零度YS-X4-X4P-GEMINI-M-S PC版旋翼地面站用户手册V1.0
OSD产品说明书_V1.0(1)
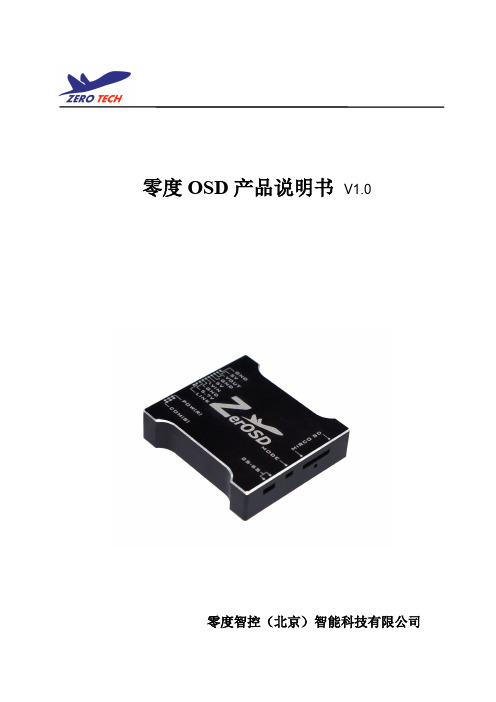
零度OSD产品说明书V1.0零度智控(北京)智能科技有限公司产品简介零度OSD是零度智控(北京)智能科技有限公司(注:以下简称零度)为多旋翼爱好者、航拍从业者推出的多轴飞行器配套产品。
该产品适用于零度全系列飞行控制器,能够在视频中实时叠加飞行参数,帮助飞行器操控者及时掌握机体相关数据并完成高质量的飞行,带来更为人性化的操控体验。
该产品外形美观,质量轻盈,材质坚固。
设备图解1图传发射机电源及A V信号线,可用于给图传发射机提供5V电压。
红线为电源正极,黑线为电源负极,白线为AV信号输出。
2摄像头电源及A V信号线,可用于给摄像头提供5V电压。
红线为电源正极,黑线为电源负极,白线为AV信号输入。
3Wifi(电台)电源线,可用于给Wifi电台提供5V电压。
红线为电源正极,黑线为电源负极。
4串口数据输出线,该线连接Wifi(电台)数据输入口。
5串口数据输入线,该线连接飞控串口数据输出口。
6OSD主电源线,该线连接飞行器主电源,兼容2S~6S电池。
7模式切换按键及模式指示灯。
8Micro-SD卡插槽使用方法一、屏幕叠加画面图解1兴趣范围半径(单位:M)2飞行时间3电压报警,无符号显示为无报警;符号闪烁为一级报警,符号常规显示为电压二级报警。
4内存卡状态指示,无符号显示为已插入内存卡;符号常规显示为未检测到内存卡。
5串口状态指示,用于指示OSD与飞控之间串口连接状态,符号闪烁为串口数据异常,无符号显示为串口数据正常。
6实际油门舵量指示,游标表示飞控实际输出油门控制量,标尺底部为游标零点,标尺旁数值表示油门具体数据。
7返航指示符,当机尾对准起飞点时,返航指示符位于十字标竖线正下方,同时返航指示符由小三角变为大三角符号,此时遥控器收杆飞行器将朝起飞点所在方向移动;机尾方向较起飞点偏移越大,返航指示符偏离十字标竖线越远。
此处起飞点指飞行器上电后获取6颗GPS卫星时飞行器所在地点。
(该功能只在GPS模式下且存在有效GPS坐标时有效)8已设置的航点数量9当前目标航点序号10飞行器水平速度(单位:KM/h)11飞行器距起飞点高度(单位:M)12保留13飞行器距起飞点水平距离(单位:M)14动力电流值(单位:A)15当前GPS卫星数量16晃动系数17震动系数18飞行器俯仰角指示符19飞行器横滚角指示符20飞行器升降状态指示,箭头向上表示飞行器处于拔高状态,箭头向下表示飞行器处于拉低状态,箭头的长度指示拔高或者拉低速度概值。
梦擎导航系统用户手册
Astrob 4.0 导航软件用户手册V 1.1上海梦擎保留在不预先通知的情况下随时修订或更新本文档的权利。
用户手册说明更新,请参见版权声明感谢您使用Astrob4.0导航系统。
在使用此系统之前,请仔细阅读下述版权声明中所列条款。
当您打开包装开始安装使用本系统后,即表示您愿意遵守版权声明中的所有内容。
1. 版权Astrob4.0导航系统包含导航软件与电子地图。
导航软件归上海梦擎信息科技有限公司(Astrob Technology Co., Ltd.)所有,电子地图归易图通科技(北京)有限公司(eMapgo Technologies(Beijing)Co., Ltd)所有, 并受中华人民共和国、国际著作权法保护。
2. 禁止复制本产品含有上海梦擎信息科技有限公司(Astrob Technology Co., Ltd.)的商业机密。
未经授权,任何拷贝及仿冒行为一律严格禁止并视为违法,使用者不得将本系统之软件、电子地图及所附件进行拆解、还原工程、拷贝、转让或用做任何商业用途。
目录1.欢迎使用 (6)1.1安全操作注意事项 (6)1.2导航仪的维护 (7)1.3安装-充电-开机/关机-重新启动 (8)1.4开机主画面功能简介 (11)1.4.1气象信息 (12)1.4.2音乐播放功能 (13)1.4.3图片浏览功能 (16)1.4.4影音播放功能 (17)1.4.5系统设定 (20)1.5A STROB4.0产品规格 (25)1.6简单故障处理 (26)2.A STROB4.0导航系统 (27)2.1首次使用须知 (27)2.2GPS全球卫星定位系统 (28)2.3A STROB4.0功能简介 (29)2.4启动导航系统 (30)2.5主要画面说明 (31)2.5.1自由导航画面 (31)2.5.2主菜单说明 (32)2.5.3路径导航画面 (33)2.5.4丰富的导引地图 (34)2.5.5输入法说明 (35)3.开始导航 (36)3.1查询目的地 (37)3.1.1快捷查询 (37)3.1.2兴趣点查询 (39)3.1.3地址查询 (42)3.1.4历史目的地 (45)3.1.5先前地图 (46)3.1.6附近兴趣点查询 (47)3.1.7电话查询 (49)3.1.8收藏夹 (50)3.2开始导航 (51)4.2导航功能 (54)4.2.1路线信息 (54)4.2.2前方塞车 (55)4.2.3路径重演算 (55)4.2.4日夜地图切换 (55)4.2.5音量&亮度 (56)4.2.6终止导航 (56)4.2.7路径设置 (57)4.3自动重新规划路径 (59)5.网络百宝箱 (60)5.1我的路况 (61)5.2实时路况显示 (61)5.3网络旅游书 (62)5.3车友会 (62)5.5自助导航 (64)6.主菜单其他功能 (65)6.1回家 (65)6.2收藏夹管理 (66)6.3历史目的地管理 (67)6.4个人景点 (68)6.5子菜单 (70)7.系统设置 (72)7.1导航设置 (72)7.2路径设置 (73)7.3地图风格 (73)7.42D/3D (75)7.5行车方向 (75)7.6音量/亮度 (76)7.7日夜切换 (76)7.8车标风格 (76)7.9GPS信息 (77)7.10选择语言 (77)7.11设置家庭住址 (78)7.12TMC设置 (78)7.13恢复默认设置 (78)7.14版本信息 (79)8.2导航语音提示 (81)8.3FA Q (82)8.4A STROB4.0软件、地图升级 (83)1. 欢迎使用使用梦擎导航软件之前,请先详细阅读此手册,并妥善保存手册以作日后参考。
无人直升机操作手册
北京七维航测科技股份有限公司 2015 年 09 月
北京七维航测科技股份有限公司
Beijing SDi Science&Technology Co.,Ltd.
