单片机程序大全
单片机c语言实例程序300篇
单片机c语言实例程序300篇单片机C语言【程序1】题目:有1、2、3、4个数字,能组成多少个互不相同且无重复数字的三位数?都是多少?1.程序分析:可填在百位、十位、个位的数字都是1、2、3、4。
组成所有的排列后再去掉不满足条件的排列。
2.程序源代码:main(){inti,j,k;printf("\n");for(i=1;i<5;i++)/某以下为三重循环某/for(j=1;j<5;j++)for(k=1;k<5;k++){if(i!=k&&i!=j&&j!=k)/某确保i、j、k三位互不相同某/printf("%d,%d,%d\n",i,j,k);}}==============================================================【程序2】题目:企业发放的奖金根据利润提成。
利润(I)低于或等于10万元时,奖金可提10%;利润高于10万元,低于20万元时,低于10万元的部分按10%提成,高于10万元的部分,可可提成7.5%;20万到40万之间时,高于20万元的部分,可提成5%;40万到60万之间时高于40万元的部分,可提成3%;60万到100万之间时,高于60万元的部分,可提成1.5%,高于100万元时,超过100万元的部分按1%提成,从键盘输入当月利润I,求应发放奖金总数?1.程序分析:请利用数轴来分界,定位。
注意定义时需把奖金定义成长整型。
2.程序源代码:main()单片机C语言{longinti;intbonu1,bonu2,bonu4,bonu6,bonu10,bonu;canf("%ld",&i);bonu1=100000某0.1;bonu2=bonu1+100000某0.75;bonu4=bonu2+200000某0.5;bonu6=bonu4+200000某0.3;bonu10=bonu6+400000某0.15;if(i<=100000)bonu=i某0.1;eleif(i<=200000)bonu=bonu1+(i-100000)某0.075;eleif(i<=400000)bonu=bonu2+(i-200000)某0.05;eleif(i<=600000)bonu=bonu4+(i-400000)某0.03;eleif(i<=1000000)bonu=bonu6+(i-600000)某0.015;elebonu=bonu10+(i-1000000)某0.01;printf("bonu=%d",bonu);}============================================================ ==【程序3】题目:一个整数,它加上100后是一个完全平方数,再加上168又是一个完全平方数,请问该数是多少?1.程序分析:在10万以内判断,先将该数加上100后再开方,再将该数加上268后再开方,如果开方后的结果满足如下条件,即是结果。
单片机典型程序
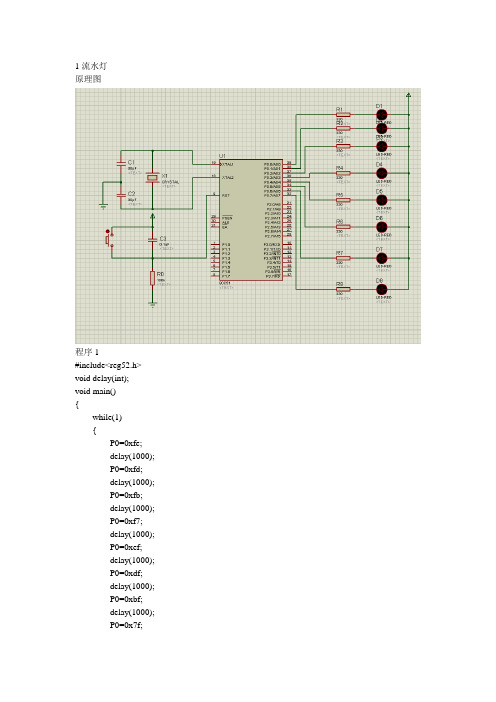
1流水灯原理图程序1#include<reg52.h> void delay(int);void main(){while(1){P0=0xfe;delay(1000);P0=0xfd;delay(1000);P0=0xfb;delay(1000);P0=0xf7;delay(1000);P0=0xef;delay(1000);P0=0xdf;delay(1000);P0=0xbf;delay(1000);P0=0x7f;delay(1000);}}void delay(int z){int i,j;for(i=z;i>0;i--)for(j=100;j>0;j--);}程序2(库函数)#include<reg51.h>#include<intrins.h>#define N 400void delay(int);void main (){char a;a=0xfe;while(1){P0=a;delay(N);a=_crol_(a,1);delay(N);}}void delay(int c){int i,j;for(i=c;i>0;i--)for(j=100;j>0;j--);}程序3(数组)#include<reg52.h>void delay(int);int a[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f}; void main (){while(1){int m;for(m=0;m<8;m++){P0=a[m];delay(500);}}}void delay(int z){int i,j;for(i=z;i>0;i--)for(j=100;j>0;j--);}程序4(位移)include<reg51.h>#include<intrins.h>void delay(int);void main (){int m;while(1){char a=0xfe;P2=a;delay(400);a=a<<1;a=a+1;if(i++>6){a=0xfe;i=0;}}}void delay(int c){int i,j;for(i=c;i>0;i--)for(j=200;j>0;j--);程序5(前4亮后4灭)#include <reg51.h>#define SetTimeValue 500void DelayTime(int DelayValue) {int a,b;for(a=0;a<DelayValue;a++)for(b=0;b<1827;b++);}void main(){while(1){P0=0x0f;DelayTime(SetTimeValue);P0=0xf0;DelayTime(SetTimeValue);}2按键自加自减#include<reg51.h>int a[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};sbit key01=P3^4;sbit key02=P3^5;sbit wela=P2^7;sbit dula=P2^6;void delay(int z);void main(){ int i=0;while(1){P0=0;wela=1;wela=0;P0=a[i];dula=1;dula=0;if(i>9)i=0;if(key01==0){delay(5);if(key01==0)i++;while(key01==0);}if(key02==0){delay(5);if(key02==0){i--;if(i<0)i=9;}while(key02==0);}}}void delay(int z){int i,j;for(i=z;i>0;i--)for(j=100;j>0;j--);}3按键显示器void Display(int DisplayNumber) {P0=0;Seg_Position=1;Seg_Position=0;P0=Table[DisplayNumber];Seg_Code=1;Seg_Code=0;}void main(){int KeyValue=0;while(1){Display(KeyValue);if(key==0){DelayTime_10ms(2);if(key==0){KeyValue++;}while(key==0);}}}4矩阵按键#include <reg51.h>sbit Seg_Position=P2^7;sbit Seg_Code=P2^6;sbit key=P3^4;void DelayTime_10ms(unsigned int DelayValue) {unsigned int a,b;for(a=0;a<DelayValue;a++)for(b=0;b<1827;b++);}unsigned Table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d}; void Display(int DisplayNumber){P0=0;Seg_Position=1;Seg_Position=0;P0=Table[DisplayNumber];Seg_Code=1;Seg_Code=0;}void main(){int KeyValue=5;unsigned char Temp=0;while(1){P3=0xfe;Temp=P3;Temp=Temp&0xf0;if(Temp!=0xf0){DelayTime_10ms(2);P3=0xfe;Temp=P3;Temp=Temp&0xf0;if(Temp!=0xf0){switch(Temp){case 0xe0:KeyValue=0;break;case 0xd0:KeyValue=1;break;}}}Display(KeyValue);}}5 6位数码管显示1-6#include <reg52.h> sbit dula=P2^6; sbit wela=P2^7; void delay(int); void main(){while(1){P0=0xfe;wela=1;wela=0;P0=0x06;dula=1;dula=0;delay(5);P0=0xfd;wela=1;wela=0;P0=0x5b;dula=1;dula=0;delay(5);P0=0xfb;wela=1;wela=0;P0=0x4f;dula=1;dula=0;delay(5);P0=0xf7;wela=1;wela=0;P0=0x66;dula=1;dula=0;delay(5);P0=0xef;wela=1;wela=0;P0=0x6d;dula=1;dula=0;delay(5);P0=0xdf;wela=1;wela=0;P0=0x7d;dula=1;dula=0;delay(5);}}void delay(int z) {int i,j;for(i=z;i>0;i--)for(j=100;j>0;j--);}6,16键盘显示#include <reg51.h>sbit Seg_Position=P2^7;sbit Seg_Code=P2^6;sbit key=P3^4;void DelayTime_10ms(unsigned int DelayValue){unsigned int a,b;for(a=0;a<DelayValue;a++)for(b=0;b<1827;b++);}unsignedTable[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71} ;void Display(int DisplayNumber){P0=0;Seg_Position=1;Seg_Position=0;P0=Table[DisplayNumber];Seg_Code=1;Seg_Code=0;}void main(){int KeyValue=15;unsigned char Temp=0;while(1){P3=0xfe;Temp=P3;Temp=Temp&0xf0;if(Temp!=0xf0){DelayTime_10ms(2);P3=0xfe;Temp=P3;Temp=Temp&0xf0;if(Temp!=0xf0){switch(Temp){case 0xe0:KeyValue=0;break;case 0xd0:KeyValue=1;break;case 0xb0:KeyValue=2;break;}}}Display(KeyValue);P3=0xfd;Temp=P3;Temp=Temp&0xf0;if(Temp!=0xf0){DelayTime_10ms(2);P3=0xfd;Temp=P3;Temp=Temp&0xf0;if(Temp!=0xf0){switch(Temp){case 0xe0:KeyValue=4;break;case 0xd0:KeyValue=5;break;case 0xb0:KeyValue=6;break;case 0x70:KeyValue=7;break;}}}Display(KeyValue);P3=0xfb;Temp=P3;Temp=Temp&0xf0;if(Temp!=0xf0){DelayTime_10ms(2);P3=0xfb;Temp=P3;Temp=Temp&0xf0;if(Temp!=0xf0){switch(Temp){case 0xd0:KeyValue=9;break;case 0xb0:KeyValue=10;break;case 0x70:KeyValue=11;break;}}}Display(KeyValue);P3=0xf7;Temp=P3;Temp=Temp&0xf0;if(Temp!=0xf0){DelayTime_10ms(2);P3=0xf7;Temp=P3;Temp=Temp&0xf0;if(Temp!