交流电机控制技术II
交流电机高性能转矩控制教学内容设计
磁链解耦控制特征 , 全面 阐述了交流电机中高性能转矩控 制数学模 型; 于这些模型分 析了 当前两种典 型的交流 电动机高性能转矩 控制系统 基 结构 , 最后 给出实验结果 。课堂教学结果显示 , 本文提出的教学 内容设计能够使得学 生迅速抓住交流 电机高性能转矩控制本质 , 取得了很好 的
_
18 0
电气 电子教学学报
Ke wo d : y r s AC o o ;t r u ;d s o p e m t r o q e ic u l
随着工业不断 向纵深层 次发展 , 要求交流调速 系统具有 高性 能 的转 矩控 制性 能; 国发 电量 的 我
6 ~7 用 于推动 电动 机 做 功 , 中 9 的 电动 O O 其 0 机是 交 流 电动机 [ 。所 以交 流 调速课 程 日益成 为 电 1 ]
c u s , ih i if u t osu yf rsu e t.B gn igfo t ep y ia au eo h o g e c m bnn o r e wh c sdfi l t d t d n s e i nn r m h h sc l t r f et r u , o ii g c t o n t t et r u t h h r ce itc o ic u l g,t i p p ra a y e h t e aia o e t ih h o g ewih t e c a a t rsi fds o p i n h s a e n l s s t e ma h m t lm d lwi h g - c h
中文1232 1234 1236 1238 交流控制器用户手册
- 2 -安全指南只有合格人员才允许安装和使用本产品。
合格人员是指经过培训,并按既定安全惯例和标准进行安装,调试和使用的人员。
本手册包括了保证人身安全与保护本产品应遵守的注意事项。
这些注意事项在手册中以三角形警告图标加以突出。
免责声明免责声明我们已核对过本手册的内容。
由于差错难以完全避免,我们不能保证和所描述的产品完全一致,我们会检查经常手册的内容,并在后续的编辑中进行必要的更正。
技术数据如有改动,恕不另行通知。
目录目录.............................................................................................................................................................................- 3 -1. 概述 (5)简介 (5)应用 (5)特性 (5)相关标准 (6)系统配件 (6)2. 物料搬运车 (7)3.基础 (8)控制器 (8)机械安装要求 (9)电气连接要求 (9)典型接线图 (10)A. 配840系列仪表 (10)B. 配enGage系列仪表 (11)技术规格 (12)可编程参数 (12)1311手持编程器 (13)加速器 (14)电机 (14)电池 (15)4. 检测 (16)4.1 菜单检测 (16)4.1.1 加速器输入检测 (16)4.1.2 方向输入检测 (16)4.1.3 主接触器检测 (17)4.2 万用表检测 (18)5. 调试 (19)5.1 基本参数设置 (19)5.1.1 电机参数设置 (19)5.1.2 限流参数设置 (19)5.1.3 电池参数设置 (19)5.1.4 主接触器参数设置 (20)5.1.5 电磁刹车参数设置 (20)5.1.6 加速器参数设置 (20)5.1.7 刹车加速器参数设置 (21)5.1.8 当前故障检查 (21)5.1.9 紧急方向参数设置 (22)5.1.10 互锁刹车参数设置 (22)5.1.11 控制模式参数设置 (23)5.1.12 泵电机参数设置 (23)- 3 -5.2 控制器和电机匹配 (24)5.2.1 电机匹配 (24)5.2.2 最大牵引力测试 (25)5.2.3 拐点测试 (25)5.2.4 车速设置 (25)6. 