刀库换刀流程和逻辑思路图文稿
斗笠式刀库换刀过程的控制

斗笠式刀库换刀过程的控制张 楠,李 强,秦建国(内蒙古工业大学机械学院,内蒙古呼和浩特 010062)摘 要:介绍了南京四开SKY2001系统的NC程序与PLC相配合能方便地控制刀库动作、轴移动和主轴松夹等动作,从而实现斗笠式刀库的换刀过程的完整控制。
关键词:PLC;刀库;换刀过程;轴的控制中图分类号:TG723 文献标识码:B 文章编号:1671-5276(2006)04-0106-02On the Control of C loak s Knives StoreroomZHANG Nan,LI Qiang,Q IN Jian-guo(Inner Mongolia University of Technology,NM Huhehaote010062,China)Abstract:The paper introduces the NC program of Nanjing SKY2001.T he program,cooperated w ith the PLC (programmable logical controller),can easily control the knives storeroom action,axis shift and principal ax is loosening and clamping.T hus realizing the full control of ex chang ing knives.Key words:PLC;knives storeroom;the process of exchanging knives;axis control0 前言加工中心是为了满足产品的批量生产,通过自动更换不同的刀具在一次装夹中完成相应工序的全部加工,因此大大提高了加工效率。
加工中心是通过自动换刀系统实现刀具的自动换取的,根据刀库选取的不同,换刀系统的控制方式也不同。
刀库换刀流程和逻辑思路
刀库换刀流程和逻辑思路LG GROUP system office room 【LGA16H-LGYY-LGUA8Q8-LGA162】刀库换刀流程和逻辑思路·乱刀式刀库的换刀流程图1.斗笠式①取刀②还刀③换刀KM2主KA1与KA2分PMC库PMC接线图。
在此例应用中,传感器信号分别接在、输入端口,而控制正反转接触器KM1、KM2的中间继电器的线圈分别由、控制。
电动刀库PMC接线图图6 刀库旋转逻辑梯形图例如,加工中心在执行M06T1换刀指刀令时的换刀结果是:刀库中的T1刀装放轴。
(1)D SCH功能指令(检索功能)当CNC读到T1指令代码信号时,将此信号信息送入PMC。
当PMC接到寻找新刀具的指令T1后(FT3为“1”)在模拟刀库的刀号数据表中开始T 代码数据检索出来存入F26地址单元中。
然后将1号刀所在数据表中的序号1存入到检索结果输出地址D100中,同时为“1”。
由于为“0”。
即断开,所以DSCH功能指令按规定2位BCD码处理数据。
(2)C OIN功能指令(比较指令)当为“1”时,地址D100的内容(指令1号)和地址D200(当前刀套数据表序号4)的内容作比较。
数据一致时,输出为“1”,不一致时,为“0”作为刀库旋转达ROT功能指令的条件。
(3)R OT功能指令(旋转指令)ROT功能指令中,旋转检索数(刀套位置个数)为12,现在位置地址为D200(存放当前刀套号4),目标位置地址为D100(存放T1号刀具的刀套号1),计算结果输出地址为C1。
当刀具判别指令为“0”,ROT指令开始执行根据ROT控制条件设定,计算出刀库现在的位置与目标相差的步数为“3”步将此数据存入C1中,并选择出最短旋转路径,使置“0”,正向旋转方向输出。
通过正向旋转继电器,驱动刀库正向旋转“3”步,即找到了1号刀位。
(4)CTR功能指令(计数指令)CTR功能指令中,计数指令01号计数,地址C1为刀库现在的位置目标位置相差的步数的数据存储地址。
加工中心斗笠式刀库

精选可编辑ppt
5
• 斗笠式刀库的分度装置是利用了外啮合槽轮机构能把主动轴的匀速连续运动 转换为从动轴的周期性间歇运动原理设计的一种分度转位机构。斗笠式刀库 选刀时,首先由刀库回转电机得到旋转指令,输入轴通过联轴器带动定位法 兰旋转,从而使在定位法兰上的圆柱滚子回绕法兰中心转动;当圆柱滚子转 动一定角度,进入分度盘的分度槽中,拨动分度盘开始作转位运动;当分度 盘转过一定的角度后,圆柱滚子从分度槽中脱出,刀库鼓轮盘(分度盘通过 螺钉与刀库鼓轮连在一起转动见图1)即静止不动,并由定位法兰的锁止半轴 定位。
