安川Σ V伺服驱动 SigmaWin调试实习
伺服实习报告

一、实习背景随着我国工业自动化技术的快速发展,伺服系统在工业自动化领域得到了广泛的应用。
为了更好地了解伺服系统的工作原理和应用,提高自己的实践操作能力,我参加了为期一个月的伺服实习。
二、实习目的1. 了解伺服系统的工作原理和组成;2. 掌握伺服系统的调试与维护方法;3. 提高自己的动手操作能力和团队协作能力;4. 将所学理论知识与实际应用相结合。
三、实习内容1. 伺服系统基础知识在实习初期,我学习了伺服系统的基础知识,包括伺服系统的组成、工作原理、控制方式等。
通过学习,我了解到伺服系统主要由伺服驱动器、伺服电机、编码器、控制器等组成,它们协同工作,实现对机械运动的精确控制。
2. 伺服系统调试在实习过程中,我参与了伺服系统的调试工作。
首先,根据实际需求,选择合适的伺服驱动器和伺服电机;然后,连接好各部件,进行硬件调试;最后,编写程序,实现运动控制。
在调试过程中,我学会了如何调整伺服参数,使系统达到最佳运行状态。
3. 伺服系统维护在实习期间,我还学习了伺服系统的维护方法。
包括定期检查各部件的运行状态、清洁伺服系统、更换损坏的部件等。
通过学习,我了解到维护工作对伺服系统稳定运行的重要性。
4. 伺服系统应用案例为了更好地理解伺服系统的应用,我参与了几个实际案例的实践。
例如,在自动化生产线中,伺服系统用于控制机械臂进行取料、放置等操作;在数控机床中,伺服系统用于实现高精度的加工。
四、实习体会与收获1. 理论与实践相结合通过本次实习,我深刻体会到理论与实践相结合的重要性。
在实习过程中,我将所学理论知识应用于实际操作中,提高了自己的动手能力。
2. 团队协作在实习过程中,我与同学们相互配合,共同完成各项任务。
这使我认识到团队协作在完成工作过程中的重要性。
3. 严谨的工作态度在实习过程中,我学会了如何对待工作,始终保持严谨的态度。
这对我今后的学习和工作都具有积极的意义。
4. 拓宽知识面通过实习,我对伺服系统有了更深入的了解,拓宽了自己的知识面。
安川Σ-V伺服驱动_SigmaWin调试实习
③ 速度环增益KV (Hz)和位置环增益KP (s-1) 的关系
Kp ≤ 2 πKv 4
移项后得到,
K P ≤ 2π = 1.57 KV 4
如果①②③的关系式中有任何一项未成立,则系统会发生振动。
安川运电动机控(中制国培)训有课限程公司
在2惯性模型中,电机轴会出现反共振现象。
振幅(dB)
负载轴
①
共振
共振频率
电机轴
反共振频率 反共振
频率(Hz) (对数刻度)
②
反共振:负载轴在动,但电机轴却保持不动的频率就是反共振频率。 注:这里①和②实际是重合的,为了便于理解,描画了两条线。
安川电机(中国)有限公司
21
4.2.4 实践准备
1)设置实时监测1:速度控制模式时
实习机会自动运行,请注 意安全。
调整完成后,背景将变 成白色。
检测出振动时,伺服单元 会根据相应的振动频率设 置3个对策菜单。
自动调谐本实习机时,陷 波滤波器将被设定,这时 “陷波滤波器”前的绿色 圆圈将变亮。
高级自动调谐开始窗口(上)/完成窗口(下)
安川电机(中国)有限公司
27
4.2.5 高级自动调谐
比,移动距离以mm为单位设定。这里设置 为“100”。注意不要移动至引起P-OT或NOT的范围。 ⑤选中“Start tuning using the default settings”单选框。
① ② ③
④
⑤
安川电机(中国)有限公司
26
4.2.5 高级自动调谐
自动实施以下调整 ・ 评估振动水平 ・ 动作评估,增益 ・ 设定陷波滤波器 大约需2分钟时间。
安川伺服调试说明书
YSKAWA安川∑Ⅱ数字交流伺服 安装调试说明书 (2004.7版本) 目 录 1. 安川连接示意图 2. 通电前的检查 3. 通电时的检查 4. 安川伺服驱动器的参数设定 5. 安川伺服驱动器的伺服增益调整 广州科沃—工控维修的120 www.gzkowo.com1. 安川连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在安川的保修范围!) 2. 通电前的检查 1) 确认安川伺服驱动器和电机插头的连接,相序是否正确: A.SGMGH电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D B.SGMGH电机 0.5KW-4.4KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 刹车电源 E 刹车电源 F 刹车电源为: DC90V (无极性) C. SGMGH电机5.5KW-15KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 电机制动器插头 刹车电源 A 刹车电源 B 刹车电源为: DC90V (无极性) 注: 1.相序错误,通电时会发生电机抖动现象。
