉模块在CPU 空闲模式将停止 • 0 = 输入捕捉模块在CPU 空闲模式将继续工作 • bit 12-8 未用:读作0 • bit 7 ICTMR:输入捕捉定时器选择位 • 1 = 捕捉事件时捕捉TMR2 的内容 • 0 = 捕捉事件时捕捉TMR3 的内容 • 注: 可供选择的定时器可能会和上述不同。 更多详细
51单片机中断程序例子

51单片机中断程序例子
1. 外部中断:当外部信号引脚检测到高电平时,单片机会触发外部中断服务程序。
可以利用外部中断实现按键扫描功能,当按键按下时,触发中断程序对按键进行处理。
2. 定时器中断:利用定时器中断可以实现精确的时间控制。
例如,我们可以设置定时器中断为1秒,当定时器溢出时,触发中断程序,实现1秒钟执行一次的任务。
3. 串口中断:当接收到串口数据时,单片机会触发串口中断服务程序,可以利用串口中断实现串口通信功能。
4. ADC中断:当模数转换器完成一次转换时,单片机会触发ADC中断服务程序,可以利用ADC中断实现模拟信号的采集和处理。
5. 看门狗中断:看门狗定时器溢出时,单片机会触发看门狗中断服务程序,可以利用看门狗中断实现系统复位或其他相关功能。
6. 外部中断优先级:当多个外部中断同时触发时,可以通过设置外部中断的优先级来确定触发的顺序和优先级。
7. 定时器中断优先级:当多个定时器中断同时触发时,可以通过设置定时器中断的优先级来确定触发的顺序和优先级。
8. 中断嵌套:单片机支持中断嵌套,即在一个中断服务程序中触发
另一个中断服务程序,可以通过中断嵌套实现复杂的任务处理。
9. 中断屏蔽:单片机支持对中断的屏蔽,即可以通过设置中断屏蔽标志位来屏蔽某些中断,使其暂时不被触发。
10. 中断标志位:单片机提供中断标志位,用于标识中断是否被触发。
在中断服务程序中,可以通过读取和清除中断标志位来判断中断是否发生。
以上是根据51单片机中断程序的例子进行的描述,这些例子涵盖了常见的中断类型和相关功能。
通过学习和理解这些例子,可以更好地掌握51单片机中断编程的原理和方法。
中断程序的编程实例
中断程序的编程实例哎呀,今天真是忙得不可开交,一大早就被老板叫去开会,说是要讨论一个新项目的编程实例。
我心里嘀咕着,这项目可不简单,得好好琢磨琢磨。
一进会议室,就看到老张坐在那儿,手里拿着杯咖啡,眉头紧锁。
我走过去拍了拍他的肩膀,笑着说:“老张,怎么了?又被代码折磨了?”老张抬头看了我一眼,叹了口气:“可不是嘛,这中断程序的编程实例,简直是个大坑。
我昨晚熬到半夜,愣是没搞定。
”我坐下来,拿起桌上的资料翻了翻,心里也有些打鼓。
这中断程序可不是闹着玩的,稍有不慎,整个系统都得崩溃。
我一边翻资料,一边和老张讨论起来。
“你说,这中断程序的核心是什么?”我问道。
老张想了想,说:“我觉得关键是中断处理函数的编写,得确保它能在最短的时间内完成任务,不影响系统的正常运行。
”我点点头,觉得老张说得有道理。
“对,而且还得考虑中断的优先级,不能让低优先级的中断打断高优先级的任务。
”正说着,小李也进来了,手里拿着笔记本,一脸疲惫。
“你们在讨论什么呢?”他问道。
“我们在说中断程序的编程实例,”我回答,“你有什么想法吗?”小李坐下来,揉了揉太阳穴,说:“我觉得我们可以考虑用状态机来管理中断,这样能更好地控制中断的流程。
”我眼前一亮,觉得小李的建议挺有创意。
“好主意!状态机确实能提高中断处理的效率。
”老张也点头表示赞同:“对,我们可以试试用状态机来实现中断处理函数。
”我们三个人你一言我一语,讨论得热火朝天。
时间不知不觉就过去了,转眼间已经到了中午。
我看了看手表,笑着说:“走吧,先去吃饭,下午再继续讨论。
”老张和小李也站了起来,我们一边往外走,一边还在讨论中断程序的细节。
虽然任务艰巨,但有伙伴们的支持,我觉得信心满满。
下午回到办公室,我们继续投入到编程实例的编写中。
虽然过程中遇到了不少困难,但我们互相鼓励,互相帮助,最终还是顺利完成了任务。
当最后一个bug被修复,程序成功运行时,我们三个人都松了一口气,相视而笑。
老张拍了拍我的肩膀,说:“兄弟,干得不错!”我笑着回应:“都是大家的功劳,没有你们的帮助,我一个人可搞不定。
stm32adc中断函数例程

stm32adc中断函数例程STM32是意法半导体(STMicroelectronics)推出的一系列32位微控制器系列。
STM32微控制器提供了丰富的外设支持,其中之一是ADC(模数转换器)。
ADC是一种将模拟信号转换为数字信号的设备。
