盛群单片机集成开发环境使用简介
盛群单片机简介

物联网
作为物联网节点,实现数据采 集和远程控制。
智能仪表
用于能源计量、环境监测等。
竞争优势
丰富的产品线
盛群单片机提供多种型 号和封装,满足不同应
用需求。
技术支持完善
盛群单片机提供全面的 技术支持,包括技术咨 询、样品试用、开发工
具等。
价格竞争力
盛群单片机在保证性能 和质量的前提下,尽量 降低成本,提供有竞争
盛群单片机简介
汇报人: 202X-01-01
目录
• 盛群单片机概述 • 盛群单片机技术规格 • 盛群单片机开发环境 • 盛群单片机应用案例 • 盛群单片机未来展望
01
盛群单片机概述
产品特点
高性能
盛群单片机采用先进的制程技术,具有 高速的运算能力和低功耗特性。
易开发
盛群单片机提供完善的开发工具和文 档,支持多种编程语言,如C、汇编
智能农业
盛群单片机可用于农业智能化管理,如节水灌溉、温室环境监测等 。
05
盛群单片机未来展望
技术发展趋势
更高性能
01
随着半导体工艺的进步,盛群单片机将具备更高的处理速度、
更低的功耗和更小的体积。
人工智能集成
02
盛群单片机将集成更多的人工智能算法和功能,实现更智能化
的控制和数据处理。
无线连接
03
盛群单片机将支持更高速、更稳定的无线连接,方便设备之间
智能家居
01
02
03
智能照明
盛群单片机可控制LED灯 的亮度和颜色,实现智能 调光和场景切换。
智能安防
通过盛群单片机,可实现 门禁、监控、报警等功能 的集成,提高家庭安全系 数。
智能环境监测
单片机多级通信系统的软硬件设计及集成
单片机多级通信系统的软硬件设计及集成一、简介单片机多级通信系统是一种基于单片机的多级通信系统。
通过使用单片机作为主要控制器,结合合适的硬件设计和软件编程,实现多级设备之间的有效通信。
本文将详细介绍单片机多级通信系统的软硬件设计及集成内容。
二、硬件设计1. 硬件选型在设计单片机多级通信系统时,首先需要选择适合的硬件组件。
合适的硬件组件包括单片机、传感器、通信模块等。
根据具体需求,选择性能强大、功耗低、稳定可靠的单片机芯片,同时选择适合的传感器和通信模块。
2. 电路设计根据系统需求和硬件选型,进行电路设计。
该设计包括主控单片机电路、传感器连接电路、通信模块接口电路等部分。
确保电路设计合理,满足系统性能和可靠性要求。
3. PCB设计基于电路设计,进行PCB设计。
通过专业的PCB设计软件,将电路原理图转化为实际的PCB布局。
PCB设计过程中应考虑信号线长度、布线规划、阻抗匹配等因素,确保PCB布局合理和信号完整性。
三、软件设计1. 系统架构设计在软件设计阶段,首先需要进行系统架构设计。
根据多级通信系统的需求,确定系统的基本功能和模块划分。
常见的系统模块包括数据采集模块、数据处理模块、通信模块等。
2. 程序编写根据系统架构设计,逐个编写各模块的程序。
数据采集模块用于从传感器中获取数据,数据处理模块用于对采集到的数据进行处理,通信模块用于实现不同设备之间的通信。
编写的程序应考虑系统的实时性和可靠性。
3. 软件调试与优化完成程序编写后,进行软件调试。
通过测试和调试验证软件的正确性和稳定性。
对存在的问题进行优化和修复,确保系统的性能和稳定性。
四、集成1. 硬件与软件的集成将硬件和软件进行集成。
将编写好的程序烧录到单片机中,连接硬件组件,并保证其正常工作。
2. 系统调试对集成后的系统进行调试。
通过测试验证系统的功能完整性和稳定性。
对存在的问题进行排查和修复。
3. 性能测试与优化对系统进行性能测试,包括数据传输速度、系统响应时间等指标。
盛群单片机初赛报告
基于盛群HT46系列单片机的智能电热毯控制器重庆邮电大学通信与信息工程学院参赛队员刘绍全李震海曾涛吕卓识指导教师贺利芳2010 年03 月10 日作品创意书一、摘要智能电热毯控制系统是结合现在社会家庭和学校宿舍电热毯的使用中出现的弊端而设计的,作为用单片机控制的智能产品之一。
本文将介绍新型智能电热毯控制系统的原理,特色,以及市场需求和发展前景。
此系统是基于HOLTEK MCU控制多模块的方式进行控制。
硬件部分由键盘输入模块,LED 指示灯,红外发送模块,红外接收模块,温度检测和单片机接收处理外围电路组成。
具体方法:一盛群单片机为核心,由按键盘向单片机输入指令,通过对温度的监测再由单片机做出相应的响应来控制电热毯的开和关。
二、前言现在家庭以及学校使用的电热毯功能简单,不完善,时常出现电热毯着火等危险。
除人们常见的火灾外,电热毯对人体健康还有隐藏的危害,根据医学研究使用电热毯持续性散热,一方面使人体皮肤水分被蒸发干燥;另一方面是由于热源体本身对皮肤的刺激,使某些人的皮肤过敏;再则电热毯产生的电磁辐射也会带来危害。
所以我们在原有电热毯的基础上增加了一些实际可行的功能,用户可以通过按键对电热毯进行控制。
作品主要功能:温度监测,用户自我设定所需的加热温度,限制加热温度,高温警报;加热时间累计显示,漏电保护;特有的健康模式选择能保护用户免受上述电热毯对人体健康的隐藏危害。
本作品的创新之一是于用户可以自己设定适合自己的加热温度,摆脱传统的“高温,保温,低温”加热模式;之二是用户可以通过本控制器知道当前电热毯温度,方便用户设定适合自己的电热毯温度;之三是本控制器可以在用户睡觉时未关电热毯情况下自动在一定时间后关掉电热毯,这样可以避免用户触电危险和电热毯产生的电磁辐射带来的危害等一系列被人们忽视的隐藏危害。
三、工作原理智能电热毯控制器以HT46RU232为核心,通过与温度传感器DS1802,可控硅BTA06,74s151等外围元件的协同作用达到温度实时监控,用户自我设定加热温度,高温报警,漏电保护等功能,具体原理如下:温度实时显示功能:本功能通过DS1802采集电热毯的温度,传送给HT46RU232进行处理,并在LCD上实时显示出来;设定加热温度功能:用户通过键盘输入所适合自己的加热温度,并且在LCD上显示用户改变设定的温度变化,设定好后由HT46RU232存储设定的温度值,并根据DS1820采集的温度数据与用户设定的温度值进行对比,进而来调整电热毯的加热功率,当加热达到用户设定的温度值,可自动切换到保温状态,但温度低于用户设定加热的温度时又增加电热毯的加热功率。