测量 (26)6.1 限流参数设置 (26)6.2 测量前期准备 (26)6.3 测量和记录 (26)附录 (27)1.参数菜单(表3) (27)2.监控菜单(表4) (43)3. 故障代码(表5) (47)4. 故障排查 (56)5. 注意事项 (57)- 4 -1. 概述简介科蒂斯1232/34/36/38电机速度控制器,通过先进的控制软件保证了电机在不同的模式下,都能平稳运行,包括全速和大扭矩状态下的再生制动,零速以及扭矩控制,专有的输入/输出端口及软件,保证了控制器对电磁制动和液压系统控制的经济性和高效率。
菲仕伺服电机使用说明书(第二版)
宁波菲仕运动控制技术有限公司宁波菲仕电机技术有限公司永磁交流伺服电机Ultract III(第二版)使用说明书目录一、概述 (3)二、规范说明 (3)三、检查 (3)四、安装 (4)五、编码器配置 (4)六、接线 (6)七、PHASE电机与驱动器接线 (10)Ⅰ、匹配PHASE驱动器接线 (10)(1)、配置正余弦编码器接线 (10)(2)、配置绝对值编码器接线 (11)(3)、配置旋转变压器接线 (12)Ⅱ、匹配LENZE驱动器接线 (13)(1)、配置旋转变压器接线 (13)(2)、配置绝对值编码器接线 (14)(3)、配置数字增量式编码器接线 (15)Ⅲ、匹配KEB驱动器接线 (16)(1)、配置正余弦编码器接线 (16)(2)、配置旋转变压器接线 (17)(3)、配置绝对值编码器接线 (18)Ⅳ、匹配SIEMENS驱动器接线 (19)(1)、配置正余弦编码器接线 (19)(2)、配置旋转变压器接线 (20)Ⅴ、匹配Schneider驱动器接线 (21)(1)、配置旋转变压器接线 (21)(2/3)、配置绝对值编码器接线 (22)Ⅵ、匹配B&R驱动器接线 (24)(1)、配置绝对值编码器接线 (24)Ⅶ、匹配CT驱动器接线 (25)(1)、配置绝对值编码器接线 (25)Ⅷ、匹配Kinwaytech(御能)驱动器接线 (26)(1)、配置旋转变压器接线 (26)Ⅸ、匹配Inovance(汇川)、Modrol(蒙德)驱动器接线 (27)(1)、配置旋转变压器接线 (27)Ⅹ、匹配Vector(威科达)驱动器接线 (28)(1)、配置数字增量式编码器 (28)八、运行与维护 (29)衷心感谢您选用菲仕伺服电机,为使本电机一直维持良好的运行状态,请将本手册随整机附送给最终用户。
虽然在您的选型过程中,可能已经对本产品有所了解并与本公司的技术人员进行了某些沟通,但为充分发挥本电机最佳功能,仍请在使用前,仔细阅读本使用说明书,必要时请与PHASE的有关人员联系,获得必要的帮助,以便正确的使用和维护电机,使之运行可靠,经久耐用。
永磁同步电机弱磁控制的控制策略研究【范本模板】

永磁同步电机弱磁控制的控制策略研究摘要永磁同步电机是数控机床、机器人控制等的主要执行元件,随着稀土永磁材料、永磁电机设计制造技术、电力电子技术、微处理器技术的不断发展和进步,永磁同步电机控制技术成为了交流电机控制技术的一个新的发展方向。
基于它的优越性,永磁同步电机获得了广泛的研究和应用.本文对永磁同步电机的弱磁控制策略进行了综述,并着重对电压极限椭圆梯度下降法弱磁控制、采用改进的超前角控制弱磁增速、内置式永磁同步电动机弱磁控制方面进行了调查、研究。
关键词:永磁同步电机、弱磁控制、电压极限椭圆梯度下降法、超前角控制、内置式永磁同步电动机一、永磁同步电机弱磁控制研究现状1.永磁同步电机及其控制技术的发展任何电机的电磁转矩都是由主磁场和电枢磁场相互作用产生的。
直流电机的主磁场和电枢磁场在空间互差90°电角度,因此可以独立调节;而交流电机的主磁场和电枢磁场互不垂直,互相影响。
因此,交流电机的转矩控制性能不佳。
经过长期的研究,目前交流电机的控制方案有:矢量控制、恒压频比控制、直接转矩控制等[1]。
1.1 矢量控制1971年德国西门子公司F.Blaschke等与美国P.C.Custman等几乎同时提出了交流电机磁场定向控制的原理,经过不断的研究与实践,形成了现在获得广泛应用的矢量控制系统。
