四工位专用机床课程设计说明书(超详细)
四机位专用机床课程设计

四机位专用机床课程设计一、课程目标知识目标:1. 让学生掌握四机位专用机床的基本结构、工作原理及功能特点,与课本知识紧密结合。
2. 使学生了解四机位专用机床在制造业中的应用场景和重要性,提高对机床行业的认识。
3. 引导学生掌握四机位专用机床的编程与操作方法,培养实际操作能力。
技能目标:1. 培养学生运用所学知识分析、解决四机位专用机床在实际生产中遇到的问题的能力。
2. 提高学生的团队协作和沟通能力,学会在小组讨论中分享观点、倾听他人意见。
3. 培养学生动手实践和创新能力,能够针对四机位专用机床进行简单的故障排查和维护。
情感态度价值观目标:1. 培养学生对机械制造领域的兴趣,激发学习热情,提高学习积极性。
2. 引导学生树立正确的职业观念,认识到机械制造行业的重要性,培养敬业精神。
3. 培养学生的安全意识,加强对四机位专用机床操作过程中安全防护的认识。
课程性质:本课程为专业技能课,结合课本知识,注重实践操作,提高学生的专业素养。
学生特点:学生处于专业技能学习阶段,对机床操作有一定的基础,但实践经验不足,需要加强实际操作能力的培养。
教学要求:教师需结合课本内容,设计丰富的实践活动,引导学生积极参与,确保课程目标的实现。
同时,注重培养学生的团队协作、沟通能力和安全意识,为将来的职业生涯打下坚实基础。
通过本课程的学习,使学生能够达到预期学习成果,为后续课程和实际工作奠定基础。
二、教学内容1. 四机位专用机床基本结构:讲解机床的床身、立柱、横梁、滑座、刀架等主要部件的结构特点,结合教材第二章内容。
2. 工作原理:介绍四机位专用机床的工作原理,包括电机、传动系统、数控系统等,与教材第三章内容相结合。
3. 功能特点:分析四机位专用机床在加工精度、效率、自动化程度等方面的优势,参照教材第四章内容。
4. 应用场景:展示四机位专用机床在航空、汽车、模具等领域的应用案例,结合教材第五章内容。
5. 编程与操作:教授四机位专用机床的编程方法和操作技巧,包括手动编程、自动编程及操作界面,依据教材第六章内容。
四工位专用机床课程设计
目录一,功能原理和设计要求 (1)1)工作原理2)设计要求二,功能分解和运动分析1)功能分解2)运动分析三,拟定运动循环图四,执行机构选型五,传动机构选型六,机械运动方案的选择七,机械运动方案简图八,尺寸计算1)机器整体轮廓打消的确定2)电机的选型3)减速器的传动设计4)槽轮的尺寸计算5)直动推杆圆柱凸轮的尺寸设计九,机械运动方案的评价和改进一,功能原理和设计要求1.工作原理四工位专用机床是在四个工位上分别完成相应的装卸工件,钻孔,扩孔,绞孔工作,它执行动作有两个:一时装有四工位工件的回转台转动;二十装有由专用电动机丹东的三把专用刀具的主轴箱的刀具的转动和移动。
2.设计要求1)顶端离开工件表面65mm,快速移动送进了60mm后,再匀速送进60mm(包括5mm刀具切入量,45mm工件孔深,10mm刀具切出量),然后快速返回,回程和工作行程的平均速度只比K=2.2)刀具匀速进给速度为2mm/s,工件装,卸时间不超过10s.3)生产率为每小时约75件。
4)执行机构系统应装入机体内。
二.功能分解和运动分析1.功能分解通过对工作原理和设计要求的分析可知,四工位专用机床的回转台与主轴箱的功能分为一下几个动作:1)安装工件的回转台间歇转动。
2)安装刀具的主轴箱要完成快进,匀速进给,快速返回几个动作。
3)主轴箱上的刀具转动切削工件。
2..运动分析设选定电动机型号为Y160M2—8,其转速n=720r/min,P=5.5km,则四工位专用机床的一个周期内的详细运动情况为:1)电动机作为驱动,通过减速装和其他齿轮系将符合要求的转速传递给回转台上的间歇机构,使其做间歇转动,同时也将符合要求的转速传递给主轴箱下的刀具移动机构,使其做符合要求的动作。
2)当间歇机构开始第一次循环时,安装,并加紧工件,间歇机构从0°转至90°3)间歇机构从从90°转至180°,主轴完成一次工作循环(快进,刀具匀速进给,快退)。
四工位专业机床课程设计

四工位专业机床课程设计一、课程目标知识目标:1. 学生能够掌握四工位专业机床的基本结构、功能及操作流程。
2. 学生能够理解机床坐标系、工件坐标系及编程中的坐标变换原理。
3. 学生能够运用所学知识,对中等复杂程度的零件进行加工工艺分析及编程。
技能目标:1. 学生能够熟练操作四工位专业机床,完成铣削、钻削等基本加工任务。
2. 学生能够运用CAD/CAM软件进行零件造型、加工路径规划及生成加工程序。
3. 学生能够根据实际加工要求,合理选择切削参数,提高加工效率及质量。
情感态度价值观目标:1. 培养学生对机械加工行业的兴趣和热爱,激发他们投身制造业的积极性。
2. 培养学生严谨、细致的工作态度,提高他们在实际工作中解决问题的能力。
3. 培养学生的团队协作意识,使他们能够在实际工作中与同事密切配合,共同完成任务。
本课程针对中职或高职学生,结合四工位专业机床的实际情况,注重理论联系实际,提高学生的实际操作能力和工艺分析能力。
课程目标旨在帮助学生掌握机床操作、加工工艺及编程等方面的知识,为将来从事机械加工行业工作打下坚实基础。
同时,注重培养学生的情感态度和价值观,使他们成为具有较高职业素养的技能型人才。
1. 四工位专业机床结构及功能:介绍机床的组成、各部件的功能及作用,以教材第3章为基础,重点讲解主轴、进给系统、冷却系统等关键部分。
2. 坐标系及坐标变换:以教材第4章为参考,讲解机床坐标系、工件坐标系的建立及编程中的坐标变换方法。
3. 零件加工工艺分析:结合教材第5章,分析铣削、钻削等加工工艺,教授学生如何根据零件图纸制定合理的加工方案。
4. CAD/CAM软件应用:以教材第6章为例,教授学生使用CAD/CAM软件进行零件造型、加工路径规划及生成加工程序。
5. 切削参数的选择:参考教材第7章,讲解切削速度、进给量、切削深度等参数对加工效率和质量的影响,教授学生如何合理选择切削参数。
6. 实践操作:安排教材第8章内容,指导学生进行四工位专业机床的操作,完成铣削、钻削等基本加工任务。
课程设计---四工位机床