∵ k≤1 得:n≤2z/ (z -2)
槽数z
3
4
5 、6
≥7
圆销数n
1~6
1~4
1~3
1~2
运动系数k
1/6~1
0精.2选5~可1编辑ppt 0.3~1
0.36~1
11
当z=4及n=2时 k=n(1/2-1/z) = 0.5
2、运动特性
说明此时槽轮的运动时间和静止时间相等。
(1)外啮合槽轮机构
图示槽轮在运动的任一瞬时,设拨盘位置角用α来表示,槽轮位置角 用φ表示。并规定和在圆销进入区为正,在圆销离开区为负,变化区间为:
• 1.2
• 数控系统对指令的目标刀具号和当前主轴的刀具号进行分析。如果目 标刀具号和当前主轴刀具号一致,直接发出换刀完成信号。如果目标 刀具号和当前主轴刀具号不一致,
• 启动换刀程序,进入下一步。
• 1.3
• 主轴沿Z方向移动到安全位置。一般安全位置定义为Z轴第一参考点位 置,同时主轴完成定位动作,并保持定位状态;主轴定位常常通过检 测主轴所带的位置编码器一转信号来完成。
锁止弧半径r0
刀库的动作顺序说明
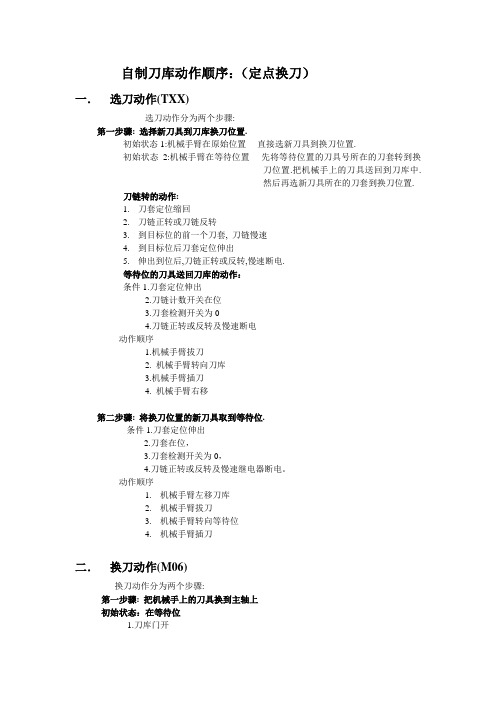
自制刀库动作顺序:(定点换刀)一.选刀动作(TXX)选刀动作分为两个步骤:第一步骤: 选择新刀具到刀库换刀位置.初始状态1:机械手臂在原始位置----直接选新刀具到换刀位置.初始状态2:机械手臂在等待位置----先将等待位置的刀具号所在的刀套转到换刀位置.把机械手上的刀具送回到刀库中.然后再选新刀具所在的刀套到换刀位置.刀链转的动作:1.刀套定位缩回2.刀链正转或刀链反转3.到目标位的前一个刀套, 刀链慢速4.到目标位后刀套定位伸出5.伸出到位后,刀链正转或反转,慢速断电.等待位的刀具送回刀库的动作:条件1.刀套定位伸出2.刀链计数开关在位3.刀套检测开关为04.刀链正转或反转及慢速断电动作顺序1.机械手臂拔刀2. 机械手臂转向刀库3.机械手臂插刀4. 机械手臂右移第二步骤: 将换刀位置的新刀具取到等待位.条件1.刀套定位伸出2.刀套在位,3.刀套检测开关为0,4.刀链正转或反转及慢速继电器断电。
动作顺序1.机械手臂左移刀库2.机械手臂拔刀3.机械手臂转向等待位4.机械手臂插刀二.换刀动作(M06)换刀动作分为两个步骤:第一步骤: 把机械手上的刀具换到主轴上初始状态:在等待位1.刀库门开2.坐标回换刀位置(和1步同时进行)3.主轴定向4. 机械手臂转向主轴5.机械手臂右移6.主轴松刀7.机械手臂拔刀8..机械手臂180度或0度旋转9..机械手臂插刀10.主轴夹刀11机械手臂左移12机械手臂转向等待位13刀库门关(关门后即可以进行加工)第二步骤: 将等待位的刀具送回刀库1.机械手臂拔刀2.机械手臂左移3.机械手臂插刀4.机械手臂右移(整个换刀动作结束)注意:如果选择的刀具在主轴上,则继续执行下面的程序。
交换站动作顺序M60(任意交换) M601(指定1号台) M602(指定2号台) 动作顺序:1.B轴回零.2.X轴回到换台位置.3.换台门开4.1号台(或2号台)快出5.台板松开(浮起)6.1号台(或2号台)慢回7.180度或0度旋转8.2号台(或1号台)慢出9.台板夹紧10.2号台(或1号台)快回11.换台门关。
加工中心刀库装刀步骤【技巧】
数控加工中心有一刀库,我们如果需要哪把刀就用这个指令把它调出来。
当然还有另一种情况就是手动换刀,这个比较容易,你可以参看各厂家的说明书,了解下松刀和紧刀按钮就可以了,那么加工中心刀库装刀有哪些步骤呢?一、刀库装刀的步骤及注意事项一般来说,对于一个工件完整的加工工序,可能涉及铣削、钻削、镗削、铰削和攻丝等工序。
所使用的加工刀具可能几把到几十把。
工件数控加工前需要把每一把刀具装刀刀库中并和加工程序设定对应关系,以便由程序调用。
1、装刀步骤首先将使用的刀具安装到刀柄上,并调整刀具长度至所要求的尺寸;然后根据工件的工艺要求和程序设计将刀具和刀具号一一对应,为了避免混要可以贴上标签;将立式加工中心的主轴回Z轴零点,并通过数控系统面板手动输入并执行T01 M06指令;此时手动将1号刀具装入刀库中,这个刀具即为1号刀具;然后在手动输入T02 M06指令,并手动将第二把刀具装入刀库中,这个刀具即为第二把刀。
按照上述操作一次将剩余刀具装入刀库即可。
加工中心哪家好。
2、装刀注意事项在立式加工中心进行刀库装刀时,应特别注意以下几点:一是只有主轴回到机床零点或换刀点,才能将主轴上的刀具装入刀库,或者将刀库中的刀具调整在主轴上。
二是装入刀库的刀具必须与加工程序中的刀具号一一对应,否则会严重损伤机床和加工零件。
