FANUC机器人硬件介绍NEW
FANUC机器人硬件介绍(NEW)

FANUC硬件介绍(NEW) FANUC硬件介绍(NEW)一、概述1.1 类型1.2 型号1.3 应用领域二、基本构成2.1 本体2.1.1 结构布局2.1.2 材料选择2.1.3 外形尺寸2.2 控制系统2.2.1 控制器2.2.2 伺服驱动器2.3 运动系统2.3.1 关节系统2.3.2 手臂系统2.3.3 手指系统2.4 传感器系统2.4.1 视觉传感器 2.4.2 线性传感器2.4.3 力触覺传感器三、核心功能3.1 运动控制功能3.1.1 关节控制3.1.2 手臂控制3.1.3 手指控制3.2 编程功能3.2.1 离线编程3.2.2 在线编程3.2.3 编程语言支持 3.3 安全保护功能3.3.1 碰撞检测3.3.2 自动停机3.3.3 安全防护装置四、附件4.1 附件1:操作手册4.2 附件2:示教箱说明书4.3 附件3:维修与保养手册4.4 附件4:备件清单五、法律名词及注释5.1 法律名词1:注释:是的缩写,指代法律条款说明5.2 法律名词2:注释:是的缩写,指代法律条款说明六、结束语本文档为FANUC硬件介绍,详细介绍了的概述、基本构成、核心功能等内容,附件部分提供了操作手册、示教箱说明书、维修与保养手册以及备件清单。
对于涉及的法律名词,附上了对应的注释。
如有任何疑问或需要进一步了解,欢迎联系我们。
1、本文档涉及附件:附件1:操作手册附件2:示教箱说明书附件3:维修与保养手册附件4:备件清单2、本文所涉及的法律名词及注释:法律名词1:注释:是的缩写,指代法律条款说明法律名词2:注释:是的缩写,指代法律条款说明。
fanuc机器人控制柜结构及原理介绍

类型
根据机器人型号和需求,可选用不同的控制 器模块。
特点
具有高性能、高可靠性等特点,确保机器人 精确、稳定运行。
通信模块
功能
实现机器人与上位机、其他设备之间的通 信。
类型
包括串口通信模块、以太网通信模块等。
fanuc机器人控制柜结构及原 理介绍
汇报人:
202X-12-22
CONTENTS
• 引言 • fanuc机器人控制柜结构 • fanuc机器人控制原理 • fanuc机器人控制柜功能 • fanuc机器人控制柜应用案例 • 结论与展望
01
引言
目的和背景
介绍Fanuc机器人控制柜的结构和原理
本文旨在详细介绍Fanuc机器人控制柜的结构组成、工作原理以及各个部分的功 能。
种复杂运动。
逻辑控制
02
控制器根据程序要求对机器人的动作进行逻辑判断和控制,确
保机器人按照预定要求执行任务。
故障诊断与处理
03
控制器具备故障诊断和处理功能,能够及时发现并处理机器人
运行过程中的异常情况。
通信功能
通信接口
控制柜提供多种通信接口,如以太网、串口等,方便与上位机或 其他设备进行通信。
通信协议
自动化流程
详细描述生产线上各设备之间的联动、数据传输和加工流程,突出 机器人控制柜在其中的作用。
案例效果
总结生产线自动化带来的效益,如提高生产效率、降低成本、提升产 品质量等。
物流自动化案例
物流系统组成
介绍物流系统的主要组成部分,包括仓储、搬运、分拣等环节。
机器人控制柜应用
阐述机器人控制柜在物流系统中的应用,如路径规划、任务调度、 与上位机通信等。
Fanuc机器人IO配置和UIUO配置
Fanuc机器人IO配置和UI/UO配置说明:这几天直接跳转发送Fanuc部分内容知识,以供大家阅读借鉴。
这里主要给大家分享Fanuc机器人的IO分类以及CRMA15、CRMA16的IO分配,UI/UO的分配。
一、Fanuc机器人IO种类1、Fanuc机器人IO分类I/O (输入/输出信号),是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号。
有通用 I/O 和专用 I/O 。
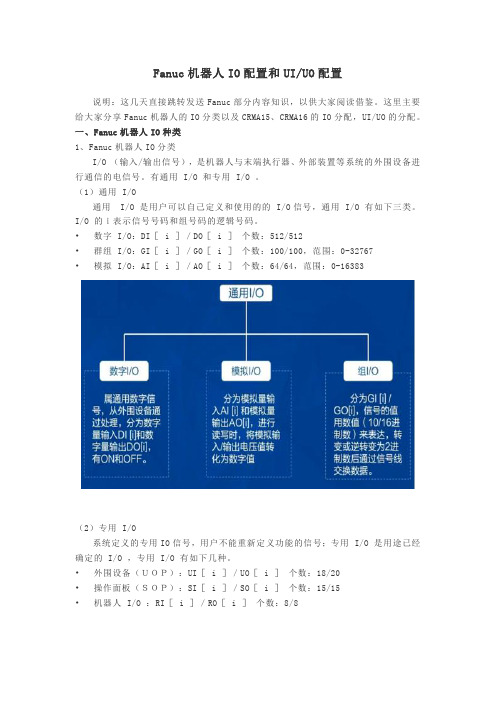
(1)通用 I/O通用I/O 是用户可以自己定义和使用的的 I/O信号,通用 I/O 有如下三类。
I/O 的i表示信号号码和组号码的逻辑号码。
