行人自助过街交通灯系统设计与实现
智能交通系统中的智能红绿灯的设计与实现
智能交通系统中的智能红绿灯的设计与实现随着城市化进程的不断加快,交通问题一直是困扰城市发展的瓶颈之一。
因此,设计和实现智能交通系统成为了现代城市建设的重要任务之一。
而在智能交通系统中,一个关键的组成部分就是智能红绿灯系统。
在本文中,我将探讨智能红绿灯系统的设计与实现。
一、智能红绿灯系统的目标智能红绿灯系统的目标是为了提高城市交通效率,减少交通拥堵和交通事故,为行人和车辆提供更加便捷、安全和高效的出行服务。
具体来说,智能红绿灯系统的目标包括以下方面:1、提供实时的交通状况信息,实时调整交通信号配时,优化交通信号配时方案,提高交通效率和交通安全;2、为行人、车辆提供便捷的通行服务,尽可能减少等待时间,提供更加合理、有效的信号控制方案;3、提供车辆、行人的自动识别和计数服务,为交通规划和管理提供数据支持。
二、智能红绿灯系统的原理和方案智能红绿灯系统的设计原理是基于各种传感器和控制器,从车辆、行人的角度来优化交通信号配时,提高交通效率和交通安全。
具体的实现方案包括以下几个方面:1、数据采集和处理智能红绿灯系统通过采集和处理数据来获取实时的交通状况信息。
数据采集技术主要包括视频监控、车辆探测器、行人探测器、智能手机应用等多种方式,这些采集方式可以确保数据的准确性、及时性和全面性。
数据处理技术包括数字图像处理、数据挖掘、人工智能算法等。
2、信号控制智能红绿灯系统可以根据采集的数据实时调整信号配时方案,以优化交通流程,减少等待时间,提高交通效率和安全。
例如,当路口交通流量较大时,交通信号配时可以相应地调整,以避免交通拥堵和交通事故的发生。
3、自动识别和计数智能红绿灯系统可以自动识别车辆和行人,并进行计数。
这些数据为交通规划和管理提供数据支持。
例如,交通管理部门可以利用这些数据制定合理的交通规划,优化交通网络,提高城市交通效率和安全。
三、智能红绿灯系统的应用与前景智能红绿灯系统在城市交通管理中的应用和前景是非常广阔的。
自助式人行过街红绿灯实现原理
自助式人行过街红绿灯实现原理一、概述人行过街红绿灯是城市交通管理中不可或缺的重要组成部分,它可以有效地指挥行人和车辆的行进,保障道路交通的安全和畅通。
随着城市化进程的不断推进,人行过街红绿灯的设计和实现方式也在不断创新和改进。
其中,自助式人行过街红绿灯作为一种新型的交通信号控制方式,受到了越来越多城市管理部门和交通专家的青睐。
本文将介绍自助式人行过街红绿灯的实现原理。
二、自助式人行过街红绿灯的定义自助式人行过街红绿灯,顾名思义,是指行人在过马路时可以自己操作信号灯的开关,而无需等待固定的信号灯变化。
这种交通信号控制方式通过让行人自主控制红绿灯,能够更灵活地满足不同时间段、不同场景下行人通行的需求,提高行人过街的效率和便利性。
三、自助式人行过街红绿灯实现原理自助式人行过街红绿灯的实现原理主要包括传感器检测、信号控制系统和人机交互界面三个方面。
1. 传感器检测自助式人行过街红绿灯的实现需要借助各种传感器技术来监测行人的存在和行为。
传感器通常安装在人行道两侧或者交通岛上,通过红外线、摄像头、超声波等技术实时监测行人的数量、位置和行进方向,从而为信号控制系统提供准确的行人信息。
2. 信号控制系统传感器通过监测行人的情况后,将相关信息传输给信号控制系统。
信号控制系统根据传感器提供的数据和预设的信号灯控制策略,决定是否改变信号灯状态。
当有行人需要过马路时,信号控制系统会根据实际情况灵活调整信号灯的状态,为其开启合适的通行时间。
信号控制系统也需要考虑车辆通行情况,确保行人过马路的同时不会对车辆通行造成影响。
3. 人机交互界面为了实现行人对信号灯的自主控制,自助式人行过街红绿灯需要在适当的位置设置人机交互界面。
这些界面通常采用易操作的按钮或者触摸屏,让行人可以根据实际情况选择合适的时间过马路。
人机交互界面也需要具备一定的提示功能,告知行人何时按下按钮或者触摸屏,以及何时可以开始过马路。
四、自助式人行过街红绿灯的优势自助式人行过街红绿灯相比传统的固定式人行过街信号灯,有着诸多优势。
自助行人过街信号灯原理
自助行人过街信号灯原理自助行人过街信号灯,也被称为行人过街系统或自动行人过街系统,是一种智能交通系统。
它的出现,极大地改善了行人过街的安全性和便利性,特别是在繁忙的路口或交通流量大的地方。
这种系统的原理是基于多种先进的技术和设计理念,下面我们来详细探讨一下它的工作原理。
首先,自助行人过街信号灯的核心是一个高度自动化的控制系统。
这个系统通过高精度传感器和算法,能够实时检测行人和车辆的活动,并根据这些活动来调整信号灯的亮度和持续时间。
这样,系统就能确保行人在安全的情况下过街,同时也不会对车辆的行驶造成干扰。
具体来说,传感器是这套系统的“眼睛”。
它们被安装在路面上或者信号灯上,负责收集关于行人和车辆的信息。
这些传感器能够检测到行人的步伐速度、车辆的数量和速度等,并将这些信息实时传输给控制系统。
控制系统则像大脑一样,负责接收和处理这些信息。
通过复杂的算法,控制系统能够预测行人和车辆的行为,并据此调整信号灯的亮度和持续时间。
例如,当检测到有行人准备过街时,控制系统会自动延长人行道信号灯的时间,确保行人安全通过路口。
此外,自助行人过街信号灯还具有高度的智能化和自适应性。
随着时间的推移,控制系统会不断学习和调整,以适应不同的交通状况和行人的习惯。
例如,对于经常有人闯红灯的交叉路口,系统会自动加强监控和警报,以减少这类行为的发生。
当然,自助行人过街信号灯并非没有挑战和限制。
例如,传感器的准确性和可靠性、控制系统的稳定性和安全性等都是需要重点关注的问题。
此外,如何确保行人和车辆都能公平地使用道路资源也是一个需要解决的问题。
总的来说,自助行人过街信号灯是一种利用先进技术改善行人过街安全性和便利性的智能交通系统。
它的工作原理基于高精度传感器、复杂算法和高度自动化的控制系统。
未来,随着技术的不断进步和应用场景的不断扩大,自助行人过街信号灯有望在更多的地方得到应用,为我们的生活带来更多的便利和安全。
毕业设计(论文)-基于单片机的人行过马路智能交通灯系统的设计概要

摘要纵观单片机的发展和应用, 51 单片机越来越无法满足用户的需求, ARM 高速32位单片机的出现,缔造了嵌入式系统的新纪元 .嵌入式系统是指以应用为中心,以计算机技术为基础,软件,硬件可裁减,适应应用系统对功能、可靠性、成本、体积、和功耗严格要求的专用计算机系统。
嵌入式系统已广泛地渗透到科学研究、工程设计、军事等各种领域、甚至商业、文化、艺术、及人们日常生活的方方面面。
随着国内外各种嵌入式产品的进一步开发和推广,嵌入式技术的重要性日益凸显,使得我们不得不将注意力转移到它身上。
ARM 的应用已遍及工业控制、消费类电子产品、通信系统、网络系统、无线系统等各类产品市场。
此设计采用了 ARM7 微处理器 LPC2103作为核心处理器。
本文介绍了一个智能交通灯系统的设计。
该智能交通灯控制系统可以实现的功能有:对某人行马路的交通路口进行控制和对红绿灯的闪亮控制;各路口有固定的工作周期。
人行过马路交通灯控制系统不仅可以缓解交通拥堵,还能阻止一些交通事故的发生。
它采用 LPC2103来实现对红绿灯的控制。
其中通过设置 LPC2103的 GPIO 功能用定时器来实现 LED 灯的亮灭与闪亮。
