垂直起降 固定翼 无人机 设计 研发方案
垂直起降无人机总体设计
西北工业大学硕士学位论文
II
ABSTRACT
In the past decades, Unmanned Aerial Vehicle (UAV) has been developed rapidly. It possesses many specialities that manned airplanes do not have, for instance, high ratio of performance vs. cost, no need of risking man’s life, so that UAV is being paid more and more attention to by aero-engineers across the world. However, most UAVs are not satisfying in terms of withdraw, which limits their applications under many circumstances. Precise withdraw with light overload is the trend of future UAVs. In this thesis, various kinds of withdraw of UAVs are discussed, with the result of a Vertical Take-off and Landing (VTOL) UAV project being brought forward. And the conceptual design of VTOL, including type selection, overall layout and decision of major parameters are also discussed in depth. Eventually, primary layout parameters and three-view of layout of the designed VTOL UAV are given, and various performances are estimated too. The results are satisfactory.
垂直起降固定翼无人机研究报告

垂直起降固定翼无人机研究报告垂直起降固定翼无人机(Vertical Takeoff and Landing, VTOL)是一种具有垂直起降能力的固定翼无人机。
相比传统的固定翼无人机,垂直起降固定翼无人机具有更高的灵活性和多样性。
本文将对垂直起降固定翼无人机的研究进行探讨。
首先,垂直起降固定翼无人机的研究在军事领域有着广泛的应用。
由于其独特的起降方式,垂直起降固定翼无人机能够在狭小的空间内进行起降,比如在舰船上或者城市中心。
这使得垂直起降固定翼无人机成为一种重要的情报侦察和目标打击工具。
其次,垂直起降固定翼无人机的研究也在民用领域得到广泛应用。
例如,在无人货运方面,垂直起降固定翼无人机能够在城市中心等人口密集区域进行货运,减少了交通压力和环境污染。
此外,垂直起降固定翼无人机还可用于搜救、农业作业和航拍等领域,提供了更多的选择和解决方案。
垂直起降固定翼无人机的研究面临着一些挑战。
首先,由于垂直起降需要额外的动力和控制系统,这增加了无人机的复杂性和成本。
其次,垂直起降固定翼无人机在空中飞行时需要保持平衡,这对控制系统的精度和稳定性提出了更高的要求。
此外,垂直起降固定翼无人机的垂直起降能力通常意味着减少了飞行时间和有效载荷。
为了解决这些挑战,研究人员采取了许多措施。
首先,他们不断改进垂直起降系统,减少额外动力系统所占用的空间和重量。
其次,他们通过改进飞行控制算法和传感器技术来提高垂直起降固定翼无人机的飞行稳定性和精度。
此外,他们还在电池和动力系统上进行了大量研究,以提高垂直起降固定翼无人机的续航时间和有效载荷。
总而言之,垂直起降固定翼无人机是一种具有广泛应用潜力的无人机。
无论是在军事还是民用领域,垂直起降固定翼无人机都能够提供更高的灵活性和多样性。
尽管研究人员仍然面临一些挑战,但通过持续的研究和创新,垂直起降固定翼无人机有望在未来取得更多的突破。
垂直起降无人机总体设计
垂直起降无人机总体设计垂直起降无人机(Vertical Take-Off and Landing, VTOL)是一种特殊的无人机设计,它可以在起飞和着陆时像直升机一样垂直起降,并在巡航时像传统的固定翼飞机一样进行水平飞行。
VTOL无人机因其灵活性和多功能性而被广泛应用于军事、民用和商业领域。
在垂直起降无人机的总体设计中,需要考虑以下几个关键方面:1.飞行模式转换策略:垂直起降无人机需要在起飞、着陆和巡航时切换不同的飞行模式。
为了实现平稳的模式转换,需要设计一个可靠的自动化控制系统,该系统可以根据飞行任务和环境条件自主切换和控制飞行模式。
2.结构设计:垂直起降无人机的结构需要兼顾垂直起降和水平飞行的要求。
通常使用电动垂直推进器或涡轮发动机提供垂直起降的动力,同时使用翼面和固定翼来提供水平飞行时的升力和稳定性。
为了减轻重量并提高飞行效率,可以采用轻质材料和先进的制造技术。
3.传感器和导航系统:垂直起降无人机需要配备高精度的导航系统和多种传感器,例如全球定位系统(GPS)、惯性导航系统(INS)、气压计、雷达和光学传感器等。
这些传感器和导航系统可以提供飞行姿态、位置和环境信息,以支持飞行控制、导航和避障功能。
4.电力系统:由于垂直起降无人机需要在垂直和水平飞行时提供不同的动力需求,因此需要设计一个高效的电力系统。
电池和燃料电池是常见的动力选择,可以使用蓄电池在垂直起降时提供高功率输出,而在水平飞行时则可以通过燃料电池提供长时间的续航能力。
5.通信和数据链路:垂直起降无人机通常需要与地面控制站进行远程通信,并传输飞行数据和图像。
因此,需要设计一个可靠的通信系统和数据链路,以确保飞行过程中的实时数据传输和命令控制。
