PixHawk下载与编译Bootloader文件
WIZ200WEB 用户手册说明书
Document History InformationRevision Data DescriptionVer. 1.0 2008. 12. Release with WIZ200WEB launching23WIZnet’s Online Technical SupportIf you have any questions or want more information about WIZnet products, submit your question to the Q&A Board on the WIZnet website.(www.wiznet.co.kr) A WIZnet engineer will have an answer for you as soon as possible.4Table of Contents1. Introduction ......................................................................................................................................... 7 1.1. Main Function .........................................................................................................................................................7 1.2. Specification ............................................................................................................................................................8 1.3.Contents (WIZ200WEB-EVB) (8)2. Block Diagram ..................................................................................................................................... 93. WIZ200WEB Base Board .................................................................................................................. 114. Getting Started .................................................................................................................................. 16 4.1.Configuration Tool (16)4.1.1. Basic Configuration .................................................................................................................................. 16 4.1.2. Firmware Upload ....................................................................................................................................... 17 4.1.3. Webpage Upload ...................................................................................................................................... 19 4.1.4. Use of Rom File Maker rev3.0 .. (20)4.2.Operation Test (22)4.2.1. Hardware Interface ................................................................................................................................... 22 4.2.2.Testing the Function of Web Server (23)5. Programmer’s Guide ........................................................................................................................ 26 5.1. Memory Map ....................................................................................................................................................... 26 5.2. WIZ200WEB Firmware ................................................................................................................................... 26 5.3. Compile .................................................................................................................................................................. 28 5.4.Downloading (28)6. WIZ200WEB Hardware Specification ............................................................................................ 31 6.1. Parameters ............................................................................................................................................................ 31 6.2. Specification ......................................................................................................................................................... 31 6.3.Board Dimensions and Pin Assignment (31)6.3.1. Pin Assignment .......................................................................................................................................... 31 6.3.2. Size .................................................................................................................................................................. 32 6.3.3.Connector Specification (33)7. Warranty (35)5TablesTable 1. WIZ200WEB Specification .................................................................................................................8 Table 2. Contents of WIZ200WEB ...................................................................................................................9 Table 3. WIZ200WEB PIN MAP ..................................................................................................................... 12 Table 4. Expansion Connector ....................................................................................................................... 15 Table 5. WIZ200WEB Testing Environment .............................................................................................. 22 Table 6. WIZ200WEB Main Source .............................................................................................................. 27 Table 7. WIZ200WEB PINMAP .. (31)6FiguresFigure 1. Block Diagram .................................................................................................................................. 10 Figure 2. WIZ200WEB Base Board Layout ............................................................................................... 11 Figure 3. AVR JTAG Connector...................................................................................................................... 12 Figure 4. AVR ISP Connector ......................................................................................................................... 