最小二乘拟合平面和直线matlab
matlab最小二乘法确定拟合直线
matlab最小二乘法确定拟合直线最小二乘法是一种常用的数学工具,可以用于确定一组数据点的拟合直线。
在MATLAB中,使用最小二乘法进行拟合直线的步骤包括以下几个:
1. 读入数据
首先需要读入需要拟合的数据。
通常的做法是使用MATLAB中的load 函数来读入数据。
2. 绘制散点图
在进行数据拟合前,需要先绘制散点图来观察数据的分布情况。
使用MATLAB中的plot函数可以绘制出散点图。
3. 构造拟合直线
使用最小二乘法可以得到一条拟合直线的方程,这条直线可以被表示为y = mx + b,其中m表示斜率,b表示截距。
使用MATLAB中的polyfit函数可以进行多项式拟合,根据拟合的结果可以确定斜率和截距。
4. 绘制拟合直线
在得到拟合直线的方程后,可以使用MATLAB中的plot函数来绘制拟合直线。
5. 显示拟合结果
最后,需要显示出拟合结果,包括拟合直线的方程和误差等信息。
可以使用MATLAB中的disp函数来显示出这些信息。
以上是在MATLAB中使用最小二乘法确定拟合直线的基本步骤。
使用这些步骤可以轻松地进行一次数据拟合,并得出准确的拟合结果。
需要注意的是,在进行拟合时应当注意选择合适的拟合函数和拟合参数,以确保得到的拟合结果具有较高的精度和稳定性。
另外,在数据处理时也应当注意去除掉异常值,以避免对拟合结果产生干扰。
matlab最小二乘法求参数
matlab最小二乘法求参数一、引言最小二乘法是数学中常见的一个工具,它用于寻找最适合一组数据的函数参数。
在非线性回回归和多元线性回归中,最小二乘法是非常有用的一种工具。
MATLAB是一种流行的计算机解释型编程语言,广泛应用于科学、工程、财务等领域。
Matlab中有许多内置的函数,支持最小二乘法。
本文介绍如何在Matlab中使用最小二乘法函数lsqcurvefit或lsqnonlin求解函数参数。
二、最小二乘法最小二乘法是用于寻找数据点到拟合函数直线或曲线之间的最小平方距离的方法,通常用于回归分析中。
它是一种优化问题,可以通过优化算法来解决。
最小二乘法通常用于线性和非线性回归分析。
在线性回归中,拟合的函数是线性函数; 而在非线性回归中,拟合的函数也可以是任意函数。
在这种情况下,最小二乘法可以通过非线性优化方法来解决。
假设有N个数据点(x1,y1),(x2,y2),...(xn,yn),我们想要找到一个函数f(x,θ)来逼近这些数据点,其中θ是函数的参数。
最小二乘法的目标是使f(x,θ)与y尽可能接近。
误差函数可以定义为:E(θ)=∑i=1^N[f(xi,θ)-yi]^2最小二乘法的目标是最小化误差函数θ*=argmin(E(θ))为了寻找θ,我们可以使用最小二乘法优化算法。
有两种方法可以解决这个问题:线性最小二乘法(LLS)和非线性最小二乘法(NLS)。
三、线性最小二乘法在线性最小二乘法中,函数f(x,θ)是线性的,可以表示为:f(x,θ)=θ1x1+θ2x2+...+θmxm 其中θ=(θ1,θ2,...,θm)是待定的函数参数。
在这种情况下,误差函数可以写成E(θ)=∑i=1^N(θ1x1i+θ2x2i+...+θmxmi-yi)^2我们可以将误差函数写成矩阵形式。
假设我们有一个m×N的矩阵X,它由输入数据点(x1i,x2i,..,xmi)构成,我们还有长度为N的y向量。
随着m的增加参数数量增加,此时,我们的优化问题变成了θ*=argmin||Xθ-y||^2此处||.||表示二范数,即向量各分量的平方和的平方根。
最小二乘法曲线拟合_原理及matlab实现
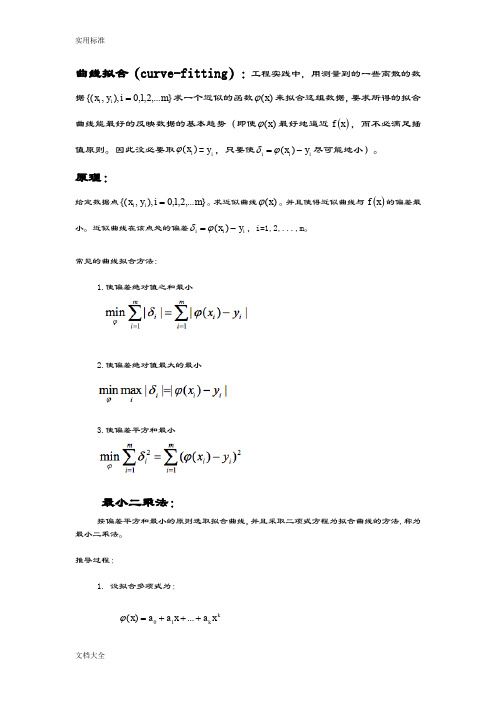
曲线拟合(curve-fitting ):工程实践中,用测量到的一些离散的数据},...2,1,0),,{(m i y x i i =求一个近似的函数)(x ϕ来拟合这组数据,要求所得的拟合曲线能最好的反映数据的基本趋势(即使)(x ϕ最好地逼近()x f ,而不必满足插值原则。
因此没必要取)(i x ϕ=i y ,只要使i i i y x -=)(ϕδ尽可能地小)。
原理:给定数据点},...2,1,0),,{(m i y x i i =。
求近似曲线)(x ϕ。
并且使得近似曲线与()x f 的偏差最小。
近似曲线在该点处的偏差i i i y x -=)(ϕδ,i=1,2,...,m 。
常见的曲线拟合方法:1.使偏差绝对值之和最小2.使偏差绝对值最大的最小3.使偏差平方和最小最小二乘法:按偏差平方和最小的原则选取拟合曲线,并且采取二项式方程为拟合曲线的方法,称为最小二乘法。
推导过程:1. 设拟合多项式为:kk x a x a a x +++=...)(10ϕ2. 各点到这条曲线的距离之和,即偏差平方和如下:3. 问题转化为求待定系数0a ...k a 对等式右边求i a 偏导数,因而我们得到了:.......4、 把这些等式化简并表示成矩阵的形式,就可以得到下面的矩阵:5. 将这个范德蒙得矩阵化简后可得到:6. 也就是说X*A=Y ,那么A = (X'*X)-1*X'*Y ,便得到了系数矩阵A ,同时,我们也就得到了拟合曲线。
MATLAB实现:MATLAB提供了polyfit()函数命令进行最小二乘曲线拟合。
调用格式:p=polyfit(x,y,n)[p,s]= polyfit(x,y,n)[p,s,mu]=polyfit(x,y,n)x,y为数据点,n为多项式阶数,返回p为幂次从高到低的多项式系数向量p。
x 必须是单调的。
矩阵s包括R(对x进行QR分解的三角元素)、df(自由度)、normr(残差)用于生成预测值的误差估计。
matlab最小二乘法拟合直线

matlab最小二乘法拟合直线【导言】直线拟合是数据分析和数学建模中常用的方法之一,而最小二乘法则是在直线拟合中最常用的方法之一。
在本文中,将介绍使用Matlab进行最小二乘法拟合直线的步骤和原理,并就此主题进行深入的探讨。
【正文】一、最小二乘法简介最小二乘法是一种数学优化方法,它通过最小化误差的平方和来寻找函数与观测数据之间的最佳拟合。
在直线拟合中,最小二乘法的目标是找到一条直线,使得所有观测数据点到直线的距离之和最小。
1. 确定拟合的模型在直线拟合中,我们的模型可以表示为:Y = a*X + b,其中a和b为待求参数,X为自变量,Y为因变量。
2. 计算误差对于每一个观测数据点(x_i, y_i),计算其到直线的垂直距离d_i,即误差。
误差可以表示为:d_i = y_i - (a*x_i + b)。
3. 求解最小二乘法问题最小二乘法的目标是最小化所有观测数据点到直线的距离之和,即最小化误差的平方和:min Σ(d_i^2) = min Σ(y_i - (a*x_i + b))^2。
通过求解该最小化问题,可以得到最佳拟合的直线斜率a和截距b的值。
二、Matlab实现最小二乘法拟合直线的步骤下面将介绍使用Matlab进行最小二乘法拟合直线的基本步骤。
1. 导入数据需要将实验数据导入Matlab。
可以使用matlab自带的readtable函数从文件中读取数据,也可以使用xlsread函数直接从Excel文件中读取数据。
2. 数据预处理在进行最小二乘法拟合直线之前,先对数据进行预处理。
一般情况下,可以对数据进行去除异常值、归一化等操作,以确保数据的准确性和可靠性。
3. 拟合直线使用Matlab的polyfit函数可以实现直线拟合。
polyfit函数可以拟合输入数据的曲线或平面,并返回拟合参数。
在拟合直线时,需要指定拟合的阶数,对于直线拟合,阶数为1。
4. 绘制拟合直线使用Matlab的plot函数可以将拟合的直线绘制出来,以便于观察拟合效果。
matlab 最小二乘拟合直线并输出直线方程

在Matlab中,最小二乘法是一种常见的数学拟合技术,可以用来拟合直线,曲线甚至更复杂的函数。
通过最小二乘法,可以找到最适合数据点的直线方程,从而能够更好地分析和预测数据之间的关系。
在本文中,我将详细介绍如何在Matlab中使用最小二乘法来拟合直线,并输出直线方程。
我们需要准备一组数据点。
假设我们有一组横坐标和纵坐标的数据点,分别用变量x和y表示。
接下来,我们可以使用Matlab中的polyfit函数来进行最小二乘拟合。
该函数的语法如下:```matlabp = polyfit(x, y, 1);```其中,x和y分别代表数据点的横坐标和纵坐标,而1代表要拟合的直线的次数,即一次函数。
执行该语句后,变量p将会存储拟合出的直线的系数,即直线方程y = ax + b中的a和b。
在接下来的内容中,我将详细讨论如何通过最小二乘法拟合直线,并输出直线方程。
具体而言,我们将从如何准备数据、使用polyfit函数进行拟合、得到直线方程以及如何应用和解释直线拟合结果等方面进行全面分析。
一、数据准备在使用最小二乘法拟合直线之前,首先要准备一组数据点。
