安川伺服手册SGDM
安川伺服使用手册
安川伺服使用手册珊华电子科技(上海)有限公司 2011年3月目 录第一章 安川伺服简介1.1产品的确认1.2产品的型号第二章 安川伺服接插件2.1 S-II系列(3kw、15kw)2.2 S-V系列 (400w、750w)第三章 安川伺服调试3.1 主要的参数3.2 两主轴同步性第四章 安川伺服常见报警处理4.1 常见的报警4.2 处理方法第五章 安川伺服的安装5.1 伺服电机安装事项5.2 伺服驱动器安装事项第一章 安川伺服简介1.1 产品的确认1.1.1 产品的确认事项产品到货后,请就以下项目进行确认。
在以上各项的确认中, 如发现有不妥之处, 请及时与所购地的销售店或本公司的销售处联系。
1.1.2 伺服电机的铭牌确认项目备注到货产品是否与您订购的产品型号相符? 请通过伺服电机、SERVOPACK( 伺服单元) 的铭牌的“型号”栏进行确认( 请参照下一项以后的说明)。
伺服电机的旋转轴是否运行顺利? 能用手轻轻转动则属正常。
但是“带制动器的电机”则不转动。
是否有损坏的地方? 请查看整个外表,检查是否有因运输等引起的损伤。
其中生产编号中的第三、四位是年份,第五位是月份。
例如:DD 996 456789001299年 6月(其它英文字母代表:X-10月份、Y-11月份、Z-12月份)1.2 产品的型号1.2.1 S-II系列伺服电机:伺服驱动器:1.2.2 S-V系列伺服电机:伺服驱动器:第二章 安川伺服接插件2.1 S-II系列(3kw、15kw)3KW伺服电机型号:SGMGH-30ACA61电机侧编码器接插件:L形插头 MS3108B20-29S电缆夹 MS3057-12A电机侧动力接插件:L形插头 MS3108B22-22S电缆夹 MS3057-12A驱动器型号:SGDM-30ADA驱动器侧(CN2)编码器接插件:55100-0670**驱动器侧(CN1)50芯I/O接插件:连接器 10150-3000PE**壳体 10350-52A0-008**15KW伺服电机型号:SGMGH-1EACA61电机侧编码器接插件:L形插头 MS3108B20-29S电缆夹 MS3057-12A电机侧动力接插件:L形插头 MS3108B32-17S电缆夹 MS3057-20A驱动器型号:SGDM-1EADA驱动器侧(CN2)编码器接插件:55100-0670**驱动器侧(CN1)50芯I/O接插件:连接器 10150-3000PE**壳体 10350-52A0-008**2.2 S-V系列 (400w、750w)400W 伺服电机型号:SGMJV-04AAA61电机侧编码器接插件:插头54346-0070****插针56161-8081****电机侧动力接插件:J27-06FMH-7KL-1M-CF**(套件:包含插头、插针) 插头插针驱动器型号:SGDV-2R8A01A驱动器侧(CN2)编码器接插件:55100-0670**驱动器侧(CN1)50芯I/O接插件:连接器 10150-3000PE**壳体 10350-52A0-008**750W 伺服电机型号:SGMJV-08AAA61电机侧编码器接插件:插头54346-0070****插针56161-8081****电机侧动力接插件:J37-06FMH-7KL-1M-CF**(套件:包含插头、插针) 插头插针驱动器型号:SGDV-5R5A01A驱动器侧(CN2)编码器接插件:55100-0670**驱动器侧(CN1)50芯I/O接插件:连接器 10150-3000PE**壳体 10350-52A0-008**第三章 安川伺服调试3.1 主要的参数1)PN000 控制模式选择最主要是第1位(速度、位置控制方式的选择)2)PN100 速度环增益在速度控制,增加设定值可以提高响应性3)PN101 速度环积分时间参数降低设定值可以提高响应性4)PN102 位置环增益在位置控制,增加设定值可以提高响应性5)PN103 转动惯量比最好能设定为与机械惯量实际越接近越好6)PN110 在线自动调谐类开关如果负载基本不变的话,需要把第0位,改成2-不调谐。
安川电机驱动器SGM系列使用手册
贰硬件接线叁操作器说明肆使用者参数伍监控软件陆故障排除柒容量计算捌应用范例玖厂牌比较拾专有名词代表了伺服马达和驱动器技术的尖端高功能高质量小体积是成功之关键 在产品中有四种马达和一种驱动器其规格从30w到7.5kw 马达简介1)SGMAH伺服马达利于高加速度的高转矩-惯性比用于轻工业(IP55)额定速度3000rpm最高速度5000rpm主要用途电子装配高速定寸裁切成型机PCB钻孔2)SGMPH伺服马达适用于恶劣的工作环境(IP67)长度最短的伺服马达额定速度3000rpm最高速度5000rpm主要用途半导体应用食品包装机器人3)SGMGH伺服马达一般用途的伺服马达大容量(0.5KW到7.5KW)适用于恶劣的工作环境(IP67)主要用途CNC工作母机半导体应用传送线包装转换机额定速度1500rpm最高速度3000rpm4)SGMSH伺服马达利于高加速度的高转矩-惯性比适用于恶劣的工作环境(IP67)额定速度3000rpm最高速度5000rpm主要用途制袋机成型机PCB钻孔高速工作母机马达型号说明SGDM驱动器400W或低于400W的100V或200V单相型800W和1500W的驱动器经改装后可使用单相200V电源500W或高于500W的200V 3相驱动器型号说明驱动器简介贰硬件接线参操作器说明数字操作器共分掌上型数字操作器及内建数字操作器掌上型数字操作器内建数字操作器按MODE/SET键可选择状况显示辅助功能参数设定监视模式等四种模式状况显示是通电后的系统设立显示状况显示表示了驱动器的状况(停止运行和超行)如果警报发生显示器会自动显示警报代号辅助功能使用者参数功能Fn000 警报履历显示Fn001 在ON-LINE自动调测期间之刚性设定Fn002 JOG操作模式Fn003 原点寻找模式Fn004 备用参数Fn005 使用者参数初期化Fn006 警报履历清除Fn007 将自ON-LINE自动调谐的惯性比例资料写入EEPROM内存Fn008 绝对编码器多次转动重设及编码器警报重设Fn009 模拟速度转矩指令偏移自动调整Fn00A 速度指令补偿手动调整Fn00B 转矩指令补偿手动调整Fn00C 模拟监视器输出的手动零调整Fn00D 模拟监视器输出的手动增益调整Fn00E 马达电流侦测讯号的自动补偿调整Fn00F 马达电流侦测讯号的手动补偿调整Fn010 密码设定保护使用者参数不会被更改Fn011 马达型式显示Fn012 软件版本显示Fn000警报追踪显示显示驱动器内最后的10个警报的状况Fn001自动调谐的刚性设立决定自动调谐的机器的刚性Fn002寸动方式操作在没有外部指令的情况下操作伺服马达Fn003寻找原点方式寻找编码器原始脉冲脉位置用于校正马达与机器Fn005参数设定的最初化把所有的参数设定为系统出厂值Fn006警报追踪数据消除消除警报追踪数据显示在Fn000的数据Fn007从自动调谐中得到的惯力比率把测量到的的惯力比率写入记忆Fn008绝对值译码器的多转数和警报的重新设定重新设定绝对值译码器的警报以及把多转计数器设为0*使用绝对值译码器设定绝对值译码器的多转界限把多转极限的设定写入Pn205(否则会引起警报)Fn009模拟速度转矩指令的自动偏差调整自动设定零速度和零转矩的偏压值(用于消除偏移量)Fn00A模拟速度指令的手动偏差调整调整零速度的偏压值(用于消除偏移量)Fn00B模拟转矩指令的手动偏差调整调整零转矩的偏压值(用于消除偏移量)Fn00C模拟监视器输出的手动零调整调整模拟输出的水准Fn00D模拟监视器输出的手动固定制动器调整调整模拟输出的定比例Fn00E马达电流检查信号的自动偏差调整调整电流互感器(电流反馈)Fn00F马达电流检查信号的手动偏差调整调整电流互感器(电流反馈)Fn010密码设立更换0读写与1只读表示Fn011马达型号表示显示驱动器可运作的马达Fn012软体版本表示用户监视器持续追踪用户监视器由字母Un起头如Un001速度转矩和状况的数值用户监视器数据有两种类型数字监视器是用于监视数值的例如速度转矩和位置异常等Bit状况监视器是用于判断每一个点的开关状况使用者参数显示内容单位R/min Un000马达实际转速R/min Un001输入速度指令Un002内部转矩指令﹪Pulse Un003旋转角1Deg Un004旋转角2--- Un005输入讯号监视--- Un006输出讯号监视Un007R/min输入指令脉冲速度Un008偏差计数器值Reference unitsUn009累积负载率﹪Un00A回生负载率﹪Un00BDB电阻的电力消耗﹪Un00C---输入指令脉冲计数器--- Un00D回馈脉冲计数器Un000实际马达速度Un001输入速度指令只用于速度控制方式Un002内部转矩指令(额定转矩的﹪) 伺服马实际上输出的转矩Un003从原点起的脉冲数Un004从原点起的电气角度Un005输入信号监视器Un006输出信号监视器Un007输入指令脉冲速度脉冲输入所指令的速度(与脉冲频率成比例)Un008误差计数器值(指令单位)指令脉冲命令和实际马达位置间的误差Un009累积负荷速度(额定转矩的﹪)在10次循环中的有效转矩Un00A再生负荷速度(最高再生电力的﹪)再生电阻所消耗的平均电力Un00B由DB电阻器所消费的电力(最高电力的﹪) 动能制动电阻器所消费的平均电力Un00C输入指令脉冲计数器驱动器接受到的指令脉冲数用于位置控制方式Un00D反馈脉冲计数器驱动器接受到的反馈脉冲数肆使用者参数参数是用数字式储存操作驱动器的数据的地方参数有时被称作设定或常数参数由字母Pn起头如Pn001参数有两种类型1. 选择式参数2. 