12 Figure 5. WIZ200WEB PIN MAP ................................................................................................................... 12 Figure 6. WIZ200WEB LED .............................................................................................................................. 13 Figure 7. WIZ200WEB Switch ........................................................................................................................ 13 Figure 8. WIZ200WEB 16x2 LCD .................................................................................................................. 14 Figure 9. WIZ200WEB VR ................................................................................................................................ 14 Figure 10. WIZ200WEB T emperature Sensor .......................................................................................... 15 Figure 11. Configuration T ool ....................................................................................................................... 16 Figure 12. Board Search Window ................................................................................................................ 18 Figure 13. Open dialog box for uploading ............................................................................................. 19 Figure 14. Firmware uploading window ................................................................................................... 19 Figure 15. Complete Uploading ................................................................................................................... 19 Figure 16. Flash Rom Image File .................................................................................................................. 20 Figure 17. ROM File Maker ............................................................................................................................ 21 Figure 18. ROM Image File Make ................................................................................................................ 21 Figure 19. WIZ200WEB External Interface ................................................................................................ 22 Figure 20. WIZ200WEB index page ............................................................................................................ 23 Figure 21. WIZ200WEB Digital Output Page .......................................................................................... 24 Figure 22. WIZ200WEB Digital Input Page .............................................................................................. 24 Figure 23. WIZ200WEB Analog Input Page ............................................................................................. 25 Figure 24. WIZ200WEB Memory Map ....................................................................................................... 26 Figure 25. AVR Studio ...................................................................................................................................... 28 Figure 26. ATmega128 ISP .............................................................................................................................. 29 Figure 27. WIZ200WEB Boot Loader Program ....................................................................................... 30 Figure 28. WIZ200WEB Pin Map .................................................................................................................. 31 Figure 29. WIZ200WEB Module Dimension ............................................................................................ 32 Figure 30. WIZ200WEB Base Board Size................................................................................................... 33 Figure 31. RJ-45 PIN Assignment ................................................................................................................ 33 Figure 32. RJ-45 PIN Assignment ................................................................................................................ 34 Figure 34. RS-232 PIN Assignment . (34)71. IntroductionWIZ200WEB provides the tiny embedded web server operating on low-speed MCU. It controls digital output or monitors digital and analogue input through web browser. The webpage is stored in the serial flash memory of the board, and can be updated through network.1.1. Main FunctionOperates as HTTP ServerGuarantee system stability and reliability by using W5300, the hardwired chip Provides Configuration Tool Program for easy control and confiuration Supports 10/100 Mbps Ethernet RoHS Compliant81.2. SpecificationITEMDescriptionMCUATmega128(having internal 128K Flash, 4K SRAM, 4K EEPROM, external 32K SRAM, 512K Serial Flash)ProtocolsTCP/IP - W5300 (Ethernet MAC & PHY Embedded)UDP – Configuration HTTP Server DHCPNetwork Interface 10/100 Mbps Auto-sensing, RJ-45 Connector Input Voltage DC 5V Power ConsumptionUnder 180mATemperature 0°C ~ 80°C (Operation), -40°C ~ 85°C (Storage) Humidity10 ~ 90%Table 1. WIZ200WEB Specification1.3. Contents (WIZ200WEB-EVB)WIZ200WEB ModuleWIZ200WEB Base Board9CD (Configuration Tool Program, Firmware, Manual areincluded)LAN Cable5V Power AdaptorTable 2. Contents of WIZ200WEB☞ If any missing item is found, contact to the shop you purchased.2. Block Diagram10Figure 1. Block DiagramThe main MCU of WIZ200WEB is 8 bit AVR (ATmega128). The Ethernet is processed by W5300, the hardwired TCP/IP chip. When connected to the IP address of the board at the web browser, the webpage in the serial flash memory is transmitted and displayed. Each webpage enables controlof digital input & output, analogue input and network configuration on the web.3. WIZ200WEB Base BoardWIZ200WEB module can be tested by using base board.11Figure 2. WIZ200WEB Base Board Layout①PowerThe power can be controlled by using power switch after connecting the DC 5V (500mA)adaptor.