他励直流电动机的机械特性
他励直流电动机的机械特性(精)

反之,如果电网电压波动使机械特性偏低,由曲线1转为曲 线3,则瞬间工作点将转到 B 点,电磁转矩小于负载转矩, 转速将由 B点降低到 C 点,在 C 点取得新的平衡;而当 扰动消失后,工作点将又恢复到原工作点A。这种情况我们就 称为系统在A点能稳定运行,而图2.16(b)则是一种不稳定运 行的情况,读者可自己分析。 由以上分析,可得出如下结论:若两条特性曲线有交点 (必要条件),且在工作点上满足 dTem dTL (2-11) <
dn dn
(充分条件)则系统能稳定运行,式(211 )即为稳定运行条件。对恒转矩负载 , 则 dT / dn 0即电磁转矩的变化与转速 的变化要异号,图示则为电动机的机械特性 曲线应是往下倾斜的。显然在图2.16(b) dTL / dn 0 dT / dn 0 中的A点, ,因此不 能稳定运行。
图2.14 他励直流电动机改 变电枢电压时的机械特性
3.减弱磁通时的人为机械特性 可以在励磁回路内串接电 阻R pf或降低励磁电压U f 来减弱 R pa 0 特 磁通,此时 U U N , 性方程式为; UN Ra (2-10) n T 2 em Ce CeCT
由于磁通 的减少,使 得理想空载转速 n 0 和斜率 都增大,其特性曲线如图2.15 所图示。
2.3.1
机械特性方程式
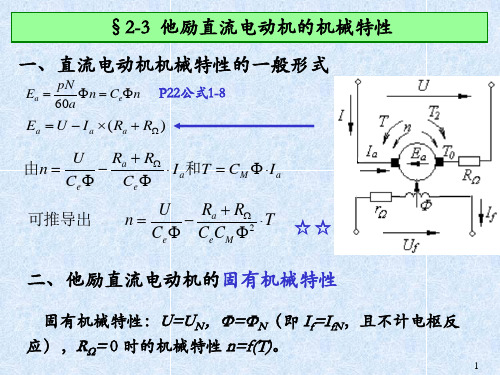
图 2.11 是他励直流电动机的 电路原理图,他励直流电动机的 机械特性方程式,可由他励直流 电动机的基本方程式导出。由式 U Ea I a Ra 、 E a C e n 和 式 Tem CT I a 可求得机械特性方 程式;
←
U R n T C C C
U n C
0 e
图2.12 他励直流电动机的机械特性
他励直流电动机的机械特性
他励直流电动机额定数据为:PN=29kW,UN=440V, IN =76.2A,nN=1050rpm,Ra=0.393。电动机拖动额定恒转距
负载工作,试计算:
(1)额定电压和额定励磁时,电枢串入2.5 电阻时的转速。
(2)额定励磁不串电阻时,电压U=220V时的转速。
(3)额定电压不串电阻时,磁通减少15%时的转速。
注意:他励(或并励)电 动机在运行时,励磁绕组绝对
不能断开。否则, If=0,电枢
电流迅速增大;若负载较小,
则会造成“飞车”事故。
例2-2 P43
0
TN
T
2
§2-3 他励直流电动机的机械特性
三、他励直流电动机的人为机械特性
1、电枢回路串电阻时的人为机械特性
n
UN Ce N
Ra R CeCM N
(4)额定电压、电枢串入2.5 电阻,并将磁通减少15%时
的转速。
解:
CeΦN
UN
IaN Ra nN
440
76.2 0.393 1050
0.3905
6
§2-3 他励直流电动机的机械特性
(1) Ia IaN 76.2 A
n U N (Ra RΩ )Ia 440 76.2 (0.393 2.5) 562 .3rpm
CeΦN
0.3905
(2) Ia IaN 76.2 A
n U Ra Ia 220 76.2 0.393 486 .7rpm
CeΦN
0.3905
(3) 由于: T CeΦN IaN CeΦI a 所以:
Ia
CeΦN IaN CeΦ
CeΦN IaN 0.85 CeΦN
89.65 A
CeΦ
他励直流电动机的机械特性

一.能耗制动 1.他励电动机能耗制动电路图及电路特点 1.他励电动机能耗制动电路图及电路特点
他励电动机能耗制动电路原理( 他励电动机能耗制动电路原理(图9-18)
能耗制动时的机械特性为:
Ra + R B Tem = 0 − β Tem 2 C eCT Φ N
n=−
n
制动瞬间 工作点
电动机状态工 作点
启动时电枢电流过渡过程( 启动时电枢电流过渡过程(图9-12)
(7)结论 请看下表: 可以看出: 理论上,只有当时间 n 趋于无穷 时,转速才能达到稳态值 ,但实 际上,由于当 t =(3 ~ 4)TtM 时 ,系统转速已达到稳定运行转速 nz 的 95% ~ 98% 所以,一般可认为经过 3 ~ 4 个 时间常数,转速便达到稳定值, 过渡过程结束
任意给出两点如 T = 0(空载点)和 T = TN通过这两点得连线即为固有机 械特性 (二)人为机械特性的绘制 二 人为机械特性的绘制 各种人为机械特性的计算较为简单,把相应的参数值代入对应的人为机械 特性方程式即可。
四.电力拖动系统稳定运行的条件