调整式参数选择式参数仿真数字式开关手册里是以Pn000.0表示位0Pn000.1表示位1Pn000.2表示位2Pn000.3表示位3每一个参数里有四个位每一个位可用十六位进制数值中的0到F来设立每一个位在参数里各有用途调整式参数仿真数字数值输入任何一个在允许范围内的整数都可设定每一个参数的范围可在用户手册里找到主要用途增值设定编码器分周比设定和寸动(JOG)速度设定等编号Pn000 功能选择基本开关注1 --- --- 0000 Pn001 功能选择基本开关注1 --- --- 0000 Pn002 功能选择基本开关注1 --- --- 0000 功能选择 参数Pn003 功能选择基本开关注1 --- ---0002 Pn100 速度回路增益 Hz 1 to 2000 40 Pn101 速度回路积分时间参数 0.01ms15 to 51200 2000Pn102 位置速度回路增益 1/s 1 to 2000 40Pn103 惯性比率 ﹪0 to 10000 0Pn104 第二速度回路增益Hz1 to 2000 40Pn105 第二速度回路积分时间参数 0.01ms 15 to 512002000Pn106 第二位置速度回路增益 1/s 1 to 2000 40 Pn107 偏压 R/min0 to 450 0Pn108 偏压 Reference Units 0 to 250 7Pn109 前馈﹪ 0 to 100 0 Pn10A前馈滤波器时间参数 0.01ms0 to 6400 0Pn10B 与增益有关的应用开关 ---- ---- 0000 Pn10C 模式开关转矩指令 ﹪ 0 to 800 200 Pn10D模式开关速度指令R/min0 to 10000Pn10E 模式开关加速度 10r/min/s 0 to 3000 0 Pn10F 模式开关偏差脉冲Reference Units0 to 10000Pn110 ON-LINE 自动调谐开关 ---- ---- 0010 与增益有关的参数Pn111 速度回馈补偿注21 to 100 100注1.改变使用者参数后应将主电源及控制电源转至OFF 后再ON 才生效注2.使用者参数Pn111仅在使用者参数Pn110.1设定至0时才有效编号值Pn112 ﹪ 0 to 1000 100 Pn113---- 0 to 10000 1000Pn114 ---- 0 to 400 200 Pn115 ---- 0 to 1000 32 Pn116 ---- 0 to 1000 16 Pn117 ﹪ 20 to 100 100 与增益有关的参数 Pn118备用参数不可改变﹪20 to 100100Pn200 位置控制指令选择开关注1 --------- 0000 Pn201 PG 分周比注1P/R16 to 16384 16384 Pn202 电子齿轮比分子注1 ---- 1 to 65535 4 Pn203 电子齿轮比分母注1 ----0 to 65535 1Pn204 位置指令加速/减速参数 0.01ms 0 to 6400 0与位置有关 的参数 Pn205多次转动极限设定注1rev 0 to 65535 65535 Pn300 速度指令输入增益0.01 v/read speed150 to 3000 600Pn301 内部速度1 R/min 0 to 10000 100 Pn302 内部速度2 R/min 0 to 10000 200 Pn303 内部速度3 R/min 0 to 10000 300 Pn304 寸动JOG 速度R/min 0 to 10000 500 Pn305 软起动加速时间 ms 0 to 10000 0 Pn306 软起动减速时间 ms0 to 10000 0Pn307 速度指令滤波器时间参数 0.01ms 0 to 65535 40 与速度有关的参数Pn308速度前馈滤波器时间参数 0.01ms 0 to 65535 0 Pn400 转矩指令输入增益0.01v/ read torque10 to 100 30Pn401 转矩指令滤波器时间参数 0.01ms 0 to 65535 100 Pn402 正转转矩极限 ﹪ 0 to 800 800 Pn403 反转转矩极限 ﹪ 0 to 800 800 Pn404 正转外部转矩极限 ﹪ 0 to 800 100 Pn405 正转外部转矩极限 ﹪ 0 to 800 100 Pn406 紧急停止转矩﹪0 to 800800与转矩有关的参数Pn407在转矩控制期间的速度极限R/min 0 to 10000 10000编号Pn500 定位完成宽度 Reference Units 0 to 250 7Pn501 零锁定准位 R/min 0 to 10000 10 Pn502 旋转侦测准位 R/min 1 to 10000 20 Pn503速度一致讯号检出宽度R/min0 to 10010 Pn504 NEAR 讯号宽度 Reference Units 1 to 250 7Pn505溢位准位256 Reference Units1 to 32767 1024Pn506 煞车指令-伺服OFF 延迟时间10ms 0 to 50 0Pn507 煞车指令输出速度准位R/min0 to 10000 100 Pn508 煞车指令-伺服OFF 等待时间 10ms 10 to 10050Pn509 暂时保持时间 ms 20 to 1000 20Pn50A 输入讯号选择1注1 ---- ---- 2100 Pn50B 输入讯号选择2注1 ---- ---- 6543 Pn50C 输入讯号选择3注1 ---- ---- 8888 Pn50D 输入讯号选择4注1 ---- ---- 8888 Pn50E 输出讯号选择1注1 ---- ---- 3211 Pn50F 输出讯号选择2注1 ---- ---- 0000 与顺序有关的参数Pn510输出讯号选择3注1---- ---- 0000 Pn600 回生电阻容量 10w0 to capacity 0 其它参数Pn601备用参数不可改变----0 to capacity使用者参数 数字名称 设定 内容出厂值0 将CCW 设定至正转方向 0 回转方向选择 1 将CW 设定至正转方向 0 0 速度控制模拟指令 1 位置控制脉冲指令 2 转矩控制模拟指令3 内部速度控制接点指令4 内部速度控制接点指令/速度控制模拟指令5 内部速度控制接点指令/位置控制脉冲指令6 内部速度控制接点指令/转矩控制模拟指令7 位置控制脉冲指令 /速度控制模拟指令8 位置控制脉冲指令 /转矩控制模拟指令9 转矩控制模拟指令 /速度控制模拟指令 A 速度控制模拟指令 /零速锁定 1控制模式选择B位置控制脉冲指令/位置控制抑制2 轴地址 0 to F 设定伺服轴地址 0Pn000 功能选择 基本开关3备用 ----0 经由动态煞车DB 将马达停止1 经由动态煞车DB 将马达停止然后释放DB 0伺服OFF 或警报 发生停止模式2使马达自由运转停止 00 经由动态煞车DB 将马达停止1以Pn406的转矩设定值 将马达减速至停止然后将之设定至伺服锁定状态1 过行程停止模式 2以Pn406的转矩设定值 将马达减速至停止然后将之设定至free run 状态0 AC 电源输入 2 AC/DC 电源输入选择 1 DC 电源输入由1及端子输入0 ALO1ALO2ALO3仅输出警报码 Pn001 功能选择 基本开关3警告码输出选择1 ALO1ALO2ALO3仅输出警报码及警告码ALM 保持在ON0 无1 使用T-REF 作为外部转矩极限输入速度控制操作 T-REF 端子分配2使用T-REF 作为转矩前馈输入 00 无1转矩控制操作 V-REF 端子分配1 使用T-REF 作为外部转矩极限输入 00 作为绝对编码器用 1 作为增量编码器用 2 绝对编码器用途2作为绝对编码器用 使用多次转动极限Pn002 功能选择 基本开关3 未使用 0 ---- 00 马达速度1V/1000r/min 2 1 速度指令1V/1000r/min 2 转矩指令1v/100﹪ 3 位置偏差0.05v/指令单位4 位置偏差0.05v/1005指令单位5 指令脉冲频率1v/1000r/min6 马达速度×41v/250r/min7 马达速度81v/125r/min 8 9 A B C D E 0 1模拟监视1 转矩指令监视模拟监视2 速度指令监视F备用参数不可改变2 未使用 ---- 0 Pn003 功能选择 基本开关3未使用---- 0 0 使用内部转矩指令为条件准位设定Pn10C 1 使用速度指令为条件 准位设定Pn10D 2 使用加速度为条件 准位设定Pn10E 3 使用偏差脉冲为条件 准位设定Pn10F 0模式开关选择4不使用模式开关0 PI 控制 1 速度回路控制方式1 IP 控制2 未使用 0 ---- 0 Pn10B 增益应用 开关3未使用 0 ----使用者参数 数字名称设定 内容出厂值 0 仅在操作开始时调谐 1 经常调谐 0 ON-LINE 自动调谐方法2不执行调谐 00 有效 1 速度回馈补偿选择 1 无效 1 0 磨擦补偿无效无效 1 磨擦补偿小 2磨擦补偿选择2磨擦补偿大0 0 ---- Pn110 ON-LINE 自动调谐开关3备用参数 不可改变 1 ---- 0 0符号脉冲正逻辑 1 CW+CCW 正逻辑 2 A 相B 相1正逻辑 3 A 相B 相2正逻辑 4 A 相B 相4正逻辑 5符号脉冲负逻辑 6 CW+CCW 负逻辑 7 A 相B 相1负逻辑 8 A 相B 相2负逻辑 0指令脉冲形式9 A 相B 相4负逻辑0 当讯号变高时清除 1 在讯号的升缘处清除 2 当讯号变低时清除 1偏差计数器清除讯号形式3在讯号的下缘处清除 00 在BASE BLOCK 时清除 1 不清除 2清除操作2当有警报时清除0 Line driver 讯号指令输入滤波器 Pn200位置控制指令选择开关3滤波选择1开集极讯号指令书输入滤波器使用者 参数 数字 名称 设定 内容出厂值 0 将输入讯号分配成与SGDB 服务器相同 0输入讯号分配模式1可自由分配输入讯号0 SI0CN1-40端子 