②ATmega128 JTAG ConnectorFigure 3. AVR JTAG Connector12③ATmega128 ISP ConnectorFigure 4. AVR ISP Connector④WIZ200WEB Module ConnectorThe connector has below pin map.Figure 5. WIZ200WEB PIN MAPJ3 J23.3V 3.3V ADC0/PF0 ADC1/PF1GND GND ADC2/PF2 ADC3/PF3SCL/INT0/PD0 SDA/INT0/PD1 ADC4/PF4 ADC5/PF5RXD1/INT2/PD2 TXD1/INT3/PD3ADC6/PF6 ADC7/PF7ICP1/PD4 XCK1/PD5 AREF PB4T1/PD6 T2/PD7 PB5 PB6SS/PB0 SCK/PB1 PB7 PE7MOSI/PB2 MISO/PB3 PE5 PE6RXD0/PE0 TXD0/PE1 PE3 PE4GND GND /RESET PE2Table 3. WIZ200WEB PIN MAP13⑤ Serial Connector(UART0)The debugging information is transmitted through Serial connector when proceeding development.⑥ Serial Connector(UART1)The debugging information is transmitted through Serial connector when proceeding development. ⑦ LED4 LEDs are installed in the WebServer Base Board, and connected to PORTB.4~7. .Figure 6. WIZ200WEB Base Board LED⑧ System Reset Switch⑨ SwitchSwitch is connected to PORTE.5~6. It is the slide switch.Figure 7. WIZ200WEB Base Board Switch⑩ 16X2 character LCD16x2 LCD is controlled with the method of 4 bit control It is connected to PORTD andPORTE.14Figure 8. WIZ200WEB Base Board 16x2 LCD⑪Variable ResistorIn order to test the analog data easily, you can use variable resistor and get the input valueof analog variable. Variable resistor is connected to ADC0 channel.Figure 9. WIZ200WEB Base Board VR⑫Digital Temperature SensorMicrochip’s TC77 having 12bit resolutions is used for temperature sensor. Temperaturesensor can be controlled by SPI and selected through PB0.Figure 10. WIZ200WEB Base Board Temperature Sensor15⑬Extension ConnectorIt is the connector (J12) to extend to GPIO and the function pins of ATmega128NO FUNCTION NO FUNCTION1 NC2 5V3 NC4 GND5 SCL/INT0/PD06 ADC0/PF07 SDA/INT0/PD1 8 ADC1/PF19 RXD1/INT2/PD2 10 ADC2/PF211 TXD1/INT3/PD3 12 ADC3/PF313 ICP1/PD4 14 ADC4/PF415 XCK1/PD5 16 ADC5/PF517 T1/PD6 18 ADC6/PF619 T2/PD7 20 ADC7/PF721 SS/PB0 22 AREF23 SCK/PB1 24 PE725 MOSI/PB2 26 PB627 MISO/PB3 28 PE529 PB4 30 PE431 PB5 32 PE333 PB6 34 PE235 PB7 36 /RESET37 PE1/TXD0 38 NC39 PE0/RXD0 40 NCTable 4. Expansion Connector4. Getting Started4.1.Configuration Tool4.1.1.Basic Configuration16Figure 11. Configuration T oolⓐVersion : It displays Firmware version.ⓑ Board List : If “Search” button is clicked, all MAC address of WIZ200WEB modules are displayed in the Board List.ⓒLocal IP/Port : IP Address of WIZ200WEBⓓSubnet : Subnet Mask of WIZ200WEBⓔGateway : Gateway Address of WIZ200WEBⓕ Web Page Upload : It is possible to upload ROM Image file to the internal flash memory ofWIZ200WEB. For the detail, refer to “4.1.3. Webpage Upload”.ⓖEnable DHCP Mode : It is the option for DHCP mode. Select a MAC Address to be used for17‘Enable DHCP mode’ at the ‘board list’. If you click “Setting” button, the board acquires IP and Subnet Mask by using DHCP . (By acquiring IP address from DHCP server, it can take some time) After acquiring network information from DHCP , re-booting is processed. If you click “Search” button again, you can check changed values. If you click MAC Address on the ‘Board list’, IP Address, Subnet Mask and Gateway information are displayed. If network information is not acquired due to any problem, IP , Subnet and Gateway Address are initialized to 0.0.0.0.ⓗ Search : “Search” function is used for searching module on the same LAN. If all the modules on the same subnet are searched by using UDP broadcast, their MAC addresses are displayed on the “Board List”.ⓘ SettingThis function is used for changing the configuration values of WIZ200WEB. After changing any configuration value, “Setting” button should be clicked for applying the value. With this, the values can be saved in the EEPROM and maintained even after shutting down the power of module. The process is as below.① Select a MAC address at the “Board list”. The configuration values of selected module aredisplayed in each field. ② Change the value of each field.③ If you click “Setting” button, the configuration is completed.④ The module is initialized with the changed configuration. (automatically re-booted) ⑤ In order to check changed value, search the module with “Search” button.ⓙ UploadFirmware is uploaded through network.Firmware upload process is described in detail at the “4.1.2 Firmware Upload” ☞ The initialization takes about 20~30 seconds after uploading the firmware.ⓚ Exit : It closes Configuration tool program.4.1.2. Firmware Upload① Execute Configuration Tool program and click ‘Search’ button.