这些数据点应该是具有一定规律性的,从而能够通过直线拟合来揭示数据之间的关系。
在这一部分,我将详细介绍如何准备数据,并重点关注数据的合理性和可靠性。
1.1 数据收集要拟合直线,首先需要收集一组数据点。
这些数据点可以来源于实验观测、实际测量或者模拟计算等方式。
在收集数据时,需要保证数据的准确性和完整性。
还需要考虑数据的分布范围和密度,以便更好地反映数据之间的关系。
1.2 数据预处理在拟合直线之前,通常需要对数据进行一定的预处理。
这可能包括去除异常值、处理缺失数据,甚至进行数据变换等操作。
在这一步中,我将介绍如何进行数据预处理,并强调预处理对最终拟合结果的影响。
二、最小二乘拟合当数据准备工作完成后,就可以使用polyfit函数进行最小二乘拟合了。
在这一部分,我将详细介绍polyfit函数的使用方法,并解释其背后的数学原理。
Matlab最小二乘法曲线拟合

最小二乘法在曲线拟合中比较普遍。
拟合的模型主要有1.直线型2.多项式型3.分数函数型4.指数函数型5.对数线性型6.高斯函数型......一般对于LS问题,通常利用反斜杠运算“\”、fminsearch或优化工具箱提供的极小化函数求解。
在Matlab中,曲线拟合工具箱也提供了曲线拟合的图形界面操作。
在命令提示符后键入:cftool,即可根据数据,选择适当的拟合模型。
“\”命令1.假设要拟合的多项式是:y=a+b*x+c*x^2.首先建立设计矩阵X:X=[ones(size(x)) x x^2];执行:para=X\ypara中包含了三个参数:para(1)=a;para(2)=b;para(3)=c;这种方法对于系数是线性的模型也适应。
2.假设要拟合:y=a+b*exp(x)+cx*exp(x^2)设计矩阵X为X=[ones(size(x)) exp(x) x.*exp(x.^2)];para=X\y3.多重回归(乘积回归)设要拟合:y=a+b*x+c*t,其中x和t是预测变量,y是响应变量。
设计矩阵为X=[ones(size(x)) x t] %注意x,t大小相等!para=X\ypolyfit函数polyfit函数不需要输入设计矩阵,在参数估计中,polyfit会根据输入的数据生成设计矩阵。
1.假设要拟合的多项式是:y=a+b*x+c*x^2p=polyfit(x,y,2)然后可以使用polyval在t处预测:y_hat=polyval(p,t)polyfit函数可以给出置信区间。
[p S]=polyfit(x,y,2) %S中包含了标准差[y_fit,delta] = polyval(p,t,S) %按照拟合模型在t处预测在每个t处的95%CI为:(y_fit-1.96*delta, y_fit+1.96*delta)2.指数模型也适应假设要拟合:y = a+b*exp(x)+c*exp(x.?2)p=polyfit(x,log(y),2)fminsearch函数fminsearch是优化工具箱的极小化函数。
matlab加权最小二乘法拟合编程

一、概述最小二乘法(Least Squares Method)是一种常用的数学优化方法,通过最小化残差的平方和来拟合实际数据与理论模型之间的关系。
在实际应用中,我们常常需要对数据进行加权处理,以提高拟合效果和准确度。
而Matlab作为一种强大的数学建模和仿真软件,提供了丰富的函数和工具来实现加权最小二乘法的拟合编程。
二、加权最小二乘法原理1. 最小二乘法原理最小二乘法是一种常用的拟合方法,通过最小化实际观测值和理论值之间的误差来寻找最佳拟合曲线或曲面。
其数学表达为:minimize ||Ax - b||^2其中A为设计矩阵,x为拟合参数,b为观测值向量。
最小二乘法可以看作是一种优化问题,通过求解参数x的最优值来实现最佳拟合。
2. 加权最小二乘法原理在实际情况下,我们往往会遇到观测值有不同的权重或方差的情况,此时可以使用加权最小二乘法来提高拟合效果。
加权最小二乘法的数学表达为:minimize ||W^(1/2)(Ax - b)||^2其中W为权重矩阵,将不同观测值的权重考虑在内,通过加权的方式来优化拟合效果。
三、Matlab实现加权最小二乘法1. 数据准备在进行加权最小二乘法的拟合编程前,首先需要准备实际观测数据和设计矩阵A。
还需要考虑观测值的权重矩阵W,根据实际情况来确定不同观测值的权重。
2. 加权最小二乘法函数Matlab提供了丰富的函数和工具来实现加权最小二乘法的拟合。
其中,可以使用lsqcurvefit或lsqnonlin等函数来进行加权最小二乘法的拟合计算。
通过传入设计矩阵A、观测值向量b和权重矩阵W,以及拟合参数的初始值,来实现加权最小二乘法的拟合计算。
3. 拟合结果评估完成加权最小二乘法的拟合计算后,我们需要对拟合结果进行评估。
主要包括残差分析、拟合效果的可视化等方面。
通过分析残差的分布和拟合曲线与实际观测值的符合程度,来评估拟合效果的优劣。
四、实例分析1. 示例一:线性模型拟合假设我们有一组线性关系的实际观测数据,且各观测值具有不同的权重。
基于Matlab实现最小二乘曲线拟合
基于Matlab实现最小二乘曲线拟合一、本文概述在数据分析和科学计算中,曲线拟合是一种常见且重要的技术。
通过拟合,我们可以根据已知数据建立数学模型,预测未知数据,以及深入理解数据背后的规律。
最小二乘法是曲线拟合中最常用的一种方法,其原理是通过最小化预测值与实际值之间的平方误差来寻找最佳拟合曲线。
本文旨在介绍如何使用Matlab这一强大的数学计算软件,实现最小二乘曲线拟合,包括其理论基础、实现步骤以及实际应用案例。
通过本文的学习,读者将能够掌握在Matlab环境中进行最小二乘曲线拟合的基本方法,提高数据处理和分析能力。
二、最小二乘曲线拟合原理最小二乘法(Least Squares Method)是一种数学优化技术,它通过最小化误差的平方和来寻找数据的最佳函数匹配。
在曲线拟合中,最小二乘法被广泛应用于通过一组离散的数据点来估计一个连续函数的形状。
这种方法的基本思想是通过选择一个模型函数(通常是多项式、指数函数、对数函数等),使得该模型函数与实际数据点之间的差距(即残差)的平方和最小。
假设我们有一组数据点 ((x_1, y_1), (x_2, y_2), \ldots,(x_n, y_n)),我们希望通过一个模型函数 (y = f(x, \mathbf{p})) 来拟合这些数据点,其中 (\mathbf{p}) 是模型的参数向量。
最小二乘法的目标就是找到最优的参数向量 (\mathbf{p}^*),使得残差平方和 (S(\mathbf{p})) 最小:S(\mathbf{p}) = \sum_{i=1}^{n} [y_i - f(x_i,\mathbf{p})]^2]为了使 (S(\mathbf{p})) 达到最小,我们需要对(S(\mathbf{p})) 求偏导数,并令其等于零。
这样,我们就得到了一个关于 (\mathbf{p}) 的方程组。
解这个方程组,就可以得到最优的参数向量 (\mathbf{p}^*)。
matlab 最小二乘 拟合系数

matlab 最小二乘拟合系数【最新版】目录1.MATLAB 简介2.最小二乘法原理3.MATLAB 中的最小二乘拟合4.拟合系数的求解5.总结正文【1.MATLAB 简介】MATLAB 是一种广泛使用的数学软件,它提供了强大的矩阵计算能力和各种数据分析工具。
在数据分析和信号处理领域,MATLAB 可以方便地完成复杂的计算任务,使得用户可以更加专注于理论研究和算法设计。
【2.最小二乘法原理】最小二乘法是一种数学优化技术,它的基本原理是寻找一条直线,使得所有数据点到这条直线的垂直距离之和最小。
对于线性拟合问题,最小二乘法可以求解出最佳拟合直线,而对于非线性拟合问题,最小二乘法可以求解出最佳拟合曲线。
【3.MATLAB 中的最小二乘拟合】在 MATLAB 中,可以使用 polyfit 函数进行最小二乘拟合。
polyfit 函数可以对一组数据点进行多项式拟合,从而得到最佳拟合曲线。
polyfit 函数的语法为:p = polyfit(x, y, n),其中 x 和 y 是数据点的横纵坐标,n 是最小二乘拟合的阶数。
【4.拟合系数的求解】在使用 polyfit 函数进行最小二乘拟合后,我们可以得到拟合曲线的系数,这些系数即为拟合系数。
拟合系数可以反映拟合曲线与数据点之间的拟合程度,拟合系数的误差可以衡量拟合效果的好坏。
在 MATLAB 中,我们可以使用 polyval 函数计算拟合系数的误差。
【5.总结】MATLAB 中的最小二乘拟合功能为数据分析和信号处理提供了强大的工具,用户可以方便地使用 polyfit 函数进行最小二乘拟合,并求解出拟合系数。
matlab-最小二乘法数据拟合
定义:最小二乘法(又称最小平方法)是一种数学优化技术。
它通过最小化误差的平方和寻找数据的最佳函数匹配。
利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小。