1 SI1CN1-41端子 2 SI2CN1-42端子 3 SI3CN1-43端子 4 SI4CN1-44端子 5 SI5CN1-45端子 6 SI6CN1-46端子7 设定讯号有效 1 /S-ON 讯号8设定讯号无效SI0 2 /P-CON 讯号 0 to 8 同上 1SI1 Pn50A3 P-OT 讯号0 to 8 同上 2SI2 0 N-OT 讯号 0 to 8 同上 3SI3 1 /ALT-RST 讯号 0 to 8 同上 4SI4 2 /P-CL 讯号 0 to 8 同上 5SI5 Pn50B3 /N-CL 讯号0 to 8 同上 6SI6 0 /SPD-D 讯号设定内部速度0 to 8 同上 8OFF 1 /SPD-A 讯号设定内部速度0 to 8 同上 8OFF 2 /SPD-B 讯号设定内部速度0 to 8 同上 8OFF Pn50C3 /C-SEL 讯号控制模式切换0 to 8 同上 8OFF 0 /ZCLAMP 讯号零锁定 0 to 8 同上 8OFF 1 /INHIBIT 讯号使脉冲指令失效0 to 8 同上 8OFF 2 /G-SEL 讯号切换增益 0 to 8 同上 8OFF Pn50D3备用0 to 8 同上8OFF使用者参数数字名称设定内容出厂值0 使失效1 SO1CN1-25,26端子2 SO2CN1-27,28端子0 /COIN 讯号3 SO3CN1-29,30端子1SO11 /V-CMP 讯号0 to 3 同上1SO12 /TGON 讯号0 to3 同上2SO2 Pn50E3 /S-RDY讯号0 to 3 同上3SO30 /CLT 讯号0 to 3 同上1 /VLT 讯号0 to 3 同上2 /BK 讯号0 to3 同上Pn50F3 /WARN 讯号0 to 3 同上0 /NEAR 讯号0 to 3 同上1 备用0 to 3 同上0未使用2 未使用 0---- 0 Pn5103 未使用 0---- 0控制回路有三种位置速度和转矩根据不同的使用控制方式这些回路在控制器或驱动器里是关闭的基本上驱动器是控制马达的转矩的速度和位置由调整对驱动器的转矩量而变化控制回路图标了个别的性能因子被控制在驱动器内的方式下达一个命令并与反馈(实际性能)相比较用两者的误差乘以一个可变增值这个新的偏误差作为一个指令下达给下一个回路或驱动器的功率极转矩控制在转矩控制方式里马达将在任何转矩所允许的速度下走在无负荷的情况下全速只需要很小的转矩速度限制可以下用两种方式设立预设速度限制使用参数值(Pn407)作为最高速度仿真速度限制使用V-REF输入作为最高速度在速度控制方式里马达将使用所有的转矩在所命令的速度下旋转有三种方式可用来限制马达所产生的转矩的量1.内部转矩限制2.外部转矩限制3.仿真转矩限制段速控制方式增幅器可接受三种类型的脉冲串作为一个位置命令脉冲和方向CW+CCWA相+B相(译码器)电子齿轮比如没有电子传动(即比值设为11)那么命令脉冲译码器行 4当一个传动比值设立了命令脉冲将乘以换算因子(Pn202对Pn203的比值)零钳位为了使用零钳位必须具备以下三个条件必须是在一个使用零钳位的方式里(只有速度控制方式或接触器速度控制方式)/ZCLAMP(零钳位许可)必须是开马达命令必须在零钳位水准(Pn501)以下过行程增幅器带有一个过行程输出可在马达行走中停止马达多数情况下这些输入在驱动器里是禁止的因为高等的控制器具有此功能通过把Pn50A.3和Pn50B.0设为8这些输入可被禁止当过行程发生时驱动器如何做出反应用户可自行配置绝对译码器机器通电后第一步要做的是把机器回归到一个已知的位置这个过程需要几秒钟或几分钟使用绝对译码器可节省时间因为它能记住位置这个位置数据可在少于一秒钟之内输送到主控器安川电机的绝对译码器在A译码器频道上连续提供绝对数据因而任何可以解释连续信号的控制器都可使用这种译码器煞车制动如果在同一时间内马达失效及制动连锁松开马达会下降一定的程度这是由制动器机械传动时间所引起的这个问题可用Pn506(制动时间延误)矫正而使马达保持较长时间的能量来提供传动的机械制动时间如果马达正在运行时电源切断用户常数Pn507和Pn508可用来决定何时启用制动器Pn508表示从电源切断到制动器激活之间的最长时间Pn507表示制动器激活速度如果速度降到低于此速度制动器将激活如果电源切断首先发生的因素(经过的时间长于Pn508或速度降到低于Pn507)将引起制动器激活向前送料向前送料增值只出现于增幅器在位置控制方式中时这个增值查看命令脉冲并推倒出一个以这个命令为基础的速度命令由此提高马达的速度并减少定位时间一个速度命令的百分比(设在Pn109)将加在速度环路的命令上偏增值只出现于增幅器在位置控制方式中时只要马达不在正确位置这个增值就附加一个常速正确位置的窗口设在Pn108在有太多的误差时此方式可使马达更快地进入位置平滑运转当使用模拟指令电压时增幅器可提供加速度和减速度时间这一特点也可用于接触器速度控制方式常数是用ms的单位来设立的但是这个时间必须参考于最高速度自动调谐使用自动调谐的方法非常简单用Fn001设立自动调谐的刚度它与机器的硬度相对应用Pn110.0打开自动调谐(一次性或联机)用Fn007储存自动调谐的结果这样可使增幅器下一次从正确的负荷惯力水准开始自动调谐对大多数的应用来讲效果很好但某些需要很高功能的应用必须由手来进行调谐以下情况下勿用自动调谐使用转矩控制方式时使用转矩向前送料机能时用G-SEL输入来更换增值时手动调谐时在自动调谐过程中增幅器使用自动调谐机能来判断哪一种增值对系统最有利只有最基本的调谐参数可用自动调谐来调整Pn100-速度环路增值Pn101-速度环路积分时间常数Pn102-位置环路增值Pn401-转矩指令过滤器时间常数有三种自动调谐的设立方法(由Pn110.0设立)自动调谐关闭-当系统被手调时去掉自动调谐仅在通电时自动调谐-用于负荷惯力在操作时无改变时联机自动调谐-用于负荷在操作时有很大改变时在增幅器内的比例增值设在Pn100(速度环路增值)这个增值的效应与Pn100的设立成正比这个增值查看速度误差的总量并使用一个与那个误差成正比的纠正量当有很多误差时比例增值帮助减少误差诸如在加速度时增幅器内的积分增值设在Pn101(积分时间常数)这个增值的效应与Pn101的设立成反比这个增值查看速度误差的积分并使用一个与那个误差成正比的纠正量积分增值在只有很少误差时起作用诸如在横向移动(恒速)操作时位置环路的比值设在Pn102即位置环路增值这个增值的效应与Pn102的设立成正比这个增值查看总位置误差量并使用一个与那个误差成正比的纠正量惯力比值设在Pn103这个值可用以下的方程式来计算Pn103=(JL JM)100﹪这个参数是在定尺寸时计算的或可在自动调谐时被自动设立如果惯力改变设立这个参数可使调谐更为容易如果机器出现高频率的振动使用转矩指令过滤器时间常数也许是适当之举这一参数可被用来改变增幅器的频率反应以预防高频率振动提高转矩指令过滤器时间常数会降低伺幅机的性能所以当设立这一参数时一定要把它设在不会引起共振的最低值模式开关模式开关的使用可减少过度的发生和设立时间自动方式开关可把转矩或加速度速度指令或误差脉冲作为-加速度或转矩个开关点从一个目前增值最高的增值数开始逐渐减少所调谐的增值如果增值因所要求的系统的强烈反应而无法调低这个系统的某些机械部分必须改变用硬度更高的机械部件来提高系统的刚度减少负荷惯力伍监控软件点选Sigma Win联机伺服马达联机中侦测中侦测完成,点选OK功能键File功能键View功能键Parameters功能键Help热键伺服状态监视输入及输出状态监视故障状态监视通讯和编码器监视使用者参数监视更改使用者参数传送使用者参数自动调谐手动调谐调整模拟输入偏移量,模拟输出偏移量,模拟输出增益,电流侦测偏移量图形监控陆故障排除警报显示警报名称意义A.02 使用者参数失效服务器EEPROM资料异常A.03 主电路译码器异常电源电路侦测异常A.04 使用者参数异常使用者参数设定超出许可范围A.05 组合错误伺服马达与伺服驱动器容量不匹配A.10 过电流或散热器过热有一过电流流过IGBT散热器过热A.30 回生异常回生电路故障或回生电阻故障A.32 回生过载回生电能超过回生电阻容量A.40 DC过电压主回路DC过电压A.41 DC低电压主回路DC低电压A.51 超速马达转速过高A.71 过载高负载马达大量超过额定转矩下操作数秒或数十秒A.72 过载低负载马达大量超过额定转矩下连续操作A.73 动态制动器过载当动态制动器作用时旋转的能量超过动态制动器电阻容量A.74 突波电流限制器过载主电路电源在ON与OFF间频频转变A.7A 散热器过热服务器的散热器过热A.81 绝对值编码器备用电池错误所有的绝对编码器电源均已失效且位置数据已被消除A.82 编码器CHECK SUM检查错误编码器内存的CHECK SUM检查结果不正确A.83 绝对值编码器电池错误绝对值编码器电池电压降低A.84 绝对值编码器资料错误所收到的绝对资料异常A.85 绝对值编码器超速当电源接上时编码器高速旋转A.86 编码器过热编码器内部温度太高A.b1 速度指令输入读出错误指令速度输入的A/D转换器故障A.b2 转矩指令输入读出错误指令转矩输入的A/D转换器故障A.bF 系统警报服务器内发生一个系统故障A.C1 伺服超速运转伺服马达失控AC8 绝对值编码器清除异常及多次转动限制设定异常绝对值编码器多次转动未正确清除或设定A.C9 编码器通讯错误服务器与编码器间无法通讯A.CA 编码器参数错误编码器参数故障A.Cb 编码器回授错误与编码器的通讯内容不正确A.d0 位置错误脉冲满溢位置偏差脉冲超过参数Pn505 A.F1 电源线欠相主电源一相未接CPF00 操作器传输错误操作器与服务器传输失效柒容量计算点选MOTOR.3E 选择计算单位选择伺服马达种类选择机械架构输入表格所需资料计算连结器及齿轮惯量输入计算惯量之机械结构开始计算容量得到运转曲线马达速度及转矩。
安川伺服驱动器使用说明书.

