75kHz声学多普勒流速剖面仪(ADCP)技术规格书20140322
声学多普勒流速剖面仪ADCP及其在水文测流中的应用

声学多普勒流速剖面仪ADCP及其在水文测流中的应用蓝标;曲娟【摘要】This paper describes flow measurement principle of ADCP (Acoustic Doppler Current Profiler).Compared with the regular hydrometric propeller,the characteristics and measurement process for ADCP flow measurement are introduced.The possible emerging problems in flow measurement of ADCP are summarized,and some attention matters are pointed out.%本文阐述了声学多普勒流速剖面仪ADCP的流量测量原理,并通过对ADCP流量测量仪与常规流速仪的比较,说明了ADCP流量测量的特点及其测量过程,并对ADCP流量测量中可能出现的问题进行了总结归纳,指出了应用中应注意的问题。
【期刊名称】《气象水文海洋仪器》【年(卷),期】2011(028)004【总页数】5页(P65-68,73)【关键词】ADCP;测流;应用【作者】蓝标;曲娟【作者单位】深圳市水务局防洪设施管理处,深圳518000;长春气象仪器研究所,长春130012【正文语种】中文【中图分类】TH7660 概述在河流水文测验工作中,流速和流量的测量是两项很重要的工作,过去,一般都采用单点式流速仪(如机械式流速仪、电接式流速仪等)逐一的对各条测流垂线进行点流速测量,然后根据流速面积法换算出整个断面的流量,这种测验方法其测量精度虽然能够满足水文测验规范的要求[1],但历时时间长,工作强度大,是其很大的弊端。
美国RDI公司研制的一种先进的测流仪——声学多普勒测流剖面仪,对于水文测验工作来说,则在很大程度上改变了流量测验的方法,实现了测流技术革命性的突破,将在河流水文测验工作中会获得更广泛的应用。
多普勒流速剖面仪(ADCP)与流速仪法流量对比分析
多普勒流速剖面仪(ADCP)与流速仪法流量对比分析摘要:随着时代的发展,水文仪器已进入高科技时代,ADCP即多普勒流速剖面仪是目前测量江河流量的最高端产品,但任何仪器设备都不是万能的,对于操作者来说将提出更高的要求。
本文通过与流速仪法对比分析,总结出了利用两种不同的方法所存在的差异,对于同行业使用ADCP测流具有一定的参考价值。
关键词:ADCP 流速仪对比分析1 情况简介松花江(六)站是松花江控制站,也是国家重要水文站。
该站位于吉林省德惠市松花江镇,设立于1923年1月,最初站名为松花江铁桥;1933年11月更改站名为松花江; 1966年6月经过几次迁移,最后为目前的松花江(六)水文站,集水面积51500km2。
畅流期采用牵船索人工摆舵船上测流。
该站ADCP于2008年就已经配置到位,近几年来一直在进行对比及操作训练,目前该站人员已经能够对ADCP进行熟练操作和使用,对比数据经计算分析合理可靠,具备投入使用的条件。
ADCP是利用多普勒效应原理进行流速测量。
ADCP因其原理的优越性,突破传统机械转动为基础的传感流速仪,用声波换能器作传感器,换能器发射声脉冲波,声脉冲波通过水体中不均匀分布的泥沙颗粒、浮游生物等反散射体反散射,由换能器接收信号,经测定多普勒频移而测算出流速。
ADCP具有能直接测出断面的流速剖面、具有不扰动流场、测验历时短、测速范围大等特点。
目前被广泛用于海洋、河口的流场结构调查、流速和流量测验等。
与传统的人工船测,桥测,缆道测量,和涉水测量的基本原理一样:在测流断面上布设多条垂线,在每条垂线处测量水深并测量多点的流速从而得到垂线平均流速,但ADCP所测的垂线可以很多,每条垂线上的测点也很多。
2 对比分析的目的通过对比ADCP测流与常规流速仪测流数据,分析之间存在差异的原因,可以尽量减少由于操作不当产生的误差,以便ADCP在本站更好地投入应用。
同时还可以解决本站由于偏角测量引起的流量改正等一系列问题。
声学多普勒流速剖面仪-最新国标
声学多普勒流速剖面仪1 范围本标准规定了声学多普勒流速剖面仪产品的类型和组成、要求、试验方法、检验规则,以及标志、包装、运输、贮存。
本标准适用于声学多普勒流速剖面仪(简称流速剖面仪)的设计、生产和使用。
2 规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T2828.1-2012 计数抽样检验程序第1部分:按接收质量限(AQL)检索的逐批检验抽样计划GB/T 10250-2007 船舶电气与电子设备的电磁兼容性GB/T 13972-2010 海洋水文仪器通用技术条件GB 18523-2001水文仪器安全要求GB/T 32065.2-2015 海洋仪器环境试验方法第2部分:低温试验GB/T 32065.3-2015 海洋仪器环境试验方法第3部分:低温贮存试验GB/T 32065.4-2015 海洋仪器环境试验方法第4部分:高温试验GB/T 32065.5-2015 海洋仪器环境试验方法第5部分:高温贮存试验GB/T 32065.6-2015 海洋仪器环境试验方法第6部分:恒定湿热试验GB/T 32065.11-2021 海洋仪器环境试验方法第11部分:冲击与碰撞试验GB/T 32065.14-2019 海洋仪器环境试验方法第14部分:振动试验GB/T 32065.15-2019 海洋仪器环境试验方法第15部分:水压试验HY/T 042-2015海洋仪器设备分类、代码与型号命名JJG 763-2019温盐深测量仪检定规程3 术语和定义下列术语和定义适用于本文件。
