基于MATLAB的异步电动机仿真
基于Matlab的三相异步电动机起动、调速和制动特性仿真
信息工程学院基于Matlab的三相异步电动机起动、调速和制动特性仿真摘要:异步电动机目前在日常生活中已得到广泛应用,其主要特点为结构简单、运行可靠、效率较高和成本较低。
为使其应用更加广泛且性能更加完善,有必要对其最基本的起动、制动和调速性能进行深入研究。
而随着电机研究的不断深入,仿真就成为对其进行研究的一个重要手段,其中Matlab软件以其方便、高效、直观的特点,广泛应用于异步电动机的仿真研究,方便快捷且节约资源,为解决一些复杂问题带来了极大的方便。
本文通过Matlab软件进行仿真,研究异步电动机起动、调速和制动的各种方法,以找到提高其性能的途径,并通过与理论相对比,验证了本文模型的有效性和正确性。
关键词:Matlab;仿真;异步电动机Simulation for Start-up ,Speed Control and Braking Character of Three-phase Asynchronous Motor Based onMatlabAbstract:Asynchronous motor has been widely used in our daily life at present, the main characteristics of simple structure, reliable operation, high efficiency and low cost. In order to make its application more widely and performance will be improved, it is necessary for the most basic starting, braking and speed regulating performance for further research. And with the research of motor, the simulation has become an important means to study, the Matlab software, with its convenient, efficient and intuitive features, are widely used in the simulation research of asynchronous motor is convenient and save resources, to solve some complex problems has brought great convenience.Based on the Matlab software simulation, the asynchronous motor starting, speed and braking methods, in order to find ways to improve its performance, and compared with the theory, proves the correctness and the effectiveness of the model. Key words:Matlab; simulation; asynchronous motor1 设计目的和意义1.1 概述在科学技术发展迅速的当今社会,电机已经成为生活中必不可少的一部分,为人们的生产生活提供了极大的方便。
基于MATLAB的异步电动机起动过程的仿真研究
m m o n a
l U
se
d B lo c k s / Co n s ta n t】
、
直 接 起 动 仿 真模 型 建 立 ( 见 图 1
图2 )
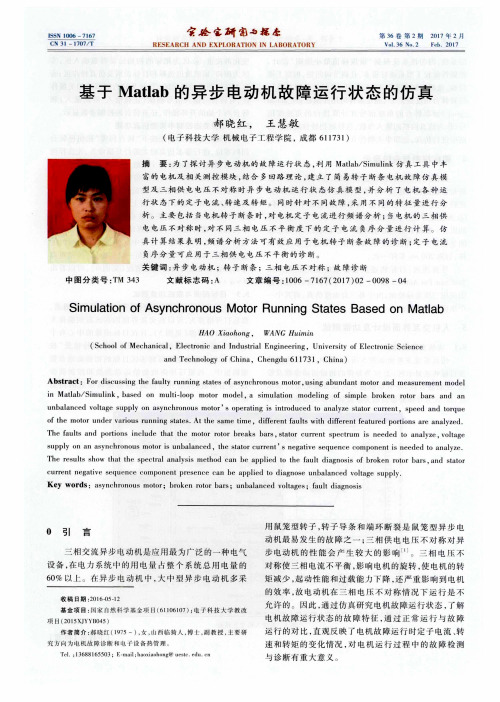
图4 转 子 串 电阻 起 动 起 动仿 真 波形
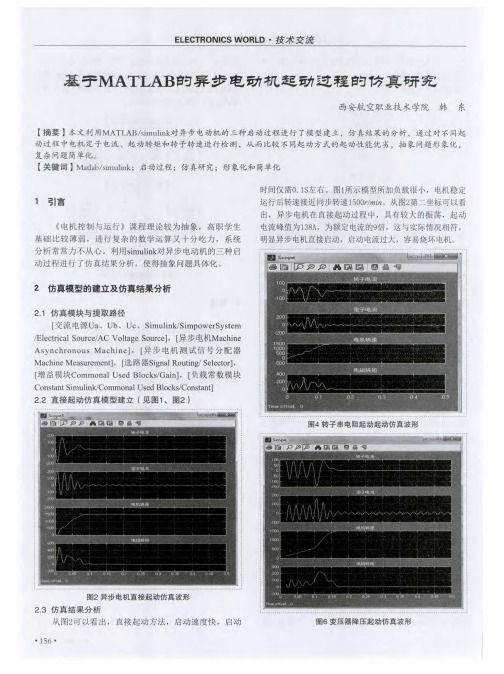
图 2 异 步 电机 直 接 起 动 仿 真 波 形
2 3
.
仿真 结果 分 析
直接起动方法
,
启动 速度快
w
e r
S y s te
a c
m
/ E le c tr ic
A
M
s
a
l So
u rc e
AC V / M
a c
o
lt a g e S o
e
,
u r c e
]
,
[异 步 电机 M
R
h in
e
y
n c
h
e
r o n o u s
h in
t】 ,
】 [异 步 电机 测 试 信 号 分 配 器
o u
,
a c
h in
;
;
;
形 象化 和 简 单 化
时 间仅 需0
1
.