最小二乘法还可用于曲线拟合。
其他一些优化问题也可通过最小化能量或最大化熵用最小二乘法来表达。
最小二乘法原理:在我们研究两个变量(x,y)之间的相互关系时,通常可以得到一系列成对的数据(x1,y1.x2,y2... xm,ym);将这些数据描绘在x -y直角坐标系中,若发现这些点在一条直线附近,可以令这条直线方程如(式1-1)。
Yj= a0 + a1 X (式1-1)其中:a0、a1 是任意实数1.多项式曲线拟合:polyfit1.1常见拟合曲线:直线:y=a0X+a1多项式:一般次数不易过高2 3双曲线:y=a0/x+a1指数曲线:y=a*e^b1.2 matlab中函数P=polyfit(x,y,n)[P S mu]=polyfit(x,y,n)polyval(P,t):返回n次多项式在t处的值注:其中x y已知数据点向量分别表示横纵坐标,n为拟合多项式的次数,结果返回:P-返回n次拟合多项式系数从高到低依次存放于向量P中,S-包含三个值其中normr是残差平方和,mu-包含两个值 mean(x)均值,std (x)标准差。
1.3举例1. 已知观测数据为:X:0 1 2 3 4 56 7 8 9 1Y:-0.447 1.987 3.28 6.16 7.08 7.34 7.66 9.569.48 9.3 11.2用三次多项式曲线拟合这些数据点:x=0:0.1:1y=[-0.447,1.978,3.28,6.16,7.08,7.34,7.66,9.56,9.48, 9.3,11.2]plot(x,y,'k.','markersize',25)hold onaxis([0 1.3 -2 16])p3=polyfit(x,y,3)t=0:0.1:1.2:S3=polyval(P3,t);plot(t,S3,'r');2.拟合为指数曲线注:在对已测数据不太明确满足什么关系时,需要假设为多种曲线拟合然后比较各自的residal(均方误差)越小者为优,多项式拟合不是拟合次数越高越好,而是残差越小越好。
matlab 最小二乘拟合直线

一、概述Matlab是一种功能强大的计算机软件,广泛应用于工程、科学和数学领域。
其中,最小二乘法是一种常用的数学拟合方法,能够通过最小化数据点到拟合曲线的垂直距离来找到最佳拟合直线。
二、最小二乘拟合直线原理1. 最小二乘法是一种数学优化技术,用于拟合和分析数据。
在拟合直线的问题中,最小二乘法能够找到一条直线,使得该直线到各个数据点的垂直距离之和最小。
2. 拟合直线一般用线性方程表示:y = mx + b,其中m为直线的斜率,b为直线的截距。
通过最小二乘法,可以通过数据点的坐标来求解出最佳的斜率m和截距b。
三、Matlab实现最小二乘拟合直线1. 在Matlab中,可以使用polyfit函数来进行最小二乘拟合直线的计算。
该函数的语法为:p = polyfit(x, y, n),其中x和y为输入的数据点坐标,n为拟合的多项式阶数。
在拟合直线的情况下,n取1即可。
2. polyfit函数会返回拟合直线的斜率和截距,分别对应于p(1)和p(2)。
通过这两个参数,就可以得到最佳拟合直线的方程形式。
四、示例代码以下是一个简单的示例代码,演示了如何使用Matlab进行最小二乘拟合直线:``` matlab输入数据点坐标x = [1, 2, 3, 4, 5];y = [2, 3, 3.5, 4, 5];使用polyfit函数进行拟合p = polyfit(x, y, 1);获取拟合直线的斜率和截距m = p(1);b = p(2);打印拟合直线方程fprintf('拟合直线方程为:y = .2fx + .2f\n', m, b);```五、总结通过最小二乘法拟合直线,可以更好地理解数据点的分布趋势,并且可以为后续的数据分析和预测提供参考。
Matlab作为一款强大的计算工具,能够快速、准确地进行最小二乘拟合直线的计算,并为科研工作者和工程师们提供了便利的数据分析工具。
希望读者通过本文的介绍,能够更加深入地理解最小二乘拟合直线的原理和在Matlab中的实现方法。
最小二乘拟合平面和直线matlab

最⼩⼆乘拟合平⾯和直线matlab利⽤Matlab实现直线和平⾯的拟合1、直线拟合的matlab代码% Fitting a best-fit line to data, both noisy and non-noisyx = rand(1,10);n = rand(size(x)); % Noisey = 2*x + 3; % x and y satisfy y = 2*x + 3yn = y + n; % x and yn roughly satisfy yn = 2*x + 3 due to the noise % Determine coefficients for non-noisy line y=m1*x+b1 Xcolv = x(:); % Make X a column vectorYcolv = y(:); % Make Y a column vectorConst = ones(size(Xcolv)); % Vector of ones for constant term Coeffs = [Xcolv Const]\Ycolv; % Find the coefficientsm1 = Coeffs(1);b1 = Coeffs(2);% To fit another function to this data, simply change the first% matrix on the line defining Coeffs% For example, this code would fit a quadratic% y = Coeffs(1)*x^2+Coeffs(2)*x+Coeffs(3)% Coeffs = [Xcolv.^2 Xcolv Const]\Ycolv;% Note the .^ before the exponent of the first term% Plot the original points and the fitted curvefigureplot(x,y,'ro')hold onx2 = 0:0.01:1;y2 = m1*x2+b1; % Evaluate fitted curve at many pointsplot(x2, y2, 'g-')title(sprintf('Non-noisy data: y=%f*x+%f',m1,b1))% Determine coefficients for noisy line yn=m2*x+b2Xcolv = x(:); % Make X a column vectorYncolv = yn(:); % Make Yn a column vectorConst = ones(size(Xcolv)); % Vector of ones for constant term NoisyCoeffs = [Xcolv Const]\Yncolv; % Find the coefficients m2 = NoisyCoeffs(1);b2 = NoisyCoeffs(2);% Plot the original points and the fitted curvefigureplot(x,yn,'ro')hold onx2 = 0:0.01:1;yn2 = m2*x2+b2;plot(x2, yn2, 'g-')title(sprintf('Noisy data: y=%f*x+%f',m2,b2))2、平⾯拟合matlab代码x = rand(1,10);y = rand(1,10);z = (3-2*x-5*y)/4; % Equation of the plane containing% (x,y,z) points is 2*x+5*y+4*z=3Xcolv = x(:); % Make X a column vectorYcolv = y(:); % Make Y a column vectorZcolv = z(:); % Make Z a column vectorConst = ones(size(Xcolv)); % Vector of ones for constant termCoefficients = [Xcolv Ycolv Const]\Zcolv; % Find the coefficientsXCoeff = Coefficients(1); % X coefficientYCoeff = Coefficients(2); % X coefficientCCoeff = Coefficients(3); % constant term% Using the above variables, z = XCoeff * x + YCoeff * y + CCoeffL=plot3(x,y,z,'ro'); % Plot the original data pointsset(L,'Markersize',2*get(L,'Markersize')) % Making the circle markers larger set(L,'Markerfacecolor','r') % Filling in the markers hold on[xx, yy]=meshgrid(0:0.1:1,0:0.1:1); % Generating a regular grid for plotting zz = XCoeff * xx + YCoeff * yy + CCoeff;surf(xx,yy,zz) % Plotting the surfacetitle(sprintf('Plotting plane z=(%f)*x+(%f)*y+(%f)',XCoeff, YCoeff, CCoeff)) % By rotating the surface, you can see that the points lie on the plane% Also, if you multiply both sides of the equation in the title by 4,% you get the equation in the comment on the third line of this example如何⽤matlab最⼩⼆乘法进⾏平⾯拟合MATLAB软件提供了基本的曲线拟合函数的命令:多项式函数拟合: a = polyfit(xdata,ydata,n)其中n表⽰多项式的最⾼阶数,xdata,ydata 为要拟合的数据,它是⽤数组的⽅式输⼊。
matlab最小二乘拟合并计算r

主题:如何使用Matlab进行最小二乘拟合并计算r内容:一、介绍最小二乘拟合的概念1. 最小二乘拟合是一种常见的数据拟合方法,通过最小化实际观测值与拟合值之间的误差平方和来找到最优拟合函数。
2. 在Matlab中,可以利用内置的polyfit函数来进行最小二乘拟合,该函数可以拟合出任意阶的多项式。
二、Matlab中的polyfit函数介绍1. polyfit函数的基本语法为:p = polyfit(x, y, n),其中x和y分别为数据点的横纵坐标,n为拟合的多项式阶数。
2. polyfit函数返回一个包含拟合系数的向量p,该向量可以用来构建拟合多项式。
三、如何使用polyfit进行最小二乘拟合1. 需要准备实验或观测数据,并将其存储在Matlab的变量中。
2. 接下来,利用polyfit函数对数据进行拟合,得到拟合系数向量p。
3. 利用polyval函数结合拟合系数p,可以得到拟合的函数值,进而绘制拟合曲线。
四、如何计算拟合优度r1. 在进行最小二乘拟合之后,我们希望了解拟合曲线与实际数据的拟合程度,这时就需要计算拟合优度r。
2. 在Matlab中,可以利用相关系数来评估拟合优度,相关系数r的取值范围在-1到1之间,一般来说,r越接近1,拟合效果越好。
3. 使用相关系数函数corrcoef可以方便地计算拟合优度r。
五、示例演示1. 为了更直观地理解如何使用Matlab进行最小二乘拟合以及计算r,我们将给出一个具体的示例演示。
2. 在示例中,我们将使用polyfit函数对一组人口增长数据进行拟合,并利用相关系数函数corrcoef计算拟合优度r。
六、总结1. 最小二乘拟合是一种常见的数据拟合方法,Matlab提供了丰富的函数库来支持最小二乘拟合的实现。
2. 在进行最小二乘拟合之后,计算拟合优度r可以帮助我们评估拟合效果,为数据分析和实际应用提供参考。
文章结尾从以上内容我们可以看出,Matlab作为一款功能强大的数据分析工具,对于最小二乘拟合和相关系数的计算都提供了便捷的函数支持。
matlab最小二乘法拟合求参数
matlab最小二乘法拟合求参数
最小二乘法是一种数据拟合的常用方法,可以求得一组参数使得拟合函数与给定数据的残差平方和最小。
在Matlab中,可以通过以下步骤求解最小二乘法拟合的参数:
1. 输入数据:首先,将需要拟合的数据输入到Matlab中,例如,可以创建两个向量x和y来表示一组二维数据。
2. 选择拟合函数:根据数据的特点选择一个合适的拟合函数形式,例如,线性、二次、指数等。
假设选择线性拟合y = a*x + b。
3. 构建拟合方程:根据选择的拟合函数形式,构建拟合方程,即根据给定的数据和参数a、b,计算预测的y值。
4. 残差计算:计算预测值与实际值之间的差异,即残差。
可以使用Matlab的内置函数或者编写自定义函数来计算残差。
5. 残差平方和最小化:根据最小二乘法的原理,目标是使得残差平方和最小化。
可以使用Matlab的内置函数或者编写自定义函数来求解最小二乘法的参数。
6. 求解参数:使用最小化残差平方和的方法,求解拟合方程的参数。
在Matlab中,可以使用lsqcurvefit函数或者lsqnonlin函数等进行求解。
7. 结果评估:根据求解得到的参数,计算拟合方程在给定数据上的拟合度,可以计算相关系数等来评估拟合效果。
以上就是使用Matlab进行最小二乘法拟合求解参数的一般步骤。
具体的实现方法可以根据数据和拟合函数的不同进行调整和优化。
用MatLab画图(最小二乘法做曲线拟合)
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 用MatLab画图(最小二乘法做曲线拟合) 用 MatLab 画图(最小二乘法做曲线拟合) 帮朋友利用实验数据画图时,发现 MatLab 的确是画图的好工具,用它画的图比Excel光滑、精确。
利用一组数据要计算出这组数据对应的函数表达式从而得到相应图像,MatLab 的程序如下:x=[1 5 10 20 30 40 60 80] y=[15. 4 33. 9 42. 2 50. 556 62. 7 72 81. 1] plot(x, y, ‘ r*’ ) ; legend(‘ 实验数据(xi, yi) ‘ ) xlabel(‘ x’ ) , ylabel(‘ y’ ) , title(‘ 数据点(xi, yi) 的散点图’ ) syms a1 a2 a3 x=[15 10 20 30 40 60 80]; fi=a1. *x. +a2. *x+a3 y=[15. 4 33.9 42. 2 50. 5 56 62. 7 72 81. 1] fi =[a1+a2+a3,25*a1+5*a2+a2+(400*a1+20*a2+a3-101/2) +(900*a1+30*a2+a3-56) +(1600*a1+40*a2+a3-627/10) +(3600*a1+60*a2+a3-72)+(6400*a1+80*a2+a3-811/10) ; Ja1=diff(J, a1) ;Ja2=diff(J, a2) ; Ja3=diff(J, a3) ; Ja11=simple(Ja1) ,Ja21=simple(Ja2) , Ja31=simple(Ja3) A=[114921252, 1656252, 26052; 1656252, 26052, 492; 26052, 492, 16]; B=[9542429/5, 166129/5, 4138/5]; C=B/A, f=poly2sym(C) xi=[1 5 10 20 3040 60 80] ; y=[15. 4 33. 9 42. 2 50. 5 56 62. 7 72 81. 1]; n=length(xi) ; f=-0. 0086. *xi. +1. 3876. *xi+23. 1078;1 / 6x=1: 1/10: 80; F=-0. 0086. *x. +1. 3876. *x+23. 1078; fy=abs(f-y) ; fy2=fy. ; Ew=max(fy) , E1=sum(fy) /n,E2=sqrt((sum(fy2) ) /n) plot(xi, y, ‘ r*’ ) , hold on, plot(x, F, ‘ b-’ ) , hold off legend(‘ 数据点(xi, yi) ‘ , ‘ 拟合曲线f(x) = -0. 0086x +1. 3876x+23. 