2.相线与“接地”短路,会发生过载报警。
2)确认安川伺服驱动器CN2和伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认伺服驱动器CN1和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4.安川伺服驱动器的参数设定 安川伺服驱动器参数,操作方法如下:(1)参数密码设定; (2)用户参数和功能参数的设定; 1)参数密码设定 为防止任意修改参数,将“Fn010”辅助功能参数,设定: ・ “0000” 允许改写 PnXXX 的用户参数,及部分辅助功能“FnXXX”参数。
安川伺服驱动器软件使用

安川伺服连接 1 运行 sigmawin+
0.安川调试软件SigmaWin+的使用
安川伺服连接 1.1运行 sigmawin+选择伺服驱动器 sigmawin+软件开始运行时,会看到选择连接的对话框,根据实际使用的通信端口来选择 伺服驱动器和PC的连接。
是否在线连接驱动单元
0.安川调试软件SigmaWin+的使用
安川伺服连接 1.3 运行 sigmawin+,自动调谐指令传送
0.安川调试软件SigmaWin+的使用
安川伺服连接 1.3 运行 sigmawin+,自动调谐指令传送
0.安川调试软件SigmaWin+的使用
安川伺服连接 1 .3运行 sigmawin+,自动调谐运行/测量
安川伺服连接 1.1 运行 sigmawin+选择伺服驱动器 sigmawin+软件开始运行时,会看到选择连接的对话框,根据实际使用的通信端口来选择 伺服驱动器和PC的连接。
sigmawin+ 软 件打开界面
0.安川调试软件SigmaWin+的使用
安川伺服连接 1 运行 sigmawin+ 1.菜单工具
<优点> ・能够抑制机械共振。 <缺点> ・延迟要素增加而变得不稳定,控制体自身产生振动。
重要
滤波器 作为由机械共振而引起振动时的对策是◎ 作为由控制不稳定而引起振动时的对策是×
2.关于控制(4)
关于发生振动的结构
发生的振动是
重要
提高增益 → 机械共振,控制体自身不稳定的振动
加入滤波器 → 控制不稳定的振动
2.关于控制(1)
前馈控制和反馈控制
前馈的流向
目标指令
+ -
宝元LNC 安川SimgaV参数设定调机说明

LNC調整YASKAWA Σ-V Series說明 1.0版賴宜宏注意:進行安川SigmaWin+ English Edition軟體前,請先確實依照『技術文件_M-II數位通訊功能_V0.1.doc』執行相關設定,確保【M-II伺服軸】【M-II主軸】相關參數的設定,【M-II伺服軸與主軸的SERVO ON/OFF控制】可以搭配PLC使用者參數的A bit做SERVO ON/OFF控制比較方便,如下圖:調機前相關說明:1.慣量比:每台CNC機床的X軸Y軸Z軸負載都不同,因此3軸的慣量比請使用SigmaWin+ 軟體去抓取各軸慣量比,各軸驅動器參數Pn103都不一樣。
2.安川驅動器參數設定:每台CNC機床的X軸Y軸Z軸剛性與反應都不同,通常使用SigmaWin+ 軟體抓取到的驅動器參數後,會將3個軸向之中負載最大的軸向當做基礎,也就是說如果Z軸的慣量比最大負載也就最重,那麼Autotunin g只要Z軸就可以了,因此請將X軸與Y軸驅動器參數所有全部參數都設成與Z軸伺服參數相同這樣加工才不會產生問題,除了剛剛所說的Pn103不一樣之外。
3. 調機前,請將控制器參數1932設為0,採用AI C,R10等級調機,建議如下參數數值參數數值參數數值參數數值408 10 701 35 705 200000 1004 10000000 422~424 100 702 0 710~712 400000 429 2 437~439 0 703 25 730 200000 407 0 700 100 704 1200000 731~733 95一、SigmaWin+ 連線1.點選,將USB調機線連接到驅動器的CN7。
2.Connect使用Online 搭配USB 再按下Search。
注意:如果沒有安裝SigmaWin+ USB驅動程式,則無法使用USB選項3.選取ΣV打勾,搭配USB在Search,等待掃描後會出現所連接的驅動器。
安川伺服培训
参数设定
(45)
4 调整(Tuning) 4.1 什么是调整 (20) 4.2 免调整功能 (10) 4.3 实习机说明和调整作业的准备 (30) 4.4 调整实习 (30)
( )内数字为授课时间(单位:分钟) 休息时间:上午1次、下午2次,每次10分钟
运动控制培训课程
3
Questions?
