LUST 变桨系统旁路限位开关超时故障分析
变桨控制器报系统故障停机
变桨控制器报系统故障停机
故障原因分析及处理方法:
1、轮毂主控故障,变桨控制器损坏或死机,需对变桨控制器进行更换或塔基断电复位。
2、通讯滑环磨损严重、烧坏或碳粉堆积过多,需更换通讯滑环或清洗通讯滑环。
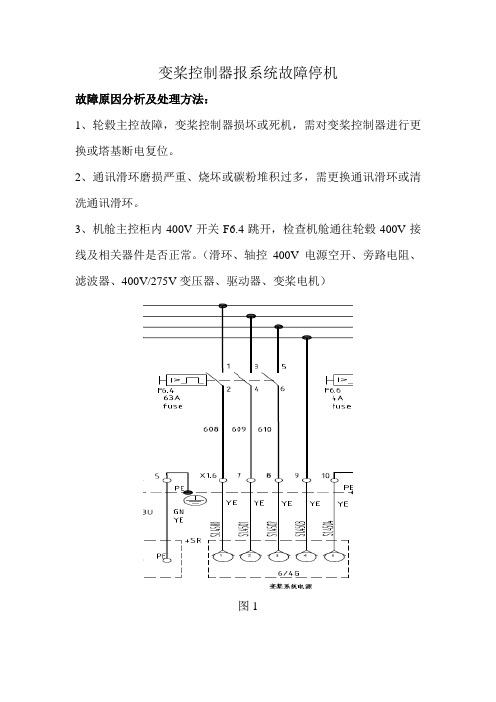
3、机舱主控柜内400V开关F6.4跳开,检查机舱通往轮毂400V接线及相关器件是否正常。
(滑环、轴控400V电源空开、旁路电阻、滤波器、400V/275V变压器、驱动器、变桨电机)
图1
图2
4、变桨主电源、转速OK信号、旁路限位开关信号接线松动,造成
轮毂送往主控24VDC信号中断报此故障;此时需检查上述相关接线是否松动并紧固。
图4
5、桨叶变桨电机或A编码器故障引起;由于A编码器、变桨电机机械性能损坏或卡涩,造成与轮毂主控变桨信号不能同步,从而报此故障,需更换故障变桨电机或A编码器并对其角度清92度。
6、轮毂电池充电器损坏或死机使充电器给轮毂主控信号报错;还可引起变桨电池不能正常充电造成电池欠压引起变桨系统故障报错,此时需检查电池充电器或对其进行断电重启后观察是否完好,若确定为充电器损坏则需要更换相关损坏器件,待电池电压恢复后启机。
7、由于变桨驱动器故障引起;变桨驱动器内部元件损坏影响驱动器给变桨电机的电流整定值,使变桨主控制器正常变桨信号接收而报此
故障。
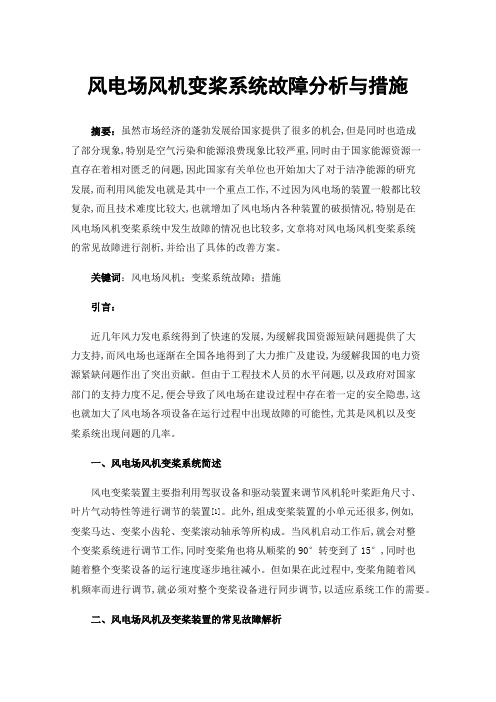
风电场风机变桨系统故障分析与措施
风电场风机变桨系统故障分析与措施摘要:随着我国社会经济的发展,风力发电作为新能源利用的典范,近年来得到了迅速的发展,但是由于风电场设备相对复杂,因此风电场各项设备抗损坏能力较差,特别是风电场风机变桨系统的故障就是一个表现突出的问题。
本文对风力发电电动变桨和液压变桨常见故障进行了分析,并给出了解决问题的意见和建议。
关键词:风电场风机;系统故障;分析与措施引言我国社会经济的快速发展对于电力的生产提出了较高的要求,在传统能源相对不足的背景下,风电场的电力的生产可以满足社会对电力资源的需求,这也给风机变桨系统的安全正常运行带来了较大的压力。
1.风电场风机电动变桨系统常见的故障分析与处理(一)故障分析1.变桨电滑环故障分析在风力发电中,无论是风速过大还是过小,都会对供电机的工作产生不利的影响,但是我们使用变桨滑环之后,就能够通过信号指令让桨叶自动调整,使得桨叶不稳定的问题得到了很好的解决。
但实际具体操作中,风机变桨是在轮毂不间断旋转的情况下实行的,系统在离心力和交变负载的影响下,各个部件都承受了较大的脉动负荷,这就大大提高了故障的发生概率,常见的故障诸如接线不牢固和接触不良等问题。
2.后备电源故障分析后备电源在具体的运用中,也会出现一些不容忽视的问题,从而导致在风机控制系统紧急情况下不能正常的工作。
风机控制系统后备电源主要有铅酸蓄电池和超级电容两种形式,因为风电系统工作在恶劣的环境中,温度和湿度变化较大,外界的这些因素会对电池寿命和性能产生较大的影响,严重的还会造成蓄电池释放能效降低,这样一旦系统出现故障,后备电源的作用也无法发挥出来,从而造成整个设备陷入瘫痪。
3.变桨电气回路故障分析变频装置控制器是桨叶驱动程序运行的基础,如果变频装置损坏、电机运行功率不达标和接线不牢固,变桨电气回路就会发生故障,控制器出现故障时,主要表现为内部电气元件损坏失失效,关触点接触不良、控制器的输出信号不正常,当整个系统出现故障时,就会造成桨叶停止运行。
故障处理手册(LUST变桨)
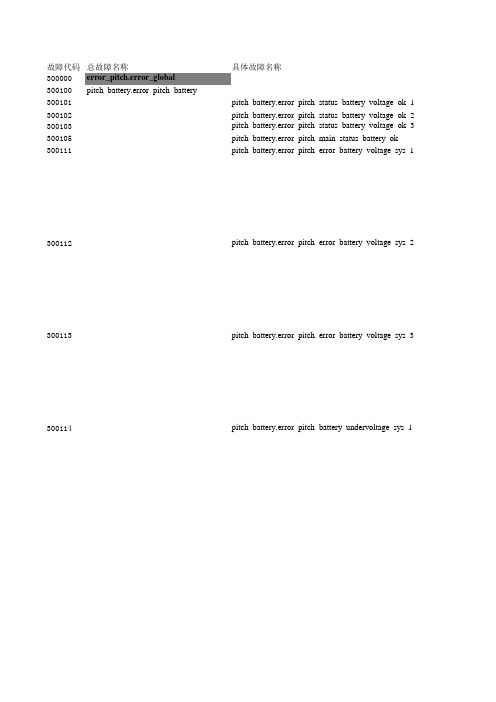
故障代码总故障名称具体故障名称300000error_pitch.error_global300100pitch_battery.error_pitch_battery300101pitch_battery.error_pitch_status_battery_voltage_ok_1 300102pitch_battery.error_pitch_status_battery_voltage_ok_2 300103pitch_battery.error_pitch_status_battery_voltage_ok_3 300105pitch_battery.error_pitch_main_status_battery_ok 300111pitch_battery.error_pitch_error_battery_voltage_sys_1300112pitch_battery.error_pitch_error_battery_voltage_sys_2300113pitch_battery.error_pitch_error_battery_voltage_sys_3300114pitch_battery.error_pitch_battery_undervoltage_sys_1300115pitch_battery.error_pitch_battery_undervoltage_sys_2300116pitch_battery.error_pitch_battery_undervoltage_sys_3300120pitch_battery.error_battery_charger300121pitch_battery.error_pitch_battery_charger_circuit_breaker_tripped_1 300122pitch_battery.error_pitch_battery_charger_circuit_breaker_tripped_2 300123pitch_battery.error_pitch_battery_charger_circuit_breaker_tripped_3 300124pitch_battery.error_pitch_battery_charger_error_bit0_sys_1 300125pitch_battery.error_pitch_battery_charger_error_bit0_sys_2300126pitch_battery.error_pitch_battery_charger_error_bit0_sys_3 300127pitch_battery.error_pitch_battery_charger_error_bit1_sys_1 