=0xf0){switch(Temp){case 0xe0:KeyValue=12;break;case 0xd0:KeyValue=13;break;case 0xb0:KeyValue=14;break;case 0x70:KeyValue=15;break;}}}Display(KeyValue);}}7,共阳数码管1位#include<reg52.h>void delay(int);int a[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e}; void main(){int m;while(1){for(m=0;m<16;m++){P0=a[m];delay(500);}}}void delay(int z){int i,j;for(i=z;i>0;i--)for(j=100;j>0;j--);}8,共阳数码管2位#include<reg52.h>void delay(int);int a[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; int b[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; void main(){int m,n;while(1){for(n=0;n<10;n++){P0=a[n];for(m=0;m<10;m++){P3=b[m];delay(500);}}}}void delay(int z){int i,j;for(i=z;i>0;i--)for(j=100;j>0;j--);}9,定时器控制闪烁灯#include<reg52.h>void main(){TMOD=0x01;ET0=1;EA=1;TR0=1;TH0=65286/256;TL0=65286%256;while(1){;}}void INT() interrupt 1{TH0=65286/256;TL0=65286%256;P0=!P0;}10,计数器控制按键加1显示#include<reg52.h>int a[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; sbit key01=P2^7;sbit key02=P2^6;sbit key=P3^4;int n=0;void main(){TMOD=0x05;ET0=1;EA=1;TR0=1;TH0=65535/256;TL0=65535%256;while(1){void Int1();P0=0;key01=1;key01=0;P0=a[n];key02=1;}}void INT() interrupt 1 {TH0=65535/256;TL0=65535%256;n++;}11,延时的闪烁灯#include<reg51.h>#include<intrins.h>#define N 400void delay(int);void main (){char a;a=0xfe;while(1){P0=a;delay(N);a=_crol_(a,1);delay(N);}}void delay(int c){int i,j;for(i=c;i>0;i--)for(j=100;j>0;j--);}12,脉冲4下灯亮#include<reg51.h>sbit led0=P0^0;void main(){TMOD=0x06;TH0=0;TL0=0;TR0=1;EA=1;ET0=1;while(1){led0=0;}}void Count_Timer0() interrupt 1 {led0=0;}13,用中断控制流水灯#include<reg51.h>#include<intrins.h>int num,aa;void main(){ TMOD=0X01;TH0=(65536-45872)/256;TL0=(65536-45872)%256;EA=1;ET0=1;TR0=1;aa=0xfe;P0=aa;while(1);}void t0_time() interrupt 1{ TH0=(65536-45872)/256;TL0=(65536-45872)%256;num++;if(num==20){num=0;aa=_crol_(aa,1);P0=aa;}}14,倒计时5分钟#include <reg51.h>sbit Seg_Position_Select=P2^7;sbit Seg_Code_Select=P2^6;unsigned char Display_One=0;unsigned char Display_Ten=0;unsigned char Second=0;unsigned char Minute=5;unsigned char Table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71} ;void DelayTime_10ms(unsigned int DelayValue){unsigned int a,b;for(a=0;a<DelayValue;a++)for(b=0;b<182;b++);}void Display( ){unsigned char Dis_Second_High=0;unsigned char Dis_Second_Low=0 ;unsigned char Dis_Minute_High=0;unsigned char Dis_Minute_Low=0 ;Dis_Minute_High=Minute/10;Dis_Minute_Low=Minute%10;Dis_Second_Low=Second%10;Dis_Second_High=Second/10; P0=0xfe;Seg_Position_Select=1;Seg_Position_Select=0;P0=Table[Dis_Minute_High]; Seg_Code_Select=1;Seg_Code_Select=0; DelayTime_10ms(1);P0=0xfd;Seg_Position_Select=1;Seg_Position_Select=0;P0=Table[Dis_Minute_Low]; Seg_Code_Select=1;Seg_Code_Select=0; DelayTime_10ms(1);P0=0xFb;Seg_Position_Select=1;Seg_Position_Select=0;P0=0X40;Seg_Code_Select=1;Seg_Code_Select=0; DelayTime_10ms(1);//////////////////////////////////P0=0xf7;Seg_Position_Select=1;Seg_Position_Select=0;P0=0X40;Seg_Code_Select=1;Seg_Code_Select=0; DelayTime_10ms(1);P0=0xef;Seg_Position_Select=1;Seg_Position_Select=0;P0=Table[Dis_Second_High]; Seg_Code_Select=1;Seg_Code_Select=0; DelayTime_10ms(1);P0=0xdf;Seg_Position_Select=1;Seg_Position_Select=0;P0=Table[Dis_Second_Low]; Seg_Code_Select=1;Seg_Code_Select=0;DelayTime_10ms(1);}int Count=0;void main(){int i=0;TMOD=0x10;TH1=0x3c;TL1=0xb0;TR1=1;EA=1;ET1=1;while(1){Display();}}void Timer1_Irq() interrupt 3 {TH1=0x3c;TL1=0xb0;Count++;if(Count==20){Second--;if(Second==0xff){Second=59;if(Minute--==0){Second=Minute=0;}}Count=0;}}。
单片机程序100范例+详细注释

100例程序设计范例汇总第一章 (4)【实例1】使用累加器进行简单加法运算: (4)【实例2】使用B寄存器进行简单乘法运算: (4)【实例3】通过设置RS1,RS0选择工作寄存器区1: (4)【实例4】使用数据指针DPTR访问外部数据数据存储器: (4)【实例5】使用程序计数器PC查表: (4)【实例6】IF语句实例: (4)【实例7】SWITCH-CASE语句实例: (4)【实例8】FOR语句实例: (4)【实例9】WHILE语句实例: (5)【实例10】DO...WHILE语句实例: . (5)【实例11】语句形式调用实例: (5)【实例12】表达式形式调用实例: (5)【实例13】以函数的参数形式调用实例: (5)【实例14】函数的声明实例: (5)【实例15】函数递归调用的简单实例: (5)【实例16】数组的实例: (6)【实例17】指针的实例: (6)【实例18】数组与指针实例: (6)【实例19】P1口控制直流电动机实例 (6)第二章 (8)【实例20】用74LS165实现串口扩展并行输入口 (8)【实例21】用74LS164实现串口扩展并行输出口 (10)【实例22】P0I/O扩展并行输入口 (12)【实例23】P0I/O扩展并行输出口 (12)【实例24】用8243扩展I/O端口 (12)【实例25】用8255A扩展I/O口 (14)【实例26】用8155扩展I/O口 (19)第三章 (26)【实例29】与AT24系列EEPROM接口及驱动程序 (26)【实例30】EEPROM(X5045)接口及驱动程序 (30)【实例31】与铁电存储器接口及驱动程序 (33)【实例32】与双口RAM存储器接口及应用实例 (35)【实例33】与NANDFLASH(K9F5608)接口及驱动程序 (35)第四章 (43)【实例34】独立键盘控制 (43)【实例35】矩阵式键盘控制 (44)【实例36】改进型I/O端口键盘 (46)【实例37】PS/2键盘的控制 (49)【实例39】段数码管(HD7929)显示实例 (54)【实例40】16×2字符型液晶显示实例 (55)【实例41】点阵型液晶显示实例 (61)【实例42】LCD显示图片实例 (63)第五章 (70)【实例43】简易电子琴的设计 (70)【实例44】基于MCS-51单片机的四路抢答器 (71)【实例45】电子调光灯的制作 (76)【实例46】数码管时钟的制作 (81)【实例47】LCD时钟的制作 (96)【实例48】数字化语音存储与回放 (103)【实例49】电子标签设计 (112)第六章 (120)【实例50】指纹识别模块 (121)【实例51】数字温度传感器 (121)第七章 (124)【实例53】超声波测距 (124)【实例54】数字气压计 (125)【实例55】基于单片机的电压表设计 (132)【实例56】基于单片机的称重显示仪表设计 (133)【实例57】基于单片机的车轮测速系统 (136)第八章 (138)【实例58】电源切换控制 (138)【实例59】步进电机控制 (140)【实例60】单片机控制自动门系统 (141)【实例61】控制微型打印机 (144)【实例62】单片机控制的EPSON微型打印头 (144)【实例63】简易智能电动车 (145)【实例64】洗衣机控制器 (149)第九章 (152)【实例65】串行A/D转换 (152)【实例66】并行A/D转换 (153)【实例67】模拟比较器实现A/D转换 (154)【实例68】串行D/A转换 (155)【实例69】并行电压型D/A转换 (156)【实例70】并行电流型D/A转换 (156)【实例71】2I C接口的A/D转换 (157)【实例72】2I C接口的D/A转换 (161)【实例73】单片机间双机通信 (164)【实例74】单片机间多机通信方法之一 (166)【实例75】单片机间多机通信方法之二 (171)【实例76】PC与单片机通信 (176)【实例77】红外通信接口 (178)第十一章 (180)【实例79】单片机实现PWM信号输出 (180)【实例80】实现基于单片机的低频信号发生器 (182)【实例81】软件滤波方法 (183)【实例82】FSK信号解码接收 (186)【实例83】单片机浮点数运算实现 (187)【实例84】神经网络在单片机中的实现 (192)【实例85】信号数据的FFT变换 (194)第十二章 (198)【实例86】2I C总线接口的软件实现 (198)【实例87】SPI总线接口的软件实现 (200)【实例88】1-WIRE总线接口的软件实现 (205)【实例89】单片机外挂CAN总线接口 (207)【实例90】单片机外挂USB总线接口 (210)【实例91】单片机实现以太网接口 (214)【实例92】单片机控制GPRS传输 (221)【实例93】单片机实现TCP/IP协议 (223)第十三章 (229)【实例94】读写U盘 (229)【实例95】非接触IC卡读写 (234)【实例96】SD卡读写 (238)【实例97】高精度实时时钟芯片的应用 (242)第十四章 (247)【实例98】智能手机充电器设计 (247)【实例99】单片机控制门禁系统 (248)第一章【实例1】使用累加器进行简单加法运算:MOV A,#02H ;A←2ADD A,#06H ;A←A+06H【实例2】使用B寄存器进行简单乘法运算:MOV A,#02H ; A←2MOV B,#06H ; B←6MUL AB ; BA←A*B=6*2【实例3】通过设置RS1,RS0选择工作寄存器区1:CLR PSW.4 ; PSW.4←0SETB PSW.5 ; PSW.5←1【实例4】使用数据指针DPTR访问外部数据数据存储器:MOV DPTR, #data16 ; DPTR←data16MOVX A, @ DPTR ; A←((DPTR))MOVX @ DPTR, A ; (DPTR)←A【实例5】使用程序计数器PC查表:MOV A, #data ;A←dataMOVC A, @ A+DPTR ; PC←(PC)+1 ,A←((A)+(PC)) 【实例6】if语句实例:void main(){ int a,b,c,min;printf("\n please input three number:");scanf("%d%d%d ",&a,&b,&c);if(a<b&&a<c) printf("min=%d\n",a );else if(b<a&&b<c) printf("min=%d\n",b);else if(c<a&&c<c) printf("min=%d\n",c);else printf("There at least two numbers are equal\n");}【实例7】switch-case语句实例:void main(){ int num; printf("input one number:");scanf("%d",& num);switch(num){ case 1: printf("num =%d\n", num);break;case 2: printf("num =%d\n", num);break;case 3: printf("num =%d\n", num);break;case 4: printf("num =%d\n", num);break;default: printf("The number is out of the range\n", num);}}【实例8】for语句实例:void main(){ for(int a=10;n>0;a --)printf("%d",a);}【实例9】while语句实例:void main(){ int i=0;while(i<=10) i++;}【实例10】do…while语句实例:void main(){ int i=0;do{ i++;}while(i<=10);}【实例11】语句形式调用实例:void main(){ int i=0; while(i<=10) i++; ……Sum(); /*函数调用*/}【实例12】表达式形式调用实例:void main(){ int