三是交换刀具时,主轴上的刀具不能与刀库中的刀具号重号。
二、刀库装刀后的设置刀库完成装刀后需要进行必要的设置才可进行立式加工中心的正式加工。
因每把刀具的长度或到Z坐标零点的距离都不相同,这些距离的差值需要进行刀具的长度补偿值设定才行。
另外铣刀都就有一定的半径,刀具中心轨迹和工件轮廓差一个半径的尺寸。
因此需要将刀具半径进行补偿才可正常进行数控加工。
加工中心哪家好。
刀具长度补偿有两种方法:一种是将其中的一把刀具作为标准刀具,找出其他刀具与标准刀具的差值,作为其它刀具长度补偿值;另一种是将工件坐标系的Z值输为0,调出刀库中的每把刀具,通过Z向设定器确定每把刀具到工件坐标系Z 向零点的距离,直接将每把刀具到工件零点的距离值输到对应的长度补偿值代码中。
刀库换刀流程和逻辑思路

刀库换刀流程和逻辑思路·乱刀式刀库的换刀流程图固定式刀库的换刀流程图固定式刀库换刀过程分解:固定式刀库换刀动作可分为三个,即取刀、还刀和换刀。
由于采用固定刀位管理方式,刀具的交换实际上是还刀和取刀这两个动作。
(斗笠式刀库控制约定:1.斗笠式刀库采用固定刀位,即刀套号就是刀具号;2.取刀时,刀库就近找刀)① 取刀现状:主轴上无刀具 编程:M06 T* 刀库动作描述:主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置主轴准停Z=-10.主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10. 主轴准停主轴换刀位置主轴换刀准备位置 刀库原始位置刀库换刀位置Z=-10.主轴准停主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10.主轴准停主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10.主轴准停② 还刀现状:主轴上有刀具 编程:M06 T0 刀库动作描述:主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10.主轴准停主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10.主轴准停主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10.主轴准停主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10.主轴准停③ 换刀现状:主轴上有刀具 编程:M06 T*刀库动作描述: 刀具交换的过程,就是还刀加上取刀的过程。
固定式刀库自动换刀装置电气控制电气控制电路包括接强电电路和PMC控制电路两部分。
下图所示为接触器控制电路。
主电路由空气开关QF、KM1主触点、KM2主触点、三相异步交流电机M等组成。
控制电路中中间继电器KA1与KA2分别控制接触器KM1和KM2的线圈,控制刀库电机M 的正反转和停机制动。
实现刀具的选择从而达到精确选刀的目的。
电动刀库电气控制线路图四、固定式刀库自动换刀装置的PMC控制PMC控制包括硬件控制和软件控制两方面。
新代系统斗笠式刀库换刀规划

2019/3/18
斗笠式刀库换刀动作故障及排除方法
根据以上的分析,可以总结换刀故障的处理思路
T1 刀 盘
打刀缸
Z+
抬刀点 Pr3409
主
T2
轴
换刀点 Pr2803
主轴刀号: 1
2019/3/18
1 1
0 1
0 2
2 2
6
刀盘刀号: 2
斗笠式刀库换刀动作异常中断 斗笠式刀库换刀流程小结
1.换刀流程由十二个动作组成 2.每个动作按照固定的顺序依次执行 3.每个动作相互制约和限制
4.每个动作的执行都必须满足相关的约束条件
主轴定位解除m05中断斗笠式刀库换刀动作异常中断进入jog模式按键退回刀库进入刀表编辑画面根据实际主轴刀号修改刀表上的数据如果主轴无刀可设定主轴刀号为0进入jog模式按键退回刀库进入刀表编辑画面根据实际主轴刀号修改刀表上的数据如果主轴无刀可设定主轴刀号为0进入jog模式按键退回刀库进入刀表编辑画面根据实际主轴刀号修改刀表上的数据如果主轴无刀可设定主轴刀号为0202011手动初始化刀库系统斗笠式刀库换刀动作异常中断的处理进入手动模式jog退回刀盘按键aux7或者复位按键取下主轴上的刀具如果无法松刀则修改刀表中的主轴刀号为1取下刀盘一号刀爪上的刀具参数3407手动调整刀库0
5
刀盘刀号: 2
一.主轴停止(M05) 二.刀盘旋转至主轴目前刀号 三.主轴定位(M19)
换刀程序范例(上海培训)