② If the module is correctly connected to the network, its MAC address is displayed on the ‘Board list’.18Figure 12. Board Search Window③Select a module at the ‘Board list’ and click ‘Upload’ button.☞ Before uploading through Ethernet, the network information should be set for correct network communication. By using PING test, it is possible to check if the value is appropriate for network communication.④As below dialog box is shown, select the Binary file and click ‘OPEN’ button.19Figure 13. Open dialog box for uploading☞ Be sure to use the firmware only for WIZ200WEB.⑤You can see below status window showing ‘Processing’.Figure 14. Firmware uploading window⑥If the file is uploaded, ‘Complete Uploading’ message is displayed.Figure 15. Complete Uploading4.1.3.Webpage Upload①Execute Configuration Tool program and click ‘Search’ button.②If the module is correctly connected to the network, its MAC address is displayed on the20‘Board list’.③ Select the board at the ‘Board list’ and click ‘web page Upload’ button.☞ Before uploading through Ethernet, the network information should be set for correct network communication. By using PING test, it is possible to check if the value is appropriate for network communication.④ As below dialog box shows, select the Flash Rom File System (*.rom) file and click ‘OPEN’ button.Figure 16. Flash Rom Image File☞ The Flash Rom File System should be created by using “Rom File Maker Tool rev3.0”. For the detail, refer to “4.1.4. Use of Rom File Maker rev3.0”⑤ If the file is uploaded, ‘Complete Uploading’ message is displayed.4.1.4. Use of Rom File Maker rev3.0Rom File Maker rev3.0 is the tool for creating ROM Image which enables the webpage to be stored in the Flash memory.Select the webpage by using ‘Add Files’ button.☞ There is limitation of file number in selecting at a time. (Normally, max 15 files can be selected simultaneously). If there are more files, use “Add Files” button for the several times.21Figure 17. ROM File MakerSelect ‘Rom Image File’ option. If you click ‘Make Image’ button, ‘*.rom’ file can be created.Figure 18. ROM Image File Make224.2. Operation TestIn this chapter, we will show how WIZ200WEB operates through a sample testing. The hardware and software requirements for testing are as below.PCWIZ200WEBHardware1) LAN Port1) WIZ200WEB Board 2) LAN Cable3) DC5V Power AdaptorSoftware1) Configuration Tool Program 2) Web BrowserTable 5. WIZ200WEB Testing Environment4.2.1. Hardware InterfaceFigure 19. WIZ200WEB External InterfaceHardware installation process is as below.STEP 1: By using RJ45 Ethernet cable, connect the board to the network.Serial CableLAN CablePower23STEP 2: Connect 5V DC adaptor to WIZ200WEB board.4.2.2. Testing the Function of Web ServerSTEP1: Supply the power to WIZ200WEB board.STEP2: Configure the board by using Configuration Tool.STEP3: Execute the web browser and input the IP address of the WIZ200WEB to access the webpage.STEP4: If connection is appropriately processed, ‘index.html’ page is displayed on the web browser.Figure 20. WIZ200WEB index pageSTEP5: Click ‘Digital Ouput’ menu at the web browser, and control the LED and LCD installed on the WIZ200WEB Base Board.24Figure 21. WIZ200WEB Digital Output PageSTEP6: Click ‘Digital Input’ menu, and check the status of switch installed on the WIZ200WEB Base Board. Switch status is updated every one second.Figure 22. WIZ200WEB Digital Input PageSTEP7: Click ‘Analog Input’ menu and check the voltage level according to Variable Resistor(VR) which is installed on the WIZ200WEB Base Board. The VR is updated every second.25Figure 23. WIZ200WEB Analog Input PageSTEP8: Click “ T emperature Read” menu and check current temperature by using the temperature sensor, TC77 installed on the WIZ200WEB Base Board.265. Programmer’s Guide5.1. Memory MapThe memory map of WIZ200WEB is composed of 128Kbyte code memory and 64Kbyte data memory. The data memory is composed of internal SRAM and W5300. In addition, 4Kbyte EEPROM is built in AVR. Environment variables of the board are saved in this EEPROM.Below figure shows the system memory map of the test board.Figure 24. WIZ200WEB Memory Map5.2. WIZ200WEB FirmwareThe firmware performs ProcessWebServer, ProcessDhcp and ProcessConfig in the main() Function ProcessWebServer() operates as webserver. It processes HTTP protocol from web browser, reads the web page in the Flash memory, and sends it. ProcessConfig() function processes network related configuration. ProcessDhcp() function does DHCP related functions.ITEM(Folder name) FileFunctionmainmain.c WIZ200WEB F/W main() config_task.c Net Configuration Task dhcp_task.cDHCP Client Management27iinchipiinchip_conf.h System Dependant Definition of W5300 w5300.c w5300 I/O Function socket.cw5300 Socket APIinet dhcp.c Processing DHCP Client Protocol httpd.c Processing HTTP Protocolmcu delay.c Processing the delay of ATmega128 serial.c UART related Functiontimer.c Timer interrupt Process Function types.h AVR Data Type & Global Definition util sockutil.cSocket related Utility Function util.cUtility Functionevbconfig.c Function to configure network related information dataflash.c Function to process Serial Flashevb.c Function to control devices on the board such as LED, Switch & LCDlcd.c Function to process LCD spi.c