目录
第一章 系统使用注意事项 ................................................................................................. 4 一、警告 ............................................................................................................................ 4 二、飞行注意事项 ........................................................................................................... 4 1、空管 ..................................................................................................................... 4 2、飞行区域 ............................................................................................................. 4 3、电磁环境 ................................................................................
思翼科技 MK32 工业级手持地面站 用户手册 V1.1说明书

MK32工业级手持地面站用户手册V1.12023.10感谢您购买思翼科技的产品。
MK32工业级手持地面站是思翼科技链路产品家族的最新成员,搭载7英寸高清高亮大屏、可扩展至30KM的双路全高清数字图传、4G运存和64G存储的顶级安卓配置,还可选购一机双控、遥控接力等特性,丰富的接口和强大的可扩展性可广泛应用于无人机、无人车船以及智能机器人等领域。
考虑到飞行安全,也为了带给您良好的产品使用体验,请您在装机、飞行前仔细查阅用户手册。
本手册可以帮助您解决大部分的使用疑问,您也可以通过访问思翼科技官方网站()与本产品相关的页面,致电思翼科技官方售后服务中心(400-8382918)或者发送邮件到****************直接向思翼科技工程师咨询产品相关知识以及反馈产品问题。
思翼科技官方QQ群说明书版本更新记录阅读提示 (8)标识、图标 (8)安全 (8)电池 (10)设备闲置、携带、回收 (10)1 产品简介 (12)1.1 产品特性 (12)1.2 部件说明 (14)1.2.1 产品概览 (14)1.2.2 按键、开关类型及通道定义 (16)1.2.3 接口与数据流 (17)1.3 技术参数 (20)1.4 物品清单 (25)1.5 状态指示灯定义 (27)1.5.1 遥控器指示灯定义 (27)1.5.2 天空端指示灯定义 (28)2 使用前 (29)2.1 地面端 (29)2.1.1 开机与关机 (29)2.1.2 充电 (29)2.1.3 充电指示灯定义 (30)2.1.4 切换系统语言 (30)2.2 提升通讯距离与视频流畅性重要说明 (34)2.2.1 使用注意事项 (34)2.2.2 不同飞行距离需求下天线选用以及无线飞行模式设置方法 (34)2.2.3 地面端标准全向天线的安装摆放方式 (35)2.2.4 地面端平板增程天线的安装摆放方式 (36)2.2.5 天空端标准全向天线的安装摆放方式 (37)2.2.6 通讯距离不理想、需要原厂技术支持前所需必要信息 (41)3 “思翼遥控”应用 (43)3.1 通道设置 (44)3.1.1 舵机行程量 (44)3.1.2 中立点调节 (44)3.1.3 舵机反向 (45)3.1.4 通道映射 (45)3.2 数传设置 (47)3.2.1 连接 (47)3.2.2 飞控 (48)3.2.3 串口波特率 (49)3.3 系统设置 (51)3.3.1 对频 (52)3.3.2 多天空端 (52)3.3.3 自适应频点 (53)3.3.4 油门杆类型 (53)3.3.5 第15通道 (54)3.3.6 无线模式 (54)3.3.7 摇杆死区 (55)3.4 链路信息 (56)3.5 失控保护 (57)3.6 按键拨轮设置 (59)3.6.1 按键设置 (59)3.6.2 拨轮设置 (59)3.7 摇杆校准 (61)3.8 拨轮校准 (64)3.9 多机互联 (67)3.9.1 遥控接力 (67)3.9.2 一机双控 (68)3.10 设备信息 (71)3.11 “思翼遥控”更新日志 (72)4 数传 (73)4.1 通过UART串口与安卓地面站通信 (73)4.1.1 极翼飞防管家 (73)4.1.2 博鹰农业 (74)4.1.3 微克智飞 (75)4.2通过USB串口与安卓地面站通信 (77)4.2.1 QGroundControl (77)4.2.2 Mission Planner (78)4.3通过蓝牙与安卓地面站通信 (80)4.3.1 QGroundControl (80)4.2.2 Mission Planner (82)4.4 通过UDP与安卓地面站通信 (84)4.4.1 QGroundControl (84)4.4.2 Mission Planner (85)4.5 通过遥控器Type-C升级接口与Windows地面站通信 (88)4.5.1 QGroundControl (88)4.5.2 Mission Planner (89)4.6 通过UDP经过遥控器WiFi热点与Windows地面站通信 (91)4.6.1 QGroundControl (91)4.6.2 Mission Planner (92)4.7 数传无法连接的解决方法 (95)4.8 数传SDK通讯协议 (97)4.8.1 协议格式说明 (97)4.8.2 通讯命令 (97)4.8.3 通讯接口 (103)4.8.4 SDK CRC16校验代码 (103)5 “SIYI FPV”应用 (107)5.1 设置菜单 (109)5.2 链路信息 (110)5.3 云台相机 (111)5.4 关于SIYI FPV (113)5.5 SIYI FPV应用更新记录 (114)6 图传 (115)6.1 思翼手持地面站配合“SIYI FPV”或思翼QGC(安卓)应用控制思翼光电吊舱/云台相机 (115)6.1.1 准备工作 (115)6.1.2 云台俯仰与平移 (117)6.1.3 变倍 (117)6.1.4 拍照与录像 (117)6.2 接入第三方网口相机或光电吊舱 (119)6.3 接入HDMI相机 (120)6.4 接入双路视频 (121)6.4.1 接入两个思翼相机或两个天空端HDMI输入模块 (121)6.4.2 接入两个第三方网口相机或光电吊舱 (121)6.4.3 接入一个思翼天空端HDMI输入模块和一个第三方网口相机或光电吊舱1216.5 设备常用参数 (123)6.6 无法显示视频图像的解决方法 (124)6.7 从遥控器输出图像至其他设备 (126)6.7.1 通过遥控器HDMI接口输出 (126)6.7.2 通过遥控器WiFi热点共享输出 (126)6.7.3 通过以太网口输出图像 (127)7 安卓系统 (132)7.1 下载应用 (132)7.2 如何导入并安装应用 (132)7.2.1 通过TF卡导入并安装 (132)7.2.2 通过U盘导入并安装 (132)7.2.3 通过Type-C文件传输功能导入并安装 (133)7.3 查看安卓固件版本 (136)8 思翼调参助手 (138)8.1 固件升级 (138)8.2 主要固件更新记录 (141)8.3 调参软件更新记录 (143)9 售后与保修 (144)9.1 返修流程 (144)9.2 保修政策 (144)9.2.1 7天包退货 (145)9.2.2 15天免费换货 (146)9.2.3 一年内免费保修 (147)阅读提示标识、图标在阅读用户手册时,请特别注意有如下标识的相关内容。
猎鹰450说明书
34
35 35 36 37 38 39 40 42 43 43 44 46 48
食 普通飞行模式示意固 食 3D模式下的制飞模式示 意 固 食 安韭示 意 回 食 飞机童装完成示意 圄 食 主旋翼平衡与双桨商直校E 食 动力异常检查 食- 锻保养方法
食 iI!!臭配件示意固
食 配件列表
'喜〉应主剖停止究电
翩翩翩咂肝凹的时源
8 . i:衡 勿拆开平.冤叫且量及附件 . ' 当电池还有很俗'香请勿急于充电
A
但电池使用注意事项
.M止侨卸殴.组电池 1
E
2 彼此短篇电池 1
,.比如源旁使用 1
也 .tt精咆池技人.. '然业将钉子插入电池中
,.让冲击就搜纳 1
溜,你 中戴勇温 1 用铁镶敲打就网"跟 1
通搜飞饥撮但锁巧在掌写初期有"定的艰度
要尽量遮兔擅自
爆作飞行
'在经碰的入士在费捕'才可以"但飞行
m练习咆'自锁椒'是入 n. 像温. ,
x
J\
更民
e 远离运"中军件
当离开饥主.翼与庵篇翼逞'售网切勿触?晨,车运离旧睛'忡的郎 ,拿
坏
元,略是人的头都要离开主 幅画在蜒的簸,李面
以避免造成危险及组
x阕
&l 千
凰"
下
k
-4 且'镜
L' 最 bM
t
i
副
友
副
偏 宿
费
捕'
右 能 向
-
h
· 协
!