矢量控制系统是通过坐标变换,把交流电机在按照磁链定向的旋转坐标系上等效成直流电机,从而模仿直流电机进行控制,使交流电机的调速性能达到或超过直流电机的性能。
1.2 恒压频比控制恒压频比控制是一种开环控制,它根据系统的给定,利用空间矢量脉宽调制转化为期望的输出进行控制,使电机以一定的转速运转。
但是它依据电机的稳态模型,从而得不到理想的动态控制性能。
要获得很高的动态性能,必须依据电机的动态数学模型,永磁同步电机的动态数学模型是非线性、多变量,它含有角速度与电流或的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。
电机控制技术-课件

1.2 电力传动系统运动方程
1.2.1 运动方程 一. 单轴电力拖动系统的运动方程
研究运动方程,以电动机的轴为研究对象,电动机 运行时的轴受力如图示。
电力拖动系统正方向的规定:先规定转速n的正方 向,然后规定电磁转矩的正方向与n的正方向相同, 规定负载转矩的正方向与n的正方向相反。
生产机械转矩分为:摩擦阻力产生的和重力 作用产生的。
(3)恒功率负载:负载转矩与转速成反比。 (4)粘滞摩擦负载:负载转矩与转速成正比。
1.4 电力传动系统的机械特性
第 电动机机械特性:电动机的转速与转矩的关系。
一 电动机四象限运行状态:正向电动状态、反向电
章 动状态,正向制动状态、反向制动状态。
电动机固有机械特性: 电动机人为机械特性:
第II象限 第I象限 正向制动 正向电动
变压器
变电站
楼宇
照明 B
高压输电线
制冷 小型发电机 变压器
M
电力系统简单结构图
H/C 加 热
工厂
1.1 电力传动系统的发展
第 电力传动系统:以电动机为动力源,驱动各种设 一 备及电器的系统,以 完成一定的生产任务。 章 目前,电能的三分之二用于电力传动系统。
电力传动系统的基本结构:
概
述
电源
指令 控制设备
电动机 传动机构 生产机械
1.1 电力传动系统的发展
第 电力传动系统分类: 一 (1)按控制类型:调速系统、位置随动系统。调 章 速系统又分为直流调速和交流调速。
(2)按电动机类型:直流传动系统、交流传动 系统。
概 (3)按机组形式:单台传动系统、多机传动系 述 统。
(4)按运动方式:单向运转不可逆、双向运转 可逆传动系统 (5)按用途形式:主传动系统、辅助传动系统
第五章 交流-交流变换技术
5.2 单相交流调压电路
工作波形示意
特点:
感性负载电流滞后,电 压过零点附近,电感电 流方向与电压方向反向, 此时开关组的切换也造 成电流的断续。因此, 为防止过电压还需要采 取其他措施,如使用缓 冲电路、电压电流过零 检测等,这是互补控制 方式的不足之处。
5.2 单相交流调压电路
常用控制模式
电压同步。 Y连接时三相中至少要有两相导通才能构成电流通路,因
此单窄脉冲是无法启动三相交流调压电路的。为保证起始 工作电流的流通,触发信号应采用大于/3的宽脉冲(或 脉冲列),或采用间隔/3的双窄脉冲。
工 作 波 形 分 析
30o
5.3 三相交流调压电路
PWM斩控三相交流调压电路
sin( ) sin( )e tan
的情况:
负载电流只有稳态分量i1,导通角 ,π电流连续。在这种状态下,
电感续流结束时刻正好是下一个控制脉冲到来的时刻,负载电流 处于临界连续状态,负载电压是完整的正弦波( )u,o 而u负i 载
电流则是一个滞后于电压 角的纯 正弦波,电路无调压作用。
(2)负载电流有效值:
I or ms
Uorms R
Urms R
sin2 π
2π
π
负载电流等于交流电源电流
5.2 单相交流调压电路
(3)流过晶闸管的电流平均值和有效值:
IVTrms
1π (
2Urms sint )2 d(t ) Urms
2π
R
R
sin2 π
5.3 三相交流调压电路
三相交流调压电路常见结构
5.3 三相交流调压电路
SVPWM控制技术-课件PPT

六拍阶梯波逆变器输出的各电压波形 如前所示。
如果定义电压空间矢量 U s 为:
为何有此 定义?