1078’ ) , xlabel(‘ x’ ) , ylabel(‘ y’ ) , title(‘ 实验数据点(xi, yi) 及拟合曲线f(x) ‘ ) 下图是程序运行后得到的:Su7Tw8VxaW ybXAcZB d#Cf!Eg%FhGj*Ik(Jl-Kn+M o0Np2Or3Ps4R t6Sv7Tw8VxaWzbXAcZBe#Cf! Eg%Fi Gj*Ik)Jl-Kn+Mo1Np2Or3Qs4Rt6Sv7 Uw8Vx aWzbYAc ZBe#Df!Eg%FiHj*Ik) Jm-Kn +Mo1Nq2Or3Qs 5Rt6Sv7Uw9VxaWzbYAdZBe#D f$Eg%F iHj(I k) Jm-Ln+Mo1Nq2Pr3Qs5Ru6S v7Uw9V yaWzbY AdZCe#Df$Eh%FiHj(Il) Jm-Ln0Mo1Nq2Pr4 Qs5Ru6Tv8Uw9VyaXzbYAdZCe !Df$Eh %GiHj (Il) Km-Ln0Mp1Nq2Pr4Qt5Ru 6Tv8U x9VyaXz cYAdZCe! Dg$Eh%Gi*Hj(Il) Km+Ln0M p1Oq2P r4Qt5Su6Tv8Ux9WyaXzcYBdZ Ce!Dg$Fh%Gi* Hk(Il) Km+Lo0Mp1Oq3Pr4Qt5 Su7Tv8Ux9Wyb XzcYBd#Ce!Dg$FhGi*Hk(Jl ) Km+L o0Np1Oq 3Ps4Rt 5Su7Tw8Ux9WybXAcY Bd#Cf!Dg$FhGj*Hk(Jl-Km+Lo0Np2Oq3Ps4 Rt6Su7Tw8Vx9 WybXAcZBd#Cf!Eg$FhGj*Ik (Jl-Kn +Lo0Np2Or3Ps4Rt6Sv7Tw8VxaWybXA cZBe#Cf!Eg%F hGj*Ik) Jl-K n+Mo0Np2Or3Q s4Rt6Sv 7Uw8V xaWzbXAcZBe# D f! Eg%FiGj* Ik) Jm- Kn+Mo1 Nq2Or3Qs5Rt6Sv7Uw9VxaWzb YAcZBe#Df$Eg %FiHj*Ik)---------------------------------------------------------------最新资料推荐------------------------------------------------------ Jm-Ln+Mo1Nq2Pr 3Qs5Ru 6Sv7Uw 9VyaWzbYAdZBe#Df$Eh%FiH j(Ik) J m-Ln0M o1Nq2Pr4Qs5Ru6Tv7Uw9VyaX zbYAdZC e#Df$ Eh%GiHj(Il) Jm-Ln0Mp1Nq2 Pr4Qt5Ru6Tv8 Uw9VyaXzcYAdZCe!Df$Eh%Gi *Hj(Il) Km+Ln 0Mp1Oq2Pr4Qt5Su6Tv8Ux9Vy aXzcYB dZCe!D g$Eh%Gi*Hk(Il) Km+Lo0Mp1O q3Pr4Qt5Su7Tv8Ux9WyaXzc Y Bd#Ce!Dg$Fh %Gi*Hk( Jl) Km +Lo0Np1Oq3Ps 4 Qt5Su7Tw8Ux 9WybXzcYBd#C f!Dg$FhGi*H k (Jl-Km+Lo0N p2Oq3Ps4Rt5S u7Tw8Vx9WybX AcYBd#Cf! Eg$ FhGj*Ik (Jl- Kn+Lo0Np2Or3 P s4Rt6Su7Tw8 VxaWybXA cZBd #Cf!Eg%FhGj * Ik) Jl-Kn+Mo 0Np2Or3Qs4Rt 6Sv7Tw8VxaWz bXAcZBe#Cf!E g%FiGj*Ik) J m-Kn+Mo1Np2O r 3Qs5Rt6Sv7U w8VxaWzbYAcZ Be#Df! Eg%Fi H j*Ik) Jm-Ln+ Mo1Nq2O r3Qs5 Ru6Sv7Uw9Vxa W zbYAdZBe#Df $Eh%Fi Hj(Ik ) Jm-Ln0Mo1Nq 2Pr3Qs5Ru6Tv 7Uw9Vya WzbYA dZCe#Df$Eh%G iHj(Il) Jm-L n0Mp1Nq2Pr4Q s5Ru6Tv8Uw9V ya XzbYAdZCe! Df$Eh%Gi*Hj( Il) Km-Ln0Mp1 Oq 2Pr4 Qt5Ru6Tv8Ux9Vy aXz cYAdZCe!Dg$E h%G i*Hk(Il) K m+Ln0Mp1O q3P r4Qt5Su6Tv8U x9WyaXzcYBd# Ce!Dg$Fh% Gi* Hk(Jl) Km+Lo0 Mp1Oq3Ps4Qt5 Su7Tv8Ux9Wyb XzcYBd#Cf! Dg $F hGi*Hk(Jl -Km+Lo0N p1Oq 3Ps4Rt5Su7Tw 8U x9WybXAcYB d#Cf!Eg$F hG j*Hk(Jl-Kn+Lo0Np2O q3Ps4Rt 6Su7Tw8Vx9WybXAcZBd#Cf!E g%FhGj*Ik(J l-Kn+Mo0Np2O r3Ps4Rt6Sv7T w8Vxa WzbXAcZ Be#Cf! Eg%Fi Gj*Ik) Jl-Kn+ Mo1Np2Or3Qs4 Rt6Sv7Uw8VxaWzbYAcZBe#Df !Eg%FiHj*Ik )3 / 6Jm-Kn+Mo1Nq2Or3Qs5Rt6Sv 7Uw9Vx aWzbYA dZBe#Df$Eg%FiHj(Ik) Jm-L n+Mo1Nq2Pr3Q s5Ru6Sv7Uw9VyaWzbYAdZCe# Df$Eh %FiHj( Il) Jm-Ln0Mo1Nq2Pr4Qs5Ru6 Tv8Uw9VyaXzb YAdZCe!Df$Eh%GiHj(Il) Km -Ln0Mp 1Nq2Pr 4Qt5Ru6Tv8Ux9VyaXzcYAdZC e!Dg$E h%Gi*H j(Il) Km+Ln0Mp1Oq2Pr4Qt5S u6Tv8U x9WyaX zcYBdZCe! Dg$Fh%Gi*Hk(Il) Km+Lo0Mp1Oq3 Pr4Qt5Su7Tv8Ux9WybXzcYBd #Ce!D g$FhGi *Hk(Jl ) Km+Lo0Np1Oq3Ps4R t5Su7Tw8Ux9T v7Uw9VyaXzbYAdZCe#Df$Eh% GiHj( Il) Jm- Ln0Mp1Nq2Pr4Qs5Ru6Tv8Uw9 VyaXzcY AdZCe !Df$Eh%Gi*Hj(Il) Km-Ln0Mp 1Oq2Pr 4Qt5Ru 6Tv8Ux9VyaXzcYBdZCe! Dg$E h%Gi*Hk(Il) K m+Ln0Mp1Oq3Pr4Qt5Su6Tv8U x9WyaX zcYBd# Ce!Dg$Fh%Gi*Hk(Jl) Km+Lo0 Mp1Oq3P s4Qt5 Su7Tw8Ux9Wyb X zcYBd#Cf!Dg $FhGi*Hk(Jl -Km+Lo0Np1Oq3Ps4Rt5Su7Tw 8Vx9Wy bXAcYB d#Cf! Eg$FhGj*Hk(Jl-Kn+L o0Np2O q3Ps4R t6Su7Tw8VxaWybXAcZBd#Cf! Eg%Fh Gj*Ik( Jl-Kn+Mo0Np2Or3Ps4Rt6Sv7 Tw8Vxa WzbXAc ZBe#Cf!Eg%FiGj*Ik) Jl-Kn +Mo1Np2Or3Qs 5Rt6Sv7Uw8Vx a WzbYAcZBe#D f! Eg%FiHj*Ik) Jm-Kn+Mo1 Nq 2Or3Qs5Ru6 Sv7Uw9Vx aWzb YAdZBe#Df$Eg %F iHj(Ik) Jm -Ln+Mo1N q2Pr 3Qs5Ru6Tv7Uw 9VyaWzbYAdZC e#Df$Eh%FiH j(Il) Jm-Ln0M o1Nq2Pr4Qs5R u6Tv8Uw9VyaX zbYAdZCe! Df$ E h%GiHj(Il) Km-Ln0Mp 1Oq2 Pr4Qt5Ru6Tv8 U x9VyaXzcYAd ZCe!Dg$E h%Gi *Hj(Il) Km+Ln 0Mp1Oq3Pr4Qt 5Su6Tv8Ux9Wy aXzcYBdZCe!D g $Fh%Gi*Hk(I l)---------------------------------------------------------------最新资料推荐------------------------------------------------------ Km+Lo0Mp1O q3Ps4Qt5Su7T v 8Ux9WybXzcY Bd#Ce! D g$Fh Gi*Hk(Jl) Km+ L o0Np1Oq3Ps4 Rt5Su7T w8Ux9 WybXAcYBd#Cf !Dg$FhGj*Hk (Jl-Km+ Lo0Np 2Oq3Ps4Rt6Su 7Tw8Vx9WybXA cZBd#Cf ! Eg$F hGj*Ik(Jl-K n+Mo0Np2Or3P s4Rt6Sv 7Tw8V xaWybXAcZBe# C f!Eg% FhGj*Ik) Jl-K n+Mo 1Np2Or3Qs4Rt 6Sv 7Uw8VxaWz bXAcZBe#D f!E g%FiGj*Ik) J m- Kn+Mo1Nq2O r3Qs5Rt6Sv7U w9VxaWzbYAcZ Be#Df$Eg%Fi Hj*Ik) Jm-Ln+ Mo1Nq2Pr3Qs5 Ru6Sv7Uw9Vya WzbYAdZBe#Df $Eh%FiHj(Il ) Jm -Ln0Mo1Nq 2Pr4Qs5Ru 6Tv 7Uw9VyaXzbYA dZCe#Df$Bd#C f! Eg%FhGj*I k(Jl-Kn+Mo0Np2O r3Qs4Rt 