n凰'"吁美
零度YS-X4-X4P-GEMINI-M-S PC版旋翼地面站用户手册V1.0
PC旋翼地面站用户手册V1.0零度智控(北京)智能科技有限公司Zero UAV (Beijing) Intelligence Technology Co.,Ltd.目录1 免责声明 (1)2 术语和缩略语 (2)3 地面站软件安装与简介 (3)3.1 菜单栏 (3)3.2 工具栏 (3)3.3 状态栏 (4)3.4 仪表板 (4)3.5 地图区域 (4)4 地面站软件参数说明 (5)4.1 文件菜单参数说明 (5)4.2 视图菜单参数说明 (5)4.3 航线菜单参数说明 (7)4.4 工具菜单参数说明 (8)4.5 设置菜单参数说明 (8)5 地面站软件应用 (11)5.1 文件菜单 (11)5.1.1 轨迹回放 (11)5.1.2 其他操作 (12)5.2 视图菜单 (12)5.2.1 检查CH5和CH6通道,F/S(失控保护) (12)5.2.2 校准电调行程 (13)5.2.3 电机平衡性和实际油门位 (13)5.2.4 返航降落 (14)5.2.5 指点飞行 (15)5.2.6 拍照 (16)5.2.7 照片数据下载 (17)5.2.8 陀螺清零 (18)5.2.9 舵机云台 (18)5.2.10 标注 (19)5.3 航线菜单 (20)5.3.1 航线飞行 (20)5.4 工具菜单 (23)零度智控(北京)智能科技有限公司| 15.4.1 配置串口 (23)5.4.2 位置搜索 (24)5.4.3 下载离线谷歌地图 (24)5.5 设置菜单 (25)5.5.1 地面站软件辅助设置(安装向导) (25)5.5.2 校准遥控器 (27)5.5.3 设置飞行器参数 (28)5.5.4 设置混控自定义参数 (28)5.5.5 校准磁罗盘 (29)5.5.6 飞行器晃动的参数调整 (30)5.5.7 机载数据记录——黑匣子功能 (31)5.5.8 开关伞测试 (32)附录 (33)附录A 零度技术支持 (33)附录B 更新说明 (33)2| 零度智控(北京)智能科技有限公司零度智控(北京)智能科技有限公司| 免责声明11 免责声明 危险感谢您购买零度产品。
DJI 地面站手册 1.4
1|
XP3.1 WayPoint
目录
导读 ................................................................................................................................................................. 3 概述 ................................................................................................................................................................. 4 系统结构 ............................................................................................................................................................ 4 系统特点 ............................................................................................................................................................ 4 多种控制模式 ....................................................
☆YS-X6多轴自动驾驶仪说明书3
28
29
30
1.G P S 模 块 插 头 (黑) 2.G P S 模 块 插 头 (红) 3.照 相 4.云 台 俯 仰 5.云 台 横 滚 6.电 机 8 7.电 机 7 8.电 机 6 9.电 机 5 1 0 .电 机 4 1 1 .电 机 3 1 2 .电 机 2 1 3 .电 机 1 1 4 .I M U 模 块 插 头 (黑) 1 5 .I M U 模 块 插 头 (红)
16 .C H 1 17 .C H 2 18 .C H 3 19 ,C H 4 20 .C H 5 21 .C H 6 22 .C H 7 (复 用 S B U S) 23 .C H 8 24 .接P C (升 级 固 件 ) 25 .不 接 26 .w i f i模 块 输 出 27 .动 力 电 压 采 集 (4S以 上 ) 28 .电 流 传 感 器 29 .L E D 灯 30 .电 源
3
安全说明
出于安全考虑,请您务必关注以下事项。 1 、务必在完成所有调试、检查后安装螺旋桨! 2、 安装IMU必须正面向上。 (有“IMU”字样为正面)。箭头指向为机头方向。 3、 开机顺序:先遥控器后飞控;关机顺序:先飞控后遥控器。 在使用S-BUS自适应功能情况下尤其关注! 4、 油门校准、手控舵位、实际舵位、通道设置必须正确无误。 5、 GPS+COMPASS为磁性敏感模块,应远离其它电子设备。安装时箭头指向为机头方向。 6、 飞行前请先设置遥控器FS功能。 7、 当GPS信号不良,如:GPS星数少于7颗(有红灯闪烁)或GPS地面静止GPS速度大于15CM。 不要使用GPS模式飞行。 8、 云台舵机供电为任一电调的电压输出。 当电调无BEC输出时,请您附加电源切勿通过飞 控。 9、 在自动返航过程中 , 遥控器0-10%的油门舵、 十字操作界面的最底端 (地面站软件的 “遥 控”下)为关闭电机。在其它模式下上述2种操作均不会关闭电机。 10、低电压保护非娱乐方式,请掌握好您的飞行时间,尽量避免使用低电压保护。 11、震动系数超限情况下切勿飞行。 12、校准磁场后必须检查航向角、磁场数据是否正确。 13、起飞前必须检查姿态角、静态角是否一致。 14、GPS+COMPASS、IMU 与 MC 的连接,需要注意插头颜色与丝印文字颜色保持一致。错误安 装可能造成设备短路。 15、系统电源防反插设计不是娱乐工具,请勿尝试。 16、在某些强磁场环境中,出现了航向角与实际转动角度不一致情况下,切勿 GPS 模式飞行 或在强磁场环境中再次校准磁场。 17、开接收机为系统默认状态。 关闭接收机为全自动飞行。开接收机时需要注意遥控器状 态。
大疆创新裁判系统用户手册说明书
2 © 2022 大疆创新 版权所有阅读提示符号说明 禁止 重要注意事项 操作、使用提示 词汇解释、参考信息前置参考阅读1. 《裁判系统用户手册》2. 裁判系统各模块说明书建议用户首先阅读裁判系统各模块说明书,了解裁判系统各模块的功能以及安装方式,正确安装裁判系统的各模块,再通过《裁判系统用户手册》了解整个裁判系统的功能。
修改日志本手册将在每赛季根据实际情况更新两次。
手册发布后,根据规定日期生效。
日期版本修改记录生效日期 2022.03.29 V1.21. 增加第三方成品模组的限制2. 删除飞镖“R ”标朝上的限制2022.03.28 2022.01.11 V1.11. 明确底盘功率的定义2. 修订机器人整机成品及开源机器人使用规范2022.01.11 2021.10.15V1.0 首次发布 2021.10.15© 2022 大疆创新 版权所有3目录阅读提示 (2)符号说明 (2)前置参考阅读 (2)修改日志 .................................................................................................................................................. 2 1.前言 ................................................................................................................................................ 10 2.技术规范 ........................................................................................................................................ 11 2.1 通用技术规范 .. (11)2.1.1能源 .................................................................................................................................. 11 2.1.2无线电 ............................................................................................................................. 12 2.1.3光学手段 .......................................................................................................................... 12 2.1.4视觉特征 .......................................................................................................................... 13 2.1.5机器人编号 ...................................................................................................................... 