Function to process SPIromfile.cFunction to process ROM File SystemTable 6. WIZ200WEB Main Source285.3. CompileThe sources mentioned in the Chapter 5.2, are compiled by aligning in the SRC. The firmware compile can be performed by using WINAVR and AVRSTUDIO.Install the WINAVR and AVRSTUDIO in the PC. For the easy working, open the firmware project file "~/main/ex03_webserver/wiz-web.aps” through AVRSTUDIO project file.Check compile setting of Configuration option of ‘Project’ menu. For the setting method, refer to ‘AVR Studio User Guide’.The firmware provided by WIZnet is based on AVR-GCC 3.4.6. In another version, the operation can be abnormal.Figure 25. AVR StudioWhen compile is completed, hex file is created in the folder that user defined before. This file is programmed to ATmega128.5.4. DownloadingFor the Hex file downloading, use AVR Studio and AVR ISP cable.1)Connect the AVRISP cable to J9 of the Base Board.2)Connect the power adaptor and turn on the switch.3)Execute AVRStudio.exe4)Select Atmega128 at the Device section5)Select HEX file at the FLASH section6)Click Program button.For more detail, refer to ‘AVR Tool Guide.pdf’.29Figure 26. ATmega128 ISPIn order to update the firmware through network, the bootloader should be programmed first. Bootloader is written to be input at 0x1E000. For the re-programming the firmware file, removethe Atmega128 and program the ‘Boot.hex’ file. At this time, do not check the option of “Erase Device Before Programming” for not removing the bootloader.30 Figure 27. WIZ200WEB Boot Loader Program316. WIZ200WEB Hardware Specification 6.1. ParametersPower 5V DC, 3.3VDimension 60 x 42 x 14 (L x W x H) Temperature Operating : 0 ~ 80 ℃Ethernet 10/100 Base-T Ethernet (Auto detection)6.2. SpecificationMCUATmega128FLASH 128KByte (MCU Internal) + 512Kbyte(External Serial Flash) SRAM 4KByte (MCU Internal) + 32Kbyte (External) EEPROM4KByte (MCU Internal)6.3. Board Dimensions and Pin Assignment6.3.1. Pin AssignmentFigure 28. WIZ200WEB Pin MapJ3J23.3V 3.3V ADC0/PF0 ADC1/PF1 GNDGNDADC2/PF2 ADC3/PF3 SCL/INT0/PD0SDA/INT0/PD1ADC4/PF4 ADC5/PF5 RXD1/INT2/PD2 TXD1/INT3/PD3ADC6/PF6 ADC7/PF7 ICP1/PD4 XCK1/PD5 AREF PB4 T1/PD6 T2/PD7 PB5 PB6 SS/PB0 SCK/PB1 PB7 PE7 MOSI/PB2 MISO/PB3 PE5 PE6 RXD0/PE0 TXD0/PE1 PE3 PE4 GNDGND/RESETPE2Table 7. WIZ200WEB PINMAP6.3.2.Size32 Figure 29. WIZ200WEB Module Dimension33Figure 30. WIZ200WEB Base Board Size6.3.3.Connector SpecificationRJ45 : Ethernet Port PinoutsFigure 31. RJ-45 PIN Assignment34Pin Signal1 TX+2 TX-3 RX+6 RX-Figure 32. RJ-45 PIN AssignmentRS-232Pin Number Signal Description1 NC Not Connected2 RxD Receive Data3 TxD Transmit Data4 NC Not Connected5 GND Ground6 NC Not Connected7 NC Not Connected8 NC Not Connected9 NC Not ConnectedFigure 33. RS-232 PIN Assignment357. WarrantyWIZnet Co., Ltd offers the following limited warranties applicable only to the original purchaser. This offer is non-transferable.WIZnet warrants our products and its parts against defects in materials and workmanship under normal use for period of standard ONE(1) YEAR for the WIZ200WEB board and labor warranty after the date of original retail purchase. During this period, WIZnet will repair or replace a defective products or part free of charge.Warranty Conditions:The warranty applies only to products distributed by WIZnet or our official distributors.1. The warranty applies only to defects in material or workmanship as mentioned above in 7.Warranty.2. The warranty applies only to defects which occur during normal use and does not extendto damage to products or parts which results from alternation, repair, modification, faulty installation or service by anyone other than someone authorized by WIZnet Inc. ; damage to products or parts caused by accident, abuse, or misuse, poor maintenance, mishandling, misapplication, or used in violation of instructions furnished by us ; damage occurring in shipment or any damage caused by an act of God, such as lightening or line surge.Procedure for Obtaining Warranty Service1. Contact an authorized distributors or dealer of WIZnet Inc. for obtaining an RMA (ReturnMerchandise Authorization) request form within the applicable warranty period.2. Send the products to the distributors or dealers together with the completed RMArequest form. All products returned for warranty must be carefully repackaged in the original packing materials.3. Any service issue, please contact to ***************.kr。
海康威视网络摄像机操作手册 V5.0.3

注意事项提醒用户防范 潜在的伤害或财产 损失危险。
警告: 请使用满足 SELV(安全特低电压)要求的电源,并按照 IEC60950_1 符合 Limited Power Source(受限电源)的额定电压为 5V/12V 直流或 24V 交流电源供电(供电电源的要求详见说明书) 。 如果设备工作不正常,请联系经销商或最近的服务中心,不要以任何方式拆卸或修改设备(未经许可的修改或维修所导 致的问题,责任自负) 。 为减少火灾或电击危险,请勿让本产品受到雨淋或受潮。 本安装应该由专业的服务人员进行,并符合当地法规规定。 应该在建筑物安装配线中组入易于使用的断电设备。 有关在天花板上安装设备的指示:安装后,请确保该连接至少可承受向下 50 牛顿(N)的拉力。
杭州海康威视数字技术股份有限公司|版权所有(C)
3 网络摄像机 . 操作手册
目录
1 网络连接 ............................................................................................................................................................. 4 1.1 有线网络 ................................................................................................................................................. 4 1.2 无线网络 .....................................................................