我们的任务是什么? 分析生产机械负载转矩特性与电动机的机械特性的配合问题 1.稳态时电动机电流由负载大小决定 1.稳态时电动机电流由负载大小决定 (1)转矩平衡 当他励电动机机械特性 n = f(T)为 3,恒转矩负载特性 n = f(TZ)为 1 因转矩 T 与 TZ 方向相反、大小相等而相互平衡 时,转速为某一稳定值,拖动系统处于稳态 (2)稳态运行 两个特性的交点 A ,转速都是 nA,电磁转矩 等于负载转矩(= TZ1) 交点A表明电力拖动系统的某一稳态运行点 (3)负载发生变化 如负载增大,负载转矩特性由 1 变为 2 。 转速开始时仍为 nA,电磁转矩 T 还是由 A 点决定,因为 T = TZ1< TZ2 所以 dn/dt < 0 ,系统进入动态减速过程 两种不同负载的n= 31,2—两种不同负载的n=f(TZ) 3- n=f(T) 两种不同负载的
他励直流电动机的机械特性
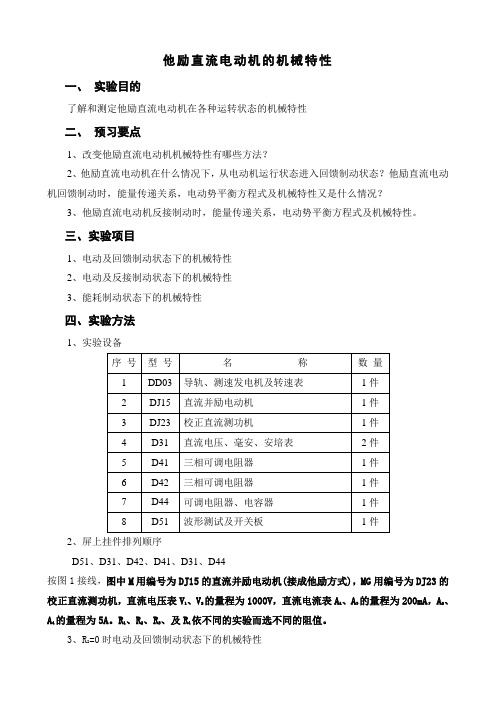
他励直流电动机的机械特性一、实验目的了解和测定他励直流电动机在各种运转状态的机械特性二、预习要点1、改变他励直流电动机机械特性有哪些方法?2、他励直流电动机在什么情况下,从电动机运行状态进入回馈制动状态?他励直流电动机回馈制动时,能量传递关系,电动势平衡方程式及机械特性又是什么情况?3、他励直流电动机反接制动时,能量传递关系,电动势平衡方程式及机械特性。
三、实验项目1、电动及回馈制动状态下的机械特性2、电动及反接制动状态下的机械特性3、能耗制动状态下的机械特性四、实验方法1、实验设备2、屏上挂件排列顺序D51、D31、D42、D41、D31、D44按图1接线,图中M用编号为DJ15的直流并励电动机(接成他励方式),MG用编号为DJ23的校正直流测功机,直流电压表V1、V2的量程为1000V,直流电流表A1、A3的量程为200mA,A2、A4的量程为5A。
R1、R2、R3、及R4依不同的实验而选不同的阻值。
3、R2=0时电动及回馈制动状态下的机械特性(1) R 1、R 2分别选用D44的1800Ω和180Ω阻值,R 3选用D42上4 只900Ω串联共3600Ω阻值,R 4 选用D42上1800Ω再加上D41上6只90Ω串联共2340Ω阻值。
(2) R 1阻值置最小位置,R 2、R 3及R 4阻值置最大位置,转速表置正向1800r/min 量程。
开关S 1、S 2选用D51挂箱上的对应开关,并将S 1合向1电源端,S 2合向2'短接端。
(3) 开机时需检查控制屏下方左、右两边的“励磁电源”开关及“电枢电源”开关都须在断开的位置,然后按次序先开启控制屏上的“电源总开关”,再按下“开”按钮,随后接通“励磁电源”开关,最后检查R 2阻值确在最大位置时接通“电枢电源”开关,使他励直流电动机M 起动运转。
调节“电枢电源”电压为 220V ;调节R 2阻值至零位置,调节R 3阻值,使电流表A 3为100mA 。
第三章 直流电动机的电力拖动
U
Ec R1
两级起动时
I1 R2 R1 I 2 R1 Ra
推广到m级起动的一般情况
I1 Rm Rm1 R2 R1
I 2 Rm1 Rm2
R1 Ra
I1 / I2 称为起动电流比
30
R1 Ra
R2 R1 Ra 2
Rm1
Rm 2
Ra
m1
Rm Rm1 Ra m
17
B、风机与泵类负载的转矩特性
通风机负载转矩与转速的大小有关,基本上与转速的平方成正比
特点: TL Kn2
通风机类负载的转矩特性
如实际生产机械中的水泵、油泵、离心式通风机等其介质 对叶片的阻力基本上与转速的平方成正比。
18
C、恒功率负载的转矩特性
特点:
TL
k
1 n
恒功率负载的转矩特性
在不同转速下,负载转矩基本上与转速成反比,其功率基本
恒转矩负载 大多数生产机械可归纳为: 风机与泵类负载
恒功率负载
14
各类生产机械的负载转矩特性 A、恒转矩负载的转矩特性
特点: 负载转矩不受转速变化的影响。在任何转速下,负载转矩
总是保持恒定或大致恒定。
反抗性恒转矩负载 恒转矩负载
位能性恒转矩负载
15
(1) 反抗性恒转矩负载的转矩特性如下图所示。
反抗性恒转矩负载的转矩特性
22000 Ω
0.174Ω
Ce N
UN
I N Ra nN
220 116 0.174 V/(r/min) 1500
0.133 V/(r/min)
理想空载点 Te 0
n
n0
UN
Ce N
220 r/min 1650r/min 0.133
他励直流电机的机械特性

他励直流电机的固有机械特性
转速特性:他励直流电动机的转速特性整理后得到 2N
T e S a N e N C C R R C U n Φ+-Φ=
(3-1)
图3-2 直流电机的工作原理图
忽略电枢反应的去磁效应,转速与负载电流按照线性关系变化,负载电流增加时,转速会下降。
转矩特性:当N U U =,fN I I =时,)(a em I f T =的关系叫转矩特性。
根据直流电机电磁转矩的公式
a N T em I C T Φ=