1S 左 右。ຫໍສະໝຸດ 图 1 所 示 模 型 所加 负载很 小
in
,
。
,
电机稳 定 起动
,
引言
《电 机 控 制 与 运 行 》 课 程 理 论 较 为 抽 象
m 运 行后 转 速 接近 同步 转速 1 5 0 0 r /
从 图2 第 二 坐 标 可 以看
,
出
,
种方式
,
,
,
但 这 种 方 式缺 点是 起动 电流
基于MatlabSimulink的异步电机矢量控制系统仿真

基于MatlabSimulink的异步电机矢量控制系统仿真一、本文概述随着电力电子技术和控制理论的不断发展,异步电机矢量控制系统已成为现代电机控制领域的重要分支。
该系统通过精确控制异步电机的磁通和转矩,实现了对电机的高效、稳定和动态性能的优化。
Matlab/Simulink作为一种强大的仿真工具,为异步电机矢量控制系统的研究和设计提供了便捷的平台。
本文旨在探讨基于Matlab/Simulink的异步电机矢量控制系统仿真方法。
文章将简要介绍异步电机矢量控制的基本原理和关键技术,包括空间矢量脉宽调制(SVPWM)技术、转子磁链观测技术以及矢量控制策略等。
详细阐述如何利用Matlab/Simulink搭建异步电机矢量控制系统的仿真模型,包括电机模型、控制器模型以及系统仿真模型的构建过程。
文章还将探讨仿真模型的参数设置、仿真过程以及仿真结果的分析方法。
通过本文的研究,读者可以深入了解异步电机矢量控制系统的基本原理和仿真方法,掌握基于Matlab/Simulink的仿真技术,为异步电机矢量控制系统的实际设计和应用提供有益的参考和借鉴。
本文的研究也有助于推动异步电机矢量控制技术的发展和应用领域的拓展。
二、异步电机基本原理异步电机,又称感应电机,是一种广泛应用于工业领域的电动机。
其基本原理基于电磁感应和电磁力作用。
异步电机主要包括定子(静止部分)和转子(旋转部分)。
定子通常由铁芯和三相绕组构成,而转子则可能由实心铁芯、鼠笼型或绕线型结构组成。
当异步电机通电时,定子绕组中的三相电流会产生旋转磁场。
这个旋转磁场与转子中的导体相互作用,根据法拉第电磁感应定律,会在转子导体中产生感应电动势和感应电流。
这些感应电流在旋转磁场的作用下,受到电磁力的作用,从而使转子产生旋转力矩,驱动转子旋转。
异步电机的旋转速度与定子旋转磁场的旋转速度并不完全同步,这也是其被称为“异步”电机的原因。
异步电机的旋转速度通常略低于旋转磁场的同步速度,这是由于转子导体的电感和电阻导致的电磁延迟效应。
基于MATLAB的异步电机变频调速系统的仿真与分析

基于MATLAB的异步电机变频调速系统的仿真与分析1.引言随着工业自动化水平的不断提高,对电机变频调速系统的要求也越来越高。
异步电机是目前工业中最为常见的一种电机类型,其变频调速系统在工业生产中发挥着至关重要的作用。
通过变频调速系统,可以实现电机的精确控制和能耗优化,提高生产效率和降低运行成本。
对异步电机变频调速系统进行仿真与分析,对于工业生产具有重要意义。
MATLAB是一款功能强大的技术计算软件,具有丰富的工具箱和仿真功能,可以方便地进行电机系统的建模和仿真分析。
本文将基于MATLAB对异步电机变频调速系统进行仿真与分析,探讨其性能特点和优化方法。
2.异步电机变频调速系统的基本原理异步电机的变频调速系统是通过改变电机的输入频率和电压,从而控制电机的转速和转矩。
基本原理是利用变频器对电源进行调节,改变电机的供电频率和电压,以实现对电机转速的精确控制。
在变频调速系统中,一般采用闭环控制结构,通过反馈电机转速信息,控制变频器的输出频率和电压,从而实现对电机的精确控制。
还需要考虑电机的负载特性和动态响应特性,以保证系统稳定性和性能优化。
在MATLAB中,可以利用Simulink工具箱进行异步电机变频调速系统的建模。
首先需要建立电机的数学模型,包括电机的电气特性、机械特性和传感器特性等。
然后,在Simulink中建立闭环控制系统模型,包括电机模型、变频器模型和控制器模型等。
通过建立完整的系统模型,可以对异步电机变频调速系统进行仿真分析。
可以通过改变输入信号和参数,观察系统的动态响应和稳定性能,进而优化系统的控制策略和调速性能。
4.仿真与分析通过MATLAB对异步电机变频调速系统进行仿真与分析,可以得到系统的各项性能指标和特性曲线。
其中包括电机的转速-转矩特性曲线、电机的效率曲线、系统的响应时间和稳定性能等。
在仿真过程中还可以考虑不同的工况和负载情况,对系统进行多种工况的分析和评估。
通过对系统性能的综合分析,可以得到系统的优化方案和改进措施,提高系统的控制精度和能效性能。
基于Matlab的异步电动机故障运行状态的仿真
0 引 言
三相 交流 异步 电动机 是应 用最 为广泛 的一 种 电气 设备 ,在 电 力系统 ·}|的用 电量 占整 个 系统 总用 电量 的 60% 以上 。在异 步 电 动机 中 ,大 中型 异 步 电 动机 多 采
收 稿 日期 :20164)5-l2 基 金 项 目 :闭 家 自然 科学 旗金 项 H (61106107);电 子 科 技 大 学 教 改 项 目 (2015XJYY11045) 作 者 简 介 :郝 晓 红 (1975一),女 .IlI阿临 猗 人 ,博 副 教 授 .主 要 研 究 方 向 为电 机 故 障 诊 断 乖II电 子 设 备热 管 理
HAO Xiaohong, WANG Hu,imin
(School of Mechanical,Electronic and Industrial Engineering,University of Electronic Science and Technology of China,Chengdu 61 1731,China)
郝 晓 红 , 王 慧敏
(电子 科技 大学 机 械 电子T程 学 院 ,成 都 61 1731)
摘 要 :为 了探 讨 异 步 电 动 机 的 故 障 运 行 状 态 ,利 用 Matlab/Simulink仿 真 工 具 中 丰
富 的 电 机 及 相 关 测 控 模 块 ,结 合 多 回 路 理 论 ,建 立 了 简 易转 子 断 条 电 机 故 障 仿 真 模
电 电压不 对称 时 ,对 不 同三 相 电 压不 平衡 度 下 的 定 子 电流 负序 分量 进 行 计 算 。仿
真计算 结 果表 明 ,频谱 分析 方法 可有 效应 用 于电机 转 子 断条故 障的诊 断 ;定 子 电流
基于MATLAB的异步电机VVVF调速系统仿真

摘要:随着电力电子技术的发展,异步电机以其在变频调速方面的优点开始显现出来了,相对于直流电机有更加广泛的应用本论文主要介绍了异步电机的工作原理以及异步电机的调速方法。
通过改变频率、改变电源电压、改变极对数等方法来改变电机的转速,我是通过改变电机频率来达到改变电机转速的目的,本文还介绍了变频器的原理和PWM(pulse width modulation)变频器的工作原理。
同时通过运用Matlab/simulink系统对异步电机转速调节进行了开环闭环的仿真。