300128pitch_battery.error_pitch_battery_charger_error_bit1_sys_2 300129pitch_battery.error_pitch_battery_charger_error_bit1_sys_3300130pitch_battery.error_pitch_error_pilot_contact_sys 300131pitch_battery.error_pitch_error_pilot_contact_sys_1300132pitch_battery.error_pitch_error_pilot_contact_sys_2 300133pitch_battery.error_pitch_error_pilot_contact_sys_3300140pitch_battery.error_pitch_battbox_temperature 300141pitch_battery.error_pitch_battbox_temperature_1300142pitch_battery.error_pitch_battbox_temperature_2 300143pitch_battery.error_pitch_battbox_temperature_3300150pitch_battery.error_pitch_battery_operation_signal 300200pitch_com.error_pitch_com300201pitch_com.error_pitch_com_heartbeat300210pitch_com.error_pitch_error_can300211pitch_com.error_pitch_error_can_node_1300212pitch_com.error_pitch_error_can_node_2300213pitch_com.error_pitch_error_can_node_3300214pitch_com.error_pitch_error_can_node_4300215pitch_com.error_pitch_error_can_node_5300216pitch_com.error_pitch_error_can_node_6300217pitch_com.error_pitch_error_can_global300220pitch_com.error_pitch_error_profibus300300pitch_converter.error_pitch_converter300311pitch_converter.error_pitch_conv_general_drive_error_sys_1 300312pitch_converter.error_pitch_conv_general_drive_error_sys_2 300313pitch_converter.error_pitch_conv_general_drive_error_sys_3 300321pitch_converter.error_pitch_conv_overcurrent_error_sys_1300322pitch_converter.error_pitch_conv_overcurrent_error_sys_2300323pitch_converter.error_pitch_conv_overcurrent_error_sys_3300324pitch_converter.error_pitch_conv_overcurrent_rms_motor_error_sys_1 300325pitch_converter.error_pitch_conv_overcurrent_rms_motor_error_sys_2 300326pitch_converter.error_pitch_conv_overcurrent_rms_motor_error_sys_3 300327pitch_converter.error_pitch_conv_overcurrent_conv_error_sys_1300328pitch_converter.error_pitch_conv_overcurrent_conv_error_sys_2300329pitch_converter.error_pitch_conv_overcurrent_conv_error_sys_3300341pitch_converter.error_pitch_conv_overvoltage_dc_link_error_sys_1300342pitch_converter.error_pitch_conv_overvoltage_dc_link_error_sys_2300343pitch_converter.error_pitch_conv_overvoltage_dc_link_error_sys_3300344pitch_converter.error_pitch_warning_voltage_dc_too_low_1300345pitch_converter.error_pitch_warning_voltage_dc_too_low_2300346pitch_converter.error_pitch_warning_voltage_dc_too_low_3300347pitch_converter.error_pitch_error_inverter_dc_fuse_sys_1300348pitch_converter.error_pitch_error_inverter_dc_fuse_sys_2300349pitch_converter.error_pitch_error_inverter_dc_fuse_sys_3300350pitch_converter.error_pitch_inside_fi_temperature 