在嵌入式系统中,ADC通常用来将传感器检测到的模拟信号转换为数字信号,以便处理和分析。
在STM32中,ADC外设具有完善的功能和配置选项。
为了实现ADC 的连续转换,并能够在转换完成时触发一个中断,我们需要配置ADC 中的一些寄存器,并编写相应的中断处理函数。
以下是一个在STM32中使用ADC中断的例程。
首先,我们需要确保已正确配置ADC外设和相应的GPIO引脚,以使其能够读取模拟信号。
这些配置通常在启动文件中完成,此处不再赘述。
接下来,我们需要定义一些全局变量和函数,用于处理ADC中断事件。
假设我们要使用ADC1外设,我们将设置全局变量以保存ADC转换结果,并在中断处理函数中更新该变量。
```cuint16_t adcValue;void ADC_IRQHandler(void){if(ADC1->SR & ADC_SR_EOC){adcValue = ADC1->DR;}}```在上述代码中,我们定义了一个名为`adcValue`的全局变量,用于存储ADC转换结果。
`ADC_IRQHandler`是我们编写的中断处理函数,我们将在接下来的步骤中将其配置为与ADC1外设的中断线相连。
我们还要在代码的某处初始化ADC,并配置相关的中断使能。
以下是一个示例:```cvoid ADC_Init(void){RCC->APB2ENR |= RCC_APB2ENR_ADC1EN; //启用ADC1时钟ADC1->CR2 |= ADC_CR2_CONT; //连续转换模式ADC1->CR2 |= ADC_CR2_DMA; //使用DMA传输ADC1->CR2 |= ADC_CR2_ADON; //启动ADCADC1->SMPR1 |= ADC_SMPR1_SMP16; //设置采样时间ADC1->SQR3 |= 16; //设置转换通道ADC1->CR1 |= ADC_CR1_EOCIE; //使能转换完成中断NVIC_EnableIRQ(ADC_IRQn); //使能对应中断向量的中断}void ADC_Start(void){ADC1->CR2 |= ADC_CR2_SWSTART; //启动转换}```在上述代码中,我们首先使能了ADC1的时钟,并配置了一些转换参数。
Atmega16单片机开发教程

Atmega16寄存器Atmega16寄存器一.引脚说明表1 引脚说明引脚序号 引脚名称 引脚功能PB5 8 位双向I/O 口, 具有可编程的内部上拉电阻。
其输出缓冲器具有对称的驱动特性,可以输出和吸收大电流。
作为输入使用时, 若内部上拉电阻使能,端口被外部电路拉低时将输出电流。
在复位过程中,即使系统时钟还未起振,端口A 处于高阻状态。
1MOSI SPI 总线的主机输出/ 从机输入信号PB6 8 位双向I/O 口2MISO SPI 总线的主机输入/ 从机输出信号PB7 8 位双向I/O 口3SCK SPI 总线的串行时钟4 RESET 复位输入引脚。
持续时间超过最小门限时间的低电平将引起系统复位。
5 VCC 数字电路的电源6 GND 地7 XTAL2 反向振荡放大器的输出端8 XTAL1 反向振荡放大器与片内时钟操作电路的输入端PD0 8 位双向I/O 口9RXD USART 输入引脚PD1 8 位双向I/O 口10TXD USART 输出引脚PD2 8 位双向I/O 口11INT0 外部中断0 的输入PD3 8 位双向I/O 口12INT1 外部中断1 的输入Atmega16寄存器PD4 8 位双向I/O 口13OC1B T/C1 输出比较B 匹配输出PD5 8 位双向I/O 口14OC1A T/C1 输出比较A 匹配输出PD6 8 位双向I/O 口15ICP1 T/C1 输入捕捉引脚PD7 8 位双向I/O 口16OC2 T/C2 输出比较匹配输出17 VCC 数字电路的电源18 GND 地PC0 8 位双向I/O 口19SCL 两线串行总线时钟线PC1 8 位双向I/O 口20SDA 两线串行总线数据输入/ 输出线PC2 8 位双向I/O 口21TCK JTAG 测试时钟PC3 8 位双向I/O 口22TMS JTAG 测试模式选择PC4 8 位双向I/O 口23TDO JTAG 测试数据输出PC5 8 位双向I/O 口24TDI JTAG 测试数据输入PC6 8 位双向I/O 口25TOSC1 定时振荡器引脚1PC7 8 位双向I/O 口26TOSC2 定时振荡器引脚227 AVCC 端口A与A/D转换器的电源。
中断编程实例实验报告
一、实验目的1. 理解中断的概念和作用。