课程设计---四工位机床
四工位机床机床是一种常见的大型数控机床,它将加工、测量、工具改造和采样等工
作集中到一台机床上,能够实现多个加工程序的完整、可靠的加工作业。
经过几十年的发展,四工位机床已广泛应用于多种行业,例如汽车行业、电子行业、航空航天行业等,是
高精度制造业的重要组成部分。
四工位机床是一种多功能加工中心,它拥有4个工作站,每个工作站都集成了不同的
功能单元,可以完成各种复杂的加工作业,充分减少加工时间和生产成本。
同时,四工位
机床还可以通过机器人完成辅助加工,如自动换刀、自动补料、机器人搬运等。
由于四工位机床拥有四个工作站,所以管理与保养相对较为复杂,要求使用者具备较
强的实际工作能力和技术能力,以便更好地操作和维护四工位机床。
而且,四工位机床还
应具备一定的安全措施,帮助操作者有效防止和缓解可能发生的危险和事故。
四工位机床在工作时应注意一定的安全比例,操作者必须具备基本的安全知识,避免
不安全操作,及时发现和消除机床的潜在的安全隐患。
另外,四工位机床的操作者应定期
接受安全培训,以提高自身的安全技能,为更好地操作和保养四工位机床提供有效的参考。
工位专用机床设计说明书完整版

工位专用机床设计说明书HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】附件:目录1.设计任务工作原理及工艺动作过程四工位机床是在四个工位上分别完成相应的装卸工件、钻孔、扩孔、铰孔工作。
它的执行动作有两个:一是装有四工位工件的回转运动;二是装有专用电动机带动三把专用的主轴箱的刀具转动和水平往复移动。
原始数据及设计要求⑴刀具顶端离开工作表面65mm,快速移动送进60mm后,再匀速送进60mm(包括5mm 刀具切入量,45mm工件孔深,10mm刀具切出量,如图①所示),然后快速返回。
回程和进程的平均速度之比为K=2。
⑵刀具的匀速给进速度为2mm/s工作装卸时间不超过10s。
⑶机床生产效率每小时约60件。
⑷执行机构及传动机构能装入机体内。
⑸传动系统电机为交流异步电动机,功率,转速960r/min。
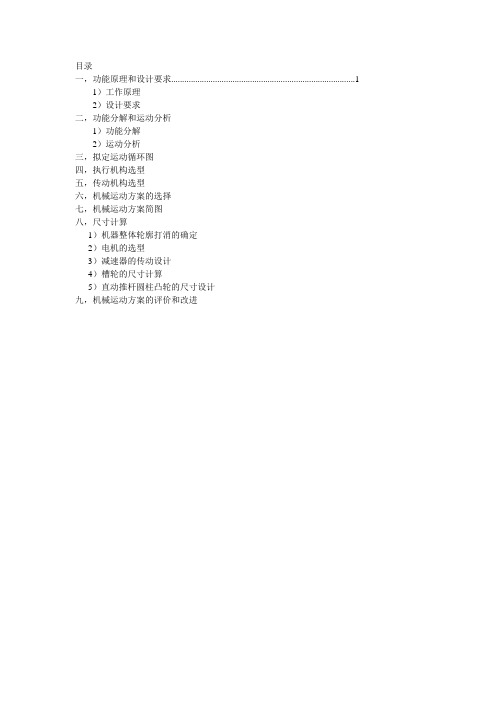
图①孔的典型加工工艺及刀具孔的加工包括从实体材料上加工孔和对已有孔进行加工两大类。
麻花钻是在实体材料上加工孔的常用刀具,加工精度较低。
扩孔钻和铰刀是用于对已有孔进行加工的刀具。
扩孔钻的外形和麻花钻相类似,只是加工余量小,刀齿数目比麻花钻多,加工后孔的质量较好,一般能达IT10—11级精度。
铰刀是提高被加工孔质量的半精加工或精加工刀具,切削时加工余量更小,刀齿数目更多,加工后孔的精度最高可达IT8。
孔加工刀具示意图2.功能分解与运动分析功能分解通过对设计任务的了解,可以看出,四工位专用机床的加工部分可以分为如下几个工艺动作。
(4)安装工作台的间歇转转动。
(5)安装刀具的主轴箱应按要求进行静止,快进,快给,快退的工艺动作。
(6)刀具转动。
画出四工位专用机床的动作要求图。
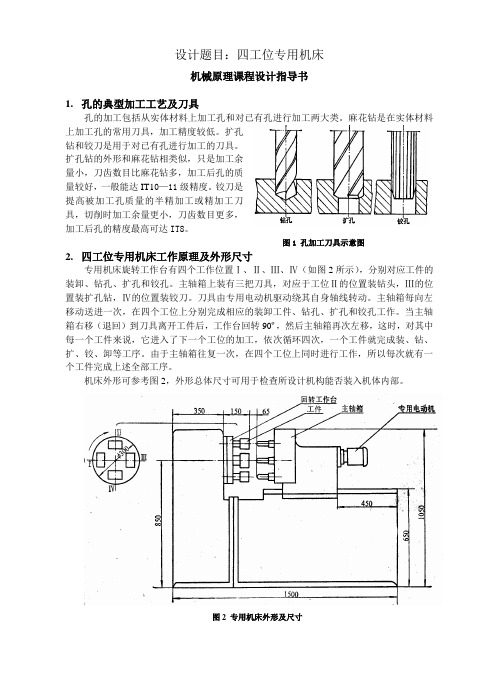
四工位专用机床工作原理及外形尺寸专用机床旋转工作台有四个工作位置Ⅰ、Ⅱ、Ⅲ、Ⅳ(如图2所示),分别对应工件的装卸、钻孔、扩孔和铰孔。
主轴箱上装有三把刀具,对应于工位Ⅱ的位置装钻头,Ⅲ的位置装扩孔钻,Ⅳ的位置装铰刀。
四工位钻床课程设计
设计题目:四工位专用机床机械原理课程设计指导书1.孔的典型加工工艺及刀具孔的加工包括从实体材料上加工孔和对已有孔进行加工两大类。
麻花钻是在实体材料上加工孔的常用刀具,加工精度较低。
扩孔钻和铰刀是用于对已有孔进行加工的刀具。
扩孔钻的外形和麻花钻相类似,只是加工余量小,刀齿数目比麻花钻多,加工后孔的质量较好,一般能达IT10—11级精度。
铰刀是提高被加工孔质量的半精加工或精加工刀具,切削时加工余量更小,刀齿数目更多,加工后孔的精度最高可达IT8。
图1 孔加工刀具示意图2.四工位专用机床工作原理及外形尺寸专用机床旋转工作台有四个工作位置Ⅰ、Ⅱ、Ⅲ、Ⅳ(如图2所示),分别对应工件的装卸、钻孔、扩孔和铰孔。
主轴箱上装有三把刀具,对应于工位Ⅱ的位置装钻头,Ⅲ的位置装扩孔钻,Ⅳ的位置装铰刀。
刀具由专用电动机驱动绕其自身轴线转动。
主轴箱每向左移动送进一次,在四个工位上分别完成相应的装卸工件、钻孔、扩孔和铰孔工作。
当主轴箱右移(退回)到刀具离开工件后,工作台回转90º,然后主轴箱再次左移,这时,对其中每一个工件来说,它进入了下一个工位的加工,依次循环四次,一个工件就完成装、钻、扩、铰、卸等工序。
由于主轴箱往复一次,在四个工位上同时进行工作,所以每次就有一个工件完成上述全部工序。
机床外形可参考图2,外形总体尺寸可用于检查所设计机构能否装入机体内部。
图2 专用机床外形及尺寸3.设计步骤1)执行机构的选型根据专用机床的功能要求,回转工作台做单向间歇运动,主轴箱做往复直线运动。
实现工作台单向间歇运动的机构有棘轮机构、槽轮机构、凸轮机构、不完全齿轮机构等,实现主轴箱往复直线运动的机构有连杆机构和凸轮机构等。
上述机构的结构、工作原理及特点见参考材料1、2。
机构选型应遵循以下原则。
表1 选用执行机构的原则与方法2)机械运动方案的评价对上述两执行机构,做其形态学矩阵,可得到为数众多的方案。
机械运动方案的拟定,最终要求通过分析比较提供最佳方案。
四工位加工机床课程设计