本论文对电机转矩转速观察为开环系统,但是在闭环系统中通过使用Matlab/simulink对系统闭环进行设计仿真,实现了调速,并观察到了电机转速、转矩改变的图像,并且分析了解了异步电机转速改变的原因和仿真过程中的条件等。
关键词Matlab 异步电机变频调速仿真Abstract:With the development of power electronics, the advantage of the variable frequency speed in asynchronous machine is compared with the DC motor , it is more widely used.The principle of asynchronous machine and its way of speed governing is main discussed in this paper. The speed of electrical motor is changed by changing frequency voltage, and numbers of pole-p[airs. This paper is based on changing frequency of the electrical motor, the principle of frequency converter and working theory about PWM(pulse width modulation)is also presented. The open-loop and closed-loop simulation of speed governing with asynchronous machine is achieved through the use of Matlab/simulink system.The observation to electrical motor speed and torque in this paper is the open-loop system, in a closed-loop system, Matlab/simulink is used to design and similated the closed-loop system speed changing is realized, the changing plot of speed and torque about the electrical motor and observed the changing image of torque and the speed about the electrical motor, is observed. the reason why asynchronous machine speed changes and parameters a selection of call the component during the simulation are analyzed.Understanding of the principle of the induction motor and speed control methods, there are three main methods Speed: (1) changing the frequency, (2) change to slip (3) changes the very few. This paper has taken to change the frequency of the ways to achieve the purpose of speed. At the same time also understand the principle of the inverter, and its scope of application.Key words Matlab asynchronous machine Frequency Control Simulation目录第一章绪论 (1)第一节电气传动技术的发展概况 (1)第二节普通交流异步电动机变频调速调速范围的问题 (2)第三节交流异步电动机的调速方式 (3)一、转子回路串电阻或阻抗调速 (3)二、定子调压调速 (3)三、串级调速 (4)四、变极调速 (4)五、变频调速 (4)第四节关于matlab仿真的相关内容 (5)第二章异步电机运行基本原理及其调速方法以及变量控制 (6)第一节异步电机运行基本原理 (6)第二节异步电机的电压方程和等效电路 (6)第三节异步电机的功率方程和转矩方程 (8)第四节异步电机的调速方法 (10)一、变极调速 (10)二、变频变压调速 (11)三、改变转差率来调速 (12)第三章逆变器工作原理和控制及其应用 (14)第一节变频器的工作原理 (14)第二节变频器控制方式 (14)一、正弦脉宽调制(SPWM)控制方式 (15)二、电压空间矢量(SVPWM)控制方式 (15)三、矢量控制(VC)方式 (16)四、直接转矩控制(DTC)方式 (16)五、矩阵式交—交控制方式 (16)第三节简单的三种变频器控制方式 (17)第四节变频器的实际应用 (18)第五节正弦波脉宽调制(SPWM)变频器 (19)一、 SPWM变频器的工作原理 (20)二、 SPWM变频器的同步调制和异步调制 (21)第四章 MATLAB基于VVVF对异步电机的调速仿真实现 (24)第一节关于Matlab软件的应用与操作 (25)一、 PWM模块的组成与仿真 (25)二、电机模块的仿真 (27)三、输出观察模块的仿真 (29)第二节开环调速系统仿真 (30)第三节闭环调速系统仿真 (35)一、闭环调速Matlab仿真主模块 (36)二、控制环节模块 (37)三、仿真结果 (41)总结和展望 (46)参考文献 (48)第一章绪论异步电机的工作原理?异步电机调速又是怎么样的呢?目前主要引用在那几个领域呢?以及异步电机的仿真又是什么呢?又是怎么去仿真的呢?对这些问题的初步说明将是这篇论文所要叙述的。
基于Matlab的异步电动机故障运行状态的仿真