综上所述,垂直起降无人机的总体设计需要考虑飞行模式转换策略、结构设计、传感器和导航系统、电力系统以及通信和数据链路。
通过合理的设计和集成,垂直起降无人机可以实现多功能的飞行任务,广泛应用于各个领域。
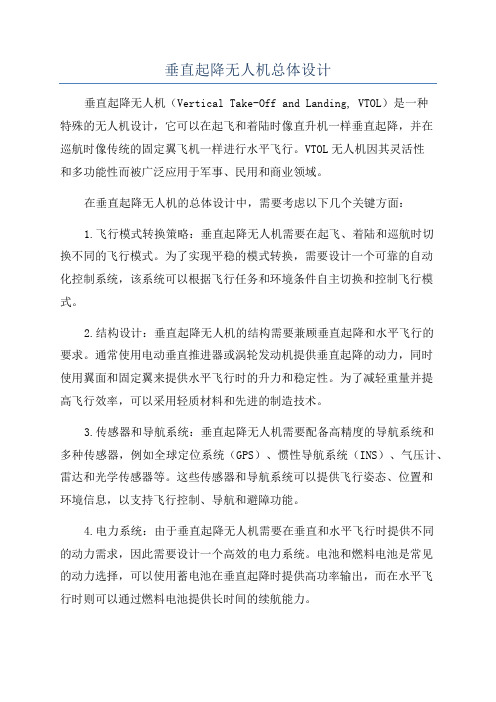
垂直起降固定翼无人机的翼尖垂尾设计分析
第10卷第5期2019年10月航空工程进展A D V A N C E S I N A E R O N A U T I C A LS C I E N C E A N DE N G I N E E R I N GV o l .10N o .5O c t .2019收稿日期:2018-11-12; 修回日期:2019-03-27通信作者:张飞,1178241047@q q.c o m 引用格式:张飞,王云,孙一方,等.垂直起降固定翼无人机的翼尖垂尾设计分析[J ].航空工程进展,2019,10(5):628-633,663.Z h a n g F e i ,W a n g Y u n ,S u nY i f a n g ,e t a l .D e s i g na n a l y s i s o fw i n g t i p v e r t i c a l t a i l o f t h ev e r t i c a l t a k e o f f a n d l a n d i n g f i x e d -w i n g U A V [J ].A d v a n c e s i nA e r o n a u t i c a l S c i e n c e a n dE n g i n e e r i n g,2019,10(5):628-633,663.(i nC h i n e s e )文章编号:1674-8190(2019)05-628-06垂直起降固定翼无人机的翼尖垂尾设计分析张飞,王云,孙一方,谭锟(南昌航空大学飞行器工程学院,南昌 330063)摘 要:垂直起降固定翼无人机兼具固定翼飞机速度快㊁航程远和多旋翼无人机垂直起降㊁可悬停作业的优点,研究其翼尖垂尾对整机气动特性的影响具有重要意义㊂垂直起降固定翼无人机采用翼尖下垂尾的设计可以在充当垂尾使用的同时兼具翼尖小翼和起落架的作用㊂对比下垂尾㊁上垂尾㊁翼梢端板和常规布局四种翼尖设计,采用L B M -L E S 算法㊁壁面自适应局部涡粘大涡模拟湍流模型对四种设计的气动特性进行仿真模拟分析㊂结果表明:翼尖下垂尾在平飞状态时比其他三种设计气动效率更高,在垂直起降或悬停状态时,抗侧风稳定性更好㊂关键词:无人机;垂直起降固定翼;翼尖垂尾;气动特性中图分类号:V 275+.2 文献标识码:AD O I :10.16615/j .c n k i .1674-8190.2019.05.007开放科学(资源服务)标识码(O S I D ):D e s i g nA n a l y s i s o fW i n g T i p Ve r t i c a l T a i l of t h eV e r t i c a l T a k e o f f a n dL a n d i ng F i x e d -w i n g UA V Z h a n g F e i ,W a n g Y u n ,S u nY i f a n g,T a nK u n (S c h o o l o fA i r c r a f tE n g i n e e r i n g ,N a n c h a n g H a n g k o n g U n i v e r s i t y ,N a n c h a n g 330063,C h i n a )A b s t r a c t :V e r t i c a l t a k e o f f a n d l a n d i n g (V T O L )f i x e d -w i n g U A Vh a s t h e a d v a n t a g e so f f a s t s p e e d ,l o n g r a n g e ,v e r t i c a l t a k e o f f a n d l a n d i n g a n d h o v e r i n g o p e r a t i o n o f f i x e d -w i n g U A V.I t i s o f g r e a t s i g n i f i c a n c e t o s t u d y t h e i n -f l u e n c e o f t h ev e r t i c a l t a i l o f i t sw i n g t i p o nt h ea e r o d y n a m i cc h a r a c t e r i s t i c so f t h ew h o l eU A V.T h ev e r t i c a l t a k e -o f f a n d l a n d i n g f i x e d -w i n g U A Vi s d e s i g n e dw i t ht h ed r o o p i n g t a i l o f t h ew i n g t i p t ob eu s e da s av e r t i c a l t a i lw i t hb o t hw i n g t i p s a n d l a n d i n gg e a r .F o u rw i n g t i p d e s i g n s o f t h e d r o o p i n g t a i l ,u p p e r v e r t i c a l t a i l ,w i n g t i p e n d p l a t e a n d c o n v e n t i o n a l l a y o u t a r e c o m p a r e d t h e a e r o d y n a m i c c h a r a c t e r i s t i c s