2. 掌握中断编程的基本方法。
3. 熟悉中断程序的编写和调试。
4. 通过实例加深对中断编程的理解。
二、实验环境1. 操作系统:Windows 102. 开发环境:Visual Studio 20193. 编程语言:C++三、实验内容本次实验以中断编程为例,通过编写一个简单的程序,实现按键输入时中断主程序的执行,并输出按键信息。
四、实验步骤1. 创建一个C++项目,命名为“中断编程实例”。
2. 在项目中创建一个名为“main.cpp”的源文件。
3. 在“main.cpp”文件中编写以下代码:```cpp#include <iostream>#include <conio.h>using namespace std;// 全局变量,用于存储按键信息char keyInfo;// 中断服务例程(ISR)void interruptServiceRoutine() {// 读取按键信息keyInfo = getch();// 中断标志清除_emit(0x20);}// 主函数int main() {// 初始化中断interruptServiceRoutine();// 设置中断向量表setvect(0x09, interruptServiceRoutine);// 执行主程序cout << "按任意键开始接收按键信息:" << endl;while (true) {// 检查按键信息是否已读取if (keyInfo != '\0') {cout << "按键信息:" << keyInfo << endl; keyInfo = '\0'; // 清除按键信息}}return 0;}```4. 编译并运行程序。
5. 按下任意键,程序将中断执行并输出按键信息。
linkboy中断函数 -回复
linkboy中断函数-回复Linkboy中断函数是指在计算机编程中,通过设置中断来中断当前程序的执行,转而执行与中断相关的子程序。
中断函数是为了处理特定的事件或情况而准备的程序段。
而中括号内的内容是"linkboy中断函数",因此本文将围绕这一主题展开,详细解释linkboy中断函数的概念、作用以及具体的实现步骤。
一、linkboy中断函数的概念1.1 什么是linkboy中断函数Linkboy中断函数是指在linkboy编程中,通过设置中断来实现对特定事件或情况的响应和处理的函数。
linkboy是一种高级编程语言,适用于单片机及其他嵌入式系统的开发。
通过使用linkboy中断函数,程序可以在遇到特定事件或情况时,自动跳转到与之相关的子程序,并执行相应的操作。
1.2 linkboy中断函数的作用在编程中,常常需要处理一些需要及时响应的事件,例如按键输入、定时器超时等。
使用linkboy中断函数,可以实现对这些事件的及时捕捉和处理,保证系统的稳定运行。
通过设置中断向量表并编写相应的中断处理函数,程序可以在主线程之外,专门处理这些中断事件,提高系统的实时性和响应能力。
二、linkboy中断函数的实现步骤2.1 确定中断源和中断类型在使用linkboy中断函数之前,需要确定中断源,即触发中断的事件或情况。
常见的中断源包括外部中断(例如按键输入)、定时器中断、串口接收中断等。
同时,还需要确定中断类型,例如上升沿触发、下降沿触发、高电平触发等。
2.2 设置中断向量表中断向量表是一张存储中断处理函数地址的表格,用于指导中断发生时的跳转。
在linkboy中断函数中,通常需要手动设置中断向量表。
具体操作可以通过修改寄存器的方式,将中断源和对应的中断处理函数地址关联起来。
2.3 编写中断处理函数中断处理函数是真正被执行的代码块,用于处理中断事件。
在编程中,需要根据中断源的类型和需求,编写相应的中断处理函数。
L9-输入扑捉输出比较

2007 许辉
6
2007 许辉
预分频器捕捉事件
• 捕捉模块有两个预分频捕捉模式。预分频模式分别由设置ICM<2:0> (ICxCON<2:0> ) 位为“100”或为“101”来选择。
• 在这些模式下,捕捉模块每计数引脚的4 或16 个上升沿才发生一次
捕捉事件Байду номын сангаас • 捕捉预分频计数器在每个捕捉引脚的有效的上升沿上增加。引脚上的
“011”来指定。在这些模式下,不使用预分频计数器。 • 输入捕捉逻辑电路根据内部相位时钟检测和同步捕捉引脚信号的上升
或下降沿。如果出现上升/ 下降沿,捕捉模块逻辑将会把当前时基值
写入捕捉缓冲器并发信号给中断产生逻辑。当发生的捕捉事件的数量 与ICI<1:0> 控制位指定的数量匹配时,那么相应的捕捉通道中断标志