300351pitch_converter.error_pitch_inside_fi_temperature_1300352pitch_converter.error_pitch_inside_fi_temperature_2300353pitch_converter.error_pitch_inside_fi_temperature_3300360pitch_converter.error_pitch_conv_temp_sensor_motor_short_circuit_sys300361pitch_converter.error_pitch_conv_temp_sensor_motor_short_circuit_sys_1 300362pitch_converter.error_pitch_conv_temp_sensor_motor_short_circuit_sys_2300363pitch_converter.error_pitch_conv_temp_sensor_motor_short_circuit_sys_3300370pitch_converter.error_pitch_conv_heatsink_temperature 300374pitch_converter.error_pitch_conv_overtemperature_heatsink_error_sys_1300375pitch_converter.error_pitch_conv_overtemperature_heatsink_error_sys_2300376pitch_converter.error_pitch_conv_overtemperature_heatsink_error_sys_3300381pitch_converter.error_pitch_conv_parallel_field_missing_error_sys_1300382pitch_converter.error_pitch_conv_parallel_field_missing_error_sys_2300383pitch_converter.error_pitch_conv_parallel_field_missing_error_sys_3300384pitch_converter.error_pitch_conv_can_modul_error_sys_1 300385pitch_converter.error_pitch_conv_can_modul_error_sys_2 300386pitch_converter.error_pitch_conv_can_modul_error_sys_3 300391pitch_converter.error_pitch_conv_ssi_wire_error_sys_1 300392pitch_converter.error_pitch_conv_ssi_wire_error_sys_2 300393pitch_converter.error_pitch_conv_ssi_wire_error_sys_3 300394pitch_converter.error_pitch_conv_resolver_wire_error_sys_1 300395pitch_converter.error_pitch_conv_resolver_wire_error_sys_2 300396pitch_converter.error_pitch_conv_resolver_wire_error_sys_3300400pitch_fan_heater.error_pitch_fan_or_heater_error_sys300401pitch_fan_heater.error_pitch_fan_or_heater_error_sys_1300402pitch_fan_heater.error_pitch_fan_or_heater_error_sys_2300403pitch_fan_heater.error_pitch_fan_or_heater_error_sys_3300500pitch_motor.error_pitch_motor300510pitch_motor.error_pitch_motor_temperature_limit 300511pitch_motor.error_pitch_motor_temperature_1 300512pitch_motor.error_pitch_motor_temperature_2 300513pitch_motor.error_pitch_motor_temperature_3 300600pitch_position.error_pitch_position300611pitch_position.error_pitch_status_limit_switches_ok_1 300612pitch_position.error_pitch_status_limit_switches_ok_2 300613pitch_position.error_pitch_status_limit_switches_ok_3 300621pitch_position.error_pitch_status_limit_switch91_ok_1300622pitch_position.error_pitch_status_limit_switch91_ok_2300623pitch_position.error_pitch_status_limit_switch91_ok_3300631pitch_position.error_pitch_status_limit_switch96_ok_1300632pitch_position.error_pitch_status_limit_switch96_ok_2 300633pitch_position.error_pitch_status_limit_switch96_ok_3 300640pitch_position.error_pitch_error_encoder_incoherence_sys300641pitch_position.error_pitch_warning_position_incoherence_1 300642pitch_position.error_pitch_warning_position_incoherence_2 300643pitch_position.error_pitch_warning_position_incoherence_3 300650pitch_position.error_pitch_error_encoder_incoherence_main_signal 