基于Matlab的异步电动机故障运行状态的仿真郝晓红;王慧敏【摘要】为了探讨异步电动机的故障运行状态,利用Matlab/Simulink仿真工具中丰富的电机及相关测控模块,结合多回路理论,建立了简易转子断条电机故障仿真模型及三相供电电压不对称时异步电动机运行状态仿真模型,并分析了电机各种运行状态下的定子电流、转速及转矩.同时针对不同故障,采用不同的特征量进行分析.主要包括当电机转子断条时,对电机定子电流进行频谱分析;当电机的三相供电电压不对称时,对不同三相电压不平衡度下的定子电流负序分量进行计算.仿真计算结果表明,频谱分析方法可有效应用于电机转子断条故障的诊断;定子电流负序分量可应用于三相供电电压不平衡的诊断.%For discussing the faulty running states of asynchronous motor,using abundant motor and measurement model in Matlab/Simulink,based on multi-loop motor model,a simulation modeling of simple broken rotor bars and an unbalanced voltage supply on asynchronous motor's operating is introduced to analyze stator current,speed and torque of the motor under various running states.At the same time,different faults with different featured portions are analyzed.The faults and portions include that the motor rotor breaks bars,stator current spectrum is needed to analyze,voltage supply on an asynchronous motor is unbalanced,the stator current's negative sequence component is needed to analyze.The results show that the spectral analysis method can be applied to the fault diagnosis of broken rotor bars,and stator current negative sequence component presence can be applied to diagnose unbalanced voltage supply.【期刊名称】《实验室研究与探索》【年(卷),期】2017(036)002【总页数】4页(P98-101)【关键词】异步电动机;转子断条;三相电压不对称;故障诊断【作者】郝晓红;王慧敏【作者单位】电子科技大学机械电子工程学院,成都611731;电子科技大学机械电子工程学院,成都611731【正文语种】中文【中图分类】TM343三相交流异步电动机是应用最为广泛的一种电气设备,在电力系统中的用电量占整个系统总用电量的60%以上。
基于MATLAB的异步电动机仿真
基于MATLAB的异步电动机仿真目录1 引言 (1)2 异步电动机动态数学模型 (2)2.1异步电动机动态数学模型的性质 (2)2.2三相异步电动机的多变量非线性数学模型 (2)2.2.1电压方程 (3)2.2.2磁链方程 (4)2.2.3转矩方程 (6)2.2.4电力拖动系统运动方程 (7)2.2.5三相异步电机的数学模型 (8)3 坐标变化和变换矩阵 (9)3.1三相--两相变换(3/2变换) (9)3.2三相异步电动机在两相坐标系上的数学模型 (10)3.2.1三相异步电动机在两相坐标系上的状态方程 (11)3.2.2两相静止坐标系中按定子磁链定向的状态方程 (11)4 软件介绍及模型实现 (13)4.1 Matlab/Simulink简介 (13)4.2模型实现 (13)4.2.1 Simulink模型设计 (13)4.2.2模型参数设置 (15)4.2.3仿真结果 (18)5 结论 (21)参考文献 (22)1 引言1985年,由Depenbrock教授提出的直接转距控制理论将运动控制的发展向前推进了一大步。
接着1987年把它又推广到弱磁调速范围。
不同于矢量控制技术,它无需将交流电动机与直流电动机作比较、等效和转化,不需要模仿直流电动机的控制,也不需要为解耦而简化交流电动机的数学模型[1]。
它只是在定子坐标系下分析交流电机的数学模型,强调对电机的转距进行直接控制,省掉了矢量旋转变换等复杂的变换与计算。
直接转距控制从一诞生,就以新颖的控制思想,简洁明了的系统结构,优良的静、动态性能受到人们的普遍关注。
系统建模与仿真一直是各领域研究、分析和设计各种复杂系统的有力工具。
建模可以超越理想的去模拟复杂的现实物理系统;而仿真则可以对照比较各种控制策略和方案,优化并确定系统参数。
长期以来,仿真领域的研究重点是放在仿真模型建立这一环节上,即在系统模型建立以后,设计一种算法,以使系统模型为计算机所接受,然后再将其编制成计算机程序,并在计算机上运行。
基于MatlabSimulink的异步电机矢量控制系统仿真

基于Matlab/Simulink 的异步电机矢量控制系统仿真摘要在异步电机的数学模型分析中以及矢量控制系统的基础之上,利用Matlab/Simulink运用建立模块的思想分别组建了坐标变换模块、PI调节模块、转子磁链个观测模块、SVPWM等模块,然后将这些模块有机的结合,最后构成了异步电动机矢量控制的仿真模块,并且进行了仿真验证。
仿真结果分别显示了电机空载与负载情况下转矩、转速的动态变化曲线,验证了该方法的有效性、实用性,为电机在实际使用中打下了坚实的基础。
本文主要研究异步电机在矢量控制下的仿真。
使用Matlab/Simulink中的电气系统模块(PowerSystem Blocksets)将其重组得到新的模型并对其仿真,最后分析仿真结果得出结论。
关键词: 异步电机矢量控制 MATLAB/SIMULINK 变频调速目录摘要 (I)Abstract......................................................................................... 错误!未定义书签。
1 绪论 (1)1.1 电机及电力拖动技术的发展概况 (1)1.2 异步电动机的控制技术现状................................................. 错误!未定义书签。
1.3 仿真软件的简介及其选择..................................................... 错误!未定义书签。
1.4 论文的主要内容及结构安排................................................. 错误!未定义书签。
2 异步电动机的数学模型 (4)2.1 异步电动机的稳态数学模型 (4)2.2 异步电动机的动态数学模型 (5)2.3 本章小结 (7)3 矢量控制系统基本思路 (8)3.1 矢量控制的基本原理 (8)3.2 坐标变换 (9)3.3SVPWM调制 (21)3.3本章小结 (11)4 异步电机矢量控制系统仿真 (14)4.1矢量控制系统模型 (14)4.2仿真结果与分析 (15)4.5本章小结 (17)5结论与展望 (18)5.1结论 (18)5.2后续研究工作的展望 (19)参考文献 ....................................................................................... 错误!未定义书签。