3.1声学多普勒速剖面仪 acoustic doppler current profiler利用声学多普勒原理,测量分层水介质散射信号的频移信息,并利用失量合成方法获取海流垂直剖面水流速度的水声仪器。
声学多普勒流速剖面仪(ADCP)的应用实例
声学多普勒流速剖面仪(ADCP)的应用实例声学多普勒流速剖面仪(ADCP)是一种融合了多学科技术而研制的新型测速声呐设备,作为水声技术的一个典型应用,作为一种测速仪器,ADCP在水运工程(包括内河和海洋工程)中得到了广泛应用,对于声学多普勒测流技术的研究日益受到人们的关注。
目前测流仪器种类繁多, 按照工作原理的不同可以分为机械式海流计、压力式海流计、电磁式海流计以及声学海流计等。
现在大量运用的是声学多普勒海流计。
声学多普勒海流计采用声遥测方式,对被测流场无干扰,能够获得高精度的速度信息,被国际海委会定为4种先进的海洋观测仪器之一,因此ADCP成为当前广泛采用的测流仪器,是水资源调查中必不可少的重要测验设备。
通过ADCP在具体工程中的应用研究,归纳总结了ADCP在工程应用中的主要工作流程,以及在工程应用中的注意事项。
一、ADCP工作原理(一)多普勒效应波源和观察者有相对运动时,观察者接收到波的频率与波源发出的频率并不相同的现象;如果二者相互接近,观察者接收到的频率增大;如果二者远离,观察者接收到的频率减小。
这便是著名的多普勒效应(奥地利物理学家及数学家克里斯琴·约翰·多普勒于1842年首先提出这一理论),它不仅适用于声波,同样适用于所有类型的波,包括电磁波。
ADCP就是利用声波的多普勒效应发展起来的一种新型测流设备,它是一种既可测量相对水底速度,同时又可以兼顾测量相对水流速度的声呐设备。
ADCP利用声学多普勒原理,测量分层水介质散射信号的频移信息,并利用矢量合成方法获取海流垂直剖面水流速度,即水流的垂直剖面分布。
对被测验流场不产生任何扰动,也不存在机械惯性和机械磨损,能一次测得一个剖面上若干层的流速的三维分量和绝对方向。
(二)ADCP测流原理水体中存在大量的散射体,诸如微小粒子、浮游生物等,它们随水体流动。
这些散射体和水体是融为一体的,其速度即代表水流速度。
当ADCP向水体中发射声波脉冲信号,被水体中悬浮的、随水体运动的散射体后产生反射,ADCP再对回波信号进行接收和处理。
ADCP介绍及使用方法
ADCP介绍及常用使用方法ADCP全称为Acoustic Doppler Current Profilers,即声学多普勒流速剖面仪,是二十世纪八十年代初发展起来的一种新型测流设备。
它与传统机械转动为基础的传感流速于不同,其采用声波换能器作为传感器,换能器发射生脉冲波,生脉冲波通过水体中不均匀分布的泥沙颗粒、浮游生物等反射,由换能器接收信号,经测定多普勒频率而测算出流速。
ADCP具有能直接测出断面的流速剖面、具有不扰动流场、测验历史短、测速范围大等特点。
ADCP的测量原理与传统的测量基本原理一样:在测流断面上布设多条垂线,在每条垂线处测量水深并测量多点的流速从而得到垂线平均流速。
它与传统方法的不同之处在于:传统流速仪法是静态方法,流速仪是固定的;而ADCP则是动态方法,它在随测量船运动过程中进行测验。
传统流速仪法要求测流断面垂直于河岸;而ADCP方法不要求测流断面垂直于河岸,测船航行的轨迹可以使斜线或曲线。
ADCP所测的垂线(子断面)可以很多,每天垂线上的测点也很多。
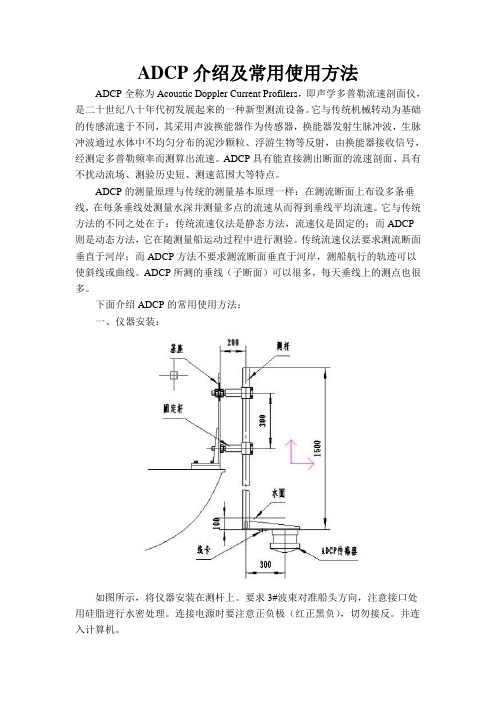
下面介绍ADCP的常用使用方法:一、仪器安装:如图所示,将仪器安装在测杆上。
要求3#波束对准船头方向,注意接口处用硅脂进行水密处理。
连接电源时要注意正负极(红正黑负),切勿接反。
并连入计算机。
二、仪器自检在仪器入水前,运行BBTALK软件,按软件提示操作,进行检查。
设置串口与波特率等:运行TEST命令文件完成测试。
三、数据采集运行WinRiver软件,选择采集模式。
根据实际情况,设置各设备的串口、参数等。
对于长江口测量常用参数如下(仅供参考):参数:600k及ADCP序号(如8532,9309等);Depth(深度)为ADCP放置在水下的深度,根据实际情况而定,一般为0.5;Vairation(磁偏角),上海的值为-4;MaxDepth(最大水深),可以取略大于实际水深2-3m的值来设定;SecendDepth,可取MaxDepth值;Max水速,一般长江口可取3.0,根据实际情况大概估计;Max船速,一般情况下不超过Max水速值;Streambed(底部土质),根据实际情况选择mud,slit,sand等;Bottelm Mode,一般选择Mode 5(选择AUTO亦可);Water Mode,一般选择Mode 1(选择AUTO亦可);专业相关的命令运算符如下:EX11111——转成enu(地球)坐标WP4——water-pin水跟踪(4个值一组)BP4——bottlem-pin底跟踪(4个值一组)WF25——盲区为25cmES10——指盐度(取实际值,不一定是10,只是举例,下同)WS50——分层单元,指一个seil层厚度,一般要求不高时用50cm,要求高时用30cmWN80——一共有多少个层?一般取(max水深/每个seil层厚度)+2的值,只要大于max水深/层厚就好了TE00000000——连续采集数据,若不设置的话一般为1.6s-2s一个数据,若需要自己设置时,00 00 00 00分别对应时、分、秒、毫秒设置值。
声学多普勒流速剖面仪检测方法

声学多普勒流速剖面仪检测方法我折腾了好久声学多普勒流速剖面仪检测方法,总算找到点门道。
一开始,我真是瞎摸索。
这声学多普勒流速剖面仪,听起来就很复杂。
我拿到这仪器的时候,都不知道从哪儿下手。
我先试着按照说明书的基本设置来,就像搭积木一样,一步一步照着做。
但是,问题很快就来了。
比如说,仪器的安装角度很关键。
我刚开始没太在意这个,就随便找个看着差不多的位置给安上了。
结果测出来的流速数据乱得一塌糊涂,就像一锅粥,我当时就懵了。