o f t h e f o u r d e s i g n s a r e s i m u l a t e d a n da n a l y z e db y u s i n g L B M -L E Sa l g o r i t h ma n d t h ew a l l s e l f -a d a p t i v e l o c a l v o r t e xv i s c o u s l a r g e e d d y s i m u l a t i o n t u rb u l e nc em ode l .T h e a n a l y s i s r e s u l t s s h o wt h a t t h e d r o o p i n g t a i l of t h ew i ng t i p i sm o r e e f f i c i e n t th a n t h e o t h -e r t h r e e d e si g n s i n t h e l e v e l i n g f l i g h t s t a t e ;a n d i t s s t a b i l i t y a g a i n s t t h e c r o s s w i n d i s b e t t e r i n t h e v e r t i c a l t a k e o f f a n d l a n d i n g o r h o v e r i n g st a t e .K e y w o r d s :U A V ;V T O Lf i x e d -w i n g ;v e r t i c a l t a i l o fw i n g t i p ;a e r o d y n a m i c c h a r a c t e r i s t i c s0 引 言垂直起降固定翼无人机兼具固定翼飞机速度快㊁航程远和多旋翼无人机垂直起降㊁可悬停作业的优点,大幅扩展了无人机的应用范围㊂国外从20世纪60年代就开始有垂直起降方面的研究,但多为研究垂直起降总体方案类[1]㊂国内对垂直起降类无人机的研究也多为总体设计和控制策略类[2-5],而对垂直起降无人机翼尖设计类的研究[6-8]较少㊂垂直起降固定翼无人机为一种较为特殊的机型,传统的翼尖设计并不能完全适用于该类无人机㊂翼尖小翼能够降低无人机巡航状态的阻力[9]㊂常用的翼尖小翼主要有融合式翼梢小翼㊁涡扩散器㊁翼尖延伸以及 双叉弯刀”等多种构型[10]㊂因为垂直起降固定翼无人机具有独特的飞行模式,所以其翼尖小翼设计方式比较灵活㊂结合垂直起降固定翼无人机独特的飞行模式,本文提出四种翼尖垂尾的设计:翼尖下垂尾㊁翼尖上垂尾㊁翼梢端板㊁无翼尖垂尾的常规布局设计㊂为了解四种翼尖垂尾构型对中小型无人机总体性能的影响,本文结合某型垂直起降固定翼无人机工程设计案例对上述四种翼尖垂尾进行详细对比分析,确定适合该无人机的最优方案,同时可为类似无人机翼尖结构设计提供参考借鉴㊂1 某型垂直起降固定翼无人机总体及翼尖垂尾结构某型垂直起降固定翼无人机工程样机如图1所示,该无人机主要几何尺寸如表1所示㊂图1 某型垂直起降固定翼无人机工程样机F i g .1 A ne n g i n e e r i n gp r o t o t y pe of a v e r t i c a l t a k e -o f f a n d l a n d i ng f i x e d -w i n g U A V 表1 无人机主要几何参数T a b l e 1 T h em a i n g e o m e t r i c p a r a m e t e r s o fU A V几何参数数 值机身长度/m 1.7机翼翼展/m2.4起落架高度/m 0.3机翼根梢比2.2垂尾根梢比3.331/4弦线后掠角/(°)26 此无人机的垂直起降方案为主旋翼加三辅助涵道㊂主旋翼位于机身中部,三辅助涵道分别位于机头和两侧机翼处㊂主旋翼动力作为垂直起降状态和平飞状态时的主要动力㊂在垂直起降状态时,主旋翼动力用来克服重力;在平飞状态时,主旋翼动力倾转90°,用以克服平飞时无人机的阻力㊂三辅助涵道主要用来控制无人机在垂直起降状态时的机身平衡,在平飞状态时,不使用三辅助涵道㊂拟采用的翼尖垂尾结构可选方案有:下垂尾㊁上垂尾㊁翼梢端板和常规布局四种型式,如图2所示㊂(a )下垂尾 (b)上垂尾 (c )翼梢端板 (b)常规布局图2 四种翼尖设计F i g .2 F o u r k i n d s o fw i n g t i p d e s i gn 其中,下垂尾㊁上垂尾和常规布局模型的垂尾高度为0.3m ,垂尾面积和垂尾尺寸完全相同;翼梢端板模型的垂尾面积为其他三种模型的1.5倍㊂下垂尾和翼梢端板在作为垂尾使用的同时可充当起落架使用,故机身后部无需设置额外的起落架;上垂尾和常规布局的垂尾被设置在机身上方,故机身下方必须设置两根额外的后起落架㊂926第5期 张飞等:垂直起降固定翼无人机的翼尖垂尾设计分析2 求解方法和边界条件通过众多飞行实践可知,当来流马赫数M a ≤0.3时,空气压缩程度很小,可以忽略空气的可压缩性,将空气当作不可压流;当M a >0.3时,则需要考虑空气的可压缩性[11]㊂由于本文模型流速并未超过M a =0.3的临界值,采用理想不可压缩气体模型㊂同时为了便于计算,假设流动是定常且稳定的[12]㊂本文所采用的几何模型如图2所示,计算采用的湍流模型为壁面自适应局部涡粘大涡模拟模型,算法为格子-玻尔兹曼(L B M -L E S )算法[13]㊂采用L B M -L E S 方法的粒子分布网格如图3所示,网格密的区域表示粒子的尺度小㊂根据每一个时间步计算得到涡量,然后对粒子分布进行自适应动态加密(图3(b )),这样可在提高计算精度的同时没有过大地增加计算量㊂本文算例边界条件为:-x为速度入口边界条件,其余均为周期性边界条件㊂(a)局部粒子分布(b)自适应后粒子分布图3 L B M -L E S 方法的粒子分布F i g.3 P a r t i c l e d i s t r i