基于MATLAB的异步电机变频调速系统的仿真与分析
基于MATLAB的异步电机变频调速系统的仿真与分析摘要:本文利用MATLAB软件对异步电机变频调速系统进行仿真与分析,通过建立模型、设计控制策略和进行性能评估,探讨了异步电机的调速系统在不同工况下的动态特性。
通过仿真分析,可以更好地理解异步电机的变频调速系统的工作原理和特性,并为实际应用提供理论参考。
一、引言异步电机是工业生产中常见的电动机之一,其主要应用在风机、水泵、输送带等设备中。
传统的异步电机是由交流电源直接供电,转速固定。
为了满足不同工况下的需求,提高系统的控制性能,现在常常采用变频调速技术来实现异步电机的调速。
变频调速系统可以通过改变电机的输入频率,来调节电机的转速和输出功率,实现对系统的精准控制。
二、异步电机变频调速系统的建模1. 异步电机的数学模型异步电机可以理解为一个轴对称的旋转电机,其运动方程可以简化为以下形式:\[T_{\text {电 }}=T_{\text {m机 }}-T_{\text {负载 }}-T_{\text {摩擦阻力 }}=J \cdot \frac{d \omega}{d t}\]T电表示电机的电磁转矩,Tm机表示电机的机械转矩,T负载表示负载转矩,T摩擦阻力表示摩擦转矩,J表示转动惯量,ω表示电机的角速度。
2. 变频调速系统的控制策略变频调速系统的控制策略一般包括速度闭环控制和电流矢量控制两部分。
速度闭环控制采用PID控制器,通过测量电机转速与给定转速进行比较,调节输出电压的频率和幅值,使电机实现闭环控制。
电流矢量控制则是根据电机的电流矢量和磁链方向,控制电机的输出电压和频率,实现对电机的精准控制。
3. 系统的建模与仿真为了进行仿真分析,需要建立异步电机变频调速系统的数学模型。
在MATLAB中,可以使用Simulink工具箱来进行建模。
通过搭建电机模型、控制算法和运动方程,可以建立完整的系统模型,并进行仿真实验。
三、仿真与分析1. 建立异步电机的模型需要建立异步电机的数学模型,并在Simulink中进行搭建。
基于MATLAB的异步电机矢量控制调速系统仿真

宁波大学答题纸(20 13 —20 14 学年第 1 学期)课号: 101G08EA1 课程名称:MATLAB 应用技术 改卷教师: 朱莹 学号: 116040069 姓 名: 覃坤勇 得 分:基于MATLAB/SIMULINK 的异步电机矢量控制调速系统仿真1基本要求在分析异步电机的动态数学模型及矢量控制原理的基础上,利用Matlab/Simulink ,采用模块化的思想分别建立了电流控制型变频器模块、异步电机矢量变换模型、电流滞环PWM 控制模块、以及电流控制观察、速度调节等模块,再进行功能模块的有机整合,构成了交流异步电机矢量控制系统,并进行了仿真试验。
2 理论基础感应电机的数学模型是一高阶、非线性、强耦合的多变量系统,为便于研究,通常通过坐标变换使之简化。
根据交流电机理论,在忽略空间谐波、磁饱和、铁损以及频率和温度变化对绕组的影响的情况下,经过坐标变换,三相交流感应电动机在d-q 坐标系下的数学模型可用如下方程描述:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∙⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++--+=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡2211221111111100000t m t m r s m s r m m m S Sm m SS t m i i i i R L L p L R p L p L L p L R L L p L L p L R u u ωωωωωω (1) 式中,S L ,r L 分别为定子和转子的自感;1R ,2R 分别为定子和转子的电阻; m L 为定转子间的互感。
异步电机矢量控制中,被控的是定子电流因此,需要推导出定子电流分量和其他物理量的关系。
磁链方程如下:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∙⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡221122110000000q d q d r mr m m S m Sq d q d i i i i L L L L L L L L ψψψψ (2)2211ψm m L p T i +=(3) 式中,2T 为转子励磁时间常数,即 22R L T r=。
基于MATLAB的三相鼠笼式交流异步电动机制动仿真
基于MATLAB的三相鼠笼式交流异步电动机制动仿真
三相鼠笼式交流异步电动机是一种常见的工业电动机,具有结构简单、运行可靠、接线便捷等特点。
为了更好地了解鼠笼式交流异步电动机的制
动过程,可以使用MATLAB软件进行仿真研究。
首先,我们需要建立鼠笼式交流异步电动机的数学模型。
这个模型是
基于电动机的物理特性和电路等参数建立的,可以描述电动机的运行情况。
通常,鼠笼式交流异步电动机的数学模型可以分为电磁部分和机械部分两
部分。
在电磁部分,我们可以利用磁动势方程描述电动机的电磁特性。
首先,我们可以根据电动机的电路参数计算出定子电压、电流和电动势等相关参数。
然后,根据电动势方程,我们可以计算出电动机的磁链和电磁转矩。
在机械部分,我们可以利用转矩方程描述电动机的机械特性。
根据载
荷特性和电动机的转速、转矩、惯性等参数,我们可以计算出电动机的机
械转矩和转速。
在建立了鼠笼式交流异步电动机的数学模型之后,我们可以使用MATLAB软件进行仿真研究。
根据实际需求,我们可以设置不同的仿真条
件和参数,如电机参数、工作状态、负载特性等。
然后,我们可以运行仿
真程序,得到电动机在不同工况下的运行情况和性能指标。
通过仿真研究,我们可以得到电动机的速度-转矩特性曲线、电流-转
矩特性曲线、功率-转矩特性曲线等数据,从而更好地理解电动机的工作
原理和性能。
总之,基于MATLAB的三相鼠笼式交流异步电动机制动仿真可以帮助研究人员深入了解电动机的运行特性和性能,提供了一种快捷有效的研究方法。
同时,这种仿真方法也可以用于电动机的设计优化和性能改进。
基于MATLAB的异步电机变频调速系统的仿真与分析

基于MATLAB的异步电机变频调速系统的仿真与分析1. 引言1.1 研究背景异步电机是一种常见的电动机类型,在工业和家用电器中广泛应用。
随着电力系统的发展和电动机技术的进步,对异步电机的变频调速系统进行研究已成为一个热门领域。
变频调速系统可以根据实际需要调整电机转速,实现节能、精准控制和适应不同工况需求的目的。
随着现代工业的自动化程度不断提高,对电机的调速要求也越来越高。