资料编号SICP S800000 45C用户手册设计²维护篇模拟量电压²脉冲序列指令型/旋转型©-V系列伺服单元SGDV伺服电机SGMJV/SGMAV/SGMPS/SGMGV/SGMSV/SGMCSAC伺服驱动器概要面板操作器接线和连接试运行运行调整辅助功能(Fn□□□监视显示(Un□□□全闭环控制故障诊断附录版权所有© 2007 株式会社安川电机未经本公司的书面许可,禁止转载或复制本书的部分或全部内容。
iii请事先务必阅读本手册是对©-V 系列伺服单元的设计、维护所需的信息进行说明的手册。
进行设计、维护时,请务必参照本手册,正确进行作业。
请妥善保管本手册,以便在需要时可以随时查阅。
除本手册外,请根据使用目的阅读下页所示的相关资料。
本手册使用的基本术语如无特别说明,本手册使用以下术语。
关于重要说明对于需要特别注意的说明,标示了以下符号。
本手册的书写规则在本手册中,反信号名(L 电平时有效的信号通过在信号名前加(/来表示。
<例>S-ON 书写为/S-ON。
基本术语意义伺服电机©-V 系列的SGMJV、SGMAV、SGMPS、SGMGV、SGMSV、SGMCS (直接驱动型伺服电机伺服单元©-V 系列的SGDV 型伺服放大器伺服驱动器伺服电机与伺服放大器的配套伺服系统由伺服驱动器和上位装置以及外围装置配套而成的一套完整的伺服控制系统模拟量²脉冲型伺服单元的接口规格为模拟量电压²脉冲序列指令型M-ⅠⅠ型伺服单元的接口规格为MECHATROLINK-II 通信指令型²表示说明中特别重要的事项。
也表示可能会引起警报等,但还不至于造成装置损坏的轻度注意事项。
iv©-V 系列的相关资料请根据使用目的,阅读所需的资料。
资料名称机型和外围设备的选型想了解额定值与特性进行系统设计进行柜内安装与接线进行试运行进行试运行²伺服调整进行维护和检查©-V 系列用户手册设定篇旋转型(资料编号∶ SICPS80000043AC 伺服驱动器©-V 系列综合样本(资料编号∶ KACPS80000042©-V 系列用户手册数字操作器操作篇(日文版(资料编号∶ SIJPS80000055©-V 系列AC 伺服单元SGDV安全注意事项(资料编号∶ TOBPC71080010© 系列数字操作器安全注意事项(资料编号∶ TOBPC73080000AC 伺服电机安全注意事项(资料编号∶ TOBPC23020000v与安全有关的标记说明本手册根据与安全有关的内容,使用了下列标记。
安川伺服说明书-功能
功能说明高性能化功能在机械的固有振动频率较低时,通过将机械系模型化补偿其滞后,从而抑制其振动。
利用该功能,可缩短低刚性机械的整定时间。
与机械的驱动系发生振动时,利用观测控制使其减低,实现高伺服增益的驱动。
通过该功能,改善伺服特性。
当机械产生高频共振音时,设定与机械系共振频率一致的振动泸波器,从而抑制共振。
由于轴共振引起伺服系起振时,通过转矩指令泸波器抑制轴共振。
由于采用了速度观测,实现了低速下的平滑运转和定位整定时间的缩短。
为改善电机加减速运转时的过渡特性,速度环的P1(比例积分)控制和P(比例)控制可切换。
从而抑制过调和欠调。
因加入了前馈补偿,从而缩短了定位时间。
当欲缩短定位时间时,可根据负载条件使用。
使用速度控制时,有时即使速度指令为“0”,由于漂移亦会产生移动。
零箝位动作就是与速度指令低于设定值时,经位置环将伺服锁定而使其停转的功能。
功能简单设定功能连接即动,简单设定。
由于惯量恒定精度的提高,所以无需调整伺服增益。
伺服驱动器判断伺服电机的功率、规格、无需设定电机参数,当连接不适用电机时,有报警显示。
可监控转矩指令的有效转矩运算值。
可监控再生电力的负载率。
累积负载率再生负载率80%50%再生过载报警前,可预先发出信号。
避免不经意间改写用户参数。
标准配备计算机接口,可进行用户参数的设定,速度转矩指令,监控波形的描绘及1:N通讯(N=14)。
无需输入指令,使用手操器亦可操作电机运行,便于试运转。
即使电源掉电,亦可记忆10次过去发生的报警,便于故障判断。
灵活应用功能通过与上位控制器之间的输入输出信号的分配,在9个信号中可进行3类选择。
在码盘的原点脉冲位置定位停。
用于电机轴和机械位置的匹配。
除可分别使用位置,速度及转矩控制外,亦可进行各控制模式的切换。
限制通过电机的最大电流,抑制过大的转矩的产生,应用于防止机械损坏。
可使用绝对值编码器。
使用了绝对值编码器,将无需原点复位动作,断电复位后,可即时起动。
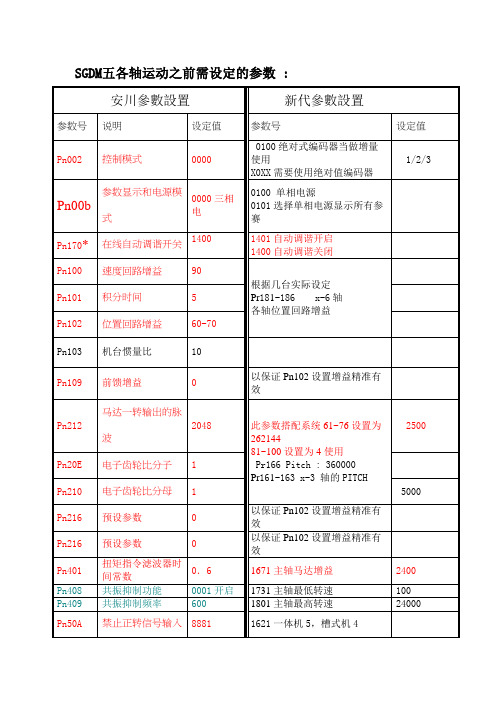
安川SGDM二--新代参数设定
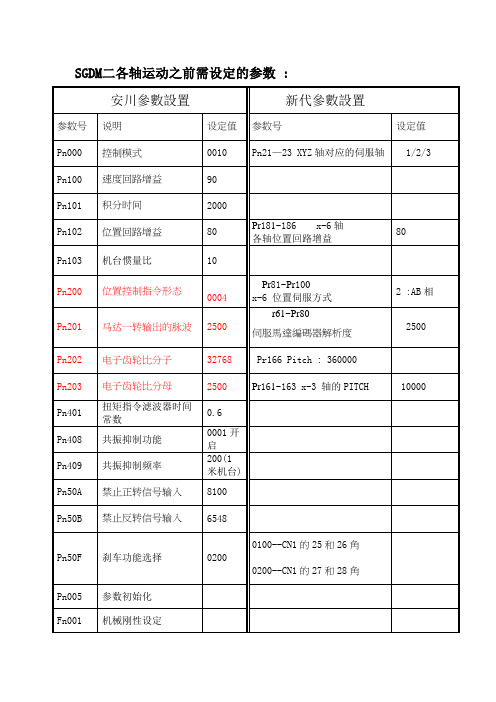
安川參數設置
新代參數設置
参数号
说明
设定值
参数号
设定值
Pn000
控制模式
0010
Pn21—23 XYZ轴对应的伺服轴
1/2/3
Pn100
速度回路增益
90
Pn101
积分时间
2000
Pn102
位置回路增益
80
Pr181~186 x-6轴
各轴位置回路增益
80
Pn103
机台惯量比
10
Pn200
位置控制指令形态
0004
Pr81~Pr100
x-6 位置伺服方式
2 :AB相
Pn201
马达一转输出的脉波
00
r61~Pr80
伺服馬達編碼器解析度
2500
Pn202
电子齿轮比分子
32768
Pr166 Pitch : 360000
Pn203
电子齿轮比分母
2500
Pr161~163 x-3 轴的PITCH
Fn001
机械刚性设定
Pn110
在线调谐设定
10000
Pn401
扭矩指令滤波器时间常数
0.6
Pn408
共振抑制功能
0001开启
Pn409
共振抑制频率
200(1米机台)
Pn50A
禁止正转信号输入
8100
Pn50B
禁止反转信号输入
6548
Pn50F
刹车功能选择
0200
0100--CN1的25和26角
0200--CN1的27和28角
Pn005
参数初始化
安川伺服驱动器使用说明书1(1)
8.参数的初始化
设置Pn000=XX1X;X代表默认
5.控制方式的设置
设置Pn000=XX1M(M=0/1,代表不同方向);210的参数
电子齿轮B/A=Pn20E/Pn210=(分辨率/最终1圈移动量)*(电机/末机)
示例:
7.滤波设置(重要)
改为集电极开路即:
设置Pn200=n.1XXX;X代表默认
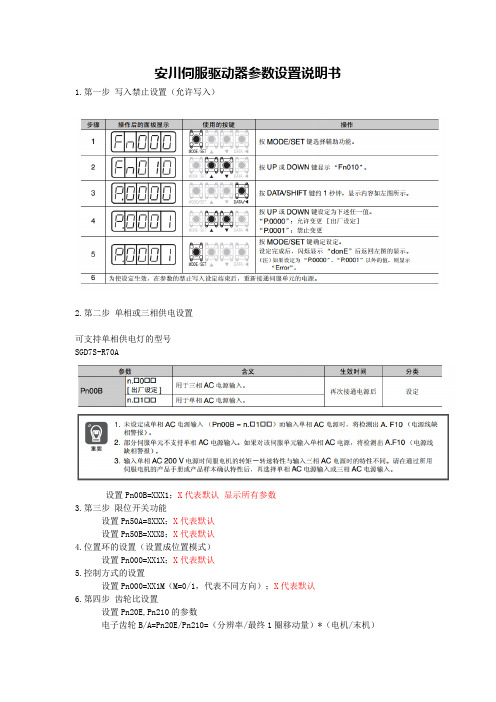
安川伺服驱动器参数设置说明书
1.第一步写入禁止设置(允许写入)
2.第二步单相或三相供电设置
可支持单相供电灯的型号SGD7S-R70A
设置Pn00B=XXX1;X代表默认显示所有参数
3.第三步限位开关功能
设置Pn50A=8XXX;X代表默认
设置Pn50B=XXX8;X代表默认
4.位置环的设置(设置成位置模式)
安川伺服使用手册

安川伺服使用手册珊华电子科技(上海)有限公司 2011年3月目 录第一章 安川伺服简介1.1产品的确认1.2产品的型号第二章 安川伺服接插件2.1 S-II系列(3kw、15kw)2.2 S-V系列 (400w、750w)第三章 安川伺服调试3.1 主要的参数3.2 两主轴同步性第四章 安川伺服常见报警处理4.1 常见的报警4.2 处理方法第五章 安川伺服的安装5.1 伺服电机安装事项5.2 伺服驱动器安装事项第一章 安川伺服简介1.1 产品的确认1.1.1 产品的确认事项产品到货后,请就以下项目进行确认。
在以上各项的确认中, 如发现有不妥之处, 请及时与所购地的销售店或本公司的销售处联系。
1.1.2 伺服电机的铭牌确认项目备注到货产品是否与您订购的产品型号相符? 请通过伺服电机、SERVOPACK( 伺服单元) 的铭牌的“型号”栏进行确认( 请参照下一项以后的说明)。
伺服电机的旋转轴是否运行顺利? 能用手轻轻转动则属正常。
但是“带制动器的电机”则不转动。
是否有损坏的地方? 请查看整个外表,检查是否有因运输等引起的损伤。
其中生产编号中的第三、四位是年份,第五位是月份。