b u t i o no fL B M -L E Sm e t h o d 3 四种翼尖垂尾设计性能分析3.1 计算方法的验证为了保证本文计算方法的可靠性,对无人机气动模型[14]计算其不同迎角下的升力值,并将计算结果与其实验数据进行对比㊂计算结果如图4所示㊂图4 计算数据与实验数据对比F i g .4 C o m pa r i s o no f t h e c a l c u l a t i o n d a t a a n de x pe r i m e n t a l d a t a 从图4可以看出:计算数据与实验数据结果吻合度良好,数据上存在的一些细微差别,主要是在仿真和试验条件下,由密度或粘性系数略有不同导致的,表明该计算方法正确可靠,可用于该无人机物理模型的气动特性研究㊂3.2 平飞状态气动模拟数据对比对此无人机在平飞状态下的气动模拟共计算来流速度为20m /s ,迎角α分别为-4°㊁-2°㊁0°㊁2°㊁4°㊁6°㊁8°㊁10°㊁12°㊁14°㊁16°的算例㊂其中,两副主旋翼呈共轴反桨状态,输出推力水平向后,转速皆为3000r /m i n㊂四种翼尖设计的升力系数(C L )㊁阻力系数(C D )以及升阻比(C L /C D )随迎角(α)的变化曲线如图5所示㊂(a)升力系数随迎角的变化曲线036航空工程进展 第10卷(b)阻力系数随迎角的变化曲线(c)升阻比随迎角的变化曲线图5 四种翼尖设计的升阻力系数及升阻比F i g .5 L i f t a n dd r a g c o e f f i c i e n t s a n d l i f t -d r a g r a t i o f o r f o u r k i n d s o fw i n g t i p de s i gn 从图5可以看出:在四种翼尖设计中,上垂尾设计的升力系数较大,常规布局设计的升力系数最小,但总体来说四种设计的升力系数差别不大,且四种翼尖设计在4°~6°迎角区间内飞行效率较高;下垂尾和翼梢端板在作为垂尾使用的同时还充当了起落架的作用,相比于上垂尾设计和常规布局设计少了两根额外的后起落架,因此下垂尾设计和翼梢端板设计的阻力系数较小,从而导致下垂尾设计和翼梢端板设计的升阻比相对较大㊂3.3 平飞状态三维流场对比无人机在巡航状态会产生一定的翼尖涡流和湍流㊂翼尖涡流的强度直接关系到无人机诱导阻力的大小[15],无人机巡航产生的湍流也会增大其阻力,因此有必要降低无人机在巡航状态时的翼尖涡流强度和湍流强度㊂四种翼尖设计在20m /s 来流4°迎角下的涡量云图如图6所示,湍流强度云图如图7所示㊂(a )下垂尾 (b)上垂尾 (c )翼梢端板 (b)常规布局图6 平飞状态四种翼尖设计涡量云图对比F i g .6 C o m p a r i s o no f v o r t i c i t y n e p h o gr a mo f f o u r w i n g t i p d e s i g n s i n l e v e l f l i gh t s t a t us (a )下垂尾 (b)上垂尾 (c )翼梢端板 (b)常规布局图7 平飞状态四种翼尖设计湍流强度云图对比F i g .7 C o m p a r i s o no f t u r b u l e n c e i n t e n s i t y n e p h o gr a mo f f o u rw i n g t i p d e s i g n s i n l e v e l f l i gh t s t a t u s 从图6~图7可以看出:(1)对整机阻力影响较大的为机身中部和机翼翼尖处㊂机身中部产生了大量的湍流和涡流,机翼翼尖处产生了大量的翼尖涡,而机翼翼尖处的湍流则相对很小㊂(2)机翼的翼尖处理起到了明显作用,相比之下,下垂尾设计㊁上垂尾设计㊁翼梢端板设计的翼尖涡流较小,但机身中部涡流面积较大;由于常规布136第5期 张飞等:垂直起降固定翼无人机的翼尖垂尾设计分析局的垂直尾翼设置在机身中部,有效地抑制了机身中部涡流的扩散,常规布局机身中部涡流面积较小,但翼尖涡流强度较大㊂(3)相比于下垂尾设计和翼梢端板设计,上垂尾设计和常规布局设计的机身下方多了两根起落架,因此在两根起落架处产生了明显的涡流和湍流㊂3.4 垂直起降状态气动模拟数据对比当无人机处于垂直起降状态时,对其四种翼尖设计在10m /s 侧风下进行气动模拟,机身侧向倾角分别为0°㊁4°㊁8°㊁12°㊁16°㊁20°㊂其中,两副主旋翼呈共轴反桨状态,输出推力垂直于机翼向下,转速皆为3500r /m i n㊂四种翼尖设计的侧面阻力F y 及相对于整机重心处的侧面重心力矩M z 如图8所示㊂(a )F y随机身倾角的变化(b)M z 随机身倾角的变化图8 四种翼尖设计的侧面阻力(F y )及侧面重心力矩(M z )随机身倾角的变化F i g .8 V a r i a t i o no f s i d e r e s i s t a n c e (F y )a n d s i d em o m e n t (M z )a c c o m p a n y wi t h i n c l i n a t i o n a n g l e o f f o u rw i n g t i p d e s i g n s 从图8可以看出:在相同倾角下侧面风速为10m /s 时,四种翼尖设计中下垂尾设计的侧面阻力和侧面力矩最小,翼梢端板设计的侧面阻力和侧面力矩最大;随着机身倾角增加下垂尾设计的侧面阻力F y 和侧面力矩M z 的增加幅度更小,上垂尾设计和翼梢端板设计的增加幅度更大;较小的侧面阻力和侧面力矩代表着机身更易于控制,因此下垂尾设计更具优势㊂3.5 垂直起降状态三维流场对比当无人机处于垂直起降状态时,四种翼尖设计在10m /s 侧风下,机身倾角为8°时的湍流强度云图如图9所示,涡量云图如图10所示㊂(a )下垂尾 (b)上垂尾 (c )翼梢端板 (b)常规布局图9 垂直起降状态四种翼尖设计湍流强度对比F i g .9 C o m p a r i s o no f t u r b u l e n