位ICxIF 将会在捕捉缓冲器写事件之后2 个指令周期置1。
• 如果捕捉时基在每个指令周期都加1 的话,捕捉到的计数值将会是ICx 引脚有事件发生后1 或2个指令周期出现的值。这个延时是随ICx 沿事 件而变化的,而实际上ICx 沿事件与指令周期时钟和输入捕捉逻辑电 路延时相关。如果到捕捉时基的输入时钟被预分频,那么捕捉的值的 延时将被消除。
20
2007 许辉
21
2007 许辉
连续输出脉冲
• 设置控制位OCM<2:0>= “101 ”。此外,还应该选择和使能比较时基。 • 一旦使能,输出引脚OCx 将驱动为低电平,并保持该低电平直到比较 时基和OCxR 寄存器之间发生匹配。
– . 在比较时基与OCxR 寄存器发生比较匹配后的下一个指令时钟,OCx 引 脚驱动为高电平。OCx 引脚将保持为高电平,直到发生下一次时基和 OCxRS 寄存器匹配,此时引脚被驱动为低电平。在用户不加干涉的情况 下,在OCx 引脚上会重复产生从低到高边沿和从高到低边沿的脉冲序列。 – . OCx 引脚上将产生连续脉冲,直到改变模式或模块被禁止。 – . 比较时基将计数到相关周期寄存器中所包含的值,然后在下一个指令 时钟复位为0x0000 。 – . 如果比较时基周期寄存器值小于OCxRS 寄存器值,就不会产生下降沿。 OCx 引脚将保持为高电平,直到OCxRS <= PR2 、发生模式改变或器件复 位。 – . 在OCx 引脚被驱动为低电平后(单脉冲的下降沿)再过2 个指令时钟, 相应通道的中断标志位OCxIF 置位。
stm32 pwm输入捕捉模式学习笔记

stm32 pwm输入捕捉模式学习笔记(本文来自:android_chunhui的博客)PWM输入是输入捕获的一个特殊应用,输入捕获就是当连接到定时器的引脚上产生电平变化时对应的捕获装置会立即将当前计数值复制到另一个寄存器中。
你可以开启捕获中断然后在中断处理函数中读出保存的计数值。
主要用于读取pwm的频率和占空比。
与输入捕获不同的是PWM输入模式时,用到两个通道(一般用TIMx_CH1或TIMx_CH2),只给其中一个通道分配gpio时钟即可,另一个在内部使用。
给一个通道分配gpio时钟后,需要设置另一个为从机且复位模式。
(例如使用ch2,ch1就得设置成从机模式)。
当一个输入信号(TI1或TI2)来临时,主通道捕获上升沿,从机捕获下降沿。
假设pwm从低电平开始触发,当上升沿来临时,两个通道TIM_CNT均复位开始计数,下一个下降沿来临,从机读取TIM_CNT中的值,记为CCR1,下一个上升沿来临,主通道读取TIM_CNT的值,记为CCR2。
所以CCR2/f,为pwm周期,倒数即频率。
CCR1/CCR2就是占空比。
下面是pwm捕获模式下的配置:void Tim2_PWMIC_Init(void){TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; //***通道选择,通道一为从机TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿触发TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //管脚与寄存器对应关系TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //输入预分频。
STM32--输入捕获和输出比较
STM32--输⼊捕获和输出⽐较概述⾸先,明确⼀点对⽐AD的构造,stm32有3个AD, 每个AD有很多通道(⼀个外设可以有多个中断通道,但是每个中断通道只有⼀个外设),使⽤哪个通道就配置成哪个通道(只设置⽤⼀个就可以),这⾥定时器也如此,有很多定时器TIMx,每个定时器有很多CHx(通道),可以配置为输⼊捕捉-------测量频率⽤,也可以配置为输出⽐较--------输出PWM使⽤输⼊捕获输⼊捕捉:可以⽤来捕获外部事件,并为其赋予时间标记以说明此事件的发⽣时刻。
外部事件发⽣的触发信号由单⽚机中对应的引脚输⼊(对应的引脚设置成输⼊)(具体可以参考单⽚机的datasheet),也可以通过模拟⽐较器单元来实现。
时间标记可⽤来计算频率,占空⽐及信号的其他特征,以及为事件创建⽇志,主要是⽤来测量外部信号的频率。