U s2 3(U U N U V N ej2 3 U W N ej4 3)
则根据前述六拍阶梯波工作模式下的6种工作状态, 可以分别推导得出6个电压空间矢量: Us1, Us2, Us3, Us4, Us5和Us6; Us7和Us8幅值为零,称为零电压矢量,简称零矢量
6-11
主电路原理图简化表示
Ud 2
N′
Ud 2
SU
SV SW
功率开关器件共 有 23 = 8 种,组合 工作状态
IM N
交流电机
三相逆变器-异步电动机 变频调速系统主电路原理图(二)
6-12
逆变器的 8 种工作状态
① 100
② 110
③ 010
④ 011
⑤ 001
⑥ 101
⑦ 000
⑧ 111
6-33
主电路原理图简化表示
Ud 2
N′
Ud 2
功率开关器件共 有 23 = 8 种,组合 工作状态
V1
U
V3 V5
V W
IM N
V4 V6 V2 交流电机
三相逆变器-异步电动机 变频调速系统主电路原理图
6-34
每个周期的六边形合成电压空间矢量
在180o导电模式下的
U4
六拍阶梯波作用下,
U3
随着逆变器工作状态
2 3
)
计算:
j2
j4
uaube3 uce3
6-26
j2
j4
ua ub e 3 uc e 3
Um
cost
Um
cos(t
交流励磁双馈发电机模型的建立与控制

( ) 子 电流 的频 率 等 于 滑 差 频 率 ; 1转 ( ) 了 实 现 d q 变 量 之 间 的解 耦 , 用 定 子 磁 2为 , 轴 采 场 定 向 , 转 的 坐 标 轴 d轴 与 定 子 磁 链 相 重 合 。 因 旋 为 q轴 超 前 d轴 9 。则 有 : 0,
U = 言( + f一 +, 一 A 1 1 f )
其 中:
一
时 .对发 电机输 出有功功率和无功功 率的控 制都较容
易 实 现 , 且 可 以实 现 独 立 调 节 。 面分 析 采 用 矢 量 控 而 下 制方法达到双馈发电机有功无功的解耦控制 。 以 d Ⅱ 系 变 量 表 示 的发 电机 定 子 侧 的 有 功 功 率 一 轴 P和 无 功 功 率 Q为 :
( 转第 2 下 4页 )
0
将式 ( 1代人式 ( ) : 1) 7有
以进一 步参 照兄弟 院校应用 C I D O模式 的作法 。如文 献[ 中在教 学 中搭建 的项 目实践管 理平 台 , 3 】 对学 生实 践过程 开展科学 、 规范 化的过程 管理 , 包括 知识管 理 、
q
d = L i + L d
,
,
i ,
() 3
0
0
唧墓 { , ∞
j O dOr
:
g
L i
g,
+ L
,
f
g,
其中:
“ 口j 加. 加-_]
:
3 双 馈 发 电机 的 矢 量解 耦 控 制
采 用矢 量 控 制 可 以简 化 电 机 内部 各 变 量 间 的 藕 合 关 系 , 化 了控 制 。 简 通 过 控 制 转 子 的交 流 励 磁 电 压来 控 制 转 子 电 流 是 本 文 对 交 流 励 磁 发 电机 的控 制 思 路 .控 制 转 子 电 流 使
维修电工技术等级标准

维修电工技术等级标准一、职业定义使用电工工具和仪器仪表,对设备电气部分(含机电一体化)进行安装、调试、维修。
二、适用范围各种机床、工艺设备和电气设备的维修、安装;各种交直流电动机、变压器和各种电器的大、中、小修。
三、技术等级线初、中、高三级。
初级维修电工一、知识要求1、常用仪表(兆欧表、万用表、电流表、电压表、转速表等)的名称、型号、规格、用途、使用规则和维护保养方法。
2、常用工具和量具(手电钻、喷灯、拆卸器、验电笔、旋具、钢丝钳、剥线钳、电工刀、电烙铁、游标卡尺、千分表、万能角尺、塞尺、绕线机等)的名称、规格、用途、使用规则和维护保养方法。
3、常用各种电工材料(导电材料、绝缘材料、磁性材料、电碳制器、绝缘漆和电工材料等)的名称、规格和用途。
4、晶体二极管、三极管的识别方法和简单放大电路的工作大原理。
5、机械识图知识。
常用电气设备的图形符号和项目代号,常用电气图的系统图、电路图、接线图和有关文字说明方面的知识。
6、交、直流电路的基本知识,一般电路的计算公式和计算方法。
7、电动机和电器铭牌数据的意义。