(3-2)
由此公式得出,忽略电枢反应情况下电磁转矩与电枢电流成正比,考虑电枢反应主磁通的下降,电磁转矩上升的速度比电流上升的速度要慢一些,曲线的斜率也会有下降。
效率特性 :当N U U =,N I I f =时,)(a I f =η的关系较效率特性。
a
N a a I U I R P P P P P P 2021211+-=∑+∑-==η (3-3)
空载损耗
P是不随负载变化的,负载电流较小时效率较低,输入的功
率大部分消耗在空载损耗上;负载电流增大效率也会增大,输入的功率大部分消耗在机械的负载上,但当负载电流增大到一定的时候铜损快速增大,此时的效率开始变小。
他励直流电动机的机械特性

他励直流电动机的机械特性
他励直流电动机的机械特性他励电机属于直流电机,是指电机的励磁线圈和电枢绕组是分开的电机,励磁电流单独提供,与电枢电流无关。
他励电动机的励磁绕组和电枢绕组分别由两个电源供电。
他励电动机由于采用单独的励磁电源,设备较复杂。
但这种电动机调运范围很宽,多用于主机拖动中。
1、固有机械特性
固有机械特性是当电动机的电枢工作电压和励磁磁通均为额定值,电枢电路中没有串入附加电阻时的机械特性,其方程式为;
固有机械特性曲线如右上图所示,由于电枢电阻Ra比较小,则?n也比较小,所以他励直流电动机的固有机械特性是比较“硬”的。
2、人为机械特性
人为机械特性是人为地改变电动机回路参数或电枢电压而得到的机械特性,即改变公式(2-4)中的参数所获得的机械特性,一般只改变电压、磁通、附加电阻中的一个,他励电动机有下列三种人为机械特性。
(1)电枢回路串电阻时的人为机械特性
保持U =UN ,Φ=ΦN ,R =Ra+Rpa,电枢回路串电阻人为机械特性的方程式为;
与固有特性相比,理想的空载转速不变,但转速降?n增大,特性变“软”,当Rpa越大,?n也越大,特性越“软”,如图中曲线1,2所示。
这类人为机械特性是一组通过n0但具有不同斜率的直线。
他励直流电动机串电阻时的机械特性
从图上可见,当负载转矩TL不变时,只改变电阻Rpa的大小,可以改变电动机的转速,例如TL=TN,电枢回路串电阻Rpa=0,转速na,当Rpa=Rpa1,转速nb,Rpa=Rpa2,转速nc,因此,电枢回路串电阻的方法,可用于他励直流电动机调速。
(2)改变电枢端电压时的人为机械特性。
直流电动机机械特性

(二)他励直流电动机的机械特性
他励直流电动机电路原理图
002em em e e T U R n T n T n n C C C βφφ
=-=-=-∆ 机械特性曲线:当U 、R 、φ为常数时,他励直流电动机的机械特性是一条以β为斜率向下倾斜的直线,如图所示。
图2-14他励直流电动机的机械特性
机械特性的硬度: β越大,特性越陡,称为软特性;
β越小,特性越平,称为硬特性;
表明机械特性曲线的下垂程度。
1、他励直流电动机的固有机械特性
当N U U =,N φφ=,a R R =()0s R =时的机械特性称为固有机械特性。
其方程式为 2N a em e N e T N
U R n T C C C φφ=
-, 2、人为机械特性
1)电枢串电阻时的人为机械特性
保持N U U =,N φφ=不变,只在电枢回路串入电阻s R 的人为特性。
他励直流电动机的机械特性

四、 人为机械特性
R R p a N 固有机械特性:n U M 2 C e N
人为机械特性可用改变电动机参数的方 法获得,即机械特性三个变量中任有一个 或一个以上值非额定时得到的机械特性即 为人为机械特性。 (U,Φ,Rad)
C C e t N
1. 串联电阻时的人为机械特性
此时增加了Rad:U=UN,Φ =Φ N,R=Ra+ Rad 电枢串联电阻Rad时,人为机械特性的方程式 U R R N a ad 为:n T n n
2 K K eN K e t N 0
当U和Φ 都是额定值时,理想空载转速不变, 转速降增加,特性变软。 Rad越大,特性越软 。
特点和机械特性图
特点
人为机械特性由交纵 坐标轴于一点,但具 有不同斜率的射线族 组成。
机械特性图
电枢串联电阻时的人 为机械特性
2. 改变电压时的人为机械特性
特性曲线图
因为,当n=0时, I=Ist=U/Ra=常数, 所以,Tst=KtΦ Ist 随Φ 的降低而减小,而 n0随Φ 的降低而增大。 改变磁通Φ 的人为特性 曲线图如右图。
注意
根据固有机械特性估算数据
根据固有机械特性可估算以下数据: 电枢电阻Ra:通常电机在额定负载下的铜耗 I2aRa占总损耗ΣΔPN的50%~75%。因 ΣΔPN=输入功率-输出功率 =UNIN-PN =UNIN-ηN UNIN =(1-ηN )UNIN 即 Δ P铜= I2aRa=(0.5~0.75)(1-ηN )UNIN 式中, ηN = PN/(UNIN) 是额定运行条件下电 动机的效率,且此时Ia=IN