c e i n t e n s i t y n e p h o gr a mo f f o u rw i n g t i p d e s i g n s i nv e r t i c a l t a k e o f f a n d l a n d i n g st a t us (a )下垂尾 (b)上垂尾 (c )翼梢端板 (b)常规布局图10 垂直起降状态四种翼尖设计涡量云图对比F i g .10 C o m p a r i s o no f v o r t i c i t y n e p h o gr a mo f f o u r w i n g t i p d e s i g n s i nv e r t i c a l t a k e o f f a n d l a n d i n g st a t u s 236航空工程进展 第10卷从图9~图10可以看出:(1)在四种翼尖设计中,上垂尾设计和翼梢端板设计产生的湍流和涡流相对较大,下垂尾设计和常规布局设计产生的湍流和涡流相对较小㊂(2)在垂直起降状态时,当侧面来流干扰机身时,机身需要倾斜一定角度来抗衡机身产生的阻力,且下垂尾设计相对其余三种翼尖设计侧面投影面积最小,故下垂尾设计产生的湍流和涡流也相对较小㊂且随着机身倾斜角度的增大,下垂尾设计相对其余三种翼尖设计的侧面投影面积越小,因而所造成的机身侧面阻力和侧面力矩也越小㊂4 结 论(1)在平飞状态时,四种翼尖设计中,下垂尾设计和翼梢端板设计在一定程度上抑制了翼尖涡流,同时兼顾了起落架整流,升阻比较高㊂(2)在垂直起降状态时,四种翼尖设计中,下垂尾设计和常规布局设计的侧面阻力和侧面力矩相对较小㊂综合平飞状态和垂直起降状态两种工况可以确定:在四种翼尖设计中,下垂尾设计是较为理想的布局设计㊂(3)无人机机身中部主旋翼处的流场比较复杂,有必要对其做进一步的优化设计㊂参考文献[1]T a n g J,H uY,S o n g B.Ad e t a i l e d a e r o d y n a m i c a n a l y s i s o ft h ec y c l o r o t o ru s i n g d y n a m i c m e s hi n C F D[R].A I A A-2014-0406,2014.[2]何小九,李彦彬,朱枫,等.国外垂直起降无人机发展现状及设计制造关键技术[J].飞航导弹,2016(6):22-27.H eX i a o j i u,L iY a n b i n,Z h uF e n g,e t a l.D e v e l o p m e n t s t a-t u s a n dd e s i g na n dm a n u f a c t u r ek e y t e c h n o l o g i e so f f o r e i g nV T O L U A V[J].A e r o d y n a m i c M i s s i l eJ o u r n a l,2016(6):22-27.(i nC h i n e s e)[3]张啸迟,万志强,章异嬴,等.旋翼固定翼复合式垂直起降飞行器概念设计研究[J].航空学报,2016,37(1):179-192.Z h a n g X i a o c h i,W a nZ h i q i a n g,Z h a n g Y i y i n g,e t a l.C o n-c e p t u a lde s i g n o fr o t a r y w i n g a n df i x e d w i ng c o m p o u n dV T O La i r c r a f t[J].A c t aA e r o n a u t i c ae tA s t r o n a u t i c aS i n i-c a,2016,37(1):179-192.(i nC h i n e s e)[4]王冠林,武哲.垂直起降无人机总体方案分析及控制策略综合研究[J].飞机设计,2006(3):25-30.W a n g G u a n l i n,W uZ h e.A n a l y s i s o f t h e o v e r a l l s c h e m e a n dc o m p r e h e n s i v e s t ud y o f c o n t r o l s t r a te g y of v e r t i c a l t a k e-o f fa n d l a n d i n g U A V[J].A i r c r a f tD e s i g n,2006(3):25-30.(i nC h i n e s e)[5]刘凯,叶赋晨.垂直起降飞行器的发展动态和趋势分析[J].航空工程进展,2015,6(2):127-138,159.L i uK a i,Y eF u c h e n.D e v e l o p m e n td y n a m i c sa n dt r e n da-n a l y s i so fv e r t i c a lt a k e-o f fa n dl a n d i n g a i r c r a f t[J].A d-v a n c e s i n A e r o n a u t i c a lS c i e n c ea n d E n g i n e e r i n g,2015,6(2):127-138,159.(i nC h i n e s e)[6]张飞.垂直起降固定翼无人机研究[D].南昌:南昌航空大学,2019.Z h a n g F e i.R e s e a r c ho nv e r t i c a l t a k e o f f a n dl a n d i n g f i x e d-w i n g U A V[D].N a n c h a n g:N a n c h a n g H a n g k o n g U n i v e r s i-t y,2019.(i nC h i n e s e)[7]李继广,陈欣,李震.