1.1、朋友,可以解释⼀下输⼊捕获的⼯作原理不?很简单,当你设置的捕获开始的时候,cpu会将计数寄存器的值复制到捕获⽐较寄存器中并开始计数,当再次捕捉到电平变化时,这是计数寄存器中的值减去刚才复制的值就是这段电平的持续时间,你可以设置上升沿捕获、下降沿捕获、或者上升沿下降沿都捕获。
它没多⼤⽤处,最常⽤来测频率。
1.2、计数寄存器的初值,是⾃⼰写进去的吗?是的,不过默认不要写⼊(即计数寄存器为零)1.3、我如果捕获上升沿,两个值相减,代表的时两个上升沿中间那段电平的时间。
对不?是的1.4、timer1有五个通道(对应五个IO引脚),在同⼀时刻,只能捕获⼀个引脚的值,对不?那是肯定的,通道很像ADC通道,是可以进⾏切换的。
输出⽐较输出⽐较:定时器中的计数寄存器在初始化完后会⾃动的计数,从bottom计数到top,并且有不同的⼯作模式。
另外,还有个⽐较寄存器。
⼀旦计数寄存器在从bottom到top 计数过程中与⽐较寄存器匹配(在计数的过程中进⾏⽐较,不单指bottom或top)则会产⽣⽐较中断(⽐较中断使能的情况下),这⾥的匹配指的是计数寄存器的值与⽐较寄存器的值相等。
gd32 定时器输入捕获中断处理函数

gd32 定时器输入捕获中断处理函数(原创版)目录1.gd32 定时器输入捕获中断处理函数概述2.gd32 定时器输入捕获中断处理函数的工作原理3.gd32 定时器输入捕获中断处理函数的应用实例4.gd32 定时器输入捕获中断处理函数的优势与局限正文一、gd32 定时器输入捕获中断处理函数概述gd32 是一款基于 ARM Cortex-M3 内核的嵌入式处理器,在其内部集成了丰富的定时器功能。
其中,定时器输入捕获中断处理函数是 gd32 定时器的一个重要应用,它可以在输入信号发生变化时立即触发中断,实现对输入信号的高效捕捉和处理。
二、gd32 定时器输入捕获中断处理函数的工作原理gd32 定时器输入捕获中断处理函数的工作原理主要分为以下几个步骤:1.配置定时器:首先,根据需求配置定时器的相关参数,如时钟源、计数周期等。
2.设置输入捕获通道:根据需求选择定时器的输入捕获通道,并设置相应的触发条件。
3.开启中断:在定时器配置完成后,开启定时器输入捕获中断,使定时器在输入信号发生变化时能够触发中断。
4.编写中断处理函数:根据实际需求编写定时器输入捕获中断处理函数,实现对输入信号的处理。
5.执行中断处理函数:当输入信号发生变化时,定时器输入捕获中断处理函数将被执行,实现对输入信号的捕捉和处理。
三、gd32 定时器输入捕获中断处理函数的应用实例gd32 定时器输入捕获中断处理函数在实际应用中具有广泛的应用,例如:1.触摸屏检测:通过定时器输入捕获中断处理函数,可以实时检测触摸屏的触摸事件,实现对触摸屏的快速响应。
2.按键检测:在按键输入设备中,可以使用定时器输入捕获中断处理函数实时检测按键的状态变化,实现对按键的快速响应。
3.传感器数据采集:对于周期性变化的传感器数据,可以通过定时器输入捕获中断处理函数实时捕捉传感器数据,提高数据采集的实时性和准确性。
四、gd32 定时器输入捕获中断处理函数的优势与局限gd32 定时器输入捕获中断处理函数具有以下优势:1.实时性强:在输入信号发生变化时,能够立即触发中断,实现对输入信号的快速捕捉和处理。
定时器计数器(TC)简介以及例子说明
定时器/计数器(T/C)简介一、定时器/计数器有关的特殊功能寄存器1. 计数数寄存器TH和TL计数器寄存器是16位的,计数寄存器由TH高8位和TL低8 位构成。
在特殊功能寄存器(SFR)中,对应T/C0为TH0和TL0,对应T/C1为TH1和TL1。
定时器/计数器的初始值通过TH1/TH0和TL1/TL0设置。
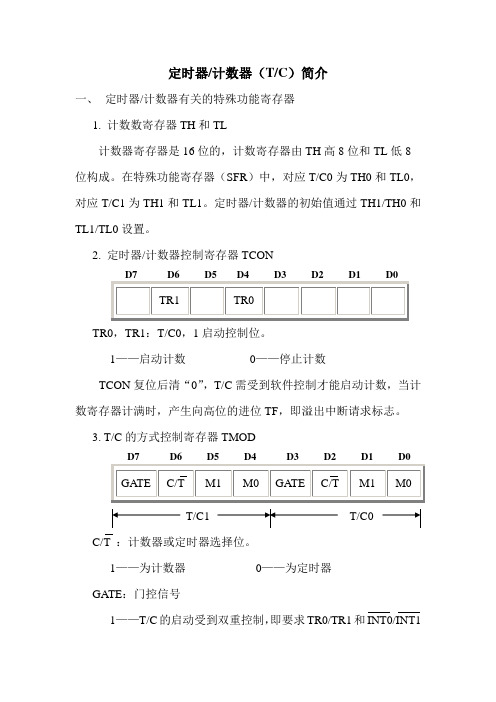
2. 定时器/计数器控制寄存器TCONTR0,TR1:T/C0,1启动控制位。
1——启动计数0——停止计数TCON复位后清“0”,T/C需受到软件控制才能启动计数,当计数寄存器计满时,产生向高位的进位TF,即溢出中断请求标志。
3. T/C的方式控制寄存器TMODT/C1 T/C0 C/T :计数器或定时器选择位。
1——为计数器0——为定时器GATE:门控信号1——T/C的启动受到双重控制,即要求TR0/TR1和INT0/INT1同时为高。
M1和M0:工作方式选择位。
(四种工作方式)4.定时器/计数器2(T/C2)控制寄存器TF2:T/C2益出标志——必须由软件清除EXF2:T/C2外部标志。
当EXEN2=1,且T2EX引脚上出现负跳变而引起捕获或重装载时置位,EXF2要靠软件来清除。