运动控制培训课程 4
运动控制培训课程
基础课程的伺服驱动器
运动控制培训课程1本课程的目标通过本课程培训,使学员达到以下目标: 针对安川電機伺服驱动产品Σ -Ⅴ系列,
1) 熟悉伺服驱动的软硬件、能正确理解使用方法。 2) 能正确安装(包括参数设定)及调整伺服驱动器。 3) 能熟练使用工程软件 SigmaWin+。
运动控制培训课程
2
日程表
上午 ・培训说明 1 伺服基础 1.1 何谓伺服 1.2 伺服构造 (10) (20) (30) 下午
3 伺服系统的性能评价 3.1 伺服响应 3.2 实习准备 3.3 实机操作并观察伺服响应
(30) (20) (60)
2 参数设定及实机操作实习 2.1 参数概要及实习机
(30)
2.2~2.7
安川Sigma V产品调谐设定文档
安川Sigma V产品调谐设定文档1.说明 (1)1.1“免调谐”功能 (1)1.2“高级自动调谐”功能 (2)1.3“单参数调谐”功能 (2)2.自动调谐过程介绍 (2)2.1惯量推测过程介绍 (2)2.2高级自动调谐介绍 (6)2.2.1无上位指令高级自动调谐 (7)2.2.2有上位指令高级自动调谐 (10)2.3单参数调谐过程介绍 (13)1.说明此文档目的是介绍安川Sigma V系列伺服产品的调谐方法,安川Sigma V系列伺服产品的调谐过程较安川Sigma II系列伺服产品的调谐有了很大的改变,V 系列产品支持“免调谐”功能,“高级自动调谐”功能,“单参数调谐”功能。
除“免调谐”功能可在驱动器面板上操作外其它调谐功能操作都需要在Sigma Win+(Ver5.03以上)软件或手持式操作器上完成。
Sigma II系列伺服驱动器在驱动器操作面板上设定刚性以及推测惯量功能在Sigma V系列伺服驱动器上取消。
1.1“免调谐”功能此功能为驱动器出厂默认设置,即伺服系统安装后只需更改几个必要参数(例如:工作模式、限位设定等参数)无需调谐即可运行,在电机转子允许惯量范围内(例如:SGMJV系列允许0~10倍,SGMA V系列允许0~20倍,其它电机请参考选型样本说明。
)都能达到相同的定位时间以及效果,适用于对伺服响应以及定位精度要求不高的场合。
注:当使用13位编码器电机时,在负载惯量比为10以上的情况下电机可能产生振动,可通过Fn200设定Mode=2或者将Level减小。
1.2“高级自动调谐”功能在“免调谐”情况下无法达到快速响应精确定位时可采用“高级自动调谐”功能,驱动器将根据机械特性按照驱动器内部算法推算速度环和位置环相关增益参数,推算的结果将保存到增益参数中,“高级自动调谐”后可提高电机响应和定位精度降低电机运行时的振动。
1.3“单参数调谐”功能在“高级自动调谐”的基础上进一步进行响应时间和定位精度提高或人为设定匹配机械特性的功能,调整单个伺服增益参数其它增益参数按照一定比例关系进行调整,操作者可根据机械特性以及电机运行情况进行调谐,设定最适合此机械特性的增益参数达到要求的响应时间和定位精度并降低机械振动。
安川SigmaWin+第四步-手动调整
SIGMAWIN+ 7.27版本手动调整使用说明(本文用于sigmawin+ 7.27版本手动调整使用步骤说明)当前面3步都没达到要求的时候,则进行手动调整。
手动调整更多的是结合经验,所以需要调整者有一定调试经验,我只能介绍相关方法,经验没法介绍,需自己领悟。
调整前需将Pn140.0=0将模型追踪控制关闭,参数需符合下面的公式。
调整中由上位一直给运动指令,根据波形情况来进行手动调整。
1、伺服单元控制电源正常供电。
2、正确连接伺服控制线缆、连接伺服。
3、连接成功后如下图,并点击菜单键。
4、如下图,点击参数在线编辑。
5、操作界面如下图,点击设定以进入设定界面。
6、如下图,在设定界面中的每一行选择设定,以选择需要修改的参数。
(最多可一次在线修改5个参数)7、随后界面如下,选择需要修改的参数,然后点击OK键。
(选择Pn100、Pn101、Pn102、Pn401、Pn140,个人习惯,可以根据自己需要修改的参数进行更改设定。
)8、选择好后出现如下界面。
手动调整时,整个界面如下图9、调整参数时,需根据波形图情况进行参数调整,所以需将波形追踪同时开启。
点击点击选择定位完成需要跟踪的指令采样时间设定击下面的开始现在看到的波形不是完整的,点击“停止”,然后点击下面的3个AUTO,至如下图+放大镜,查看需要放大的部分。