例如:DD 996 456789001299年 6月(其它英文字母代表:X-10月份、Y-11月份、Z-12月份)1.2 产品的型号1.2.1 S-II系列伺服电机:伺服驱动器:1.2.2 S-V系列伺服电机:伺服驱动器:第二章 安川伺服接插件2.1 S-II系列(3kw、15kw)3KW伺服电机型号:SGMGH-30ACA61电机侧编码器接插件:L形插头 MS3108B20-29S电缆夹 MS3057-12A电机侧动力接插件:L形插头 MS3108B22-22S电缆夹 MS3057-12A驱动器型号:SGDM-30ADA驱动器侧(CN2)编码器接插件:55100-0670**驱动器侧(CN1)50芯I/O接插件:连接器 10150-3000PE**壳体 10350-52A0-008**15KW伺服电机型号:SGMGH-1EACA61电机侧编码器接插件:L形插头 MS3108B20-29S电缆夹 MS3057-12A电机侧动力接插件:L形插头 MS3108B32-17S电缆夹 MS3057-20A驱动器型号:SGDM-1EADA驱动器侧(CN2)编码器接插件:55100-0670**驱动器侧(CN1)50芯I/O接插件:连接器 10150-3000PE**壳体 10350-52A0-008**2.2 S-V系列 (400w、750w)400W 伺服电机型号:SGMJV-04AAA61电机侧编码器接插件:插头54346-0070****插针56161-8081****电机侧动力接插件:J27-06FMH-7KL-1M-CF**(套件:包含插头、插针) 插头插针驱动器型号:SGDV-2R8A01A驱动器侧(CN2)编码器接插件:55100-0670**驱动器侧(CN1)50芯I/O接插件:连接器 10150-3000PE**壳体 10350-52A0-008**750W 伺服电机型号:SGMJV-08AAA61电机侧编码器接插件:插头54346-0070****插针56161-8081****电机侧动力接插件:J37-06FMH-7KL-1M-CF**(套件:包含插头、插针) 插头插针驱动器型号:SGDV-5R5A01A驱动器侧(CN2)编码器接插件:55100-0670**驱动器侧(CN1)50芯I/O接插件:连接器 10150-3000PE**壳体 10350-52A0-008**第三章 安川伺服调试3.1 主要的参数1)PN000 控制模式选择最主要是第1位(速度、位置控制方式的选择)2)PN100 速度环增益在速度控制,增加设定值可以提高响应性3)PN101 速度环积分时间参数降低设定值可以提高响应性4)PN102 位置环增益在位置控制,增加设定值可以提高响应性5)PN103 转动惯量比最好能设定为与机械惯量实际越接近越好6)PN110 在线自动调谐类开关如果负载基本不变的话,需要把第0位,改成2-不调谐。
安川 简易手册(西格玛5系列位置控制)

安川简易手册(西格玛5系列)(创研华科技)亲爱的用户请注意:以下内容根据安川手册摘要编成。
如有进一步的问题,请参考使用手册及咨询深圳创研华科技电话:0755-********,传真:0755-********,手机:139********安川西格玛2系列,目前主要是850W~15kW功率电机;市面上主要出现的电机型号:SGMGH —**ACA**,驱动器:SGDM—**ADA。
小功率(750W以下)现已全部升级切换到西格玛5系列,其电机型号:SGMJV-*******,驱动器:SGDV-***A01A。
预计大功率伺服也将升级切换过来。
西格玛2系列的产量将逐步减少。
二.位置控制模式7-8(指令脉冲输入) 11-12(指令符号输入) 15-14(清除输入)端子,指令控制器侧的指令脉冲偏移脉冲清除信号的输出电路可以从总线驱动器输出集电极开路输出(2种) 的3种中任意选择,其中要注意的是集电极开路,客户外部供电要注意电压和电流,过大要串电阻,以限流!2.主要参数:Pn000如果=0011,电机(正反转)取反。
Pn000:控制方式选择,出厂值是速度控制模式0000,改为0010位置控制模式Pn00B:输入电源为单相,则改为0101,即以单相电源输入使用三相输入规格。
如果=0100,则部分参数(如增益有关等)不可修改。
Pn200:位置控制指令形态选择,可以选择是正负脉冲还是脉冲加方向,也可以选择正负逻辑。
Pn100:速度环增益Pn101:速度环积分时间参数Pn102:位置环增益Pn103:转动惯量比Pn170:如果在上电伺服使能后电机有噪音,则改为1400。
Pn50A:此参数是用于I/O口的分配,出厂值为2100,第三位上的0表示外部使能,即CN1口的40和47脚之间有24V电压时,电机处于使能状态,此时CN1口的5和6脚之间有模拟电压输入,电机就可以旋转。
如果改为2170,即上电电机就处于使能状态。
第一位2表示正限位输入口的分配,CN1口的42脚输入信号为ON(L电平)时电机可正转,否则电机停转,即遇到正限位。
安川2系列电机手册 SGDH 安川2系列电机手册 SGDM
请勿在通电状态下拆下外罩 电缆 连接器以及选购件类 否则可能会导致触电 除非是指定的人员 否则不要进行设置 拆卸与修理 否则可能会导致触电或受伤 请勿损伤或用力拉动电缆 也不要使电缆承受过大的力 放在重物下面或者夹起来 否则可能会触电 , 导致产品停止动作或者烧坏 请在机械侧设置停止装置以确保安全 带制动器的伺服电机的保持制动器不是用于确保安全的停止装置 如不设置停止装置 可能会导致受 伤 如果在运行过程中发生瞬间停电后又恢复供电 则机械可能会突然再起动 因此切勿靠近机械 请采取措施以确保再起动时不会危及到人身安全 否则可能会导致受伤 请绝对不要对本产品进行改造 否则可能会导致受伤或机器损坏
表示如果操作错误 将会导致危险情况的发生 可能会造成中等程度的受伤或轻伤 或物品损失
另外 即使是
标识中所述事项 有时也可能会造成严重的后果
表示禁止 ( 绝对不能做的事 ) 例如严禁烟火时 则表示为
表示强制 ( 必须要做的事 ) 例如接地时 则表示为
有关危险的标识会因 ISO 标准与 JIS 标准而异
资料名称
Σ-II 系列 SGM"H/SGDM 数字操作器 使用说明书
Σ-II 系列 SGM"H/SGDM PC 监视用软件 用户手册
Σ-II 系列 全封闭 I/F 装置用户手册 (JUSP-FC100 型 )
Σ-II 系列 MECHATROLINK I/F 装置用户手册 (JUSP-NS100 型 )
维护与检查注意事项
更换伺服单元时 请将要更换的伺服单元的用户参数传送到新的伺服单元 否则可能会导致机器损坏 请勿在通电状态下改变配线 否则可能会导致触电或受伤 请勿拆卸伺服电机 否则可能会导致触电或受伤
然后再重新开始运行
废弃注意事项
安川5参数说明书

附录B用户常数一览SGDM型伺服单元的用户常数、开关、输入信号选择、输出信号选择、辅助功能及监视模式的一览如下。
B.1用户常数一览----------------------------------B-2 B.2开关一览-------------------------------------B-6 B.3输入信号选择一览------------------------------B-9 B.4输出信号选择一览-----------------------------B-11 B.5辅助功能一览---------------------------------B-12 B.6监视模式一览---------------------------------B-13B-1附录B用户常数一览B.1用户常数一览用户常数一览如下。
B-2B.1用户常数一览B-3附录B用户常数一览* 2.用户常数Pn111的设定,当用户常数Pn110.1为“0”时有效。
* 3.当变更该用户常数时,为使其功能有效,有必要将主电路及控制电源OFF后,再将电源ON(电源的再ON)。
B-4B.1用户常数一览* 4.一般设定为“0”。
再生电阻为外置时,设定再生电阻器的容量值(W)。
* 5.上限值为适用伺服单元的最大输出容量(W)。
* 6.仅SGDM型伺服单元的版本升级产品(SGDM-□DA形)配备有该用户常数。
*7.()为SGDM-50ADA以上的伺服单元。
B-5附录B用户常数一览B.2开关一览开关一览如下。
B-6B.2 开关一览B -7附录B用户常数一览* 2.()为当SGDM-50ADA以上的伺服单元时。
B-8B.3输入信号选择一览B.3输入信号选择一览输入信号选择一览如下所示。
B-9附录B用户常数一览=8、Pn50B.0=8。
* 2.只有SGDM型伺服单元的版本升级品(SGDM-□DA型)可以设定用户常数的设定“9”及“A~F”。
安川SGDM五--总线新代参数设定
安川參數設置
新代參數設置
参数号
说明
设定值
参数号
设定值
Pn002
控制模式
0000
0100绝对式编码器当做增量使用
X0XX需要使用绝对值编码器
1/2/3
Pn00b
参数显示和电源模式
0000三相电
0100 单相电源
0101选择单相电源显示所有参赛
Pn170*
在线自动调谐开关
1400
1401自动调谐开启
1400自动调谐关闭
Pn100
速度回路增益
90
根据几台实际设定
Pr181~186 x-6轴
各轴位置回路增益
Pn101
积分时间
5
Pn102
位置回路增益
60-70
Pn103
机台惯量比
10
Pn109
前馈增益
0
以保证Pn102设置增益精准有效
Pn212
马达一转输出的脉波
2048
此参数搭配系统61~76设置为262144
81~100设置为4使用