13 2.1.6外观设计 .......................................................................................................................... 14 2.1.7发射机构 .......................................................................................................................... 15 2.1.8自定义控制器 .................................................................................................................. 15 2.1.9其它 ................................................................................................................................. 16 2.2 机器人整机成品及开源机器人使用规范 . (17)2.2.1充分再设计 ...................................................................................................................... 17 2.2.2非充分再设计 .................................................................................................................. 18 2.2.3 无效再设计 . (18)2.3 机器人技术规范 (19)2.3.1英雄机器人 ...................................................................................................................... 19 2.3.2工程机器人 ...................................................................................................................... 20 2.3.3步兵机器人 ...................................................................................................................... 22 2.3.4空中机器人 ...................................................................................................................... 24 2.3.5哨兵机器人 ...................................................................................................................... 26 2.3.6飞镖系统 .......................................................................................................................... 27 2.3.7 雷达 ................................................................................................................................. 31 3.裁判系统安装规范 .......................................................................................................................... 33 3.1概述 ........................................................................................................................................ 33 3.2机器人裁判系统配置 ............................................................................................................... 34 3.3 主控模块安装规范 (35)3.3.1 安装步骤 (36)3.3.2安装要求 (37)3.4电源管理模块安装规范 (38)3.4.1安装步骤 (39)3.4.2安装要求 (41)3.5灯条模块安装规范 (43)3.5.1安装步骤 (44)3.5.2安装要求 (45)3.6装甲模块安装规范 (46)3.6.1通用 (48)3.6.2安装步骤 (51)3.6.3安装要求 (56)3.6.4ID编号设置 (58)3.7测速模块安装规范 (59)3.7.1安装步骤 (60)3.7.2安装要求 (65)3.8场地交互模块安装规范 (66)3.8.1安装步骤 (67)3.8.2安装要求 (68)3.8.3场地交互模块卡 (68)3.9相机图传模块(发送端)安装规范 (68)3.9.1安装步骤 (69)3.9.2安装要求 (70)3.10相机图传模块(接收端)安装规范 (70)3.10.1安装要求 (71)3.11定位模块安装规范 (71)3.11.1安装步骤 (72)3.11.2安装要求 (72)3.1217mm荧光弹丸充能装置安装规范 (73)3.12.1安装步骤 (74)3.12.2安装要求 (75)3.12.3自制紫外灯板指导及要求 (76)3.13超级电容管理模块安装规范 (76)3.13.1安装步骤 (76)3.13.2安装要求 (78)附录一17mm 测速模块转接块工程图 (79)4 © 2022 大疆创新版权所有© 2022 大疆创新 版权所有5 附录二 参考图纸 (80)表目录表2-1 控制方式汇总 (12)表2-2 自定义控制器制作参数说明 (15)表2-3 英雄机器人制作参数说明 (19)表2-4 工程机器人制作参数说明 (20)表2-5 步兵机器人制作参数说明 (22)表2-6 空中机器人制作参数说明 (24)表2-7 哨兵机器人制作参数说明 (26)表2-8 飞镖制作参数说明 (28)表2-9 飞镖发射架制作参数说明 (28)表2-10 雷达运算平台端制作参数说明 (31)表2-11 雷达传感器端参数说明 (31)表3-1 裁判系统组成模块 (33)表3-2 机器人裁判系统模块配置 (34)表3-3 电源管理模块接口对照 (42)6 © 2022 大疆创新版权所有© 2022 大疆创新 版权所有7图目录图 2-1 平衡步兵机器人示意图 (23)图 2-2 航行外观灯有效区域 (26)图 2-3 飞镖触发装置示意图 (29)图 2-4 飞镖触发装置遮挡示意图 (30)图 2-5 飞镖触发装置内部空腔遮挡示意图 (30)图 3-1 主控模块示意图 (36)图 3-2 主控模块安装示意图 (36)图 3-3 主控模块连线示意图 (37)图 3-4 主控模块安装位置示意图 (38)图 3-5 电源管理模块示意图 (39)图 3-6 电源管理模块安装示意图 (40)图 3-7 电源管理模块接口示意图 (41)图 3-8 电源管理模块接线示意图 (41)图 3-9 灯条模块示意图 (44)图 3-10 灯条模块安装示意图 (45)图 3-11 灯条模块底部示意图 (45)图 3-12 灯条模块接线示意图 (45)图 3-13 哨兵机器人灯条模块示意图 (46)图 3-14 指定装甲支撑架示意图 (47)图 3-15 小装甲模块示意图 (47)图 3-16 大装甲模块示意图 (48)图 3-17 机器人坐标系示意图 (48)图 3-18 机器人不同底盘形态X 轴示意图 (49)图 3-19 装甲模块受力示意图 (50)图 3-20 机器人保护示意图 (51)图 3-21 底盘预留孔位 (52)图 3-22 装甲支撑架安装示意图 (52)图 3-23 装甲模块安装示意图 (53)图 3-24 装甲模块连线示意图 (53)图 3-25 底盘预留孔位示意图 (54)图 3-26 装甲支撑架安装示意图 (54)图 3-27 装甲模块安装示意图 (55)图 3-28 底盘预留孔位示意图 (55)图3-29 哨兵支撑架安装示意图 (56)图3-30 哨兵装甲安装示意图 (56)图3-31 地面机器人装甲模块ID设置示意图 (59)图3-32 17mm测速模块示意图 (60)图3-33 42mm测速模块示意图 (60)图3-34 17mm枪管示意图 (61)图3-35 测速模块安装示意图 (62)图3-36 17mm转接块零件示意图 (62)图3-37 17mm转接块固定方式示意图 (63)图3-38 17mm短枪管安装示意图 (64)图3-39 42mm枪管示意图 (65)图3-40 测速模块安装规范示意图 (66)图3-41 场地交互模块示意图 (67)图3-42 场地交互模块连线示意图 (67)图3-43 场地交互模块安装示意图 (67)图3-44 场地交互模块卡示意图 (68)图3-45 相机图传模块(发送端)示意图 (69)图3-46 相机图传模块(发送端)安装示意图 (70)图3-47 相机图传模块(接收端)示意图 (71)图3-48 定位模块示意图 (71)图3-49 定位模块安装示意图 (72)图3-50 定位模块连线示意图 (72)图3-51 定位模块安装示意图 (73)图3-52 17mm荧光弹丸充能装置示意图 (74)图3-53 紫外灯板安装示意图 (75)图3-54 电容管理模块接线示意图 (77)8 © 2022 大疆创新版权所有© 2022 大疆创新 版权所有9附录图目录附录图 1 工程机器人装甲贴纸 - 2号 (80)附录图 2 步兵机器人装甲贴纸 - 3号 (80)附录图 3 步兵机器人装甲贴纸 - 4号 (81)附录图 4 步兵机器人装甲贴纸 - 5号 (81)附录图 5 英雄机器人装甲贴纸 - 1号 (82)附录图 6 平衡步兵机器人装甲贴纸 - 3号 (82)附录图 7 平衡步兵机器人装甲贴纸 - 4号 (83)附录图 8 平衡步兵机器人装甲贴纸 - 5号 (83)附录图 9 前哨站装甲贴纸 (84)附录图 10 基地小装甲贴纸 (84)附录图 11 哨兵机器人装甲贴纸 (85)附录图 12 基地大装甲贴纸 (85)1. 前言RoboMaster参赛队伍需自行研发和制作参赛机器人,参赛机器人需满足本文档描述的所有规范,否则无法通过赛前检录。