T功能选通关断
目标位置发
R0690.7 D
刀库在准备位置上
R0008.2
新选刀具与主轴刀具相同
R0725.2 E
N00003 F 16
R0600.0
ACT SUB 8 MOVE 1111
逻辑 1
G 1111
自动时将预选道具号码转移到 保持型寄存器(中间继电器) K0中。断电后不丢失,便于调 试诊断。
N00015 D 99 R0001.2 R0672.4 K0010.1 R0754.7 R0695.2 R0695.1
液压OK 机械手初始完成 一次执行标志 脉冲切断
N00016 E 105 R0001.2 R0672.4 K0010.1 R0754.7 R0695.2
刀库初始 化过程 返回1#刀 套位置的 启动脉冲
R0013.6
产生计数开 关的单脉冲
刀库左转
N00008 G 46 Y0002.3 ACT SUB 3 TMR 0032 R0013.4
起动屏蔽
刀库右转
Y0002.4 H
考虑如果刀库位置已经在开关 临界状态,刀库找刀时会读错 脉冲,所以增加一个手动时的 屏蔽脉冲,以防误动作。
逻辑 1 从1开始计数
N00009 I 51 R0600.0 CNO SUB 5 CTR 0011 R0690.2
+/-计数脉冲
Y0002.4 J Y0002.3 UPDOWN
环形计 数器 11#
逻辑 0 不复位
R0600.1 K RST
到库左转
Y0002.3 L
计数脉冲
R0013.5
起动屏蔽
ACT
R0013.4
刀库右转
Y0002.4 M
13. FANUC圆盘刀库——PMC换刀详解.

加工中心机床圆盘式刀库发那科系统PMC的编程技术安庆长谷川数控机床有限公司 雷晓鹏北京发那科机电有限公司 胡 年自动换刀机构(ATC)是数控机床易发生故障的地方。
本文介绍PMC的编程思路和方法,供大家讨论。
此程序自2004年始已在数百台加工中心运用。
一、基本规则1、刀具在D0000到D0032登录。
D0000登录主轴刀具号,D0001到D0032登录刀套内刀具号,在此假定刀库容量为32把刀。
2、执行T码时,刀库中T码刀具旋转到换刀口位置,在刀库旋转过程中,程序自动加工运行不中断,称之为预选刀。
3、M6执行换刀过程,执行前,Z轴必须回第一参考点,即 G91 G28 Z0或 M19 G91 G28 Z0。
4、允许的大径刀(如面铣刀)直径不容许超过普通刀具(以下简称:小径刀)最大直径的二倍,否则大径刀之间随机交换会撞刀。
刀具重量不能超过刀库容许重量。
大径刀刀具号设定规则:大径刀的相临两侧刀套内必须为空,空刀套的刀具号自动设定为99(也可设定其他数字,PMC识别为空刀)。
D100内设定大径刀个数,小径刀刀具号必须大于大径刀个数乘2加1。
初始设定主轴刀具号D0000必须是小径刀刀具号。
5、大径刀具交换规则:小径刀可放进大径刀刀套内,大径刀不可放进小径刀刀套内。
主轴小径刀与刀库小径刀交换,一次性换刀;主轴大径刀与刀库大径刀交换,一次性换刀;主轴小径刀与刀库大径刀交换,一次性换刀,小径刀放进大径刀刀杯套内;主轴大径刀与刀库小径刀交换, 第一次将原大径刀刀套内的小径刀换到主轴上,第二次再进行小径刀之间的交换。
以上交换规则PMC自动识别换刀。
6、在刀库运行中发生停电等故障,具备中断点记忆和用按键操作恢复功能。
有完善的电机保护和报警操作提示。
7、以上自动刀具交换(ATC)动作本文介绍的都用PMC完成,读者也可用宏程序和PMC结合编程实现。
二、PMC程序框图三、详细介绍刀库盘旋转部分PMC程序和说明1、准备工作自动换刀部分反馈信号:R30.0=1 主轴抓刀反馈;R30.1=1 主轴松刀反馈,延迟0.2秒是消除信号反馈传感器安装误差,其它信号反馈延迟道理相同;R30.2=1 刀杯上(水平位置)信号反馈;R30.3=1 刀杯下(刀具垂直向下位置)信号反馈。
加工中心斗笠式刀库

槽轮机构(马尔它机构)
一、槽轮机构的组成及其工作特点 组成:带圆销的拨盘、带有径向槽的槽轮。 拨盘和槽轮上都有锁止弧:槽轮上的凹圆弧、拨盘 上的凸圆弧,起锁定作用。
拨盘 圆销
ω1
锁止弧
o1
工作过程:拨盘连续回转,当两锁止弧接触时, 槽轮静止;反之槽轮运动。
作用:将连续回转变换为间歇转动。
o2
槽轮
ω2
• •
• • • • • • • • •