Pr166 Pitch : 360000
Pr161~163 x-3 轴的PITCH
2500
Pn20E
电子齿轮比分子
1
Pn210
电子齿轮比分母
1
5000
Pn216
预设Байду номын сангаас数
0
以保证Pn102设置增益精准有效
Pn216
预设参数
0
以保证Pn102设置增益精准有效
Pn401
扭矩指令滤波器时间常数
0.6
1671主轴马达增益
安川伺服驱动说明书2
2.4.1 SGMAH/SGMPH 型伺服电机用电缆 - - - - - - - - - - - - - - - 2-17 2.4.2 SGMGH/SGMSH/SGMDH 型伺服电机用电缆 - - - - - - - - - - - - 2-20 2.4.3 SGMCS 型伺服电机用电缆 - - - - - - - - - - - - - - - - - - 2-22
2.3.1 SGMH 型组合一览表
伺服电机 Σ-II 系列 SGMH 型
SGMAH 型 ( 超高功率系列 ) 3000min-1 8 机型
A3(30 W) A5(50 W) 01(100 W)
单相 AC100V A3BD,A3BDA A5BD,A5BDA 01BD,01BDA
伺服电机 Σ-II 系列 SGDM 型
SGMPH-15A 型 200V:1.5kW
②伺服电机主 电路用电缆· 连接器
不带制动器
SGMAH 型 400V:300W,650W SGMPH 型 400V:200W ~ 1.5kW
弯曲型 SGMAH 型 200V:30W ~ 750W 100V:30W ~ 200W SGMPH 型 200V:100W ~ 750W 100V:100W,200W
配备型号 JZSP-CMP00-03 JZSP-CMP00-05 JZSP-CMP00-10 JZSP-CMP00-15 JZSP-CMP00-20 JZSP-CMP03-03 JZSP-CMP03-05 JZSP-CMP03-10 JZSP-CMP03-15 JZSP-CMP03-20 JZSP-CMP10-03 JZSP-CMP10-05 JZSP-CMP10-10 JZSP-CMP10-15 JZSP-CMP10-20 JZSP-CMP13-03 JZSP-CMP13-05 JZSP-CMP13-10 JZSP-CMP13-15 JZSP-CMP13-20
安川SGDM-08ADA驱动调试步骤
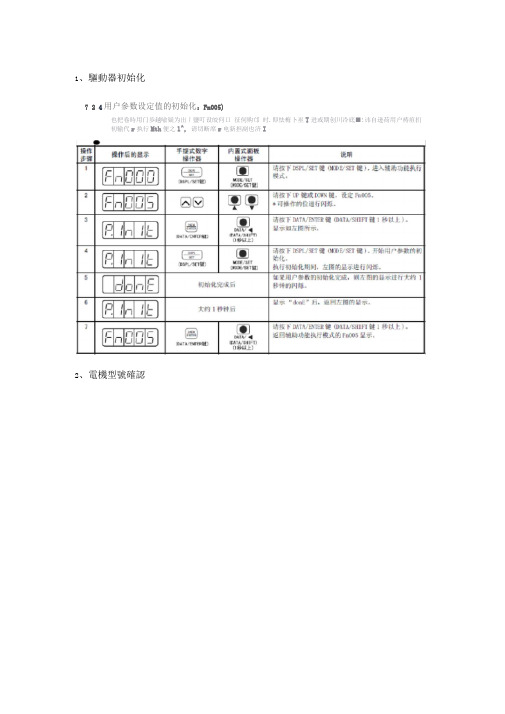
1、驅動器初始化7 2 4用户參数设定值的初始化:Fn005)也把卷時用门歩越喩疑为出丿鹽叮设皎何口征伺购邙时.即怯梅卜巫T进或期创川冷底■!讳自逊荷用户祷疽扪初输代r执行Mth便之1^, 请切断席r电新担副也济I2、電機型號確認7. 2. 9电机机型的确认(FiOin足用十覇yi恫脛申兀卜连按的局服电机机0与电压*客*.韻码器S号亂朋塢码S分瞬車的功链-n且. 斗伺屈单元为特味訓略梟时,叮碇认号码=闿作掾件后的撮示爭提式玫字出119內式面檢«n«l-nGOG -甲产TW;CE.-=LT*-|清胺T BSPL/SET w OMMli/SET宣h进入辅歸功能执H00 ffl卵i*(S—ITKF^UOfiN af.比底FnOH・*可}*柞酌忖迅存国妹-cln ilrj n|/ \u i|u 口fflftATVXKlA.-^IFT 溝K-JJ飢加(DAWSHIFTS 1 W h ) - R.5 m札机型西电爪的眠捌苛眾,i~I' 0” |A U3减ix<as而衬a|K阿- ~QI £列戸—Hi恤删如|M页n~a・MME广qIn|轨1»吊时'8»1;|"-§ » ISGH^口h n i n]』P u I LU:叽•変TWffii^CF -SFTW.-洁K=J}SFL沽臼弋tHtniifSET徒】"至示恆S电机的看口n|j-J n1・』』F uU序中*示1"3«札11- nn t口UU JHB-J:t;si>i/ftr*)诸K下DSFL/SET W "删卫』ibT踊〕,星耳邮t辭贵星[日血旧inc(D ffi 皿侄T w:CF-5rrW^清S U JJ SPL/Stl- W (财卫「•EET «〕. S 示恆S 年丘的R 科■埋粳号码.* -y-4)OOU'显耒农駅|^隹胡.n n| r nu u| 1uy匸_n q dP \n u q d肿TA/ETM#、ffihvv <'D> rA-3J-(H.i:1 iff以U清ff=1MT九也TEKffl UtATVatKTW I KW k L a&0 輔毗洁脸执行Wht&fjFMMS示,3、輸入電路信號分配不要幵关直接PN50A=8170 就是一直伺服使能7.3. 2 •入gfr 的信号分配丹嵋入倩号恨《用尸鲁歎的谟定分配制$5按》的frS (井见衷如卜所示.) (1)4厂时的设定(Pn5(A 0 = 0)冊厂时的井風韓是卜乘中用亀羅播农换的说定.⑵燮更分配时 < 设是Prt50A. 0 = 1)另蚪”已燮更用户蟹ft 时.!^逓时元 执廿-tKafiwr - *韭《鱼起动’以tt 月户冬数生迪*去中的 口表示出厂时的设宦・IB 号a 棕电甲«為値尽Crtl tt 弓平零注接 (椚豳*元 内郡进疔ft 理J 用户斑分t[*1 42 +344454e 洁时右tt sew 羌號同»0HL /S-<K234 5T&PrMH.. 1 = n. KX D XHS-OftF :Hc pE yL /FtW1 1 a d 斗旨 € TIT PrtSW. Z = n Ji 口《H F4:(W 9 A.&c D E F ft萦止丁錯«动 HP OT1 ■345 6T予PnSCM. 3 三 <i_DxjuLHf 019 A总UJ)£F1 拳止反转婪易Hs-ut 0145 6TAP'T MB, 0 - fi.xxK 口 LZN-OT9 ABC U£yP■9VtfiS19L 刃 rai-tej0 I 2 3 4 1 5 e«Pr^Oi. 1 = n. KI OxHAW Fisr 9 A.B C n T E F证时舒》掀#阳ClL Zr-o. 0 1 2 3 4 &巧TPhSCB. Z = n K 口 UK HP-CL 9 A.B C D ' E F反轻拙地限ML/> a 0 12 3 4 5 -□-P A SOS. i = n.rbju Uxa9 4bC 1>J ; T 1 1■内軸ift 圭逸A 注厝L/sn> s 012 3 4fieTPhSflC. 0 - fi.KJtxDH SHJ-D 9 4 BcD E F的昶谀定週建述1¥L/aT>-AI3 34 56Tft PhSOC. 1 = n. El O KHSFD^A g A 0 cnE rPV內ra 避定边A 述W L/SH> li 0 12 3 4 5 «TITP«50C.2 - r\. *口KSTD B 9 1 BC D E F■&控制方式j£拝 L/C Sth0 1 23 45 6TB PnSOC. 1 =■ <i -du KC^Stl9 IB C J)£ 丫丰wL/iXlM0 12 3 45T « phSlOO 0 三 fi.ExitnU ZClAlff'94 B C1)EF P «止指全at 冲L 丿I Mil BITI3345T SPkKSOp. 1 = n. lof 口址HPfflIBIT9 扎0 c pE F1w 在坍携L ZC-Sfl. fl 1■ 3 4 &1ITPn5fl0. Z = n. IL O AXH G-SEL9ABCDEyfP启reuh 祭止芒转聖动.*止Ett 雀址的* 林号* -S 隹良*r 的检锂炊*卩上用时*当爾佶号垓 引挾环1£港1*况时* M 不fl 養全疔闽功柞.如聲甘干博已》理柠此奨H 览吋* «务盤対功作図左全方面进衍(* 认-箱序■^佶号廿K 结同一權人电RtH.已■入的怕号电平裟时浙肓亡舟配前伯号起柞用・PnSQA :RC司| P 阳QB ; [口石5p^回2.1.(©議人信号的分配实例越T.£®示卅了甘配給^?4-«的问議吊酗/5炳}与升E 給打的104W 外翎刑币碣制(T a;代r 更視歩 5更比窓屜]—> hK 归什PrrMSiBgBBB呼提式数字 *« 祥 fli说明 i.'CSH. SL 咂 4W 硏■OK.•甑r ・) nP /GOSICAU EKTDWJDxrv 4 汕即UM 沽ft w jfcPL/Stl- vt (MUUE.-^JlJl- » >,进入靈敷^5^矩換£” .牡显不旳sm irr 清炭7曙蘿或iw 祇W. ft 徒*可擾惟的徨蛙f 亍闻握.讷按=时也.化订皿« (DAEiVhHlH ttTtW hJ.显禾 巧伍岫的半和藏埠.I 卑阿g 曲配给J iQ I:u*W :'00njpI5| I 画阿A LM :LAttt ffl CulTJk.- 4 :1:>(v4l'JP :- ;iMW 上)按F LEFTK 厦s Kiarr 就 gmt/SHirr *).