“减”恢复放大效果,放大效果下不能点击AUTO游标,测振动频率、定位时间、响应时间等选择放大部分点击游标,测得响应时间以上时对响应时间作调整,参数如何调整,这个说不清楚的,不做赘述。
请看文章首部介绍。
10、下面调整定位时间。
如图响应时间0.37ms如何调整,也不做赘述,请查看文章首页,以及Σ-7系列脉冲型或总线型资料第八章“调整”利用游标,测得定位完成时间11、陷波滤波器、A型抑振、振动抑制如何使用。
振动抑制0~100HZA型抑振100~500HZ陷波滤波器500~2000HZ如图,使用陷波滤波器Pn408选择1段陷波开启,设置Pn409=777HZ,设置777HZ陷波。
安川SigmaWin+第三步-自定义调整

SIGMAWIN+ 7.27版本自定义调整使用说明 (本文用于sigmawin+ 7.27版本自定义调整使用步骤说明)
1、伺服单元控制电源正常供电。
2、正确连接伺服控制线缆、连接伺服。
3、连接成功后如下图,并点击菜单键。
4、如下图,点击调谐,进入操作界面。
5、如图,确认如下警告之后,点击执行。
6、点击需要进一步调整时,然后警告选择OK
7、选择自定义调整。
8、进入如下界面,选择需要设定的模式和机构,然后点击下一步。
点击确认
惯量比之前已经调整,
直接点击下一步9、选择模式0、1出现如下界面,只需调整一个值就可以了。
点击调整开始---然后调整L0040增加。
达到目标值,点击调整完成。
10、选择模式2、3出现如下界面,需调整FF前馈和FB反馈。
点击调整开始---一直增加FF前馈值。
(①达到要求,点击调整完成。
②在增加FF前馈值时,伺服出现振动或者异响,请增加FB反馈值,伺服稳定后,再增加FF前馈值,反复如此,直至达到要求后点击调整完成。
)。
安川伺服参数设定说明
Pn212
马达一转
输出的脉冲数
1250
(2048)
850W及以上电机(与系统参数61-63致)
Pn20E
电子齿轮比(分子)
262144
(1)
850W及以上电机(09系列)
(750W电机)(08系列)
Pn210
电子齿轮比(分母)
Pn00b
电源设定
默认三相
0001
0001→三相电源0101→单相电源
Pn100
速度环增益
40
0100
(根据机台实际设定)
Pn101
速度环积分时间
2000
003.0
(根据机台实际设定)
Pn102
位置环增益
40
0060
(根据机台实际设定)
Pn200
脉冲指令输入信号型态
0000
0004
0001-----CW+CCW,正逻辑
欢迎您的下载,资料仅供参考!
自动调谐刚性设定
4
0003
设低增益等级做自动调整抓惯量
备注:刹车设定Pn50E设0000
Pn50F使用CN1-25/CN1-26输出/BK信号设0100
使用CN1-27/CN1-28输出/BK信号设0200
使用CN1-29/CN1-30输出/BK信号设0300
Welcome To
Download !!!
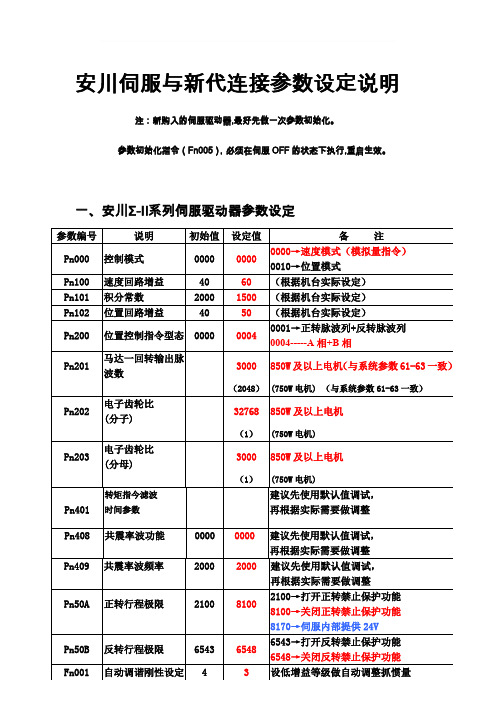
安川伺服与新代连接参数设定说明
注:新购入的伺服驱动器,最好先做一次参数初始化。
参数初始化指令(Fn005),必须在伺服OFF的状态下执行,重启生效。
一、安川Σ-Ⅱ系列伺服驱动器参数设定
二、安川Σ-V系列伺服驱动器参数设定
安川伺服参数设定参数_中文1

2 参数设定及实机操作练习我们将操作Σ-Ⅴ实习机和工程软件SigmaWin+,学习设定各种参数,掌握伺服驱动器的操作方法。
2.0如何下载 SigmaWin+2.1参数概要及实习机说明2.2伺服系统结构图2.3速度控制相关参数2.4转矩控制相关参数2.5位置控制相关参数2.6输入输出信号相关参数2.7其他参数及辅助功能・ SigmaWin+(电脑软件)・・下载和安装注册成为会员后,点击网页上的“支持工具” → “伺服支持工具一览” →SigmaWin+,根据画面提示下载并安装。
2.0 如何安装SigmaWin+2.1 参数概要及实习机说明辅助功能Fn □□□参数Pn □□□监测功能Un □□□按功能不同,参数可分为安装参数和调整参数两类。
(详见用户手册11-11至11-32的列表说明。
)□□□为3位16进制数(简称Hex ),代表参数编号。
辅助功能用于执行伺服安装或伺服调整相关功能。
(详见用户手册11-10的列表说明。
)检测功能用于显示伺服状态及输入输出状态。
(详见用户手册11-33的列表说明。
)注1) 16进制数用数字0到9和字母A 到F 表示。
注2) SigmaWin+ 不会显示辅助功能和监测功能的参数内容。