关键词 :ARM7 LPC2103 LED灯AbstractAbstractThroughout the development and application of SCM, 51 SCM increasingly unable to satisfy the demand of users, ARM speed 32bit MCU embedded systems, creates the new era of embedded system.Refer to the application for the center to computer technology as the foundation, software, hardware, can adapt to function, application system reliability, cost, volume, and the power of the strict specialized computer system. The embedded system has been widely permeates scientific research and engineering design, military and other fields, oreven commercial, culture, art, and all aspects of People's Daily life. With the further development of embedded products, and the importance of the embedded technology allows us to increasingly prominent, divert attention to it. The ARM of the application in industrial control, consumer electronics, communication system, network system, wireless systems and other kinds of product market. This design uses the LPC2103 ARM7 microprocessor core processors . This article describes an intelligent traffic light system. The intelligent traffic light control system functions can be achieved: the road trip against a person to control the traffic junctions and traffic lights to flash control; the intersection with a fixed duty cycle. Pedestrian crossing traffic light control system can not only ease traffic congestion, but also prevent a number of traffic accidents. It uses LPC2103 to realize the control of traffic lights. LPC2103's GPIO by setting them with a timer function to achieve bright LED lights off and shine.Key words:ARM7 LPC2103 LED lights目录摘要 . (I)Abstract . ................................................................ II 目录 . ................................................................... III 1 引言 . (1)1.1背景 ................................................................ 1 1.2现状问题 (2)2 工作硬件原理 . (3)2.1LPC2103简介 . ........................................................ 3 2.1.1 概述 ............................................................ 3 2.1.2 管脚信息 ........................................................ 3 2.2ARM2103底板原理图 . .................................................. 4 2.2.1 电源电路 ........................................................4 2.2.2 时钟电路 ........................................................ 4 2.2.3 JTAG接口电路 . ................................................... 4 2.2.4 LPC2103电路原理图和最小系统实物图 . .............................. 5 2.2.5 人行过马路交通灯控制系统电路原理图 (6)3 工程建立和调试 . (7)3.1ADS 1.2集成开发环境的组成 ........................................... 7 3.1.1 CodeWarrior IDE简介 . ............................................ 7 3.2工程的编辑 .......................................................... 9 3.2.1建立工程 .......................................................... 9 3.2.2 建立文件 ....................................................... 10 3.2.3 添加文件到工程 ................................................. 10 3.2.4 编辑连接工程 ...................................................11 3.3工程的调试 (12)4 LPC2103基础知识详解 (13)4.1引脚链接模块 ....................................................... 13 4.1.1 概述 ........................................................... 13 4.1.2 寄存器描述 ..................................................... 13 4.2GPIO ...............................................................15 4.2.1 概述 (15)4.2.2 寄存器描述 ..................................................... 16 4.3向量中断控制器 ..................................................... 17 4.3.1 概述 ........................................................... 17 4.3.2 寄存器描述 ..................................................... 17 4.3.3 向量 IRQ 中断 ................................................... 18 4.4定时器 0和定时器1 . ................................................. 