300651pitch_position.error_pitch_error_encoder_incoherence_sys_1300652pitch_position.error_pitch_error_encoder_incoherence_sys_2300653pitch_position.error_pitch_error_encoder_incoherence_sys_3300670pitch_position.error_pitch_position_cmp300680pitch_position.error_pitch_position_setpoint_difference 300681pitch_position.error_pitch_position_setpoint_difference_1300682pitch_position.error_pitch_position_setpoint_difference_2300683pitch_position.error_pitch_position_setpoint_difference_3300700pitch_status.error_pitch_status300705pitch_status.error_pitch_status_in_maintenance300709pitch_status.error_main_loop_mode_group_run_stop_em 300800pitch_supply.error_pitch_supply300801pitch_supply.error_pitch_error_contr_voltage_fuse_tripped_1300802pitch_supply.error_pitch_error_contr_voltage_fuse_tripped_2300803pitch_supply.error_pitch_error_contr_voltage_fuse_tripped_3 300810pitch_supply.error_pitch_main_supply_no_recover_after_eon无法变桨故障描述及分析变桨系统故障变桨蓄电池故障桨叶1蓄电池过压或欠压故障桨叶2蓄电池过压或欠压故障桨叶3蓄电池过压或欠压故障桨叶蓄电池状态故障9U2检测桨叶1的蓄电池电压高于265V;9U2供电回路问题;9U2输出回路问题;9U2自身故障。
风电变桨系统故障
• 4)变桨电机后部电源线或接近开关线松动, 4)变桨电机后部电源线或接近开关线松动,
长时间摩擦造成接触不良,导致电机接触 不良或者无法感应到桨叶位置而报故障。 处理方式重新更换磨损线路。 5)变桨控制柜整流桥损坏。也会导致变 桨故障。处理方式更换整流桥。 四、注意事项 1)电机温度过高,一般多次变桨后电机温 1)电机温度过高,一般多次变桨后电机温 度会升高,不要强行继续变桨。会对电机 造成伤害。 断电后控制面板所报的桨叶位置会自动归 断电后控制面板所报的桨叶位置会自动归 零。
二、故障原因:接触不良导致频
繁虚报故障。
• 2)变桨电机功率不足 • 有些情况下打开制动器,是卡住桨叶偏过
2点位置便可变桨,若如电机功率再增大 会减少此类故障。 • 3)接近开关松动或者倾斜,无法正常反 射。
• 4)新投机组存在未知故障待运行一段时间,故 • • • •
• • • •
• 变桨故障不是一个纯粹的机械或者电器问
技术直流变桨电机常见故障分析及主动维护技术方案
技术直流变桨电机常见故障分析及主动维护技术方案直流变桨电机常见故障分析及主动维护技术方案北京合信锐风新能源有限公司文:李金龙(技术部部长)在大型风力发电机组中,直流变桨系统在系统出现故障时,可以利用直流备电进行紧急顺桨,提供高可靠性紧急停机保护,得到了不少变桨系统厂家的青睐。
在早期的1.5MW风力机组中,LUST变桨(MOOG)、SSB变桨、能建变桨均采用直流变桨电机。
随着运行年限的增加,诸多风电场直流变桨系统出现故障频发问题,给运行维护带来很多不便,增加了运维成本。
下面结合我公司变桨系统主动维护案例经验,介绍直流变桨电机维护注意事项:1、直流变桨系统原理介绍直流电机的结构应由定子和转子两大部分组成。
直流电机运行时静止不动的部分称为定子,定子的主要作用是产生磁场,由机座、主磁极、换向极、端盖、轴承和电刷装置等组成。
运行时转动的部分称为转子,其主要作用是产生电磁转矩和感应电动势,是直流电机进行能量转换的枢纽,所以通常又称为电枢,由转轴、电枢铁心、电枢绕组、换向器和风扇等组成。
图1-1:直流电机结构图直流电动机的工作原理就是靠换向器配合电刷的换向作用,使之从电刷端引入的直流电动势,在电枢线圈产生交变电动势,从而产生旋转电磁转矩。
2、直流电机常见技术问题(1)换向器打火正常情况下电刷与换向器之间为“滑触”结构,在换相时会产生轻微电火花,不会对设备产生危害。
如果换向器表面严重磨损,电刷磨损形成严重积碳,刷握压力异常,电刷位置不在物理中行线上等异常状态时,将引起严重电火花,造成换向器进一步损坏,严重情况下引起换向器绝缘击穿损坏,造成整个电机损坏。
图2-1 换向器放电示意图(2)电枢绕组击穿电枢绕组、励磁绕发生绕组短路击穿,绕组烧毁故障。
通过对电机拆机发现,这种绕组烧毁情况,一般由于电机长期过载高温,引起绕组绝缘层损坏。
电机过载原因包括电磁刹车不能正常打开,变桨系统机械卡死等故障。
图2-2 励磁绕组绝缘击穿图(3)其他故障在变桨系统中报出速度比较、速度超限故障,一般为测速电机或测速编码器损坏,测速电机与测速编码器器都是高精度电子器件,运行中需要注意对harting插头,以及编码器密封圈进行紧固与检查,保证接触可靠。
变桨速度超过限值故障讲解材料
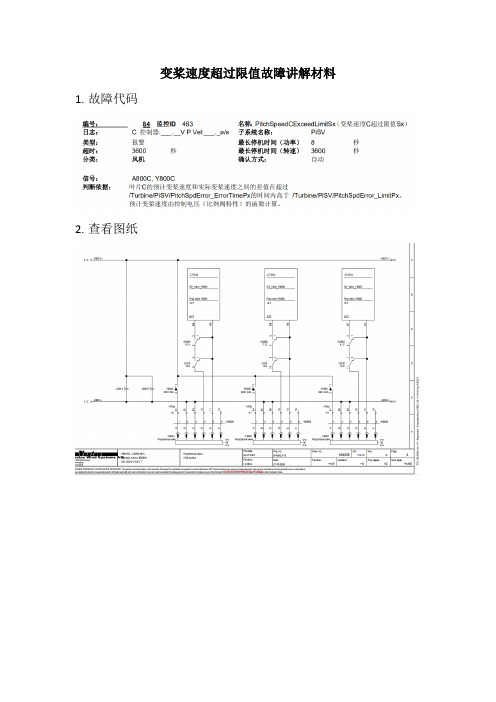
变桨速度超过限值故障讲解材料1.故障代码
2.查看图纸
3.故障原因分析
①变桨比例阀故障;
②叶片位置传感器故障;
③桨叶轴承卡滞;
④桨叶变桨阀块有不正确动作电磁阀。
4.工具的准备:
偏口钳子、尖嘴钳子、绑扎带(小)、工作灯、工具包、吸油纸、万用表、绝缘胶带、大、小一字各一把、巴勒夫调节器、小棘轮盒1套。
5.处理方法
第一步:打就地,停机,进服务。
第二部:登机,断开Q15、Q7断路器。
第三部:查找故障原因,确定具体原因后,更换相应备件。
1、变桨测试,观察桨叶轴承运行是否流畅。