注1)2.1.1 参数及相关功能2.1.2 参数类型⏹参数分以下两类。
⏹功能选择类型* 由4位16进制数(Hex)构成。
* 按设定值选择不同的功能。
下面将以Pn000为例说明。
⏹数值设置类型* 直接设定数值。
⏹可利用工程软件SigmaWin+、数字操作器或面板操作器(位于伺服单元正面小盖板下)等工具设置参数。
数字操作器面板操作器安装了SigmaWin+的电脑图2.1.2 参数设定工具2.1.2 参数类型参数Pn000的名称是“功能选择基本开关0”。
第3位第2位第1位第0位Pn000:n.□□□□ 控制方式选择 0:速度控制(模拟信号,出厂值) 1:位置控制(脉冲指令) 2:转矩控制(模拟信号) (下略)更改功能选择类型参数的设定值后,需重启电源,将新的设定值写入伺服单元,参数才会生效。
伺服驱动器实习报告
实习报告:伺服驱动器实习体验一、实习背景随着科技的不断发展,伺服驱动器在工业生产、机器人、自动化等领域发挥着越来越重要的作用。
为了更好地了解伺服驱动器的原理和应用,提高自己的实践能力,我参加了为期一个月的伺服驱动器实习。
二、实习内容实习期间,我主要进行了伺服驱动器的安装、调试、编程和维护等工作。
实习过程中,我深入了解了伺服驱动器的结构、原理、性能和应用,掌握了伺服驱动器的基本操作和故障排除方法。
1. 安装与调试在实习的第一周,我学习了伺服驱动器的安装与调试。
在导师的指导下,我学会了如何正确安装伺服驱动器和电机,如何进行接线和参数设置。
在调试过程中,我了解了伺服驱动器的启动、停止、速度控制、位置控制等功能,并学会了如何通过调整参数来优化系统性能。
2. 编程与应用在实习的第二周,我学习了伺服驱动器的编程与应用。
在导师的帮助下,我掌握了伺服驱动器的基本编程方法,学会了如何实现速度控制、位置控制和力控制等功能。
同时,我还了解了伺服驱动器在机器人、自动化生产线等领域的应用,加深了对伺服驱动器的认识。
3. 故障排除与维护在实习的第三周,我学习了伺服驱动器的故障排除与维护。
通过实际操作,我掌握了伺服驱动器常见故障的诊断方法,学会了如何排除故障并恢复正常运行。
同时,我还了解了伺服驱动器的日常维护方法,提高了伺服驱动器的使用寿命。
4. 综合实践在实习的第四周,我进行了综合实践。
在导师的指导下,我设计了一个简单的自动化控制系统,利用伺服驱动器实现了对一个机械臂的运动控制。
通过这个项目,我将所学知识运用到实际中,提高了自己的实践能力。
三、实习收获通过这次伺服驱动器实习,我收获颇丰。
首先,我深入了解了伺服驱动器的原理和应用,为以后从事相关工作打下了基础。
其次,我学会了伺服驱动器的安装、调试、编程和维护等技能,提高了自己的实践能力。
最后,我认识到了团队协作的重要性,学会了与他人共同解决问题。
四、实习总结这次伺服驱动器实习让我对伺服驱动器有了更深刻的认识,提高了自己的实际操作能力。
sigmawin+操作说明
目录1. 运行sigmawin+ (1)1.1. 连接 (1)1.2. 工具栏 (4)1.3. 参数设定 (5)1.4. 参数转换 (6)1.5. 报警显示 (10)1.6. 监视 (11)1.7. 配线检测 (15)2. 试运行 (16)2.1. 点动 (16)2.2. 程序点动 (19)3. 追踪功能 (21)3.1. 数据追踪 (21)3.2. 追踪设置 (22)3.3. 追踪运行 (23)3.4. 追踪主窗口 (26)4. 调谐 (33)4.1. 调谐结构 (34)4.2. 调谐主窗口 (34)4.3. 自动调谐 (36)4.4. 转动惯量比的测定 (36)4.5. 有指令输入的自动调谐 (42)4.6. 无指令输入的自动调谐 (45)4.7. 单参数调谐 (48)4.8. 振动的抑制 (54)1运行sigmawin+1.1选择伺服驱动器sigmawin+软件开始运行时,会看到选择连接的对话框,根据实际使用的通信端口来选择伺服驱动器和PC的连接。
选择连接伺服驱动器的方式:在线或离线状态,在线状态是默认设置在线方式:当要对伺服驱动器进行调谐和设置时需要使用在线方式离线方式:当要对参数进行调整以及检查屏幕显示和机械分析时使用离线方式当采用离线方式时当选择在现方式时点击search按钮,搜索当先连接的端口,注:Σ-Ⅴ为USB端口Σ-Ⅴ的USB连接方式点击search按钮,当驱动器和PC成功连接后会出现如下对话框点击出现的相应型号的伺服驱动器然后按connect按钮或者直接双击伺服驱动器来进行连接,sigmawin+软件的主窗口就会出现,点击cancel关闭当前对话框。