19 4.4.1 概述 .. (19)4.4.2 特性 ........................................................... 19 4.4.3 引脚描述 ....................................................... 20 4.4.4 寄存器描述 ..................................................... 20 4.4.5 定时器中断 (23)5 带闪烁人行过马路交通灯控制系统的设计与实现 . (26)5.1带闪烁人行过马路交通灯控制的基本规则 ............................... 26 5.2人行过马路交通灯点亮与熄灭的原理 ................................... 28 5.3ARM 定时器控制的原理 ............................................... 28 5.4ARM 中断控制的原理 ................................................. 29 5.5人行过马路交通灯控制系统的硬件设计 ................................. 29 5.6人行过马路交通灯控制程序的设计 ..................................... 29 5.6. 1 定时器 0初始化程序 .. (29)5.6. 2 定时器 1初始化程序 ............................................ 31 5.6. 3 中断服务程序 .................................................. 31 5.6. 4 主程序 ........................................................326 总结与体会 . (33)6.1总结 ............................................................... 33 6.2体会 ............................................................... 33 6.3致谢 ............................................................... 34 6.4参考文献 (34)附录 A 源程序 (35)引言1引言随着我国改革开放的不断深入 ,城市化进程不断加快 ,交通事业飞速发展 ,交通拥挤已成为城市经济发展的“瓶颈” , 特别是大、中城市不断增加的车辆和有限的道路空间矛盾日益加剧。
步行街道自助式交通灯控制器的设计
2012-2013学年第二学期课题:步行街道自助式交通灯控制器的设计学院:班级:姓名:学号:指导老师:摘要随着社会经济的发展,城市交通问题越来越引起人们的关注。
人、车、路三者关系的协调,已成为交通管理部门需要解决的重要问题之一。
城市交通控制系统是用于城市交通数据监测、交通信号灯控制与交通疏导的计算机综合管理系统,它是现代城市交通监控指挥系统中最重要的组成部分。
所以,如何采用合适的控制方法,最大限度利用好耗费巨资修建的城市双干线道路,越来越成为交通运输管理部门亟待解决的主要问题。
论文研究交通灯控制器的设计与实现,并利用EDA技术等知识设计了一套自助式交通灯控制器的方案。
自助式交通灯控制器主要由计数电路、控制电路、信号灯转换器、脉冲信号发生器组成。
通过采用数字电路自助式对交通灯控制器的设计,提出使自助式交通灯控制器用数字信号自动控制双干线路口两组红、黄、绿交通灯的状态转换的新方法,指挥各种车辆和行人安全通行,实现双干线路口交通管理的自动化。
EDA技术在自动化控制实现方面有着诸多优势,值得进一步学习和研究。
关键词:交通控制系统 EDA 自助式交通灯控制器自动化AbstractAlong with social economy’s develpoment, themunicipal transportation question arouses people’s interest more and more. The person, the vechicle, road three re;ations’coordinated, have become one which of important questions the traffic control department needs to solve. The municipal transportation control system is uses in the municipal transportation control system is uses in the municipal transportation data monitor, the street-traffic control lights control and the transportation unblocking computer integrated management system, it is in the modern municipal transportation monitoring command system the most important constituent. Therefore, how to use the appropriate control method, maximum limit uses the good consumption large amount of money construction the city double main road, becomes the subject matter which more and more traffic management department urgently awaits to be solved. the paper research traffic light controller's design with realizes, and using knowledge and so on EDA technology has designed a set of self-service type traffic light controller's plan. The self-service type traffic light controller mainly by the counting circuit, the control circuit, the signal light switch, the signal impulse generator is composed. Through uses the digital circuit self-service type to the traffic light controller's design, proposed that causes the self-service type traffic light controller with the digital signal automatic control double skeleton line street intersection two groups red, yellow, the green traffic light's phase transition new method, directs each kind of vehicles and the pedestrian passes through safely, realizes the double skeleton line street intersection