常见问题解答-零度智控
常见问题解答(FAQ)零度智控(北京)智能科技有限公司Zero UAV (Beijing) Intelligence TeCHnology Co.,Ltd飞控类通用1. Q: WiFi和电台的传输距离和频率是多少?使用什么通信协议?A: WiFi的传输距离为100米左右,具体距离取决于手机设备,频率为2.4GHz;电台的传输距离为1000米左右,频率为900MHz。
WiFi和电台使用RS232通信协议。
2. Q: WiFi忘记配置过的密码了,怎么办?A: 重新配置WiFi即可,配置WiFi一般选AP(点对点)模式,用户名不要带空格,密码只能是5位数字。
3. Q: 请问零度多旋翼用的电台的波特率是多少,使用前需要进行配置吗?A: 电台波特率是115200bps,不需要进行配置,按此图连接即插即用:4. Q: S4V2,X4V2,GEMINI都支持多少个航点?A: S4V2:不支持航点X4V2:128个航点GEMINI:255个航点5. Q: 返航降落在什么时候会出现?为什么有时候飞机会先爬升一段?如何退出返航降落模式?A: 返航降落在遥控器切换到这个功能的时候,或者遥控器关控或失控的时候才会出现。
返航降落必须在GPS有效定位的情况下才能有效执行,返航点为定位7颗星或以上时解锁起飞的地点。
如果飞机距离返航点25米外且高度低于20米,切换到返航降落模式时,飞机先升高到20米再返航;高度高于20米,切换到返航降落模式时,飞机会保持原有高度返航。
如果飞机距离返航点在25米以内,会保持原有高度返航。
返航启动后,X4系列只有将CH5拨到第1档(手动模式),飞机才会退出返航模式。
S4V2只有将CH6拨到第1档才退出返航模式。
6. Q: 单独购买的零度的飞控,需要配备什么KV值的电机?A: 电机的KV值与电调有关,与飞控无关,飞控只控制电调,不直接控制电机。
飞控的输出频率为400Hz,1000-2000的标准脉宽信号。
实践飞行操纵手册
实践飞行操纵手册前言随着多旋翼无人机的应用日趋广泛,多旋翼无人机的入门门槛越来越低,“到手飞”、个人航拍机等对操作人员的要求几乎是零,对毫无基本常识和经验的人来说也可以操作。
但这些都为人身和财产安全埋下了巨大的隐患,出于以上考虑,本手册阐述了多旋翼无人机的基本原理、总结了飞行过程中的注意事项、操作方法、以及如何规避风险。
这是一本适合飞行初学者的手册,旨在普及航空知识、和飞行常识等基本理论,根据经验提出在飞行中应该注意的问题和如何规避风险、应急处置等。
说明免责申明任何用户在使用本产品之前,请仔细阅读本声明,严格遵守本手册进行实践飞行操纵多旋翼无人机,一旦使用本产品,即视为对本声明全部内容的认可和接受。
确保多旋翼无人机供电系统及其他功能模块插线正确,并使飞行器远离人群和易损、易碎及危险物品。
使用本手册时,因下列原因造成人身伤害,财产损失等(包括直接或间接损害),熙祥航空不承担赔偿责任:1. 飞行员在饮酒、吸毒、药物麻醉、头晕、乏力、恶心等与其他身体或精神状况不佳的情况下,造成损害。
2. 飞行员的主观故意造成人身伤害、财产损失等。
因事故发生而引起的任何有关精神损害的赔偿。
3. 未按本手册的正确引导对无人机检查或操控。
4. 自行改装或更换熙祥航空生产的配件或零件,至使整个飞行器运行不良而造成的其他损害。
5. 飞行员操作失误或主观判断失误造成的损害赔偿。
6. 飞行器自然磨损(飞行时间达到100 小时以上)、朽蚀、线路老化等造成飞行器本身的运行不良。
7. 飞行器发出异常警报(例如红灯快闪),仍不降落,导致飞行器坠落。
8. 明知飞行器处于非正常状态(如进水、油、土、沙等其他不明物质以及未测试完成,主要部件发生明显故障、配件存在显而易见的缺损或缺失),仍然强制飞行,而造成的损害。
9.如果飞控不支持本手册中使用的功能,请跳过相关部分(手册以NAZA M V2飞控为例)。
一、多旋翼的系统组成及概述1、多旋翼无人机的分类按轴数分有三轴、四轴、六轴、八轴甚至十八轴等;按各轴的布局形状来分有四轴X型、四轴十字型等,X型的操纵型要比较好;按电机个数分有三旋翼、四旋翼、六旋翼、八旋翼甚至十八旋翼等;要大家明确一点是轴和旋翼一边情况下是相同的,有时候也是不同的,比如四轴八旋翼;是将四轴上每个轴上下各安装一个电机构成八旋翼。
固定翼飞控及地面站使用说明

固定翼飞控及地面站使用说明Modified by JACK on the afternoon of December 26, 2020固定翼飞控及地面站使用说明目录1 飞控使用说明_____________________________________ 错误!未定义书签。
飞控盒连接说明_______________________________________________ 错误!未定义书签。
其他相关硬件介绍_______________________________________ 错误!未定义书签。
电源部分_____________________________________________________ 错误!未定义书签。
通讯链路_____________________________________________________ 错误!未定义书签。
GPS部分 ____________________________________________________ 错误!未定义书签。
空速部分____________________________________________________ 错误!未定义书签。
舵机连接部分________________________________________________ 错误!未定义书签。
2.地面站介绍_______________________________________ 错误!未定义书签。
、硬件说明_____________________________________________ 错误!未定义书签。
、地面站软件简介_______________________________________ 错误!未定义书签。
、地面站软件安装_______________________________________ 错误!未定义书签。
PIX说明书V1.4.1

Pixhawk多轴使用说明书(V1.4.1)乐迪Pixhawk飞控四轴(ArduCopter)版本信息介绍 V1版本:完善基本操作说明V1.1版本:添加失控保护介绍V1.3版本:添加日志,EKF失控保护的介绍V1.4版本:飞行模式和解锁故障保护的详细介绍 V1.4.1版本:完善电流计设置简介非常感谢您购买深圳市乐迪电子有限公司生产的pixhawk飞控。
Pixhawk自动驾驶仪(简称pix)是一款非常优秀而且完全开源的自动驾驶控制器,他的前世就是大名鼎鼎的APM,由于APM的处理器已经接近满负荷,没有办法满足更复杂的运算处理,所以硬件厂商采用了目前最新标准的32位ARM处理器,第一代产品是PX4系列,他分为飞控处理器PX4FMU和输入输出接口板PX4IO。
PX4系列可以单独使用PX4FMU(但是接线很复杂),也可以配合输入输出接口板PX4IO来使用,但是因为没有统一的外壳,不好固定,再加上使用复杂,所以基本上属于一代实验版本。
通过PX4系列的经验,厂商终于简化了结构,把PX4FMU和PX4IO整合到一块板子上,并加上了骨头形状的外壳,优化了硬件和走线,也就是这款第二代产品Pixhawk。
可应用于固定翼、直升机、多旋翼、地面车辆等,建议:在您阅读本说明书时,边阅读边操作。
您在阅读这些说明时, 如遇到困难请查阅本说明书或致电我们售后( 0755-******** ) 及登陆航模类论坛( 如:/forum.php?mod=forumdisplay&fid=277泡泡老师教程,, 航模吧,乐迪微信公众平台,乐迪官方群:334960324)查看相关问题问答。
乐迪微信公众平台 乐迪官方群售后服务条款1,本条款仅适用于深圳市乐迪电子有限公司所生产的产品,乐迪通过其授权经销商销售的产品亦适用本条款。
2,乐迪产品自购买之日起,一周内经我司核实为质量问题,由乐迪承担返修产品的往返快递费,购买乐迪产品超过一周到一年内经我司核实为质量问题,用户和乐迪各自承担寄出返修产品的快递费。
电动直升机新手教程
华科尔单旋翼四通道飞机新手入门学习资料整理(不断收集中)一飞机到手时首先应该的注意事项1、我们在发货前都进行了大量的调整,请新手收到飞机后,不要随意调整遥控器所有按钮。
华科尔2402 2403的遥控器比较简单并拥有液晶屏的设计,的确给大家带来很多的便利,同时也正因为它的便利而存在隐患,因为它的每一项设置都代表很关键的调节参数,很多新手一旦飞机到手后出于好奇,随意调整它的设置,有的甚至到手后就出现秒炸的情况。
2、应该注意的问题就是十字盘,当你对频成功后,十字盘并不是100%保持水平的,不要误以为我们没有调试好而去试图调整它,它本身就不是100%水平的。
在飞机达到稳定状态时,不用管十字盘的角度,它会很自然的到最佳状态,不用太多理会,这个是跟飞机的重心和设计是有关系的。
飞行的稳定才是最重要的!3、对频率的时候,打开遥控器之前一定要先把油门摇杆放到最低,然后再插入飞机的电池,飞行结束后,要先拔掉飞机的电池,再关遥控器。