8、常用变压器、电机(交、直流)、低压电器的名称、种类、构造、工作原理和用途。
9、各种电磁铁和电磁离合器的吸力、电流及行程的相互关系和调整方法。
10、中、小型交流电动机和变压器绕组分类的基本知识。
11、常用轴承和润滑脂的类别、牌号及使用范围。
12、绘制电动机下线接线图和辨别定子2、4、6、8 极单路和双路接线的知识。
13、各类熔断器的名称、规格和使用规则。
14、三相交流异步电动机(包括绕线式转子异步电动机)的启、制动原理及常用的控制方法。
15、中、小型异步电动机的拆装、绕线、接线、包扎、干燥、浸漆和轴承装配等工艺规程及试车注意事项。
16、接地线的种类、作用及装接方法。
17、常用设备电器的一般常识,安全用电知识。
18、钳工基本知识。
19、安全技术操作规程。
二、技能要求:1、测量导线的线径,计算导线截面。
永磁交流直线电机直接驱动伺服控制技术
装 使 用 多 个工 作 台 :
l9 9 3年 9月 德 国 E x—C l—O公 司 于汉 诺 威 欧 洲 机 el
( )速 度 高 , 达 6 1 可 0~2 0 Vm n 0 n i;
( )惯性 小 , 速 度 特性 好 , 达 l 2 , 于高 速 精 2 加 可 ~g易
定位 ;
w rd, n h e in me h d fl e r mo os a d i ii ld — o l a d t e d sg t o s o i a tr n t d g t i n s a
r c rv e v o t l r i p o o e . e t ie s ro c nr l s r p s d d oe Ke wo d :i e rmo o ; ih s e d ma h n n ; e v o t l y r s ln a t r hg p e c i i g s r o c n r o
促进 了直线 电机直接驱动技 术在高速加工 中心 中的应 用。文 章分析 了高速 加工与直 线 电机 的关 系 , 以及 国 内外 的直线 电
机及其伺 服控制 技术 的发展 状况 , 出了直 线 电机及 其 全数 提
字化直接驱动伺 服控制器 的设计 方法 。 关键词 : 直线 电机 ; 高速加工 ; 伺服控 制
S I h n , , A GXi H og一 W N a Z n—k iC E D n j,I hn yn u , H N ig- iL U C eg— ig
( s g a n es y B in 0 0 4 C ia T i h nU i r t, e ig10 8 , hn ) n v i j
电机矢量控制按转子磁链定向的参数辨识方法

0 引言
向角 都是 参加 运算 的数值 量 , 但是 在实 际 中这两个 量都 是
【( ( )02 _9) _- 1 寺‘
( 4 )
很难 测量 的 ,所 以存矢 量控 制系 统 中采用 检测 交流 电机 的定 子 电压 、 电流 及转速 等容 易得 到 的物理 量 ,利用 转子 状态 观测 器 来计 算转 子磁 链模 和空 间位 置 。但是 状态 观测 器估 计 的方法 需 要得 到 己知 电机 的多项 参数 ,估 计需假 设状 态 的初 始条 件 ,估
,_‘ j
电机 矢 量 控 制按 转 子 磁 链 定 向的参 数 辨 识 方 法
王 帅 ,韩 兵
摘
~ 一
建 立 了新 的 电机 旋 转 变 换 参 数模 型 。由 于这 个 模 型 包含 了磁 链 定 向的 参 数 信 息 , 用 该模 型 进行 参 数辨 识 过计 算可 以得 到 固 定 的磁 利 通
M ir c m putrAp i a i s o.8 N .,02 co o e plc t n V 1 , o 2 1 o 2 2
—
—
技术 交流
微 型 电脑 应 用
21 年第 2 02 8卷 第 2 期
一
文 章 编 号 : 1 0 .5 X(0220 6 —3 0 77 7 2 1 ).0 20
计误 差较 大存 在 确 定 性 。为 了得到 矢量控 制 系统 按转 子磁链 定 向的方法 ,可 以考 虑 采用 参数 辨识 ,并根 据 同步 旋转变 换 实
现 磁链 定 向 。
L J 圭: doi t- l L l J L l
,
㈤
.