a,b,i=0; while(i<=10) i++; ……i=4*Sum(a,b); /*函数调用*/}【实例13】以函数的参数形式调用实例:void main(){ int a,b,c,i=0; while(i<=10) i++; ……i= max(c,Sum(a,b)); /*函数调用*/ }【实例14】函数的声明实例:void main(){ int max(int x,int y); /*函数的声明*/ int a,b,c,i=0; while(i<=10) i++; ……i= max(c,Sum(a,b)); /*函数调用*/ }【实例15】函数递归调用的简单实例:void fun(){ int a=1, result,i;for(i=0;i<10;){ i=a+I;result = fun(); /*函数调用*/}return result;}【实例16】数组的实例:void main(){ char num[3] [3]={{ '','#',''},{'#','','#'},{'','#',''}}; /*定义多维数组*/ int i=0,j=0;for(;i<3;i++){ for(;j<3;j++) printf(“%c”,num[i][j]);printf(“/n”);}【实例17】指针的实例:void main(){ int a=3,*p;p=&a; /*将变量a的地址赋值给指针变量p*/printf(“%d,%d”,a,*p); /*输出二者的数值进行对比*/}【实例18】数组与指针实例:void main(){ int i=3,num[3]={1,2,3},*p;p=num; /*将数组num[]的地址赋值给指针变量p*/result =max(p,3); /*函数调用,计算数组的最大值*/}【实例19】P1口控制直流电动机实例sfr p1=0x90;sbit p10=p1^0;sbit p11=p1^1;void main (){int i, m;int j=100;int k=20;// 正快转for (i=0; i<100; i++){P10=1;for (j=0; j<50; j++){m=0;}}P10=0;for (j=0; j<10; j++){m=0}//正慢转for (i=0; i<100; i++) {P10=1;for (j=0; j<10; j++) {m=0}}p10=0;for (j=0; j<50; j++) {m=0}// 负快转for (i=0; i<100; i++) {p11=1;for (j=0; j<50; j++) {m=0;}}p11=0;for (j=0; j<10; j++) {m=0;}// 负慢转for (i=0; i<100; i++) {p11=1;for (j=0;j<10;j++) {m=0;}}p11=0for (j=0; j<50; j++) {m=0;}}第二章【实例20】用74LS165实现串口扩展并行输入口(1)函数声明管脚定义//---------------------------------------库函数声明,管脚定义------------------------------------------ #include<reg52.h>sbit LOAD=P1^7;//用P1^7控制SH/ 管脚(2)串口初始化函数UART_init()//-------------------------------------------------------------------------------------------------------------- // 函数名称:UART_init()// 功能说明:串口初始化,设定串口工作在方式0//-------------------------------------------------------------------------------------------------------------- void UART_init(void){SCON=0x10;//设串行口方式0,允许接收,启动接收过程ES=0;//禁止串口中断}(3)数据接收函数PA()//-------------------------------------------------------------------------------------------------------------- // 函数名称:PA()// 输入参数:无// 输出参数:返回由并口输入的数据// 功能说明:接收八位串行数据//-------------------------------------------------------------------------------------------------------------- unsigned char PA(void){unsigned char PA_data;LOAD=0;//当P1.7输出低电平,74LS165将并行数据装入寄存器//当中LOAD=1;//当P1.7输出高电平,74LS165在时钟信号下进行移位UART_init();//74LS165工作在时钟控制下的串行移位状态while(RI==0);//循环等待RI=0;PA_data=SBUF;return PA_data;//返回并行输入的数据}(1)函数声明管脚定义//---------------------------------------库函数声明,管脚定义------------------------------------------ #include<reg52.h>sbit a7=ACC^7;sbit simuseri_CLK=P1^6;//用P1^6模拟串口时钟sbit simuseri_DATA=P1^5;//用P1^5模拟串口数据sbit drive74165_LD=P1^7;//用P1^7控制SH/ 管脚(2)数据输入函数in_simuseri()//-------------------------------------------------------------------------------------------------------------- // 函数名称:in_simuseri()// 输入参数:无// 输出参数:data_buf// 功能说明:8位同位移位寄存器,将simuseri_DATA串行输入的数据按从低位到// 高位// 保存到data_buf//-------------------------------------------------------------------------------------------------------------- unsigned char in_simuseri(void){unsigned char i;unsigned char data_buf;i=8;do{ACC=ACC>>1;for(;simuseri_CLK==0;);a7= simuseri_DA TA;for(;simuseri_CLK==1;);}while(--i!=0);simuseri_CLK=0;data_buf=ACC;return(data_buf);}(3)数据输出函数PAs()//-------------------------------------------------------------------------------------------------------------- // 函数名称:PAs()// 输入参数:无// 输出参数:PAs _buf,返回并行输入74LS165的数据// 功能说明:直接调用,即可读取并行输入74LS165的数据,不需要考虑74LS165的// 工作原理//--------------------------------------------------------------------------------------------------------------unsigned char PAs(void){unsigned char PAs_buf;drive74165_LD=0;drive74165_LD=1;PAs_buf= in_simuseri();return(PAs_buf);}【实例21】用74LS164实现串口扩展并行输出口单片机串口驱动74LS164的程序主要包括函数声明管脚定义部分、串口初始化函数以及数据发送函数。
单片机程序大全

第1题:i/o口,int0外部中断,停止继续ORG 0000HLJMP S TARTORG 0003HLJMP P INT0ORG 001BHLJMP P TI1START: MOV TMOD,#10HMOV SCON,#00HMOV TH1,#03CHMOV TL1,#0B0HMOV R4,#00HMOV R5,#10MOV DPTR,#TABSETB E ASETB E X0SETB I T0SETB E T1SETB T R1DISP: MOV A,R4MOV B,#10DIV ABMOVC A,@A+DPTRMOV SBUF,ALCALL DELAYJNB TI,$CLR TISETB P1.0CLR P1.1MOV A,BMOVC A,@A+DPTRMOV SBUF,ALCALL DELAYJNB TI,$CLR TISETB P1.1CLR P1.0LJMP D ISPPTI1: DJNZ R5,JIXUMOV R5,#10INC R4CJNE R4,#61,JIXUMOV R4,#0JIXU: MOV TH1,#03CHMOV TL1,#0B0HRETIPINT0:CPL TR1RETIDELAY:MOV R1,#200DJNZ R1,$RETTAB: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H, 7FH,6FHEND外驱第2题:i/o口,延时0.5秒,0—ff Int0外部中断,停止继续ORG 0000HLJMP STARTORG 0003HLJMP INTV1ORG 001BHLJMP TIME1START:MOV TMOD,#10HMOV SCON,#00HSETB EX0SETB IT0SETB EAMOV TH1,#3CHMOV TL1,#0B0HSETB ET1SETB TR1SETB EAMOV R4,#0MOV R5,#10CLR P1.0CLR P1.1BBB:SETB P1.0MOV DPTR,#TABMOV A,R4ANL A,#0FHMOVC A,@A+DPTRMOV SBUF,ALCALL DELAYCLR P1.0SETB P1.1MOV A,R4SWAP AANL A,#0FHMOVC A,@A+DPTRMOV SBUF,ALCALL DELAYCLR P1.1SJMP BBBDELAY:MOV R3,#200DJNZ R3,$RET TIME1:DJNZ R5,AAAMOV R5,#10INC R4CJNE R4,#0FFH,AAAMOV R4,#00HAAA: MOV TH1,#3CHMOV TL1,#0B0HSETB TR1RETIINTV1:CPL TR1RETITAB:DB3FH,06H,5BH,4FH,66H,6DH,7DH,07H DB 7FH,6FH,77H,7CH,39H,5EH,79H,71HEND外驱第4题:定时器Ti工作在技术方式。
单片机程序大全

独立按键#include<reg52。
h>#define uchar unsigned char#define uint unsigned intsbit P27=P2^7;sbit K5=P1^4;sbit fmq=P3^6;uchar num;unsigned char code s8[16]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e};void delay1ms(uint i){uchar j;while(i—-){for(j=0;j<115;j++) //1ms基准延时程序{;}}}void beep() //产生1KHZ频率声音的函数{fmq=0;delay500us();fmq=1;delay500us();}void delay500us(){unsigned char j;for(j=0;j<57;j++) //500us基准延时程序 {;}}void main(){ uchar t;P27=0;while(1){if(K5==0){delay1ms(15);if(K5==0){for(t=0;t〈100;t++){ beep();}num=num+1;if(num==16){num=0;}while(!K5);//等待按键释放}}P0=s8[num];}}#include<reg52.h>#define uchar unsigned char //数据类型的宏定义#define uint unsigned int //数据类型的宏定义sbit P27=P2^7;unsigned char code table[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0x88,0x83,0xC6,0xA1,0x86,0x8E,0xBF};//共阳数码管显示字型码数组 1011 1111 "—”void delay1ms(uint i){uchar j;while(i--){for(j=0;j<115;j++); //1ms基准延时程序}}void display(unsigned char i){P27=0; //选通最有端的数码管显示P0=table[i]; //显示i参数传来的字型码}void main(void){unsigned char temp;display(16); //初始显示 "-"while(1){P1=0xff; //先向P1口写1;端口读状态P1=0xf0;temp=P1;if(temp!=0xf0){delay1ms(15);if(temp!=0xf0){P1=0xfe;temp=P1;switch(temp){case(0xee):display(0);break;case(0xde):display(1);break;case(0xbe):display(2);break;case(0x7e):display(3);break;}P1=0xfd;temp=P1;switch(temp){case(0xed):display(4);break;case(0xdd):display(5);break;case(0xbd):display(6);break;case(0x7d):display(7);break;}P1=0xfb;temp=P1;switch(temp){case(0xeb):display(8);break;case(0xdb):display(9);break;case(0xbb):display(10);break;case(0x7b):display(11);break;}P1=0xf7;temp=P1;switch(temp){case(0xe7):display(12);break;case(0xd7):display(13);break;case(0xb7):display(14);break;case(0x77):display(15);break;}}}}}/*行线接P1.0-P1。