在这里我们特别声明,因为上述事件带来的损失,本公司概不承担任何责任。
4、2402遥控器使用说明视频片段1:新手收到飞机后应该注意的问题及遥控器功能简述二如何对频很多新手都问了,遥控器也开了,飞机的电池也插上了,飞机怎么没法控制啊,这是因为遥控器与飞机没有正常对上频,我来说明一下华科尔飞机(2.4G)正常的对频过程。
打开遥控器后,要在十秒内插上飞机的电池,等遥控器的进度条消失后,飞机的舵机会出现一个归位的声音的时候,代表对频成功。
以后每次飞行时都需要重新对频,如果飞行了一节电池,要换电池的时候勿须关闭遥控器,只需要插上新换的电池就可以了。
在这里一个重要说明,华科尔普通的无三轴陀螺仪的飞机对频前不用考虑飞机的放置位置,而华科尔的三轴陀螺仪的飞机在对频成功前一定要把飞机放到平整的地面上,否则会出现侧偏的情况!一般常见的三轴陀螺仪飞机为4#6S /X-WING及5#等UFO / 120D01及其他最新出厂的无副翼飞机。
飞宇电子DOS惯性姿态平衡仪安装说明书 2013.1.23
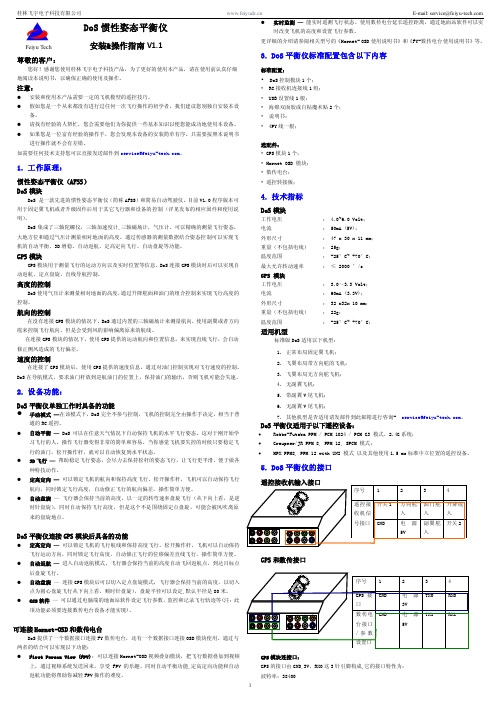
DoS 平衡仪单独工作时具备的功能 手动模式 —在该模式下,DoS 完全不参与控制,飞机的控制完全由操作手决定,相当于普
通的 RC 遥控。 自动平衡 — DoS 可以在任意天气情况下自动保持飞机的水平飞行姿态。这对于刚开始学
习飞行的人,操作飞行器变得非常的简单和容易。当你感觉飞机要失控的时候只要稳定飞 行的油门,松开操作杆,就可以自动恢复到水平状态。 3D 飞行 — 帮助稳定飞行姿态,会尽力去保持松杆的姿态飞行,让飞行更平滑,便于做各 种特技动作。
• 说明书; • 4PY 线一根;
进行操作就不会有差错。 如需要任何技术支持您可以直接发送邮件到 service@。
选配件: • GPS 模块 1 个;
1. 工作原理:
惯性姿态平衡仪(AFSS) DoS 模块
DoS 是一款先进的惯性姿态平衡仪(简称 AFSS)和简易自动驾驶仪。目前 V1.0 程序版本可
差动舵机 2 ESC/油门舵机 方向舵机
3)V 尾带副翼布局飞机对应表:
S1
S2
S3
S4
副翼舵机 1
差动舵机 1 ESC/油门舵机 差动舵机 2
4)V 尾无副翼布局飞机对应表:
S1
S2
S3
S4
差动舵机 1 差动舵机 2 油门舵机
空
6. DoS 的供电
S5 副翼舵机 2
S5 副翼舵机 2
AI L OUT
控制。
外形尺寸
: 32 x32x 10 mm;
航向的控制
在没有连接 GPS 模块的情况下,DoS 通过内置的三轴磁场计来测量航向,使用副翼或者方向
重量(不包括电线) 温度范围
: 22g; : -25°C~ +70°C;
Prox 用户手册
ZHቤተ መጻሕፍቲ ባይዱ
索引
1 简介 .................................................................................................................. 1 2 符号 .................................................................................................................................................. 2
9 磨牙曝光 .......................................................................................................... 15
9.1 选择曝光参数 ........................................................................................………................... 15 9.2 病人定位 ..................................................................................................………................. 16 9.3 曝光 ..........................................................................................................………................ 18 10 前磨牙和犬牙曝光 .......................................................................………............ 19 10.1 选择曝光参数 .............................................................................................………................. 19 10.2 病人定位 .........................................................................................................………........... 20 10.3 曝光 ...................................................................................................................………............ 22 11 切牙曝光 ................................................................................................………... 23 11.1 选择曝光参数 .....................................................................................................……….... 23 11.2 病人定位 ...........................................................................................................………........... 24 11.3 曝光 .......................................................................................................................………....... 26 12 咬合片曝光 ..............................................................................................………... 27 12.1 选择曝光参数 ............................................................................................................................ 27 12.2 病人定位 ...............................................................................................................………........ 28 12.3 曝光 .........................................................................................................................……….... 29
零海拔 FXS网关使用说明V1.0说明书

FXS网关使用说明V1.0深圳市零海拔科技有限公司Marketing@Support@2010-6-7目录1.概要 (1)1.1. 简介 (1)1.2. 协议 (1)1.3. 硬件特性 (2)1.4. 软件特性 (2)1.5. 产品包装清单 (2)1.6. 产品外观 (3)2.连接说明 (5)2.1. 接口说明: (5)2.2. 显示灯说明: (7)2.3. 连接图: (8)3.开始配置 (10)3.1. 出厂设置参数 (10)3.2. 电话操作的星号命令 (11)3.3. 呼叫 (12)3.3.1. 拔打电话本号码 (12)3.4. 登陆到网关 (12)3.4.1. 获取IP (12)3.4.2. 打开浏览器输入IP (12)3.5. 配置网关 (14)3.5.1. 用户选项 (14)3.5.2.网络配置 (18)3.5.3.呼叫设置 (20)3.5.3.1. H.323 终端配置 (20)3.5.3.2. 直连模式 (21)3.5.3.3. 关守模式 (21)3.5.3.4. 加密 (25)3.5.3.5. H.323高级设置 (25)3.5.3.6. SIP协议 (27)3.5.3.7. 防火墙穿越 (36)3.5.4. 话机设置 (39)3.5.5. 保存改动: (40)3.5.6. 放弃改动: (40)4.电话本 (41)5.工具 (42)5.1. 在线升级 (42)5.2. 更改密码 (42)5.3. 恢复出厂设置 (43)5.4. 重启系统 (43)6.拨号规则 (43)6.1. 基本规则语法: (44)6.2. 带号码位数限制的拨号规则 (45)7.了解更多 (45) FXS系列网关说明书1.概要1.1. 简介FXS系列网关是零海拔科技开发的高性能宽带网关,用于将模拟电话连接到VOIP网络电话系统或VOIP服务提供商。
FXS系列网关内置H.323与SIP协议,高可靠的线路检测功能最高限度地防止线路挂死。
洛雷克4MP超高清安防摄像头说明书