2、变桨测试,观察位置传感器电压是否合要求。
3、检查各电磁阀是否正确动作。
注意事项:
1、工作前,验明工作地点,及各设备确无电压。
2、工作结束后,复位故障日志及警告日志。
第四步:收拾工具,清理现场,仔细核对工具数量,切勿遗留工具和其他杂物。
第五部:风机恢复安全措施,复位试运行。
变桨系统故障分析

变桨系统故障分析首先,机械故障是变桨系统故障的主要原因之一、由于变桨机构是一个复杂的机械系统,其运行过程中受到很大的应力和振动,如果组装不当或者部件磨损,就会导致故障。
例如,螺旋桨的轴承可能会因为长时间运行而磨损,从而导致桨叶无法正常旋转;桨叶的连接部分也可能会因为螺丝松动或者断裂而导致故障。
其次,电气故障也是变桨系统故障的常见原因。
电气故障可以包括电缆损坏、插头松动、电机过热等问题。
这些故障可以导致电能无法正常传输或者电动机无法启动,从而影响桨叶的运行。
此外,由于变桨系统中涉及到的电气设备众多,电缆连接错误或者接触不良也可能导致故障。
最后,控制系统故障也是变桨系统故障的一个重要原因。
现代风能发电系统中都配备了先进的控制系统,这些控制系统能够调整桨叶的角度以适应不同的风速和方向。
然而,如果控制系统出现故障,就会导致桨叶无法及时调整角度。
例如,控制系统中的传感器可能出现故障,导致无法准确感知风速和方向,从而不能正确地控制桨叶的运动。
针对变桨系统故障,我们可以采取以下措施来进行分析和解决:首先,可以通过检查和维护机械部件来排除机械故障的可能性。
例如,定期检查轴承的磨损情况,更换磨损部件,确保变桨机构的正常运转。
其次,对电气部件进行定期检查和维护,防止电气故障发生。
例如,检查和清洁电缆,确保连接牢固;定期检查电机的温度,防止过热等问题。
最后,对控制系统进行检查和维护,确保其正常工作。
例如,定期检查传感器的准确性,确保其能够准确感知风速和方向;检查控制系统的软件程序,确保其无错误。
总之,变桨系统故障是风能发电系统中常见的问题,其原因可能是机械故障、电气故障和控制系统故障等。
通过定期检查和维护机械、电气和控制系统,我们可以及时发现故障并采取相应的措施进行修复,以确保风能发电系统的正常运行。
风电场风机变桨系统故障分析及具体措施

风电场风机变桨系统故障分析及具体措施摘要:风力发电作为现阶段电力能源供应系统的重要构成,发电机组通常需要在复杂的环境下运行,风向、风速、风力与温度环境等容易受不确定因素影响,具有随机性、多变性与间歇性等方面的特点,风机系统在交变负载的影响下,容易出现故障问题。
变桨系统是风力发电的重要技术,分为液压变桨与电动变桨等形式,液压变桨系统的常见问题包括超限故障、不同步故障等;电动变桨运行系统主要的故障问题为电气回路、变桨电滑环以及后备电源等出现损坏,技术与管理人员应结合具体故障原因,采取针对性的处理手段。
关键词:超限故障;运行不同步;电气回路现阶段,我国能源消耗量逐步提高,风电场的电力生产与供应需求不断提升,风机系统的运行压力大幅度增加,为保证电力运行系统的安全、稳定运行,风电场应在加强变桨系统状态监测的基础上,做好故障排查与处理工作。
由于变桨系统处于封闭的环境中,因此在运行监测时,故障表现不明显,需要通过总控制系统对系统运行异常数据进行报错,检测与维修技术难度相对较大。
基于此,本文从现阶段液压与电动变桨系统的常见故障表现与原因方面出发,对不同故障问题处理对策进行系统分析。
一、液压电机变桨系统中的主要故障及处理对策1、变桨系统超限故障情况的分析与处理液压变桨在运行过程中容易出现超限故障,最常见故障点为桨叶位置传感器损坏,造成测量电压超出允许值范围,从而造成叶片位置检测错误。
一旦桨叶位置的传感器出现损坏情况,传感器会发出超过正常标准的电压信号,信号传输到伺服系统中,反馈到主控制平台,平台根据故障信息报出超限情况。
桨叶的位置传感装置是控制变桨系统的重要装置,如果装置出现故障,不仅会增加实际变桨角度与理论角度的误差值,还会在一定程度上降低风机运行质效,降低系统发电的稳定性。
在进行故障检测与处理的过程中,应先利用程序控制功能对位置传感器进行状态检测,将桨叶的角度数据转换为可测量的电压信号。
若不在正常范围内,通过桨叶位置传感器配套调整工具,将桨叶角度正负极限值调至规定电压范围。
风电场风机变桨系统故障分析与措施
风电场风机变桨系统故障分析与措施摘要:虽然市场经济的蓬勃发展给国家提供了很多的机会,但是同时也造成了部分现象,特别是空气污染和能源浪费现象比较严重,同时由于国家能源资源一直存在着相对匮乏的问题,因此国家有关单位也开始加大了对于洁净能源的研究发展,而利用风能发电就是其中一个重点工作,不过因为风电场的装置一般都比较复杂,而且技术难度比较大,也就增加了风电场内各种装置的破损情况,特别是在风电场风机变桨系统中发生故障的情况也比较多,文章将对风电场风机变桨系统的常见故障进行剖析,并给出了具体的改善方案。
关键词:风电场风机;变桨系统故障;措施引言:近几年风力发电系统得到了快速的发展,为缓解我国资源短缺问题提供了大力支持,而风电场也逐渐在全国各地得到了大力推广及建设,为缓解我国的电力资源紧缺问题作出了突出贡献。
但由于工程技术人员的水平问题,以及政府对国家部门的支持力度不足,便会导致了风电场在建设过程中存在着一定的安全隐患,这也就加大了风电场各项设备在运行过程中出现故障的可能性,尤其是风机以及变桨系统出现问题的几率。
一、风电场风机变桨系统简述风电变桨装置主要指利用驾驭设备和驱动装置来调节风机轮叶桨距角尺寸、叶片气动特性等进行调节的装置[1]。
此外,组成变桨装置的小单元还很多,例如,变桨马达、变桨小齿轮、变桨滚动轴承等所构成。
当风机启动工作后,就会对整个变桨系统进行调节工作,同时变桨角也将从顺桨的90°转变到了15°,同时也随着整个变桨设备的运行速度逐步地往减小。
但如果在此过程中,变桨角随着风机频率而进行调节,就必须对整个变桨设备进行同步调节,以适应系统工作的需要。
二、风电场风机及变桨装置的常见故障解析(一)变频器问题电机在风机变桨过程中主要通过控制变桨电机的速度,以便调节其转速达到整个系统工作的需要,使其所产生的能耗减至最低,也能够通过控制电机的转速而达到节能减排的效果,同时还可以进行恒压、恒流的控制。
风电场风机变桨系统故障分析及具体措施
风电场风机变桨系统故障分析及具体措施摘要:风力发电作为现阶段电力能源供应系统的重要构成,发电机组通常需要在复杂的环境下运行,风向、风速、风力与温度环境等容易受不确定因素影响,具有随机性、多变性与间歇性等方面的特点,风机系统在交变负载的影响下,容易出现故障问题。