单片机程序
1.用C51实现片内RAM的30H和31H地址单元中的数据相加,保存到32H单元中。
#include <absacc.h>#define a DBYTE[0x30]#define b DBYTE[0x31]#define c DBYTE[0x32]void main( ){c=a+b;}2.用C51语言实现给片内RAM的30H地址单元赋值为CDH(内存赋值)。
#include <absacc.h>#define a DBYTE[0x30]void main( ){a=0xCD;}3.编写程序,将单片机片外2000H为首地址的连续10个单元的内容,读入到片内RAM的40H~49H单元中。
#include <absacc.h>.void main( ){unsigned char i;for(i=0;1<10;i++){XBYTE[0x2000+i]=i;DBYTE[0x40+i]=XBYTE[0x2000+i];}}4.有符号数比较大小假设在片内RAM的30H单元中,储存的有符号数据是m,在片内RAM的30H 中存储的有符号数是n,比较这两个数的大小,并将较大的数保存在片内RAM的30H单元中,较小的数保存在片内RAM的31H单元中。
#incliude <absacc.h>#define m DBYTE[0x30]#define n DBYTE[0x31]#define a DBYTE[0x32]void main( ){m=-6;n=-5;if(m<n){a=m;m=n;n=a;}5.比较大小将片内RAM的30H~39H单元中的数据分别赋值成0~9,然后对其进行比较,将最大值存入片内3AH的单元中。
#include <absacc.h>void main( ){unsigned char i;for(i=0;i<10;i++)DBYTE[0x30+i]=i;DBYTE[0x3a]= DBYTE[0x30];for(i=0;i<10;i++)if(DBYTE[0x3a]<DBYTE[0x30+i])DBYTE[0x3a]=DBYTE[0x30+i];}6.ASCII码16进制数若一个十六进制数的ASCII码,存于片内RAM的30H单元,请把该ASCII码对应十六进制数,存于片内RAM的31H单元中。
单片机的一些常用程序

单片机复习程序1、从左到右的流水灯/* 名称:从左到右的流水灯说明:接在P0 口的8 个LED从左到右循环依次点亮,产生走马灯效果*/#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){P0=0xfe;while(1){P0=_crol_(P0,1); //P0 的值向左循环移动DelayMS(150);}}2、交通灯/* 名称:LED 模拟交通灯说明:东西向绿灯亮若干秒,黄灯闪烁5 次后红灯亮,红灯亮后,南北向由红灯变为绿灯,若干秒后南北向黄灯闪烁5 此后变红灯,东西向变绿灯,如此重复。
*/#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit RED_A=P0^0; //东西向灯sbit YELLOW_A=P0^1;sbit GREEN_A=P0^2;sbit RED_B=P0^3; //南北向灯sbit YELLOW_B=P0^4;sbit GREEN_B=P0^5;uchar Flash_Count=0,Operation_Type=1; //闪烁次数,操作类型变量//延时void DelayMS(uint x){uchar i;while(x--) for(i=0;i<120;i++);}//交通灯切换void Traffic_Light(){switch(Operation_Type){case 1: //东西向绿灯与南北向红灯亮RED_A=1;YELLOW_A=1;GREEN_A=0;RED_B=0;YELLOW_B=1;GREEN_B=1;DelayMS(2000);Operation_Type=2;break;case 2: //东西向黄灯闪烁,绿灯关闭DelayMS(300);YELLOW_A=~YELLOW_A;GREEN_A=1; if(++Flash_Count!=10) return; //闪烁5 次Flash_Count=0;Operation_Type=3;break;case 3: //东西向红灯,南北向绿灯亮RED_A=0;YELLOW_A=1;GREEN_A=1; RED_B=1;YELLOW_B=1;GREEN_B=0; DelayMS(2000);Operation_Type=4;break;case 4: //南北向黄灯闪烁5 次DelayMS(300);YELLOW_B=~YELLOW_B;GREEN_B=1; if(++Flash_Count!=10) return;Flash_Count=0;Operation_Type=1;}}//主程序void main(){while(1) Traffic_Light();}3、定时器控制交通指示灯/* 名称:定时器控制交通指示灯说明:东西向绿灯亮5s 后,黄灯闪烁,闪烁5 次亮红灯,红灯亮后,南北向由红灯变成绿灯,5s 后南北向黄灯闪烁,闪烁5 次后亮红灯,东西向绿灯亮,如此往复。
单片机程序大全
单片机程序大全(以下是一个以“单片机程序大全”为题目的文章范例,依据题目性质并非一个合同或作文的格式。
请注意,这个范例只是为了明示写作格式的变化,并非提供一个实际的单片机程序大全。
)单片机程序大全本文将为大家提供一个全面的单片机程序大全,涵盖了各种常见的单片机应用。
希望本文能够对单片机程序的学习和实践有所帮助。
一、LED灯程序LED灯是一个常见的单片机实验项目。
以下是一个基本的LED灯闪烁程序的代码,使用C语言编写:```c#include <reg51.h>#define LED P0void delay(int time) {int i, j;for (i = 0; i < time; i++) {for (j = 0; j < 10000; j++) {; // 空循环,用于延时}}}void main() {while (1) {LED = 0xFF; // 所有LED灯亮delay(1000); // 延时1秒LED = 0x00; // 所有LED灯灭delay(1000); // 延时1秒}}```二、温度监测程序单片机可以用于温度监测,以下是一个简单的温度监测程序的代码示例,使用C语言编写:```c#include <reg51.h>#define TEMP P1void delay(int time) {int i, j;for (i = 0; i < time; i++) {for (j = 0; j < 10000; j++) {; // 空循环,用于延时}}}void main() {while (1) {if (TEMP > 30) {P0 = 0x01; // 温度过高,亮起警示灯 } else {P0 = 0x00; // 温度正常,灭掉警示灯 }delay(100); // 延时0.1秒}}```三、电机控制程序单片机常用于电机控制,以下是一个电机正反转控制程序的代码示例,使用C语言编写:```c#include <reg51.h>#define MOTOR P2void delay(int time) {int i, j;for (i = 0; i < time; i++) {for (j = 0; j < 10000; j++) {; // 空循环,用于延时}}}void main() {while (1) {MOTOR = 0x01; // 电机正转delay(1000); // 延时1秒MOTOR = 0x02; // 电机反转delay(1000); // 延时1秒}}```以上仅是三个简单的单片机程序示例,单片机的应用非常广泛,包括但不限于LED灯闪烁、温度监测、电机控制等。
单片机程序大全(29页)

单片机程序大全(29页)在单片机程序设计领域,有许多常用的程序,可以用于各种不同的应用。
本文将为您介绍一些常见的单片机程序,并提供相应的代码示例。
这些程序将涵盖从基本的输入/输出操作到复杂的控制算法。
无论您是初学者还是有一定经验的开发人员,我们相信本文都会对您有所帮助。
I. LED控制程序LED控制程序是单片机程序设计的基础,也是许多初学者的入门项目。
下面是一个简单的LED控制程序示例:```c#include <reg51.h>void delay(unsigned int milliseconds) {unsigned int i, j;for(i = 0; i < milliseconds; i++) {for(j = 0; j < 1000; j++);}}void main() {while(1) {P1 = 0xFF; // 将P1口的所有引脚设置为高电平(点亮LED)delay(1000); // 延时1秒P1 = 0x00; // 将P1口的所有引脚设置为低电平(熄灭LED)delay(1000); // 延时1秒}}```上述程序通过控制单片机的I/O口,实现了LED的闪烁效果。
其中,`delay`函数用于延时一定的时间,通过循环等待的方式实现。
II. 温度传感器数据采集程序许多实际应用中,我们需要使用温度传感器来采集环境温度数据。
下面是一个简单的温度传感器数据采集程序示例:```c#include <reg51.h>unsigned char readTemperature() {unsigned char temperature;// 温度传感器数据采集代码...// 在此省略实际的数据采集操作,以及与温度传感器通信的代码 // 假设最终采集到的温度数据存储在temperature变量中return temperature;}void main() {unsigned char temperature;while(1) {temperature = readTemperature();// 对温度数据进行处理和显示的代码...// 在此省略实际的数据处理和显示操作,以及与显示设备通信的代码}}```上述程序通过`readTemperature`函数模拟温度传感器的数据采集,并将采集到的温度数据存储在`temperature`变量中。
单片机的40个程序
名称:定时器0#include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义sbit LED=P1^2; //定义LED端口/*-----------------------定时器初始化子程序------------*/void Init_Timer0(void){TMOD |= 0x01; //使用模式1,16位定时器,使用"|"符号可以在使用多个定时器时不受影响TH0=0x00; //给定初值,这里使用定时器最大值从0开始计数一直到65535溢出TL0=0x00;EA=1; //总中断打开ET0=1; //定时器中断打开TR0=1; //定时器开关打开}/*--------主程序-----------*/main(){Init_Timer0();while(1);}/*--------- 定时器中断子程序--------*/void Timer0_isr(void) interrupt 1 using 1{TH0=0x00; //重新赋值TL0=0x00;LED=~LED; //指示灯反相,可以看到闪烁}/*---------- 名称:定时器1----*/#include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义sbit LED=P1^2; //定义LED端口/*---定时器初始化子程序----*/void TIM2Inital(void){RCAP2H = (65536-60000)/256;//晶振12M 10ms 16bit 自动重载RCAP2L = (65536-60000)%256;ET2=1; //打开定时器中断EA=1; //打开总中断TR2=1; //打开定时器开关}/*-----主程序---*/main(){TIM2Inital();while(1);}/*--------定时器中断子程序-----*/void TIM2(void) interrupt 5 using 1//定时器2中断{TF2=0;LED=~LED; //指示灯反相}名称:外部中断0电平触发#include<reg52.h>/*------主程序-*/main(){P1=0x55; //P1口初始值EA=1; //全局中断开EX0=1; //外部中断0开IT0=0; //电平触发while(1){//在此添加其他程序}}/*---------外部中断程序--------*/void ISR_Key(void) interrupt 0 using 1{P1=~P1;}名称:外部中断1#include<reg52.h>main(){P1=0x55; //P1口初始值EA=1; //全局中断开EX1=1; //外部中断0开IT1=1; //边沿触发,IT1=0表示电平触发while(1){//在此添加其他程序}}/*-------外部中断程序-*/void ISR_Key(void) interrupt 2 using 1{//在此处可以添加去抖动程序,防止按键抖动造成错误P1=~P1;}名称:遥控器红外解码LCD1602液晶显示#include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的#include<stdio.h>#include<intrins.h>#define TURE 1#define FALSE 