考虑隐身约束的舰载飞翼无人机翼尖装置气动设计和分析[J].空气动力学学报,2017,35(6): 846-849.L i J i g u a n g,C h e nX i n,L i Z h e n.A e r o d y n a m i c d e s i g n a n d a-n a l y s i s o f t i p d e v i c e so nc a r r i e r-b a s e df l y-w i n g U A V w i t hs t e a l t hc o n s t r a i n t s[J].A c t a A e r o d y n a m i c aS i n i c a,2017, 35(6):846-849.(i nC h i n e s e)[8]杨志强,黄俊.推力矢量控制的鸭式布局无人侦察机气动特性研究[J].飞机设计,2013,33(2):1-3,7.Y a n g Z h i q i a n g,H u a n g J u n.S t u d y o na e r o d y n a m i c c h a r a c-t e r i s t i c s o f d u c k-t y p e u n m a n n e d r e c o n n a i s s a n c e a i r c r a f tw i t ht h r u s t v e c t o r c o n t r o l[J].A i r c r a f tD e s i g n,2013,33(2):1-3,7.(i nC h i n e s e)[9]蒋彪,李杰.民机翼梢小翼气动特性数值模拟分析研究[J].航空计算技术,2011,41(1):38-43.J i a n g B i a o,L i J i e.S t u d y o nn u m e r i c a l s i m u l a t i o na n a l y s i so f a e r o d y n a m i c c h a r a c t e r i s t i c so f c i v i l a i r c r a f tw i n g l e t s[J].A e r o n a u t i c a l C o m p u t e rT e c h n i q u e,2011,41(1):38-43.(i nC h i n e s e)[10]江永泉.飞机翼梢小翼设计[M].北京:航空工业出版社,2009:17-177.J i a n g Y o n g q u a n.A i r c r a f tw i n g l e t d e s i g n[M].B e i j i n g:A v i-a t i o n I n d u s t r y P r e s s,2009:17-177.(i nC h i n e s e)[11]聂营,王生,杨燕初.螺旋桨静推力数值模拟与实验对比分析[J].计算机仿真,2009,26(3):103-107.N i eY i n g,W a n g S h e n g,Y a n g Y a n c h u.N u m e r i c a l s i m u l a-t i o n a n d e x p e r i m e n t a l c o m p a r a t i v e a n a l y s i s o f p r o p e l l e r s t a t-i c t h r u s t[J].C o m p u t e r S i m u l a t i o n,2009,26(3):103-107.(i nC h i n e s e)[12]王璐,王云,陈宇.新型旋翼推进式无人飞艇气动特性研究[J].飞行力学,2017,35(5):22-25,30.W a n g L u,W a n g Y u n,C h e n Y u.S t u d y o na e r o d y n a m i cc h a r a c t e r i s t i c so fan e wt y p eo fr o t o r-p r o p e l l e du n m a n n e da i r s h i p[J].F l i g h tD y n a m i c s,2017,35(5):22-25,30.(i nC h i n e s e)[13]C h e nS,D o o l e nG D.L a t t i c eB o l t z m a n n m e t h o df o r f l u i df l o w s[J].A n n u a lR e v i e w o fF l u i d M e c h a n i c s,1998,30(1):329-364.(下转第663页)336第5期 张飞等:垂直起降固定翼无人机的翼尖垂尾设计分析o nr e s e a r c ha n dd e v e l o p m e n to f m e m o r y n e u r a ln e t w o r k s[J].J o u r n a lo fS o f t w a r e,2017,28(11):2905-2924.(i nC h i n e s e)[11]S u t s k e v e rI,V i n y a l s O,L e Q V.S e q u e n c et os e q u e n c el e a r n i n g w i t hn e u r a l n e t w o r k s[C]∥I nP r o c e s so f t h eA d-v a n c e s i nN e u r a l I n f o r m a t i o nP r o c e s s i n g S y s t e m s,C a n a d a,2014:3104-3112.[12]廖成,刘鲁,晓斌.机场旅客吞吐量的人工神经网络预测方法[J].