1.4 刀库平行向主轴位置移动。刀库刀具中心和主轴中心线在一条直线上时为换 刀位置,位置到达通过信号传感器(B)反馈信号到数控系统PLC进行确认。 1.5 主轴向下移动到刀具交换位置。一般刀具交换位置定义为Z轴的第二参考点, 在此位置将当前主轴上的刀具还回到刀库中。 1.6 刀库抓刀确认后,主轴吹气松刀。机床在主轴部分安装松刀确认传感器 (C),数控机床PLC接收到传感器C发送的反馈信号后,确认本步动作执行 完成,允许下一步动作 开始。 1.7 主轴抬起到Z轴第一参考点位置。此操作目的是防止刀库转动时,刀库和主 轴发生干涉。 1.8 刀库旋转使能。数控系统发出刀库电机正/反转启动信号,启动刀库电机的转 动,找到指令要求更换的目标刀具,并使此刀具位置的中心与主轴中心在一 条直线上。
∴ 槽轮的槽数 z≥3
可知:当只有一个圆销时,k=1/2-1/z < 0.5 即槽轮的运动时间总是小于其静止时间。 如果想得到k≥0.5的槽轮机构,则可在拨盘上多装几个圆销,设装有n个均匀 分布的圆销,则拨盘转一圈,槽轮被拨动n次。故运动系数是单圆柱销的n倍, 即:
k=n(1/2-1/z) ∵ k≤1 得:n≤2z/ (z -2)
• •
(3) 刀架定位刀架体7转动时带动着电刷座10转动,当转到程序指定的刀号时,粗 定位销15在弹簧力的作用下进入粗位盘6的槽中进行粗定位,同时电刷13接 触导体使电动机1翻转。由于粗定位槽的限制,刀架体7不能转动,使其在该 位置垂直落下,刀架体7和刀架底座5上的端面齿啮合实现精确定位。
斗笠刀库解析

斗笠式刀库的动作过程斗笠式刀库在换刀时整个刀库向主轴平行移动。
(1)还刀取下主轴上原有刀具,当主轴上的刀具进入刀库的卡槽时,主轴向上移动脱离刀具。
(2)抓刀刀库转动,当目标刀具位于主轴正下方时,主轴下移,使刀具进入主轴锥孔内,刀具夹紧后,刀库退回原来的位置,换刀结束。
斗笠式刀库换刀过程动作图PMC和NC程序的配合PMC在整个换刀过程中主要控制刀库的正反转、刀库的前进后退、松刀紧刀阀动作。
NC程序控制主轴的上升和下降、主轴定位。
N19 M99:9001 (参数6071)N1 IF[#1000EQ1]GOTO19 (T CODE=SP TOOL) T代码等于主轴刀号,结束N2 #199=#4003 ( G90/G91 MODLE)N3 #198=#4006 (G20/21 MDOLE) 保留之前的模态信息N4 IF[#1002EQ1]GOTO7 ( SP TOOL=0) 主轴无刀,直接抓刀N5 G21G91G30P2Z0M19 回第2参考点,M19定向,准备还刀N6 GOTO8N7 G21G91G28Z0M19 回第1参考点,M19定向,准备抓刀N8 M50 刀库准备好(使能)N9 M52 刀库靠近主轴N10 M53 松刀吹气N11 G91G28Z0 回第一参考点N12 IF[#1001EQ1]GOTO15 (T CODE=0) 如果指令T0,则无需抓刀N13 M54 刀盘旋转G04X3.0N14 G91G30P2Z0 回第二参考点N15 M55 刀具卡紧N16 M56 刀盘远离主轴N17 M51 旋转结束N18 G#199G#198 恢复模态M代码含义M50刀库旋转使能M51刀库旋转结束M52刀库向右(靠近主轴)M53松刀,吹气M54刀盘旋转M55刀具夹紧M56刀盘向左(远离主轴)宏变量定义宏程序中,利用#1000-#2000宏变量对应PMC信号G54的相应位,可直接和PMC 进行联系,极大的方便了处理。
FANUC刀库换刀——详解.
加工中心机床圆盘式刀库发那科系统PMC的编程技术安庆长谷川数控机床有限公司 雷晓鹏北京发那科机电有限公司 胡 年自动换刀机构(ATC)是数控机床易发生故障的地方。
本文介绍PMC的编程思路和方法,供大家讨论。
此程序自2004年始已在数百台加工中心运用。
一、基本规则1、刀具在D0000到D0032登录。
D0000登录主轴刀具号,D0001到D0032登录刀套内刀具号,在此假定刀库容量为32把刀。
2、执行T码时,刀库中T码刀具旋转到换刀口位置,在刀库旋转过程中,程序自动加工运行不中断,称之为预选刀。
3、M6执行换刀过程,执行前,Z轴必须回第一参考点,即 G91 G28 Z0或 M19 G91 G28 Z0。
4、允许的大径刀(如面铣刀)直径不容许超过普通刀具(以下简称:小径刀)最大直径的二倍,否则大径刀之间随机交换会撞刀。
刀具重量不能超过刀库容许重量。
大径刀刀具号设定规则:大径刀的相临两侧刀套内必须为空,空刀套的刀具号自动设定为99(也可设定其他数字,PMC识别为空刀)。
D100内设定大径刀个数,小径刀刀具号必须大于大径刀个数乘2加1。
初始设定主轴刀具号D0000必须是小径刀刀具号。
5、大径刀具交换规则:小径刀可放进大径刀刀套内,大径刀不可放进小径刀刀套内。