Sigmawin+连接Σ-Ⅴ后出现主窗口所有的应用功能都可以通过菜单栏或工具栏上面使用1.2工具栏直接点击工具栏上的图标就可以使用相应的功能Sigmawin+Σ-Ⅴ组件工具栏工具栏按钮功能名称工具栏按钮功能名称参数设定模拟量监视输出调整参数在线设定电机电流检测偏移量调整快速设置原点检索参数转换写保护报警显示响应等级设定产品信息初始化振动检测等级系统监视简易FFT状态监视结构选项卡错误复位运动监视软件重启输入信号监视电机参数刻度写入输出信号监视极性检测配线检查起始位置设定在线振动监视追踪伺服轴名设定实时追踪绝对值编码器重启调谐多转极限设定点动速度扭矩指令偏移量调整程序点动机械分析1.3 参数设定伺服驱动器的参数可以在离线模式和在线模式下进行设置,但是这两种状态下的参数设置画面是不同的。
安川伺服 Σ-Ⅴ自调谐
∑-V自动调谐的注意事项<概要>本文介绍的是∑-V自动调谐的注意事项和SigmaWin功能的应用示例。
本文将围绕下面3个项目进行详细阐述。
今后我们将继续探讨并实施SigmaWin的功能以及说明书中的明确记载。
①欲通过内部指令型高级自动调谐变更指令形态(移动速度等)时的处理方法⇒替代SigmaWin的“程序JOG运行”。
②高级自动调谐(AAT)不能正常完成或不能抑制振动时的处理方法⇒与高分辨率的编码器无关,定位完成宽度太小时,设定适宜的定位完成宽度(Pn522)。
或暂时增大到Pn522,待AAT适用后,再将Pn522恢复为原设定,然后通过单参数调谐进行微调。
⇒不能检测出或不能抑制振动时,通过机械分析、运行时的跟踪来判断频率,然后手动设定陷波滤波器、A 型减振、振动抑制。
③对不稳定的阶梯状指令响应跟踪过头时的处理方法(Σ-V 有时会发生AAT 时增益上升过高,对不稳定的指令跟踪过头而产生振动和噪音的情况。
)⇒手动设定指令类滤波器(移动平均滤波器等)。
欲通过内部指令型高级自动调谐变更指令形态(移动速度等)时的处理方法下面介绍一下程序JOG运行时高级自动调谐的步骤。
图1 高级自动调谐的条件设定对话框程序JOG运行(SGDV、SigmaWin+)时高级自动调谐的步骤下面介绍一下程序JOG运行时高级自动调谐(AAT)的方法。
程序JOG运行的指令作为模拟的外部指令,实施外部指令输入型AAT。
程序JOG运行无需连接上游装置即可任意控制伺服电机的功能。
可设定移动距离、移动速度、加减速时间、运行次数等,还可简单地变更运行条件。
详细内容请参考用户手册。
下面介绍操作步骤。
①从SigmaWin菜单中选择[测试运行]⇒ [程序JOG运行]。
(图2)②在程序JOG运行的设定对话框内设定移动距离、移动速度、加减速时间、运行次数等。
(图2)③执行程序JOG运行,使伺服连续运行。
(图2)④从SigmaWin菜单中选择[自动调谐]。
安川Σ-V伺服驱动_SigmaWin调试实习
①因为事先已推算过转动惯量比,所以这里选 择“1:A moment of inertia is not presumed”。
②模式选择设为“2:Positioning”。 ③机构选择设为“2:Ball screw mechanism
or linear motor” 。 ④由于设定了指令单位0.001(mm)的电子齿轮
安川电机(中国)有限公司
1
4.1 什么是调整
调整(调谐)是优化伺服单元响应性的功能。响应性取决于伺 服单元中设定的伺服增益。
一般情况下,刚性高的机械可通过提高伺服增益来提高响应性。 但对于刚性低的机械,当提高伺服增益时,可能引起振动,从 而无法提高响应性。
伺服增益通过多个参数的组合进行设定,彼此之间相互影响。 本章我们将实践练习如何设定各参数,并保持设定值之间的平 衡。
※滚珠丝杠移动轴的例子
整定时间: 241.33ms
整定时间:241.33ms
Pn100 Kv Pn101 Ti Pn102 Kp Pn401 Tf
: 40.0Hz : 20.00ms : 40.0/s : 1.00ms
安川电机(中国)有限公司
24
4.2.5 高级自动调谐
高级自动调谐是伺服单元根据内部指令自动运 行时,对以下机械特性自动进行调整的功能。
⑤再次点击菜单项 “Tuning”。
⑥ 单击窗口②的 “Execute”按钮,将 显示测算惯性转矩的 窗口。
④单击“OK”,并 重启电源。
11
4.2.2推算转动惯量
2)设定惯性转矩比的步骤1 执行测算惯性转矩的功能,系统可快速计算出作用在电机轴的负载惯性转矩。