四工位加工机床课程设计一、课程目标知识目标:1. 学生能够理解并掌握四工位加工机床的基本结构及其工作原理;2. 学生能够了解并描述四工位加工机床的常见加工工艺流程;3. 学生能够掌握四工位加工机床的安全操作规程和相关术语。
技能目标:1. 学生能够独立操作四工位加工机床完成指定零件的加工;2. 学生能够运用CAD/CAM软件进行四工位加工机床的编程;3. 学生能够解决四工位加工机床操作过程中遇到的一般性问题。
情感态度价值观目标:1. 培养学生热爱机械加工专业,增强其对制造业的认识和兴趣;2. 培养学生具有良好的团队合作精神,遵守加工机床操作规程,养成良好的安全生产意识;3. 培养学生勇于创新,善于思考,具备解决实际问题的自信心。
课程性质:本课程为机械加工专业课程,以实践操作为主,理论联系实际。
学生特点:学生具备一定的机械加工基础知识,动手能力较强,对新鲜事物充满好奇心。
教学要求:教师需结合学生特点,采用讲解与实践相结合的教学方法,充分调动学生的学习积极性,注重培养其操作技能和解决问题的能力。
在教学过程中,关注学生的个体差异,鼓励学生相互交流与合作,确保课程目标的实现。
通过本课程的学习,使学生具备四工位加工机床操作所需的基本知识和技能,为未来从事相关领域工作打下坚实基础。
二、教学内容1. 四工位加工机床概述:介绍四工位加工机床的发展历程、分类及其在制造业中的应用。
教材章节:《机械加工机床》第二章第一节。
2. 四工位加工机床的结构与原理:详细讲解四工位加工机床的各个组成部分及其工作原理。
教材章节:《机械加工机床》第二章第二节。
3. 四工位加工机床的加工工艺:分析四工位加工机床的加工工艺流程、参数设置及优化。
教材章节:《机械加工机床》第二章第三节。
4. 四工位加工机床操作与编程:讲解四工位加工机床的安全操作规程、编程方法及注意事项。
教材章节:《机械加工机床》第二章第四节。
5. 四工位加工机床维护与故障排除:介绍四工位加工机床的日常维护保养方法及常见故障的排除方法。
四工位专用机床机械原理课程设计

目录一.功能分解和运动分析 (2)二.执行机构选型 (4)三.传动机构选型 (5)四.机械整体运动方案的选择 (7)五.机械运动方案简图 (10)六.机械运动方案的计算 (11)七.仿真运动及图表分析 (15)八.课程设计小结 (17)九.参考文献 (18)一、功能分解和运动分析1.功能分解通过对设计任务的了解,可以看出,四工位专用机床的加工部分可以分为如下几个工艺动作:1)安装工作台的间歇转动。
2)安装刀具的主轴箱应按要求进行静止、快进、进给、快退的工艺动作。
3)刀具转动。
画出四工位专用机床的动作要求图。
其中4位置为铰孔位置,1位置为装卸工件,2位置为钻孔位置,3位置为扩孔位置。
如表1所示根据工艺动作推出其工作循环为:表1 四工位专用机床功能图同时得到四工位专用机床的树状功能图(如下图)该专用要求机床要求三个动作的协调运行,即刀架进给、卡盘旋转和卡盘的定位。
要确保在刀具与工件接触时卡盘固定不动,刀具退出工件到下次工作前完成卡盘旋转动作。
几个动作必须协调一致,并按照一定规律运动。
2.运动分析通过合适的减速机构以及轮系机构,使工作台进行每次旋转90°的间歇运动。
1.电动机作为驱动,通过减速器与其他轮系传动将符合要求的转速传递给工作回转台上的间歇机构,使其间歇转动。
2.在间歇机构开始一次循环时,安装并夹紧工件,间歇机构从0°转至90°。
3.间歇机构从 90°转至 180°,主轴箱完成一次工作循环(快进、刀具匀速送进和快退)。
4.间歇机构从180° 转至 270° ,主轴箱完成一次工作循环(快进、刀具匀速送进和快退)。
5.间歇机构从 270° 转至 360° ,主轴箱完成一次工作循环(快进、刀具匀速和快退),并将加工好的工件取下。
表2 四工位专用机床执行机构的运动循环图说明:上图表明了工作台和主轴箱配合运动,主轴箱快速进刀60mm 用时2s ,匀速进刀60mm 用时30s ,快速回程120mm 用时16s 。
四工位机床课程设计

四工位机床 课程设计一、课程目标知识目标:1. 让学生理解并掌握四工位机床的基本结构、工作原理及功能;2. 了解四工位机床在制造业中的应用,以及其在现代工业生产中的重要性;3. 掌握四工位机床的操作步骤、编程方法及相关注意事项。
技能目标:1. 培养学生运用四工位机床进行加工的动手操作能力,提高其操作熟练度和准确性;2. 培养学生编制四工位机床加工程序的能力,使其能够根据实际需求设计合理的加工方案;3. 培养学生运用四工位机床解决实际问题的能力,提高其创新意识和实践能力。
情感态度价值观目标:1. 激发学生对制造业的兴趣,培养其热爱机械、追求技术进步的情感态度;2. 培养学生具备安全生产意识,使其认识到遵守操作规程、确保生产安全的重要性;3. 引导学生树立团队协作意识,培养其在实际工作中沟通、协调、合作的能力。
课程性质分析:本课程属于机械加工领域,具有较强的实践性和应用性。
结合学生特点,注重理论知识与实践操作的相结合,以培养学生的实际操作能力和解决问题能力为核心。
学生特点分析:学生为高年级学生,具有一定的机械基础知识、动手能力和自主学习能力。
在此基础上,通过本课程的学习,使其能够更好地掌握四工位机床的操作与应用。
教学要求:1. 理论教学与实践教学相结合,注重学生的实际操作训练;2. 教师引导学生积极参与课堂讨论,培养学生的思维能力和创新意识;3. 强化安全意识教育,确保学生在操作过程中的人身安全和设备安全;4. 注重课后评估,及时了解学生的学习进度和成果,调整教学方法和策略。
二、教学内容1. 四工位机床概述- 机床基本结构- 工作原理与功能- 四工位机床在制造业中的应用2. 四工位机床操作与编程- 操作步骤与方法- 编程基本原理- 编程实例分析3. 四工位机床加工工艺- 加工工艺参数选择- 刀具选择与使用- 工件装夹与定位4. 四工位机床安全与维护- 安全操作规程- 常见故障分析与排除- 机床日常维护与保养5. 实践操作环节- 四工位机床操作训练- 编程与加工实践- 综合加工案例分析与操作教学内容安排与进度:第一周:四工位机床概述第二周:四工位机床操作与编程第三周:四工位机床加工工艺第四周:四工位机床安全与维护第五周:实践操作环节(一)第六周:实践操作环节(二)第七周:综合加工案例分析与操作教材章节及内容:第一章:机床概述第二章:机床操作与编程第三章:加工工艺第四章:机床安全与维护第五章:实践操作案例教学内容科学性和系统性:确保教学内容与课程目标紧密结合,遵循由浅入深、循序渐进的原则,注重理论与实践相结合,提高学生的实际操作能力。
四工位专用机床课程设计