单片机的软件开发工具与环境介绍
单片机的软件开发工具与环境介绍单片机是指集成在单个芯片上的微型计算机系统。
它具备较小的体积、低功耗、低成本以及较强的功能等特点,被广泛应用于各个领域。
在单片机的开发过程中,选择合适的软件开发工具和环境非常关键。
本文将介绍几种常用的单片机软件开发工具与环境。
一、Keil μVisionKeil μVision是一款由Keil Software公司推出的嵌入式系统开发工具。
它是一套集成开发环境(IDE),包含了编译器、调试器、仿真器等功能模块,可以实现单片机程序的编写、编译以及调试。
KeilμVision支持多种芯片系列,如STMicroelectronics的STM32系列、NXP的LPC系列等。
其可视化界面友好,功能强大,被广泛应用于单片机软件开发领域。
二、IAR Embedded WorkbenchIAR Embedded Workbench是由IAR Systems推出的单片机开发工具。
它提供了完整的软件开发流程,包括编写、编译、调试和优化等环节。
IAR Embedded Workbench支持多种单片机系列,如Texas Instruments的MSP430系列、Renesas的RL78系列等。
该工具具有较高的代码生成效率和卓越的调试功能,可以帮助开发者提高开发效率和代码质量。
三、MPLAB X IDEMPLAB X IDE是由Microchip公司开发的一款集成开发环境。
它主要用于开发与Microchip单片机相关的应用程序。
MPLAB X IDE支持多种编程语言,如C、C++以及汇编语言。
该工具提供了丰富的调试功能和模拟器功能,并能够与硬件调试器(如PICkit)结合使用,使得开发者可以更加方便地进行单片机程序的开发和调试。
四、Arduino IDEArduino IDE是一款面向Arduino单片机的开发工具。
Arduino是一种开源的电子原型平台,广泛应用于各个领域的快速原型开发。
盛群 HT45R36 C R-F型八位 OTP 单片机 说明书
C/R-F 型八位OTP 单片机盛群知识产权政策专利权盛群半导体公司在全球各地区已核准和申请中之专利权至少有160件以上,享有绝对之合法权益。
与盛群公司MCU 或其它产品有关的专利权并未被同意授权使用,任何经由不当手段侵害盛群公司专利权之公司、组织或个人,盛群将采取一切可能的法律行动,遏止侵权者不当的侵权行为,并追讨盛群公司因侵权行为所受之损失、或侵权者所得之不法利益。
商标商标权权盛群之名称和标识、Holtek 标识、HT-IDE 、HT-ICE 、Marvel Speech 、 Music Micro 、 Adlib Micro 、 Magic V oice 、 Green Dialer 、 PagerPro 、 Q-V oice 、 Turbo V oice 、 EasyV oice 和 HandyWriter 都是盛群半导体公司在台湾地区和其它国家的注册商标。
著作权Copyright © 2007 by HOLTEK SEMICONDUCTOR INC.规格书中所出现的信息在出版当时相信是正确的,然而盛群对于规格内容的使用不负责任。
文中提到的应用其目的仅仅是用来做说明,盛群不保证或不表示这些应用没有更深入的修改就能适用,也不推荐它的产品使用在会由于故障或其它原因可能会对人身造成危害的地方。
盛群产品不授权使用于救生、维生器件或系统中做为关键器件。
盛群拥有不事先通知而修改产品的权利,对于最新的信息,请参考我们的网址; 技术相关信息· 工具信息· FAQs· 应用范例特性• 工作电压:f SYS=4MHz:2.2V~5.5Vf SYS=8MHz:3.3V~5.5V• 25个双向输入/输出口• 2个与输入/输出口共用引脚的外部中断输入• 8位可编程定时/计数器,具有溢出中断和7级预分频器• 外部RC振荡转换电路• 内置晶体和RC振荡电路• 看门狗定时器• 16通道电容/电阻型传感器输入• 2048×14程序存储器ROM • 120×8数据存储器RAM• HALT和唤醒功能可降低功耗• 在V DD=5V,系统频率为8MHz时,指令周期为0.5µs• 指令执行时间为1或2个指令周期• 查表指令,表格内容字长14位• 4层硬件堆栈• 位操作指令• 63条指令• 低电压复位功能• 44/52-pin QFP封装概述HT45R36是8位高性能精简指令集单片机,专门为经济型多输入输出控制的产品而设计。
盛群单片机HT32入门

HT32 Training Course
Advantages
RISC Processor Core Thumb-2 Technology Low Power Modes
Nested Vectored Interrupt Controller (NVIC) ARM-V7 32-bit CPU with 1.25 DMIPS/MHz Optimal blend of 16/32-bit instructions Multiple power domains Low latency, low jitter interrupt response Interrupt service routines in pure C H/W Divider (2-12 Cycles) & 1-Cycle Multiplier
(if their handler cannot be executed)
HT32 Training Course
HT32 Training Course
• Cortex-M3 Processor
• Nested Vectored Interrupt Controller (NVIC) • Optional Memory Protection Unit (MPU)
(Not available in HT3 Exception
Privilege Level
Privileged or Unprivileged Always Privilege
Stack
MSP or PSP MSP
11
Holtek Semiconductor Inc.