传统的电压调速和机械调速方式已经无法满足实际需求,因此异步电机变频调速系统逐渐成为工业界的主流选择。
在此背景下,研究基于MATLAB的异步电机变频调速系统的仿真与分析具有重要意义。
通过对异步电机原理、变频调速系统设计和MATLAB仿真模型搭建等方面的研究,可以更好地了解和掌握这一技术,为实际应用提供理论支持和指导。
本文将对异步电机变频调速系统进行深入探讨,旨在为相关领域的研究和应用提供有益的参考和借鉴。
1.2 研究意义异步电机是工业中常用的电动机之一,其性能直接影响到生产效率和能源消耗。
变频调速系统能够实现电机转速控制,提高电机的运行稳定性和效率,减少能耗,降低维护成本。
基于MATLAB的异步电机变频调速系统的仿真与分析具有重要的研究意义。
通过仿真可以快速、灵活地模拟电机的工作情况,预测电机在不同工况下的性能表现,为设计和优化电机调速系统提供有力的依据。
通过仿真分析可以深入了解变频调速系统在不同参数和工况下的工作特性,为实际应用中的系统调试和优化提供指导。
对异步电机变频调速系统的研究可以推动电机控制技术的发展,促进工业生产的智能化和节能化,具有重要的社会和经济意义。
基于MATLAB的异步电机变频调速系统的仿真与分析不仅具有理论研究意义,还具有实际应用价值,对推动电机控制技术的发展和提高工业生产效率具有重要意义。
1.3 研究目的研究目的是为了探讨基于MATLAB的异步电机变频调速系统的仿真与分析,从而更深入地了解异步电机的工作原理和变频调速系统的设计方法。
基于Matlab的异步电动机矢量控制系统的仿真研究
基于Matlab的异步电动机矢量控制系统的仿真研究交流调速系统、仿真建模、矢量控制1 引言交流调速技术在工业领域的各个方面应用很广,对于提高电力传动系统的性能有着重要的意义,由于电力传动系统的复杂性和被控对象的特殊性,使得对它的建模与仿真一直是研究的热点。
对其仿真研究不能像控制系统那样可用各环节简化传递函数来表示,这样会有很多重要环节被忽略,完全体现不了交流调速系统的整体结构和各个环节点上的信号状态。
对电气传动系统的建模仿真力求达到与实际系统相一致,MATLAB提供的SIMULINK中的电力系统工具箱(Powerlib)能很好地满足这一要求。
以往对电气传动系统的仿真研究主要集中在电机的建模和仿真[4][5],最近,许多对复杂电力传动系统的建模仿真方法已提出,主要有运用仿真工具箱对电力传动系统建模仿真[7]和将电力传动系统的功能单元模块化的仿真建模[3]。
这些方法都是在Matlab/Simulink环境下,结合电力系统工具箱对复杂电力传动系统建模仿真,但是没有分析Powerlib运行原理。
状态空间分析方法对于电力传动系统的建模仿真是一种方便有效的方法,它被成功地应用到Powerlib中,能够完成复杂电力传动系统的建模仿真,并且能够方便的进行波形分析和控制参数的调节。
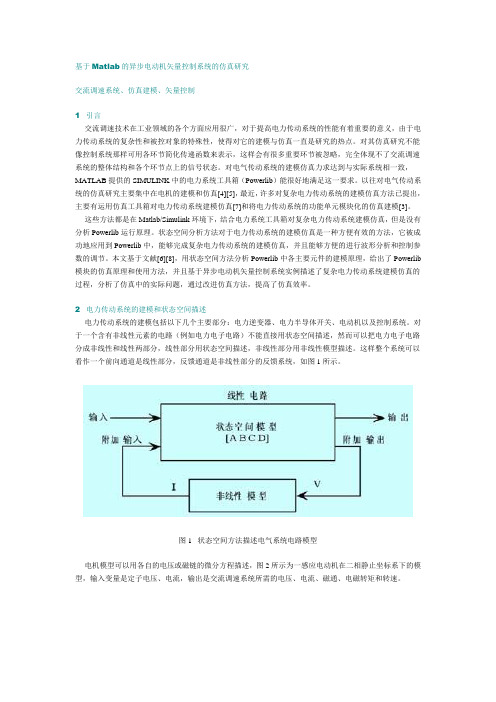
本文基于文献[6][8],用状态空间方法分析Powerlib中各主要元件的建模原理,给出了Powerlib 模块的仿真原理和使用方法,并且基于异步电动机矢量控制系统实例描述了复杂电力传动系统建模仿真的过程,分析了仿真中的实际问题,通过改进仿真方法,提高了仿真效率。
2 电力传动系统的建模和状态空间描述电力传动系统的建模包括以下几个主要部分:电力逆变器、电力半导体开关、电动机以及控制系统。
对于一个含有非线性元素的电路(例如电力电子电路)不能直接用状态空间描述,然而可以把电力电子电路分成非线性和线性两部分,线性部分用状态空间描述,非线性部分用非线性模型描述。
基于MATlab异步电机故障诊断仿真分析
基于MATlab异步电机故障诊断仿真分析异步电机是工业中常用的一种电机,其故障诊断对于提高设备可靠性和延长使用寿命非常重要。
MATLAB是一种功能强大的数学计算软件,可以用于电机故障仿真分析。
本文将基于MATLAB对异步电机的故障诊断进行仿真分析。
首先,我们需要建立一个异步电机的数学模型。
异步电机的数学模型可以用于对电机进行仿真和分析。
在MATLAB中,我们可以使用方程组来表示电机的动态行为,包括转子转速、转矩输出和电流等。
通过建立数学模型,我们可以为不同故障情况下的电机建立仿真模型。
接下来,我们需要考虑不同的电机故障情况。
常见的异步电机故障包括定子绕组故障、转子故障和轴承故障等。
针对不同的故障情况,我们需要修改之前建立的电机数学模型,并进行相应的仿真分析。
例如,对于定子绕组故障,我们可以通过增加定子绕组的电阻和电感等参数来模拟故障情况,并分析电机转速和电流的变化。
在进行仿真分析时,我们可以使用MATLAB的仿真工具箱来进行参数调整和数据分析。
例如,我们可以调整电机的工作条件,如负载、电压和频率等,观察不同故障情况下电机的响应。
同时,我们可以通过添加噪声和干扰来模拟实际工况下的情况,测试故障诊断算法的鲁棒性和准确性。
最后,我们需要对仿真结果进行分析和评估。
通过对电机的转速、电流和振动等参数进行分析,我们可以判断电机是否存在故障,并确定故障的类型和程度。
我们可以基于实验数据和经验知识,开发故障诊断算法来自动识别和判断电机故障。
通过对仿真结果的评估和比较,我们可以进一步优化算法,并提高故障诊断的准确性和可靠性。
综上所述,基于MATLAB的异步电机故障诊断仿真分析可以帮助我们理解电机的动态行为和故障机制,并优化故障诊断算法。
通过建立电机数学模型、模拟不同故障情况并进行仿真分析,我们可以准确、快速地诊断电机故障,提高设备可靠性和工作效率。
基于MATLAB的三相异步电动机的建模与仿真研究
《基于MATLAB的三相异步电动机的建模与仿真研究》工作特性,然后对基于基于MATLAB的三相异步电动机的建模与仿真进行了重点分析,以供广大读者参考。
【关键词】MATLAB 三相异步电动机建模仿真1 MATLAB简介MATLAB是矩阵实验室(Matrix Laboratory)的简称,可以为三相异步电动机提供数值计算能力、专业水平的符号计算功能、可视化建模和仿真等功能。
矩阵是MATLAB的基本数据单位,其指令表达形式类似于数学和工程中用到的,所以相比较C语言而言,MATLAB的结算问题能力更便捷。
目前的MATLAB包含了数百种以上的内部函数主包和三十多种工具包,后者又可以分为学科工具包和功能性工具包,从而实现处理可视化建模仿真、实时控制、文字处理等各项功能。
MATLAB还有着很强的开放性,其内部的主包和工具包都属于可读可修改文件,从而方便用户将源程序的修改加入到自己编写的程序中。
2 异步电动机基本原理和工作特性三相异步电动机主要由定子和转子构成,二者之间有一个比较小的空气隙。
当对称三相绕组接到对称三相电源以后,空气隙就可以建立同步转速和旋转磁场。
旋转磁场会切割转子导体,而后者就会产生感应电势,再加上转子绕组属于闭合状态,所以电流会从转子导体中通过。
电流和旋转磁场之间会产生电磁力,并作用于转子导体,其方向与旋转磁场方向保持一致。
异步电动机工作特性是指在额定电压和额定频率的情况下,电动机转速、定子电流、功率因数、电磁转矩等方面的关系。