一,功能原理和设计要求 1.工作原理
四工位专用机床是在四个工位上分别完成相应的装卸工件,钻孔,扩孔,绞孔工作,它执行动作 有 两个:一时装有四工位工件的回转台转动;二十装有由专用电动机丹东的三把专用刀具的主轴箱的 刀具 的转动和移动。
2.设计要求 1 顶端离开工件表面 65mm,快速移动送进了 60mm 后,再匀速送进 60mm(包括 5mm 刀具切入量 ,
45mm 工件孔深,10mm 刀具切出量),然后快速返回,回程和工作行程的平均速度只比 K=2. 2 刀具匀速进给速度为 2mm/s,工件装,卸时间不超过 10s. 3 生产率为每小时约 75 件。
4 执行机构系统应装入机体内。
二.功能分解和运动分析
1.功能分解 通过对工作原理和设计要求的分析可知,四工位专用机床的回转台与主轴箱的功能分为一下几
方案一:槽轮机构。如图 3—1 所示槽轮机构的结构简单外形尺寸小,机械效率高,并能较平稳的,间 歇的进行转位。但因传动时尚存在柔性冲击,故常用于速度不高的场合。
方案二:不完全齿轮机构。如图 3—2 所示,它室友齿轮机构演变而得到的一种间歇欲动机构。即在主动 轮上制作出一部分齿,并根据运动时间与停歇时间的要求,在从动轮上做出与主动轮轮齿相啮合的轮齿 。 当从动轮做连续回转运动时,从东轮做间歇回转运动。不完全齿轮的结构简单,制造容易,工作可靠 , 设计时从动轮的运动时间和静止时间的比例可在较大范围内变化。其缺点是有较大冲击,故质疑与 低速, 轻载场合。
功能元解(匹配机构)
回转台间歇运动机构 主轴箱刀具移动机构 传动机构
1
槽轮机构 凹槽圆柱凸轮机构 定轴轮系减速器
2
3
不完全齿轮机构 盘装凸轮机构 外啮合行星齿轮减速器
棘轮机构 凸轮连杆机构
四工位机床课程设计

目录1 设计任务书1.1 设计任务 (02)1.2 设计要求 (02)2 方案设计与选择2.1 回转台的间歇转动 (03)2.1.1 棘轮机构 (03)2.1.2 槽轮机构(马尔它机构) (03)2.1.3 不完全齿轮机构 (04)2.1.4 凸轮式间歇运动机构 (04)2.2主轴箱的往复移动 (05)2.2.1 曲柄滑块机构 (05)2.2.2 圆柱凸轮机 (05)2.2.3 盘形凸轮机构 (06)2.2.4 凸轮连杆机构 (06)2.3 减速机构 (07)2.3.1 蜗轮蜗杆机构 (07)2.3.2 链传动机构 (07)2.3.3 定轴轮系 (07)2.3.4 外啮合行星轮系 (08)2.4 方案选择 (08)2.4.1 方案列表 (08)2.4.2 选择标准 (08)2.4.3 方案比较 (08)2.5 机械运动循环图 (09)2.6 数据计算 (10)2.6.1 减速机构 (10)2.6.2 主轴箱的往复移动 (10)2.6.3 回转台的间歇转动 (10)2.7 参考资料 (11)1 设计任务书1.1 设计任务:1 按工艺动作过程拟定机构运动循环图2 进行回转台间歇机构,主轴箱道具移动机构的选型,并进行机械运动方案评价和选择3 按选定的电动机和执行机构的运动参数进行机械传动方案的拟定4 对传动机构和执行机构进行运动尺寸设计5 在2号图纸上画出最终方案的机构运动简图6 编写设计计算说明书。
1.2 设计要求:1 刀具顶端离开工作表面65mm,快速移动送进60mm后,再匀速送进60mm(包括5mm 刀具切入量、45mm工件孔深、10mm刀具切出量,如图所示),然后快速返回。
回程和进程的平均速度之比K=2。
2 刀具匀速进给速度为2mm/s,工件装卸时间不超过10s。
3 机床生产率每小时约75件。
4 执行机构及传动机构能装入机体内。
5 传动系统电机为交流异步电动机,功率1.5Kw,转速960r/min。
四工位专用机床课程设计说明书(超详细)
设计任务书设计任务:1 按工艺动作过程拟定机构运动循环图2 进行回转台间歇机构,主轴箱道具移动机构的选型,并进行机械运动方案评价和选择3 按选定的电动机和执行机构的运动参数进行机械传动方案的拟定4 对传动机构和执行机构进行运动尺寸设计5 在2号图纸上画出最终方案的机构运动简图6 编写设计计算说明书设计要求:1 从刀具顶端离开工件表面65mm位置,快速移动送进了60mm后,在匀速送进60mm(5mm刀具切入量,45mm工件孔深,10mm刀具切出量),然后快速返回。
回程和工作行程的速比系数K=2。
2 生产率约每小时60件。
3 刀具匀速进给速度2mm/s,工件装、卸时间不超过10s。
4 执行机构能装入机体内。
机械运动方案设计根据专用机床的工作过程和规律可得其运动循环图如下:机构运动循环图该专用机床要求三个动作的协调运行,即刀架进给、卡盘旋转和卡盘的定位。
其工作过程如下:机床工作运动模型要确保在刀具和工件接触时卡盘固定不动,刀具退出工件到下次接触工件前完成卡盘旋转动作。
几个动作必须协调一致,并按照一定规律运动。
机械总体结构设计一、原动机构:原动机选择Y132S-4异步电动机,电动机额定功率P=5.5KW,满载转速n=1440r/min。
二、传动机构:传动系统的总传动比为i=n/n6,其中n6为圆柱凸轮所在轴的转速,即总传动比为1440/1。
采用涡轮蜗杆减速机构(或外啮合行星减速轮系)减速。
三、执行部分总体部局:执行机构主要有旋转工件卡盘和带钻头的移动刀架两部分,两个运动在工作过程中要保持相当精度的协调。
因此,在执行机构的设计过程中分为,进刀机构设计、卡盘旋转机构和减速机构设计。
而进刀机构设计归结到底主要是圆柱凸轮廓线的设计,卡盘的设计主要是间歇机构的选择。
在执行过程中由于要满足相应的运动速度,因此首先应该对于原动机的输出进行减速。
下面先讨论减速机构传动比的确定:由于从刀具顶端离开工件表面65mm位置,快速移动送进了60mm后,在匀速送进60mm(5mm 刀具切入量,45mm工件孔深,10mm刀具切出量),然后快速返回。
四工位专用机床课设
机械工程学院机械原理课程设计说明书设计题目:四工位专用机床设计专业:机械设计制造及其自动化班级: 09机制(1)班姓名:唐希强学号0900110115指导教师:黄美发老师2012年1月12日目录课设题目 2 设计任务和注意事项 5 方案构思和对比 6 机械运动方案设计 8 机械总体结构设计 9 机械传动系统设计 18 课设体会19一.课设题目四工位专用机床专用机床旋转工作台有四个工作位置Ⅰ、Ⅱ、Ⅲ、Ⅳ(如上图所示),分别对应工件的装卸、钻孔、扩孔和铰孔。
主轴箱上装有三把刀具,对应于工位Ⅱ的位置装钻头,Ⅲ的位置装扩孔钻,Ⅳ的位置装铰刀。
刀具由专用电动机驱动绕其自身轴线转动。
主轴箱每向左移动送进一次,在四个工位上分别完成相应的装卸工件、钻孔、扩孔和铰孔工作。
当主轴箱右移(退回)到刀具离开工件后,工作台回转90º,然后主轴箱再次左移,这时,对其中每一个工件来说,它进入了下一个工位的加工,依次循环四次,一个工件就完成装、钻、扩、铰、卸等工序。
由于主轴箱往复一次,在四个工位上同时进行工作,所以每次就有一个工件完成上述全部工序。
2.系统功能图3原始数据及设计要求1)刀具顶端离开工作表面55mm,快速移动送进50mm后,再匀速送进45mm(包括5mm刀具切入量、45mm工件孔深、10mm 刀具切出量,如右图所示),然后快速返回。
回程和进程的平均速度之比K=2.2。
2)刀具匀速进给速度为2.2mm/s,工件装卸时间不超过8s。
3)机床生产率每小时约70件。
4)执行机构及传动机构能装入机体内。
5)传动系统电机为交流异步电动机,功率5.5Kw,转速1440r/min。
二.设计任务1.按工艺动作过程拟定机构运动循环图2.进行回转台间歇机构,主轴箱刀具移动机构的选型,并进行机械运动方案评价和选择。
3.按选定的电动机和执行机构的运动参数进行机械运动方案的拟定。
4.对传动机构和运动机构进行运动尺寸设计。
5.在1号纸上画出最终方案的机构运动简图。
四工位专用机床课程设计说明书(超详细)