①单击“Execute” 。
②显示条件设定窗口(本次 练习不修改窗口中数值), 单击“Next” 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
16
4.2.2推算转动惯量
2)设定惯性转矩比的步骤6
保存结果窗口
完成保存结果窗口
①单击“Writing Results”。
②单击“Finish”。
安川电机(中国)有限公司
17
4.2.2推算转动惯量
2)设定惯性转矩比的步骤7
单击“OK” 。
完成设定惯性转矩比窗口
显示软件重置窗口,单击 “Execute”。
如右图所示设定各条件。
①因为事先已推算过转动惯量比,所以这里选 择“1:A moment of inertia is not presumed”。
②模式选择设为“2:Positioning”。 ③机构选择设为“2:Ball screw mechanism
or linear motor” 。 ④由于设定了指令单位0.001(mm)的电子齿轮
4 伺服系统调整实践
本章将学习伺服驱动系统Σ‐Ⅴ的免调整功能、高级自动 调谐功能和单参数调谐。
4.1 什么是调整 4.2 调整练习 4.2.1 调试实习的准备 4.2.2 推算惯性转矩 4.2.3 机械分析 4.2.4 追踪设定 4.2.5 高级自动调谐 4.2.6 指令输入型高级自动调谐 4.2.7 单参数调谐 4.3 伺服的响应性确定实习 4.3.1 环增益的特性 4.3.2 各增益的关系
⑤再次点击菜单项 “Tuning”。
⑥ 单击窗口②的 “Execute”按钮,将 显示测算惯性转矩的 窗口。
④单击“OK”,并 重启电源。
11
4.2.2推算转动惯量
2)设定惯性转矩比的步骤1 执行测算惯性转矩的功能,系统可快速计算出作用在电机轴的负载惯性转矩。
①单击“Execute” 。
②显示条件设定窗口(本次 练习不修改窗口中数值), 单击“Next” 。
安川电机(中国)有限公司
2
4.1.1 增益相关参数
Pn1Байду номын сангаас2:位置环增益
Pn101:速度环积分时间常数
位置环
速度环
Ti
+
Kp
-
+
+ Kv, J +
-
电流环
Tf, Nt
电流
+
控制部
-
电流反馈
速度反馈
位置反馈
机床
电机 编码器
Pn100:速度环增益 Pn103:惯性转矩比
Pn401:转矩指令滤波器时间常数 Pn409:陷波指令滤波器频率
实习机会自动运行,请注 意安全。
调整完成后,背景将变 成白色。
检测出振动时,伺服单元 会根据相应的振动频率设 置3个对策菜单。
自动调谐本实习机时,陷 波滤波器将被设定,这时 “陷波滤波器”前的绿色 圆圈将变亮。
高级自动调谐开始窗口(上)/完成窗口(下)
安川电机(中国)有限公司
27
4.2.5 高级自动调谐
注)转矩指令滤波器是设置在转矩指令中的滤波器,用于抑制伺服单元造成的振动。
③ 速度环增益KV (Hz)和位置环增益KP (s-1) 的关系
Kp ≤ 2 πKv 4
移项后得到,
K P ≤ 2π = 1.57 KV 4
如果①②③的关系式中有任何一项未成立,则系统会发生振动。
安川运电动机控(中制国培)训有课限程公司
免调整
AAT
指令输入 AAT
○
×
×
×
○
×
×
○
○
○
○
○
○
○
○
×
○
○
×
○
○
×
○
○
×
○
○
安川电机(中国)有限公司
单参数 调谐
× × ○ ○ ○ ○ ○ ○ ○
5
4.1.4 模型追踪控制和摩擦补偿
模型追踪控制:在位置控制模式下,通过调整前馈,缩短整 定时间。
模型追踪控制 (前馈)
控制结构图(示意)
位置指令
安川电机(中国)有限公司
10
4.2.1 实践准备
1)将免调整功能设置为无效的操作步骤
首先,从调整菜单设定免调整功能为无效,并重启电源。 画面显示从调整窗口切换至测算惯性转矩窗口。
①单击“Tuning”。
③将免调整功能 设置为无效,然 后单击“OK”。
②单击“Execute” 。
安川电机(中国)有限公司
推算完成窗口
共振频率
与免調整及AAT自动设定的陷波滤波器频率 大致相同。可以在这个窗口设置陷波滤波器 ,将设置至第1段(Pn409)。
运动控制培训课程
20
4.2.3 机械分析
2.惯性负载引起的共振和反共振
电机(转子的惯量)和负载(的惯量)通 过弹簧连接的机构称为2惯性模型。
电机(转子的惯量)和负载(的惯量)直 连的机构称为刚性模型。