0sbit IR=P3^2; //红外接口标志sbit RS = P2^4;//Pin4sbit RW = P2^5;//Pin5sbit E = P2^6;//Pin6#define Data P0//数据端口unsigned int hour,minute,second,count;char code Tab[16]="0123456789ABCDEF";char data TimeNum[]=" ";char data Test1[]=" ";/* 变量声明*/unsigned char irtime;//红外用全局变量bit irpro_ok,irok;unsigned char IRcord[4]; //处理后的红外码,分别是客户码,客户码,数据码,数据码反码unsigned char irdata[33]; //33个高低电平的时间数据/* 函数声明*/void Ir_work(void);void Ircordpro(void);void ShowString (unsigned char line,char *ptr);/* 定时器0中断服务函数*/void tim0_isr (void) interrupt 1 using 1//定时器0中断服务函数{irtime++; //用于计数2个下降沿之间的时间}/* 外部中断0函数*/void ex0_isr (void) interrupt 0 using 0//外部中断0服务函数{static unsigned char i; //接收红外信号处理static bit startflag; //是否开始处理标志位if(startflag){if(irtime<63&&irtime>=33)//引导码TC9012的头码,9ms+4.5msi=0;irdata[i]=irtime;//存储每个电平的持续时间,用于以后判断是0还是1irtime=0;i++;if(i==33){irok=1;i=0;}}else{irtime=0;startflag=1;}}/* 定时器0初始化*/void TIM0init(void)//定时器0初始化{TMOD=0x02;//定时器0工作方式2,TH0是重装值,TL0是初值TH0=0x00; //重载值TL0=0x00; //初始化值ET0=1; //开中断TR0=1;}/* 外部中断初始化*/void EX0init(void){IT0 = 1; //指定外部中断0下降沿触发,INT0 (P3.2)EX0 = 1; //使能外部中断EA = 1; //开总中断}/* 红外键值处理*/void Ir_work(void) //红外键值散转程序{TimeNum[5] = Tab[IRcord[0]/16]; //处理客户码并显示TimeNum[6] = Tab[IRcord[0]%16];TimeNum[8] = Tab[IRcord[1]/16]; //处理客户码并显示TimeNum[9] = Tab[IRcord[1]%16];TimeNum[11] = Tab[IRcord[2]/16]; //处理数据码并显示TimeNum[12] = Tab[IRcord[2]%16];TimeNum[14] = Tab[IRcord[3]/16]; //处理数据反码并显示TimeNum[15] = Tab[IRcord[3]%16];ShowString(1,TimeNum);//显示处理过后的码值irpro_ok=0; //处理完成后清楚标志位}/* 红外解码函数处理*/void Ircordpro(void)//红外码值处理函数{unsigned char i, j, k;unsigned char cord,value;k=1;for(i=0;i<4;i++) //处理4个字节{for(j=1;j<=8;j++) //处理1个字节8位{cord=irdata[k];if(cord>7)//大于某值为1,这个和晶振有绝对关系,这里使用12M计算,此值可以有一定误差{value=value|0x80;}else{value=value;}if(j<8){value=value>>1;}k++;}IRcord[i]=value;value=0;} irpro_ok=1;//处理完毕标志位置1}/* 微秒延时函数*/void DelayUs(unsigned char us)//delay us{unsigned char uscnt;uscnt=us>>1;/* Crystal frequency in 12MHz*/while(--uscnt);}/* 毫秒函数声明*/void DelayMs(unsigned char ms)//delay Ms{while(--ms){DelayUs(250);DelayUs(250);DelayUs(250);DelayUs(250);}}/* 写入命令函数*/void WriteCommand(unsigned char c){DelayMs(5);//操作前短暂延时,保证信号稳定E=0;RS=0;RW=0;_nop_();E=1;Data=c;E=0;}/*写入数据函数*/void WriteData(unsigned char c){DelayMs(5); //操作前短暂延时,保证信号稳定E=0;RS=1;RW=0;_nop_();E=1;Data=c;E=0;RS=0;}/*写入字节函数*/void ShowChar(unsigned char pos,unsigned char c) {unsigned char p;if (pos>=0x10)p=pos+0xb0; //是第二行则命令代码高4位为0xc elsep=pos+0x80; //是第二行则命令代码高4位为0x8 WriteCommand (p);//写命令WriteData (c); //写数据}/*写入字符串函数*/void ShowString (unsigned char line,char *ptr){unsigned char l,i;l=line<<4;for (i=0;i<16;i++)ShowChar (l++,*(ptr+i));//循环显示16个字符}/* 初始化函数*/void InitLcd(){DelayMs(15);WriteCommand(0x38); //display modeWriteCommand(0x38); //display modeWriteCommand(0x38); //display modeWriteCommand(0x06); //显示光标移动位置WriteCommand(0x0c); //显示开及光标设置WriteCommand(0x01); //显示清屏}/*主函数*/void main(void){EX0init(); //初始化外部中断TIM0init();//初始化定时器InitLcd(); //初始化液晶DelayMs(15);sprintf(Test1," "); //显示第一行固定信息ShowString(0,Test1);sprintf(TimeNum,"Code ");//显示第二行固定信息ShowString(1,TimeNum);while(1)//主循环{if(irok) //如果接收好了进行红外处理{Ircordpro();irok=0;}if(irpro_ok) //如果处理好后进行工作处理,如按对应的按键显示对应的数字等{Ir_work();}}}/*-----------------------------------------------名称:遥控器红外解码数码管显示#include<reg52.h>#include<stdio.h>#include<intrins.h>#define TURE 1#define FALSE 0sbit IR=P3^2; //红外接口标志unsigned char const dofly[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};/*变量声明*/unsigned char irtime;//红外用全局变量bit irpro_ok,irok;unsigned char IRcord[4];unsigned char irdata[33];/* 函数声明*/void Delay(unsigned char mS);void Ir_work(void);void Ircordpro(void);/*定时器0中断服务函数*/void tim0_isr (void) interrupt 1 using 1//定时器0中断服务函数{irtime++; //用于计数2个下降沿之间的时间}/*外部中断0函数*/void ex0_isr (void) interrupt 0 using 0//外部中断0服务函数{static unsigned char i; //接收红外信号处理static bit startflag; //是否开始处理标志位if(startflag){if(irtime<63&&irtime>=33)//引导码TC9012的头码,9ms+4.5msi=0;irdata[i]=irtime;//存储每个电平的持续时间,用于以后判断是0还是1irtime=0;i++;if(i==33){irok=1;i=0;}}else{irtime=0;startflag=1;}}/* 定时器0初始化*/void TIM0init(void)//定时器0初始化{TMOD=0x02;//定时器0工作方式2,TH0是重装值,TL0是初值TH0=0x00; //重载值TL0=0x00; //初始化值ET0=1; //开中断TR0=1;}/*外部中断初始化*/void EX0init(void){IT0 = 1; //指定外部中断0下降沿触发,INT0 (P3.2)EX0 = 1; //使能外部中断EA = 1; //开总中断}/*红外键值处理*/void Ir_work(void)//红外键值散转程序{switch(IRcord[2])//判断第三个数码值{case 0:P0=dofly[1];break;//1 显示相应的按键值case 1:P0=dofly[2];break;//2case 2:P0=dofly[3];break;//3case 3:P0=dofly[4];break;//4case 4:P0=dofly[5];break;//5case 5:P0=dofly[6];break;//6case 6:P0=dofly[7];break;//7case 7:P0=dofly[8];break;//8case 8:P0=dofly[9];break;//9}irpro_ok=0;//处理完成标志}/* 红外解码函数处理*/void Ircordpro(void)//红外码值处理函数{unsigned char i, j, k;unsigned char cord,value;k=1;for(i=0;i<4;i++) //处理4个字节{for(j=1;j<=8;j++) //处理1个字节8位{cord=irdata[k];if(cord>7)//大于某值为1,这个和晶振有绝对关系,这里使用12M计算,此值可以有一定误差{value=value|0x80;}else{value=value;}if(j<8){value=value>>1;}k++;}IRcord[i]=value;value=0;} irpro_ok=1;//处理完毕标志位置1}void main(void){EX0init(); //初始化外部中断TIM0init();//初始化定时器P2=0x00;//1位数码管全部显示while(1)//主循环{if(irok) //如果接收好了进行红外处理{Ircordpro();irok=0;}if(irpro_ok) //如果处理好后进行工作处理,如按对应的按键后显示对应的数字等{Ir_work();}}}名称:与电脑串口通信内容:连接好串口或者usb转串口至电脑,下载该程序,打开电源打开串口调试程序,将波特率设置为9600,无奇偶校验晶振11.0592MHz,发送和接收使用的格式相同,如都使用字符型格式,在发送框输入hello,I Love MCU ,在接收框中同样可以看到相同字符,说明设置和通信正确#include<reg52.h> /void main (void){SCON = 0x50; /* SCON: 模式1, 8-bit UART, 使能接收*/ TMOD |= 0x20; /* TMOD: timer 1, mode 2, 8-bit reload */TH1 = 0xFD; /* TH1: reload value for 9600 baud @ 11.0592MHz */ TR1 = 1; /* TR1: timer 1 run */ EA = 1; /*打开总中断*/ES = 1; /*打开串口中断*/while (1) /*主循环不做任何动作*/{}}*/串口中断程序*/void UART_SER (void) interrupt 4 //串行中断服务程序{unsigned char Temp; //定义临时变量if(RI) //判断是接收中断产生{RI=0; //标志位清零Temp=SBUF; //读入缓冲区的值P1=Temp; //把值输出到P1口,用于观察SBUF=Temp; //把接收到的值再发回电脑端}if(TI) //如果是发送标志位,清零TI=0;}/*-----------------------------------------------名称:红外收发内容:*红外测试程序,用单片机通过发射管发射38K的调制频率码,由一体化接收并解码由发光管显示。
C51单片机C语言程序100例
实例66:数码时钟设计58
实例67:用LED数码管显示计数器T0的计数值62
实例68:静态显示数字“59”63
*****************************-土穴生【丨
2/192
*****************************************************/
实例99:单片机数据发送程序185
实例100:电机转速表设计186
模拟霍尔脉冲192
3/ 192
**********************************************************
**********************************************
实例52:用定时器T0控制输出高低宽度不同的矩形波
实例53:用外中断0的中断方式进行数据采集42
实例54-1:输出负脉宽为200微秒的方波43.....