•数字 I/O:DI[ i ]/DO[ i ]个数:512/512•群组 I/O:GI[ i ]/GO[ i ]个数:100/100,范围:0-32767•模拟 I/O:AI[ i ]/AO[ i ]个数:64/64,范围:0-16383(2)专用 I/O系统定义的专用IO信号,用户不能重新定义功能的信号;专用 I/O 是用途已经确定的 I/O ,专用 I/O 有如下几种。
•外围设备(UOP):UI[ i ]/UO[ i ]个数:18/20•操作面板(SOP):SI[ i ]/SO[ i ]个数:15/15•机器人 I/O :RI[ i ]/RO[ i ]个数:8/83、Fanuc机器人图片(图片来自百度网络)二、Fanuc机器人通讯IO模块1、Fanuc机器人硬件种类和机架号机架系指构成I/O 模块的硬件的种类。
•0 =处理 I/O 印刷电路板•1~16=I/O 单元 MODELA/B•32 =I/O LINK 从动装置•48 =外围设备控制接口(CRMA15、CRMA16)2、Fanuc机器人CRMA15、CRMA16插槽插槽系指构成机架的I/O 模块部件的号码。
•使用处理 I/O 印刷电路板的情况下,按所连接的印刷电路板顺序分别为插槽1、2...。
•使用 I/O 单元 MODEL A/B的情况下,则为用来识别所连接模块的号码。
最全发那科工业机器人示教器详细介绍

最全发那科工业机器人示教器详细介绍现在机器人市场占有率越来越高,当然机器人工程师这块的人才也是越来越多,但是有些小伙伴用的可能是国产的和欧系的,也有的小伙伴可能用的是日系的,这都没有关系,因为原理都是相通的,一般只要看一下说明书或者示教器上一些功能的详细解说,也可以把原本陌生的机器人大哥玩得666.今天我们就以发那科为例,来说一下示教器上各个功能的应用。
示教器简称TP,它是用户与机器人之间相互交流的重要装置。
用户可以通过操作示教器来查看机器人当前位置、寄存器数据、IO分配情况、点动机器人、创建程序、编写机器人、对程序进行调试以及让机器人投入生产。
示教器主要分两大类单色示教器和彩色示教器,如下图所示单色示教器彩色示教器单色示教器介绍单色示教器介绍单色示教器介绍单色示教器状态指示灯说明LED指示灯功能FAULT 目前有报警出现。
HOLD 目前处于暂停状态。
STEP 目前机器人处于单步执行模式。
BUSY 目前机器人正处于运动,或者程序正在运行。
RUNNING 目前程序正在运行。
WELD ENBL 目前弧焊准备中。
ARC ESTAB 目前弧焊进行中。
DRY RUN 目前在测试操作模式下。
JOINT 目前示教坐标系处于关节坐标系模式。
XYZ 目前示教坐标系处于通用坐标系或用户坐标系模式。
TOOL 目前示教坐标系处于工具坐标系模式。
彩色示教器介绍示教器正面图和反面图↓示教器正面示教器反面示教器面板说明示教器面板说明示教器按键介绍表点动机器人方法以上就是发那科机器人示教器的外表详细介绍及各个按键的功能的详细讲解了,如果还有什么疑问的,可以在文末留言,有需要发那们仿真软件的小伙伴,也可以添加文末二维码,找左老师获取哦!。
FANUC系统硬件介绍
a
16
新0IC系统后视图
BEIJING-FANUC
a
17
新0IC系统硬件功能
BEIJING-FANUC
a
18
新0IC系统的主板型号
BEIJING-FANUC
a
19
新0IC系统主板插头定义
BEIJING-FANUC
a
20
轴卡电源的安装位置
BEIJING-FANUC
a
21
新0IC的FROM/SRAM卡安装位置
高速高精度复合型多轴多系统控制的纳米级CNC
FANUC Series 30i/31i/32i-MODEL A
●5轴加工机、复合加工机、多轴多路径的尖端机床
a
6
I/O单元
FANUC I/O Link
DI/DO 1024/1024
机械侧 I/O
机床操作盘
分散 I/O 0i用I/O模块
BEIJING-FANUC
a
14
2.存储数据类型
BEIJING-FANUC
NC内有SRAM和FROM 2个存储区,并分别存储有以下数据.