后来我才知道,这个安装角度得根据水流的方向还有周围的环境来调整。
你想啊,这就好比拍照的时候相机的角度没调好,拍出来的照片肯定不好看,一个道理。
还有这仪器的校准,哎呀,这可太折磨人了。
我试过用标准的流速装置来校准它,但是每次得到的结果都有点偏差。
我试过一次又一次,感觉自己都快陷入死胡同了。
有一次,我在调校准参数的时候,不小心把一个数值改得太大了,结果仪器直接报警,那次真的是个很惨的失败。
后来我就慢慢总结,得一点一点微调那些校准参数,不能心急。
在检测过程中,噪声的影响也很大。
周围环境嘈杂的时候,那仪器就跟受了惊吓一样,数据波动特别大。
我试过给仪器包上一些隔音的东西,像那种普通的泡沫,虽然不是专门的隔音材料,但多少有点效果。
不过这不是最好的方法,我还在摸索。
再有就是这仪器对水质也有点讲究呢。
如果水里杂质太多,确实会影响检测的准确性。
有次我去一个比较脏的水域检测,数据出来特别奇怪。
但是我不确定是水质对各种频率的波有特殊作用呢,还是里面的杂质干扰了仪器的传感器。
我觉得啊,要做好声学多普勒流速剖面仪的检测,首先就是要用心了解这个仪器,每一个按钮、每一个功能都得摸透。
再就是做检测之前,一定要把周围的环境因素考虑周全了,不管是安装位置、噪音还是水质啥的,不然就容易白费力气。
声学多普勒流速剖面仪ADCP简介
投标支持文件汇编投标产品名称:声学多普勒流速剖面仪 (ADCP)生产厂家:RD Instruments (RDI),美国(1)RDI公司及其ADCP简介(2)RDI公司ISO9001 国际质量体系认证证书(3)上海黄浦江和太浦河ADCP比测实验部分图片(4)长江三峡黄陵庙水文站ADCP与DGPS、测深仪、及电罗经集成试验简报(5)走航式ADCP测量软件WinRiver中文版(6)RDI公司河流型ADCP国内用户名单(7)关于ADCP四波束和三波束的讨论(8)关于ADCP工作模式的讨论(1) 美国RDI公司及其ADCP简介RD Instruments,简称RDI,位于美国加利福尼亚州圣地亚哥市,是全球最大的ADCP(即:声学多普勒流速剖面仪)生产厂家。
RDI已通过ISO9001国际质量体系认证。
目前年产值超过两千万美元。
RDI成立于1981年。
在二十多年的发展历程中,RDI始终位于ADCP技术的世界领先地位。
以下是 RDI公司的重要技术成果:•1981,生产出世界上第一台商品ADCP•1982,河流型ADCP,开创了ADCP河流流量测量的纪元•1991,宽带 ADCP专利技术•1995,“骏马”系列 ADCP:使ADCP小型化,价格大幅度降低•1997,“骏马”系列“瑞江”牌河流型ADCP•1998,相控阵ADCP专利技术•1999,ADCP波浪仪专利技术•2001,H-ADCP:用于河流流量在线监测•2001, 零盲区技术RDI公司向中国客户提供ADCP已有十几年的历史。
至今已有一百多台RDI公司生产的ADCP应用于中国的海洋、河流、科研船只、海军舰艇、海上采油平台、等等。
其中应用于河流流量测量的走航式ADCP有四十几台。
RDI公司生产的ADCP以其优良的性能和可靠性赢得了用户的好评。
其重要优点为:∙采用宽带专利技术,因此具有高分辩率、高精度。
这对走航测量尤为重要。
∙采用四波束换能器。
有效地消除船摇晃的影响; 提高测量的可靠性。
声学多普勒流速剖面仪ADCP简介概要
投标支持文件汇编投标产品名称:声学多普勒流速剖面仪 (ADCP)生产厂家:RD Instruments (RDI),美国(1)RDI公司及其ADCP简介(2)RDI公司ISO9001 国际质量体系认证证书(3)上海黄浦江和太浦河ADCP比测实验部分图片(4)长江三峡黄陵庙水文站ADCP与DGPS、测深仪、及电罗经集成试验简报(5)走航式ADCP测量软件WinRiver中文版(6)RDI公司河流型ADCP国内用户名单(7)关于ADCP四波束和三波束的讨论(8)关于ADCP工作模式的讨论(1) 美国RDI公司及其ADCP简介RD Instruments,简称RDI,位于美国加利福尼亚州圣地亚哥市,是全球最大的ADCP(即:声学多普勒流速剖面仪)生产厂家。
RDI已通过ISO9001国际质量体系认证。
目前年产值超过两千万美元。
RDI成立于1981年。
在二十多年的发展历程中,RDI始终位于ADCP技术的世界领先地位。
以下是 RDI公司的重要技术成果:•1981,生产出世界上第一台商品ADCP•1982,河流型ADCP,开创了ADCP河流流量测量的纪元•1991,宽带 ADCP专利技术•1995,“骏马”系列 ADCP:使ADCP小型化,价格大幅度降低•1997,“骏马”系列“瑞江”牌河流型ADCP•1998,相控阵ADCP专利技术•1999,ADCP波浪仪专利技术•2001,H-ADCP:用于河流流量在线监测•2001, 零盲区技术RDI公司向中国客户提供ADCP已有十几年的历史。
至今已有一百多台RDI公司生产的ADCP应用于中国的海洋、河流、科研船只、海军舰艇、海上采油平台、等等。
其中应用于河流流量测量的走航式ADCP有四十几台。
RDI公司生产的ADCP以其优良的性能和可靠性赢得了用户的好评。
其重要优点为:∙采用宽带专利技术,因此具有高分辩率、高精度。
这对走航测量尤为重要。
∙采用四波束换能器。
有效地消除船摇晃的影响; 提高测量的可靠性。
声学多普勒流速剖面仪(adcp)国内外进展

Doi:10.19661/ki.mi.2019.04.002!前沿动态】声学多普勒流速剖面仪(ADCP)国内外进展邓错(中国科学院声学研究所北京100190)摘要ADCP是目前最主要的流速测量手段之一,自研发成功以后就在国内外得到了广泛的应用。
本文介绍了ADCP的基本原理、主要类别和国际上ADCP的发展历程,并着重介绍了近年来我国在ADCP领域的研究进展情况,以及国产ADCP在海洋观测和水文测验等领域的应用情况。