6Sv7Tw8VxaWzbXAcZBe#Cf!E g%FiGj*Ik) J l-Kn+Mo1Np2O r3Qs5Rt6Sv7U w8Vxa WzbYAcZ Be#Df! Eg%Fi Hj*Ik) Jm-Kn+ Mo1Nq2Or3Qs5 Ru6Sv7Uw9VxaWzbYAdZBe#Df $Eg%FiHj(Ik ) Jm-Ln0Mo1Nq2Pr3Qs5Ru6Tv 7Uw9Vy aWzbYA dZCe#Df$Eh%FiHj(Il) Jm-L n0Mp1Nq2Pr4Q s5Ru6Tv8Uw9VyaXzbYAdZCe! Df$Eh %GiHj( Il) Km-Ln0Mp1Oq2Pr4Qt5Ru6 Tv8Ux9VyaXzc YAdZCe!Dg$Eh%Gi*Hj(Il) Km +Ln0Mp 1Oq3Pr 4Qt5Su6Tv8Ux9WyaXzcYBdZC e!Dg$F h%Gi*H k(Jl) Km+Lo0Mp1Oq3Ps4Qt5S u7Ts5R u6Sv7U w9VyaWzbYAdZBe#Df$Eh%Fi Hj(Ik)Jm-Ln0 Mo1Nq2Pr4Qs5Ru6Tv7Uw9Vya XzbYA dZCe#Df $Eh%Gi Hj(Il) Jm-Ln0Mp1N q2Pr4Qt5Ru6T v8Uw9VyaXzcYAdZCe!Df$Eh% Gi*Hj( Il) Km- Ln0Mp1Oq2Pr4Qt5Su6Tv8Ux9 VyaXzcY BdZCe !Dg$Eh%Gi*Hk(Il) Km+Ln0Mp 1Oq3Pr4Qt5Su5 / 67Tv8Ux9WyaXzcYBd#Ce! Dg$F h%Gi*Hk (Jl) K m+Lo0Np1Oq3Ps4Qt5Su7Tw8U x9WybX zcYBd# Cf!Dg$FhGi*Hk(Jl-Km+Lo0 Np2Oq3Ps4Rt5 Su7Tw8Vx9WybXAcYBd#Cf!Eg $FhGj*Hk(Jl -Kn+Lo0Np2Or3Ps4Rt6Su7Tw 8VxaWy bXAcZB d#Cf! Eg%FhG j*Ik(Jl-Kn+M o0Np2O r3Qs4R t6Sr4Qt5Su6Tv8Ux9WyaXzcY BdZCe!Dg$Fh% Gi*Hk(Il) Km+Lo0Mp1Oq3Pr4 Qt5Su7Tv8Ux9 WybXzcYBd#Ce! Dg$FhGi*Hk (Jl) Km +Lo0Np 1Oq3Ps4Rt5Su7Tw8Ux9WybXA cYBd#Cf!Dg$FhGj*Hk(Jl- K m+Lo0Np2Oq3 Ps4Rt6Su7Tw8 Vx9WybXAcZBd # Cf!Eg$FhGj *Ik(Jl- Kn+Lo 0Np2Or3Ps4Rt 6Sv7Tw8VxaWy bXAcZBe#Cf!E g%FhGj*Ik) J l-Kn+Mo0Np2O r3Qs4Rt6Sv7U w8VxaWzbXAcZ B e#Df!Eg%Fi Gj*Ik) J m-Kn+ Mo1Nq2Or3Qs5 R t6Sv7Uw9Vxa WzbYAcZB e#Df $Eg%Ff! Dg$Fh Gi*Hk(Jl-Km +Lo0Np1Oq3Ps 4Rt5Su7Tw8Vx 9W ybXAcYBd#C f!Eg$Fh Gj*H k(Jl-Kn+Lo0N p2Oq3Ps4Rt6S u7Tw8Vxa WybX AcZBd#Cf!Eg% F hGj*Ik(Jl- Kn+Mo0N p2Or3 Ps4Rt6Sv7Tw8 V xaWzbXAcZBe #Cf!Eg% FiGj *Ik) Jl-Kn+Mo 1Np2Or3Qs5Rt 6Sv7Uw8V xaWz bYAcZBe#Df!E g%FiHj*Ik) J m-Kn+Mo1Nq2O r3Qs5Ru6Sv7U w9VxaW zbYAdZBe#Df$Eg %Fi Hj(Ik) Jm-Ln +M o1Nq2Pr3Qs 5Ru6Tv7U w9Vy aWzbYAdZCe#D f$Eh%FiHj(I l) Jm-Ln0Mo1N q2Pr4Qs5Or3P s4Rt6Su7Tw8V xaWybXAcZ Be# Cf! Eg%FhGj* I。
空间直线最小二乘法 matlab

根据您的要求,我会提供有关空间直线最小二乘法在Matlab中的应用的文章。
1.概述作为一种常见的数据拟合方法,最小二乘法被广泛应用于各种领域。
在空间几何中,直线的最小二乘法可以帮助我们找到最拟合一组点的直线方程,这在工程、地理学和计算机视觉等领域都具有重要意义。
而Matlab作为一种强大的数学软件,提供了丰富的工具和函数来实现空间直线最小二乘法。
本文将介绍在Matlab中如何实现空间直线最小二乘法,并通过示例进行说明。
2.空间直线最小二乘法原理在空间几何中,我们可以用直线的参数方程来表示一条直线:x = x0 + aty = y0 + btz = z0 + ct其中(x0, y0, z0)为直线上的一点,(a, b, c)为直线的方向向量,t为参数。
给定一组空间点(xi, yi, zi),我们希望找到最满足这组点的直线方程。
最小二乘法的思想是找到使得所有点到直线的距离之和最小的直线方程。
具体地,我们可以定义点(xi, yi, zi)到直线的距离为垂直距离d,即点到直线的垂直距离。
我们的目标是最小化所有点到直线的垂直距离之和,从而得到最拟合这组点的直线方程。
3.空间直线最小二乘法的实现在Matlab中,我们可以使用“lsqcurvefit”函数来实现空间直线最小二乘法。
具体的步骤如下:步骤一:准备数据我们需要准备一组空间点(xi, yi, zi),这些点将作为直线拟合的数据。
可以通过手动输入数据或者从文件中读取数据来获得这些点。
步骤二:定义目标函数接下来,我们需要定义一个目标函数,该函数将作为最小二乘法的优化目标。
在本例中,我们的目标函数为点到直线的距离之和。
具体地,我们可以定义一个函数,该函数输入直线参数和空间点,输出点到直线的垂直距离。
步骤三:调用lsqcurvefit函数我们可以调用“lsqcurvefit”函数来实现最小二乘法的拟合过程。
该函数需要输入目标函数和初始参数,然后返回拟合后的直线参数。
最小二乘法曲线拟合_原理及matlab实现
曲线拟合(curve-fitting ):工程实践中,用测量到的一些离散的数据},...2,1,0),,{(m i y x i i =求一个近似的函数)(x ϕ来拟合这组数据,要求所得的拟合曲线能最好的反映数据的基本趋势(即使)(x ϕ最好地逼近()x f ,而不必满足插值原则。
因此没必要取)(i x ϕ=i y ,只要使i i i y x -=)(ϕδ尽可能地小)。
原理:给定数据点},...2,1,0),,{(m i y x i i =。
求近似曲线)(x ϕ。
并且使得近似曲线与()x f 的偏差最小。
近似曲线在该点处的偏差i i i y x -=)(ϕδ,i=1,2,...,m 。
常见的曲线拟合方法:1.使偏差绝对值之和最小2.使偏差绝对值最大的最小3.使偏差平方和最小最小二乘法:按偏差平方和最小的原则选取拟合曲线,并且采取二项式方程为拟合曲线的方法,称为最小二乘法。
推导过程:1. 设拟合多项式为:2. 各点到这条曲线的距离之和,即偏差平方和如下:3. 问题转化为求待定系数0a ...k a 对等式右边求i a 偏导数,因而我们得到了: .......4、 把这些等式化简并表示成矩阵的形式,就可以得到下面的矩阵:5. 将这个范德蒙得矩阵化简后可得到:6. 也就是说X*A=Y ,那么A = (X'*X)-1*X'*Y ,便得到了系数矩阵A ,同时,我们也就得到了拟合曲线。
MATLAB 实现:MATLAB 提供了polyfit ()函数命令进行最小二乘曲线拟合。
调用格式:p=polyfit(x,y,n)[p,s]= polyfit(x,y,n)[p,s,mu]=polyfit(x,y,n)x,y 为数据点,n 为多项式阶数,返回p 为幂次从高到低的多项式系数向量p 。
x 必须是单调的。
矩阵s 包括R (对x 进行QR 分解的三角元素)、df(自由度)、normr(残差)用于生成预测值的误差估计。
Matlab直线拟合和平面拟合
利用Matlab实现直线和平面的拟合2011-04-14 10:45:43| 分类:算法思想|举报|字号订阅直线和平面拟合是很常用的两个算法,原理非常简单。
但如果matlab不太熟的话,写起来也不是那么容易。
搜了很久才找到这两个代码,保存之,免得日后麻烦。