a
15
2.BOOT系统
BEIJING-FANUC
BOOT系统是在接通电源时把存放在FROM存储器中的各种软 件转送(安装)到系统作业用DRAM存储器中的一种软件.
在FROM/SRAM模块上的闪存卡里,存储的软件有CNC系统 软件,伺服软件,PMC管理软件和PMC梯形图。在开机时这 些软件(CNC的管理软件)从FROM先登陆到DRAM模块和伺 服卡的RAM后再开始执行。如果存储在FROM/SRAM模块的 软件被破坏就发生ROM奇偶性报警.
随着电子技术和计算机技术以及IT技术的发展,目前,这些机床与
Fanuc机器人电气硬件

PSU 电源顶部保险F1 8A 用于AC 输入 。
电源经变压器从CP1引入,经过F1.送入PSU 内部通过背板传输了如下电源 +5 +2.0V +3.3 +24v +24E +15V -15V主板接口描述:主板的内部结构面板电路板引申一下KM21与KM22的作用它们分别接至操作面板上上的急停按钮的两个常闭通道。
通过检测线圈的得电情况,将信号通过光耦,送至I/Olink 信号处理。
示教器保险丝,熔断后不显示。
接入急停单元。
橙色端子的定义上端接线端子。
(紧急停止、外部急停护栏等信号。
)紧急停止此部分全部采用端接片,本机器人急停采用的是网络信号。
、延时接触器紧急停止线路的输出。
(下侧)伺服ON/OFF 外部ON/OFF 此处也是全部短接,靠总线信号控制。
伺服放大器Fanuc 伺服放大器 一个放大器集成了6轴放大器接线详解左上角电源部分下、右管脚部分急停单元此急停单元的思考,此急停单元主要是靠KM1与KM2供给伺服单元供电接口(CRR38A)中间通过KA1与KA4控制, KA1与KA4的控制是靠三级管通过信号控制(DO),通过CRM95(接面板电路板) A4、B4引脚连接,检测伺服是否上电通过LS11 LS12光耦送入主板信号。
也通过CRM95(接面板电路板)中的A6、B6脚检测KM1与KM2是否吸合。
至于KA5的作用??连接释放电阻???有待考证。
嘿嘿详见急停单元电路图。
关于机器人各轴伺服电机机器人采用的是绝对值串行脉冲编码器,该编码器使用的是4节碱性电池保存数据此电池位于机器人J1轴下方底座的电池仓内此电池要求在控制器上电的情况下,每年予以更换一次。
特别注意,在进行机器人维护的时候,在没有确认系统备份的情况下,请勿将编码器通讯线拆卸下来,也不能再关机的状态下将电池盖子打开!!这样做会使轴零点丢失,需要重新进行零点校正。
详见后面的零点校正与机器人备份与还原。
目前此机器人能识别的存储介质。
1:USB 位于机器人操作柜的盖板下。
Fanuc机器人IO配置和UIUO配置

Fanuc机器⼈IO配置和UIUO配置Fanuc机器⼈IO配置和UI/UO配置说明:这⼏天直接跳转发送Fanuc部分内容知识,以供⼤家阅读借鉴。
这⾥主要给⼤家分享Fanuc机器⼈的IO分类以及CRMA15、CRMA16的IO分配,UI/UO的分配。
⼀、Fanuc机器⼈IO种类1、Fanuc机器⼈IO分类I/O (输⼊/输出信号),是机器⼈与末端执⾏器、外部装置等系统的外围设备进⾏通信的电信号。
有通⽤I/O 和专⽤I/O 。
(1)通⽤I/O通⽤I/O 是⽤户可以⾃⼰定义和使⽤的的I/O信号,通⽤I/O 有如下三类。
I/O 的i表⽰信号号码和组号码的逻辑号码。
数字I/O:DI[i ]/DO[i ]个数:512/512群组I/O:GI[i ]/GO[i ]个数:100/100,范围:0-32767模拟I/O:AI[i ]/AO[i ]个数:64/64,范围:0-16383(2)专⽤I/O系统定义的专⽤IO信号,⽤户不能重新定义功能的信号;专⽤I/O 是⽤途已经确定的I/O ,专⽤I/O 有如下⼏种。
外围设备(UOP):UI[i ]/UO[i ]个数:18/20操作⾯板(SOP):SI[i ]/SO[i ]个数:15/15机器⼈I/O :RI[i ]/RO[i ]个数:8/83、Fanuc机器⼈图⽚(图⽚来⾃百度⽹络)⼆、Fanuc机器⼈通讯IO模块1、Fanuc机器⼈硬件种类和机架号机架系指构成I/O 模块的硬件的种类。
?0 =处理I/O 印刷电路板1~16=I/O 单元MODELA/B32 =I/O LINK 从动装置48 =外围设备控制接⼝(CRMA15、CRMA16)2、Fanuc机器⼈CRMA15、CRMA16插槽插槽系指构成机架的I/O 模块部件的号码。
使⽤处理I/O 印刷电路板的情况下,按所连接的印刷电路板顺序分别为插槽1、2...。