小型微型计算机系统,2002,23(12):1500-1502.L i a oC h e n g,L i uL u,X i a oB i n.A r t i f i c i a ln e u r a ln e t w o r k sm e t h o d f o r p r e d i c t i n g t h e a i r p o r t p a s s e n g e r t h r o u g h p u t[J].J o u r n a lo f C h i n e s e C o m p u t e r S y s t e m s,2002,23(12): 1500-1502.(i nC h i n e s e)[13]张青青,晏蝶,赵敏,等.基于B P神经网络的龙洞堡机场旅客吞吐量预测研究[J].价值工程,2016,35(13):101-103.Z h a n g Q i n g q i n g,Y a nD i e,Z h a o M i n,e t a l.S t u d y o nt h ep r e d i c t i o no f p a s s e n g e r t h r o u g h p u t i nL o n g d o n g b a oa i r p o r tb a s e do nB Pn e u r a l n e t w o r k[J].V a l u eE n g i n e e r i n g,2016,35(13):101-103.(i nC h i n e s e)[14]徐俊刚,裴莹.数据E T L研究综述[J].计算机科学,2011,38(4):15-20.X uJ u n g a n g,P e i Y i n g.O v e r v i e wo f d a t a e x t r a c t i o n,t r a n s-f o r m a t i o na n dl o a d i n g[J].C o m p u t e rS c i e n c e,2011,38(4):15-20.(i nC h i n e s e)[15]R u m e l h a r tDE,H i n t o nGE,W i l l i a m sRJ.L e a r n i n g r e p-r e s e n t a t i o nb y b a c k-p r o p a g a t i n g e r r o r s[J].N a t u r e,1986, 323(9):533-556.作者简介:钟 翔(1975-),男,硕士,工程师㊂主要研究方向:机场管理㊁机场建设规划㊁能源输配系统㊁信息系统等㊂朱彩云(1982-),女,硕士,工程师㊂主要研究方向:机场信息化建设规划㊁神经网络㊁计算机应用技术等㊂韩 旭(1984-),男,硕士,工程师㊂主要研究方向:计算机应用技术㊁数据通信技术㊁数据挖掘等㊂(编辑:马文静) (上接第633页)[14]王刚,胡峪,宋笔锋.利用螺旋桨动力配平的飞翼布局无人机[J].西北工业大学学报,2014,32(2):181-187.W a n g G a n g,H uY u,S o n g B i f e n g.F l y i n g w i n g l a y o u tU A Vu s i n gp r o p e l l e r p o w e rb a l a n c e[J].J o u r n a l o fN o r t h w e s t e r nP o l y t e c h n i c a lU n i v e r s i t y,2014,32(2):181-187.(i n C h i-n e s e)[15]张庆峰,熊克,李伟,等.变体翼梢小翼的减阻机理数值模拟[J].航空动力学报,2014,29(5):1105-1111.Z h a n g Q i n g f e n g,X i o n g K e,L iW e i,e t a l.N u m e r i c a l s i m u-l a t i o no f d r a g r e d u c t i o n m e c h a n i s m o fv a r i a n tw i n g l e t s[J].J o u r n a l o fA e r o s p a c eP o w e r,2014,29(5):1105-1111.(i nC h i n e s e)作者简介:张 飞(1993-),男,硕士研究生㊂主要研究方向:航空工程㊂王 云(1966-),男,博士,教授㊂主要研究方向:宇航推进理论㊂孙一方(1993-),男,硕士研究生㊂主要研究方向:飞行器设计㊂谭 锟(1993-),男,硕士研究生㊂主要研究方向:宇航推进理论㊂(编辑:马文静)366第5期 钟翔等:基于B P神经网络的机场安检旅客流量预测模型。
垂直起降无人机总体方案分析及控制策略综合研究
Abstract: A s a comb ination o f VTOL ( V ert ica l T ake- O ff and L and ing ) technology and UAV ( Unm anned A er ia lV eh ic le), VTOL- UAV s can prov ide not only vert ical take- off / land ing and hovering capab ilities, as a helicopter, but a lso h igh speed and long range capab ilities, as a f ixed- w ing a irplane.perform spec ial m issions as a comm on UAV.
# 27#
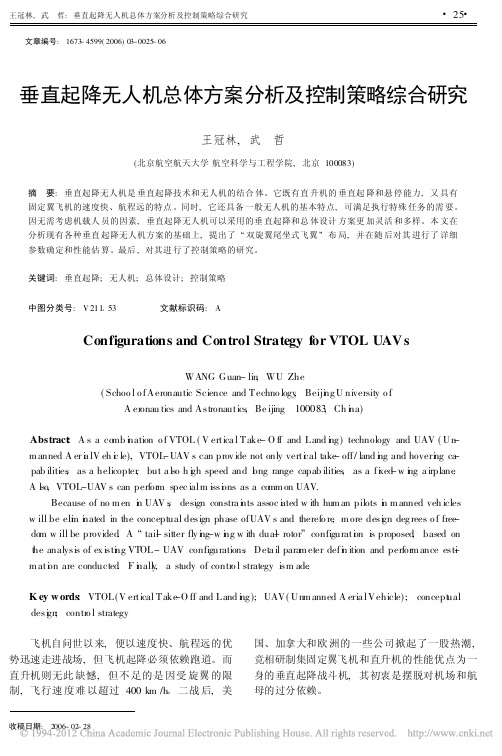
( a) 倾转旋翼式 E ag le- Eye
( a) F ire- Scout
( b) 倾转机身式 Sco rp ion
( b) CL - 227 图 1 2种推力定向类垂直起降无人机