Memory Model – Memory Map
APB1
USART0 SPI0 GPIO
单片机的开发环境keil的描述

一、概述单片机是一种集成了微处理器、存储器和输入/输出功能的集成电路,它在嵌入式系统中扮演着重要角色。
为了进行单片机的开发和编程,开发环境的选择和配置至关重要。
其中,Keil是一款专业的单片机开发环境,本文将对其进行描述和详细介绍。
二、Keil开发环境概述1. Keil开发环境简介Keil是一款由Keil Software公司开发的嵌入式系统开发工具,主要用于单片机的软件开发、调试和编程。
它提供了一整套完整的软件开发工具,包括C编译器、调试器、仿真器等,能够帮助开发者轻松进行单片机的开发工作。
2. Keil支持的单片机类型Keil支持包括STC、ATMEL、TI、NXP、Renesas等多种常见的单片机型号,覆盖了市面上绝大部分主流的单片机芯片。
3. Keil的特点Keil具有良好的易用性和稳定性,它可以在Windows操作系统下运行,并支持多种编程语言,包括C、C++、汇编语言等。
它还提供了丰富的编程和调试工具,能够帮助开发者高效地进行单片机程序的开发和调试工作。
三、Keil开发环境的安装和配置1. Keil软件的下载和安装开发者可以从Keil冠方全球信息站上下载Keil软件的安装包,然后按照安装向导逐步进行安装。
安装过程相对简单,一般不会遇到太大的问题。
2. Keil开发环境的配置安装完成后,开发者需要对Keil开发环境进行一些基本的配置,以确保其能够正常运行。
需要对工程文件、编译器设置、仿真器设置等进行配置,以满足具体的项目需求。
四、Keil开发环境的基本使用1. 新建项目在Keil中,开发者可以通过简单的操作新建一个项目,然后将需要的源码文件或者库文件添加到项目中。
2. 编写程序开发者可以在Keil中使用C、C++或者汇编语言编写单片机程序,支持的语言种类丰富,为开发者提供了更多的选择。
3. 编译和调试Keil提供了强大的编译器和调试工具,开发者可以利用这些工具对程序进行编译和调试,并对程序的运行状态进行实时监控和分析。
HT-IDE3000 说明书

HT-IDE3000使用手册二○○六年七月Copyright © 2006 by HOL TEK SEMICONDUCTOR INC.本使用手册版权为盛群半导体股份有限公司所有,非经盛群半导体股份有限公司书面授权同意,不得通过任何形式复制、储存或传输。
注意使用指南中所出现的信息在出版当时相信是正确的,然而盛群对于说明书的使用不负任何责任。
文中提到的应用目的仅仅是用来做说明,盛群不保证或表示这些没有进一步修改的应用将是适当的,也不推荐它的产品使用在会由于故障或其它原因可能会对人身造成危害的地方。
盛群产品不授权使用于救生、维生器件或系统中做为关键器件。
盛群拥有不事先通知而修改产品的权利。
对于最新的信息,请参考我们的网址i目录第一部份 集成开发环境 (1)第一章 概要与安装 (3)HT-IDE 集成开发环境 (3)盛群单片机仿真器(HT-ICE) (5)HT-ICE 接口卡 (5)OTP 烧录器 (5)OTP 适配卡 (5)系统配置 (6)安装 (7)系统需求 (7)硬件安装 (7)软件安装 (8)第二章 快速快速开始开始 (13)步骤一:建立一个新项目 (13)步骤二:将源程序文件加到项目中 (13)步骤三:编译项目 (13)步骤四:烧录OTP 单片机 (14)步骤五:传送程序与掩膜选项单至Holtek (14)第三章 菜单 − 文件/编辑/视图/工具/选项 (15)启动HT-IDE3000系统 (15)文件菜单 (18)编辑菜单 (19)视图菜单 (20)Mask Option (21)Diagnose (22)Writer (23)Library Manager (23)V oice/VROM Editor (24)V oice/Download (24)LCD Simulator (25)Virtual Peripheral Manager (25)Data EEPROM Editor (25)选项菜单 (26)Project Command (26)Debug Command (27)Directories Command (29)Editor Command (30)Color Command (30)Font Command (30)第四章菜单−项目 (31)建立新项目 (31)打开和关闭项目 (32)管理项目的源文件 (33)将源程序文件加到项目中 (33)从项目中删除源程序文件 (34)向上或向下移动源程序文件的位置 (34)建立项目的任务文件 (34)建立项目的任务文件 (35)重建项目的任务文件 (35)编译 (35)编译程序 (35)Print Option Table Command (36)Generate Demo File (.DMO) Command (36)第五章菜单−除错 (37)复位HT-IDE3000系统 (38)从HT-IDE3000复位 (39)从应用电路板复位 (39)应用程序的硬件仿真 (40)硬件仿真应用程序 (40)停止硬件仿真应用程序 (40)执行应用程序到指定的程序行 (40)直接跳跃到应用程序中的某一行 (41)单步执行 (41)ii断点特性 (43)断点项目的说明 (43)如何设定断点 (45)跟踪应用程序 (47)跟踪的初步设定 (47)停止跟踪 (49)跟踪的启动与停止 (49)跟踪记录的格式 (52)除错器的命令模式 (54)进入命令模式与离开命令模式 (54)命令模式所支持的功能 (54)Log文件格式 (61)HT-COMMAND错误信息 (62)第六章菜单−窗口 (63)窗口菜单命令 (64)第七章软件仿真 (69)开始仿真 (70)第八章OTP烧录 (71)简介 (71)安装 (72)烧录器转接座 (72)使用HT-HandyWriter烧写OTP单片机 (73)系统信息 (81)第二部份开发语言与工具 (83)第九章汇编语言和编译器 (85)常用符号 (85)语句语法 (86)名称 (86)操作项 (86)操作数项 (86)注释 (86)汇编伪指令 (87)条件汇编伪指令 (87)文件控制伪指令 (88)程序伪指令 (90)数据定义伪指令 (94)iii汇编语言指令 (100)名称 (100)助记符 (100)操作数,运算子和表示式 (100)其它 (103)前置引用 (103)局部标号 (103)汇编语言保留字 (104)编译器选项 (105)编译列表文件格式 (105)源程序列表 (105)编译总结 (106)其它 (106)第十章盛群C语言 (109)简介 (109)C语言的程序结构 (110)语句 (110)注释 (110)标识符 (111)保留字 (111)数据类型 (111)数据类型与大小 (111)宣告 (112)常量 (113)整型常量 (113)字符型常量 (114)字符串常量 (114)枚举常量 (114)运算符 (115)算术运算符 (115)关系运算符 (115)等式运算符 (115)逻辑运算符 (116)位运算符 (116)复合赋值运算符 (116)递增和递减运算符 (117)条件运算符 (117)逗号运算符 (117)运算符的优先权与结合性 (118)类型转换 (119)程序流程控制 (120)函数 (124)古典形式 (124)iv指针与数组 (125)指针 (125)数组 (125)结构体与共用体(Structures and Unions) (126)前置处理伪指令 (127)盛群C语言的扩充功能与限制 (132)关键字 (132)存储器区块(memory bank) (132)位数据类型 (133)内嵌式汇编语言 (133)中断 (134)变量 (135)静态变量 (135)常量 (135)函数 (135)数组 (136)常量 (136)指针 (136)初始值 (136)乘法/除法/模 (137)内建函数 (137)堆栈 (138)第十一章混合语言 (139)Little Endian (139)函数与参数的命名规则 (140)全局变量 (140)局部变量 (140)函数 (141)函数的参数 (142)参数的传递 (142)返回值 (142)寄存器内容的保存 (142)在C程序调用汇编语言函数 (143)在汇编程序调用C函数 (144)使用汇编语言撰写ISR函数 (146)第十二章连接器 (147)连接器的作用 (147)连接器的选项 (147)函数库文件 (147)程序段地址 (148)生成地址映射文件 (148)地址映射文件 (148)连接器的任务文件与除错文件 (149)vvi第十三章 函数库管理器 (153)函数库管理器的功能..............................................................................153 设定函数库文件.. (153)生成新的函数库文件......................................................................155 往函数库文件中添加程序模块......................................................155 从函数库文件中删除程序模块......................................................155 从函数库文件中取得程序模块并生成目标文件..........................156 目标模块的信息..............................................................................156 第十第十四章四章 LCD 仿真器.. (157)简介..........................................................................................................157 LCD 面板配置文件 (157)面板文件的文件名与项目的关系..................................................158 选择HT-LCDS.................................................................................158 LCD 面板图形文件.................................................................................159 建立LCD 面板配置文件 (160)建立面板的配置结构......................................................................160 选择图形并设定位置......................................................................161 加入新的图形..................................................................................161 删除图形..........................................................................................162 改变图形..........................................................................................162 改变图形位置..................................................................................162 如何加入用户定义的矩阵..............................................................163 使用Panel Editor 定义图形............................................................164 使用批处理文件将图形加入面板..................................................165 选择LCD 面板的颜色....................................................................165 为VFD 面板设定颜色样式............................................................166 LCD 仿真. (167)停止仿真..........................................................................................167 第十五章 虚拟外围设备管理器虚拟外围设备管理器((VPM ). (169)简介..........................................................................................................169 VPM 窗口................................................................................................170 VPM 菜单 (171)文件菜单..........................................................................................171 功能菜单..........................................................................................172 VPM 外围组件. (174)LED..................................................................................................174 Button/Switch...................................................................................175 Seven Segment Display....................................................................176 快速开始的范例.. (178)霹雳灯 (178)vii附录A 编译器使用的保留字 (183)汇编语言保留字......................................................................................183 指令集......................................................................................................184 附录B 编译器的错误信息....................................................................187 附录C 连接器的错误连接器的错误信息信息....................................................................191 附录D 函数库的错误信息....................................................................197 附录E 盛群C 编译器的错误信息. (199)错误码......................................................................................................199 警告码......................................................................................................204 致命码 (205)viii第一部份集成开发环境123第一章概要与安装 在简化应用程序的开发过程方面,单片机支持工具的重要性和有效性是不可低估的。