送澤从右 fffe 的弟2竝,搔下11F«,改定丸"5 JI ff/g 慣的肿配乩ai 4,l>隻更掬et 45 J沽ft 节im 丸Ixrai 鲨(jiAnVsHiM It i 粒规卜.井桩保#.I 二时,CMTbtt 陌迪•j/F^Lffl'titiiSR 进竹弍ft ・ J 10O _ 匚r(\oHEsUErr 5 S □nj G耳-|3Ab 5 G b12圉 加AETUtHJ@iCATX iIWURgnra afe) I 斑TA EHrZPWl 】DAT A ■-4 :ii ;m/SHEI: lIMM 上) ffi ■V»J〔•〕 D*吟i jATViHE"曲从IJiSl»T*.4:颐 51IFIW_D*T*- 4 lAtViUFTj睦下 DAT V E ^H ⑴贰TWaujTW I tH'JJ \. igR FnSOrtS 币.设定 Ph&tSE.*可揚的慣电疗闪毎.哺质下DATA 吃NT Of 逮 迴肝.g 【Fr 戰1 ). Pn5(lB 的斗前壮堀一 i 轉:沖-(X#FSe 给口【一我-)按-UiFT 覆駅吿Hl 住R 5( <MiA ailPTfl!)T 送卑取右 «起的第龙险” & rum^ W. ft 定为-0". (箱/Fd 的为KAV GL 少芟史丸c^L-4». ?i|*K~IiATA/J3TEit«' (DAT.VSHEKT 直 1 抒以片此吋fflMT 杠4如「扛 SHliffj 晏侧&入荷号選母血5曲F T 占0C)穷费更土裁.谴赴廿U 也换巫起誌a 作".iPAlJb^TlW按r ijArA?E?frtH« (u 削A /删irrw i 柠以十返回FnMl 显杀-这样輕^^応ttt 分配蚩CM 45+ /P 4X 分ic^Oll 40. 4、機械和伺服驅動配套調試3.1.3机«与伺服电机配*试运行△危险,示诳厅車节(^^示的播席-齐帼W电机和机械逹接£的狀茜下・知甲戏T-黑带蒂通' 机W世冊坏.弃叶耐at圭需秋人勺筋言+46-瞩认方證与忡乳说《1谓擾通咆頸+連侶有笑亶程与騙闻漳警ffi沪孑fe的机谀定-诸靈展“ESjfiffl基星冷陡射S定””的伺哪遐扒叶傩住+卷寧駅防』机械《燃鎖卞U及松力厂土提甜的职时措A的羞ft 丫映询制盘站的诙性.« i*认何s也机的动fr>i!U边&霭n;知;鬲.i*S(® ■肢14保持刪礒总的便定”■2吉段掘使用朗腔鬣樓』匚谡铠折S朗用户鉴數. 根朋世申前睡理棋忑 *靈翅-S. □速*控申M现桩肛也乐抬寺〕選疔” 乍.fi世S控制运亡"飞1 Rff卅书聞盯”3洁芒切斷迪癲的状击下”用Rtt节专產股馬S电机7礼桩-诫葬頤■烏1恆ffl电机安转过倉屮JS"-qi#S 斛何IS单兀刘阿'□■KI:恆S咆机尊通-电^^;古)> C,授站讥幅C, »电薛-琲再谴壽眄"S. a通用荃車:^肚的盘定”一t!莊比匚的舸在远帀叶览生舁蓮・刘可懐仃ftW左空粹止的當芯惮lib"5谱粳腿”8^1.甘a过卜sf旨争遷和恫呼电机牟律的试远纭“的巻蹟口*在机《崎用《迟机已左1&越的状雷T^f-试近疗.请葩认幕舉与fl郎诅机罩佩的虑运石?U同-另蚱丑:诂Ml认1&令单粧与a定与机械啊帯・0«再肉鑑认诩卢蠢盟徙宦与甘莽J前控钊揽丄E相荷" 漕《认阳机足迂按爆(?坤t咕作崛fi理尸腿打./#檯1^需娶iie隹衆臂益収违豪贬®遇机的呃捋惟. 请$咀-3. 1 IS®'"'.应用时叮旌会日冋L;糧鞋的.塞台g'T更莎曲卷S、冈纯斶丸分地进E殴拧.B了桔护吾设定的闻户歩殆记ft于“化4用户慕銘S■疋香命就”屮・至fe -林厳*j尼曙;电机£鲁述杼r已异瓷健5、位置模式參數設定控《1»至*打護列加載胃上.S.6位S 控制运行 8.6.1用户参数的设宦冃毓冲菟谊行&SS 制时.请ia$y 下用户费数-⑴揑制方式选痒#52tn-nnin控制.h 丈送犀:4揑制1.肚沖兎阳专)⑵脉冲指令形态的选择种类連搏Stt 号SIP栽扎ftLS(M 7 柿哼Wc 冲tt 入yWLSOiHi吊哼曉冲tt 入 SICA CSbll 罰号ft 人 /■5IG □HTM咼号愉人 冋團車并#!的》入冊崔皓帳《猜号控制的現博S 起ffl 户#fep 】迪M4.FF 转指令6、電子齒輪設定ffl 户期Pn200“□□EM 咼号-澤冲芳百正谴a s陷冷厂时的世IL □□口 1 n 口 nn2 luDora (tnaosIt □□匚ft n. □□□?"□□Da n.CTHXlV 止遽轲1刃- 兰国脈种 电正遞W1押号4樣冲列0755»)CWEC 5;逆■补充就>=將ts 蓋:唧曜冲掃令形:S 时,可住定1軒人 倍購.N LXLX2rULla jni n n«W1*7|511=14 J H 匡草 PiXS :Ch c -r. -|Lft 平:CNMij—11—I J —VtC.M ./■) U U U:Kii -f|.呻.平1CM >11- 4 _ jCh-・T| — H 电.¥EC 屠 --- I -- 1 -- ICMFI ■' l 「卄紀 Fg |~~|1~1 fC-vl-71 - '—'"―spM i_ri_r~L rCN"-F :—* El*尝需-JkJLJlPitsgi-r> =fi =1=n =.!■ 士呂 T __ L也口 _j —L_ 护M ・・T) —" J 习Chi 1_ITT- (Chi-1i>PULH —叫g 」 H ■石 Olift I帼屮帥-nnr-vEU 」 仆'・irFU I _Scn(CM ;Hift?:[:FT F«>闻《电£茁环3” 6亡电子齿轮的设定 ⑴塢码壽脉坤KSGMan-aucacoa 伺廉电Msiv/I(沖』勺瓷电机孕号叶芯方S.谒需阳 壮.1何S 毛斤卒■HE 判耳方er.去示常「再理甘**谊俎範与《1怨》¥ 4遂阳[丄惜.H 憔】《»沖褻同-坍可aft 丼®装* F 榕"IO 工吞一 篝干承T 涉珂+吧垃费・⑵电子齿轮屯T ifi Jtmiit 量疳町持轴遁于佶亍揑底蟲藕%茂t L »科習J 工杵《訥■il 定俎任:的功0£, 康h F 挣,揑舰»闘描字1躲冲即AH •個!5叫tt -1膺专寧住".申ft 用电子古盜in >EZhl mrTT^J^tri 城葩廉冋31ex 书弧-**H +I=#SPO ™I曲11 ■菊亦i?tfl hi«^*由于卑秒dm 沖境苗-9 1. ISUSX 20U' i l 』63」u 并 ULtrl1n5JK :itA<'tt4«A.蛮一jft »aejii*怛« a 上事尸.迸用电子書蛇i*rr^ IS 呼* 陀.iRIT f JI JJj t r rm砂咼*7牛庁:觐中匚啬扫単桓*舟工粧if 武m fflTflhH 令•忡aAl-E 麻*工杵事iSJ'EHsWK*讨 也于«:卫制耳二’U* lodoa q iDCtc 畑 lfV :1剜4”®株石*陆丸.⑶书;t 用卢蛙数PtiSM申于*幣(炸F ) 丨仙丨竝电n竝T 位 出厂时朗设iE[皑学丘皑:旳1 1 r 怙隅 一斗1 1 «菱 阳303电子艺花(分《 ?1 f^g 丨魅(cnftX 甲也商厂討昭《老咆週审见斎1 1 = «iX-1戛定1*^电机«吕扇盘證吋机鼻11^(直H MEIB 乜札《^$|!«、巾科;】Hmr 垢抽出:-:;:A Pniu.i电丸比血則可由下丈靈Hi 电干世之挺”\n1>tc\■欢 S 版 AM :SS7»d]« a*趣廿说«蒔寸干与令肆弊甘皮说宅?1^«内的1!啟- ^ffS- 仔吐左电于古e 比侶用.电于雷敦忧朗爾宜丽tit 业切可电子SBrtl ; |0J"A )荃luc和IH1I-1C 匝raw* ffH 丰元干RE 疋需菇忡.调■t 史机《祐遵課韦拒警年忖.屯1/理目塔£目萋*1:獎 «州吳•時现fz )A1地a5. ieje4- cm3374A1维时值出存LiH•II 电吗谢 a話g第豐樹jt ;軸范趾7、自動調諧9.匚2伺月g谓樂功能一览*C1I)口动调谯功昵a岌环积》吋佝歩*门知min隹丑环«蛊}:pg⑷:y »钮持冷裁迎»吋删萋*丁扛陶4«1〕答的用门劈数(«£进疔?1功设)£的功能・请歩怛下《的论崛* SH的选挥(1述调遇和伺«堆亘调6・。
安川电机驱动器SGM系列设计维护手册
3.2
伺服单元内部的框图 - - - - - - - - - - - - - - - - - 3-6
x
3.4 输入与输出信号 - - - - - - - - - - - - - - - - - - 3-14
3.4.1 3.4.2 3.4.3 3.4.4 输入与输出信号的连接 - - - 连接器 (CN1) 的端子排列一览 输入与输出信号名称及其功能 接口电路 - - - - - - - - - - 3-14 - 3-止 ( 绝对不能做的事 )。例如 “严禁烟火”时,则表示为
。
表示强制 ( 必须要做的事 )。例如 “接地”时,则表示为
。
关于危险的标识,ISO 规格与 JIS 规格有所不同。