安川电机(中国)有限公司
12
4.2.2推算转动惯量
2)设定惯性转矩比的步骤2
③显示指令传输窗口, 单击“Start” 。
④传输完成后,单击 “Next”。
安川电机(中国)有限公司
13
4.2.2推算转动惯量
2)设定惯性转矩比的步骤3
运转 / 测试窗口
单击“Servo On”。
安川电机(中国)有限公司
⑩选中“Single”。 ⑪单击“Start”。
⑧如下设定触发器: 触发器条件:Trigger A 触发器对象:TGON 触发器类型:Falling edge
运动安控川制电培机训(中课国程)有限公司
⑦设定预触发 器为“10”%。
⑨单击“OK”。
22
4.2.4 实践准备
2)设置实时监测2:位置控制模式时
实时监测窗口
①点击菜单“Trace” → “Trace”
设置窗口
②单击“Setup”。
③从下拉列表选中“Speed referenece”,然后单击 “Apply”。
④设定采样时间为“1000” (可采样1000μs x 1000 = 1 s 的数据。)
⑤确认选中了 “/TGON”。
⑥使用默认设置。也可根 据需要修改。
单参数调谐
在运转机床并追踪数据的同时,手动调整2个 参数,从而获得最稳定的响应性。 整定时间:0 - 4ms。
安川电机(中国)有限公司
4
4.1.3 伺服调整功能的调整对象
免调整 惯性转矩比 位置、速度增益 转矩指令滤波器 自动陷波滤波器
*)
A型抑振控制*) 摩擦补偿 模型追踪控制 振动控制*)
*)检测出振动时使用
实时监测窗口
①点击菜单“Trace” → “Trace”
设置窗口
②单击“Setup”。
③从下拉列表选中“Positioning ④设定采样时间为“1000” completed”,然后单击“Apply”。 (可采样1000μs x 1000 = 1 s
的数据。)
⑤确认选中了 “/COIN”。
⑥使用默认设置。也可根 据需要修改。
位置、速度控制 (反馈)
电机
工作台
摩擦补偿功能
摩擦补偿功能:由于机床运动部存在不断变化的摩擦,从而 影响系统的响应。通过补偿这部分可变摩擦带来的影响,使 系统获得安定的响应性。吸收机床的差异,达到稳定的定位 时间。
安川电机(中国)有限公司
6
4.1.5 振动对策
自动检测振动频率,自动应用振动对策功能,快速便捷地达 到抑振效果。
在2惯性模型中,电机轴会出现反共振现象。
振幅(dB)
负载轴
①
共振
共振频率
电机轴
反共振频率 反共振
频率(Hz) (对数刻度)
②
反共振:负载轴在动,但电机轴却保持不动的频率就是反共振频率。 注:这里①和②实际是重合的,为了便于理解,描画了两条线。
安川电机(中国)有限公司
21
4.2.4 实践准备
1)设置实时监测1:速度控制模式时
・推算转动惯量 ・增益(位置环增益、速度环增益) ・滤波器(转矩指令滤波器、陷波滤波器) ・摩擦补偿 ・A型抑振控制 ・抑振
单击 “Autotuning”
选中“No reference input”
高级自动调谐的开始窗口
安川电机(中国)有限公司
25
4.2.5 高级自动调谐
(1)模式选择设定为“2:Positioning”
14
4.2.2推算转动惯量
2)设定惯性转矩比的步骤4
单击“Forward”。
单击“Reverse”。
安川电机(中国)有限公司
15
4.2.2推算转动惯量
2)设定惯性转矩比的步骤5
测试完成窗口
①完成测算后,单击 “Next”。
②显示伺服OFF的提 示信息窗口,单击 “OK”。
安川电机(中国)有限公司
将免调整功能选择参数Pn170.0从“1”(有效)变更为“0”(无效),然后重新接通电源。 2) 设定惯性转矩比。
要达到Pn100(速度环增益)中设定的响应能力,就必须能输出与要求增益相应的加速度,即 能输出与要求加速度相应的转矩。 进一步,由于转矩 = 惯性转矩×角加速度,要输出符合要求的转矩,就必须设定正确的负载 惯性转矩。 可以利用SigmaWin+提供的功能菜单“测算惯性转矩比(负载惯性转矩比 / 电机转子的惯性转 矩)(%)”,将测算所得数值设定至惯性转矩比Pn103(出厂值为100%)。 3) 设置实时监测条件。 可以利用SigmaWin+提供的功能菜单“Trace”,绘制伺服应答图。 在绘图前,需要先设置下列条件: ①采样时间 ②追踪数据(最大可设置3个) ③触发器 ④预触发器
※滚珠丝杠移动轴的例子
整定时间:9.25ms ・与应用出厂值时相比,高 级自动调谐后的整定时间大 幅短缩。