设计任务书设计任务:1 按工艺动作过程拟定机构运动循环图2 进行回转台间歇机构,主轴箱道具移动机构的选型,并进行机械运动方案评价和选择3 按选定的电动机和执行机构的运动参数进行机械传动方案的拟定4 对传动机构和执行机构进行运动尺寸设计5 在2号图纸上画出最终方案的机构运动简图6 编写设计计算说明书设计要求:1 从刀具顶端离开工件表面65mm位置,快速移动送进了60mm后,在匀速送进60mm (5mm刀具切入量,45mm工件孔深,10mm刀具切出量),然后快速返回。
回程和工作行程的速比系数K=2。
2 生产率约每小时60件。
3 刀具匀速进给速度2mm/s,工件装、卸时间不超过10s。
4 执行机构能装入机体内。
机械运动方案设计根据专用机床的工作过程和规律可得其运动循环图如下:钻头头进匀速60°快钻0°240°进钻头快退工作台转动307.4°位销插入定定位销拔出工作台静止凸轮钻397.4°该专用机床要求三个动作的协调运行,即刀架进给、卡盘旋转和卡盘的定位。
其工作过程如下:要确保在刀具与工件接触时卡盘固定不动,刀具退出工件到下次接触工件前完成卡盘旋转动作。
几个动作必须协调一致,并按照一定规律运动。
机械总体结构设计一、原动机构:原动机选择Y132S-4异步电动机,电动机额定功率P=5.5KW,满载转速n=1440r/min 。
二、传动机构:传动系统的总传动比为i=n/n 6,其中n 6为圆柱凸轮所在轴的转速,即总传动比为1440/1。
采用涡轮蜗杆减速机构(或外啮合行星减速轮系)减速。
三、执行部分总体部局:执行机构主要有旋转工件卡盘和带钻头的移动刀架两部分,两个运动在工作过程中要保持相当精度的协调。
因此,在执行机构的设计过程中分为,进刀机构设计、卡盘旋转机构和减速机构设计。
而进刀机构设计归结到底主要是圆柱凸轮廓线的设计,卡盘机构运动循环图机床工作运动模型的设计主要是间歇机构的选择。
4工位专用机床课程设计

4工位专用机床课程设计一、教学目标本课程旨在让学生了解和掌握4工位专用机床的基本原理、结构特点及其应用。
通过本课程的学习,学生应能:1.描述4工位专用机床的工作原理、结构组成及其功能。
2.分析并解释4工位专用机床在现代制造业中的应用。
3.运用所学知识,对4工位专用机床进行简单的操作和维护。
4.能够查阅相关资料,了解4工位专用机床的最新发展动态。
二、教学内容本课程的教学内容主要包括以下几个部分:1.4工位专用机床的概述:介绍4工位专用机床的概念、分类、特点及应用领域。
2.4工位专用机床的结构:详细讲解4工位专用机床的各个组成部分,包括主轴、刀架、工作台等。
3.4工位专用机床的工作原理:阐述4工位专用机床的工作原理及其在工作过程中的作用。
4.4工位专用机床的操作与维护:介绍4工位专用机床的操作步骤、注意事项以及维护方法。
5.4工位专用机床的应用案例:分析4工位专用机床在实际生产中的应用案例,让学生更好地理解其作用。
三、教学方法为了提高学生的学习兴趣和主动性,本课程将采用多种教学方法相结合的方式进行教学:1.讲授法:通过讲解4工位专用机床的基本原理、结构特点及应用,使学生掌握相关知识。
2.案例分析法:分析实际应用案例,让学生更好地理解4工位专用机床在生产中的作用。
3.实验法:安排实验室实践环节,让学生亲自操作4工位专用机床,提高实际操作能力。
4.讨论法:学生进行小组讨论,分享学习心得,互相促进。
四、教学资源为了支持教学内容和教学方法的实施,丰富学生的学习体验,我们将准备以下教学资源:1.教材:选用权威、实用的教材,为学生提供系统、全面的知识体系。
2.参考书:提供相关的参考书籍,便于学生查阅资料,拓展视野。
3.多媒体资料:制作精美的PPT、视频等多媒体资料,增强课堂教学的趣味性。
4.实验设备:保证实验室设备齐全,为学生提供充足的实践操作机会。
五、教学评估本课程的评估方式包括平时表现、作业和考试三个部分,每个部分所占比例分别为40%、30%和30%。
贵州大学课程设计——四工位钻床设计说明书