RCLK:接收时钟标志1——用定时器2 溢出脉冲作为串行口的接收时钟0——用定时器1的溢出脉冲做接收时钟。
TCLK:发送时钟标志。
1——用定时器2 溢出脉冲作为串行口的发送时钟0——用定时器1的溢出脉冲作发送时钟EXEN2:T/C2外部允许标志。
1——若定时器2未用作串行口的波特率发生器,T2EX端的负跳变引起T/C2的捕获或重装载。
0——T2EX端的外部信号不起作用。
TR2:T/C2运行控制位1——T/C2启动0——T/C2停止C/T2:计数器或定时器选择位1——计数器0——定时器CP/RL:捕获/重载标志。
1——若EXEN2=1,且T2EX端的信号负跳变时,发生捕获操作。
0——若定时器2溢出,或在EXEN2=1条件下T2EX端信号负跳变,都会造成自动重装载操作。
PLC的中断功能

PLC的中断功能PLC程序中经常用到中断功能,中断相当于子程序,子程序相当于主程序,说起来PLC里的中断平时根本没什么用。
这么说,像告诉脉冲处理,不用中断,只用1MS的计时能实现其功能,但是却没有中断计时来的精确,毕竟不用中断,程序扫瞄受扫描周期束缚。
但有些程序,必须要用到中断,典型的就是PID,检测读取周期必须精确。
不管是以前自己编PID中断程序,还是现在集成的PID中断程序块,都使用到了精确的时间控制,立即处理信息的中断。
今天这篇文章,我们就来谈谈,PLC中断功能怎么用?PLC这样理解中断功能,在理解中断时,首先要清楚PLC的运算周期或者说是扫描周期,有必要说下PLC顺控循环执行的流程,这是理解中断的前提,必须要掌握,分为三部分,输入处理、程序处理、输出处理。
1、输入处理可编程控制器在执行程序前,将可编程控制器的所有输入端子的ON/OFF状态读入输入映像区,程序执行过程中即使输入发生变化,输入映像区的内容也不会变化,在执行下一个循环的输入处理时读取该变化。
2、程序处理PLC根据程序内存中的指令内容,从输入映像区和其他软元件的映像区中读出各软元件的ON/OFF状态,然后从0步依次开始运算,并将每次得出的结果写入到映像区中。
因此,各软元件的映像区随着程序的执行逐步改变其内容,此外,输出继电器的内部触点根据输出映像区的内容而执行动作。
3、输出处理所有指令执行结束后,输出Y映像区中的,ON/OFF状态会传送至输出锁存内存,这个就作为可编程控制器的实际输出。
执行以一次动作所需要的时间就是运算周期也叫扫描时间,那么中断与扫描周期有什么联系呢,中断就是不按照从上到下顺序的完整执行,而是中断程序优先单独运行程序处理而且是立即输出不参与整个周期运算。
中断的作用是什么呢,我们知道plc扫描周期是很短的,因此我们很难看出plc顺控执行过程,这里我们不妨假设扫描周期为10s的时间,就是执行全部的程序需要10s的时间,有一个很简单的程序LD X0,OUT Y0,根据上图当X0为ON时,Y0不是马上就有输出的,而是等到10s后才输出,断开X0后,同样Y0也不是马上就关闭的,都需要得到扫描完后才有结果。
三菱忙脉冲捕捉M8177编程示例
三菱忙脉冲捕捉M8177编程示例三菱FX5UCPU模块中内置有FX3兼容脉冲捕捉功能。
根据X0~X7的输入信号的OFF→ON,特殊继电器(SM8170~SM8177)通过中断处理被设置。
通过在程序中使用该特殊继电器,可以捕捉普通的输入处理遗漏的脉冲信号。
使用FX3兼容脉冲捕捉功能时,需要通过参数进行脉冲捕捉设置及输入响应时间的设置。
此外,还配备与MELSEC Q/L系列脉冲捕捉功能同等的脉冲捕捉功能。
[要点] 脉冲捕捉功能与FX3兼容脉冲捕捉功能可以同时使用。
一、FX3兼容脉冲捕捉功能的规格FX3兼容脉冲捕捉可以使用输入X0~X7。
1、输入响应时间FX5U-32M / FX5UC-32M:X0~X5 5μs,X6~X7 100μsFX5U-64M / FX5U-80M / FX5UC-64M / FX5UC-96M:X0~X7 5μs2、输入编号与特殊继电器的分配输入编号----对应的特殊继电器X0----------SM8170X1----------SM8171X2----------SM8172X3----------SM8173X4----------SM8174X5----------SM8175X6----------SM8176X7----------SM8177二、FX3兼容脉冲捕捉功能的执行步骤FX3兼容脉冲捕捉功能的执行步骤如下所示。
1、确认FX3兼容脉冲捕捉的规格。
确认FX3兼容脉冲捕捉的输入响应时间、对应特殊继电器等规格。
2、与外部设备连接。
3、设置参数。