变桨系统是风力发电的重要技术,分为液压变桨与电动变桨等形式,液压变桨系统的常见问题包括超限故障、不同步故障等;电动变桨运行系统主要的故障问题为电气回路、变桨电滑环以及后备电源等出现损坏,技术与管理人员应结合具体故障原因,采取针对性的处理手段。
关键词:超限故障;运行不同步;电气回路现阶段,我国能源消耗量逐步提高,风电场的电力生产与供应需求不断提升,风机系统的运行压力大幅度增加,为保证电力运行系统的安全、稳定运行,风电场应在加强变桨系统状态监测的基础上,做好故障排查与处理工作。
由于变桨系统处于封闭的环境中,因此在运行监测时,故障表现不明显,需要通过总控制系统对系统运行异常数据进行报错,检测与维修技术难度相对较大。
基于此,本文从现阶段液压与电动变桨系统的常见故障表现与原因方面出发,对不同故障问题处理对策进行系统分析。
一、液压电机变桨系统中的主要故障及处理对策1、变桨系统超限故障情况的分析与处理液压变桨在运行过程中容易出现超限故障,最常见故障点为桨叶位置传感器损坏,造成测量电压超出允许值范围,从而造成叶片位置检测错误。
一旦桨叶位置的传感器出现损坏情况,传感器会发出超过正常标准的电压信号,信号传输到伺服系统中,反馈到主控制平台,平台根据故障信息报出超限情况。
桨叶的位置传感装置是控制变桨系统的重要装置,如果装置出现故障,不仅会增加实际变桨角度与理论角度的误差值,还会在一定程度上降低风机运行质效,降低系统发电的稳定性。
在进行故障检测与处理的过程中,应先利用程序控制功能对位置传感器进行状态检测,将桨叶的角度数据转换为可测量的电压信号。
若不在正常范围内,通过桨叶位置传感器配套调整工具,将桨叶角度正负极限值调至规定电压范围。
变桨技术及故障分析

Motor
华润新能源控股有限公司
華潤新能源
变桨技术概述
电动变桨技术
液压变桨技术
常见故障分析
2.5 柜体组成方案
◆柜体组成划分
风机主控 制器
控制器和配电系统
伺服驱动柜
伺服驱动柜
伺服驱动柜
电池装置
电池装置
电池装置
轴1
柜体方案 3柜 4柜 轴1 电池+驱动器+电源变换 电池+驱动器 轴2 电池+驱动器+电池充电器 电池+驱动器
否
X5-16 X5-17 X5-18 X5-19 X5-20 X5-21 X5-22 X5-15
频率范围< 500Hz 端子扫描周期1ms 低/高电平切换:<4.8V/>18V At 24V typ. 3mA
X5-23 X5-24
继电器1常开 30V / AC, cosΦ=1 30V / AC, cosΦ=1 关延时约10ms 周期1ms
复合项目部提供叶 片在各种风况下相 关载荷数据(额定 和峰值载荷)
整体所提出风机功 率(1.5MW、2.0MW、或 3.0WM)需求
确定回转支承的额定 力矩和峰值力矩
传动链的 减速比
正常变 桨速度
驱动器的功能 及I/O数量
选定变桨控制器
外围控制I/O 数量
选定相应规格 驱动器型号
确定变桨电机的具 体型号(功率和转 速)
电机刹车制动时间:
电机最大功率(0.5s)
88
64
主电压 直流电压
230…460 From 140
6 7 8
化学活性物 盐分 机械活性物 沙 极限速度和力矩 速度: 力矩:
风电机组变桨系统故障分析处理及应用
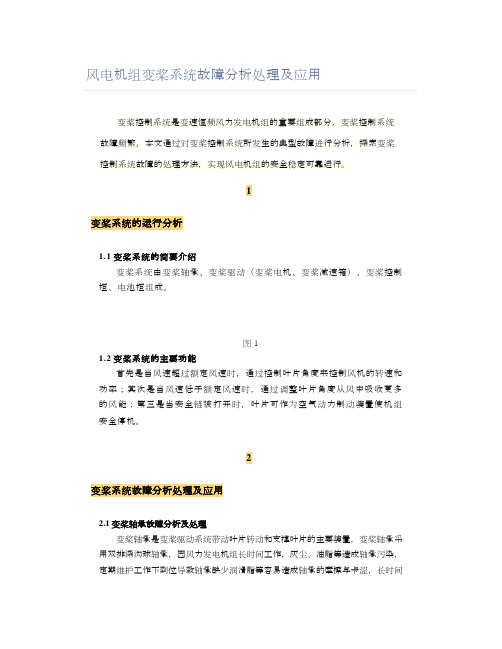
风电机组变桨系统故障分析处理及应用变桨控制系统是变速恒频风力发电机组的重要组成部分,变桨控制系统故障频繁,本文通过对变桨控制系统所发生的典型故障进行分析,探索变桨控制系统故障的处理方法,实现风电机组的安全稳定可靠运行。
1变桨系统的运行分析1.1变桨系统的简要介绍变桨系统由变桨轴承、变桨驱动(变桨电机、变桨减速箱)、变桨控制柜、电池柜组成。
图11.2变桨系统的主要功能首先是当风速超过额定风速时,通过控制叶片角度来控制风机的转速和功率;其次是当风速低于额定风速时,通过调整叶片角度从风中吸收更多的风能;第三是当安全链被打开时,叶片可作为空气动力制动装置使机组安全停机。
2变桨系统故障分析处理及应用2.1变桨轴承故障分析及处理变桨轴承是变桨驱动系统带动叶片转动和支撑叶片的主要装置,变桨轴承采用双排深沟球轴承,因风力发电机组长时间工作,灰尘、油脂等造成轴承污染,定期维护工作不到位导致轴承缺少润滑脂等容易造成轴承的摩擦与卡涩,长时间运行能够导致轴承的损坏。
出现变桨轴承故障,应及时对轴承表面和密封性进行检查,看是否有噪音、点蚀、断齿、腐蚀等现象,发现问题及时进行修补或更换新的变桨轴承。
为避免故障的发生应经常进行巡视检查,定期进行维护保养,加注润滑油脂。
2.2变桨减速机(齿轮箱)故障分析判断变桨减速机(齿轮箱)是变桨电机带动变桨小齿轮转动的减速装置,通过小齿轮带动变桨轴承转动进行变桨,如出现风电机组变桨驱动故障,有可能是齿轮箱油位低、渗漏油、平行齿轮磨损严重等故障。
在巡检和维护时要检查齿轮箱的油位是否正常、油色有无浑浊、是否有渗漏现象,并要进行手动变桨看是否有振动或噪音,有无卡涩现象。
2.3变桨电机系统故障分析处理变桨电机系统是变桨驱动的关键部件,变桨电机的后端带有冷却风扇和转速传感器,变桨电机内还安装有刹车。
变桨电机主要会出现绕组短路、电机发热、刹车抱死、振动和噪音等故障,造成故障的原因主要有绝缘电阻低、轴承卡涩、转子笼条断裂或开焊、刹车时间长或发热、冷却风扇损坏、接线松动等。
海上风力发电的变桨系统维护与故障排除

海上风力发电的变桨系统维护与故障排除随着对可再生能源的需求日益增长,海上风力发电作为一种清洁、可持续的能源方案越来越受到重视。
在海上风力发电系统中,变桨系统是非常关键的组成部分。
它负责调整风力涡轮的桨叶角度,以最大化能量转换效率。
然而,由于海上环境的恶劣条件和设备长时间运行的限制,变桨系统也面临着维护和故障排除的挑战。
变桨系统维护是确保风力涡轮持续高效运行的关键。
维护的主要目标是保持变桨系统各个部分的正常运行,以防止故障和停机时间的增加。
为了实现这一目标,定期检查和保养变桨系统至关重要。
维护人员应定期检查桨叶、液压系统、传动装置等关键部件,确保其无裂纹、磨损和松动。
此外,应定期清洁和润滑关键部件,以确保其正常运转。
维护人员还应关注变桨系统的运行数据,及时识别任何异常,避免潜在的故障。
然而,尽管进行了定期维护,变桨系统故障仍然不可避免。
故障排除是确保风力涡轮系统能够及时恢复生产运行的关键环节。