课程设计课程名称: 四工位专用机床设计学院:专业:姓名:学号:年级:任课教师:四工位专用机床设计说明书目录第一章:功能原理和设计要求 (3)第二章:原始数据及设计要求 (3)第三章:方案设计提示 (4)第四章:设计任务 (4)第五章:功能分解和运动分析 (5)第六章:四工位加工系统运动方案的构思 (7)第七章:执行部分总体部局 (10)第八章:对传动机构和执行机构进行运动尺寸计算 (10)第九章:课程设计的感想 (19)参考文献 (20)一、功能要求及工艺动作提示(1)总共能要求:实现对工件的装卸、钻孔、扩孔、铰孔。
(2)工作原理及工艺动作分解提示:四工位专用机床的工作台有Ⅰ、Ⅱ、Ⅲ、Ⅳ四个工作位置(图1),工位Ⅰ是装卸工件,Ⅱ是钻孔,Ⅲ是扩孔,Ⅳ是铰孔。
主轴箱上装有三把刀具,对应于工位Ⅱ的位置装钻头,Ⅲ的位置装扩孔钻,Ⅳ的位置装铰刀。
刀具由专用电机带动绕其自身的轴线转动。
主轴箱每向左移动送进一次,在四个工位上分别完成相应的装卸工件、钻孔、扩孔、铰孔工作。
当主轴箱右移(退回)到刀具离开工件后,工作台回转90º,然后主轴箱再次左移,这时,对其中每一个工件来说,它进入了下一个工位的加工,依次循环四次,一个工件就完成装、钻、扩、铰、卸等工序。
由于主轴箱往复一次,在四个工位上同时进行工作,所以每次就有一个工件完成上述全部工序。
因此,四工位专用机床的执行动作有两个:一是回转台的间歇转动,二是主轴箱的刀具转动和移动。
二、原始数据及设计要求(1) 刀具顶端离开工件表面65mm(图1),快速移动送进60mm接近工件后,匀速送进60 mm(前5mm为刀具接近工件时的切入量,工件孔深45mm,后10mm为刀具切出量),然后快速返回。
回程和工作行程的平均速比(行程速度变化系数)K =2。
图1 专用机床外形及尺寸(2) 执行机构系统应装入机体内,机床外形尺寸见图1。
三、方案设计提示(1)回转台的间歇转动和主轴箱的刀具往复移动,两套机构均由一个电机带动,故工作台转位机构和主轴箱往复运动机构按动作时间顺序分支并列,组合成一个机构系统。
四工位专用机床
机械原理课程设计 题目四工位专用机床学 院机电学院专业年级09机自学号姓名0961010426 熊杰指导教师廖华丽二○一一 年 六 月设计任务书1. 设计题目四工位专用机床2. 工作原理及工艺动作过程四工位专用机床是在四个工位上分别完成相应的装卸工件、钻孔、扩孔、绞孔工作。
它的执行动作有两个:一是装有四工位工件的回转台转动;二是装有由专用电动机带动的三把专用刀具的主轴箱的刀具转动和移动。
3. 原始数据及设计要求1)刀具顶端离开工作表面65mm,快速移动送进了60mm后,再匀速送进60 mm(包括5mm刀具切入量、45mm工件孔深、10mm刀具切出量),然后快速返回。
回程和工作行程的平均速度之比=2。
K2)刀具匀速进给速度为2 mm/s,工件装、卸时间不超过10 s。
3)生产率为每小时约75件。
4)执行机构能装入机体内。
4. 设计方案提示1)回转台的间歇转动,可采用槽轮机构、不完全齿轮机构、凸轮式间歇机构。
2)主轴箱的刀具移动,可采用圆柱凸轮机构、移动从动件盘形凸轮机构、凸轮—连杆机构、平面连杆机构等。
3)由生产率可求出一个运动循环所需时间60487560T==s,刀具匀速送进60mm所需时间60302t==匀s,刀具其余移动(包括快速送进60mm,快速返回120mm)共需18 s。
回转工作台静止时间为36 s,因此足够工件装卸所需时间。
5. 设计任务1)按工艺动作过程拟定运动循环图。
2)进行回转台间歇转动机构,主轴箱刀具移动机构的选型,并进行机械运动方案评价和选择。
3)按选定的电动机和执行机构的运动参数进行机械传动方案的拟定。
4)活出机械运动方案简图。
5)对传动机构和执行机构进行运动尺寸计算。
Abstracts四工位专用机床是在四个工位上分别完成相应的装卸工件、钻孔、扩孔和绞孔工作的专用加工设备,其执行动作主要包括回转台的间歇转动和主轴箱的左右移动,二者相互协作、共同配合完成孔的精确加工。
针对以上功能和运动要求,本文对四工位专用机床的设计方案作了详细的说明,包括功能分解、运动分析、循环图的拟定、机械运动方案的选择、整体轮廓的大小设计和各机构的尺寸计算。
四工位专用机床课程设计

四工位专用机床课程设计一、课程目标知识目标:1. 学生能理解并掌握四工位专用机床的基本结构及其功能。
2. 学生能够描述四工位专用机床的工作原理和加工流程。
3. 学生能够掌握四工位专用机床的操作步骤和安全规范。
技能目标:1. 学生能够运用CAD/CAM软件设计出符合四工位专用机床加工要求的产品零件。
2. 学生能够独立进行四工位专用机床的操作,完成零件的加工。
3. 学生能够分析并解决在四工位专用机床操作过程中遇到的问题。
情感态度价值观目标:1. 学生培养对机械加工行业的热爱和责任感,增强对我国制造业的自豪感。
2. 学生树立安全意识,养成良好的操作习惯,尊重生产实践。
3. 学生学会团队合作,培养沟通能力和解决问题的能力。
课程性质:本课程为机械加工专业课,旨在帮助学生掌握四工位专用机床的操作和应用。
学生特点:学生为中职二年级,具备一定的机械加工基础,动手能力强,对新鲜事物充满好奇。
教学要求:课程注重实践操作,结合理论知识,提高学生的综合运用能力。
将目标分解为具体学习成果,为后续教学设计和评估提供依据。
二、教学内容1. 四工位专用机床概述- 机床基本结构及功能- 机床工作原理及加工范围2. 机床操作与编程- 操作步骤及安全规范- 编程基本指令与操作- CAD/CAM软件在四工位专用机床中的应用3. 零件加工实践- 零件图纸分析- 刀具选择与装夹- 加工参数设定- 零件加工过程监控与调整4. 常见问题分析与解决- 机床故障诊断与排除- 加工误差分析与纠正- 提高加工效率的方法与技巧5. 综合实训与考核- 团队合作完成零件加工任务- 操作技能与理论知识综合运用- 实训成果展示与评价教学内容安排与进度:第一周:四工位专用机床概述第二周:机床操作与编程第三周:零件加工实践第四周:常见问题分析与解决第五周:综合实训与考核教材章节及内容关联:《机械加工技术》第四章:机床及其应用《机械加工编程与操作》第三章:CAD/CAM软件应用《机械加工实训指导书》相关章节:机床操作与零件加工实践教学内容确保科学性和系统性,注重理论与实践相结合,提高学生的操作技能和解决问题的能力。
4工位专业机床课程设计

4工位专业机床课程设计一、课程目标知识目标:1. 学生能理解并掌握4工位专业机床的基本结构及其功能。
2. 学生能掌握机床操作的基本流程,包括机床准备、装夹、对刀和加工等环节。
3. 学生能掌握机床编程的基本知识,能够编写简单的4工位机床加工程序。
技能目标:1. 学生能够独立进行4工位专业机床的操作,包括装夹工件、调整刀具和执行加工程序。
2. 学生能够运用所学知识解决机床加工过程中出现的简单问题。
3. 学生通过实践操作,提高空间想象能力和动手能力。
情感态度价值观目标:1. 培养学生对机械加工行业的兴趣,提高其职业认识和专业认同感。
2. 培养学生严谨的工作态度和良好的团队协作精神,使其具备一定的职业素养。
3. 引导学生认识到机械加工在国民经济发展中的重要作用,激发学生的社会责任感和使命感。
本课程针对高年级学生,结合课程性质、学生特点和教学要求,将目标分解为具体的学习成果,以便后续的教学设计和评估。
通过本课程的学习,使学生不仅掌握专业知识,还提高实践操作能力,培养良好的职业素养和价值观。
二、教学内容本章节教学内容主要包括以下三个方面:1. 4工位专业机床基本结构及功能- 机床总体布局与组成部分- 各部件的结构特点及功能- 常见机床类型及适用范围2. 机床操作基本流程- 机床准备:包括机床检查、工具准备等- 装夹工件:掌握各种装夹方式及注意事项- 对刀操作:学会对刀方法,确保加工精度- 加工执行:按照程序进行机床操作,完成加工任务3. 机床编程基本知识- 编程语言及指令系统- 编程方法及步骤- 简单加工程序编写实例教学内容安排和进度如下:第1课时:4工位专业机床基本结构及功能第2课时:机床操作基本流程(1):机床准备与装夹工件第3课时:机床操作基本流程(2):对刀操作与加工执行第4课时:机床编程基本知识教学内容与课本紧密关联,涵盖机床操作与编程的基本知识,保证教学内容的科学性和系统性。
通过本章节学习,使学生能够掌握机床操作和编程的基本技能,为实际工作中的应用打下坚实基础。
(完整word版)四工位专用机床课程设计