traffic control automation.The EDA technology realizes the aspect in the automated control to have many superiority, is worth further studying and studying.Keywords:traffic control system self-service traffic lights, EDA,automation controller目录第一章EDA技术1.1 EDA技术的发展回顾----------------------------------------------(1)1.2 EDA技术的构成----------------------------------------------------(2)1.3 EDA设计行为描述语言-------------------------------------------(3)第二章EDA设计方法流程及其工具2.1 FPGA/CPLD设计流程--------------------------------------------(4)2.2 EDA的一般设计方法---------------------------------------------(4)2.3各种电子系统设计步骤综述-------------------------------------(4) 第三章VHDL设计3.1QuartusⅡ概述-------------------------------------------------------(5)3.2QuartusⅡ软件的开发流程----------------------------------------(6)3.3 QuartusⅡ工程的创建与管理------------------------------------(6)3.4设计输入---------------------------------------------------------------------(6)3.5编译处理---------------------------------------------------------------------(6)3.6仿真测试---------------------------------------------------------------------(7)3.7设计仿真---------------------------------------------------------------------(7) 第四章步行街道自助式交通灯控制器的设计4.1 统设计要求----------------------------------------------------------(8)4.2 系统设计方案-------------------------------------------------------(8)4.3VHDL源程序-------------------------------------------------------(9)4.4 系统仿真-------------------------------------------------------------(10)总结------------------------------------------------------------------------------(14)参考文献------------------------------------------------------------------------(15)附件VHDL源程序---------------------------------------------------------(15)第一章EDA技术1.1 EDA技术的发展回顾EDA技术伴随着计算机、集成电路、电子系统设计的发展,经历了计算机辅助设计CAD(Computer Assist Design) 、计算机辅助工程设计CAE(Computer Assist Engineering Design)和电子系统设计自动化ESDA(Electronic System Design Automation)三个发展阶段。
自助式人行过街红绿灯原理

自助式人行过街红绿灯原理
自助式人行过街红绿灯是一种交通信号设备,旨在为行人提供安全的过街通道。
其原理涉及到感应器、控制器和信号灯等组件。
首先,自助式人行过街红绿灯使用感应器来检测行人是否需要过马路。
这些感应器通常安装在行人通行的地面上,当行人站在感应器上时,感应器会检测到行人的存在并向控制器发送信号。
其次,控制器是自助式人行过街红绿灯的核心部件,它接收来自感应器的信号并根据这些信号控制信号灯的变化。
当没有行人需要过马路时,控制器会让红灯亮起,以停止车辆通行;当有行人需要过马路时,控制器会让绿灯亮起,以允许行人通行。
最后,信号灯是自助式人行过街红绿灯的可视化指示器,通过红色和绿色的灯光来告知行人和车辆当前的通行状态。
红灯表示停止,绿灯表示通行,这种明确的指示有助于行人和车辆遵守交通规则,从而确保交通安全。
总的来说,自助式人行过街红绿灯的原理是通过感应器检测行人需求,控制器根据需求控制信号灯的变化,以确保行人安全地过
马路并与车辆交通有序地协调通行。
这种智能化的交通信号设备在提高交通效率和保障行人安全方面发挥着重要作用。
自助式人行过街红绿灯算法设计

自助式人行过街红绿灯算法设计1.状态切换算法设计1.1初始化:绿灯状态为初始状态,并设置一个定时器,定时器时间根据实际情况设定。
1.2监听行人按钮:当行人按下相应的按钮时,触发信号灯状态切换。
1.3状态切换:-当绿灯状态且行人按下按钮时,将状态切换为黄灯状态,并设置一个较短的定时器,用于提醒行人准备过马路。
-当黄灯状态时,根据实际情况进行延时,然后切换为红灯状态。
-当红灯状态时,延时一段时间后切换为绿灯状态。
1.4重置:当信号灯切换到新的状态时,重新开始定时器。
2.行人过马路的优先级控制在自助式人行过街红绿灯系统中,行人通行的优先级应高于其他交通流。
以下是一个行人过马路的优先级控制算法设计:2.1监听行人按钮:当行人按下相应的按钮时,触发行人过马路动作。
2.2优先级控制:-当信号灯为绿灯状态时,行人可以通行。
-当信号灯为黄灯或红灯状态时,行人不允许通行。
-当行人按下按钮后,如果当前信号灯为黄灯或红灯状态,应等待信号灯切换到绿灯状态后再通行。
2.3限制行人数量:为避免拥堵和安全问题,可以限制同一时间通过的行人数量。
2.4延时设置:行人过马路的时间应根据实际情况设定,可以根据道路宽度、行人数量和交通流量等因素进行调整。
2.5通行限制:当信号灯状态由绿灯切换到黄灯时,不再允许行人按下按钮触发过马路动作,直到信号灯切换为红灯状态后解除限制。
以上是一个简单的自助式人行过街红绿灯算法设计,可以根据实际情况进行优化和调整。
在实际应用中,还需要考虑到其他因素,如交通流量监测、行人安全设施等,以提高自助式人行过街红绿灯系统的效果和安全性。
智能交通灯管理系统的设计和实现
智能交通灯管理系统的设计和实现随着人们生活水平的提高,城市内的机动车数量以及人员流量越来越大,为了保障交通的安全与便捷,智能交通灯管理系统应运而生。
一、设计目的智能交通灯管理系统旨在提供全面的交通管控方案,包括车辆与行人流量的监测、智能绿灯时间的调配及异常情况处理。
其设计目的主要包括以下方面:1.提高交通流量的效率,缓解交通拥堵问题;2.提升交通安全水平,降低交通事故发生率;3.智能化管理,让公共交通更便捷、更经济。
二、设计要点交通灯控制系统是智能交通灯管理系统中最为重要的组成部分之一,其设计要点如下:1.车辆或行人流量监测传感器的安装,以物联网技术进行相互连接;2.建立基于流量检测的交通管理模型,实现对路口互动信息的监测及分析;3.对路口交通信息进行分析,实时计算绿灯时间,并根据交通流量实时调配绿灯时间,以实现绿灯变换更加科学合理;4.针对复杂路口,对智能交通灯控制系统进行优化升级,提高交通流量效率。