实例54-2:测量负脉冲宽度43
实例55:方式0控制流水灯循环点亮44
实例56-1:数据发送程序45
实例56-2:数据接收程序47
实例57-1:数据发送程序47
//的所有内部8位特殊功能寄存器,对地址x的操作也就是对P1口的 操作
/****************************************
函数功能:延时一段时间
*****************************************/
void delay(void)
{
unsigned charij;
实例57-2:数据接收程序49
实例58:单片机向PC发送数据50
经典单片机编程100例

经典单片机编程100例单片机是指具有微处理器内核、存储器和输入输出设备的集成电路芯片。
它广泛应用于各种电子设备中,例如家用电器、汽车电子、工业自动化等领域。
单片机编程是指通过给单片机内部写入特定的指令,使其按照程序逻辑完成特定的功能。
本文将介绍经典的单片机编程实例,帮助读者更好地理解和掌握单片机编程的基本原理和技巧。
1. LED闪烁程序在单片机编程中,最简单的实例之一就是控制LED灯的闪烁。
通过设置相应的IO口为输出模式,并在循环中对该IO口进行高低电平的切换,可以实现LED的闪烁效果。
以下是一个基本的LED闪烁程序示例:```c#include <reg51.h>sbit LED = P1^0;void delay(unsigned int t){while(t--);}void main(){while(1){LED = 0; // 点亮LEDdelay(50000);LED = 1; // 熄灭LEDdelay(50000);}}```上述代码中,通过设置P1口的第0位为1或者0,控制LED的亮灭状态,并在两个状态之间加入适当的延时,从而实现LED的闪烁。
2. 按键控制LED开关在单片机编程中,常常需要通过外部输入设备来控制其他设备的状态。
例如,通过按下按钮来控制LED的开关。
以下是一个简单的按键控制LED开关的程序示例:```c#include <reg51.h>sbit LED = P1^0;sbit Key = P0^0;void delay(unsigned int t){while(t--);}void main(){while(1){if(Key==0) // 如果按键被按下{LED = ~LED; // 取反LED的状态delay(50000); // 延时一段时间,防止按键抖动 while(Key==0); // 等待按键释放}}}```上述代码中,通过检测P0口的第0位,判断是否有按键按下。
13个简单的单片机程序
/************************************************************************ * LED闪烁的简单试验 * * * 连接方法: JP11(P2)和JP1用8PIN排线连接起 来 * * * ************************************************************************ #include <reg51.h> //此文件中定义了51的一些特殊功能寄存器
TH0=(65536-3000)/256; TL0=(65536-3000)%256; TR0=1; ET0=1; EA=1; cntb=0; while(1) {; } } //开启定时0 //开启中断
/************************************************* * * 定时中断 ********************************************************/ void t0(void) interrupt 1 using 0 { TH0=(65536-3000)/256; //定时器高位装载数据 TL0=(65536-3000)%256; //定时器低位装载数据 if(cntb<18) //红色 { P1=0xFF; P2=tab[cnta]; P0=digittab[cntb][cnta]; }
void delay(unsigned int i); //声明延时函数 main() { P2 = 0x00; //置P0口为低电平 delay(600); // 延时 P2 = 0xff; //置P0口为高电平 delay(600); // 延时
单片机编程全集(含源代码)
前言 (2)基础知识:单片机编程基础 (2)第一节:单数码管按键显示 (4)第二节:双数码管可调秒表 (6)第三节:十字路口交通灯 (7)第四节:数码管驱动 (9)第五节:键盘驱动 (10)第六节:低频频率计 (15)第七节:电子表 (18)第八节:串行口应用 (19)前言本文是本人上课的一个补充,完全自写,难免有错,请读者给予指正,可发邮件到ZYZ@,或郑郁正@中国;以便相互学习。
结合课堂的内容,课堂上的部分口述内容,没有写下来;有些具体内容与课堂不相同,但方法是相通的。
针对当前的学生情况,尽可能考虑到学生水平的两端,希望通过本文都学会单片机应用。
如果有不懂的内容,不管是不是本课的内容,都可以提出来,这些知识往往代表一大部分同学的情况,但本人通常认为大家对这些知识已精通,而在本文中没有给予描述,由此影响大家的学习。
对于这些提出问题的读者,本人在此深表谢意。
想深入详细学习单片机的同学,可以参考其它有关单片机的书籍和资料,尤其是外文资料。
如果有什么问题,我们可以相互探讨和研究,共同学习。
本文根据教学的情况,随时进行修改和完善,所以欢迎同学随时注意本文档在课件中的更新情况。
基础知识:单片机编程基础单片机的外部结构:1、DIP40双列直插;2、P0,P1,P2,P3四个8位准双向I/O引脚;(作为I/O输入时,要先输出高电平)3、电源VCC(PIN40)和地线GND(PIN20);4、高电平复位RESET(PIN9);(10uF电容接VCC与RESET,即可实现上电复位)5、内置振荡电路,外部只要接晶体至X1(PIN18)和X0(PIN19);(频率为主频的12倍)6、程序配置EA(PIN31)接高电平VCC;(运行单片机内部ROM中的程序)7、P3支持第二功能:RXD、TXD、INT0、INT1、T0、T1单片机内部I/O部件:(所为学习单片机,实际上就是编程控制以下I/O部件,完成指定任务)1、四个8位通用I/O端口,对应引脚P0、P1、P2和P3;2、两个16位定时计数器;(TMOD,TCON,TL0,TH0,TL1,TH1)3、一个串行通信接口;(SCON,SBUF)4、一个中断控制器;(IE,IP)针对AT89C52单片机,头文件AT89x52.h给出了SFR特殊功能寄存器所有端口的定义。
单片机程序汇总,大家参考一下
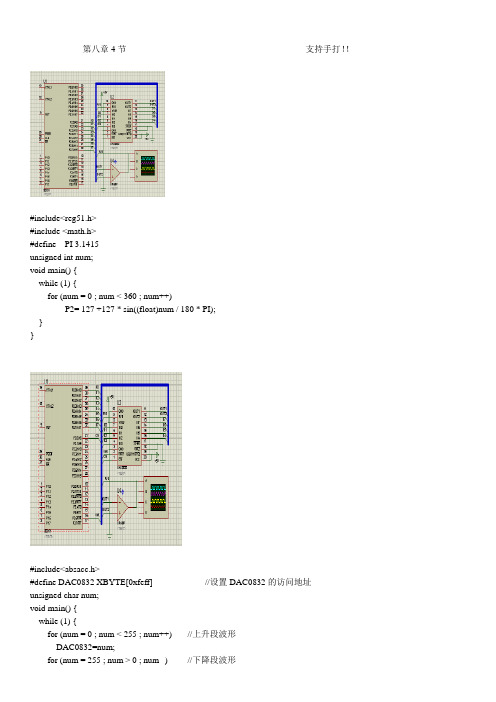
第八章4节支持手打!!#include<reg51.h>#include <math.h>#define PI 3.1415unsigned int num;void main() {while (1) {for (num = 0 ; num < 360 ; num++)P2= 127 +127 * sin((float)num / 180 * PI);}}#include<absacc.h>#define DAC0832 XBYTE[0xfeff] //设置DAC0832的访问地址unsigned char num;void main() {while (1) {for (num = 0 ; num < 255 ; num++) //上升段波形DAC0832=num;for (num = 255 ; num > 0 ; num--) //下降段波形DAC0832=num;//DAC0832转换输出}}#include<absacc.h>#include<reg51.h>#define DAC1 XBYTE[0xfeff] //设置1#DAC0832输入锁存器的访问地址#define DAC2 XBYTE[0xfdff] //设置2#DAC0832输入锁存器的访问地址#define DAOUT XBYTE[0xefff] //两个DAC0832的DAC寄存器访问地址void main (void){unsigned char num; //需要转换的数据while(1){for(num =0; num <=255; num++){DAC1 = num; //上锯齿送入1#DACDAC2 = 255-num; //下锯齿送入2#DACDAOUT = num; //两路同时进行D/A转换输出}}}/*发送程序*/#include<reg51.h>#define uchar unsigned charchar code map[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};//'0'~'9'void delay(unsigned int time){unsigned int j = 0;for(;time>0;time--)for(j=0;j<125;j++);}void main(void){uchar counter=0; //定义计数器TMOD=0x20; //T1定时方式2TH1 = TL1 = 0xf4; //2400b/sPCON=0; //波特率不加倍SCON = 0x50; //串口方式1,TI和RI清零,允许接收;TR1=1; //启动T1while(1){SBUF = counter; //发送联络信号while(TI==0); //等待发送完成TI = 0; //清TI标志位while(RI==0); //等待乙机回答RI = 0;if(SBUF ==counter){ //若返回值与发送值相同,组织新数据P2 = map[counter]; //显示已发送值if(++counter>9) counter=0;//修正计数器值delay(500);}}}/*接收程序*/#include<reg51.h>#define uchar unsigned charchar code map[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};//'0'~'9'void main(void){uchar receiv; //定义接收缓冲TMOD=0x20; //T1定时方式2TH1=TL1=0xf4; //2400b/sPCON=0; //波特率不加倍SCON=0x50; //串口方式1,TI和RI清零,允许接收;TR1=1; //启动T1while(1){while(RI==1){ //等待接收完成RI = 0; //清RI标志位receiv = SBUF; //取得接收值SBUF = receiv; //结果返送主机while(TI==0); //等待发送结束TI = 0; //清TI标志位P2 = map[receiv];//显示接收值}}}第六章方式一。
单片机程序

1、动态扫描显示程序参考如下:ORG 0000HSJMP STARTORG 0030HTEMP EQU 40HDISPL: MOV R0,#TEMP ;将TEMP开始的显示缓冲区内容扫描显示MOV R1,#4 ;显示4个单元(四个数码管)MOV R2,#1 ;初始位码送R2,先显示右边第一只数码管(设;位口接有反相器,1为点亮)DP01: MOV A,@R0MOV P0,A ;送段码到P0口MOV A,R2MOV P1,A ;送位码到P2口ACALL DELAY1 ;延时MOV A,R2RL AMOV R2,A ;下一位INC R0 ;显示缓冲区指针加1DJNZ R1,DP01RETDELAY1: MOV R4,#0HAA2: MOV R5,#01HAA3: NOPDJNZ R5,AA3DJNZ R4,AA2RETEND2、从片内RAM 60H开始存放100个数据,试统计正数、负数及零的个数,并将结果存放在50H/51H/52H单元中。
ORG 0000HAJMP MAINORG 0030HBUF EQU 60HMAIN: MOV R0, #BUFMOV R2, #100MOV 50H, #00HMOV 51H, #00HMOV 52H, #00HLOOP: MOV A, @R0 ;取数INC R0 ;地址指针加1JZ ZERO ;为0,转ZEROJNB ACC.7, POSI ; >0, 转POSINEG: INC 51H ;<0, 统计负数,(51H)+1—>51H SJMP L1POSI: INC 50HSJMP L1ZERO: INC 52HL1: DJNZ R2, LOOPEND3、从20H单元开始有一无符号数据块,其长度在20H单元。
求出数据块中的最小值并存入21H单元中。
编程如下:ORG 0000HSJMP STARTORG 0030HSTART: MOV A, 20HDEC A ;循环及比较次数为数据长度n-1MOV R2, AMOV R2, #22H ;假设数据块首地址从22H开始MOV A,@R0INC R0MIN: CLR CMOV R3, ASUBB A,@R0MOV A, R3JC L1 ;A中为小数,转L1MOV A,@R0L1: INC R0DJNZ R2, MINEND4.在从2000H开始的片外RAM中,存放着20个用ASCII码表示的数,试编程将它们转换成BCD码,并以压缩BCD码(一个单元存放2位BCD码)的形式存放在片内RAM 3000H~3009H单元中。
单片机常见程序