随着我国科研水平的提升和国产ADCP的广泛应用,我国将会在ADCP领域取得更加显著的进步。
关键词声学多普勒流速剖面仪;国内外进展;海洋观测;水文测验中图分类号TH766Development of Acoustic Doppler Current Profiler at Home and AboardDENG Kai(Institute of Acoustics,Chinese Academy of Sciences,Be=jing100190,China)Abstract ADCP is one of the most important instruments in measuring ocean current,and it has been widely used globally since being developed successfully.Several subjects were introduced in this paper,including basic principles,classification and development history of ADCP,and especially,the progresses of domestic ADCP research and applications in ocean observation and hydrometric measurement.Along with the advancement of R&D capability in China and broad applications of domestic ADCP,we will make greater progress in the future.Keywords ADCP;development domestic and aboard;hydrometric measurement;ocean observation1ADCP的工作原理ADCP向水中发射声信号后,接收声信号经水体中散射体(如浮游生物、悬浮物等)散射后产生的回波信号,并对信号进行处理得到回波产生多普勒频移%根据多普勒原理,当ADCP和散射体之间存在相对运动,发射声波与散射回波频率之间就会产生多普勒频移,利用多普勒频移即可解算出ADCP与水体之间的相对速度叫目前,国际上ADCP主要采用的是宽带测速技术,采用由多个相同伪随机子序列组成的复杂编码发射信号,利用复协方差法估计回波信号的多普勒频移叫ADCP的每个换能器轴线组成一个波束坐标,每个换能器测的流速是沿其波束坐标方向的流速,ADCP先测出沿每一波束坐标的流速分量;再把波束坐标系的流速转换为局部坐标系的三维流速;最后用罗盘和倾斜计提供的方向和倾斜角把局部坐标系的流速转换为地球坐标系的流速%大多数ADCP换能器阵采用四波束JANUS配置,目的是最大限度地减少载体运动给ADCP测量带来的不利影响,提高ADCP的测速精度叫收稿日期:2019-11-01||8^^2019年第4期||2ADCP主要产品分类目前市场上的ADCP产品主要可以从以下几个方面进行分类!从换能器结构方式ADCP可以分为常规阵ADCP和相控阵ADCP,两者的区别在于。
75kHz声学多普勒流速剖面仪(ADCP)技术规格书20140322
75kHz自容式声学多普勒流速剖面仪技术规格书中国科学院声学研究所2014年3月目录1 简介 (1)2 主要性能指标 (1)3 接口 (3)3.1 电气接口 (3)3.2 安装接口 (4)3.3 数据接口 (4)3.3.1 命令格式 (6)3.3.2 输出格式 (16)1 简介75kHz自容式声学多普勒流速剖面仪(Self-contained Acoustic Doppler Current Profilers,ADCP)采用多普勒原理测量其自身相对海流的运动速度,壳体为铝合金材料,整机耐压3000米,最大测流量程500米,广泛用于海洋流场长期定点观测,实物照片如图1所示。
图1 多普勒流速剖面仪照片2 主要性能指标(1)工作频率:75kHz(2)测速范围:±10m/s(3)准确度:±1%测量值±0.5cm/s(4)测流层数:1~128层;分层厚度:4,8,16,32m(5)测流最大作用距离:500m 1(6)数据接口:RS422;波特率:300至11520,缺省9600(7)内置压力、温度、方位和姿态传感器(8)数据内存容量:2GB(9)功耗:30V供电时,待机功耗小于20mW,低功率发射时功耗小于5W,高功率发射时功耗小于25W(10)电源:直流输入,24-50V;4个550WH电池组,开路电压40~42V (11)主机外径:φ561mm⨯1037mm(不包含插座高度),壳体材料:铝合金;相关尺寸见图2(12)环境适应性:工作温度:-5︒C--+45︒C;储存温度(不含电池):-30︒C --+50︒C (13)最大工作水深:3000m(14)重量:95kg(空气中)/约58kg(水中)注:1,流散射强度不低于-70dB条件下图2 3000米耐压75kHz自容式ADCP外形尺寸3 接口3.1 电气接口在ADCP的上部有2个插座,分别为9芯的工作接口(采用Subconn公司MCLPBH9MSS型插座)和7芯网络测试接口(采用Subconn公司MCLPBH7MSS 型插座),信号定义见图1和表2;1)工作接口供电电压范围为电压范围为24~50V;数据通讯采用RS422形式,缺省通讯设置波特率为9600,1位停止位,无校验,ADCP通过RS422接口接收主控计算机的命令同时把测量数据发送给主控计算机,软件协议见3.3数据接口部分。
声学多普勒流速剖面仪(ADCP)试验观测及应用初探
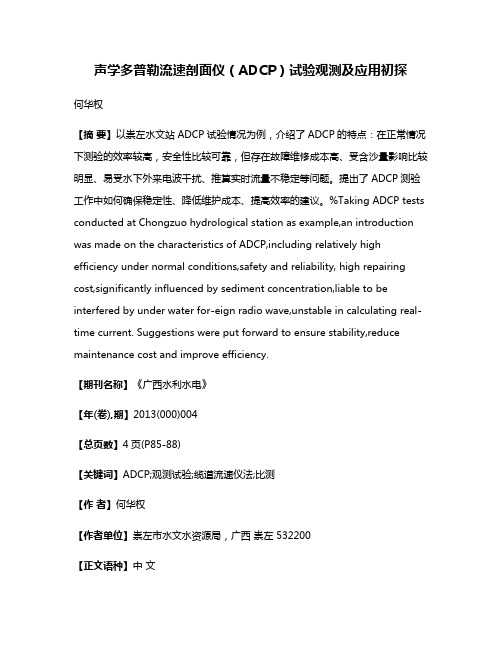
声学多普勒流速剖面仪(ADCP)试验观测及应用初探何华权【摘要】以崇左水文站ADCP试验情况为例,介绍了ADCP的特点:在正常情况下测验的效率较高,安全性比较可靠,但存在故障维修成本高、受含沙量影响比较明显、易受水下外来电波干扰、推算实时流量不稳定等问题。