PIXHACK硬件资料及使用教程

PIXHACK 中文入门指南PIXHACK是根据PIXHAWK硬件架构平台上由CUAV设计,并有CUAV生产的一款32位开源硬件飞控,由于硬件主要架构跟pix完全相同,所以完全兼容3DR APM固件以及pix原生固件。
PIXHACK在pix原版基础上优化了供电芯片,删减不必要接口,接口做调整优化,改为前后方插线。
主要的亮点是IMU分离设计,内置小型通用减震结构,并采用了CNC一体铣成型工艺,抗干扰性还是稳定性都有质的提升。
Pixhack经过Cuav长达一年的设计,无数个版本的优化及测试,已经达到了比较稳定理想的效果:硬件参数介绍硬件参数介绍:处理器 1. 32位2M闪存STM32F427 Cortex M4,带硬件浮点处理单元主频:168MHZ,256K RAM2. 32位STM32F103备份协处理器内置传感器Pixhack 采用IMU分离设计,内置通用性减震,一般飞行器不需要做减震处理(如果震动太大及频率过高还需减震)1.L3GD20 3轴数字16位陀螺仪2.LSM303D 3轴14位 加速度/磁强计3.MPU6000 6轴加速度计/磁强计4. MS5611 高精度气压计工作环境及电压温度范围:-5~50度PM传感器工作电压2-6SPM传感器输出电压5.4V 3APWM OUT输入供电电压最高9V(支持高压舵机,而原版Pixhawk不支持高于5.5V的供电)2路电源自动冗余(PM口和PWM OUT口),PM口优先供电,出现故障自动切换到PWM OUT口供电外观尺寸主控尺寸68mmX44mmX15MM 重量:68g数据接口1. 5个UART 1个兼容高电压,2个带有硬件流控制2. 1个CAN3. Spektrum DSM/DSM2/DSM-X卫星接收机兼容输入4. Futaba SBUS兼容输入和输出5. PPM信号输入6. RSSI(PWM或者电压)输入7. I2C协议设备扩展8. 预留SPI接口9. 3.3和6.6VADC输入10. 外部MICRO USB接口11. 13个PWM/舵机输出12. 多音蜂鸣器及解锁按键 状态led 接口外围设备支持固定翼多旋翼直升机车船固件支持支持接收机类型接收机类型S-Bus, DSM2,PPM 。
Bootloader编译与下载

Bootloader编译与下载Bootloader编译与下载3.1 实验目的:完成Bootloader编译与下载。
3.2 实验内容:参照指导书给出的步骤,一步一步地完成Bootloader编译与下载。
3.3 实验设备:1)硬件环境(硬件连接方法与Android版本一样)设备硬件连接方法必用的设备:串口线一根,网线一根,USB OTG线缆一根。
UART port0 : 作为监测中使用的端口连接串行线。
Ethernet port : 利用 Ethernet,为了高速传送,连接 LAN 线缆。
USB OTG Cable : 利用 USB,为了更新映像时使用,进行连接。
引导模式开关位于试验箱的右下角在下载映像文件之前注意设置引导模式开关设定引导模式NAND Flash 引导模式IROM 引导模式2)软件环境Linux 开发环境- VMWare在XP系统安装虚拟机,通过虚拟机加载一个Linux系统开发环境- Linux内核(CD提供ubuntu 8.04版本)串口监测工具 : minicom开发工具 : 交叉编译器 (CD提供gcc 4.4.1)3.4 实验步骤:操作步骤:提供CD 中“ubuntu_8.04”目录复制到“D:\”目录中。
在这个目录中,双击“ubuntu8.04_android.vmx”文件,运行ubuntu 8.04。
运行Ubuntu 8.04 映像前,需要安装VMware Player 或者WMware Workstation。
出版 CD 中提供了 VMware Player (路径 : tools\vmware-player\VMware-player-3.1.2-301548.exe)。
如果双击“ubuntu8.04_android.vmx”文件,如错误!未找到引用源。
],运行已安装的VMware Player 或者VMware Workstation。
这时,按下 Power On this virtual machine按钮。
PixHawk飞控板烧写BootLoader流程

新的Pixracer飞控是没有Bootloader的,没有Bootloader,就没办法通过控制台给飞控板烧写固件。
因此要先对飞控烧写Bootloader。
本文主要介绍通过JLINK及配套的Flash ISP 软件进行Bootloader烧写的步骤。
1、下载并构建Bootloader。
我是在ubuntu虚拟机上操作的,Windos下没试过。
刚下载下来的问价夹内容如下图所示。
编译过后文件夹如下所示,可以看到增加了很多文件夹,这些文件夹即Bootloader 所在子文件夹:找到飞控对应的文件夹,我用的是px4fmu-v4,故打开biuld_px4fmuv4-bl文件夹,该路径下的px4fmuv4_bl.bin文件即为Bootloader。
2、连接仿真器国内卖JLINK的厂商基本上都是抄人家的,所以自己在使用JLINK时也要以实测为准。
我手上两个JLINK就截然不同。
下图左边的JLINK,第19脚说是5v输出,实测是0。
对于右边的JLINK的,1脚的VTref居然会输出V3.3,所以目标板可以直接以这个为电源来调试。
对于左边的JLINK,目标板必须要提供电源给JLINK的1脚。
且目标板需单独供电。
J-Link接口如下所示,注意缺口方向。
由于本人采用SWD模式下载。
故按照有图所示连接方式。
1,、7、9、20分别连接PIXRACER中控的FMU_VDD_3V3、FMU_SWDIO、FMU_SWCLK、GND等引脚。
3、下载并安装Jlink驱动及Flash ISP软件解压之后如下图所示,安装V486b即可。
下载之后安装即可。
4、烧写Bootloader打开Flash ISP软件开始-->所有程序-->SEGGER-->J-link ARM v4.86b-->J-flash软件打开后出现以下对话框,选择Creat a new project->Start J-flash.J-flash界面如下图所示:点击Options->Project Options,对General、Target Interfice、CPU、Flash等进行设置。
Pixhawk飞控设置飞行模式教程及LED灯意义
飞行模式中文意思:0:Stabilize自稳,1:Acro特技,2:AltHold定高,3:Auto自动,4:Guided引导,5:Loiter留待(常叫悬停),6:RTL返航,7:Circle绕圈,9:Land降落,11:Drift飘移,13:Sport运动,14:Flip翻转,15:AutoTune自动调参,16:PosHold定点,17:Brake暂停M:Copter中有14种飞行模式可供选择,有10种是常用的。
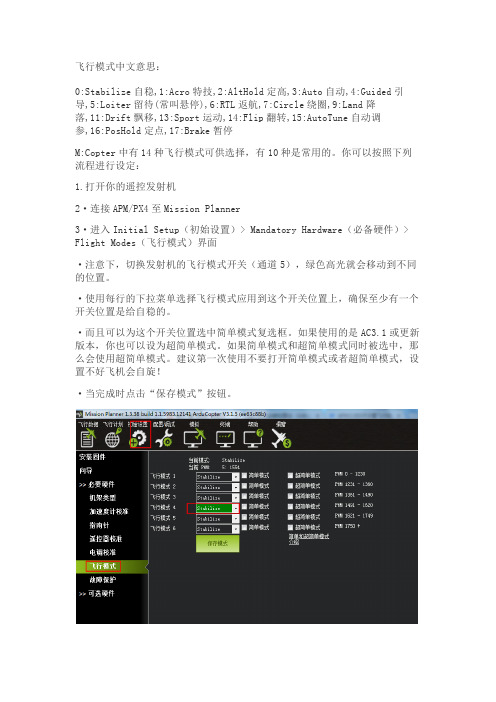
你可以按照下列流程进行设定:1.打开你的遥控发射机2·连接APM/PX4至Mission Planner3·进入Initial Setup(初始设置)> Mandatory Hardware(必备硬件)> Flight Modes(飞行模式)界面·注意下,切换发射机的飞行模式开关(通道5),绿色高光就会移动到不同的位置。
·使用每行的下拉菜单选择飞行模式应用到这个开关位置上,确保至少有一个开关位置是给自稳的。
·而且可以为这个开关位置选中简单模式复选框。
如果使用的是AC3.1或更新版本,你也可以设为超简单模式。
如果简单模式和超简单模式同时被选中,那么会使用超简单模式。
建议第一次使用不要打开简单模式或者超简单模式,设置不好飞机会自旋!·当完成时点击“保存模式”按钮。
飞行模式注解1、稳定模式Stabilize稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。