盛群半导体 HT48RA0-2 HT48RA0-1 遥控型单片机 说明书
遥控型单片机 使用手册
二○○五年三月
Copyright 2005 by HOLTEK SEMICONDUCTOR INC
本使用手册版权为盛群半导体股份有限公司所有,非经盛群半导体股份有限公司书面授权同意,不得通过任 何形式复制、储存或传输。
ቤተ መጻሕፍቲ ባይዱ 目录
目录
第一部份 单片机概论 .................................................................. 1
第一章 硬件结构........................................................................................ 3 简介.............................................................................................................. 3 特性.............................................................................................................. 4 技术特性 ..............................................................................................4 内核特性 ..............................................................................................4 周边特性 ..............................................................................................5 选择表.......................................................................................................... 6 系统框线图.................................................................................................. 7 引脚分配...................................................................................................... 8 引脚说明...................................................................................................... 8 极限参数...................................................................................................... 9 直流电气特性............................................................................................ 10 交流电气特性............................................................................................ 11 系统结构.................................................................................................... 12 时序和流水线结构(Pipelining) .........................................................12 程序计数器 ........................................................................................13 堆栈 ....................................................................................................16 算术及逻辑单元 – ALU ...................................................................17 程序存储器................................................................................................ 18 结构 ....................................................................................................18 特殊向量 ............................................................................................19 多 bank 管理 ......................................................................................19 查表 ....................................................................................................23 数据存储器................................................................................................ 28 结构 ....................................................................................................28 通用数据存储器 ................................................................................28 专用数据存储器 ................................................................................29
keilc51集成开发环境的使用
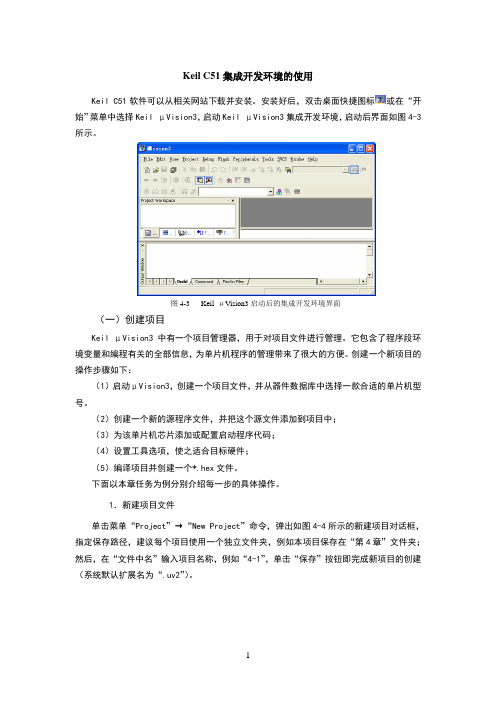
Keil C51集成开发环境的使用Keil C51软件可以从相关网站下载并安装。
安装好后,双击桌面快捷图标或在“开始”菜单中选择Keil μVision3,启动Keil μVision3集成开发环境,启动后界面如图4-3所示。