进行脉冲捕捉设置等参数设置。
4、创建程序。
创建使用脉冲捕捉所需的程序。
5、执行程序。
FX3兼容脉冲捕捉的参数设置通过GX Works3进行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#pragma abs_address:0xffdc
void (* const _vectab[])(void) = {
isrDummy,//Timebase
isrDummy,//ADC
isrDummy,//KBI
isrDummy,//SCI TC/TE
isrDummy,//SCI RF/IDLE
isrDummy,//SCI PE/FE/NF/OR
isrDummy,//SPI TE
isrDummy,//SPI MOD/OVR/RF
isrDummy,//TIM2 OVR
isrDummy,//TIM2 channel 1
isrDummy,//TIM2 channel 0
isrDummy,//TIM1 OVR
*[中断向量]
ORG $FFF6 ;定时器1通道0输入捕捉中断向量
DW Tim1CH0Int
ORG $FFFE ;复位向量
DW MainInit
*Tim1CH0Int:定时器1通道0输入捕捉中断子程序-------------*
*功能:定时器输入捕捉中断处理,开关拨动时指示灯PTA.1闪烁*
*入口:无*
*出口:无*
*------------------------------------------------------*
Tim1CH0Int:
LDA #%00110000
STAT1SC
;[输入捕捉模式,允许输入捕捉中断,跳变沿捕捉]
LDA #%01001100
STAT1SC0
;[允许定时器1计数寄存器计数]
BCLR 5,T1SC
CLI ;开总中断
;[主循环开始]
MainLoop:
NOP
JMP MainLoop
*[内部直接调用子程序存放处]
*[两个起始地址名]
RAMstartAddr equ $0040 ;RAM的起始地址
FlashStartAddr equ $8000 ;程序开始地址
*[指示灯定义]
Light_P equ PTA ;灯(Light)接在PTA口
Light_D equ DDRA ;相应的方向寄存器
Light_Pin equ 1 ;所在的引脚
PSHH ;保护H
;[至此,可读取计数器的值,可在此处添加用户的程序.本程
;序仅为实验例程,用指示等状态改变,说明发生了中断]
;指示灯状态变换
BRCLR Light_Pin,Light_P,Tim1CH0Int_1
BCLR Light_Pin,Light_P ;若原来灯暗,则变亮
BRA Tim1CH0Int_2
*文件名:Tim1Ch0I.prj *
*硬件接线:1:PTA.1接指示灯*
* 2:PTD.4,即定时器1通道0(21脚),接开关*
*程序描述:以输入捕捉中断方式, *
*开关拨动使捕捉中断取反指示灯PTA1,使其闪动*
*目的:学习HC08系列定时器溢出捕捉功能*
*说明:本例是将定时器1通道0(21脚)设为"跳变沿捕捉" *
实例编号:A05_2路径:\ASM\ A05_2定时器输入捕捉(Ch0main.asm)
*------------------------------------------------------*
*工程名:Tim1Ch0.ASM *
*硬件接线:1:PTA.1接指示灯*
* 2:PTD.4,即定时器1通道0(21脚)接开关*
#define Light_Pin 1 //所在的引脚
#define CH0FBit 7 //定时器1通道标志位
// vectors08.c用于定义中断矢量表
/*isrTim1Ch0I:输入捕捉中断处理函数---------------------*
*功能:当前灯的状态*
*-----------------------------------------------------*/
#define Light_Pin 1 //所在的引脚
#define CH0FBit 7 //定时器1通道标志位
/*函数声明*/
void SetTim1Ch0I(void); //定时器1和定时器1通道0初始化
void main()
{
asm("SEI"); //禁止所有中断
//[I/O初始化]
Light_D|=1<<Light_Pin; //令指示灯引脚为输出
* (即电平发生变化时产生中断),验证方法是将21脚不*