l 笋 一 怯 。m ] r u 1 得 丸. 荽 0 斟‘
SVPWM控制技术及其应用
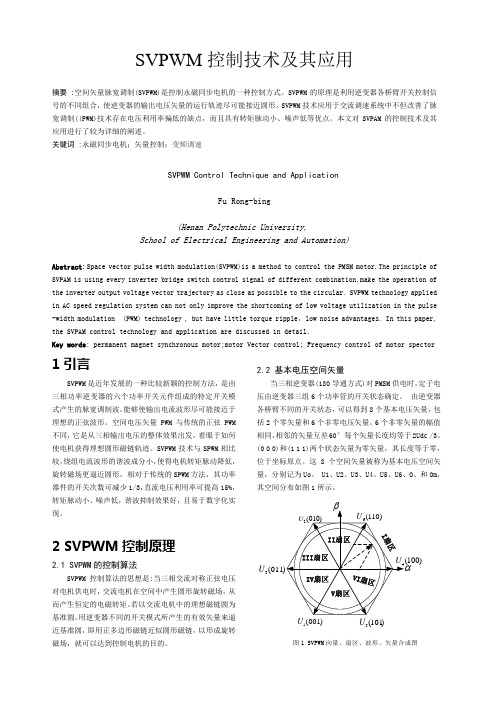
SVPWM控制技术及其应用摘要 :空间矢量脉宽调制(SVPWM)是控制永磁同步电机的一种控制方式。
SVPWM的原理是利用逆变器各桥臂开关控制信号的不同组合,使逆变器的输出电压矢量的运行轨迹尽可能接近圆形。
SVPWM技术应用于交流调速系统中不但改善了脉宽调制((PWM)技术存在电压利用率偏低的缺点,而且具有转矩脉动小、噪声低等优点。
本文对SVPAM的控制技术及其应用进行了较为详细的阐述。
关键词 :永磁同步电机;矢量控制;变频调速SVPWM Control Technique and ApplicationFu Rong-bing(Henan Polytechnic University,School of Electrical Engineering and Automation)Abstract: Space vector pulse width modulation(SVPWM)is a method to control the PMSM motor.The principle of SVPAM is using every inverter bridge switch control signal of different combination,make the operation of the inverter output voltage vector trajectory as close as possible to the circular. SVPWM technology applied in AC speed regulation system can not only improve the shortcoming of low voltage utilization in the pulse -width modulation (PWM) technology , but have little torque ripple,low noise advantages. In this paper, the SVPAM control technology and application are discussed in detail.Key words: permanent magnet synchronous motor;motor Vector control; Frequency control of motor spector1引言SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
东北大学继续教育学院
交流电机控制技术II 试卷(作业考核线上2)A 卷(共6 页)
一、判断题(20分)正确用√表示,错误用X表示,请将判断结果填入各题的()中:
1. 间接变频装置的中间直流环节采用大电感滤波的属于电压源变频装置。
(X)
2. 恒磁通变频调速协调控制原则是U/f为常数(√)
3. 异步电动机矢量控制中,MT坐标系的电磁量是直流量。
(√)
4. 在矢量控制中以转子a轴为参考轴的坐标系是dq坐标系。
(X)
5. 在SPWM的正弦参考信号中加入3次谐波后,可以拓宽线性控制范围(X)
6. 交-交变频器的最大输出频率是50Hz。
(X)
7. 规则采样法的采样区间是等宽的(√)
8. 串联二极管的电流型逆变器换流中的尖峰电压与负载漏抗有关(√)
9. 在选择逆变器的开关器件时,可以不考虑元件承受反压的时间。
(X)
10. 交直交变频器是直接变频器。
(√)
11.按照VT1~VT6顺序导通逆变器主开关为三相异步电动机提供变频电源,ABC三相的下桥臂开关编号分别是VT2、VT3、VT6。
(X)
12.变频调速时,在基频以下通常采用恒磁通变频调速,其协调控制原则为U/f等于常数。
(X)
等于常数。
(√)
13.恒功率变频调速,其协调控制原则为
14.基频以下调速时为了维持最大转矩恒定,在频率较低时应适当提高转子电压。
(X)
15.变频器按变换的环节分为交—交变频器和交—直—交变频器。