1、直线拟合的matlab代码% Fitting a best-fit line to data, both noisy and non-noisyx = rand(1,10);n = rand(size(x)); % Noisey = 2*x + 3; % x and y satisfy y = 2*x + 3yn = y + n; % x and yn roughly satisfy yn = 2*x + 3 due to the noise% Determine coefficients for non-noisy line y=m1*x+b1Xcolv = x(:); % Make X a column vectorYcolv = y(:); % Make Y a column vectorConst = ones(size(Xcolv)); % Vector of ones for constant termCoeffs = [Xcolv Const]\Ycolv; % Find the coefficientsm1 = Coeffs(1);b1 = Coeffs(2);% To fit another function to this data, simply change the first% matrix on the line defining Coeffs% For example, this code would fit a quadratic% y = Coeffs(1)*x^2+Coeffs(2)*x+Coeffs(3)% Coeffs = [Xcolv.^2 Xcolv Const]\Ycolv;% Note the .^ before the exponent of the first term% Plot the original points and the fitted curvefigureplot(x,y,'ro')hold onx2 = 0:0.01:1;y2 = m1*x2+b1; % Evaluate fitted curve at many pointsplot(x2, y2, 'g-')title(sprintf('Non-noisy data: y=%f*x+%f',m1,b1))% Determine coefficients for noisy line yn=m2*x+b2Xcolv = x(:); % Make X a column vectorYncolv = yn(:); % Make Yn a column vectorConst = ones(size(Xcolv)); % Vector of ones for constant termNoisyCoeffs = [Xcolv Const]\Yncolv; % Find the coefficientsm2 = NoisyCoeffs(1);b2 = NoisyCoeffs(2);% Plot the original points and the fitted curvefigureplot(x,yn,'ro')hold onx2 = 0:0.01:1;yn2 = m2*x2+b2;plot(x2, yn2, 'g-')title(sprintf('Noisy data: y=%f*x+%f',m2,b2))2、平面拟合matlab代码x = rand(1,10);y = rand(1,10);z = (3-2*x-5*y)/4; % Equation of the plane containing% (x,y,z) points is 2*x+5*y+4*z=3Xcolv = x(:); % Make X a column vectorYcolv = y(:); % Make Y a column vectorZcolv = z(:); % Make Z a column vectorConst = ones(size(Xcolv)); % Vector of ones for constant termCoefficients = [Xcolv Ycolv Const]\Zcolv; % Find the coefficientsXCoeff = Coefficients(1); % X coefficientYCoeff = Coefficients(2); % X coefficientCCoeff = Coefficients(3); % constant term% Using the above variables, z = XCoeff * x + YCoeff * y + CCoeffL=plot3(x,y,z,'ro'); % Plot the original data pointsset(L,'Markersize',2*get(L,'Markersize')) % Making the circle markers larger set(L,'Markerfacecolor','r') % Filling in the markershold on[xx, yy]=meshgrid(0:0.1:1,0:0.1:1); % Generating a regular grid for plotting zz = XCoeff * xx + YCoeff * yy + CCoeff;surf(xx,yy,zz) % Plotting the surfacetitle(sprintf('Plotting plane z=(%f)*x+(%f)*y+(%f)',XCoeff, YCoeff, CCoeff)) % By rotating the surface, you can see that the points lie on the plane% Also, if you multiply both sides of the equation in the title by 4,% you get the equation in the comment on the third line of this example如何用matlab最小二乘法进行平面拟合MATLAB软件提供了基本的曲线拟合函数的命令:多项式函数拟合: a = polyfit(xdata,ydata,n)其中n表示多项式的最高阶数,xdata,ydata 为要拟合的数据,它是用数组的方式输入。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用Matlab实现直线和平面的拟合1、直线拟合的matlab代码% Fitting a best-fit line to data, both noisy and non-noisyx = rand(1,10);n = rand(size(x)); % Noisey = 2*x + 3; % x and y satisfy y = 2*x + 3yn = y + n; % x and yn roughly satisfy yn = 2*x + 3 due to the noise % Determine coefficients for non-noisy line y=m1*x+b1Xcolv = x(:); % Make X a column vectorYcolv = y(:); % Make Y a column vectorConst = ones(size(Xcolv)); % Vector of ones for constant term Coeffs = [Xcolv Const]\Ycolv; % Find the coefficientsm1 = Coeffs(1);b1 = Coeffs(2);% To fit another function to this data, simply change the first% matrix on the line defining Coeffs% For example, this code would fit a quadratic% y = Coeffs(1)*x^2+Coeffs(2)*x+Coeffs(3)% Coeffs = [Xcolv.^2 Xcolv Const]\Ycolv;% Note the .