T N
TN是电动机轴上的输出转矩, 电磁转矩
9 .55 n N
他励直流电动机的人为机械特性设计

他励直流电动机的人为机械特性(串电阻)一.直流电机基本工作原理与结构直流电机是指能输出直流电流的发电机,或通入直流电流而产生机械运动的电动机。
直流电动机具有良好的起动性能和宽广平滑的调速特性,因而被广泛应用于电力机车、无轨电车、轧钢机、机床和起动设备等需要经常起动并调速的电气传动装置中。
直流发电机主要作直流电源。
此外,小容量直流电机大多在这种控制系统中以伺服电动机、测速发电机等形式作为测量、执行元件使用。
1.直流电动机的工作原理图1.直流电动机工作原理若把上述电机模型作为直流电动机模型,如图2所示,由外电源由电刷A引入直流电源,使电流从正极电刷A流入,由负极电刷B流出。
此时,线圈中电流的路径:电源正极——电刷A——a——b——c——d——电刷B——电源负极。
根据左手定则确定的电磁方向可知,此时的电磁转矩是逆时针的。
设电枢在电磁转矩的作用下按逆时针方向旋转,当线圈边ab由N极下面转到S极下面,线圈边cd由S极下面到N极下面时,由于换向器的作用,使线圈中的电流改变方向,此时电流的路径:电源正极——电刷——d——c——b——a——电刷B——电源负极。
因为各磁极下线圈中的电流方向并不改变,所以就保证了电磁转矩的方向不变,从而使电枢能够连续旋转。
2.直流电机的基本结构(1)直流电机的静止部分1、主磁极2、机座3、换向极4、电刷装置(2)直流电机的转动部分1、电枢铁心2、电枢绕组.3、换向器.图2.电枢铁芯直流电机的额定值直流电机的额定数据有:1、额定功率 P N(瓦/千瓦,W/KW)2、额定电压 U N(伏V)3、额定电流 I N(安A)4、额定转速 n N (转/分 r/min)5、额定励磁电压 U Fn(伏V)6、额定励磁电流 I fN(安A)二、他励直流电动机的工作特性直流电动机的工作特性是指:在U1=UN,If=IfN的条件下,电枢回路无外接电阻时,转速n和转矩Tem以及效率与输出功率之间的关系。
他励直流电动机的机械特性曲线的分析

浅析:他励直流电动机的机械特性在电源电压U 和励磁电路的电阻R f 为常数的条件下,表示电动机的转矩n 和转矩之间的关系n=f (T )曲线,称为机械特性曲线。
利用机械特性和负载转矩特性可以确定拖动系统的稳定转速,在一定条件下还可以利用机械特性和运动方程式分析拖动系统的动态运动情况,如转速、转矩及电流随时间的变化规律。
可见,电动机的机械特性对分析电力拖动系统的启动、调速、制动等运行性能是十分重要的。
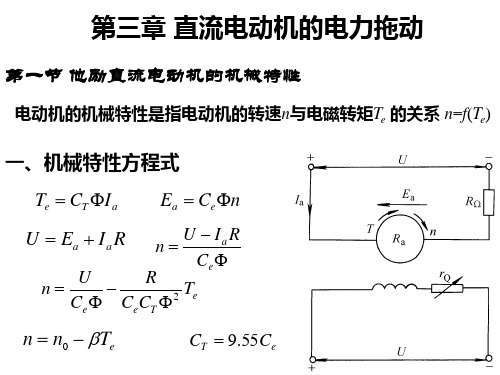
下图是他励直流电动机的电路原理图,他励直流电动机的机械特性方程式,可由他励直流电动机的基本方程式导出。
由公式 , 和 导出机械特性方程式 ( 1-1 )他励直流电动机电路原理图当电源电压U =常数,电枢回路总电阻R =常数,励磁磁通F =常数时,电动机的机械特性如下图所示,是一条向下倾斜的直线,这说明加大电动机的负载,会使转速下降。
特性 曲线与纵轴的交点为n 0时的转速,称为理想空载转速。
他励直流电动机的机械特性a a a R I E U+=n E a Φe C =φa T em I C T =emT R U n 2T e e C C C ΦΦ-=Φe 0C U n =实际上,当电动机旋转时,不论有无负载,总存在有一定的空载损耗和相应的空载转矩,而电动机的实际空载转速 将低于n0。
由此可见式(1-1)的右边第二项即表示电动机带负载后的转速降,用 表示,则 ( 1-2 ) 式中 β——机械特性曲线的斜率。
β越大, 越大,机械特性就越“软”,通常称b 大的机械特性为软特性。
一般他励电动机在电枢没有外接电阻时,机械特性都比较“硬”。
机械特性的硬度也可用额定转速调整率△n N%来说明,转速调整率小,则机械特性硬度就高。
电动机的机械特性分为固有机械特性和人为机械特性 。
他励直流电动机特性实验报告

实验报告他励直流电动机的机械特性一、实验原理1、当在他励直流电动机上加上一定电压U和一定的励磁电流时,电磁转矩与转速之间将呈现的关系。
而励磁电压,励磁转矩T=。
可得。
这便是直流他励电动机机械特性的一般表达式。
实验中可以先不串电阻R,测量出励磁电流和相应转速n的一系列对应值,作图得出的空载转矩,并得出和的值。
串入R后得出T的另外对应值,作图得出的他励直流电动机的机械特性曲线2、学习电机实验的基本要求与安全操作注意事项。
3、认识在直流电机实验中所用的电机、仪表、变阻器等组件及使用方法。
4、熟悉他励电动机的接线、起动、改变电机转向与调速的方法。