使⽤I/O 单元MODEL A/B的情况下,则为⽤来识别所连接模块的号码。
fanuc机器人资料

fanuc机器人资料梳理FANUC 发那科是日本一家专门研究数控系统的公司,成立于1956年。
自1974年,FANUC 首台机器人问世以来,FANUC致力于机器人技术上的领先与创新,是世界上唯一一家由机器人来做机器人的公司,是世界上唯一提供集成视觉系统的机器人企业,是世界上唯一一家既提供智能机器人又提供智能机器的公司,萝卜库是全国首家服务机器人的平台。
萝卜库正在整合国内外服务机器人的资源(含各式服务资源、产品资源、工程师资源、爱好者资源、机器人学习者资源等),通过平台的市场渠道、粉丝经济运作(市场资源),与投资人、投资机构、政府合作,快速推动服务类机器人在国内外的应用,为智能科技的发展做出更多贡献。
Fanuc机器人经典构成:1.数控主板:用于核心控制、运算、存储、伺服控制等。
新主板集成了PLC功能。
2.PLC板:用于外围动作控制。
新系统的PLC板已经和数控主板集成到一起。
3.I/O板:早期的I/O板用于数控系统和外部的开关信号交换。
新型的I/O板主要集成了显示接口、键盘接口、手轮接口、操作面板接口及RS232接口等。
4.MMC板:人机接口板。
这是个人电脑化的板卡,不是必须匹配的。
本身带有CRT、标准键盘、软驱、鼠标、存储卡及串行、并行接口。
5.CRT接口板:用于显示器接口。
新系统中,CRT接口被集成到I/O板上。
另外,还提供其他一些可选板卡等。
FANUC数控系统功能介绍1、控制轨迹数(Controlled Path)CNC控制的进给伺服轴(进给)的组数。
加工时每组形成一条刀具轨迹,各组可单独运动,也可同时协调运动。
2、控制轴数(ControlledAxes)CNC控制的进给伺服轴总数/每一轨迹。
3、联动控制轴数(Simultaneously Controlled Axes)每一轨迹同时插补的进给伺服轴数。
4、PMC控制轴(Axis control by PMC)由PMC(可编程机床控制器)控制的进给伺服轴。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人本体硬件概况/机器人本体
2021/2/17
马达 (编码器,电机,包闸机构) 减速机
J4轴结构简介
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FANUC 机器人硬件、接口、仿真
机器人本体硬件概况/机器人本体
2021/2/17
马达 (编码器,电机,包闸机构) 减速机
J5/J6轴结构简介
FANUC 机器人硬件、接口、仿真
机器人本体硬件概况/机器人本体
2021/2/17
马达(编码器,电机,包闸机构) 减速机 基座
J1轴结构简介
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FANUC 机器人硬件、接口、仿真
机器人本体硬件概况/机器人本体
2021/2/17
马达 (编码器,电机,包闸机构) 减速机 基座
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FANUC 机器人硬件、接口、仿真
机器人本体硬件概况/机器人本体
机器人的运输
参阅机器人的机械电气手册
2021/2/17
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FANUC 机器人硬件、接口、仿真
IO单元
电源供应器
背板(基板)
操作面板
主板
R-J3i C控制器
外围设备
风扇 变压器
示教器 外围急停信号
2021/2/17
断开器
伺服放大器单元
输入电源FLEXSY急S R停O单BO元TICS
再生电阻 (SHANGHAI) CO .,LTD
机器人本体
FANUC 机器人硬件、接口、仿真
MAIN BOARD
J2轴结构简介
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FANUC 机器人硬件、接口、仿真
机器人本体硬件概况/机器人本体
2021/2/17
马达 (编码器,电机,包闸机构) 减速机
J3轴结构简介
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FANUC 机器人硬件、接口、仿真
FANUC机器人硬件介绍NEW
FANUC 机器人硬件、接口、仿真