*断接高电平、低电平,此时指示灯PTA1状态跟随改变*
*---------《嵌入式应用技术基础教程》教学实例----------*/
#include "GP32C.h"
#define Light_P PTA //灯(Light)接在PTA口
#define Light_D DDRA //相应的方向寄存器
10.3.3输入捕捉中断编程实例
下面程序验证定时器1通道0(引脚21)输入捕捉中断的产生,当中断发生时取反指示灯PTA1。定时器1通道0的输入捕捉中断向量的地址是$FFF6。
(1)输入捕捉中断编程实例C语言主程序
实例编号:C05_2路径:\C\C05_2定时器输入捕捉(tim1ch0.prj)
/*-----------------------------------------------------*
Light_P|=1<<Light_Pin; //初始时,指示灯"暗"
//[定时器1和定时器1通道0初始化]
SetTim1Ch0I();
asm("CLI"); //开放中断
//[主循环开始,为空操作]
//[等待输入捕捉中断,(开关的拨动)]
while(1);
}
/*SetTim1Ch0I:定时器1和定时器1通道0初始化-------------*
*功能:初始化定时器1和定时器1通道0 *
*参数:无*
*返回:无*
*-----------------------------------------------------*/
void SetTim1Ch0I()
{
T1SC=0b00110000; //不允许溢出中断、不启动计数、分频因子=1
T1SC0=0b01001100;//允许CH0输入捕捉中断,跳变沿捕捉
isrDummy,//TIM1 channel 1
isrTim1Ch0I,//TIM1 channel 0
isrDummy,//CGM
isrDummy,//IRQ
isrDummy//SWI
/*RESET也是中断,定义在crt08.o中*/
};
#pragma end_abs_address
(3)输入捕捉中断编程实例汇编语言程序
T1SC&=~(1<<5);//允许定时器1计数寄存器计数
}
(2)输入捕捉中断编程实例C语言矢量表文件
输入捕捉中断编程C语言程序例矢量表文件(vectors08.c)
#include "GP32C.h"
/*[引脚定义]*/
#define Light_P PTA //灯(Light)接在PTA口
#define Light_D DDRA //相应的方向寄存器
Tim1CH0Int_1:
BSET Light_Pin,Light_P ;若原来灯亮,则转暗
Tim1CH0Int_2:
;清除定时器1通道0输入捕捉中断标志位
LDA T1SC0
BCLR CH0FBit,T1SC0
PULH;恢复H
RTI
*[外部子程序存放处]
$include "GP32Init.ASM"
#pragma interrupt_handler isrTim1Ch0nsigned char temp=Light_P;
temp&=1<<Light_Pin; //取得当前灯的状态
if(temp!=0) //原来指示灯"暗",则变"亮"
Light_P&=1<<Light_Pin;
CH0FBit equ 7 ;定时器1通道标志位
*======================================================*
*[主程序]
org FlashStartAddr ;程序起始地址
MainInit: ;复位后程序从此开始执行
;[系统初始化]
SEI ;关总中断
LDHX #$023F;堆栈初始化
TXS
JSR GP32Init ;调系统初始化子程序GP32Init
;[I/O初始化]
BSET Light_Pin,Light_D ;令指示灯引脚为输出
BSET Light_Pin,Light_P ;初始时,指示灯"暗"
;[定时器1通道0初始化]
;[不允许溢出中断、不启动计数、分频因子=1]
else //原来指示灯"亮",则变"暗"
Light_P|=1<<Light_Pin;
T1SC0&=~(1<<CH0FBit);//清除定时器溢出标志位
}
#pragma interrupt_handler isrDummy
void isrDummy(void)
{ }
//中断矢量表,如果需要定义其它中断函数,
*程序描述:输入捕捉中断方式,使开关拨动时指示灯PTA.1闪烁*