4MP SUPER HDBULLET SECURITY CAMERALNB4321 SeriesNight Vision 130/90 FT 40/27 MFEATURES:•High definition 4MP image sensor delivers double the detail of 1080p 1•4MP Super HD video recording provides superior quality for reviewing fine details in heightened resolution•Color Night Vision™ provides full color images at night, letting you identify objects and people more accurately than in black & white 2 •IR night vision range up to 130ft (40m) in ambient lighting and 90ft (27m) in total darkness 3 •ClearNight imaging for improved low light performance and improved recording efficiency•True High Dynamic Range (HDR) improves image clarity in high-contrast lighting, revealing details in extremely bright and dark areas of the image •Intelligent compression saves recording space by optimizing video performance based on available bandwidth •Wide angle 83° field of view (horizontal) •Ceiling / wall mountable•Simple camera installation using a single CAT5e cable with Power over Ethernet (PoE) •UL-compliant cable suitable for surface and in-wall installation•Extend the camera's video and power with a single Ethernet cable up to 300ft (91m) from the recorder •Single-screw bracket adjustment for faster installation •Cold climate capability (-22°F / -30°C)•Weatherproof metal housing for outdoor & indoor installation (IP66 Rated) 4HIGH DEFINITION PEACE OF MINDRecord outstanding 4MP Super HD video for double the detail of 1080p. Advanced Color Night Vision™ and True HDR technology ensure clear identification in the most challenging lighting conditions, indoors and outdoors. Convenient one cable installation provides power to the camera and carries HD video to the recorder.Indoor/outdoor4MPSuper HD83°Field of ViewTrue High Dynamic Range (HDR) Image ClarityColor Night Vision ™Image Sensor 1/3" 4MP 1Video Format NTSC / PAL Effective Pixels H: 2688 × V: 1520Resolution4MP (2688×1520) @ 20fpsScan System Progressive Sync System I nternal S/N Ratio ≥42dB (AGC OFF)Iris E I SAES Shutter Speed 1/3 (1/4) ~ 1/100,000s Min. Illumination 0.38 lux without IR0.28 lux with IR Video Output I PLens / Lens Type3.6mm F2.0 / FixedField of View (Horizontal) 83°Termination RJ45 Ethernet / 12V DCPower Barrel (optional)IR LED Type 850nm Night Vision Range 130ft (40m) / 90ft (27m) 3Color Night Vision™YesPower Requirement PoE (Power over Ethernet) Class 3 / 12V DC Power ConsumptionMax. 265mA / 3.2W Operating Temp. Range -22° ~ 140°F / -30° ~ 60°C Operating Humidity Range <95% RHEnvironmental Rating IP66 (Indoor / Outdoor) 4Weight0.93lbs / 0.42kgSpecificationsProduct InformationModel LNB4321BConfiguration 4MP Super HD IP Bullet Camera PackageBrown Box Package Dimensions (W × D × H)15.9 × 5.7 × 4.6"406 × 117 × 117mm Package Weight 1.4lbs / 0.6kg Package Cube 0.24cbf / 0.007cbm UPC 6-95529-00707-6Contents1× 4MP HD IP Bullet Camera, 1× 60ft (18m) UL-Compliant CAT5e Ethernet Cable, 1× Mounting Kit, Quick Setup Guides1. Compatible with all Lorex HD NVRs except for LNR100 (LNR110 supported), LNR200 & LNR300Series. For the most up-to-date list of compatible recorders, visit /support2. Full color nighttime video typically switches to black & white IR night vision below 1 lux to ensure optimal low-light image quality.3. Stated IR illumination range is based on ideal conditions in typical outdoor night time ambient lighting and in total darkness. Actual range and image clarity depends on installation location, viewing area, and light reflection / absorption level of object. In low light, the camera will switch to black and white.4. Not intended for submersion in water. Installation in a sheltered location recommended.DisclaimersDimensionsInstallation Diagram。
【2021年整理】四旋翼无人机的导航与控制简介
体
动
姿态 控制 F1, F2 , F3, F4
力 学
器
模
型
,,
x, y, z +
vx,vy,vz
1/Ms
1/s
,t
航姿系统
x, y, z
,,
GPS
6/26/2021
精品课件,可编辑,欢迎下载,2021最新整理
8
精品课件,可编辑,欢迎下载,2021最新整理
4
飞机基本运动:
6/26/2021
精品课件,可编辑,欢迎下载,2021最新整理
5
无人机姿态表示方法:
欧拉角法:俯仰角:θ (绕y轴旋转产生) 横滚角:Φ(绕x轴旋转产生) 偏航角:Ψ (绕z轴旋转产生)
在坐标系转换过程中按照 z-y-x 的旋转顺序,得到如下姿态旋转矩阵:
7
飞控:
四轴飞行器最基本同时也是重要的功能是实现飞行姿态的稳定控 制,飞控算法(飞行器姿态控制算法)即根据输入姿态角和遥控命令 解算四个电机 PWM 占空比值,从而使姿态角快速、准确地逼近期望 值。
*
x*, y*, z*
**
位置
速度
控制 器
v*x , v*y , v*z
控制 器
机
总拉力 *, *,**
无刷电机(4个) 电子调速器(简称电调,4个,常见有好盈、中特威、新西达等品牌) 螺旋桨(4个,需要2个正浆,2个反浆) 飞行控制板(常见有KK、FF、玉兔等品牌) 电池(11.1v航模动力电池) 遥控器(最低四通道遥控器)
机架(非必选)
6/26/2021
精品课件,可编辑,欢迎下载,2021最新整理