5、掌握用实验方法测取直流他励电动机的工作特性和机械特性。
二、实验注意事项1、实验时,人体不可接触带电线路。
2、接线或拆线都必须在切断电源的情况下进行。
3、学生独立完成接线或改接线路后必须经指导教师检查和允许,并使组内其他同学引起注意后方可接通电源。
实验中如发生事故,应立即切断电源,经查清问题和妥善处理故障后,才能继续进行实验。
4、电机如直接起动则应先检查功率表及电流表的电流量程是否符合要求,有否短路回路存在,以免损坏仪表或电源。
5、总电源或实验台控制屏上的电源接通应由实验指导人员来控制,其他人只能由指导人员允许后方可操作,不得自行合闸。
6、在做直流电动机实验时,要注意开/关机顺序先开“直流电机励磁电源”,后开“可调直流稳压电源”先关“可调直流稳压电源”,后关“直流电机励磁电源”三、实验安全要求1、实验时,人体不可接触带电线路。
2、接线或拆线都必须在切断电源的情况下进行。
3、学生独立完成接线或改接线路后必须经指导教师检查和允许,并使组内其他同学引起注意后方可接通电源。
实验中如发生事故,应立即切断电源,经查清问题和妥善处理故障后,才能继续进行实验。
4、电机如直接起动则应先检查功率表及电流表的电流量程是否符合要求,有否短路回路存在,以免损坏仪表或电源。
5、总电源或实验台控制屏上的电源接通应由实验指导人员来控制,其他人只能由指导人员允许后方可操作,不得自行合闸。
直流他励电动机的机械特性测定
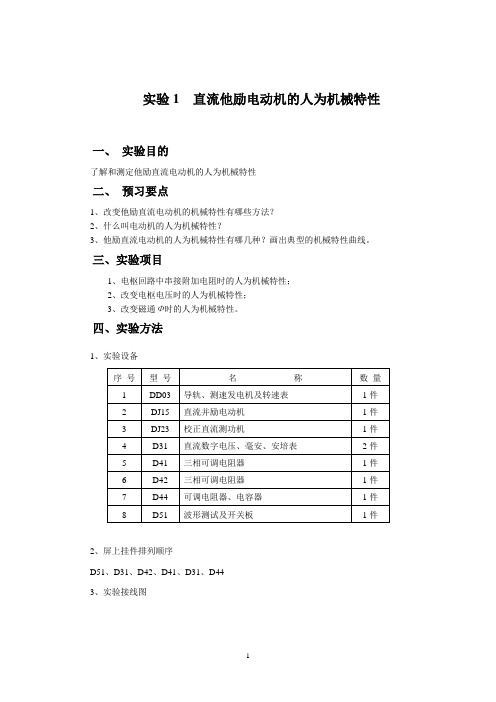
实验1 直流他励电动机的人为机械特性一、实验目的了解和测定他励直流电动机的人为机械特性二、预习要点1、改变他励直流电动机的机械特性有哪些方法?2、什么叫电动机的人为机械特性?3、他励直流电动机的人为机械特性有哪几种?画出典型的机械特性曲线。
三、实验项目1、电枢回路中串接附加电阻时的人为机械特性;2、改变电枢电压时的人为机械特性;3、改变磁通Ф时的人为机械特性。
四、实验方法1、实验设备2、屏上挂件排列顺序D51、D31、D42、D41、D31、D443、实验接线图1'励磁电源电枢电源图 1 他励直流电动机人为机械特性测定的实验接线图按图1接线,其中(1) M 用编号为DJ15的直流并励电动机(接成他励方式); (2) MG 用编号为DJ23的校正直流测功机; (3) 直流电压表V1、V2的量程为1000V ; (4) 直流电流表A1、A3的量程为200mA ; (5) 直流电流表A2、A4的量程为5A ;(6) 可调电阻R1选用D44上的1800Ω加上180Ω串联共1980Ω阻值; (7) 可调电阻R2选用D42上的900Ω并联900Ω共450Ω阻值;(8) 可调电阻R3选用D42上的1800Ω加上D41上的180Ω共1980Ω阻值; (9) 可调电阻R4选用D42上的1800Ω加上D41上的4个90Ω串联共2160Ω; (10) 开关S1、S2选用D51上的双刀双掷开关。
4、电枢回路中串接附加电阻时的人为机械特性测定 操作步骤:(1) 可调电阻的设定:R1阻值置最小位置,R2、R3及R4阻值置最大位置,转速表置正向1800r/min 量程。
(2)开关S 1、S 2选用D51挂箱上的对应开关,并将S 1合向1电源端接通电枢电源,S 2合向2'短接端(见图1)。
(3) 开机时必须检查的事项:➢控制屏下方左、右两边的“励磁电源”开关及“电枢电源”开关都须在断开的位置;➢R1阻值置最小位置,R2、R3及R4阻值置最大位置。
他励直流电动机机械特性的测定实验报告

实验一他励直流电动机机械特性的测定一.实验目的1.掌握用实验方法测取他励直流电动机的工作特性和机械特性。
2.掌握他励直流电动机的调速方法。
二.预习要点1.什么是直流电动机的工作特性和机械特性?2.直流电动机调速原理是什么?三.实验设备及仪器1.SMCL电力电子及电气传动教学实验台的主控制屏。
2.电机导轨及涡流测功机、转矩转速测量(NMEL-13F)。
3.可调直流稳压电源(含直流电压、电流、毫安表)。
4.直流电压、毫安、安培表(NMEL-06)。
5. 直流励磁及电源(NMEL-18A)。
6.他励直流电动机M03。
7.开关板(NMEL-05B)。
8.三相可调电阻900Ω(NMEL-03)。
四.实验内容1.学习起动直流电动机。
2.测定他励直流电动机固有机械特性。
3.测定改变电源电压及串电阻的人为机械特性。
五.实验方法1 . 他励直流电动机固有机械特性的测定M03为他励直流电动机U N=220V,I N=1.1A,n N=1600r/min,P N=185W;励磁电压U f=220V,励磁电流I f≤0.080A。
直流电压表V为220V可调直流稳压电源自带;直流电流表mA1、A1分别为220V可调直流稳压电源自带毫安表、安倍表;按图1-1接线,在开启电源前,检查开关、电阻等的设置。