首先从转速特性方面来看,在空载状态下,转子电流接近零,所以处于同步转速状态下,而随着负载的增加,转速会逐渐下降,因此转速特征是一条稍向下倾斜的曲线。
其次从定子电流特性方面来分析,如果处于空载状态下,定子电流就全部是励磁电流;并且随着负载的增加,定子电流也会增加。
最后从功率因数特性的方面来看,异步电动机的功率因数处于滞后状态,如果处于空载情况下,电动机的功能因素就比较低;随着负载的增加,电动机的功率因数也会提高,直到额定负载状态下会达到最大值。
基于MATLAB的异步电动机调速系统设计与仿真 (修改稿)

电能是人们日常生产生活不或缺的能源,并且在生活被浪费最多的能源也是电能,因此,充分有效利用电能并节省电力尤为重要,隐藏着非常巨大的技术发展空间。立足于节省控制能量这一方面,节省电动机控制能量扮演了一个非常重要的角色。各种类型的电动机是电能主要的使用者和生产者,我国电动机的年耗电量占了工业用电总量的80%以上。在电动机的运行维护过程中,功率电动机控制的效率很低,并且在其使用的过程中严重地浪费了大量的功率。近年来,我国在电机节能控制方面的投资增加,就是因为有巨大的潜力存在于电机调速的市场。
关于评价交流调速技术的优劣,不同的需求有不同的标准。但普遍的共识是:(1)工作效率不能低;(2)调速平滑即无级调速;(3)调速范围要大;(4)调速产生的负面影响(如谐波、功率因数等)小;(5)成本不能太高。[10]
在对交流旋转速度的调整控制系统中,变频系统的调速技术是最佳且最稳定的交流旋转速度调整控制系统性能。对变频系统调速控制技术的开发与研究应用是目前在电机控制领域最有发展希望且实用的技术研究工作。用于控制交流频率的转换器完全可以是一整个的变频控制系统,频率变换行业的整个市场的发展潜力非常大。这里所说的"频率变换行业"不仅局限于交流频率变换器本身,还广泛地涵盖了与交流频率变换器系统控制技术密切相关的所有领域和行业。如交流速度的调整控制系统及系统控制、电力电子重要部件的控制系统驱动与安全保护、相关集成电路的批量生产与工业技术应用等。
基于Matlab异步电动机矢量控制系统的仿真

基于Matlab转差频率控制的矢量控制系统的仿真概述:常用的电机变频调速控制方法有电压频率协调控制(即v/F比为常数)、转差频率控制、矢量控制以及直接转矩控制等。
其中,矢量控制是目前交流电动机较先进的一种控制方式。
它又有基于转差频率控制的、无速度传感器和有速度传感器等多种矢量控制方式。
其中基于转差频率控制的矢量控制方式是在进行U /f恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对输出频率f进行控制的。
采用这种控制方法可以使调速系统消除动态过程中转矩电流的波动,从而在一定程度上改善了系统的静态和动态性能,同时它又具有比其它矢量控制方法简便、结构简单、控制精度高等特点。
Simulink仿真系统是Matlab最重要的组件之一,系统提供了标准的模型库,能够帮助用户在此基础上创建新的模型库,描述、模拟、评价和细化系统,从而达到系统分析的目的。
在此利用Matlab/Simulink软件构建了转差频率矢量控制的异步电机调速系统仿真模型,并对此仿真模型进行了实验分析。
矢量控制是目前交流电动机的先进控制方式,一般将含有矢量交换的交流电动机控制都称为矢量控制,实际上只有建立在等效直流电动机模型上,并按转子磁场准确定向地控制,电动机才能获得最优的动态性能。
转差频率矢量控制系统结构简单且易于实现,控制精度高,具有良好的控制性能、因此,早起的矢量控制通用变频器上采用基于转差频率控制的矢量控制方式。
基于此,本文在Mtalab/Simulink环境下对转差频率矢量控制系统进行了仿真研究。
1转差频率矢量控制系统由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
转差频率矢量控制是按转子磁链定向的间接矢量控制系统,不需要进行复杂的磁通检测和繁琐的坐标变换,只要在保证转子磁链大小不变的前提下,通过检测定子电流和旋转磁场角速度,通过两相同步旋转坐标系(M-T坐标系)上的数学模型运算就可以实现间接的磁场定向控制。
基于Matlab交流异步电机矢量控制系统的仿真建模

内容摘要
希望本次演示的内容能为广大读者提供有益的参考和启示,也期待着未来研 究的新成果和新方向。
谢谢观看
未来研究方向
未来研究方向
交流异步电机矢量控制技术已经在许多领域得到了广泛应用,但仍然存在许 多有待研究和改进的地方。例如,如何进一步提高控制系统的响应速度和稳态精 度,如何解决矢量控制中的参数摄动和非线性问题,以及如何实现更为复杂的多 电机协调控制等问题,都是今后需要深入研究的方向。随着、物联网等新技术的 不断发展,也为交流异步电机矢量控制系统的研究与应用提供了新的机遇与挑战。
参考内容
交流电机矢量控制系统建模与仿 真
交流电机矢量控制系统建模与仿真
随着电力电子技术和控制理论的不断发展,交流电机矢量控制系统在工业应 用中越来越受到。本次演示将介绍基于MatlabSimulink的交流电机矢量控制系统 建模与仿真的方法和步骤。
一、交流电机矢量控制系统建模
一、交流电机矢量控制系统建模
基于Matlab交流异步电机矢量 控制系统的仿真建模
01 引言
03 仿真建模
目录
02 原理分析 04 实验验证
05 结论
07 参考内容
目录
06 未来研究断发展,交流异步电机矢量控制技术在许 多领域得到了广泛应用。这种控制技术通过将交流电机的定子电流分解为直轴和 交轴两个分量,分别进行控制,从而实现类似直流电机的控制效果。Matlab作为 一种强大的仿真和计算工具,为交流异步电机矢量控制系统的研究和设计提供了 便捷的平台。本次演示将介绍如何使用Matlab对交流异步电机矢量控制系统进行 仿真建模,并通过实验验证其有效性。
三、结论与展望
三、结论与展望
本次演示介绍了基于MatlabSimulink的交流电机矢量控制系统建模与仿真的 方法和步骤。首先,了解了交流电机的基本结构和工作原理;其次,建立了电压、 电流、转矩和位置等变量的模型,并借助MatlabSimulink搭建了系统模型;最后, 进行了系统仿真和数据分析。通过对比实测数据和仿真结果,验证了模型的准确 性,并得出了系统性能的结论。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程报告COURSE REPORT课程名称: ——课程号: ——授课教师:——学号:——姓名:西木小卒所属:上大桂树林基于MATLAB的异步电动机仿真1.电机仿真模型一台三相六机鼠笼式异步电动机,定子绕组为Y型连接,额定电压为U N=380V,额定转速n N=975r/min,电源频率f1=50Hz,定子电阻R1=2.08Ω,定子漏电抗X1=3.12Ω,转子电阻折合值R2、=1.53Ω,转子漏电抗折合值X2、=4.25Ω。
要求:绘制以上参数电动机的固有机械特性曲线、定子串电阻人为特性曲线、电子串电抗人为特性曲线、转子串电阻人为特性曲线、降电压人为特性曲线;给出仿真源代码。