三、实现方法智能交通灯管理系统的实现方法大致可以分为以下几个步骤:1.使用传感器捕捉路口的行人和车辆数据,将数据传输到后端系统数据处理系统;2.在后端数据处理系统中,使用大数据分析技术对传感器收集数据进行分析;3.在数据分析阶段,系统会根据路口流量状况设计最优的路口信号时间表;4.通过这样的优化,绿灯时间将会更加合适,不仅缓解了路口拥堵,还提高了交通生产力;5.系统持续进行数据的分析和优化,以逐步优化路口信号的性能和效率。
四、优点及前景智能交通灯管理系统相对于传统的交通灯控制系统,具有以下优点:1.更加科学合理,绿灯时间更加准确、合理而且比较符合实际;2.实时监测路口的交通流量、车辆与行人,及时采取最适宜的灯光变换方案;3.减少路口拥堵情况,提升了交通流量效率,缩短了人们等待的时间。
随着智能技术的迅速发展,智能交通灯管理系统在未来有着广阔的前景和市场。
未来智能交通灯管理系统将会成为人们日常交通中不可或缺的一部分,并成为城市智能化建设的基石之一。
交通灯顺序控制系统的程序设计与实现

交通灯顺序控制系统的程序设计与实现一、本文概述随着城市化进程的加速和交通流量的日益增大,交通灯控制系统在维护交通秩序、保障行车安全方面发挥着至关重要的作用。
本文旨在探讨交通灯顺序控制系统的程序设计与实现,通过分析现有的交通灯控制策略,结合现代编程技术和智能交通系统的发展趋势,提出一种高效、智能的交通灯顺序控制方案。
本文首先概述了交通灯控制系统的重要性和设计要求,然后详细介绍了交通灯顺序控制系统的设计原则、关键技术和实现方法,最后通过案例分析,验证了所提出控制策略的有效性和实用性。
本文旨在为交通灯控制系统的研究和应用提供理论支持和实践指导,为城市交通管理水平的提升和智能交通系统的发展贡献力量。
二、交通灯顺序控制系统的基本原理交通灯顺序控制系统,也被称为交通信号灯控制系统,是城市交通管理的重要组成部分。
其基本原理在于通过预设的时间序列来控制交通信号灯的红、黄、绿三种颜色灯的亮灭,从而有序地引导和控制交通流。
时间序列设定:根据交通流量和道路设计,为每一个交通路口设定一个特定的时间序列,这个序列规定了红灯、绿灯和黄灯的亮灭时间。
一般情况下,绿灯亮时,表示车辆可以通行;红灯亮时,表示车辆必须停止;黄灯亮时,表示警告,车辆应该减速并准备停止。
传感器检测:通过安装在路口的传感器,如车辆检测器、行人按钮等,实时检测交通流量和行人过街需求,将这些信息反馈给控制系统。
控制系统处理:控制系统接收到传感器的反馈信息后,会根据预设的算法和规则,对时间序列进行动态调整。
例如,如果检测到某个方向的车辆流量较大,控制系统可能会增加该方向绿灯的亮灯时间。
信号灯控制:控制系统通过输出信号,控制交通信号灯的亮灭。
这些信号通常是电信号,可以直接驱动交通信号灯。
安全保障:交通灯顺序控制系统还会考虑到一些特殊情况,如紧急车辆通行、故障处理等。
在这些情况下,控制系统会优先保障交通安全。
通过以上五个方面的协同工作,交通灯顺序控制系统能够有效地引导和控制交通流,提高道路通行效率,保障交通安全。
自助式人行过街红绿灯算法设计

自助式人行过街红绿灯算法设计摘要:本文介绍了一种自助式人行过街红绿灯算法设计,该算法主要通过分析行人数量和行人等待时间来确定红绿灯的切换时间,以提高行人通行效率。
通过实时监测行人数量和行人等待时间,该算法可以根据实际情况进行灵活调整,以确保行人安全和顺利通行。
1.引言在城市交通管理中,人行过街红绿灯系统起着至关重要的作用。
然而,传统的固定时间切换的红绿灯算法无法很好地适应不同交通流量和行人需求的变化。
本文介绍一种自助式人行过街红绿灯算法设计,该算法可以实时监测行人数量和行人等待时间,并根据实际情况进行灵活调整,以提高行人通行效率。
2.算法设计2.1数据采集为了实时监测行人数量和行人等待时间,需要使用传感器进行数据采集。
可以使用红外传感器、摄像头或其他相应的传感器来检测行人的到来和离开,以及计算行人等待时间。
2.2分析行人数量和行人等待时间通过采集到的数据可以得到当前过街口的行人数量和行人等待时间。
行人数量可以通过统计进出传感器的数量来获得,而行人等待时间可以根据行人到达时刻和行人离开时刻的时间差来计算。
2.3确定红绿灯的切换时间根据行人数量和行人等待时间的分析结果,可以确定红绿灯的切换时间。
当行人数量较多且行人等待时间较长时,红绿灯可以延长绿灯时间以提供更多通行时间给行人。
当行人数量较少或行人等待时间较短时,绿灯时间可以缩短以节省能源和提高交通效率。
3.算法实现为了实现自助式人行过街红绿灯算法,需要一个自动控制系统来监测数据并控制红绿灯的切换。
该系统可以通过嵌入式设备或计算机来实现。
首先,系统采集行人数量和行人等待时间的数据,并计算出相应的统计信息。
然后,系统根据统计信息来判断红绿灯的切换时间。
如果行人数量较多且行人等待时间较长,则绿灯时间延长;如果行人数量较少或行人等待时间较短,则绿灯时间缩短。
最后,系统控制红绿灯的切换,以确保行人安全和通行效率。
可以通过控制红绿灯的颜色来实现,例如将红灯时间减少或绿灯时间增加。
步行街道自助式交通灯控制器
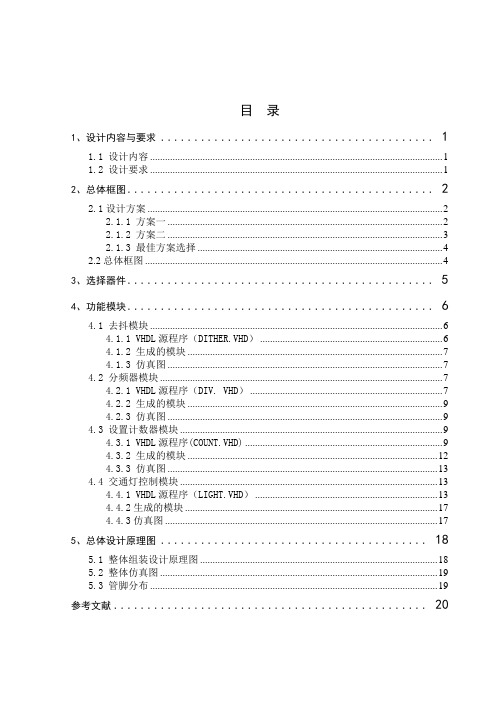
目录1、设计内容与要求 (1)1.1 设计内容 (1)1.2 设计要求 (1)2、总体框图 (2)2.1设计方案 (2)2.1.1 方案一 (2)2.1.2 方案二 (3)2.1.3 最佳方案选择 (4)2.2总体框图 (4)3、选择器件 (5)4、功能模块 (6)4.1 去抖模块 (6)4.1.1 VHDL源程序(DITHER.VHD) (6)4.1.2 生成的模块 (7)4.1.3 仿真图 (7)4.2 分频器模块 (7)4.2.1 VHDL源程序(DIV. VHD) (7)4.2.2 生成的模块 (9)4.2.3 仿真图 (9)4.3 设置计数器模块 (9)4.3.1 VHDL源程序(COUNT.VHD) (9)4.3.2 生成的模块 (12)4.3.3 仿真图 (13)4.4 交通灯控制模块 (13)4.4.1 VHDL源程序(LIGHT.VHD) (13)4.4.2生成的模块 (17)4.4.3仿真图 (17)5、总体设计原理图 (18)5.1 整体组装设计原理图 (18)5.2 整体仿真图 (19)5.3 管脚分布 (19)参考文献 (20)步行街道自助式交通灯控制器1、设计内容与要求1.1 设计内容设计一个步行街道上受行人控制的交通灯控制器,它要实现的功能如下:在没有行人要通过街道时,主干道保持通行。
若有行人要通过街道,按下按键,发出请求,数秒后,主干道禁行,行人可以通过。
用VHDL语言编辑程序,在Quartus II软件进行综合,生成相应的模块,然后连接各个模块,再综合、适配,下载到芯片,做最后的测试,看能否实现其功能,能否达到设计目标。
1.2 设计要求1.正常情况下保持主干道的畅通。
2.当步行街道上的行人要穿过主干道时,通过设置的按钮来发出请求。
3.当有人按下此按钮时,主干道变为黄灯,设置计数器计时时间为X秒。
4.X秒过后,主干道变为红灯,计数器继续计时(计时时间为Y秒),在Y秒内若有人再次按按钮,计数器不重新计时。
面向智能交通的智能红绿灯系统设计与实现
面向智能交通的智能红绿灯系统设计与实现智能红绿灯系统是现代智能交通系统中不可或缺的一部分,它可以有效地管理交通流量,提高道路安全性和通行效率。
本文将重点介绍面向智能交通的智能红绿灯系统的设计与实现。
智能交通系统是指利用先进的信息通信技术、传感器以及人工智能等技术,实现对交通流量、路况和车辆信息的实时监测、分析和管理的系统。
智能红绿灯系统作为智能交通系统的核心部分,其设计与实现显得尤为重要。
首先,智能红绿灯系统需要具备实时检测交通流量的能力。
通过安装在红绿灯上的摄像头、传感器等设备,可以获取道路上车辆的数量、车速以及车辆行驶方向等信息。