此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最佳模式。
一定要确保遥控器上的开关能很方便无误地拨到该模式,应急时会非常重要。
2、比率控制模式Acro这个是非稳定模式,这时apm将完全依托遥控器遥控的控制,新手慎用。
3、定高模式ALT_HOLD定高模式(AltHold)是使用自动油门,试图保持目前的高度的稳定模式。
Huawei DevEco Studio使用指南_鸿蒙学堂
文档内容来自鸿蒙官方网站,鸿蒙学堂 整理
Huawei DevEco Studio 使用指南
2.3 运行 Hello World.........................................................................................................11 3 工程管理......................................................................................................................................14
3.2 支持的设备模板和编程语言 ........................................................................................ 17 3.3 创建一个新的工程.........................................................................................................18
2.2 配置开发环境 ................................................................................................................... 4 2.2.1 npm 设置............................................................................................................. 4 2.2.2 设置 Gradle 代理................................................................................................ 5 2.2.3 设置 DevEco Studio 代理................................................................................ 6 2.2.4 下载 HarmonyOS SDK .................................................................................... 8
长虹说明书
长虹窗式空调使用说明书篇二:长虹白板软件使用说明书长虹白板软件使用说明书用户使用手册(v1.6.3)目录一. 系统特点 ............................................................................. ...............................................................................4二. 系统安装 ............................................................................. ...............................................................................62.1. 运行环境 ............................................................................. . (6)2.2. 系统安装 ............................................................................. . (7)三. 基础操作 ............................................................................. ...............................................................................83.1. 运行程序 ............................................................................. . (8)3.2. 基本操作 ............................................................................. . (9)3.2.1 切换模式 ............................................................................. .. (9)3.2.2 关闭白板软件 ............................................................................. (9)3.2.3 快捷功能区 ............................................................................. .. (10)3.3. 工具条操作 ............................................................................. . (11)3.4. 主要功能 ............................................................................. (12)3.4.1 书写功能 ............................................................................. (12)3.4.2 绘图功能 ............................................................................. (14)3.4.3 工具功能 ............................................................................. (20)3.4.4 背景功能 ............................................................................. (27)3.4.5 管理页面 ............................................................................. (29)3.4.6 素材 ............................................................................. ................................................................................293.4.7 资源 ............................................................................. ................................................................................323.4.8 实验 ............................................................................. ................................................................................353.4.9 题库 ............................................................................. ................................................................................383.5. 