主轴小径刀与刀库小径刀交换,一次性换刀;主轴大径刀与刀库大径刀交换,一次性换刀;主轴小径刀与刀库大径刀交换,一次性换刀,小径刀放进大径刀刀杯套内;主轴大径刀与刀库小径刀交换, 第一次将原大径刀刀套内的小径刀换到主轴上,第二次再进行小径刀之间的交换。
以上交换规则PMC自动识别换刀。
6、在刀库运行中发生停电等故障,具备中断点记忆和用按键操作恢复功能。
有完善的电机保护和报警操作提示。
7、以上自动刀具交换(ATC)动作本文介绍的都用PMC完成,读者也可用宏程序和PMC结合编程实现。
二、PMC程序框图三、详细介绍刀库盘旋转部分PMC程序和说明1、准备工作自动换刀部分反馈信号:R30.0=1 主轴抓刀反馈;R30.1=1 主轴松刀反馈,延迟0.2秒是消除信号反馈传感器安装误差,其它信号反馈延迟道理相同;R30.2=1 刀杯上(水平位置)信号反馈;R30.3=1 刀杯下(刀具垂直向下位置)信号反馈。
加工中心换刀程序分析

第十章、加工中心换刀程序分析10.1 加工中心的换刀程序分析10.1.1机床及换刀机构机床外观主轴和机械手刀套落下动作换刀过程中10.1.2 换刀动作分析这种类型的加工中心的整个换刀过程包括刀库找刀和换刀两个独立的动作。
刀库找刀也叫刀具调用,当机床的操作者通过程序命令,例如:T12,从刀库调用12号刀时,PMC检索12号刀具所在的刀套号,再进行刀库正反转判别,控制刀库旋转;当然还有手动刀库的旋转操作,完成手动装卸刀具。
换刀动作集合了刀库、机械手、主轴三方面的动作,整个过程是一个顺序动作的过程,本章以一台立式加工中心的换刀程序为例,分析换刀程序的程序结构、程序内容,加工中心的生产厂家为台湾丽伟计算机机械股份有限公司,VB系列机床,采用的是FANUC-0IMB系统。
该机床的换刀机构包括:刀库、机械手、主轴拉刀机构。
刀库采用侧装式,安装在立柱上,由三相异步电机通过减速机构带动刀库旋转,通过接近开关检测刀库计数和刀库回零。
换刀时位于刀库最下位置的刀套在刀套抬起/落下油缸的驱动下可完成抬起落下动作。
机械手的旋转、抬起落下等动作是在机械手电机的驱动下,通过一套凸轮机构来完成,换刀动作平滑、快速。
由接近开关检测机械手的关键位置,配合换刀时的其它机构的动作。
主轴拉刀机构完成主轴刀具的夹紧和松开操作,并有接近开关检测主轴刀具的夹紧或松开状态。
通过顺序动作的步骤一步步完成换刀。
以程序控制自动换刀来解释整个换刀过程10.1.3换刀电路:10.1.4换刀程序地址说明:加工中心的换刀程序比较复杂庞大,所涉及的地址较多,为便于阅读梯形图程序,将所涉及的地址放在附录。
10.1.5 换刀程序介绍该机床的PLC类型为SB7,下图是该程序的清单,与换刀有关的程序内容出现在一级程序、二级程序,没有为换刀专门编写子程序。
因为,换刀过程中机械手动作较快,机械手的60度、中间点、180度的检测信号出现的时间很短,所以将这部分的程序放在一级程序,保证8ms能处理到这种信号。
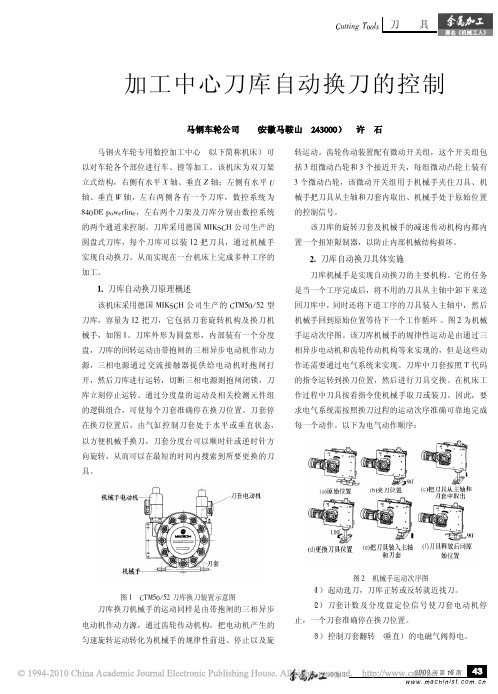
加工中心刀库自动换刀的控制
#" 镗刀杆! $" 镗刀! (" 上下调整螺钉 ’" 两侧调整螺钉
图! #
此刀具的特点:可用于组合机床或其他机械加工机 床,结构紧凑,制造简单,使用灵活。效率高,且在刀 具磨损后可调整继续使用,有效延长刀具寿命,减小机 床夹具调整时间。
( 收稿日期:$&&5&$#5 )
############################################
冷加工
! " " # 年 第 $% 期 # !" ! ! !" " # $ % & ’ & ( )" $ * "" $ ’
刀! ! 具
!"##$%& ’(()*
( # ) 刀套垂直到位,发出到位信号,主轴定向给出 位置到达确认信号。 ( $ ) 机械手从原始位置起动,旋转 %&’ 到达机械手 夹刀位置。 ( ( ) 机械手抠刀到位发出停止信号,把刀具从主轴 和刀套中取出,机械手电动机停止。 ( ) ) 抠刀确认及刀具松开给出到位信号。 ( * ) 刀具夹放松完毕,起动机械手旋转 +*&’ ,到达 刀具更换位置。 ( % ) 机械手电动机停止信号使机械手电动机停止。 ( +& ) 装刀确认及刀具夹紧给出到位信号。 ( ++ ) 机械手电动机起动,使机械手回到原始位置。 ( +, ) 机械手电动机停止信号,使机械手电动机停 止。 ( +- ) 机械手原始位置开关发信号。 ( +# ) 控制刀套翻转 ( 水平) 的电磁气阀得电。 +$ ) 刀套翻 转 处 于 水 平 位 置 的 接 近 开 关 发 信 号 ( ( 刀库换刀动作完成) 。 刀库及机械手的动作可以由 ./ 来控制,也可以由 01/ 来控制,由于该刀库选用的普通的 三 相 异 步 电 动 机,故采用 01/ 来控制刀库及机械手的动作。由于该机 床数 控 系 统 为 *#&23 456789:;7, 它 内 部 集 成 了 <) — -+$ —,20 的 01/ 系统,为 01/ 编程控制刀库和机械手 的动作提供了方便。01/ 程序设计采用了模块化、参数 化和标准化的编程方法,按控制功能将程序块分成不同 的功能块,利用程序块形式的参数编程特点,将控制功 能程序标准化。程序结构如图 - 所示。