目录一,功能原理和设计要求 (1)1)工作原理2)设计要求二,功能分解和运动分析1)功能分解2)运动分析三,拟定运动循环图四,执行机构选型五,传动机构选型六,机械运动方案的选择七,机械运动方案简图八,尺寸计算1)机器整体轮廓打消的确定2)电机的选型3)减速器的传动设计4)槽轮的尺寸计算5)直动推杆圆柱凸轮的尺寸设计九,机械运动方案的评价和改进一,功能原理和设计要求1.工作原理四工位专用机床是在四个工位上分别完成相应的装卸工件,钻孔,扩孔,绞孔工作,它执行动作有两个:一时装有四工位工件的回转台转动;二十装有由专用电动机丹东的三把专用刀具的主轴箱的刀具的转动和移动。
2.设计要求1)顶端离开工件表面65mm,快速移动送进了60mm后,再匀速送进60mm(包括5mm刀具切入量,45mm工件孔深,10mm刀具切出量),然后快速返回,回程和工作行程的平均速度只比K=2.2)刀具匀速进给速度为2mm/s,工件装,卸时间不超过10s.3)生产率为每小时约75件。
4)执行机构系统应装入机体内。
二.功能分解和运动分析1.功能分解通过对工作原理和设计要求的分析可知,四工位专用机床的回转台与主轴箱的功能分为一下几个动作:1)安装工件的回转台间歇转动。
2)安装刀具的主轴箱要完成快进,匀速进给,快速返回几个动作。
3)主轴箱上的刀具转动切削工件。
2..运动分析设选定电动机型号为Y160M2—8,其转速n=720r/min,P=5.5km,则四工位专用机床的一个周期内的详细运动情况为:1)电动机作为驱动,通过减速装和其他齿轮系将符合要求的转速传递给回转台上的间歇机构,使其做间歇转动,同时也将符合要求的转速传递给主轴箱下的刀具移动机构,使其做符合要求的动作。
2)当间歇机构开始第一次循环时,安装,并加紧工件,间歇机构从0°转至90°3)间歇机构从从90°转至180°,主轴完成一次工作循环(快进,刀具匀速进给,快退)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设计任务书设计任务:1 按工艺动作过程拟定机构运动循环图2 进行回转台间歇机构,主轴箱道具移动机构的选型,并进行机械运动方案评价和选择3 按选定的电动机和执行机构的运动参数进行机械传动方案的拟定4 对传动机构和执行机构进行运动尺寸设计5 在2号图纸上画出最终方案的机构运动简图6 编写设计计算说明书设计要求:1 从刀具顶端离开工件表面65mm位置,快速移动送进了60mm后,在匀速送进60mm(5mm刀具切入量,45mm工件孔深,10mm刀具切出量),然后快速返回。
回程和工作行程的速比系数K=2。
2 生产率约每小时60件。
3 刀具匀速进给速度2mm/s,工件装、卸时间不超过10s。
4 执行机构能装入机体内。
机械运动方案设计根据专用机床的工作过程和规律可得其运动循环图如下:机构运动循环图机械总体结构设计一、原动机构:原动机选择Y132S-4异步电动机,电动机额定功率P=5.5KW,满载转速n=1440r/min。
二、传动机构:传动系统的总传动比为i=n/n6,其中n6为圆柱凸轮所在轴的转速,即总传动比为1440/1。
采用涡轮蜗杆减速机构(或外啮合行星减速轮系)减速。
三、执行部分总体部局:执行机构主要有旋转工件卡盘和带钻头的移动刀架两部分,两个运动在工作过程中要保持相当精度的协调。
因此,在执行机构的设计过程中分为,进刀机构设计、卡盘旋转机构和减速机构设计。
而进刀机构设计归结到底主要是圆柱凸轮廓线的设计,卡盘的设计主要是间歇机构的选择。
在执行过程中由于要满足相应的运动速度,因此首先应该对于原动机的输出进行减速。
下面先讨论减速机构传动比的确定:由于从刀具顶端离开工件表面65mm位置,快速移动送进了60mm后,在匀速送进60mm(5mm 刀具切入量,45mm工件孔深,10mm刀具切出量),然后快速返回。
要求效率是60件/小时,刀架一个来回(生产1个工件)的时间应该是1分钟。
根据这个运动规律,可以计算出电机和工作凸轮之间的传动比为1440/1。
两种方案的传动比计算,参考主要零部件设计计算。
下面讨论执行机构的运动协调问题:有运动循环图可知,装上工件之后,进刀机构完成快进、加工、退刀工作,退后卡盘必须旋转到下一个工作位置,且在加工和退刀的前半个过程中卡盘必须固定不动,由于卡盘的工作位置为四个,还要满足间歇和固定两个工作,于是选择单销四槽轮机构(或棘轮机构、不完全齿轮机构与定位销协调)解决协调问题,具体实现步骤参考“回转工作台设计”。
由于进刀机构的运动比较复杂,因此要满足工作的几个状态,用凸轮廓线设计的办法比较容易满足。
廓线的设计参考主要零部件设计计算。
机械原理课程设计说明书机械传动系统设计1、涡轮蜗杆减速器:采用如图机构,通过涡轮蜗杆加上一个定轴轮系实现了:2、外啮合行星齿轮减速器:采用如图采用渐开线直齿圆柱齿轮啮合传动,实现传动比:min/1r min /1440r n =主轴电机nmin/1r min /1440r n =主轴电机n 外啮合行星轮系减速机构涡轮蜗杆减速机构12345678主要零部件的设计计算一、减速机构设计:方案一:涡轮蜗杆减速机构结构图如下:涡轮蜗杆减速机构1、蜗杆:m=5mm d=40mm(机械原理,p346,表10-7)2、涡轮:(d=mz) m=5mm z2=20 d2=100mm z4=36 d4=180mm3、齿轮:此齿轮机构的中心距a=135mm,模数m=5mm ,采用标准直齿圆柱齿轮传动,z 5=18,z 6=36,ha*=1.0,(d=mz,d 5=90mm,d 6=180mm)4、传动比计算: 1440183613612056341216=⨯⨯=••=i i i i 方案二:外啮合行星齿轮减速器: 结构图如下:12345678图示z 1=10, z 2=36, z 3=18, z 4=21, z 5=20, z 6=17, z 7=14, z 8=40 传动比计算:i 18=i 12i H6i 78 其中i 12= -z 2 /z 1=-36/10i H6=1/i 6H182017211113564636⨯⨯-=-=-=z z z z i i HH外啮合行星轮系减速机构所以 336017211820182011636=⨯-⨯⨯=-=HH i i又i 78=-z 8/z 7=-40/12 所以14401240336010367861218=-••-=••=i i i i H二、圆柱凸轮进刀机构设计:1、运动规律:刀具运动规律:刀具快速进给60mm ,匀速进给60mm (刀具切入量5mm,工件孔深45mm,刀具余量10mm ),快速退刀。