org 00hmain: mov P0, #0ffh ;向P0端口锁存器写0FFH,准备输入mov a, P0 ;从P0口输入数据mov P1, a ;将数据传至P1口sjmp mainend2 单片机IO-2程序org 00hmov a, #1loop: mov P1, a ;将a的内容通过P1口输出call delay ;调延时子程序rl a ; a左移一位sjmp loopdelay: mov r0, #80h ;延时子程序delay1: mov r1, #00hdelay2: djnz r1, delay2djnz r0, delay1retend3 单片机LED点阵程序ORG 0HSTART: MOV P2,#0FFH ;阳极全部加高电平MOV A,#80H ;A初值为80H,为最左一列(第7列)阴极输出低电平准备? LOOP: MOV P1,A ;使一列阴极为低电平CALL DELAY ;延时RRC A ;A右移一位,为下一列阴极输出低电平作准备JNC LOOP ;八列未完转移?CLR CMOV P1,#0FFH ;阴极全部加低电平mov a,#80h ;为最上面一行输出高电平准备LOOP1: MOV P2,A ;使一行阳极极为高电平CALL DELAY ; 延时RRC A ; A右移一位,为下一行阳极输出高电平作准备JNC LOOP1 ; 八行未完转移?CLR CAJMP STARTDELAY: MOV R1,#0C8H ;延时子程序DEY0: MOV R0,#0HDEY1: DJNZ R0,DEY1DJNZ R1,DEY0RETEndORG 0H ;显示'年?START:MOV DPTR,#DA TA1 ;指向点阵代码首址MOV R2,#80H ;80H使第7列(最左一列)阴极为低电平??CLR CDISP: MOV A,#0MOVC A,@A+DPTR ;取一列代码MOV P2,A ;加至阳极MOV P1,R2 ;使一列阴极为低电平CALL DELAY ;延时INC DPTR ;指向下一列代码?MOV A,R2 ;R2右移一位,为下一列阴极输出低电平作准备RRC A ;MOV R2,A ;JNC DISP ;8列未完,转AJMP STARTDELAY: MOV R1,#0 ;延时子程序DELY0: DJNZ R1,DEL Y0RETDA TA1: DB 24H,44H,0DCH,54H,7FH,54H,54H,44H;年的点阵代码END5 报警程序ORG 0000HLJMP MAINORG 1BHJMP T1INT ;定时器1中断入口地址ORG 0100HMAIN: MOV SP,#60HANL TMOD,#0FH ;定时器1置为方式1ORL TMOD,#10HORL IE,#88H ;允许定时器1中断MAIN1: MOV DPTR,#TONE ;置TONE表首地址MOV A,#00H ;TONE表偏移量LOOP: MOVC A,@A+DPTR ;读TONE表中的TH1值JZ MAIN1 ;为0则转MAIN1,进入下一周期MOV TH1,A ;TONE表中的高字节送TH1和R5MOV R5,AINC DPTR ;从TONE表中读出TL1的值MOV A,#00HMOVC A,@A+DPTRMOV TL1,A ;TONE表中的低字节值送TL1和R6MOV R6,ASETB TR1 ;启动定时器1INC DPTRMOV A,#00HMOVC A,@A+DPTR ;从TONE表中取出音的时间MOV R2,ALOOP1: M OV R3,#80H ;延时LOOP2: M OV R4,#0FFHDJNZ R4,$DJNZ R3,LOOP2DJNZ R2,LOOP1INC DPTR ;TONE表地址加1,指向下一个音调MOV A,#00HJMP LOOPT1INT: CPL P1.2 ;取反得到一定频率的方波,使喇叭;发出一定音高的音调CLR TR1 ;停止定时器1计数MOV TH1,R5 ;重置定时器1时间常数MOV TL1,R6SETB TR1 ;恢复定时器1计数RETITONE: DB 0FCH,46H,04H,0FCH,0AEH,04H ;音调表DB 0FDH,0BH,04H,0FDH,34H,04HDB 0FDH,83H,04H,0FDH,0C8H,04HDB 0FEH,06H,04H,0FEH,22H,04HDB 0FEH,22H,04H,0FEH,06H,04HDB 0FDH,0C8H,04H,0FDH,83H,04HDB 0FDH,34H,04H,0FDH,0BH,04HDB 0FCH,0AEH,04H,0FCH,46H,0CHDB 00H,00H,00HEND6 查询式键盘0525ORG 0000HSTART: mov P1,#0FFH ;P1端口全部置01111 1111 MOV P2,#00HMOV A,P1jnb acc.7,START ;有无键按下,直接寻址为为零则转移ANL A,#3FH ;立即数与到累加器;0011 1111CJNE A,#3FH,S1 ;比较立即数和A,不等则转移到S1 AJMP STARTS1: call delay ;延时去抖动MOV A,P1jnb acc.7,STARTANL A,#3FHcjne A,#3Eh,S2 ;0键按下0011 1110mov A,#01H ;0000 0001mov P2,Acall delay1AJMP STARTS2: cjne A,#3DH,S3 ;1键按下0011 1101 mov A,#02H ;0000 0010mov P2,Acall delay1AJMP STARTS3: cjne A,#3BH,S4 ;2键按下0011 1011 mov A,#04H ;0000 0100mov P2,Acall delay1AJMP STARTS4: cjne A,#37H,S5 ;3键按下0011 0111 mov A,#08H ;0000 1000mov P2,Acall delay1AJMP STARTS5: cjne A,#2FH,S6 ;4键按下0010 1111 mov A,#10H ;0001 0000mov P2,Acall delay1AJMP STARTS6: cjne A,#1FH,S7 ;5键按下0001 1111 mov A,#20H ;0010 0000mov P2,Acall delay1S7: AJMP STARTDELAY: MOV R6,#10H;30H ;延时子程序DE0: mov R7,#10H;30HDE1: DJNZ R7,DE1DJNZ R6,DE0RETDELAY1: MOV R4,#0FFH ;延时子程序DE2: mov R5,#0FFHDE3: DJNZ R5,DE3DJNZ R4,DE2RETEND7 电子琴KEYBUF EQU 30HSTH0 EQU 31HSTL0 EQU 32HTEMP EQU 33HORG 00HLJMP STARTORG 0BHLJMP INT_T0START: MOV TMOD,#01HSETB ET0SETB EAWAIT:MOV P3,#0FFHCLR P3.4MOV A,P3ANL A,#0FHXRL A,#0FHJZ NOKEY1LCALL DELY10MS MOV A,P3ANL A,#0FHXRL A,#0FHJZ NOKEY1MOV A,P3ANL A,#0FHCJNE A,#0EH,NK1 MOV KEYBUF,#0 LJMP DK1NK1: CJNE A,#0DH,NK2 MOV KEYBUF,#1 LJMP DK1NK2: CJNE A,#0BH,NK3 MOV KEYBUF,#2 LJMP DK1NK3: CJNE A,#07H,NK4 MOV KEYBUF,#3 LJMP DK1NK4: NOPDK1:MOV A,KEYBUFMOV DPTR,#TABLE MOVC A,@A+DPTR MOV P0,AMOV A,KEYBUFMOV B,#2MUL ABMOV TEMP,AMOV DPTR,#TABLE1 MOVC A,@A+DPTR MOV STH0,AMOV TH0,AINC TEMPMOV A,TEMPMOVC A,@A+DPTR MOV STL0,AMOV TL0,ASETB TR0DK1A: MOV A,P3ANL A,#0FHXRL A,#0FHJNZ DK1ACLR TR0NOKEY1:MOV P3,#0FFHCLR P3.5MOV A,P3ANL A,#0FHXRL A,#0FHJZ NOKEY2LCALL DELY10MS MOV A,P3ANL A,#0FHXRL A,#0FHJZ NOKEY2MOV A,P3ANL A,#0FHCJNE A,#0EH,NK5 MOV KEYBUF,#4 LJMP DK2NK5: CJNE A,#0DH,NK6 MOV KEYBUF,#5 LJMP DK2NK6: CJNE A,#0BH,NK7 MOV KEYBUF,#6 LJMP DK2NK7: CJNE A,#07H,NK8 MOV KEYBUF,#7 LJMP DK2NK8: NOPDK2:MOV A,KEYBUFMOV DPTR,#TABLE MOVC A,@A+DPTR MOV P0,AMOV A,KEYBUFMOV B,#2MUL ABMOV TEMP,AMOV DPTR,#TABLE1 MOVC A,@A+DPTR MOV STH0,AMOV TH0,AINC TEMPMOV A,TEMPMOVC A,@A+DPTR MOV STL0,AMOV TL0,ASETB TR0DK2A: MOV A,P3ANL A,#0FHXRL A,#0FHJNZ DK2ACLR TR0NOKEY2:MOV P3,#0FFHCLR P3.6ANL A,#0FHXRL A,#0FHJZ NOKEY3LCALL DELY10MSMOV A,P3ANL A,#0FHXRL A,#0FHJZ NOKEY3MOV A,P3ANL A,#0FHCJNE A,#0EH,NK9MOV KEYBUF,#8LJMP DK3NK9: CJNE A,#0DH,NK10 MOV KEYBUF,#9LJMP DK3NK10: CJNE A,#0BH,NK11 MOV KEYBUF,#10LJMP DK3NK11: CJNE A,#07H,NK12 MOV KEYBUF,#11LJMP DK3NK12: NOPDK3:MOV A,KEYBUFMOV DPTR,#TABLE MOVC A,@A+DPTR MOV P0,AMOV A,KEYBUFMOV B,#2MUL ABMOV TEMP,AMOV DPTR,#TABLE1 MOVC A,@A+DPTR MOV STH0,AMOV TH0,AINC TEMPMOV A,TEMPMOVC A,@A+DPTR MOV STL0,AMOV TL0,ASETB TR0DK3A: MOV A,P3ANL A,#0FHXRL A,#0FHJNZ DK3ACLR TR0NOKEY3:MOV P3,#0FFHCLR P3.7MOV A,P3ANL A,#0FHJZ NOKEY4LCALL DELY10MSMOV A,P3ANL A,#0FHXRL A,#0FHJZ NOKEY4MOV A,P3ANL A,#0FHCJNE A,#0EH,NK13MOV KEYBUF,#12LJMP DK4NK13: CJNE A,#0DH,NK14 MOV KEYBUF,#13LJMP DK4NK14: CJNE A,#0BH,NK15 MOV KEYBUF,#14LJMP DK4NK15: CJNE A,#07H,NK16 MOV KEYBUF,#15LJMP DK4NK16: NOPDK4:MOV A,KEYBUFMOV DPTR,#TABLE MOVC A,@A+DPTR MOV P0,AMOV A,KEYBUFMOV B,#2MUL ABMOV TEMP,AMOV DPTR,#TABLE1 MOVC A,@A+DPTR MOV STH0,AMOV TH0,AINC TEMPMOV A,TEMPMOVC A,@A+DPTR MOV STL0,AMOV TL0,ASETB TR0DK4A: MOV A,P3ANL A,#0FHXRL A,#0FHJNZ DK4ACLR TR0NOKEY4:LJMP W AITDELY10MS:MOV R6,#10D1: MOV R7,#248DJNZ R7,$DJNZ R6,D1RETINT_T0:MOV TH0,STH0MOV TL0,STL0CPL P1.0RETITABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07HDB 7FH,6FH,77H,7CH,39H,5EH,79H,71HTABLE1: DW 64021,64103,64260,64400DW 64524,64580,64684,64777DW 64820,64898,64968,65030DW 65058,65110,65157,65178END8 键盘ORG 0H ;翻转法键盘扫描显示?KB1: MOV P1,#0F0H ;列线输出低电平MOV A,P1 ;输入行线值CJNE A,#0F0H,KB2 ;若有键按下, 转KB2?AJMP KB1 ;若无键按下,转KB1KB2: MOV B,A ;保存键码的高四位ORL A,#0FH ;A高四位不变,低四位置1?MOV P1,A ;键码的高四位通过行线输出?MOV A,P1 ;输入列线值ANL A,#0FH ;屏蔽高四位ORL B,A ;键码的高四位与低四位合并MOV DPTR,#TAB ;DPTR 指向键码表首地址?MOV R3,#0 ;R3?