图4-3 Keil μVision3启动后的集成开发环境界面(一)创建项目Keil μVision3中有一个项目管理器,用于对项目文件进行管理。
它包含了程序段环境变量和编程有关的全部信息,为单片机程序的管理带来了很大的方便。
创建一个新项目的操作步骤如下:(1)启动μVision3,创建一个项目文件,并从器件数据库中选择一款合适的单片机型号。
(2)创建一个新的源程序文件,并把这个源文件添加到项目中;(3)为该单片机芯片添加或配置启动程序代码;(4)设置工具选项,使之适合目标硬件;(5)编译项目并创建一个*.hex文件。
下面以本章任务为例分别介绍每一步的具体操作。
1.新建项目文件单击菜单“Project”→“New Project”命令,弹出如图4-4所示的新建项目对话框,指定保存路径,建议每个项目使用一个独立文件夹,例如本项目保存在“第4章”文件夹;然后,在“文件中名”输入项目名称,例如“4-1”,单击“保存”按钮即完成新项目的创建(系统默认扩展名为“.uv2”)。
输入文件图4-4 新建项目对话框此时弹出选择单片机的型号对话框,如图4-5所示,展开Atmel系列单片机,选择“AT89C51”,单击“确定”按钮完成设备的选择。
图4-5 选择单片机的型号对话框单片机型号选择结束后,在μVision3工作界面左边的项目管理器中新增加了一个“Target 1”目标1文件夹,如图4-6所示。
图4-6 项目管理器中新增“Target 1”对话框2.新建源程序文件单击菜单“File”→“New”命令,就可以创建一个源程序文件。
该命令会打开一个空的编辑器窗口,默认名为“Text 1”,输入如下源程序:/******************************************************************名称:流水灯控制模块名:AT89C51,74LS373功能描述:当开关打开时,LED自上而下依次点亮;当开关闭合时,LED从下向上依次点亮。
凌阳16位单片机第6章 集成开发环境IDE

第6章 集成开发环境IDE6.1 综述本章将详细介绍µ’nSP™集成开发环境。
µ’nSP™ 集成开发环境集程序的编辑、编译、链接、调试以及仿真等功能为一体。
具有友好的交互界面、下拉菜单、快捷键和快速访问命令列表等,使编程、调试工作方便且高效。
此外,它的软件仿真功能可以在不连接仿真板的情况下模拟硬件的各项功能来调试程序。
图6.1µ’nSP™ IDE 桌面IDE的开发界面如图6.1所示。
本章将介绍µ’nSP™开发环境的菜单、窗口界面以及项目的操作等,使有兴趣者对开发环境有一个总体了解,并能够动手实践。
6.2 菜单集成环境的主菜单在标题栏的下面。
菜单栏中的菜单命令提供了开发、调试和保存应用程序所需要的工具。
µ’nSP™ IDE 菜单栏共有七项,即文件(File)、编辑(Edit)、视图(View)、项目(Project)、编辑(Build)、工具(Tools)和帮助(Help)。
每个菜单项含有若干个菜单命令,执行不同的操作,用鼠标单击某个菜单项,即可打开该菜单,然后用鼠标单击菜单中的某一条就能执行相应的菜单命令。
菜单中的命令分为两种类型,一类是可以直接执行的命令,这类命令的后面没有任何信息(例如保存项目);另一类在命令名后面带省略号(例如打开项目),需要通过打开对话框来执行。
在用鼠标单击一条命令后,屏幕上将显示一个对话框,利用对话框可以执行各种有关的操作。
在有些命令的后面还带有其它信息,例如:打开项目Ctrl + O,其中Ctrl + O叫做“热键”。
在菜单中,热键列在相应的菜单命令之后,与菜单命令具有相同的作用。
使用热键方式,不必打开菜单就能执行相应的菜单命令。
例如:按Ctrl + O,可以立即执行“打开项目”命令。
注意:只有部分菜单命令能通过热键执行。
下面介绍菜单栏各项的内容及作用。
6.2.1 文件(File)文件的下拉菜单内容及功能如表6.1:表6.1 文件的下拉菜单内容及功能内容作用热键新建(New) 新建项目和各种文件Ctrl + N打开(Open) 打开项目或各种文件Ctrl + O关闭(Close) 关闭文件窗口用来关闭当前的项目,装入新的项目。
单片机的开发环境

单片机的开发环境单片机(Microcontroller)是一种嵌入式系统中常用的芯片,它集成了处理器核心、存储器、输入输出接口和其他外设功能,具备独立运行程序的能力。
在进行单片机的开发工作之前,我们需要搭建一个合适的开发环境,以便进行程序编写、调试和烧录等工作。
本文将介绍单片机开发环境的搭建过程。
一、选择开发工具在搭建单片机开发环境之前,首先需要选择一款合适的开发工具。
常用的单片机开发工具有Keil μVision、IAR Embedded Workbench、CCS等。
这些工具提供了友好的图形化界面,支持多种单片机型号,具备强大的编译、仿真、调试和烧录功能。
根据实际需求和个人喜好,选择一款适合自己的开发工具。
二、准备硬件设备在搭建单片机开发环境之前,还需要准备一些硬件设备。
通常情况下,我们需要一台个人电脑、一块单片机开发板、一个编程器以及一些连接线材料。
个人电脑用于安装和运行开发工具,开发板用于烧录和运行程序,编程器用于将程序下载到开发板中。
根据所选的单片机型号和开发工具的要求,选择相应的硬件设备。
三、安装开发工具选择好开发工具后,我们需要将其安装到个人电脑中。
通常情况下,开发工具的安装过程比较简单,只需双击安装包并按照提示进行操作即可完成安装。
安装完成后,我们需要进行一些基本的配置,如选择工作目录、设置编译选项等。
四、连接开发板开发工具安装完成后,我们需要将开发板和个人电脑连接起来。
首先,将编程器与个人电脑相连,通常情况下,编程器会通过USB接口与个人电脑相连接。
然后,将开发板与编程器相连,通常情况下,开发板会通过排针接口与编程器相连接。
连接完成后,我们还需要检查连接是否正常,确保开发板能够被正确识别。
五、编写程序连接完成后,我们可以开始编写程序了。
打开开发工具,创建一个新的工程,选择所使用的单片机型号和编译选项。
然后,在集成开发环境中编写程序代码,可以使用C语言或者汇编语言来编写。
编写完成后,进行编译,以检查程序是否存在语法错误或者逻辑错误。
龙芯 1x 嵌入式集成开发环境 1.0 使用说明书
龙芯1x嵌入式集成开发环境 1.0使用说明书苏州市天晟软件科技有限公司2021年4月目 录1、简介 (5)1.1 主要特点 (6)1.2 目录结构 (6)1.3 文档约定 (7)1.3.1 文件扩展名 (7)1.3.2 指定文件名 (7)1.3.3 头文件 (7)1.4 项目开发过程 (7)2、初次使用 (8)2.1 语言设置 (8)2.2 工作区目录 (9)2.3 GNU 工具链 (9)3、用户界面 (12)3.1 菜单栏 (12)3.2 工具栏 (14)3.3 编辑面板 (14)3.3.1项目视图 (15)3.3.2 代码解析 (17)3.3.3 文本编辑器 (18)3.3.4 消息窗口 (19)3.4 调试面板 (20)3.4.1 断点列表 (21)3.4.2 CPU 寄存器 (21)3.4.3 观察值 (22)3.4.4 汇编代码 (22)3.4.5 函数调用回溯 (22)3.4.6 GDB 交互命令 (22)3.5 状态栏 (23)4、项目管理 (24)4.1 新建项目向导 (24)4.1.1 第一步项目基本信息 (24)4.1.2 第二步设置Mcu、工具链和操作系统 (25)4.1.3 第三步实时操作系统选项 (26)4.1.4 第四步确认并完成向导 (29)4.1.5 新建项目示例 (30)4.2 基本操作 (30)4.2.1 打开项目 (30)4.2.2 保存项目 (31)4.2.3 关闭项目 (31)4.2.4 项目另存为 (31)4.2.5 成批添加文件 (32)4.2.6 成批移除文件 (33)4.3 项目属性 (34)5、文档管理 (37)5.1 文件操作 (37)5.1.1 新建源代码文件 (37)5.1.2 新建头文件 (37)5.1.3 文件重命名 (38)5.1.4 文件移动 (38)5.1.5 文件删除 (39)5.2 文件夹操作 (39)5.2.1 