(√)
16.变频器按直流环节储能元件不同分为电流型变频器和电压型变频器。
(√)
17.矢量控制理论中涉及的三个主要坐标系分别是ABC 、αβ 和 MT ;其中ABC和αβ
是静止坐标系。
( X )
18.通过坐标变换将定子电流分解为两个相互独立的量,其中为1T i 磁场分量; 1M i 为转矩分量,可以实现解耦控制。
( X )
19.在矢量控制理论中将三相坐标系下的三个时间变量写成2[()()()]A A B C x k x t ax t a x t =++形式的空间矢量,是以任意x 轴为参考轴的空间矢量表达式。
( X )
20.三相坐标系下,空间矢量a A j x x e θ-=是以转子a 轴为参考轴的空间矢量表达式。
( X )
二、选择题(20分)请将正确答案填入各题的()中: 1. 变频技术中智能功率模块的英文缩写是( B ) A .PIC B. IPM C. SPWM D. GTR
2.基频以下变频调速时为了维持最大转矩恒定,在较低频率时应适当提高( B )。
A.定子电流 B.定子电压 C. 电源频率 D. 电机转速
3. 由D 触发器构建的环形分配器,如果在任意时刻都有三个Q 端输出1,则可得到宽( B )的六路脉冲输出。
A.120°
B. 180°
C. 150°
D. 不确定
4. 对变频器调速系统的调试工作应遵循先( A )的一般规律。
A 、先空载、后轻载、再重载 B 、先轻载、后空载、再重载 C 、先重载、后轻载、再空载 D 、先轻载、后重载、再空载
5. 180°导电型的三相桥式逆变电路的换流是在( C )之间进行的。
A. 相邻相的上桥臂或者下桥臂 B. 相邻相的上下桥臂 C. 同一相的上下桥臂 D. 不确定桥臂
6. 电流型变频器带异步电动机在电动状态下运行时,变频器的逆变器处于( B )状态。
A. 空载 B.逆变 C.截止 D.无法确定
7.变频调速系统控制单元通过( B )得到控制脉冲的高低电平。
A. 锁相环 B. 比较器 C. 函数发生器 D. 极性鉴别器
8. 磁场轨迹法采用相邻电压矢量作为辅助矢量,在主矢量u(561)转换为主矢量u(612)以前,采用( A )作为辅助矢量。
9. 交交变频器工作时,正、反两组变流器交替工作。
如果输出电压电流相位差大于90°,说明电动机工作在( B )状态。
A. 电动
B. 制动
C.空载
D.额定
10. 在变频调速中,若在额定频率以上调时,当频率上调时,电压( C )。
A、上调
B、下降
C、不变
D、不一定
四、作图题(30分)
1.标出下图中的异步调制区间和分级同步调制区间,并标明恒转矩调速和恒功率调速区
间。
(7分)
解:
2.画出180°导电型三相逆变器输出电压波形(设负载Y接,以中性点O为电位参考点)。
(7分)
解:
3.电流型逆变器变频调速系统为异步电动机供电,在电动状态下运行。
试定性画出逆变器
波形。
(7分)
入口处电压u
d
解:
4.根据单相全桥单极性控制信号定性画出输出电压u
o 电流i
o
的波形图。
(提示:负载功率
因数0.8)(9分)
解:
五、分析判断(20分)
1. 异步电动机SPWM变频调速系统原理框图如下,根据其控制原理将给定序号填入对应的单元。
(如:给定积分器填数字7)(10分)
①绝对值运算器;②三角波发生器;③比较器;④压控振荡器;⑤三相正弦波发生器;⑥函数发生器;
⑦给定积分器;⑧极性鉴别器;⑨倍频器;⑩输出电路。
解:
2. 按运算电路矩阵公式,画出矢量回转器VD 的运算电路框图。
111111cos sin sin cos m t i i i i αβθθθθ-⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(10分)
解:
六、简述题(10分) 1. 什么是PWM 技术?(5分)
答:(1)对逆变电路开关器件的通断进行控制,(2)用输出端宽度不等的脉冲获得正弦波形。
2. 从直流滤波环节、输出电压波形、输出电流波形3个方面,比较电压型变频器和电流型变频器的区别。
(5分)
答:1.对逆变电路开关器件的通断进行控制,2.用输出端宽度不等的脉冲获得正弦波形。
1.电容器、电抗器;2.方波、正弦波;3.与负载有关、方波。