工业机器人由机器人本体,控制器,示教器等设备组成!
机器人本体硬件概况
机器人本体是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标 系 ,一般为4轴和6轴,物流行业特别是码跺机器人一般采用4轴机器人。有些特殊的机器人 采用附加轴或者天轨、地轨。
1、参考FANUC机器人简易手册 2、参考FANUC机器人操作设置手册 3.参考FANUC机器人机械电气维护手册
FANUC 机器人硬件、接口、仿真
机器人本体外围接口
2021/2/17
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FANUC 机器人硬件、接口、仿真
机器人本体外围接口
2021/2/17
End effector interface(RDI/RDO)
8 点输入,8点输出(8RDI/8RDO) 提供24V直流电源 *HBK:手爪断裂信号 *PPABN:压缩空气压力不正常
4 CYCLE START Button/Lamp 运行按钮/指示灯
2021/2/17
5 FAULT RESET Button 错误复位按钮
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FANUC 机器人硬件、接口、仿真
机器人本体硬件概况/机器人本体
2021/2/17
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FANUC 机器人硬件、接口、仿真
机器人本体外围接口
2021/2/17
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FANUC 机器人硬件、接口、仿真
机器人本体外围接口
2021/2/17
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
Operation Panel 操作面板
电源断开器
2021/2/17
机器人本体
控制器
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
示教器
FANUC 机器人硬件、接口、仿真 1 23
机器人本体硬件概况/控制器
Power Disconnect Circuit Breaker
电源断开线路的断开器
1、Teach pendant
1)点动机器人 2)编写机器人程序 3)试运行程序 4)生产运行 5)查阅机器人的状态(I/O 设置,位置
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
显示屏 指示灯 急停开关 使能开关 键盘 DEADMAN SW
FANUC 机器人硬件、电池接口、仿真
FANUC 机器人硬件、接口、仿真
R-J3i C控制器 再生电阻
2021/2/17
正面
反面
变压器 380/220
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FANUC 机器人硬件、接口、仿真
R-J3i C控制器
2021/2/17
2、控制器
电源单元 主板单元 伺服放大单元 控制面板 主断路器 急停单元
EE,USER,AIR, DP2,DS2
机器人本体外围接口
WELDING POWER WATER AIR
2021/2/17
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
FANUC 机器人硬件、接口、仿真
机器人本体外围接口
2021/2/17
FLEXSYS ROBOTICS (SHANGHAI) CO .,LTD
ON:打开机器人电源 /open the power OFF:关闭机器人电源/close the power
2 1
Mode Select Switch
模式选择开关
★AUTO:自动模式 运行在自动运行条件下
★T1:手动慢速模式 运行速度=speed*250mm/s
★T2:正常手动模式 手动条件下最大运行速度 为100%
3
4
2
1
6
5
3
8 7
Operation Panel
操作面板
1 EMERGENCYSTOP Button6 RS-232 Serial Port
急停按钮
RS-232 串行接口
2 POWER 电源指示灯
7 PCMCIA Slot for main CPU 为主CPU 提供的PCMCIA 插槽
3 FAULT 故障指示灯