提出了ADCP测验工作中如何确保稳定性、降低维护成本、提高效率的建议。
%Taking ADCP tests conducted at Chongzuo hydrological station as example,an introduction was made on the characteristics of ADCP,including relatively high efficiency under normal conditions,safety and reliability, high repairing cost,significantly influenced by sediment concentration,liable to be interfered by under water for-eign radio wave,unstable in calculating real-time current. Suggestions were put forward to ensure stability,reduce maintenance cost and improve efficiency.【期刊名称】《广西水利水电》【年(卷),期】2013(000)004【总页数】4页(P85-88)【关键词】ADCP;观测试验;缆道流速仪法;比测【作者】何华权【作者单位】崇左市水文水资源局,广西崇左 532200【正文语种】中文【中图分类】P335崇左站于2009年4月安装了ADCP在线测流系统,2009年5月开始运行,并与缆道流速仪法进行比测,其比测情况如下。
无线传输声学多普勒流速剖面仪
声学多普勒流速剖面仪无线传输系统1、声学多普勒流速剖面仪简介声学多普勒流速剖面仪(简称走航式ADCP)是美国TRDI公司生产的声学测流设备,主要用于河流流量的自动测验,是取代传统流量测量方式的高科技产品。
走航ADCP外型如图1所示,具体参数技术指标如下:图1 走航式ADCP外形图2、引进无线传输系统的必要性采用走航式ADCP进行河流流量测验时,需要将走航式ADCP探头悬淹入水面以下一定深度,从岸的一边移动到另外一边,这样走航式ADCP将整个断面流量测验出。
为保证流量测验精度,必须满足以下测验条件:(1)、每次流量测验需要往返4次,每次流量测验值和4次的平均值比较后,误差不得超过5%,如果超过5%,查找分析误差原因,并重新测验;(2)、为保证流量测验精度,每次测验时,走航式ADCP移动速度不能太快,尽量让船速小于等于流速;(3)、尽量保证船体平稳。
走航式ADCP移动过程中,船体前后、左右摇晃角度尽可能小;(4)、走航式ADCP在流量测验中,尽量保持较为顺直的移动路线。
测流轨迹尽可能垂直于主流方向。
对于采用走航式ADCP进行流量测验时,一般将ADCP探头悬挂在船体外侧,测验人员携带蓄电池、笔记本电脑等测流设备上船进行流量测验。
机动船往往移动速度较快,枯水期船速大大高于水流速度,高水时水面流速很大,船速和航向难于控制,影响流量测验精度,且安全生产难于保证。
为彻底解决采用走航式ADCP进行流量测验过程中出现的问题,拟采用无线传输系统配合走航ADCP进行流量测验。
将走航式ADCP安装在船体上,船体内部有蓄电池和无线传输电台,船体有悬挂结构,便于采用水文站缆道系统进行低速平稳牵引。
安装走航式ADCP的船体需要保持平稳,尽可能采用三体结构。
船体后部有尾翼便于控制航向。
电台和蓄电池安装在船舱内,需要良好的防水。
走航式ADCP测流时信号量很大,传输数据多。
为保证信号传输质量,无线传输电台串口要达到115200比特位/秒。
声学多普勒流速剖面仪(ADCP)的应用实例
声学多普勒流速剖面仪 (ADCP) 的应用实例声学多普勒流速剖面仪 (ADCP) 是一种融合了多学科技术而研制的新型测速声呐设备,作为水声技术的一个典型应用,作为一种测速仪器,ADCP 在水运工程 (包括内河和海洋工程) 中得到了广泛应用,对于声学多普勒测流技术的研究日益受到人们的关注。
目前测流仪器种类繁多, 按照工作原理的不同可以分为机械式海流计、压力式海流计、电磁式海流计以及声学海流计等。
现在大量运用的是声学多普勒海流计。
声学多普勒海流计采用声遥测方式,对被测流场无干扰,能够获得高精度的速度信息,被国际海委会定为4 种先进的海洋观测仪器之一,因此ADCP 成为当前广泛采用的测流仪器,是水资源调查中必不可少的重要测验设备。
通过ADCP 在具体工程中的应用研究,归纳总结了ADCP 在工程应用中的主要工作流程,以及在工程应用中的注意事项。
一、ADCP 工作原理( 一 ) 多普勒效应波源和观察者有相对运动时,观察者接收到波的频率与波源发出的频率并不相同的现象;如果二者相互接近,观察者接收到的频率增大;如果二者远离,观察者接收到的频率减小。
这便是著名的多普勒效应 (奥地利物理学家及数学家克里斯琴· 约翰· 多普勒于1842 年首先提出这一理论) ,它不仅适用于声波,同样适用于所有类型的波,包括电磁波。
ADCP 就是利用声波的多普勒效应发展起来的一种新型测流设备, 它是一种既可测量相对水底速度, 同时又可以兼顾测量相对水流速度的声呐设备。
ADCP 利用声学多普勒原理,测量分层水介质散射信号的频移信息,并利用矢量合成方法获取海流垂直剖面水流速度, 即水流的垂直剖面分布。
对被测验流场不产生任何扰动,也不存在机械惯性和机械磨损,能一次测得一个剖面上若干层的流速的三维分量和绝对方向。
(二) ADCP 测流原理水体中存在大量的散射体,诸如微小粒子、浮游生物等,它们随水体流动。
这些散射体和水体是融为一体的,其速度即代表水流速度。
ADCP(声学多普勒海流剖面仪)测量原理与技术

一般来说GPS方法测船速不如“底跟踪”方 法精确。
ADCP测量原理与技术
盲区