^ before the exponent of the first term% Plot the original points and the fitted curvefigureplot(x,y,'ro')hold onx2 = 0:0.01:1;y2 = m1*x2+b1; % Evaluate fitted curve at many pointsplot(x2, y2, 'g-')title(sprintf('Non-noisy data: y=%f*x+%f',m1,b1))% Determine coefficients for noisy line yn=m2*x+b2Xcolv = x(:); % Make X a column vectorYncolv = yn(:); % Make Yn a column vectorConst = ones(size(Xcolv)); % Vector of ones for constant term NoisyCoeffs = [Xcolv Const]\Yncolv; % Find the coefficientsm2 = NoisyCoeffs(1);b2 = NoisyCoeffs(2);% Plot the original points and the fitted curvefigureplot(x,yn,'ro')hold onx2 = 0:0.01:1;yn2 = m2*x2+b2;plot(x2, yn2, 'g-')title(sprintf('Noisy data: y=%f*x+%f',m2,b2))2、平面拟合matlab代码x = rand(1,10);y = rand(1,10);z = (3-2*x-5*y)/4; % Equation of the plane containing% (x,y,z) points is 2*x+5*y+4*z=3Xcolv = x(:); % Make X a column vectorYcolv = y(:); % Make Y a column vectorZcolv = z(:); % Make Z a column vectorConst = ones(size(Xcolv)); % Vector of ones for constant termCoefficients = [Xcolv Ycolv Const]\Zcolv; % Find the coefficientsXCoeff = Coefficients(1); % X coefficientYCoeff = Coefficients(2); % X coefficientCCoeff = Coefficients(3); % constant term% Using the above variables, z = XCoeff * x + YCoeff * y + CCoeffL=plot3(x,y,z,'ro'); % Plot the original data pointsset(L,'Markersize',2*get(L,'Markersize')) % Making the circle markers larger set(L,'Markerfacecolor','r') % Filling in the markershold on[xx, yy]=meshgrid(0:0.1:1,0:0.1:1); % Generating a regular grid for plotting zz = XCoeff * xx + YCoeff * yy + CCoeff;surf(xx,yy,zz) % Plotting the surfacetitle(sprintf('Plotting plane z=(%f)*x+(%f)*y+(%f)',XCoeff, YCoeff, CCoeff)) % By rotating the surface, you can see that the points lie on the plane% Also, if you multiply both sides of the equation in the title by 4,% you get the equation in the comment on the third line of this example如何用matlab最小二乘法进行平面拟合MATLAB软件提供了基本的曲线拟合函数的命令:多项式函数拟合: a = polyfit(xdata,ydata,n)其中n表示多项式的最高阶数,xdata,ydata 为要拟合的数据,它是用数组的方式输入。
输出参数a为拟合多项式y = a1x n+ … + a n x + a n+1的系数a = [a1, …, a n, a n+1]。
多项式在x处的值y可用下面程序计算。
y = polyval (a, x)一般的曲线拟合:p = curvefit(‘Fun’p0,xdata,ydata)其中Fun表示函数Fun (p, xdata)的M-文件,p0表示函数的初值。
curvefit命令的求解问题形式是:min{p} sum {(Fun (p, xdata)-ydata).^2}若要求解点x处的函数值可用程序f = Fun(p, x) 计算。
例如已知函数形式y = ae - bx + ce – dx ,并且已知数据点(xi, yi), i = 1,2,…, n,要确定四个未知参数a, b, c, d。
使用curvefit命令,数据输入xdata = [x1,x2, …, xn]; ydata = [y1,y2, …, yn];初值输入p0 = [a0,b0,c0,d0]; 并且建立函数y = ae - bx + ce – dx的M-文件(Fun.m)。
若定义p1 = a, p2 = b, p3 = c, p4 = d , 则输出p = [p1, p2, p3, p4]。
引例求解:t=[1:16]; %数据输入y=[4 6.4 8 8.4 9.28 9.5 9.7 9.86 10 10.2 10.32 10.42 10.5 10.55 10.58 10.6];plot(t,y,'o') %画散点图p=polyfit(t,y,2) (二次多项式拟合)计算结果:p = -0.0445 1.0711 4.3252 %二次多项式的系数从而得到某化合物的浓度y与时间t的拟合函数:y = 4.3252+1.0711t – 0.0445t2对函数的精度如何检测呢?仍然以图形来检测,将散点与拟合曲线画在一个画面上。
xi=linspace(0,16,160);yi=polyval(p,xi);plot(x,y,'o',xi,yi)在MATLAB的NAG Foundation Toolbox中也有一些曲面拟合函数,如e02daf,e02cf,e02def可分别求出矩形网格点数据、散点数据的最小平方误差双三次样条曲面拟合,e02def等可求出曲面拟合的函数值。
用matlab的regress命令进行平面拟合以少量数据为例x = [1 5 6 3 7]';y = [2 9 3 5 8]';z = [4 3 5 11 6]';scatter3(x,y,z,'filled')hold on即可将散点绘制出来我们继续X = [ones(5,1) x y]; //5为size(x)b = regress(z,X) //拟合,其实是线性回归,但可以用来拟合平面。
regress命令还有其它用法,但一般这样就可以满足要求了。
于是显示出b =6.5642-0.1269-0.0381这就表示z = 6.5643 - 0.1269 * x - 0.0381 * y 是拟合出来的平面的方程下面把它绘制出来xfit = min(x):0.1:max(x); //注0.1表示数据的间隔yfit = min(y):0.1:max(y);[XFIT,YFIT]= meshgrid (xfit,yfit); //制成网格数据ZFIT = b(1) + b(2) * XFIT + b(3) * YFIT;mesh (XFIT,YFIT,ZFIT)这样,图就出来啦%r p q就是你的x,y,zr = randi(10,20,1);p = randi(10,20,1);q = randi(10,20,1);b = regress(r,[p q]);scatter3(r,p,q,'filled');hold onrfit = min(r):1:max(r);pfit = min(p):1:max(p);[RFIT PFIT] = meshgrid(rfit,pfit);QFIT = b(1) * RFIT + b(2) * PFIT;mesh(RFIT,PFIT,QFIT);view(60,10);这个程序有问题,只能拟合得到Z=AX+BY,得不到Z=AX+BY+D的形式%点X,Y,Z到平面Ax+By+Cz+D=0的距离为%d(ABCD,XYZ)=|AX+BY+CZ+D|/sqrt(A^2+B^2+C^2)%ABCD四个变量只有三个是互相独立的%设A=cos(a);B=sin(a)*cos(b);C=sin(a)*sin(b)%那么A^2+B^2+C^2=1,距离公式化简为%d(abc,XYZ)=|cos(a)*X+sin(a)*cos(b)*Y+sin(a)*sin(b)*Z+c|%现在有已知点序列X,Y,Z,求参数a b c%先构造一个函数fun(p) 输入参数为p,其中p(1)=a,p(2)=b,p(3)=c%使用lsqnonlin求得p,使得sum((fun(p))^2)最小fun=@(p) cos(p(1))*X+sin(p(1))*cos(p(2))*Y+sin(p(1))*sin(p(2))*Z+p(3);p = lsqnonlin(fun,[0 0 0]);A=cos(p(1));B=sin(p(1))*cos(p(2));C=sin(p(1))*sin(p(2));D=p(3);。