ISO 规格 JIS 规格
本手册中使用的是 ISO 规格的标识。 产品的警告标牌有 ISO 规格和 JIS 规格两种。请同等对待两种标牌。
3.5 与编码器的配线 - - - - - - - - - - - - - - - - - - 3-21
3.5.1 与编码器 (CN2) 的连接及来自伺服单元 (CM) 的输出信号的处理 - - 3-21 3.5.2 编码器用连接器 (CN2) 的端子排列和型号 - - - - - - - - - - - - 3-22
4.2 试运行时的补充事项 - - - - - - - - - - - - - - - - 4-11
4.2.1 带制动器的伺服电机的使用 - - - - - - - - - - - - - - - - - - 4-11 4.2.2 用上级装置进行的位置控制 - - - - - - - - - - - - - - - - - - 4-12
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
䣠୷拓创䕚 / τʇУପۜ說
ν؈ᙆజ೯͛dᜑͪኜึІਗᜑͪᙆజ˾f
YASKAWA
Ⴞп̌ঐ
Դ͜٫參數
̌ঐ
Fn000
ᙆజ履歷ᜑͪ
Fn001
ί ON-LINE Іਗሜಂගʘண֛
Fn002
JOG Ъᅼό
Fn003
䣠୷拓创䕚 / τʇУପۜ說
Fn000 ᙆజᔳᜑͪ
ᜑͪᚨਗኜʫ௰ܝٙ 10 ࡈᙆజٙ狀رf
Fn001 Іਗሜፓٙண立
Ӕ֛Іਗሜፓٙዚኜٙf
Fn002 ʂਗ˙όЪ
ίӚϞ̮ܸ令ٙઋرɨЪУ৵༺f
ሜཥ流ʝชኜ(ཥ流ˀ㉿)f
Fn010 ᇁண立
更౬ 0 讀ᄳၾ 1 ਬ讀ͪڌf
Fn011 ৵༺ۨͪڌ
ᜑͪᚨਗኜ̙༶Ъٙ৵༺f
Fn012 ழᠧͪڌ͉و
YASKAWA
东莞拓创机电自动化有限公司 电话:0769-7816249/2065820 ୋ 13 ࠫd 13 ࠫ
Դ͜٫參數
ᜑͪʫ࢙
ఊЗ
Un000
৵༺ྼყᔷ
R/min
Un001
፩ɝ度ܸ令
R/min
Un002
ʫᔷॉܸ令
Un004
ૅᔷԉ 2
Deg
Un005
፩ɝৃ္ൖ
---
Un006
፩̈ৃ္ൖ
---
Un007
፩ɝܸ令এላ度
R/min
Un008 Un009
ࢨࠇ數ኜ࠽ 累ጐࠋ༱率
ਗঐՓਗཥڜኜהऊ൬̻ٙѩཥ力
Un00C ፩ɝܸ令এላࠇ數ኜ
ᚨਗኜટաՑܸٙ令এላ數͜ЗໄછՓ˙όf
Un00D ˀ㉿এላࠇ數ኜ
ᚨਗኜટաՑٙˀ㉿এላ數f
YASKAWA
东莞拓创机电自动化有限公司 电话:0769-7816249/2065820 ୋ 16 ࠫd 16 ࠫ
1)SGMAH У৵༺
利৷̋度ٙ৷ᔷॉ-࿕ˢ ͜Ⴠʈุ(IP55) ᕘ֛度 3000rpmd௰৷度 5000rpm ˴ࠅ͜jཥɿༀৣd৷֛ʂ切dϓۨዚdPCB ˆ
2)SGMPH У৵༺
ቇ͜惡劣ٙʈЪᐑྤ(IP67) ڗ度௰ٙƲŘУ৵༺ ᕘ֛度 3000rpmd௰৷度 5000rpm ˴ࠅ͜j̒ኬᏐ͜dۜ̍ༀdዚኜɛ
䣠୷拓创䕚 / τʇУପۜ說
YASKAWA
൩eટᇞ
东莞拓创机电自动化有限公司 电话:0769-7816249/2065820 ୋ 5 ࠫd 5 ࠫ
䣠୷拓创䕚 / τʇУପۜ說
ࡡᓃరҬᅼό
Fn004
௪͜參數
Fn005
Դ͜٫參數ڋಂʷ
Fn006
ᙆజ履歷ৰ
Fn007
ਗ਼ І ON-LINE І ਗ ሜ ፓ ٙ ࿕ ˢ 例 ༟ 料 ᄳ ɝ
EEPROM াኳ
Fn008
ഒ࿁ᇜᇁኜεϣᔷਗࠠணʿᇜᇁኜᙆజࠠண
Fn009
類ˢ度eᔷॉܸ令Іਗሜ
Fn00A
度ܸ令Ꮅ˓ਗሜ
SGDM ᚨਗኜ
400W אЭ 400W ٙ 100V א200V ఊۨ 800W ձ 1500W ٙᚨਗኜҷༀ̙ܝԴ͜ఊ 200V ཥ๕f 500W א৷ 500W ٙ 200V 3
ᚨਗኜۨ說
ᚨਗኜᔊʧ
东莞拓创机电自动化有限公司 电话:0769-7816249/2065820 ୋ 4 ࠫd 4 ࠫ
YASKAWA
东莞拓创机电自动化有限公司 电话:0769-7816249/2065820 ୋ 6 ࠫd 6 ࠫ
䣠୷拓创䕚 / τʇУପۜ說
YASKAWA
东莞拓创机电自动化有限公司 电话:0769-7816249/2065820 ୋ 7 ࠫd 7 ࠫ
䣠୷拓创䕚 / τʇУପۜ說
ໍeԴ͜٫參數
參數݊͜數ЗόᎷπЪᚨਗኜٙ數ኽٙή˙f 參數Ϟࣛ၈Ъண֛א੬數f 參數͟ο͎ Pn ৎ᎘dν Pn001f 參數Ϟ兩၇類ۨj 1. ፯ό參數 2. ሜό參數 ፯ό參數ᅼᏝ數Зόකᗫf
䣠୷拓创䕚 / τʇУପۜ說
YASKAWA
东莞拓创机电自动化有限公司 电话:0769-7816249/2065820 ୋ 8 ࠫd 8 ࠫ
䣠୷拓创䕚 / τʇУପۜ說
䣠୷拓创䕚 / τʇУପۜ說
YASKAWA
ପۜतʧୗ ఠeટᇞ ൩eЪኜ說
參eԴ͜٫參數 ͼe݂ღરৰ
东莞拓创机电自动化有限公司 电话:0769-7816249/2065820 ୋ 1 ࠫd 1 ࠫ
Fn00B 類ˢᔷॉܸ令ٙ˓ਗࢨሜ
ሜ零ᔷॉٙᏀ࠽(͜ऊৰ量)f
Fn00C 類ˢ္ൖኜ፩̈ٙ˓ਗ零ሜ
ሜ類ˢ፩̈ٙ˥f
Fn00D 類ˢ္ൖኜ፩̈ٙ˓ਗո֛Փਗኜሜ
ሜ類ˢ፩֛̈ٙˢ例f
Fn00E ৵༺ཥ流ᏨڦݟٙІਗࢨሜ
ሜཥ流ʝชኜ(ཥ流ˀ㉿)
Fn00F ৵༺ཥ流Ꮸڦݟٙ˓ਗࢨሜ
Reference units
č
Un00A
Ϋ͛ࠋ༱率
č
Un00B
DB ཥڜٙཥ力ऊঃ
č
Un00C
፩ɝܸ令এላࠇ數ኜ
---
Un00D
Ϋ㉿এላࠇ數ኜ
---
东莞拓创机电自动化有限公司 电话:0769-7816249/2065820 ୋ 14 ࠫd 14 ࠫ
ሜ零度ٙᏀ࠽(͜ऊৰ量)f
YASKAWA
东莞拓创机电自动化有限公司 电话:0769-7816249/2065820 ୋ 12 ࠫd 12 ࠫ
䣠୷拓创䕚 / τʇУପۜ說
˴ࠅ͜jCNC ʈЪ͎ዚd̒ኬᏐ͜dෂᇞd̍ༀdᔷ౬ዚ ᕘ֛度 1500rpmd௰৷度 3000rpm
4)SGMSH У৵༺
利৷̋度ٙ৷ᔷॉ-࿕ˢ ቇ͜惡劣ٙʈЪᐑྤ(IP67) ᕘ֛度 3000rpmd௰৷度 5000rpm ˴ࠅ͜jႡዚdϓۨዚdPCB ˆd৷ʈЪ͎ዚ
Fn003 రҬࡡᓃ˙ό
రҬᇜᇁኜࡡএላএЗໄf ͍ࣧ͜৵༺ၾዚኜ
Fn005 參數ண֛ٙ௰ڋʷ
ҪהϞٙ參數ண֛މӻ୕̈ᅀ࠽f
Fn006 ᙆజᔳ數ኽऊৰ
ऊৰᙆజᔳ數ኽ ᜑͪί Fn000 ٙ數ኽf
Fn007 ІਗሜፓʕՑٙ࿕力ˢ率
Ҫ量Ցٙٙ࿕力ˢ率ᄳɝাኳf
Fn008 ഒ࿁࠽༆ᇁኜٙεᔷ數ձᙆజٙࠠอண֛
䣠୷拓创䕚 / τʇУପۜ說
YASKAWA
ఠeପۜतʧୗ
ƲŘ˾ڌ了У৵༺ձᚨਗኜҦஔٙφ၌ ৷̌ঐd৷ሯ量dʃጐ݊ƲŘϓ̌ʘᗫᒟ ίƲŘପۜʕdϞ̬၇৵༺ձɓ၇ᚨਗኜfՉࣸ 30w Ց 15kw ৵༺ᔊʧ
䣠୷拓创䕚 / τʇУପۜ說
͜˒္ൖኜܵᚃᔳ
͜˒္ൖኜ͟ο͎ Un ৎ᎘dν Un001f 度dᔷॉձ狀رٙ數࠽f ͜˒္ൖኜ數ኽϞ兩၇類ۨj 數ο္ൖኜ္݊͜ൖ數࠽ٙf 例ν度dᔷॉձЗໄ異੬ഃf Bit 狀္رൖኜ݊͜кᓙӊɓࡈᓃٙකᗫ狀رf
৵༺ۨ說
YASKAWA
东莞拓创机电自动化有限公司 电话:0769-7816249/2065820 ୋ 3 ࠫd 3 ࠫ
䣠୷拓创䕚 / τʇУପۜ說
YASKAWA
YASKAWA
YASKAWA
ܲ MODE/SET ᒟ̙፯狀رᜑͪeႾп̌ঐe參數ண֛e္ൖᅼόഃ̬၇ᅼό
狀رᜑͪ݊ஷཥܝٙӻ୕ண立ᜑͪf 狀رᜑͪͪڌ了ᚨਗኜٙ狀˟৾(رd༶行ձ൴行)f
东莞拓创机电自动化有限公司 电话:0769-7816249/2065820 ୋ 10 ࠫd 10 ࠫ
Un007 ፩ɝܸ令এላ度
এә፩ɝܸה令ٙ度(ၾএላ᎖率ϓˢ例)
Un008 Ⴌࢨࠇ數ኜ࠽(ܸ令ఊЗ)
ܸ令এላն令ձྼყ৵༺ЗໄගٙႬࢨ
Un009 累ጐࠋஃ度(ᕘ֛ᔷॉٙč)
ί 10 ϣృᐑʕٙϞࣖᔷॉ
Un00A Ύ͛ࠋஃ度(௰৷Ύ͛ཥ力ٙč)
Ύ͛ཥהڜऊঃ̻ٙѩཥ力
Un00B ͟ DB ཥڜኜהऊ൬ٙཥ力(௰৷ཥ力ٙč)
YASKAWA
䣠୷拓创䕚 / τʇУପۜ說
Un000 ྼყ৵༺度
Un001 ፩ɝ度ܸ令
̥͜度છՓ˙όf
Un002 ʫᔷॉܸ令(ᕘ֛ᔷॉٙč)
У৵ྼყɪ፩̈ٙᔷॉf
Un003 ࡡᓃৎٙএላ數
Un004 ࡡᓃৎٙཥंԉ度
ࠠอண֛ഒ࿁࠽༆ᇁኜٙᙆజ˸ʿҪεᔷࠇ數ኜண މ0f *Դ͜ഒ࿁࠽༆ᇁኜ ண֛ഒ࿁࠽༆ᇁኜٙεᔷࠢޢ Ҫεᔷࠢٙண֛ᄳɝ Pn205 (щˏึۆৎᙆజ )f
Fn009 類ˢ度eᔷॉܸ令ٙІਗࢨሜ
Іਗண֛零度ձ零ᔷॉٙᏀ࠽(͜ऊৰ量)
Fn00A 類ˢ度ܸ令ٙ˓ਗࢨሜ
Fn00B
ᔷॉܸ令Ꮅ˓ਗሜ
Fn00C
類ˢ္ൖኜ፩̈ٙ˓ਗ零ሜ
Fn00D
類ˢ္ൖኜ፩̈ٙ˓ਗᄣूሜ
Fn00E
৵༺ཥ流ਈৃٙІਗᎵሜ
Fn00F
৵༺ཥ流ਈৃٙ˓ਗᎵሜ