所谓盲区, 是由于测船不能靠近, 或者因ADCP本身的原因, 仪器无法测 到数据的区域, 称为“ 盲区”, 亦可称作“ 非实测区”。 顶部盲区;底部盲区;侧部盲区
TRAIN APPROACHES-Higher Pitch
TRAIN RECEDES-Lower Pitch
ADCP测量原理与技术
波束和地球坐标
波束(wave beam)是指由换能器发射出来的声脉冲波在测流面上形成的 形状(比如说像手电筒向黑暗处射出的光束)。
地球直角坐标系:原点O与地球质心重合,Z轴指向地球北极,X轴指向 地球赤道面与格林尼治子午圈的交点 。
横摇(roll),又称侧滚角,导航系统中用来标 识目标的横向倾角,其值等于目标物体所在平 面上,与艏艉线垂直的线与其在水平面的投影 间的夹角。
升沉(heave),船体在垂向的移动距离。
纵摇、横摇、升沉由姿态传感器测得。
ADCP测量原理与技术
深度单元(Bin)
水流在垂向上被分割成若干单元,叫深度单元(depth cell) 一台ADCP相当于许多单点测流仪
ADCP测量原理与技术
艏向、纵摇、横摇、升沉
艏向(Heading),在某时刻船首在水平面上的方位,用与基准方位间的偏转角度 表示,通常基准方位为0°按顺时针依次增加,360°与0°重合。 由罗经测得。
纵摇(pitch),又称俯仰角,导航系统中用来 标识目标的纵向倾角,其值等于艏艉线与其在 水平面的投影间的夹角。
ADCP测量原理与技术
国产自容式声学多普勒流速剖面仪(ADCP)的适用性评估方法及其应用分析

国产自容式声学多普勒流速剖面仪(ADCP)的适用性评估方法及其应用分析刘轲;商少平;贺志刚【期刊名称】《厦门大学学报(自然科学版)》【年(卷),期】2015(054)006【摘要】中国科学院声学所研制的自容式声学多普勒流速剖面仪(ADCP)在实验室中已完成较为严苛的环境试验,但在真实海洋环境条件下的海流测量能力还需要进行测试评估.在2013-2014年,通过潜标比测试验和潜标一致性检验试验,对中国科学院声学所150和300 kHz自容式ADCP(简称IOA150和IOA300)的工作稳定性、剖面范围、产品一致性、测流性能进行适用性评估.潜标比测试验中选择世界上使用较多的美国RDI(Teledyne RD Instruments)的自容式ADCP作为标准设备.结果表明:中国科学院声学所研制的自容式ADCP工作可靠,测流持续稳定,测流误差、剖面范围与同频率RDI自容式ADCP相当,可满足长期观测需要.【总页数】6页(P837-842)【作者】刘轲;商少平;贺志刚【作者单位】厦门大学海洋观测技术研发中心,福建厦门361005;厦门大学海洋观测技术研发中心,福建厦门361005;厦门大学海洋观测技术研发中心,福建厦门361005【正文语种】中文【中图分类】P716+.21【相关文献】1.声学多普勒流速剖面仪(ADCP)试验观测及应用初探 [J], 何华权2.基于声学多普勒流速剖面仪(ADCP)的应用研究 [J], 陈福春;唐晶晶;康修洪;邓凌毅3.ADCP应用研究:声学多普勒流速剖面仪检定水槽拖车试验综述 [J], 乔正明;肖熹;吴姚振;任浩宇;尹锡帆;赵小峰4.声学多普勒流速剖面仪(ADCP)在长江河道水文测验中的应用推广 [J], 孔汪洋5.声学多普勒流速剖面仪(ADCP)国内外进展 [J], 邓锴因版权原因,仅展示原文概要,查看原文内容请购买。
ADCP简介及操作
1H-ADCP简介1.1 ADCP理论知识H-ADCP是英文Horizontal Acoustic Doppler Current Profiler的缩写。
中文通常译为水平声学多普勒流速剖面仪。
流速、流量测验方法的发明被认为是河流流量测验领域的一次革命。
它比传统的河流流量测验方法提高效率十几倍。
标志着河流流速、流量测验的现代化。
H-ADCP是一种利用声学多普勒原理测验水流速度剖面的仪器。
H-ADCP一般配备有二个(或四个)换能器。
换能器与轴线成一定夹角。
每个换能器既是发射器又是接收器。
换能器发射的声波具有指向性,即声波能量集中于较窄的方向范围内(称为声束,类似于探照灯发射的光束)。
换能器发射某一固定频率的声波,然后聆听被水体中颗粒物散射回来的声波。
假定颗粒物的运动速度与水体流速相同。
当颗粒物的运动方向是接近换能器时,换能器聆听到的回波频率比发射波频率高。
当颗粒物的运动方向是背离换能器时,换能器聆听到的回波频率比发射波频率低。
如前所述,假定水体中颗粒物的运动速度与水体流速相同,通过跟踪颗粒物的运动(称为“水跟踪”)所测验的速度是水流相对于(也即安装平台)的速度。
当安装在固定平台上,“水跟踪”测验的流速即为水流的绝对速度。
当安装在船上(移动平台),在“水跟踪”测验的相对速度中扣除船速(平台的移动速度)后即得到水流的绝对速度。
H-ADCP 流速坐标:声束坐标仪器坐标:X-Y流速数据:Ux, Uy注:不含罗盘H-ADCP用途:河流水文站或水情站流速、流量实时测验,明渠流速、流量实时测验;灌渠流速、流量实时测验;河流水质监测站总量实时监测;利用H-ADCP提供的流速和水位数据,应用指标流速法或数值方法计算流量。
河流、河口区流场数据采集,为流场数值模型提供标定或验证数据。
港口水域流场实时监测,为保证进出港船只安全提供流速数据。
海上采油平台附近流场实时监测H-ADCP应用:(1)通过电缆与电脑连接即可以作为一个独立的流速、流量在线监测系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
75kHz自容式声学多普勒流速剖面仪技术规格书中国科学院声学研究所2014年3月目录1 简介 (1)2 主要性能指标 (1)3 接口 (3)3.1 电气接口 (3)3.2 安装接口 (4)3.3 数据接口 (4)3.3.1 命令格式 (6)3.3.2 输出格式 (16)1 简介75kHz自容式声学多普勒流速剖面仪(Self-contained Acoustic Doppler Current Profilers,ADCP)采用多普勒原理测量其自身相对海流的运动速度,壳体为铝合金材料,整机耐压3000米,最大测流量程500米,广泛用于海洋流场长期定点观测,实物照片如图1所示。