因为刀具匀速进给的速度为2mm/s ,由此可得匀速进给的时间为30s ,设快速进给的时间为x ,快速退刀的时间为y ,又因为其回程和工作的速比系数K=2,所以可得下列方程:30+x=2y (1) 30+x+y=60 (2)(1)(2)两个方程联立可以得出,x=10s , y=20s 因此可以得出如下图所示的刀架运动规律图:60° 240°2、凸轮廓线设计:进刀机构的运动有凸轮的廓线来实现,进刀的方向为安装凸轮的轴的轴线方向,根据运动的特性,凸轮选择圆柱凸轮,按照运动规律设计其刀架运动规律图廓线如下:三、 回转工作台机构设计:回转工作台的运动规律:四个工作位置,每个工作位置之间相差90°,在工作过程中,旋转90°,停止定位,进刀加工,快速退刀后,旋转90°,进行下一个循环。
在加工和退刀的前半段(即刀具与工件有接触)时,必须将工作台固定,由于卡盘的工作位置为四个,还要满足间歇和固定两个工作,1、采用棘轮机构,其结构图如下图所示:机构采用曲柄摇杆机构来作为主动件,有运动循坏图中可知:3604.3076036011-+<+k 于是得:K>2.2所以极位夹角大于等于67.5°因此满足停留时间的于转动时间之间的比例关系,要求棘轮每次旋转90°,因此摇杆的摆角也为90°。
进刀圆柱凸轮廓线2、采用不完全齿轮机构,其结构如下图所示:不完全齿轮机构不完全齿轮的设计也是为了满足间歇运动,不完全齿轮上有1/4上有齿,因此在啮合过程中,有齿的1/4带动完全齿轮旋转90°,之后的270°由于没有齿啮合,完全齿轮不转动,该机构结构简单,在低速(1r/min)的转动中可与忽略齿轮啮合时的冲击影响。
故也能实现运动规律。
四、圆柱凸轮定位销机构设计:由机构运动循环图可以看出,定位销一共有两个工作位置,刀具在与工件接触前必须将主轴固定住,刀具离开工件后到再次接触前(即卡盘旋转时)定位销必须拔出。
由于本机床中采用了槽轮机构,该机构有固定功能,定位销的主要作用是辅助定位,起保险作用!其结构图如下图所示辅助凸轮廓线执行机构和传动部件的机构设计一、方案设计根据该机床包含两个执行机构,即主轴箱移动机构和回转台的回转机构。
主轴箱移动机构的主动件是圆柱凸轮,从动件是刀架,行程中有匀速运动段(称工作段),并具有急回特性。
要满足这些要求,需要将几个基本机构恰当地组合在一起来满足上述要求。
实现上述要求的机构组合方案可以有许多种。
1、减速机构的方案有:⑴、涡轮蜗杆减速机构⑵、外啮合行星轮系减速机构⑶、定轴轮系减速机构2、刀架规律性运动的方案有:⑴、圆柱凸轮实现刀架规律性移动:⑵、盘型凸轮—尺条实现刀架规律性移动3、回转工作台回转机构方案:⑴、单销四槽槽轮机构⑵、棘轮机构⑶、不完全齿轮机构4、定位销方案:采用圆柱凸轮机构实现二、方案比较㈠、减速机构1、涡轮蜗杆减速器方案分析:此方案采用最普通的右旋阿基米德蜗杆。
采用蜗杆传动的主要原因有:⑴、传动平稳,振动、冲击和噪声均较小;⑵、能以单级传动获得较大的传动比,故结构比较紧凑;⑶、机构返行程具有自锁性;本方案通过较为简单的涡轮蜗杆机构实现了:min /1r min /1440r n =主轴电机n的大传动比。
满足了机构要求的性能指标,而且结构紧凑,节约空间。
本方案存在的不足:由于涡轮蜗杆啮合齿间的相对滑动速度较大,使得摩擦损耗较大,因此传动效率较低,易出现发热和温升过高的现象。
磨损也较严重。
解决的办法是可以采用耐磨的材料(如锡青铜)来制造涡轮,但成本较高。
2、外啮合行星齿轮减速器方案分析:该方案采用渐开线直齿圆柱齿轮啮合传动,所选轮系为外啮合行星齿轮系,采用齿轮机构的原因是其在各种机构中的运用比较广泛,且制造过程简单,成本较低,并且具有功率范围大,传动效率高,传动比精确,使用寿命长,工作安全可靠等特点。
方案中齿轮系为复合轮系,实现了:min /1r min /1440r n =主轴电机n的大传动比。
且具有较高的传动效率。
本方案中存在的不足是,齿轮机构结构不够紧凑,占用空间较大。
㈡、刀架规律性运动机构圆柱凸轮实现刀架规律性移动:该方案采用圆柱凸轮机构和连杆机构串联组成,采用凸轮机构,是因为该机构只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑,但其不足在于凸轮廓线与推杆之间为点,线接触,易磨损。
㈢、回转工作台回转机构1、棘轮机构该方案采用棘轮机构,是因为该机构的结构简单,制造方便,运动可靠,而且棘轮轴每次转过的角度可以在较大的范围内调节,与曲柄摇杆机构配合使用使其具有急回特性。
本方案中的不足在于棘轮机构在工作时有较大的冲击和噪音,而且运动精度较差,常用于速度较低和载荷不大的场合。
此机床中属于低速旋转,冲击可以忽略,对于精度要求不是太高,因此该机构能够满足要求。
2、不完全齿轮机构:该方案采用不完全齿轮啮合实现间歇运动,此机构结构简单,加工安装容易实现,由于其中含标准件,有很好的互换性,有精确的传动比,所以在工作过程中精度较高。
此机构的不足是由于在进入啮合时有冲击,会产生噪声,齿轮在磨损过程中会对精度有一定影响。
但是对于低速旋转机构,此机构能够满足使用要求。
㈣、圆柱凸轮定位销机构该方案采用圆柱凸轮机构和连杆机构串联组成,采用凸轮机构,是因为该机构只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑。
本方案中主要存在的不足在于凸轮廓线与推杆之间为点,线接触,易磨损。
最终设计方案和机构简介一、方案选择:经过方案分析与比较,该机构最终选择如下方案组合:1、电机选择Y132S-4型异步电动机。
该电动机额定功率P=5.5KW,满载转速n=1440r/min。
扭矩和功率均能满足工作要求。
2、传动、减速机构采用蜗轮蜗杆减速机构。
蜗轮蜗杆的最大优点就是能实现大传动比,结构紧凑,占用空间较小,传动平稳,振动、冲击和噪声均较小,并且反行程能自锁。
使用该机构对于机床的支撑外型和外观造型设计有很大优势。