在发现任何系统故障时,维护人员应迅速采取措施,以最大程度地减少停机时间。
首先,进行排查故障的可能原因。
这可能包括液压系统故障、传动装置损坏、传感器故障等。
一旦找到故障的原因,维护人员应根据维修手册或制造商的指南进行修复或更换受损部件。
在排除故障时,维护人员还应注意安全问题。
海上风力发电涉及高海拔、恶劣天气等危险因素,因此维护人员应始终遵守相关安全规定,并佩戴适当的个人防护装备。
每次维护都应进行事先安全评估,并制定相应的应急计划。
只有在确保安全的情况下,维护人员才能进行维修工作。
遵循正确的维修程序和操作步骤是防止进一步损坏和确保任务顺利完成的关键。
此外,维护人员还应了解海上风力发电行业的最新技术和趋势。
随着风力发电技术的不断发展,新的变桨系统也不断涌现。
了解这些新技术将使维护人员具备更广阔的知识背景,能够更好地应对各种问题和挑战。
总之,海上风力发电的变桨系统维护与故障排除是确保风力涡轮系统持续高效运行的关键。
定期的维护工作和快速的故障排除将最大限度地减少停机时间,保证能源的持续供应。
风力发电机组变桨系统故障分析处理 尤志强
风力发电机组变桨系统故障分析处理尤志强发表时间:2019-09-15T17:49:43.627Z 来源:《电力设备》2019年第8期作者:尤志强[导读] 摘要:本文主要针对新能达坂城风电公司风力发电机组变桨系统故障进行案例分析,首先分析风力发电机组变桨系统在风机运行中的重要作用和控制方式。
(新疆达坂城新能风力发电有限责任公司新疆乌鲁木齐 830000)摘要:本文主要针对新能达坂城风电公司风力发电机组变桨系统故障进行案例分析,首先分析风力发电机组变桨系统在风机运行中的重要作用和控制方式。
并根据风电场风机变桨系统故障处理的实际经验,阐述了风力发电机组变桨通讯故障的原因分析,并针对故障提出相应的措施进行处理,增强了风力发电机组运行可靠性。
关键词:变桨通讯;滑环;干扰1 前言新疆达坂城新能风力发电有限责任公司位于新疆维吾尔自治区达坂城区西北,柴窝堡西北约8公里处距乌鲁木齐市约50公里。
于2013年6月动工建设,2014年6月竣工投产,装机容量99MW,安装金风科技单机的容量1.5MW的风力发电机组,总台数66台,风电机组采用一机一变单元接线方式。
设六条集电线路,每条集电线路装有11台风力发电机组。
风机变桨系统是风机的重要组成部分,主要功能是通过对叶片节距角的控制,实现最大风能捕获以及恒速运行。
我风场地处超Ι类风区,常年风频变化较快、夏季高温及冬季严寒,所使用风力发电机组在实际运行中频繁报出变桨通讯故障,导致风场大规模机组停运,重者损坏风机大型机械原件,造成更大的经济损失,直接影响了风电场的发电量和经济效益,解决此类问题迫在眉睫。
2近年来的故障现象及隐患危害2.1 2017年7月4日,新能达坂城风电公司中控室风机监控机打出6台风力发电机组,变桨安全链动作;变桨位置比较故障;变桨速度超限故障;变桨通讯故障,共6台风机停机,共损失负荷9MW,造成我风电场严重的经济损失。
2.2 事故发生的原因2.2.1 滑环内部受污染,滑环经长时间运行,致使滑环插针损坏、固定不稳造成内部有灰尘、金属磨屑以及碳粉等杂物经长时间累积得不到不清理;还因滑环有环形轨道,即有相对驻留位置,驻留位置附近由于讯号电的吸附作用,导致灰尘更容易停留,导致滑环内部受到污染的程度加剧,导致变桨通讯信号时断时续,致使控制单元无法接受和反馈信号,从而报变桨通讯故障;还由于滑环内部构造的原因,滑环为滑动接触式,长时间运行,造成滑环磁道磨损严重,造成滑道与触点接触不良等现象,也可以引起信号中断和延时。
变桨系统故障分析
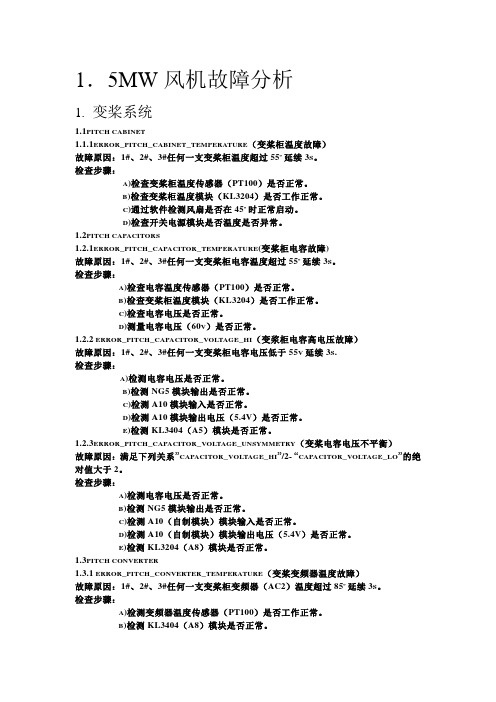
1.5MW风机故障分析1.变桨系统1.1PITCH CABINET1.1.1ERROR_PITCH_CABINET_TEMPERATURE(变桨柜温度故障)故障原因:1#、2#、3#任何一支变桨柜温度超过55º延续3S。
检查步骤:A)检查变桨柜温度传感器(PT100)是否正常。
B)检查变桨柜温度模块(KL3204)是否工作正常。
C)通过软件检测风扇是否在45º时正常启动。
D)检查开关电源模块是否温度是否异常。
1.2PITCH CAPACITORS1.2.1ERROR_PITCH_CAPACITOR_TEMPERATURE(变桨柜电容故障)故障原因:1#、2#、3#任何一支变桨柜电容温度超过55º延续3S。
检查步骤:A)检查电容温度传感器(PT100)是否正常。
B)检查变桨柜温度模块(KL3204)是否工作正常。
C)检查电容电压是否正常。
D)测量电容电压(60V)是否正常。
1.2.2 ERROR_PITCH_CAPACITOR_VOLTAGE_HI(变浆柜电容高电压故障)故障原因:1#、2#、3#任何一支变桨柜电容电压低于55V延续3S.检查步骤:A)检测电容电压是否正常。
B)检测NG5模块输出是否正常。
C)检测A10模块输入是否正常。
D)检测A10模块输出电压(5.4V)是否正常。
E)检测KL3404(A5)模块是否正常。
1.2.3ERROR_PITCH_CAPACITOR_VOLTAGE_UNSYMMETRY(变桨电容电压不平衡)故障原因:满足下列关系”CAPACITOR_VOLTAGE_HI”/2-“CAPACITOR_VOLTAGE_LO”的绝对值大于2。
检查步骤:A)检测电容电压是否正常。
B)检测NG5模块输出是否正常。
C)检测A10(自制模块)模块输入是否正常。
D)检测A10(自制模块)模块输出电压(5.4V)是否正常。
E)检测KL3204(A8)模块是否正常。
大功率风电机组变桨系统故障诊断方法分析
大功率风电机组变桨系统故障诊断方法分析摘要:社会水平逐渐提升,环境保护理念愈发得到大众的重视,风能属于一种清洁的资源形式,在当前的应用能源中占据着重要地位,带动风电机组的投产数量增多,机组运行维护成为了重点工作内容,其中变桨系统经常会出现故障现象,对此,本文主要围绕着变桨系统故障来展开,基于大功率型号的风电机组,分析故障出现时正确的诊断方法,提升机组安全性。
关键词:额定风速;诊断手段;机组结构;变桨角度;通讯系统引言:当前,风力发电的开发应用日渐增加,大功率的风电机组是现代社会风力发电工作中的主流,其中,变桨控制系统属于关键部分,而变桨系统故障问题频繁出现,影响了风电机组的正常运作,对此,检修人员应掌握故障的诊断方法,保证桨叶高效捕捉到风能资源,促进机组能够安全运行下去,推动风电产业稳定发展,节省不可再生能源。