同时,还可以通过引入车牌识别技术,对交通流量进行精确统计和分析。
这些数据将成为调整红绿灯周期和信号灯配时的重要依据。
其次,智能红绿灯系统需要具备数据处理和决策分析的能力。
收集到的交通数据需要进行实时处理和分析,以得出合理的信号灯配时方案。
这需要借助于先进的人工智能算法和大数据技术,对交通流量进行建模和预测。
利用机器学习等技术,可以识别出交通拥堵区域,并根据实时的交通情况动态调整红绿灯周期,以减少交通堵塞。
另外,智能红绿灯系统还需要具备实时协同控制的能力。
针对交叉口的红绿灯系统,需要通过网络互联,实现交叉口之间红绿灯配时的协同控制。
当一个道路上车流量较大时,通过系统的协调,可以调整其他道路的红绿灯信号,优先引导交通流量,从而提高整个交通系统的效率。
在智能红绿灯系统的实现中,还可以考虑引入可视化界面和交互功能。
通过在红绿灯控制室的电脑终端上显示交通流量、红绿灯配时方案等信息,并提供人机交互界面,操作员可以根据实时的交通情况进行调整。
此外,还可以利用手机应用等方式,让驾驶员和行人能够实时获取红绿灯信息,为他们提供更便利的交通出行体验。
最后,智能红绿灯系统还需要考虑安全性和可靠性的问题。
由于交通事故可能对人身安全造成威胁,智能红绿灯系统需要具备高可靠性和故障容错能力。
系统的设计应考虑多重备份和冗余设计,以保证系统的稳定运行。
基于人工智能的智能马路交通灯设计与实现

基于人工智能的智能马路交通灯设计与实现智能马路交通灯是一种基于人工智能技术设计的新型交通信号灯系统,它能够通过传感器感知现场交通情况并根据交通流量、车速以及人行道行人进出等因素实现自适应的信号控制和绿灯优化,提高驾驶员和行人的通过效率和安全性,减少行车和人行的冲突和拥堵,减轻城市的能源消耗和污染排放。
一、智能交通灯的开发背景随着城市化进程的加速和汽车普及率的不断提高,人们在城市交通中面临的诸多问题也越来越突出。
在现有的传统交通信号控制系统中,常常存在信号周期固定、时段划分死板、控制方式单一等问题,导致在交通高峰期或特殊事件发生时,容易造成交通拥堵、事故增多、车辆排放污染等不良后果。
因此,我们需要一种更加智能化、自适应的交通信号系统,以适应日益变化的城市交通状况和人们不断提高的出行需求。
二、智能交通灯的主要技术方案智能交通灯主要是通过以下技术方案实现的:1.车辆识别技术。
通过引入车牌识别、车流量检测、车速监测等技术,在不同时段和路段实现自适应的信号控制。
例如,在车流量较大或车速较快的路口,绿灯时间可适当延长,以减少车辆排队等候的时间,并提高行车的效率。
2.行人识别技术。
通过行人进出口处设置传感器,检测行人通过情况并自适应调整信号灯控制。
例如,在路口旁边有大型商场、学校等,可以在放学、上下班高峰期间自动提高行人通行优先权,减少行人拥堵和意外事故。
3.智能控制算法。
利用数据挖掘、机器学习等人工智能技术,对不同交通流量状态进行分析、预测和优化,以实现最优化的交通信号控制。
例如,在节假日或大型活动期间,预测交通流量将会增大,智能交通灯会提前相应调整控制策略,以便更好地应对交通流量高峰。
三、智能交通灯的优势及应用前景智能交通灯相较于传统的固定信号灯系统,具有以下优势:1.自适应性强。
可根据实时交通情况和未来交通预测实现精准优化控制,减少盲目等待和重复通行情况。
2.信息交互性好。
可与车辆、行人等交通主体进行有效信息交互,如优化车辆行驶路线、提取行人道路网络等。
行人智慧过街系统设计方案
行人智慧过街系统设计方案为了提高行人的过街安全性和交通效率,设计一个行人智慧过街系统是非常重要的。
本文将提出一个行人智慧过街系统的设计方案,包括硬件和软件两个方面。
硬件设计:1. 摄像头:在每个人行横道路口的上方安装高清摄像头,用于监控行人过马路的情况。
2. 指示牌:在行人横道的两边设置指示牌,用于显示行人是否可以安全地过马路。
3. 传感器:在交通信号灯附近的路口设置地磁传感器,用于检测行人的实时位置。
4. 语音提示器:在交通信号灯旁安装语音提示器,用于直观地提醒行人何时可以过马路。
软件设计:1. 行人识别算法:使用计算机视觉技术,对摄像头拍摄到的行人进行实时识别和跟踪,以便系统了解行人的位置、行走方向和活动情况。
2. 交通控制算法:根据摄像头和传感器的数据,结合交通流量和行人密度等因素,自动控制交通信号灯的变化,以提高行人通过路口的效率和安全性。
3. 智能决策算法:根据行人的实时位置和交通流量,系统可以智能地决定何时向行人显示指示牌,并使用语音提示器提醒行人何时可以过马路。
4. 数据分析算法:对系统收集到的大量数据进行分析和挖掘,以便改进交通规划和提高行人过街的效率和安全性。
系统运行流程:1. 摄像头实时检测行人,获取行人的位置和行走方向。
2. 传感器检测行人的实时位置,发送给智能决策算法。
3. 智能决策算法根据行人的位置和交通流量,判断何时向行人显示指示牌和语音提示。
4. 交通控制算法根据行人的位置和交通流量,自动控制交通信号灯的变化,保证行人可以安全地过马路。
5. 数据分析算法对系统收集到的数据进行分析和挖掘,为优化交通规划提供数据支持。
优势和效果:1. 提高行人的过街安全性:系统可以及时发现行人,并根据实时情况做出合适的指示,保证行人安全过马路。
2. 提高交通效率:通过智能决策算法和交通控制算法,系统可以根据行人的位置和交通流量,自动控制交通信号灯,提高行人过街的效率。
3. 数据分析和挖掘:通过数据分析算法,系统可以收集和分析大量的行人和交通数据,为交通规划和优化提供数据支持,提高整体交通效率。
城市路段行人过街辅助系统设计

城市路段行人过街辅助系统设计1.系统概述:-介绍该系统的目的和功能,即帮助行人安全地过马路。
-强调该系统的智能化和自动化特点,包括使用传感器和摄像头等技术来监测行人和车辆的状况,以及自动控制交通信号灯。
2.系统硬件设计:-将传感器和摄像头安装在交通信号灯旁边或路边的杆子上,以便实时监测行人和车辆的情况。
-使用高分辨率摄像头,确保能够准确识别和追踪行人和车辆。
-配置音响设备,用于提醒行人安全过马路。
3.系统软件设计:-通过图像处理算法,对摄像头拍摄到的图像进行分析,识别行人和车辆,确定他们的位置和速度。
-根据分析结果,自动调整交通信号灯的时间和模式,以确保行人能够安全过马路。
-根据行人的位置和速度,计算并显示行人过马路的时间,方便行人做出准确的决策。
4.系统运行流程:-当没有行人或车辆时,系统处于待机状态,交通信号灯按照常规时间和模式运行。
-当传感器和摄像头检测到有行人靠近马路时,系统开始工作。
-系统通过图像处理算法确定行人和车辆的位置和速度,自动调整交通信号灯的时间和模式。
-系统通过音响设备提醒行人安全过马路。
-行人在设定的时间内过马路后,系统自动恢复到待机状态。
5.系统性能和安全性:-系统应具备高度准确性和可靠性,能够快速、准确地识别行人和车辆的状况,并做出合适的控制决策。
-系统应具备高度的自适应性,能够根据交通流量和行人数量动态调整交通信号灯的时间和模式。
-系统应具备安全性,确保行人和车辆的信息不被泄露,以及防止未经授权的人对系统进行非法操作。
6.系统优势和应用价值:-减少行人和车辆之间的交通事故,提高道路交通安全性。
-提高行人的过马路效率,缩短行人等待时间,提高出行效率。
-为城市道路交通规划提供数据支持,分析交通流量和行人流量,优化交通信号灯的布局和时长。
通过以上设计,城市路段行人过街辅助系统能够提供智能化和自动化的交通管理,提高行人的过马路安全性和效率,优化城市交通规划。
同时,这个系统也可以不断优化和改进,适应不同城市和路段的需求。
行人过街智慧系统设计方案
行人过街智慧系统设计方案行人过街智慧系统是一种智能交通技术,通过传感器、摄像头和人工智能算法等技术手段,为行人提供更安全、便捷的过街服务。
下面是一个1200字的行人过街智慧系统设计方案。
一、系统概述行人过街智慧系统旨在提供行人过街的时候更为智能、快捷、安全的服务。
系统主要由行人识别、智能信号灯和行人导航系统组成。
通过摄像头对行人进行实时监测和识别,智能信号灯能够根据行人数量和行人的移动方向实时调整交通信号,行人导航系统则提供具体的导航指引。