实验步骤:(1)R2电阻位于NMEL-09中间电阻,顺时针调到底(最小);(2)R1电阻位于NMEL-04最上面电阻,逆时针调到底(最大);(3)R4电阻位于NMEL -03最上面电阻,逆时针调到底(最大); (4)NMEL-05B 开关S 1合向“1”端(5)按下绿色“闭合”电源开关按钮(左下方主电源开关); (6)调节电压调节电位器,使电压输出显示(V )显示220V ; (7)按下NMEL-18复位按钮,电机起动后将R1顺时针调至底;(8)调节NMEL -09上中间励磁电阻,使转速显示为1500转,读取电枢电流,转速(n=1500n/min );(9)在不串电阻的情况下,调节测功机“转速转矩给定”,使电枢电流在额定内的变化,读取8组数据:(Ia=0.1,0.15,0.2,0.25,0.3,0.35,0.4,0.45)记录电流I a ,转速n ,转矩T 2;(10)保持U=U N ,I f =I fN 不变的条件下,逐次减小电动机的负载,即逆时针调节“转矩设定”电位器,测取电动机电枢电流I a 、转速n 和转矩T 2,共取数据8组填入表1-1中。
2.3他励直流电动机的机械特性

β 越大,∆n 越大,机械特 性就越“软”,β 越小, ∆n 越
式中 β ——机械特性曲线的斜率。
小,机械特性就越“硬”。 一般他励直流电动机的电枢 没有外接电阻,Ra 比较小, β 也比较小,则机械特性就比较 “硬”。
2.3.2 固有机械特性和人为机械特性
电动机的机械特性可分为固有机械特性和人为机械特性 1.固有机械特性 固有机械特性是指当电动机的电 枢工作电压和励磁磁通均为额定值、 电枢回路中没有串入附加电阻时的 机械特性,其方程式为; U Ra (2-7) n= N − Tem 2 CeΦ N CeCTΦ N 固有机械特性曲线如图2.13所 示,由于 Ra 较小,则 ∆ n 也较小, 所以他励直流电动机的固有机械特 性是比较“硬”的。
2.3 他励直流电动机的机械特性
他励直流电动机的机械特性是指电动机在电枢电压、 励磁电流、电枢回路总电阻为恒值时,电动机在稳定运 Tem 行状态下,电动机的转速n与电磁转矩 之间的关系, n = f ( T em ,或者说电动机的转速n 与电枢电流 ) 即 Ia n = f (,后者也就是转速调整特性。由于转 Ia ) 的关系 速和转矩都是机械量,所以把它称为机械特性。利用机 械特性和负载转矩特性,可以确定电动机在拖动系统的 稳定转速,在一定条件下还可以利用机械特性和运动方 程式来分析拖动系统的动态运动情况,如转速、转矩及 电流随时间的变化规律,而且电动机的机械特性对分析 电力拖动系统的启动、调速、制动等运行性能也是十分 重要的。
Ra T 2 em Ce CTΦ N
(3)改变磁通时的人为机械特性 可以在励磁回路中串接上电 阻 R pf ,或降低励磁电压 U f 来减弱 磁通,保持 U = U N , pa = 0 时, R 减弱磁通的人为特性方程式为; UN Ra n= − T 2 em CeΦ CeCTΦ (2-10) 由于磁通Φ 的减少,使得理 想空载转速 n0 和机械特性斜率β 都增大,其特性曲线如图2.15所 图示。电机的磁通设计在磁化曲 线的膝点,接近饱和点,因此一 般采用减弱磁通方法,可见,当 负载转矩不变时,减弱磁通方法 也可用于他励直流电动机调速。
第九章 第一节 机械特性方程

他励直流电动机 的机械特性
负载特性
负载特性
两种特性有交点仅是稳定运行的必要条件。稳定运行的充分条件是: 如果电力拖动系统原在交点处稳定运行,由于出现某种干扰作用 (如电网电压波动、负载转矩的微小变化等),使原来两种特性的 平衡变成不平衡,电动机转速便稍有变化,这时,当干扰消除后, 拖动系统必须有能力使转速恢复到原来交点处的数值。电力拖动系 统如能满足这样的特性配合条件,则该系统是稳定的,否则是不稳 定的。
U N 220V
I N 116A
nN 1500 / min r
试计算其机械特性。 解
2 U N I N PN 2 220116 22000 Ra Ω 0.174Ω 2 2 3 3 IN 116
U N I N Ra 220 116 0.174 Ce N V/(r/min) 0.133V/(r/min) nN 1500 220 UN 理想空载点 T 0 n n0 r/min 1650 r/min Ce N 0.133
n0 n0
电动机带负载后的转速降
R Δn T T 2 CeCT
n0 nN nN % 100ቤተ መጻሕፍቲ ባይዱ nN
1 转速和负载的关系?
n
U R T 2 Ce CeCT
2 在n0点上,负载的情况如何?
n
U R T 2 Ce CeCT
2 在n0点上,负载的情况如何?