一、变桨系统的功能以及原理通过观察额定风速,如果风速超过了这一标准,借助对叶片角度的控制,制约风机的转动速度、功率;如果风速低于这一标准,改变叶片的角度,从风中开始吸收,得到更多风能;如果观察安全链已经处于断开的状态,叶片也可以发挥另一作用,作为空气动力制动装置,保证机组能够安全的停止运作。
在变桨控制系统中,功率可以灵活变化,主要对叶片部位进行迎角调整,安装变桨驱动电机,为回转轴承提供动力,从而发生转动现象,让叶片的迎角得到改变,从而调节、控制升力作用,从而将扭矩、功率限制在合理的范围内。
一般来讲,变桨的角度处于一定范围内,具体数值介于0~89°,对于体系中的风力发电机组,当运行状态处于正常模式时,叶片发生变化,朝着小迎角方向改变,这样能促进功率达到标准的效果。
针对变桨调整桨距角,风机的叶片顺桨后,改变了风轮的转动情况,其速度慢慢降低,在额定点的前、后,分别输出饱满功率、平滑功率,在风轮的叶根段位置,承担的动荷载、静荷载相对比较小。
通过研究变桨系统,其属于基本的制动系统,在额定的功率范围内,能够在风机速度方面起到调控作用,促进风电机组高效运作,助力我国新能源行业得到有序发展。
风机变桨超限措施
风机变桨超限措施1. 引言风机变桨是风力发电系统中的关键组成部分,用于调整风机桨叶角度以适应不同的风速和功率需求。
然而,由于各种原因,风机变桨可能出现超限情况,即桨叶角度超出安全范围。
本文将介绍风机变桨超限的原因、影响以及常用的措施。
2. 风机变桨超限的原因风机变桨超限可能由以下原因造成:2.1 风力过大当风力超过额定风力时,风机可能无法及时调整桨叶角度以控制输出功率,从而导致桨叶角度超限。
2.2 控制系统故障风机变桨控制系统的故障可能导致桨叶角度无法准确地调整。
例如,传感器故障、执行器故障或控制算法问题都可能导致桨叶角度超限。
2.3 运行状态异常风机变桨在运行过程中可能遇到一些异常状态,例如桨叶卡滞、液压系统故障等,这些异常状态可能导致桨叶角度超限。
3. 风机变桨超限的影响风机变桨超限可能对风力发电系统产生以下影响:3.1 安全风险桨叶角度超限可能导致桨叶失控或折断,从而造成设备损坏甚至人员伤亡的安全风险。
3.2 设备损坏桨叶角度超限可能导致桨叶过载,加剧桨叶的疲劳破坏,进一步导致设备损坏。
3.3 功率损失如果风机变桨超限导致桨叶角度无法及时调整,风机的输出功率将无法达到设计要求,从而导致发电量损失。
4. 风机变桨超限措施针对风机变桨超限问题,可以采取以下措施来减少超限发生的可能性,保护风力发电系统的安全和可靠运行:4.1 安全控制策略在风机变桨控制系统中,引入安全控制策略,例如设置桨叶角度上下限,当桨叶角度超出限制时,立即停机或减小功率输出,以保证系统的安全运行。
4.2 红外监测系统利用红外监测技术检测风机桨叶的实时温度和应力情况,当桨叶温度或应力超过设定阈值时,及时发出警报并停机,以防止桨叶角度超限。
4.3 增强维护定期对风机变桨控制系统进行检修和维护,及时更换老化和故障的传感器和执行器,保持系统的稳定运行状态。
5. 结论风机变桨超限可能造成安全风险、设备损坏和功率损失等影响,因此需要采取一系列措施来防止超限发生。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LUST 变桨系统旁路限位开关超时一、基本信息
启动风机,桨叶无法开桨,主控报出旁路限位开关超时故障。
3、故障分析
导致报出此故障主要有两方面原因:
1、有一只或者多只叶片在上次故障停机时未到达限位开关位置。
图1 限位开关回路
出现叶片无法压到限位开关,可能 A 编码器角度已经变化,即编码器反应的角度已经不是叶片的实际位置了。
必须确保风机在停机时,叶片在 92.5°前压到限位开关。
如果风机未收到“风暴位置反馈”信号,则风机在启动时不会发出“旁路限位开关”信号,致使压到限位开关的叶片无法离开限位开关,或者是叶片压限位开关角度过小,当叶片变桨到 90°仍然无法离开限位开关。
2、有一只或者多只叶片无法变桨。
图2 驱动回路
主控给变桨的三个信号异常:
A、正常变桨信号(主电源 OK 信号、MITA 等系统的 103 信号):当此信号=0 时,将开始电池收桨。
故障表现有:
启机时,叶片脱开限位开关后,马上收桨;
正常运行时,报错桨角不一致、跟踪设定值超速等;
B、旁路限位开关信号:
风机启动时,此信号将=1,其他时间均等于 0。
故障表现有:
启机时,若=0,风机无法变桨;
正常运行时,若=1(进行了短接),叶片无法启动电池收桨;
禁止将此信号常置为一(短接),后果严重。
C、Rpm OK 正常信号:
风机快速收桨时,此信号将=0,其他时间均等于 1。
故障表现有:
启机时,若=0,叶片达到 90°后不再动作;
正常运行时,若=0,叶片开始快速收桨。
4、处理方法
1、检查编码器数值未跳变,三面限位开关已经压在挡板上,并且查看变桨控制器显示叶片压限位开关角度在 91.6±0.3°内,属于为最佳位置。
所以排除第一种可能。
2、在主控柜打上人工维护开关,进入轮毂用变桨控制器变桨,但无法变桨。
根据前面分析我们分别测量图2中正常变桨信号、旁路限位开关信号和Rpm OK 信号(在变桨控制器DE3.3端口处)是否为24V,在测量时发现旁路限位开关信号为0V,有图3可知道打上维护开关时24V已经通过105端子送出,如果电压为零很可能是哪里接地了,于是我们从末端脱开线测量电压,也就是如图2中脱开3K1线圈上端的旁路限位开关信号线进行测量,发现有24V 电压。
但再接上线测量为0V 。
所以可以确定3K5开关下端到3K1 上端以及并在3K1上的二极可能有接地现象。
最后用万用表测量发现二极管已经击穿,所以确定是二极管击穿导致线路接地。
更换二极管后就能正常变桨。
图3 维护开关回路(103为正常变桨信号105为旁路限位开关信号)
5、所需的备品备件
续流二极管一个
6、所需工具
万用表一块
小号一字螺丝刀一把
绝缘胶布一卷
7、注意事项。
有一只或者多只叶片无法变桨,可能存在过流的风险。
手动变桨时注意听开关动作声音,以及变桨电机、减速齿轮箱等动作声音,发现异常声音应立刻停止变桨。
8、维修总结。
处理故障前要分析故障透彻,理清思路,不可盲目进行操作。
特别是变桨类故障比较复杂,检修空间比较有限,人员容易受到伤害。
进入轮毂要两人,配合要默契,每一步操作都要告知对方,做到安全第一。
编写者:
审核人:。