二、系统功能1. 行人识别:通过摄像头对行人进行实时监测和识别,可以精确地判断行人的数量、位置和移动方向。
2. 智能信号灯:智能信号灯根据行人数量和行人的移动方向实时调整交通信号,以提供最短的等待时间和最安全的过街环境。
3. 行人导航系统:行人导航系统根据行人的目的地和当前位置,提供具体的导航指引,以帮助行人快速、准确地到达目的地。
三、系统设计1. 硬件设施:系统需要安装摄像头、计算设备和信息显示设备。
摄像头用于监测行人的数量和移动方向,计算设备用于行人识别和信号灯调整,信息显示设备用于行人导航指引的展示。
2. 软件系统:系统需要开发行人识别算法、信号灯调整算法和行人导航算法。
行人识别算法通过图像处理和机器学习技术,实现对行人的实时监测和识别;信号灯调整算法通过行人数量和移动方向数据,实时调整交通信号;行人导航算法根据行人的目的地和当前位置,提供具体的导航指引。
3. 数据传输与通信:系统需要建立稳定的网络连接,以保证数据传输和通信的畅通。
摄像头通过网络传输监测到的行人数据到计算设备,计算设备根据行人数据实时调整信号灯,行人导航系统通过网络传输导航指引到信息显示设备。
四、系统运行流程1. 行人过街:当行人准备过街时,摄像头会监测到行人并传输数据到计算设备。
计算设备利用行人识别算法对行人进行识别,得到行人数量和移动方向的数据。
根据这些数据,计算设备调整智能信号灯,提供最短的等待时间和最安全的过街环境。
智慧人行过街系统设计方案
智慧人行过街系统设计方案设计方案:智慧人行过街系统一、项目背景人行过街是城市中不可或缺的一部分,如何优化人行过街的效率和安全性一直是城市交通规划的重要课题。
智慧人行过街系统通过运用现代科技手段,提升人行过街的便利性和安全性,为行人提供更好的过街体验。
本文将提出一种智慧人行过街系统的设计方案。
二、系统组成1. 检测装置:安装在人行过街路口的摄像头和传感器,用于检测行人和车辆的情况。
2. 控制中心:负责监控和管理系统运行情况,收集和处理来自检测装置的数据。
3. 信号灯控制器:根据检测装置和控制中心的指令,控制红绿灯的切换时间和方式。
4. 信息显示装置:通过LED显示屏、语音提示器等设备,向行人和车辆提供即时的交通信息和指示。
5. 数据分析与优化模块:对检测装置和控制中心收集的数据进行分析和优化,提供交通规划和决策支持。
三、系统运行流程1. 检测装置通过摄像头和传感器实时监测人行过街路口的行人和车辆情况,并将数据传输给控制中心。
2. 控制中心根据检测装置传来的数据,结合实时交通情况和预设的优化算法,生成最优的红绿灯切换策略,向信号灯控制器发送指令。
3. 信号灯控制器按照指令控制红绿灯的切换时间和方式,确保行人和车辆的安全通行。
4. 同时,信息显示装置通过LED显示屏、语音提示器等设备,向行人和车辆提供即时的交通信息和指示,提高过街的便利性和安全性。
5. 数据分析与优化模块定期对检测装置和控制中心的数据进行分析和优化,提供交通规划和决策支持,不断提升系统的性能。
四、特点和优势1. 智能优化:通过数据分析和优化算法,系统能够根据实时的交通情况和行人需求,生成最优的红绿灯切换策略,减少行人等待时间和交通堵塞。
2. 实时信息:通过信息显示装置,系统能够向行人和车辆提供即时的交通信息和指示,提高过街的便利性和安全性。
3. 数据支持:系统能够收集并处理大量的行人和车辆数据,可供交通规划和决策使用,提高城市交通管理的科学性和精准性。
智慧过街系统设计方案
智慧过街系统设计方案智能过街系统设计方案1.简介智能过街系统是一种集成了物联网、人工智能和信息技术的交通管理系统,旨在提高行人过街的安全性和便利性。
该系统通过感知、控制和通信技术,实现人车协同、自动化过街管理。
2.系统组成智能过街系统主要由以下几个组成部分构成:2.1 感知模块感知模块是系统的核心部分,通过各种传感器和摄像头,实时采集周围环境的信息,包括行人、车辆、道路状况等。
通过人脸识别技术,可以准确辨识行人,并记录其通行情况。
2.2 控制模块控制模块是实现智能过街的关键,根据感知模块采集到的信息,判断行人过街的状态,包括行人数量、行人的速度等。
根据这些信息,控制模块可以自动调整交通信号灯的时间和频率,以确保行人的安全过街。
2.3 通信模块通信模块负责将感知模块采集到的数据和控制模块的指令传输到远程控制中心。
同时,通信模块也接收中心下发的指令,比如更新交通信号灯的计划和调度。
2.4 远程控制中心远程控制中心是系统的管理和监控中心,可以监视整个智能过街系统的运行状态,并实时调整交通信号灯的计划和调度。
同时,远程控制中心还可以通过视频监控等手段实时监视过街情况,并对违规行为进行识别和记录。
3.系统工作流程3.1 数据采集感知模块通过传感器和摄像头采集周围环境的数据,包括行人、车辆和道路状况等。
3.2 数据处理控制模块对采集到的数据进行处理和分析,根据行人的数量和速度等信息判断行人过街的状态。
3.3 信号控制根据控制模块的分析结果,控制模块自动调整交通信号灯的时间和频率,确保行人的安全过街。
3.4 数据传输通信模块负责将采集到的数据和控制模块的指令传输到远程控制中心,同时接收中心下发的命令。
3.5 远程监控远程控制中心通过监视系统的运行状态和视频监控,实时监控过街情况,并对违规行为进行识别和记录。
4.优势和应用场景4.1 优势:(1) 提高了行人过街的安全性,减少了交通事故的发生。
(2) 提高了行人过街的便利性和效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要本设计是用STC89C52单片机控制的一个行人自助过街交通灯系统,实现机动车道由主机模块控制和人行横道由从机模块控制。
系统运行的各个时段的时间值通过主机的按键输入,然后通过JF24D-PA将主机设臵的时间值发送至从机,从而使主机和从机配合模拟显示交通灯系统;程序部分使用C语言编写,软件设计平台为Keil,经过仿真和电路组装调试,电路功能最终达到设计要求。
关键词单片机,交通灯,主机模块,从机模块,JF24D-PADesign and Realization ofPedestrian self-help crossing traffic light systemAbstractThis design is a Pedestrian self-help crossing traffic light system by the control of STC89C52 MCU, to achieve road vehicle controlled by the host module and the crosswalk controlled by the slave module. During each of the system operation time value through the key of host module input to, then through the JF24D - PA will sent the host module Settings time valule to the salve module ,so that the master and slave traffic light system with analog display. After simulation and circuit assembly debugging, the final circuit functions to meet the design requirements.Keywords MCU,traffic light,host module,slave module,JF24D-PA目录1.引言 (1)2.设计概述 (2)2.1.功能实现 (2)2.2 概要设计 (3)2.2.1主机模块 (3)2.2.2 从机模块 (3)3.硬件电路实现 (4)3.1 JF24D-PA简介 (4)3.2 主机模块 (4)3.2.1 主机模块用到的其它器件及作用 (5)3.2.2 主机模块硬件电路 (6)3.3 从机模块 (7)3.3.1 从机模块用到的其它器件及作用 (7)3.3.2 从机模块硬件电路 (8)4.软件系统设计 (9)4.1 主机模块中各程序功能及流程图 (9)4.1.1 主程序main.c (9)4.1.2 dat_treat.c (11)4.1.3 key.c (12)4.1.4 txd_rxd.c (13)4.1.5 send_display.c (14)4.1.6 eeprom.c (15)4.2 从机系统中各程序功能及流程图 (15)4.2.1 key.c (15)4.2.2 txd_rxd.c (15)5.调试 (16)6.结论 (17)致谢 (18)参考文献 (19)1.引言当前,城市交通问题对城市产生愈来愈大的压力,交通是城市的命脉。