212 推力换向类 推力换向是目前垂直起降无人机广泛采用的
形式, 起飞时推力向上, 转入水平飞行时推力向 前倾转, 同时, 由机翼承担部分或全部升力。因 为翼面空气流速越低, 气动效率越高, 所以相同 情况下, 采用机翼获取升力的无人机比纯直升机 具有更高的飞行效率, 并由此得到更远的航程。
2 垂直起降无人机研究现状
和有人驾驶飞机相比, 垂直起降无人机尺寸 及需用功率较小, 飞行速度低, 故目前动力装置 大多为小功率涡轮轴或活塞式发动机, 少数采用 涡扇发动机。动力系统决定了目前绝大部分垂直 起降无人机属于旋翼类飞行器。按推力 ( 拉力 ) 的 实现方式, 可将目前具有垂直起降能力的旋翼类 飞行器 分 为 两 大 类: 推 力 定 向 式 和 推 力 换 向 式 [ 1] 。 211 推力定向类
垂直起降无人机总体方案分析及控制策略综合研究

垂直起降无人机总体方案分析及控制策略综合研究垂直起降无人机(Vertical Take-off and Landing, VTOL)是一种具有垂直起降能力的无人机系统,它能够实现从垂直起飞到水平飞行的转换,具有快速部署、无需跑道等优点,适用于各种环境和任务需求。
本文将对垂直起降无人机的总体方案和控制策略进行综合研究。
垂直起降无人机的总体方案包括飞行器设计、传动系统和自动控制系统等组成部分。
首先是飞行器设计,包括机翼、螺旋桨和尾翼等气动力学设计,以保证飞行器具有稳定的操纵性和飞行性能。
其次是传动系统设计,包括发动机、推进器和传动装置等,以提供足够的推力和动力输出。
最后是自动控制系统设计,包括姿态控制、导航系统和飞行控制计算机等,以实现无人机的自主飞行和导航能力。
在飞行中,垂直起降无人机的控制策略主要包括姿态控制、高度控制和航迹控制等。
姿态控制是指控制飞行器在空中的姿态角度,包括滚转、俯仰和偏航角等。
通过控制飞行器的姿态角度,可以实现飞行器在水平飞行和垂直起降之间的转换。
高度控制是指控制飞行器的飞行高度,包括上升、下降和悬停等。
通过控制飞行器的推力和姿态角度,可以实现飞行器在不同高度间的控制。
航迹控制是指控制飞行器的飞行路径和方向,可以通过控制飞行器的航向角和偏航角等参数来实现。
在姿态控制方面,可以采用PID控制算法来实现飞行器的姿态稳定。
PID控制算法是一种常用的自动控制算法,通过对误差信号进行比例、积分和微分处理,来产生控制指令。
在高度控制方面,可以采用高度反馈控制和速度控制相结合的方式,通过调整飞行器的推力和姿态角度,来实现高度的控制。
在航迹控制方面,可以采用航迹跟踪控制算法,通过计算当前位置和目标位置之间的偏差,调整飞行器的航向角和偏航角,来实现航迹的控制。
总的来说,垂直起降无人机的总体方案和控制策略是一个复杂而综合的研究课题,需要设计合理的飞行器结构和传动系统,并结合自动控制算法实现飞行器的稳定飞行和导航能力。
垂直起降运载无人机的设计制作与优化
度归零,打开货舱投放。
1机翼、2电机座、3运载环、4蒙皮、5副翼、6方向舵、7舵机、8挡杆、9骨架碳杆、10固联小木块、11弹性碳纤维杆、12方桐木
图1机身结构示意图
3三维模型的建立
3.1部分零部件
图2部分零部件建模示意图
3.2各个机体部件(包含装配图)
(1)机翼
机翼采取曲面,空气动力性能好1)机翼:机翼面积大,所受升力大;采用流线型,空气动力性能好,阻力小,提高速度和航程。
(2)电机固定座
电机固定座:制作木机,,但电机安装已不能用常规方法。
本方案电机固定座采取与机翼结合的方法,安全稳定。
(3)运载与投放装置
投放装置:在两边设置两个对称投放环,一,保持重心在中间位置,不会造成飞行和投放过程失稳。
二,支撑支架
运载与投放装置建模示意碳棒支撑,使用等大立方体来,提高碳棒间的联系,受落时的冲击载荷,保护整体原理
的差速偏航控制:该无人在平飞状态下通过遥控器的速度差,使得两侧流经机身在水平方向进行偏转
了机动性能。
平飞姿态之间的互相转换过操纵舵机控制副翼偏转气朝一方偏移,推动飞机用飞控进行辅助控制,能自动调节舵面转向来调节。
垂直起降固定翼无人机研究报告

垂直起降固定翼无人机研究报告垂直起降固定翼无人机是一种能够在垂直方向起降的固定翼飞行器。
它结合了直升机的垂直起降能力和固定翼飞机的长航程和高速飞行性能,具备了独特的优势。
本篇报告将就垂直起降固定翼无人机的技术原理、应用领域以及前景进行研究。
首先,垂直起降固定翼无人机的技术原理。
该飞行器通常由固定翼和垂直起降系统两部分组成。
固定翼部分主要负责飞行和巡航,通常使用常规的翼形和控制方式。
垂直起降系统通常由垂直升降发动机、倾转推力器或者其他垂直起降设备组成。
垂直起降无人机可以像直升机一样,从静止状态垂直起飞,并且具备固定翼飞机的远程巡航和高速飞行能力。
其次,垂直起降固定翼无人机的应用领域。
由于其独特的起降方式和多功能性,该类型无人机在军事、民用和商业领域都有广泛的应用前景。
在军事领域,垂直起降固定翼无人机可以用于侦察、监视、打击和后勤支援任务。
它们可以在短时间内从任何位置起飞,执行各种任务,并且能够在困难的地形和气候条件下操作。
在民用领域,垂直起降固定翼无人机可以用于物流运输、搜救、灾害监测和环境监测等任务。
在商业领域,垂直起降固定翼无人机可以用于快速递送、航拍摄像、物流配送等领域,具有巨大的市场潜力。
最后,垂直起降固定翼无人机的前景。
垂直起降固定翼无人机在航空领域中具有独特的优势,能够克服传统飞机和直升机的限制,具有更高的安全性和经济性。
随着无人机技术的不断发展和成熟,垂直起降固定翼无人机的性能将进一步提升,应用领域也会不断扩大。
尽管目前垂直起降固定翼无人机技术仍存在一些挑战,如飞行稳定性、垂直起降系统的可靠性和能源消耗等问题,但随着技术的不断进步和创新,这些问题将逐渐得到解决。
因此,垂直起降固定翼无人机有着广泛的发展前景。
综上所述,垂直起降固定翼无人机是一种具备垂直起降能力和固定翼飞行性能的飞行器。
它在各个领域都有广泛的应用前景,并且随着技术的发展和创新,其性能将进一步提升。
尽管目前还存在技术挑战,但相信这些问题将逐渐解决。