图1 多普勒流速剖面仪照片2 主要性能指标(1)工作频率:75kHz(2)测速范围:±10m/s(3)准确度:±1%测量值±0.5cm/s(4)测流层数:1~128层;分层厚度:4,8,16,32m(5)测流最大作用距离:500m 1(6)数据接口:RS422;波特率:300至11520,缺省9600(7)内置压力、温度、方位和姿态传感器(8)数据内存容量:2GB(9)功耗:30V供电时,待机功耗小于20mW,低功率发射时功耗小于5W,高功率发射时功耗小于25W(10)电源:直流输入,24-50V;4个550WH电池组,开路电压40~42V (11)主机外径:φ561mm⨯1037mm(不包含插座高度),壳体材料:铝合金;相关尺寸见图2(12)环境适应性:工作温度:-5︒C--+45︒C;储存温度(不含电池):-30︒C --+50︒C (13)最大工作水深:3000m(14)重量:95kg(空气中)/约58kg(水中)注:1,流散射强度不低于-70dB条件下图2 3000米耐压75kHz自容式ADCP外形尺寸3 接口3.1 电气接口在ADCP的上部有2个插座,分别为9芯的工作接口(采用Subconn公司MCLPBH9MSS型插座)和7芯网络测试接口(采用Subconn公司MCLPBH7MSS 型插座),信号定义见图1和表2;1)工作接口供电电压范围为电压范围为24~50V;数据通讯采用RS422形式,缺省通讯设置波特率为9600,1位停止位,无校验,ADCP通过RS422接口接收主控计算机的命令同时把测量数据发送给主控计算机,软件协议见3.3数据接口部分。
RS422电平转换芯片型号为MAX3491EESD。
同步信号可通过跳线选择(需打开ADCP后盖进行跳线,默认为RS485接口)为光耦隔离的5V CMOS电平或RS485信号(Trigger+、Trigger-分别对应RS485信号A、B),可通过软件选择为输入同步或输出同步,输入同步时脉冲宽度需不小于2ms,输出同步时脉冲宽度固定为20ms。
2)调试接口测试接口一般做调试用,可对ADCP的使用进行相对复杂的设置和调试,采用10M以太网接口。
3.2 安装接口ADCP与载体的安装主要通过抱瓦安装。
)加工相应的抱瓦,通过抱瓦实现与载体的需根据ADCP筒体直径(202安装,图3是ADCP通过抱瓦安装在支架上的情况。
图3 抱瓦安装方式3.3 数据接口ADCP配置参数可以通过10Mbps以太网接口实现,在这种方式只需把调试电缆接上其7芯插座,并在计算机上运行显控软件ADCPPanel,按照操作说明即可完成对ADCP所有工作参数的配置,并获取ADCP测量的实时结果数据和内记结果数据。
为与国外产品兼容,也可以通过RS422串口完成ADCP的配置,其测量的结果数据也可以通过串口输出,在串口配置情况下,命令格式、数据输出格式都与RDI公司ADCP现有格式保持兼容,并对数据输出格式做了适当简化,具体可参考RDI公司ADCP文档“WorkHorse Commands and Output Data Format.pdf”,目前软件能实现的串口命令格式和数据格式见3.3.1和3.3.2,若需要实现其它串口命令和输出格式,则需对软件进行定制。
ADCP共有四种状态,即工作状态、参数配置状态、休眠状态和断电状态,其中工作状态为ADCP正常测量状态;休眠状态为ADCP休眠,此时ADCP进入低功耗模式;参数配置状态为ADCP停止工作,等待接收用户的参数配置命令;断电状态为ADCP彻底断电。
以下主要介绍在使用串口情况下对ADCP进行配置的命令格式和数据格式。
首先,ADCP采用了一个较为特殊的命令,该命令不更改ADCP的配置参数,只用于ADCP状态的切换,即Break命令,用串口的Break状态(Break状态不是串口输出的某个特定字符,而是一种串口的状态,从物理电平上看就是串口的输出从闲态的逻辑1变化为较长持续时间的逻辑0,持续时间一般需大于200ms,之后再次变为逻辑1)实现。
工作状态下,Break命令用来停止ADCP的工作使其进入参数配置状态;如果ADCP处于休眠的状态,用Break可以唤醒ADCP,并进入参数配置状态。
需注意如果ADCP处于断电状态,则在上电后直接进入工作状态,而RDI 公司ADCP在更换电池后先进入休眠状态,用法略有不同,这里的更改主要是出于具体使用方便的考虑,具体如图4所示:图4 ADCP主机状态切换示意图其它命令采用“字母数字回车”格式,如” WS3200<CR>”表示将层厚设置为3200cm,命令应答方式为将收到的字符原封不动地回复给上位机作为应答;用户可以采用通用的串口软件实现对ADCP的控制。
数据输出有两种协议:PD0格式、PD6格式,均为RDI公司ADCP规定的标准格式;其中PD0格式包含了ADCP可提供的全部数据内容,为二进制格式,PD6为RDI专为ADCP设计的格式,用ASCII码表示,不输出测流数据。
3.3.1 命令格式根据目前项目需求,只实现了部分RDI公司ADCP的命令,<CR>表示回车符,具体命令如下:CS功能:开始工作格式:CS<CR>描述:命令ADCP进入工作状态举例:CS<CR>CB功能:设置串口通信参数(波特率、校验位、停止位)格式:CBnnn<CR>描述:第一个n表示波特率,第二个n表示校验位,第三个n表示停止位,具体如下表所示:举例:CB411<CR>默认:CB411<CR>Break功能:中断或唤醒格式:串口Break状态,至少保持400ms描述:命令ADCP进入参数配置状态举例:串口Break状态,等待串口提示ADCP收到BreakCK功能:保存参数配置格式:CK<CR>描述:将目前的ADCP参数配置保存至非易失存储器,掉电后不丢失,ADCP重新上电后即采用该配置举例:CK<CR>CQ功能:调整发射功率格式:CQnnn<CR>描述:n nn表示发射功率,只能取000或255,000表示低功率发射,255表示高功率发射举例:C Q000<CR>,设置为低功率发射(除水池试验外,其它场合不建议使用)默认:CQ255<CR>CZ功能:休眠格式:CZ<CR>描述:命令ADCP进入休眠状态举例:CZ<CR>AF功能:校准姿态传感器的Heading值,去除环境磁场的影响格式:AF<CR>描述:发送该命令后,需转动ADCP,使其处于至少12种不同的姿态,否则会使姿态传感器失效,一般情况下不建议使用该命令。