1.转速和负载的关系? 2. 在n0点上,负载的情况如何? 3. 如何改变n0 点的位置? 4.实际中空载转速的情况如何? 5.如何评价机械特性的好坏? 6.为什么最后一段的机械特性曲 线会上翘?
理想空载转速
U n0 Ce
他励直流电动机的机械特性

减小,β 增大,n0增大
线
反之称为软
图
特性
1、他励电动机的固有机械特性
U=UN、Φ=ΦN, Rpa=0的机械特性称固有机械特性
n UN CeΦN
Ra CeCT ΦN2
恒转矩负载
不
特性在A点 的斜率:
系统 电压
稳 定
dn/dTL=∞, 则dTL/dn=0
波动 机特
运 行
下斜的机械特性在
上翘的机械特性在
A点其dn/dT<0,则 dT/dn<0,在A点满 足dT/dn<dTL/dn
A点其dn/dT>0,则 dT/dn>0,在A点不 满足dT/dn<dTL/dn
结论:下斜的机械特性与恒转矩负载配合, 系统能够稳定运行; 上翘的机械特性与恒转矩负载配合, 系统不能稳定运行。
斜率β越小, 下斜的机械特性在A点其dn/dT<0,则dT/dn<0,在A点满足dT/dn<dTL/dn
机 斜率β越小,特性越平,称为硬特性。
特性越平, 电力拖动系统的稳定运行,是指在某种外界因素(如电网电压波动或负载的微小变化)的扰动下,系统离开原来的平衡状态,达到新的平衡状态;
的 机械特 (3)改变磁通的人为机械特性
《电机与辅助控制系统》课程
知识点 他励直流电动机的机械特性
直流电动机的机械特性就是指在稳定运行情 况下,电动机的转速与电磁转矩之间的关系,即
n=f(T)。机械特性是电动机的主要特性,是分析
电动机起动、调速、制动等问题的重要工具。下 面以他励直流电动机为例讨论机械特性。
3他励直流电动机的机械特性

n02
ΦN
Tem TK2 TK1 TK 6
他励直流电动机的机械特性
三、机械特性的求取
1、固有机械特性(已知:PN ,U N , I N , nN 求两点:1)理想空载点: 求两点: 理想空载点:
)
(Tem = 0, n = n0)
UN Ra n= − Tem Ce Φ N CeCT Φ 2 N
2、人为机械特性
当改变 U 或
R a或 Φ得到的机械特性称为人为机械特性
3
他励直流电动机的机械特性
1)电枢串电阻时的人为特性
保持 U = U N , Φ = ΦN不变,只在电枢回路中串入电 阻 RS的人为特性: n
n0 UN Ra + R S n= − Tem 2 C e Φ N C e CT Φ N
4)计算额定工作点: N = CT Φ N I N , n = nN T
8
1 2 U N I N − PN Ra = ( ~ ) 2 2 3 IN
他励直流电动机的机械特性
2、人为机械特性的求取 在固有机械特性方程 n = n 0 − β Tem 的基础上,根据人为特性所对应的参 数 R S 或 U 或 Φ 变化,重新计算 n o 和 β ,然后得(0 , n 0 )、(T N , n )。
2)额定运行点: 额定运行点:
(Tem = TN , n = nN )
7
他励直流电动机的机械特性
步骤:
1)估算 R : a
U N I N − PN 2)计算 CeΦN 和CT ΦN : CeΦN = nN CT Φ N = 9.55CeΦ N UN 3)计算理想空载点: em = 0, n0 = T CeΦ N
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
他励直流电动机的机械特性
一、实验目的
了解和测定他励直流电动机在各种运转状态的机械特性
二、预习要点
1、改变他励直流电动机机械特性有哪些方法?
2、他励直流电动机在什么情况下,从电动机运行状态进入回馈制动状态?他励直流电动机回馈制动时,能量传递关系,电动势平衡方程式及机械特性又是什么情况?