建设一流的城市交通系统是促进城市经济和社会持续发展的基础条件,是增强城市综合竞争力的重要因素,也是提高城市居民生活质量的切实保障。
在世界各国,无论是发达国家还是发展中国家,城市交通都是一个突出的问题,它关系到城市的经济发展、生态环境和生活质量。
解决好城市的交通问题,不仅可以增强城市的可持续发展能力,促进城市的经济发展,而且可以有效地改善城市及周边地区的生态环境,切实提高城市居民的生活质量。
随着汽车工业的发展,城市机动化趋势不可阻挡,加之城镇化的迅速发展,人口规模不断扩大,这些因素将必然引发大量交通需求。
城市人性化交通能否持续发展,是决定城市能否持续发展的关键之一,城市人性化交通的可持续发展具有紧迫性与重要性。
国外在城市交通方面的研究较早,投入也多,目前已基本建成了综合、高效的立体化城市交通体系。
对于城市的交通结构,要从社会整体利益出发,运用法律和经济的手段,使居民的交通出行能按照自己的要求,有多种交通方式可供选择。
我国从改革开放以来,尽管城市化水平有了很大提高,但是起步较晚,投入很少,对人性化交通的理解也很肤浅同时也暴露出了很多交通方面的问题和隐患,例如,城市内高等级道路增长很快,但由于车辆的增长远远高于道路里程的增长,从而造成交通拥挤、堵塞。
还有一个原因就是行人和机动车之间的冲突。
在现代交通系统中,步行交通系统无论是作为满足人们日常生活需要的一种独立的交通方式,还是作为其他各种交通方式相互连续的桥梁和补充,都是其他方式无法替代的辅助系统。
人类的活动还不能完全离开步行这种本能交通,在城市里上班、购物等活动中步行还占有相当大的比重。
在此背景下,城市交通的人性化研究就成为了一个必要且紧迫的问题。
城市交通要向人性化方向发展,在进行城市交通规划时,除了要考虑车辆的方便性,还要考虑行人的方便性。
随着道路交通堵塞问题的日趋严重,除了改善道路设施之外,对交通进行合理的管理和调度也是重中之重。
单行道、各种交通灯的诞生都成了有效的措施,已经在国外不少大城市成熟运用的手动按钮行人信号灯近几年也陆续现身于国内各大城市的街头。
行人自助式过街交通信号灯的最大的好处就是让行人过街更安全,其工作原理是:行人按下路人按钮后,行人过街请求信号就会被传递到信号控制机上。
之后,信号控制机在适当的时间内做出反应,行人信号灯就会转换为绿灯。
在没有行人过街请求的情况下,机动车均可以通行。
这种信号灯适合在车辆流量相对较大、行人过马路流量少的地段使用,其优点是大大提高行车道使用率。
本设计是用STC89C52单片机设计的一个交通灯控制系统,控制行人过街的1交通路况。
机动车道由主机系统控制,人行横道由从机系统控制。
2.设计概述2.1.功能实现本设计为黄闪自助过街系统,其完成的主要功能如图2-1所示机动车灯色机动车倒计时人行灯色人行倒计时状态参数0-99秒可调秒可调机动车绿、绿闪、黄闪行人按钮(常开型,一次有效)第二步常态图2-1 黄闪自助过街系统功能系统工作时主要经历了几个阶段,为了便于下文的描述,我们用数字编号来表示各个阶段,其定义如下:第1阶段:当没有按下任何按钮时,机动车道处于黄灯闪烁状态,车辆可以通行;人行横道处于黑屏状态,行人禁止通行。
黄灯闪烁的频率可以通过按键来输入。
第2阶段:当“行人”按钮被按下时,机动车道经过了绿灯亮、绿灯闪、黄灯亮这几个状态,并且同时显示绿灯倒计时,绿灯的倒计时间值等于绿灯亮、绿灯闪、黄灯亮这三者的时间和;此时,人行横道则处于红灯亮的状态,并且显示红灯倒计时。
机动车可以通行,行人禁止通行。
其中绿灯亮、绿灯闪、黄灯亮的时间可以是0至99秒分别可调,用户可以通过按键输入。
第3阶段:机动车道经过了红灯亮、全红两个状态,机动车禁止通行,并且显示红灯倒计时,红灯的倒计时间值等于红灯亮的时间加上全红的时间。
人行横道则经过了绿灯亮、绿灯闪、全红三个状态,绿灯亮、绿灯闪时行人可以通行,全红时行人禁止通行,并且显示绿灯倒计时,绿灯的倒计时间值等于绿灯亮、绿灯闪、二者的时间和;全红时,倒计时显示屏处于黑屏状态。
其中绿灯亮、绿灯闪、全红的时间值同样是0至99秒分别可调,用户可以通过按键输入。
第4阶段:机动车道处于绿亮状态,机动车可以通行,倒计时显示屏处于黑屏状态;人行横道处于红亮状态,行人禁止通行,倒计时显示屏处于黑屏状态。
2此时“行人”按钮无效。
机动车道绿亮、人行横道红亮的时间值相等,也是0至99秒,通过程序输入。
第5阶段:若按钮有动作,则进入第2阶段,若按钮无动作状态保持0至99分可调,然后转至第1阶段。
2.2 概要设计为了便于描述,我们定义八个模式,其含义如表2-1所示表2-1 模式含义本设计主要分为两个模块,分别是主机模块和从机模块。
通过主机和从机不断的交互,发送信息和数据实现同步,来完成行人自助过街系统的设计。
2.2.1主机模块主机模块用来模拟机动车道的各种状态,主要功能是没有按下任何键时,处于黄灯闪烁状态;按下“设臵”健时,显示目前各个模式的显示时间值,以便于用户调整。
按下“确认”按钮后,将刚刚调整好的各个模式的时间值写入主机的EEPROM中,并且通过无线数据发送器件发送至从机模块,从而保证了主机模块和从机模块显示的一致性。
按下“路人”按钮后,主机模块就开始按照按键设定的各个模式的时间来模拟显示机动车道的交通状况。
2.2.2 从机模块从机模块用来模拟人行横道的各种状态,主要功能是当没有按下任何按键时,处于黑屏状态;当主机系统发送数据时,接收由主机系统传来的数据。
将主机系统设臵的各个模式的时间值,并写入从机的EEPROM中;按下主机模块按下“确定”按键时,从主机模块接收主机模块设臵的各个模式的时间值,当按下从机的“路人”按钮后,从机的就开始模拟显示人行横道的交通状况。
33.硬件电路实现本设计使用单片机STC89C52作为控制芯片,使用JF24D-PA完成无线数据和信息的发送和接收。
3.1 JF24D-PA简介JF24D-PA是由安阳市新世纪电子研究所有限公司最新开发的一款2.4G远距离数传模块,模块内含可编程的MCU和JF24D芯片及功率放大,内含最基本的寄存器配制和测试程序,可以直接用来做串口数据收发。
也可以对模块程序进行修改开发。
体积小巧,功能完善,模块配带2.4G橡胶天线。
配3db天线在马路有效距离约600米;配5-7db天线有效距离约800-1000米左右。
JF24D-PA提供了简单易用的硬件接口功能,可以将模块用2.54mm脚距的排针焊在主板上,可方便的与232接口实现串口数据传输。
同时JF24D-PA也提供了简单易懂的傻瓜软件包下载及技术支持,客户不需要再为复杂的寄存器配制而浪费时间和精力,这样可以缩短2.4G产品的应用研发周期,降低开发难度,节约研发成本。
JF24D-PA是一款简单实用的功能模块,硬件预留8个基本功能引脚,在模块的AINI脚接一个按键开关到地即可以测试模块的收发性能。
RX和TX可以直接传输数据。
程序代码可以重新下载修改。
JF24D-PA的引脚如图3-1所示。
图3-1 JF24D-PA的引脚3.2 主机模块主机模块中通过各个按键来设臵各个阶段各个模式的时间值,设臵好以后,通过数据传送器件JF24D-PA,将主机模块的各个模式的时间值发送至从机模块,4按下“行人”按钮时,和从机相互配合同步显示机动车道的信息。