加工中心换刀详细说明

加工中心换刀说明
第四步(5):换刀臂旋 转180度换刀后主轴夹紧 刀具 一般情况此动作不会有什 么故障
刀具需要检测主轴夹紧信 号 如果主轴夹紧信号没有, 将停在此位置 故障时先问清楚是否已换 刀,因为在换刀时有两个 90度位置
注意:各换刀信号是否一直有(如刀套主轴 侧到位信号,ATC门开信号)
加工中心换刀说明
第四步(5):换刀臂在 90度位置旋转0度位置 一般情况此动作不会有什 么故障
注意:各换刀信号是否一直有(如刀套主轴 侧到位信号,ATC门开信号)
加工中心换刀说明
第五步:ATC门关闭
一般情况此动作不会有什 么故障 系统需要检测ATC门关闭 信号 如没有此信号,X,Y轴将 不能移动,一直等待此信 号,
Hale Waihona Puke 一加工中心换刀说明
第四步(1):换刀臂旋 转 接下来就是换刀臂旋 转。 如果换刀臂不旋转有以下 原因 1、ATC门到位信号没有, 系统以为ATC门还在关闭 状态。 2、刀套到位信号没有。 3、大隈机床换刀主轴必 须有刀 如图一是刀套到位信号位 置
一
加工中心换刀说明
第四步(2):换刀臂旋 转90度 换刀臂先旋转90度抓刀。 抓住刀后,主轴松刀 如果换刀臂停在抓刀位置 不旋转有以下原因 1、没有主轴松刀到位信 号(又有以下原因:1.主 轴松刀传感器失效,2.液 压阀没有动作,松刀靠液 压松的)
如图一是刀套到位信号位 置
加工中心换刀说明
第四步(3):换刀臂在 90度位置向前伸出 换刀臂在90度抓刀后执行 10-3这个动作。 一般情况此动作不会有什 么故障
注意:各换刀信号是否一 直有(如刀套主轴侧到位 信号,ATC门开信号)
加工中心换刀说明
第四步(4):换刀臂在 90度位置向前伸出后换刀 臂旋转180度换刀 如图执行10-4这个动作。 一般情况此动作不会有什 么故障 注意:各换刀信号是否一 直有(如刀套主轴侧到位 信号,ATC门开信号)
自动换刀装调的装调与维修

从变频器使用说明书上知:该变频器的输出频率有三种
设定方式,即01、02、03三种.对X1、X2输入端而言,01方
式为X1 ON X2 OFF;02方式为X1 OFF X2 ON 03方式X1 ON X2 ON。
检查01方式下,其设定值为0102,故在机械手动作时输
出频率只有2HZ,液晶显示屏上也显示为02。 故障原因:操作者误将变频器设定值修改,致使输出频
一定要将其恢复原值,否则会造成严重事故。
(l)机械手刀库在进行正常换刀时,请不要按面板上的 (2)如果换刀过程中突然停电,机械手卡在刀柄上。 1)主轴松刀 2)将机械手电机的煞车释放点打开。
数控机床电气系统装调与维修一体化教程
3)用扳手转动电机顶部轴端,使机械手回到原位(ATC指示灯变亮),
注意观察机械手的运动方向,如果扳不动,请反向扳动。
(1)刀套下转90°
(2)机械手转75°
(3)刀具松开 (4)机械手拔刀
(5)交换两刀具位置
(6)机械手插刀 (7)刀具夹紧
(8)液压缸复位
(10)刀套上转90° (9)机械手逆转75°
二、刀库校准
1.斗笠式刀库 在MDI方式下输入M20指令并执行即可。
2.机械手式刀库
在MDI方式下输入M40指令并执行即可。
(5)斗笠式刀库, 用手轮将Z轴升至最高处,在MDI
方式下执行M22指令。将刀库退回远离主轴侧并取下无拉钉
的刀柄。 机械手式刀库:用扳手转动电机顶部轴端,使机械手
回到原位(ATC灯亮),并将机械手电机的煞车释放点关闭。
(6)将K01.0改回“0”。 警告:K01.0为刀库保护功能有效,参数修改完成后,
斗笠式刀库换刀动作过程
l-刀库原点检知开关
斗笠刀库解析

斗笠式刀库的动作过程斗笠式刀库在换刀时整个刀库向主轴平行移动。
(1)还刀取下主轴上原有刀具,当主轴上的刀具进入刀库的卡槽时,主轴向上移动脱离刀具。
(2)抓刀刀库转动,当目标刀具位于主轴正下方时,主轴下移,使刀具进入主轴锥孔内,刀具夹紧后,刀库退回原来的位置,换刀结束。