2. 仿真代码实现clcclearm1=3;%%电机相数U1=220;%%额定定子相电压n1=[-1000,1000];%%两个相的同步转速,+为规定正相,-为反相p=3;%%电机极对数f1=50;%%输入电流频率r1=2.08;%%定子侧电阻r2=1.53;%%转子侧电阻折合值w1=2*pi*f1/p;%%电机同步角速度x1=3.12;%%定子侧电抗x2=4.25;%%转子侧折合电抗s=-1:0.001:1;%%设定转差率,是画图的关键自变量ns=[-1,1];%用来标定转矩的方向,规定ns=1为正,-1为反%%绘制定子串电阻前的固有机械特性曲线figure(1);for i=1:length(n1);n=n1(i)*(1-s);%%计算转速T=ns(i)*(m1*p*U1^2*r2)./s./(w1.*((r1+r2./s).^2+(x1+x2)^2));%%计算转矩plot(T,n,'--');if i==1text(max(T),800,strcat('r1=',num2str(r1),'\Omega'),'FontSize',9,'Color','black');%%曲线标注位置设置,每条曲线的标注横轴上对齐其Tm以便于区分,纵坐标无严格限制endhold on;endxlabel('电磁转矩{\itT}/(N\cdotm)');ylabel('转速{\itn}/(r/min)');title('定子串电阻的机械特性曲线')grid on;hold on;%%绘制定子串电阻人为机械特性曲线r1p=r1;str_y=800;for i=1:length(n1);%%绘制正反相序的波形图,n=n1(i).*(1-s);for coef=1:3%%三条人为曲线r1p=r1p+1;%%串电阻的步进值T1=ns(i)*(m1*p*U1^2*r2)./s./(w1.*((r1p+r2./s).^2+(x1+x2)^2));plot(T1,n,'k-');hold on;if i==1str=strcat('r1=',num2str(int16(r1p)),'\Omega');str_y=str_y-150;text(max(T1),str_y,strcat('r1=',num2str(r1p),'\Omega'),'FontSize',9,'Color','black');endendend%%绘制降电压前的固有机械特性曲线figure(2);for i=1:length(n1);n=n1(i)*(1-s);T=ns(i)*(m1*p*U1^2*r2)./s./(w1.*((r1+r2./s).^2+(x1+x2)^2));plot(T,n,'--');if i==1text(max(T),800,strcat('U1=',num2str(int16(U1)),'V'),'FontSize',9,'Color','black');endhold on;endxlabel('电磁转矩{\itT}/(N\cdotm)');ylabel('转速{\itn}/(r/min)');title('降低定子电压的机械特性曲线')grid on;hold on;%%绘制降电压人为机械特性曲线str_y=800;for i=1:length(n1);n=n1(i).*(1-s);for coef=0.75:-0.25:0.25;U1p=U1*coef;T1=ns(i)*(m1*p*U1p^2*r2)./s./(w1.*((r1+r2./s).^2+(x1+x2)^2));plot(T1,n,'k-');if i==1str=strcat('U1=',num2str(int16(U1p)),'V');str_y=str_y-150;text(max(T1),str_y,str,'FontSize',9,'Color','black');endhold on;endend%%绘制定子串电抗前的固有机械特性曲线figure(3);for i=1:length(n1);n=n1(i)*(1-s);T=ns(i)*(m1*p*U1^2*r2)./s./(w1.*((r1+r2./s).^2+(x1+x2)^2));plot(T,n,'--');if i==1text(max(T),800,strcat('x1=',num2str(x1),'\Omega'),'FontSize',9,'Color','black');endhold on;endxlabel('电磁转矩{\itT}/(N\cdotm)');ylabel('转速{\itn}/(r/min)');title('定子串电抗的机械特性曲线')grid on;hold on;%%绘制定子串电抗的人为机械特性曲线x1p=x1;str_y=800;for i=1:length(n1);n=n1(i).*(1-s);for coef=1:3x1p=x1p+1.0;T1=ns(i)*(m1*p*U1^2*r2)./s./(w1.*((r1+r2./s).^2+(x1p+x2)^2));plot(T1,n,'k-');if i==1str=strcat('x1=',num2str(x1p),'\Omega');str_y=str_y-150;text(max(T1),str_y,strcat('x1=',num2str(x1p),'\Omega'),'FontSize',9,'Color','black');endhold on;endend%%绘制转子串电阻前的固有机械特性曲线figure(4);for i=1:length(n1);n=n1(i)*(1-s);T=ns(i)*(m1*p*U1^2*r2)./s./(w1.*((r1+r2./s).^2+(x1+x2)^2));plot(T,n,'--');if i==1text(max(T),800,strcat('r2=',num2str(r2),'\Omega'),'FontSize',9,'Color','black');endhold on;endxlabel('电磁转矩{\itT}/(N\cdotm)');ylabel('转速{\itn}/(r/min)');title('转子串电阻的机械特性曲线')grid on;hold on;%%绘制转子串电阻的人为机械特性曲线r2p=r2;str_y=800;for i=1:length(n1);n=n1(i).*(1-s);for coef=1:3r2p=r2p+0.75;T1=ns(i)*(m1*p*U1^2*r2p)./s./(w1.*((r1+r2p./s).^2+(x1+x2)^2));plot(T1,n,'k-');if i==1str=strcat('r2=',num2str(r2p),'\Omega');str_y=str_y-150;text(max(T),str_y,str,'FontSize',9,'Color','black');endhold on;endend3.仿真波形。