四元数法:与欧拉角相比,采用四元数法姿态表示可大大减少处理器 计算量,提高姿态解算速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PC旋翼地面站用户手册V1.0零度智控(北京)智能科技有限公司Zero UAV (Beijing) Intelligence Technology Co.,Ltd.目录1 免责声明 (1)2 术语和缩略语 (2)3 地面站软件安装与简介 (3)3.1 菜单栏 (3)3.2 工具栏 (3)3.3 状态栏 (4)3.4 仪表板 (4)3.5 地图区域 (4)4 地面站软件参数说明 (5)4.1 文件菜单参数说明 (5)4.2 视图菜单参数说明 (5)4.3 航线菜单参数说明 (7)4.4 工具菜单参数说明 (8)4.5 设置菜单参数说明 (8)5 地面站软件应用 (11)5.1 文件菜单 (11)5.1.1 轨迹回放 (11)5.1.2 其他操作 (12)5.2 视图菜单 (12)5.2.1 检查CH5和CH6通道,F/S(失控保护) (12)5.2.2 校准电调行程 (13)5.2.3 电机平衡性和实际油门位 (13)5.2.4 返航降落 (14)5.2.5 指点飞行 (15)5.2.6 拍照 (16)5.2.7 照片数据下载 (17)5.2.8 陀螺清零 (18)5.2.9 舵机云台 (18)5.2.10 标注 (19)5.3 航线菜单 (20)5.3.1 航线飞行 (20)5.4 工具菜单 (23)零度智控(北京)智能科技有限公司| 15.4.1 配置串口 (23)5.4.2 位置搜索 (24)5.4.3 下载离线谷歌地图 (24)5.5 设置菜单 (25)5.5.1 地面站软件辅助设置(安装向导) (25)5.5.2 校准遥控器 (27)5.5.3 设置飞行器参数 (28)5.5.4 设置混控自定义参数 (28)5.5.5 校准磁罗盘 (29)5.5.6 飞行器晃动的参数调整 (30)5.5.7 机载数据记录——黑匣子功能 (31)5.5.8 开关伞测试 (32)附录 (33)附录A 零度技术支持 (33)附录B 更新说明 (33)2| 零度智控(北京)智能科技有限公司零度智控(北京)智能科技有限公司| 免责声明11 免责声明 危险感谢您购买零度产品。
本产品为特殊控制物项,错误操作可能导致物品损害,人员受伤甚至死亡,用户须承担相应的刑事责任。
本产品不适合未满18周岁的未成年人使用。
为了更好的使用此设备并确保您的安全,使用前请仔细阅读说明书,或向当地产品经销商或生产商咨询。
您可直接登录零度官网( )查询产品相关信息。
警告请把电器部件放在儿童触及范围之外;确保飞行器飞行时远离人群及危险物品,建议您在专用的飞行场地飞行;切勿在饮酒、疲劳或其他精神状态不佳的情况下进行任何操作;请严格按产品手册进行操作;飞行前请确保供电系统及其他功能模块连接正确,否则可能造成设备的烧毁;遥控器通道校准、固件升级、参数设置前请关闭动力电源或取下螺旋桨,防止电机突然高速旋转;切勿在恶劣环境下飞行;请勿改变机架的结构,如改变,后果自负。
1. 本产品为特殊控制物项,用户将为使用本产品的一切行为负全部责任,对于直接或间接使用本产品造成的后果厂家不承担任何责任。
2. 本产品使用过程中,对于造成违反公共秩序或公共安全的行为,用户须承担法律责任。
3. 对于以下几种情形,我们不提供任何技术支持和安全承诺:(1)通过非正规代理商或非正常渠道获取本产品的单位或个人;(2)未经授权改装、调试和更换零件的产品;(3)保修卡,序列号或飞行数据丢失的产品;(4)由于个人操作失误或自然灾害不可抗拒的因素造成人身伤害及财产损失。
2术语和缩略语2术语和缩略语| 零度智控(北京)智能科技有限公司零度智控(北京)智能科技有限公司 | 地面站软件安装与简介33 地面站软件安装与简介PC 版GCS 安装步骤如下:1. 在官网()下载专区下载YS-GCS PC 版软件“ZERO-TECH旋翼地面站”。
2. 解压后,双击“ZERO-TECH 旋翼地面站.exe ”即可打开使用,主界面如图1所示。
图1地面站整个界面主要包括五个区域:菜单栏、工具栏、状态栏、仪表板、地图显示区。
3.1 菜单栏菜单栏共包含文件、视图、航线、工具、设置、帮助六部分内容,各菜单下相关功能的实现请参见“5地面站软件应用”。
3.2 工具栏工具栏的各按钮用于相应功能的快速操作,共包含如下三部分内容。
具体操作可参见菜单栏中相应功能的操作情况。
3.3 状态栏界面左下角“坐标”状态栏,实时显示鼠标所指位置的经纬度。
在画航线时会显示距上一个航点的距离,以及航线的总长度。
3.4 仪表板界面右侧的仪表板显示飞机运行的基本状态,并执行照相、开启航线、下载POS数据等操作。
具体操作请参见后续的操作说明。
3.5 地图区域本地面站为用户提供了非常方便的可视化操作界面,使得飞行任务编辑、飞行的监视与实时修改任务等操作变得非常方便。
地图区域显示电子地图、航线、航点、飞机飞行航线等信息。
4地面站软件安装与简介| 零度智控(北京)智能科技有限公司4地面站软件参数说明本章按照地面站软件菜单栏下拉菜单进行介绍,分别讲解各个功能的相关参数。
4.1 文件菜单参数说明相关参数的说明,请见下表。
4.2 视图菜单参数说明相关参数的说明,请见下表。
零度智控(北京)智能科技有限公司| 地面站软件参数说明 54.3 航线菜单参数说明相关参数的说明,请见下表。
零度智控(北京)智能科技有限公司| 地面站软件参数说明7单点编辑的相关参数如下表所示。
4.4 工具菜单参数说明相关参数的说明,请见下表。
4.5 设置菜单参数说明相关参数的说明,请见下表。
8地面站软件参数说明| 零度智控(北京)智能科技有限公司零度智控(北京)智能科技有限公司| 地面站软件参数说明910地面站软件参数说明| 零度智控(北京)智能科技有限公司零度智控(北京)智能科技有限公司 | 地面站软件应用115 地面站软件应用注意● 使用地面站前,请先连接好本章按照地面站软件的菜单栏下拉菜单进行介绍,分别讲解各个菜单下的具体内容。
5.1 文件菜单 5.1.1 轨迹回放轨迹回放的操作步骤如下:1. 打开地面站后,选择“文件”→“轨迹回放”,弹出选择回放文件窗口,如图2所示。
2. 根据飞控的不同,选择对应的要回放文件,文件后缀名为“.hj ”或“.hjext2”,如20141113142012.hj 。
图23. 点击“打开”,开始回放数据,如图3所示。
4. 数据回放过程中,您可以做以下操作:– 查看相关参数的变化。
– 根据自己的需要,调整回放速度、回放进度。
– 点击“暂停”,暂停回放;点击“上一帧”或“下一帧”,查看相应的轨迹回放情况。
说明:双子星飞控的轨迹回放文件后缀名为“.hjext2”。
12地面站软件应用 | 零度智控(北京)智能科技有限公司图35.1.2 其他操作打开串口通过USB 转串口线连接飞控和电脑后,选择“文件”→“打开串口”打开连接。
为了建立与飞控的通讯,必须先正确设置串口。
设置串口的步骤请参见“5.4.1配置串口”。
打开WiFi连接飞控和电脑后,选择“文件”→“打开Wifi ”打开连接。
谷歌地球/谷歌地图选择“文件”→“谷歌地球”打开三维地图;选择“文件”→“谷歌地图”打开平面地图。
5.2 视图菜单5.2.1 检查CH5和CH6通道,F/S (失控保护)检查工作模式的切换接好GPS 模块后,检查工作模式的切换操作是否正常。
例如,CH5在第1档,CH6在任意档时,GCS 右侧“仪表板”中的“飞行状态”应该显示为“手动”,如图4所示。
如果不是,请检查硬件连接或遥控器设置。
图4零度智控(北京)智能科技有限公司 | 地面站软件应用13检查失控保护关闭遥控器,“飞行状态”应该显示为“返航降落”,“飞行数据”界面“手控舵位”图中,油门滑块在中位附近,并显示绿色。
如不是,请重新设置失控保护。
5.2.2 校准电调行程校准电调行程前,请先卸下螺旋桨。
本操作以好盈电调为例,具体步骤如下:1. 只接通飞控电,把遥控器油门收到底,CH5放在第1档。
2. 点击“仪表板”中的“进入设置”,“飞行状态”显示为“设置状态”,如图5所示。
3. 掰杆解锁后,将油门杆推到最高位,然后接通动力电。
4. 听见“滴—滴”两声后,将油门杆推到最低位,接着电调将会发出“滴—滴—滴……”的提示音(滴声次数跟电池片数相同),表示校准完毕。
5. 点击“退出设置”,退出校准操作。
图56. 检查是否校准成功:掰杆解锁后推油,所有电机应该同步工作,如不是,请重新校准电调。
5.2.3电机平衡性和实际油门位飞行过程中,需要时刻关注飞行器的电机平衡性和实际油门位。
打开Wifi 时,地面站窗口下方会直接弹出“飞行数据”栏,可以查看;也可以选择“视图”→“飞行数据”进行查看,如图6所示。
图65.2.3.1 电机平衡性当顺时针桨或逆时针桨不平衡时(反扭矩也会不平衡),离开地面悬停且不操作航向时,“电机平衡性”会显示顺时针转的桨不平或逆时针转的桨不平。
根据提示,可调平对应电机的安装桨或换质量较好的桨。
如果需要获得更稳定的飞行效果,请精确检查电机、桨叶的平衡与水平对称性,直至平飞悬停时,电机平衡性显示“良好”。
5.2.3.2 实际油门位悬停时油门位置,一般在40~65为正常(显示绿色);低于40(显示黄色),表明飞机较轻,电调工作在轻负载状态;超过65(显示红色),表明飞机较重或电池电压低,需要调整载荷或更换电池。
5.2.4 返航降落注意当人与飞行器距离太近时,建议不要切入返航降落模式,以防发生意外情况。
返航降落的操作步骤如下:1.掰杆解锁成功,且GPS定位后(7颗星及以上),飞行器会自动记录回家点。
2.选择“视图”→“仪表板”,打开仪表板,点击“自动降落”按钮。
5秒后,飞控控制飞行器启动回航降落——自动对尾。
返航期间飞行器不接受摇杆通道的手动干预。
3.飞行器到达回家点后,会缓慢降落,可通过摇杆通道干预飞行器的飞行状态,方便寻找更合适的降落点。
此时,飞控自动控制油门,遥控器油门杆不起作用。
4.直到飞行器完全降落地面,电机才会缓缓停转,此时要把油门收到底,5秒后,电机落锁,需要掰杆解锁才能重新启动电机。
说明:●如果飞行器距离返航点25米外,高度低于20米,切入返航降落模式时,飞行器先升高到20米再返航;高度高于20米,切入返航降落模式时,飞行器会保持原有高度返航。
如果飞行器距离返航点25米内,会保持原有高度返航。
●回航启动后,只有将CH5拨到第1档,飞行器才会退出返航降落模式。
14地面站软件应用| 零度智控(北京)智能科技有限公司零度智控(北京)智能科技有限公司 | 地面站软件应用155.2.5 指点飞行注意点击过于遥远的地方将使飞行器飞出视线外,请谨慎使用指点飞行功能。
GPS 自动悬停模式下,可以进行指点飞行。