举例:AF<CR>,然后转动ADCP,等待串口提示校准完毕AR功能:姿态传感器恢复出厂设置格式:AR<CR>描述:如果校准失败导致姿态传感器失效,可用该命令使姿态传感器恢复出厂设置举例:AR<CR>,等待串口提示恢复完成AZ功能:校准压力传感器格式:AZ<CR>描述:该命令需在空气中进行,校准压力传感器的0点举例:AZ<CR>,等待串口提示校准完毕BF功能:设置预估底深格式:BFnnnnn<CR>描述:nnnnn为预估底深,单位分米,0为不采用预估底深举例:B F01000<CR>,设置预估底深为100米,在100米深度的附近进行底搜索默认:B F00000BK功能:设置水团跟踪模式格式:BKn<CR>描述:n为0-3,具体如下表所示:举例:B K0<CR>,关闭水团跟踪模式默认:B K0BL功能:设置水团跟踪参数格式:BLmmm,nnnn,ffff<CR>描述:mmm为最小水层厚度(0-999分米)nnnn为近端边界(0-9999分米)ffff为远端边界(0-9999分米)BL命令设置了水团跟踪层,水团跟踪的结果可用作底ping结果无效时的参考值,当近端边界加最小水层厚度大于80%底深时,无水团跟踪ping,如下图所示:图5 水团跟踪的范围举例:B L160,320,480<CR>,设置最小水层厚度为16米,近端32米,远端48米默认:BL160,320,480<CR>BX功能:设置最大测底深度格式:BXnnnn<CR>描述:nnnn为最大底深,单位分米举例:B X2000<CR>,设置最大测底深度为200米默认:B X2000BP功能:设置测底帧数格式:BPnnn<CR>描述:nnn为帧数,只能为000或001举例:B P000<CR>,设置为不测底默认:B P001<CR>功能:设置盲区长度格式:WFnnnn<CR>描述:nnnn为盲区长度,单位厘米,最小176厘米举例:W F0200<CR>,设置盲区为2米默认:WF0176WC功能:设置测流相关系数门限格式:WFnnn<CR>描述:nnn为相关系数门限举例:W F051<CR>,设置相关系数门限为51/255= 0.2 默认:WF051WS功能:设置层厚格式:WSnnnn<CR>描述:nnnn表示具体层厚,单位厘米举例:W S0800<CR>,设置层厚为8米默认:WS0400WN功能:设置层数格式:WNnnn<CR>描述:nnn表示层数举例:W N020<CR>,设置测量20层默认:WN030功能:设置测流帧数格式:WPnnnnn<CR>描述:nnnnn表示帧数,只能为00000或00001举例:W P00000<CR>,设置为不测流默认:WP00001EX功能:设置坐标系格式:EXnnnnn<CR>描述:具体如下表所示:举例:EX10111<CR>,为船坐标系,采用Pitch和Roll修正,允许流层映射,允许三波束解算默认:EX10111<CR>ES功能:设置盐度千分比格式:ESnn<CR>描述:nn表示水体盐度千分比举例:E S35<CR>,设置盐度为千分之三十五默认:ES35<CR>EZ功能:设置传感器数据来源格式:EZcdhprst<CR>描述:具体如下描述:举例:E Z1111101<CR>默认:EZ1111101<CR>EC功能:设置声速的值格式:ECnnnn<CR>描述:nnnn表示声速的值,单位米每秒举例:E C1500<CR>默认:EC1500<CR>ED功能:设置换能器入水深度格式:EDnnnnn<CR>描述:n nnnn入水深度的值,单位分米,表示换能器入水深度采用手动值时的大小举例:E D00050<CR>,设置换能器入水深度为5米默认:ED00000<CR>TT功能:设置ADCP内部的实时时钟格式:TTccyy/mm/dd,hh:mm:ss<CR>描述:ccyy为年,范围1900-2099mm为月,范围01-12dd为日,范围01-31hh为小时,范围00-23mm为分钟,范围00-59ss为秒,范围00-59举例:TT2011/05/11,09:25:15<CR>,设置实时时钟为2011年5月11日,9点25分15秒SA功能:同步粗定时格式:SAxyz<CR>描述:x表示在ping之前发送(或等待)同步脉冲y固定为0z表示在何种类型的ping时发送(或等待)同步脉冲举例:如下表所示:默认:SA001<CR>SM功能:设置ADCP主从工作模式格式:SMn<CR>描述:n为0表示异步发射模式,这时同步相关命令全部无效n为1表示主机模式,发送同步脉冲n为2表示从机模式,等待同步脉冲举例:S M1 <CR>,设置ADCP为发送同步脉冲默认:SM0 <CR>PD功能:输出数据格式格式:PDn<CR>描述:n表示输出数据格式,可选为0或6举例:P D6<CR>,采用PD6格式默认:PD0<CR>RE功能:清空Flash存储空间格式:RE<CR>描述:擦除全部Flash空间,以便于重新存储新的数据举例:输入RE<CR>,等待串口提示擦除完毕RF功能:查看Flash剩余存储空间格式:RF<CR>描述:查看Flash剩余空间,以便于数据管理举例:输入RF<CR>,等待串口提示剩余存储空间3.3.2 输出格式ADCP输出格式目前主要兼容RDI公司使用广泛的PD0格式和PD6格式,也可以根据需求对软件进行修改后输出用户定制的其它数据格式。