新建文件夹 (39)5.2.2 重命名文件夹 (39)5.2.3 移动文件夹 (40)5.2.4 删除文件夹 (40)5.3 Drag & Drop (40)6、文本编辑器 (41)6.1 编辑器选项 (41)6.1.1 常用 (41)6.1.2 字体 (42)6.1.3 颜色 (42)6.1.4 代码解析 (43)6.1.5 符号补全 (43)6.1.6 自动保存 (44)6.2 基本操作 (44)6.2.1 编辑 (44)6.2.2 查找 (44)6.2.3 替换 (45)6.2.4 在文件中查找 (46)6.3 其它操作 (47)6.3.1 打开头文件/文件夹 (47)6.3.2 定位语句定义原型 (47)6.3.3 代码解析项跳转 (48)6.4 插入代码向导 (49)6.4.1 插入RTOS 任务代码 (49)6.4.2 插入SPI/I2C驱动代码 (50)6.5 信息提示 (52)7、项目编译 (53)7.1 编译选项 (53)7.1.1 MIPS & BSP Options (54)7.1.2 GNU C Compiler - C 编译器 (54)7.1.3 GNU Assembler - 汇编语言编译器 (58)7.1.4 GNU C++ Compiler - C++ 编译器 (58)7.1.5 GNU C Linker - C 链接器 (58)7.1.6 软浮点算术库 (60)7.2 开始编译 (61)7.2.1 编译成功 (61)7.2.2 编译失败 (62)7.3 项目清理 (62)8、项目调试 (63)8.1 调试选项 (63)8.1.1 主要项 (63)8.1.2 调试器 (64)8.1.3 启动项 (65)8.1.4 源代码 (66)8.2 调试断点 (66)8.2.1 在编辑器中设置断点 (66)8.2.2 断点列表 (67)8.3 开始调试 (67)8.3.1 代码下载 (67)8.3.2 单步运行 (68)8.3.3 连续运行 (69)8.3.4 停止调试 (69)8.3.5 观察值 (69)8.3.6 函数调用回溯 (70)9、实用工具 (71)9.1 NOR Flash 编程 (71)9.2 NAND Flash 编程 (72)9.3 硬件设计助手 (73)9.3.1 龙芯 1B 芯片 (74)9.3.2 龙芯 1C 芯片 (75)10、系统安装 (76)10.1 运行环境 (76)10.1.1 安装MSYS 1.0 (76)10.1.2 安装MSYS2 (76)10.2 安装LoongIDE (76)10.2.1 运行安装向导 (77)10.2.2 LxLink驱动 (77)10.3 GNU 工具链 (78)10.3.1 SDE Lite for MIPS工具链 (78)10.3.2 RTEMS GCC for MIPS工具链 (78)10.4 注意事项 (78)1、简介缩写LS1x DTK:Embedded DTK for LS1x 龙芯1x嵌入式开发工具LoongIDE: Embedded IDE for LS1x 龙芯1x嵌入式集成开发环境LS1x DTK用于龙芯1x芯片的嵌入式开发解决方案,包括创建、构建以及调试用户应用项目,完美支持龙芯1x芯片的工业级应用的开发。
单片机原理及实用技术 第10章 集成开发环境
和 D evice。 属 性 页 设 置 后 有 描 述
A lt+F 7
第10章 集成开发环境
5. Build(编译) Build下拉菜单界面如图10.6所示,下拉菜单的内容及功 能如表10.5所示。
第10章 集成开发环境 图10.6 Build下拉菜单界面
第10章 集成开发环境 表10.5 Build的下拉菜单内容及功能
图10.8 Help下拉菜单界面
第10章 集成开发环境 表10.7 Help的下拉菜单内容及功能
内 容
作 用
H e lpT o p ic s(帮 助 主 题 ) 介 绍 ID E 环 境
A b o u t ID E (关 于 ID E )
ID E 的 版 本 号 开 发 公 司 所 占 空 间
第10章 集成开发环境
第10章 集成开发环境
第10章 集成开发环境
10.1 调试菜单 10.2 工具栏 10.3 窗口使用 10.4 项目管理 10.5 代码剖视器
第10章 集成开发环境
10.1 调 试 菜 单
在桌面点击IDE图标,进入IDE开发环境。在标题栏下面, 是集成开发环境的主菜单,菜单栏中的命令提供了开发调试和 保存应用程序的工具。μ ’nSP™ IDE 菜单栏共有七项:File(文 件)、Edit(编辑)、View(视图)、Project(项目)、Build(编译)、 Tools(工具)和Help(帮助),如图10.1所示。
打开最近使用的 10 个项目,主要是方便开发者在最短的 时间内找到并打开所需的项目
退出开发环境
Ctrl + P
第10章 集成开发环境 2. Edit(编辑) Edit下拉菜单界面如图10.3所示,下拉菜单的内容及功能如 表10.2所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
盛群单片机集成开发环境使用简介重庆理工大学电子学院万文略一、建立项目(工程)工程->新建Project Location Step1对话单击集成开发环境的菜单,弹出框NextProject按钮,弹出及编译工具后按输入项目名称,确定保存路径,选择CPU Location-Step2对话框。
.NextProject出,弹序程,按按钮用机单盛编语用择选使C言写群片应Location-Step3对话框。
NextWarning对话框。
按钮,弹出输入程序文件名,按.初次使用盛群单片机开发环境及e-ICE时,单击QS10001SV100.DOC文件名,打开文件查看e-ice 的使用限制,若已熟悉可以直接按OK按钮进行项目配置。
利用配置文件设置CPU工作在特定的模式下,主要有:系统电压设置系统时钟频率设置ICE复位功能选择芯片封装选择。
配置选项的项目繁多,初学者难以理解,这时可以按以下给出的设置套用即可。
.选择系统电压为5V选择系统工作频率,这里设置的时钟频率最好与目标板使用的时钟频率一致,时钟频率值只8. ,6,4,N=2,其中24/N Mhz能等于这里选择SYSTEM,无需再外界复位电路。
可以选择与目标板使用的芯片一致的封装。
.CPU的RC振荡器工作电压电压选择。
这里选择高速时钟振荡源分别是HXT:外部晶体振荡ERC:外部RC振荡HIRC:内部高频RC振荡RC振荡器电路简单,但振荡频率不精确、不稳定。
对时钟频率要求高的应用建议选择外部晶体振荡。
.内部低频RC振荡源选择LIRC:内部低频振荡LXT:外部低频晶体振荡低频晶体振荡指的是32.67Khz的晶体。
看门狗时钟频率选择fSUB内部振荡器(LXT或LIRC)指令周期频率fSYS/4.内部RC振荡器振荡频率选择禁能/低电压复位使能低电压检测阈值电压选择串行接口模块使能SPI片选信号使能/禁能禁能/数据写入冲突标志位使能SPI.看门狗定时器功能使能/禁能条指令1条指令或2清除看门狗指令方式选择:PB0做复位引脚或IO引脚选择I2c接口去噪声选项Nodebounce 无去噪声功能2 system clock debounce 4 system clock debounce工程选项设置盛群单片机开发工具简介仿真器盛群单片机的仿真器由MEV和DEV组成,仿真器不具备通用性,仿真HT66系列单片机时应配套使用M1001C MEV板和D1003C DEV板。
仿真版M1001CDEV.单片机仿真HT66F50板用于D1003C DEV.MEV、DEV叠加到一起构成仿真器仿真器的引脚定义HT66F50 / HT68F50 DEV PND1003A在IDE的帮助文件里可以查看仿真器的引脚定义。
HT66F50的IO口HT66F50有多种封装形式,最少有13个IO口,最多有50个IO口。
每种型号的CPU的IO口分布见下表IO口的复用引脚复用在单片机设计中普遍使用,这使得一个MPU引脚可以分时具备多个功能。
使得MCU在应用上具备更好的灵活性。
用户可以根据需要选择和配置引脚功能。