斗笠式刀库换刀过程动作图PMC和NC程序的配合PMC在整个换刀过程中主要控制刀库的正反转、刀库的前进后退、松刀紧刀阀动作。
NC程序控制主轴的上升和下降、主轴定位。
N19 M99:9001 (参数6071)N1 IF[#1000EQ1]GOTO19 (T CODE=SP TOOL) T代码等于主轴刀号,结束N2 #199=#4003 ( G90/G91 MODLE)N3 #198=#4006 (G20/21 MDOLE) 保留之前的模态信息N4 IF[#1002EQ1]GOTO7 ( SP TOOL=0) 主轴无刀,直接抓刀N5 G21G91G30P2Z0M19 回第2参考点,M19定向,准备还刀N6 GOTO8N7 G21G91G28Z0M19 回第1参考点,M19定向,准备抓刀N8 M50 刀库准备好(使能)N9 M52 刀库靠近主轴N10 M53 松刀吹气N11 G91G28Z0 回第一参考点N12 IF[#1001EQ1]GOTO15 (T CODE=0) 如果指令T0,则无需抓刀N13 M54 刀盘旋转G04X3.0N14 G91G30P2Z0 回第二参考点N15 M55 刀具卡紧N16 M56 刀盘远离主轴N17 M51 旋转结束N18 G#199G#198 恢复模态N19M99M代码含义M50刀库旋转使能M51刀库旋转结束M52刀库向右(靠近主轴)M53松刀,吹气M54刀盘旋转M55刀具夹紧M56刀盘向左(远离主轴)宏变量定义宏程序中,利用#1000-#2000宏变量对应PMC信号G54的相应位,可直接和PMC 进行联系,极大的方便了处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
刀库换刀流程和逻辑思
路
文件管理序列号:[K8UY-K9IO69-O6M243-OL889-F88688]
刀库换刀流程和逻辑思路
·
乱刀式刀库的换刀流程图
定:1
找刀)
①取刀
②还刀
③换刀
KM2主触点、三相异步交流电机M等组成。
控制电路中中间继电器KA1与KA2分别控制接触器KM1
和KM2的线圈,控制刀库电机M的正反转和停机制动。
实现刀具的选择从而达到精确选刀的目的。
电动刀库电气控制线路图
四、固定式刀库自动换刀装置的PMC控制
PMC控制包括硬件控制和软件控制两方面。
硬件控制包括输入信号的接入和输出信号的控制。
下图所示为电动刀库PMC 接线图。
在此例应用中,传感器信号分别接在X2.0、X2.1输入端口,而控制正反转接触器KM1、KM2的中间继电器的线圈分别由Y50.1、Y50.2控制。
电动刀库PMC接线图
图6 刀库旋转逻辑梯形图
例如,加工中心在执行M06T1换刀指刀令时的换刀结果是:刀库中的T1刀装放轴。
(1)D SCH功能指令(检索功能)
当CNC读到T1指令代码信号时,将此信号信息送入PMC。
当PMC接到寻找新刀具的指令T1后(FT3为“1”)在模拟刀库的刀号数据表中开始T代码数据检索出来存入F26地址单元中。
然后将1号刀所在数据表中的序号1存入到检索结果输出地址D100中,同时R10.2为“1”。
由于R9091.0为“0”。
即断开,所以DSCH功能指令按规定2位BCD码处理数据。
(2)C OIN功能指令(比较指令)
当R10.2为“1”时,地址D100的内容(指令1号)和地址D200(当前刀套数据表序号4)的内容作比较。
数据一致时,输出R10.3为“1”,不一致时,
R10.3为“0”作为刀库旋转达ROT功能指令的条件。
(3)R OT功能指令(旋转指令)
ROT功能指令中,旋转检索数(刀套位置个数)为12,现在位置地址为D200(存放当前刀套号4),目标位置地址为D100(存放T1号刀具的刀套号1),计算结果输出地址为C1。
当刀具判别指令R10.3为“0”,ROT指令开始执行根据ROT控制条件设定,计算出刀库现在的位置与目标相差的步数为“3”步将此数据存入C1中,并选择出最短旋转路径,使R10.4置“0”,正向旋转方向输出。
通过Y50.1正向旋转继电器,驱动刀库正向旋转“3”步,即找到了1号刀位。
(4)CTR功能指令(计数指令)
CTR功能指令中,计数指令01号计数,地址C1为刀库现在的位置目标位置相差的步数的数据存储地址。
R10.4控制计数器的加计数或计数器的减计数,X2.1为0时计数器不计数,当X2.1为1时计数器计数累加。
当计数器累加到定值
R10.5输出。
刀库旋转后,R10.3输出为“1”时(刀库的实际位置与刀库目标位置一致),即识虽了所要寻找的新刀具,刀库停转并定位,等待换刀。