作为键号计数器KB3: MOV A,R3MOVC A,@A+DPTR ;取键码CJNE A,B,NEXT ;所取键码与当前按键的键码不等转移?CALL DELAY ;延时20msCALL DISPLAY ;显示键号WAIT0: MOV P1,#0F0H ;以下3条指令为等待按键释放MOV A,P1CJNE A,#0F0H,W AIT0CALL DELAYAJMP KB1NEXT: INC R3 ;键号计数器加1AJMP KB3DELAY: MOV R0,#32H ;延时20msDELAY0: MOV R1,0C8HDELAY1: DJNZ R1,DELAY1DJNZ R0,DELAY0RET;显示子程序DISPLAY:MOV DPTR,#TAB1 ;DPTR指向段码表首址MOV A,R3MOVC A,@A+DPTR ;查段码表MOV SBUF,A ;输出段码RETTAB: DB 77H,7BH,7DH,7EH,0B7H,0BBH,0BDH,0BEH,0D7H DB 0DBH,0DDH,0DEH,0E7H,0EBH,0EDH,0EEH ;0~F键码tab1: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H;0~9 DB 88H,83H,0C6H,0A1H,86H,8EH ;a~f段码END9 交通灯制作SR EQU P1.0 ;南北红灯SY EQU P1.1 ;南北黄灯SG EQU P1.2 ;南北绿灯ER EQU P1.3 ;东西红灯EY EQU P1.4 ;东西黄灯EG EQU P1.5 ;东西绿灯ORG 00hST1: SETB SG ;南北方向绿灯亮CLR SYCLR SRCLR EGCLR EYSETB ER ;东西方向红灯亮MOV R3, #20 ;长延时CALL DELAYMOV R4, #8 ;南北方向绿灯闪4次ST2: CPL SG ;MOV R3, #2 ;短延时CALL DELAYDJNZ R4, ST2CLR SG ;南北方向绿灯灭SETB SY ;南北方向黄灯亮MOV R3, #20 ;延时CALL DELAYST3: CLR SY ;南北方向黄灯灭SETB SR ;南北方向红灯亮CLR ER ;东西方向红灯灭SETB EG ;东西方向绿灯亮MOV R3, #20 ;长延时CALL DELAYST4: MOV R4, #8 ;东西方向绿灯闪4次LP: CPL EGMOV R3, #2 ;短延时CALL DELAYDJNZ R4, LPCLR EG ;东西方向绿灯灭SETB EY ;东西方向黄灯亮MOV R3, #20 ;延时CALL DELAYSJMP ST1 ;转ST1DELAY: MOV R1, #0 ;延时子程序DELAY1: MOV R0, #0DELAY2: DJNZ R0, DELAY2DJNZ R1, DELAY1DJNZ R3, DELAYRETend10 矩阵键盘0518ORG 00H ;扫描法键盘扫描显示?CLR P3.3CLR P3.4KB1: MOV P2,#0FH ;行线输出低电平MOV A,P2 ;输入列线值CJNE A,#0FH,KB2 ;若有键按下,转KB2行扫??AJMP KB1 ;若无键按下,转KB1KB2: MOV B,#7FHKB22: MOV P2,BMOV A,P2ANL A,#0FHCJNE A,#0FH,KB3 ;此行有键按下, 转KB3MOV A,BRR AMOV B,AAJMP KB22KB3: ANL B,#0F0HORL B,AMOV R3,#0HMOV DPTR,#TABKB4: MOV A,R3MOVC A,@A+DPTR ;取键码CJNE A,B,NEXT ;所取键码与当前按键的键码不等转移?CALL DELAY ;延时20msCALL DISPLAY ;显示键号WAIT: MOV P2,#0F0H ;以下3条指令为等待按键释放MOV A,P2CJNE A,#0F0H,W AITCALL DELAYAJMP KB1NEXT: INC R3 ;键号计数器加1AJMP KB4DELAY: MOV R0,#05H ;延时20msDELAY0: MOV R1,0C8HDELAY1: DJNZ R1,DELAY1DJNZ R0,DELAY0RET;显示子程序DISPLAY:MOV DPTR,#TAB1 ;DPTR指向段码表首址MOV A,R3MOVC A,@A+DPTR ;查段码表SETB p3.3SETB p3.4MOV P1, A ;将段码送出RETTAB: DB 77H,7BH,7DH,7EH,0B7H,0BBH,0BDH,0BEH,0D7H DB 0DBH,0DDH,0DEH,0E7H,0EBH,0EDH,0EEH ;0~F键码tab1: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH;0~9 DB 77H,7CH,39H,5EH,79H,71H ;a~f段码END11 按键控制ORG 0000HSTART: MOV P1, #0FFHMOV P2, #00HMOV A, P1JNB ACC.7, STARTANL A, #3FHCJNE A, #3FH,S1AJMP STARTS1: CALL DELAYMOV A, P1JNB ACC.7, STARTANL A, #3FHCJNE A, #3FH,S2MOV A, #01HMOV P2, ACALL DELAY1AJMP STARTS2: CJNE A, #3DH,S3MOV A, #02HMOV P2,ACALL DELAY1AJMP STARTS3: CJNE A, #3BH,S4MOV A, #04HMOV P2, ACALL DELAY1AJMP STARTS4: CJNE A, #37H,S5MOV A, #08HMOV P2, ACALL DELAY1AJMP STARTS5: CJNE A, #2FH,S6MOV A,#10HMOV P2, ACALL DELAY1AJMP STARTS6: CJNE A, #1FH,S7MOV A, #20HMOV P2, ACALL DELAY1S7: AJMP STARTDELAY: MOV R6,#10H;30H DE0: MOV R7,#1OH;30HDE1: DJNZ R7,DE1DJNZ R6,DE0RETDELAY1: MOV R4,#0FFH DE2: MOV R5,#0FFHDE3: DJNZ R5,DE3DJNZ R4,DE2RETEND。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
main()
{
uchar tt;
P0 = 0xbf;
P27 =0;
//
P1 = 0xff;
while(1)
{
P1=0xf0;
if((P1&0xf0)!=0xf0){
keyscan();
P0=disp_code[key];
for(tt=0;tt<200;tt++)
{ beep();}
数码管显示 "-"
case(0xed):display(4);break; case(0xdd):display(5);break; case(0xbd):display(6);break; case(0x7d):display(7);break; } P1=0xfb; temp=P1; switch(temp) {
}
void main(void)
{
unsigned char temp;
display(16); // 初始显示 "-"
while(1)
{
P1=0xff; // 先向 P1 口写 1;端口读状态
P1=0xf0;
temp=P1;
if(temp!=0xf0)
{
delay1ms(15);
if(temp!=0xf0)
90,0x88,0x83,0xc6,0xa1,0x86,0x8e};
void delay1ms(uint i)
{uchar j;
while(i--)
{for(j=0;j<115;j++)
//1ms 基准延时程序
{;}
}
}
void beep() / / 产生 1KHZ频率声音的函数
{
fmq=0;
delay500us();
{
for(j=0;j<115;j++)
//1ms 基准延时程序
{;}
}
}
void delay500us()
{
unsigned char j;
for(j=0;j<57;j++)
//500us 基准延时程序
{ ;}
}
void beep() // 产生 1KHZ频率声音的函数
{
fmq=0;
delay500us();
fmq=1; delay1ms(200); } } }
中断 #include<reg52.h> #define uint unsigned int #define uchar unsigned char sbit dula=P2^6; sbit wela=P2^7; sbit d1=P1^0; uchar num; uchar code table[]={ 0x3f,0x06,0x5b,0x4f, 0x66,0x6d,0x7d,0x07, 0x7f,0x6f,0x77,0x7c, 0x39,0x5e,0x79,0x71}; void delay(uint z); void main() {
/* 行线接 P1.0 - P1.3 ,列线接 P1.4 -P1.7 。 根据线反转法扫描键盘返回的键值编码查键值编码表, 键值并送数码管显示。 开机时,数码管显示“-” 。 */
从而得到
#include <reg52.h>
#include <intrins.h>
#define uchar unsigned char
for(j=0;j<=15;j++)
{
if(keycode== key_code[j]) //
{
key=j;
return(key);
}
}
}
}
else
P1=0xff; //P1 口写 1 输入状态
判键是否按下 延时 20ms
二次判键是否按下
组合成键编码 查表得键值
return (16);//"-"
}
num=0; aa=0; //TMOD=0X00;// 设定定时器 0 为工作方式 0 TMOD=0X01;//设定定时器 0 为工作方式 1 //TH0=(8192-5000)/32; //TL0=(8192-5000)%32;
TH0=(65536-50000)/256; TL0=(65536-50000)%256; EA=1;// 开总中断 ET0=1;// 开定时器 0 中断 TR0=1;// 启动定时器 0 wela=1; P0=0x24; wela=0; dula=1; P0=0x3f; dula=0; while(1) {
#define uint unsigned int
sbit P27=P2^7;
sbit fmq=P3^6;
uchar key;
unsigned char code disp_code[]={
0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,
0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e,0xbf};
{
uchar scan1,scan2,keycode,j;
P1=0xf0;
scan1=P1;
if((scan1&0xf0)!=0xf0)
//
{
delay1ms(20);
//
scan1=P1;
if((scan1&0xf0)!=0xf0) //
{
P1=0x0f; //
线反转法的核心
scan2=P1;
keycode=scan1|scan2; //
********
函数功能:定时器 T0 的中断服务程序
*******************************************************
*******/
void Time0(void) interrupt 1 using 0 //
code
fmq=1; delay500us(); } void delay500us() { unsigned char j; for(j=0;j<57;j++) {; } } void main() { uchar t; P27=0; while(1){
if(K5==0){ delay1ms(15); if(K5==0){ for(t=0;t<100;t++) { beep();}
TH0=(65536-50000)/256; // 定时器 T0 的高 8 位赋初值
TL0=(65536-50000)%256; // 定时器 T0 的高 8 位赋初值
TR0=1;
//
启动定时器 T0
while(1);// 无限循环等待中断
}
/******************************************************
{
P1=0xfe;
temp=P1; switch(temp) {
case(0xee):display(0);break; case(0xde):display(1);break; case(0xbe):display(2);break; case(0x7e):display(3);break;
} P1=0xfd; temp=P1; switch(temp) {
独立按键
#include<reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit P27=P2^7;
sbit K5=P1^4;
sbit fmq=P3^6;
uchar num;
unsigned
char
s8[16]={0xc0,0xf9,0xa4,0xb0,0x99,0xLeabharlann 2,0x82,0xf8,0x80,0x
// 数据类型的宏定义
sbit P27=P2^7;
unsigned
char
code
table[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0
x90,0x88,0x83,0xC6,0xA1,0x86,0x8E,0xBF};
// 共阳数码管显示字型码数组 1011 1111 "-"
num=num+1; if(num==16){ num=0; }
//500us 基准延时程序
while(!K5);// } } P0=s8[num]; } }
等待按键释放
#include<reg52.h>
#define uchar unsigned char //
数据类型的宏定义
#define uint unsigned int
********
函数功能:主函数
*******************************************************
*******/
void main(void)
{
i=0;
EA=1;
//
开总中断
ET0=1;
//
定时器 T0 中断允许
TMOD=0x01;
//
使用定时器 T0 的模式 1
void delay1ms(uint i)
{
uchar j; while(i--) { for(j=0;j<115;j++)
; //1ms 基准延时程序
}
}
void display(unsigned char i)
{
P27=0; //