PA口的功能PA口除了可以做一般双向IO口(PA0~PA7)外还可以有以下功能:模拟输入引脚(AN0~AN7)PA0模拟比较器0的输出引脚PA1 ETM的捕获输入或比较输出引脚PA2模拟比较器0的同相输入C0+,或作STM的外部时钟输入引脚TCK0PA3模拟比较器0的反相输入C0-,或作外部中断输入引脚INT0。
PA4外部中断输入引脚INT1,或作ETM的外部时钟输入引脚TCK1。
PA5模拟比较器1的输出引脚,或作SPI接口的SDO线。
PA6SPI接口的SDI线,或作I2C接口的SDA线。
PA7SPI接口的SCK线,或作I2C接口的SCL线。
口内部结构IO)(Ioh口都是推挽输出,当工作在每个IO5V电压下时可以输出Source Current1. 。
,Iol=80mAIol)20mA。
整块芯片驱动总电流Ioh=80mA-7.4mA,Sink Current(口为弱上拉功能。
可以选择IO2. 口支持掉电唤醒输入。
3.PA 有较好的抗干扰能力。
输入加施密特触发器,使MCU4.IO IO口的控制寄存器是。
PxF,G,C,D,E,B3每个IO口有个控制寄存器,即Px,PxC,PxPU,这里x=A,口的IOIOIO口的数据寄存器,写这个寄存器控制对口进行输出控制,读这个寄存器得到口的上拉状态。
PxPU控制IOPxC是IO口的控制寄存器,控制IO口的方向;状态;口控制寄存器,PxPxC口的方向寄存器控制PxPxCPxCPxC7 PxC6 PxC5 PxC4 PxC3 PxC2 PxC0 PxC0Bit0Bit3Bit7Bit1Bit6Bit5Bit2Bit4盛群单片机的IO口的输入输出方向由PxC寄存器控制:当Bit=0时,对应的Px口IO引脚为输出状态当Bit=1时,对应的Px口IO引脚为输入状态Px,Px口的数据寄存器Px寄存器是IO口的数据寄存器,当IO口为输入模式时,读Px寄存器可以得到当前IO口的状态,当IO口为输出模式时,写Px寄存器改变IO口的状态。
口的上拉控制寄存器Px,PxPU.口处于弱的上拉状态。
PxPU寄存器控制IO 时无上拉状态。
对应位为1时使能弱上拉,为0时,3V5V电压下时,上拉电阻的值在10K~50K之间,当单片机工作在当单片机工作在之间。
上拉电阻的值在20K~100K 语言控制盛群单片机的寄存器CHT66F50这里以PA口为例,查阅如何在C程序中访问盛群单片机的特殊功能寄存器呢,位字长的无符号数寄存器的地址为0x1a,0x1b。
每个寄存器都是8器件手册,得知PA,PAC (因为每一位都有特定的功能,最高位不是符号位)。
在程序中定义:@0x1a; unsigned char _pa@0x1b;unsigned char _pac表示PA寄存器,_pac表示盛群单片机的C语言用@表示一个物理地址,这样符号_pa PAC寄存器。
口为输入口,则程序为让PA_pac=0xff;变量,程序为 PA口的状态到tmp读tmp=_pa;以上是对整个IO口同时进行读写操作,有时我们常常要单独写寄存器的某一位。
盛群单片机的C语法为#define _pa0 _1a_0_1a是寄存器的字节地址,_0为寄存器的位地址。
执行程序_pa0=0;的结果是PA口的第0位为低,其他位的状态不变。
例:检测PA口的第5位是否为高电平#define _pa5 _1a_5if(_pa5==1)…处理PA5为高else…处理PA5为低以上简单地介绍了盛群单片机的特殊表示方式,读者只需要模仿就可以了,这些特殊的语法在其他品牌的MCU开发中是不适用的。
需要注意的是#define语句要在C程序的最开始的部分进行定义。
关于其他寄存器的定义请参阅HT66F50.h文件。
例一:PA口控制8流水灯。
本例用PA口驱动8个LED,每次只点亮一个发光二极管,口控制流水灯,如图所示。
PA硬件设计:选用.时时发光二极管点亮,反偏或正向偏置电流为0mA发光二极管正向偏置电流在5~10mA 发光二极管熄灭。
发光二极管的正5VIO口电压接近5V电源电压下,当IO口为高电平时,工作在MCU 欧限流电阻时,发光二极管的导通工作电流大约为4701.1V~1.2V。
因此当接向导通电压约口的寄存器位IO8mA左右。
图中所有的发光二极管的阴极接地,又称作共阴极解法。
这时口的位对应得引脚输出高电平,发光二极管点亮。
也可以采用共阳极的解法,这时IO为1 0的位对应的引脚输出低电平,发光二极管点亮。
具体电路请读者自己思考。
的寄存器位为程序设计思路 MCU 进行初始化1.首先要对口的工作模式为输出口,PAPA口的功能为IO对本例来说要IO口进行初始化。
即选择 IO口时要关闭其他复用功能。
模式。
另外,由于PA口为多功能复用口,作一般建立控制模型2.以便于程序实建立控制模型的目的是将具体应用功能要求用数学模型或数字逻辑表示,现和处理。
建模是程序设计的关键步骤。
时发光二极管点亮。
每个发光二极管点亮后1控制,IO口输出为本例为最简单的MCU 一段时间后后熄灭,再依次点亮下一位发光二极管。
用数字表示为PA口PA7 PA6 PA5 PA4 PA3 PA2 PA1 PA0 寄存器1 0 0 0 0 01H 0 第1次 0 00 1 0 02H 0 次第2 0 0 0 00 04H 0 次第3 0 0 0 0 1 00 0 1 0 0 08H 0 次4第 0 0110H次5第通过观察表中MCU输出数据的变化规律,可以得出每次控制状态发生改变时,下一时刻的PA口数据的状态是前一时刻状态的2倍,或下一次的状态是前一时刻的左移。
共有8个发光二极管,所以要循环8次。
实现上述算法时可以采用向左移位或乘2的两种方法。
以向左移位的方法为好,因为左移只需要MPU执行一条机器指令即可,而用乘2的方法则需要MCU执行更多的机器指令,对没有乘法指令的MCU而言,需要调用一个乘法子程序来实现乘法的功能,即使对有乘法指令的MCU,其执行乘法指令的速度一般要慢于执行移位指令。
需要注意的是,C语言没有循环移位运算符,PA是个8为字长的寄存器,当PA=0x80时,再次移位或乘2后PA=0。
这时全部的LED都熄灭了。
所以程序中要加以处理,处理的方法是,若PA=0,则令PA=0x01;3.编写程序#include HT66F50.h //包含HT66F50头文件,这个文件定义了MCU所有的寄存器#define LedPort _pa // pa 端口#define LedPortCtrl _pac // pa 控制端口#pragma vector isr_4 @ 0x4#pragma vector isr_8 @ 0x8#pragma vector isr_c @ 0xc//ISR for safequardvoid isr_4(){} // externalvoid isr_8(){} // timer/eventvoid isr_c(){}这里将中断服务程序定义为空函数。
若有中断发生,程序不作处理直接返回,若没有这些空函数,当发生中断时,MCU的程序计数器会崩溃。
//initialize registers forvoid safeguard_init(){_pac = 0xff;_pbc = 0xff;_pcc = 0xff;_pdc = 0xff;}上电复位时,所有的IO口为输入状态,保证系统安全void main(void) // 主函数{unsigned char k ;safeguard_init();_papu=0xff; //PA口弱上拉LedPortCtrl = 0 ; // 设定 pa 端口为输出LedPort = 0xff ; // 熄灭所有 LED_cp0c=0; //不使用比较器0_cp1c=0; //不使用比较器1转换器AD不使用 _acerl=0; //_tmpc0=0; //不使用定时器0的复用引脚 _tmpc1=0; //不使用定时器1的复用引脚 k=1;while(1) //程序为一个无限循环{LedPort = k;_delay(25000) ; // 延迟 500 毫秒 (ms)_delay(25000) ;_delay(25000) ;_delay(25000) ;_delay(25000) ;k=k*2;if(k==0)k=1;}}未完待续。