3、他励直流电动机反接制动时,能量传递关系,电动势平衡方程式及机械特性。
三、实验项目
1、电动及回馈制动状态下的机械特性
2、电动及反接制动状态下的机械特性
3、能耗制动状态下的机械特性
四、实验方法
1、实验设备
2、屏上挂件排列顺序
D51、D31、D42、D41、D31、D44
按图1接线,图中M用编号为DJ15的直流并励电动机(接成他励方式),MG用编号为DJ23的校正直流测功机,直流电压表V1、V2的量程为1000V,直流电流表A1、A3的量程为200mA,A2、A4的量程为5A。
R1、R2、R3、及R4依不同的实验而选不同的阻值。
3、R2=0时电动及回馈制动状态下的机械特性
(1) R 1、R 2分别选用D44的1800Ω和180Ω阻
值,R 3选用D42上4 只900
Ω串联共3600Ω阻值,R 4 选用D42上1800Ω再加上D41上6只90Ω串联共2340Ω阻值。
(2) R 1阻值置最小位置,R 2、R 3及R 4阻值置最大位置,转速表置正向1800r/min 量程。
开关S 1、S 2选用D51挂箱上的对应开关,并将S 1合向1电源端,S 2合向2'短接端。
(3) 开机时需检查控制屏下方左、右两边的“励磁电源”开关及“电枢电源”开关都须在断开的位置,然后按次序先开启控制屏上的“电源总开关”,再按下“开”按钮,随后接通“励磁电源”开关,最后检查R 2阻值确在最大位置时接通“电枢电源”开关,使他励直流电动机M 起动运转。
调节“电枢电源”电压为 220V ;调节R 2阻值至零位置,调节R 3阻值,使电流表A 3为100mA 。
(4) 调节电动机M 的磁场调节电阻R 1阻值,和电机MG 的负载电阻R 4阻值(先调节D42上1800Ω阻值,调至最小后应用导线短接)。
使电动机M 的n=n N =1600r/min ,I N =I f +I a =1.2A 。
此时他励直流电动机的励磁电流I f 为额定励磁电流I fN 。
保持U=U N =220V ,I f =I fN ,A 3表为100mA 。
增大R 4阻值,直至空载(拆掉开关S 2的2'上的短接线),测取电动机M 在额定负载至空载范围的n 、I a ,共取8-9组数据记录于表1中。
(5) 在确定S 2上短接线仍拆掉的情况下,把R 4调至零值位置(其中D42上1800Ω阻值调至零值后用导线短接),再减小R 3阻值,使MG 的空载电压与电枢电源电压值接近相等 (在开关S 2两端测),并且极性相同,把开关S 2合向1'端。
(6) 保持电枢电源电压U=U N =220V ,I f =I fN ,调节R 3阻值,使阻值增加,电动机转速升高,当A 2表的电流值为0A 时,此时电动机转速为理想空载转速(此时转速表量程应打向正向3600r/min 档),继续增加R 3阻值,使电动机进入第二象限回馈制动状态运行直至转速约为1900 r/min ,测取M 的n 、I a 。
共取8~9组数据记录于表2中。
电枢电源
图 1他励直流电动机机械特性测定的实验接线图
(7) 停机(先关断“电枢电源”开关,再关断“励磁电源”开关,并将开关S2合向到2'端)。
表1 U N=220V I fN= mA
表2 U N=220V I fN= mA
3、R2=400Ω时的电动运行及反接制动状态下的机械特性
(1) 在确保断电条件下,改接图1,R1阻值不变,R2用D42的900Ω与900Ω并联并用万用表调定在400Ω,R3用D44的180Ω阻值,R4用D42上1800Ω阻值加上D41上6只90Ω电阻串联共2340Ω阻值。
(2)转速表n置正向1800r/min量程,S1合向1端,S2合向2'端( 短接线仍拆掉),把电机MG电枢的二个插头对调,R1、R3置最小值,R2置400Ω阻值, R4置最大值。
(3) 先接通“励磁电源”,再接通“电枢电源”,使电动机M 起动运转,在S2两端测量测功机MG的空载电压是否和“电枢电源”的电压极性相反,若极性相反,检查R4阻值确在最大位置时可把S2合向1'端。
(4) 保持电动机的“电枢电源”电压U=U N=220V,I f=I fN不变,逐渐减小R4阻值(先减小D44上1800Ω阻值,调至零值后用导线短接),使电机减速直至为零。
把转速表的正、反开关打在反向位置,继续减小R4阻值,使电动机进入“反向”旋转,转速在反方向上逐渐上升,此时电动机工作于电势反接制动状态运行,直至电动机M的I a=I aN,测取电动机在1、4象限的n、I a共取12~13 组数据记录于表3中。
(5) 停机( 必须记住先关断“电枢电源”而后关断“励磁电源”的次序,并随手将S2合向到2'端)。
表3 U N=220V I fN= mA R2=400Ω
4、能耗制动状态下的机械特性
(1)图1中,R1阻值不变,R2用D44的180Ω固定阻值,R3用D42的1800Ω可调电阻,R4阻值
不变。
(2) S1合向2短接端,R1置最大位置,R3置最小值位置,R4调定180Ω阻值,S2合向1'端。
(3) 先接通“励磁电源”,再接通“电枢电源”,使校正直流测功机MG起动运转,调节“电枢电源”电压为220V,调节R1使电动机M的I f=I fN,调节R3使电机M G励磁电流为100mA,先减少R4阻值使电机M的能耗制动电流I a=0.8I aN, 然后逐次增加R4阻值,其间测取M的I a、n共取8-9组数据记录于表4中。
(4) 把R2调定在90Ω阻值,重复上述实验操作步骤(2)、(3),测取M的I a、n共取5-7组数据记录于表5中。
表4 R2=180ΩI fN= mA
表5 R2=90ΩI fN= mA
五、实验报告
根据实验数据,绘制他励直流电动机运行在第一、第二、第四象限的电动和制动状态及能耗制动状态下的机械特性n=f(I a)(在同一座标系中绘出)。
当忽略不变损耗时,可近似认为电动机轴上的输出转矩等于电动机的电磁转矩T=C MΦI a,他励电动机在磁通Φ不变的情况下,其机械特性可以由曲线n=f(I a)来描述。
六、思考题
1、回馈制动实验中,如何判别电动机运行在理想空载点?
2、直流电动机从第一象限运行到第二象限转子旋转方向不变,试问电磁转矩的方向是否也不变?为什么?
3、直流电动机从第一象限运行到第四象限,其转向反了,而电磁转矩方向不变,为什么?作为负载的MG,从第一象限到第四象限其电磁转矩方向是否改变?为什么?。