对象编辑 ............................................................................. .. (39)3.6. 页面缩放 ............................................................................. .. (42)3.7. 文件功能 ............................................................................. .. (42)3.8. 异常退出自动恢复功能 ............................................................................. (43)前言一、东方中原互动教学支撑系统的介绍东方中原互动教学支撑系统(以下简称东方中原白板软件)可以结合电子白板或液晶平板通过与电脑、投影机,组成一个交互式的协作会议或教学环境,配备的电子笔可代替鼠标和粉笔,在电子白板或液晶平板上书写、绘图、直接操控电脑。
PX4Pixhawk程序研究笔记

PX4 Pixhawk程序研究笔记编译环境建立参考链接:1、首先确保电脑安装了Java运行环境。
2、下载并安装PX4 Toolchain,链接:3、在开始菜单中选择:PX4 Toolchain -> PX4 Software download来获取一个初始软件设置。
它会在安装路径下(默认为C:\px4)下载如下文件夹:▪px4▪Firmware – PX4 firmware (for all modules), includes MAVLink▪NuttX – The NuttX Real Time Operating System (RTOS)▪libopencm3 – Optional: Open Source Cortex Mx library, used only in the bootloaders▪Bootloader – Optional: Bootloaders, does normally not need to be touched4、配置Eclipse,开始菜单 -> 所有程序–> PX4 Toolchain -> PX4 Eclipse默认的workspace路径是刚好正确的:New → Make with Existing Code:选择Cross GCC,并指定文件夹位置为:“c:\px4\Firmware”。
打开右边的“Make Target” 并点击“New Make Target”:你应当创建如下Targets:▪archives– builds the NuttX OS▪all– builds the autopilot software (depends on archives)▪distclean– cleans everything, including the NuttX build▪clean– cleans only the application (autopilot) part▪upload px4fmu-v1_default– uploads to PX4FMU v1.x boards▪upload px4fmu-v2_default– uploads to PX4FMU v2.x boards编译方法:参考链接:1、双击distclean;2、双击archives;3、双击all;4、双击upload px4fmu-v1_default(PX4)或upload px4fmu-v2_default(Pixhawk)来上传固件。
PX4源码开发人员文档(二)——Hello Sky

前提∙用UART1连接PX4FMU和计算机∙安装PX4Toolchain∙注册Github账户Step 1: 准备源码文件为了方便管理代码,可以使用GIT 版本控制系统,在GitHub上fork和更新源码。
不注册GitHub的话,可以在PX4 console中输入下面的命令:1.git clone https:///PX4/Firmware更新the git submodules,在PX4 console上输入:1.cd Firmware2.git submodule init3.git submodule update文件准本完成,编译操作系统,输入:1.make archives当submodules或者NuttX 配置改变,重新编译。
在Firmware/src/examples/ 新建目录px4_simple_app,在目录中新建文件module.mk并添加如下内容:1.MODULE_COMMAND = px4_simple_app2.SRCS = px4_simple_app.cStep 2: 最小程序在px4_simple_app目录下创建px4_simple_app.c文件。
遵循PX4 CodingStyle编辑如下代码:1./**2. * @file px4_simple_app.c3. * Minimal application example for PX4 autopilot.4. */5.6.#include <nuttx/config.h>7.#include <stdio.h>8.#include <errno.h>9.10.__EXPORT int px4_simple_app_main(int argc, char *argv[]);11.12.int px4_simple_app_main(int argc, char *argv[])13.{14. printf("Hello Sky!\n");15.return OK;16.}Step 3: 在NuttShell中注册应用并build完成了应用并可以运行,但是没有在NuttShell 命令中注册。
PixHawk飞控板烧写BootLoader流程
新的Pixracer飞控是没有Bootloader的,没有Bootloader,就没办法通过控制台给飞控板烧写固件。
因此要先对飞控烧写Bootloader。
本文主要介绍通过JLINK及配套的Flash ISP 软件进行Bootloader烧写的步骤。
1、下载并构建Bootloader。
我是在ubuntu虚拟机上操作的,Windos下没试过。
刚下载下来的问价夹内容如下图所示。
编译过后文件夹如下所示,可以看到增加了很多文件夹,这些文件夹即Bootloader 所在子文件夹:找到飞控对应的文件夹,我用的是px4fmu-v4,故打开biuld_px4fmuv4-bl文件夹,该路径下的px4fmuv4_bl.bin文件即为Bootloader。
2、连接仿真器国内卖JLINK的厂商基本上都是抄人家的,所以自己在使用JLINK时也要以实测为准。
我手上两个JLINK就截然不同。
下图左边的JLINK,第19脚说是5v输出,实测是0。
对于右边的JLINK的,1脚的VTref居然会输出V3.3,所以目标板可以直接以这个为电源来调试。
对于左边的JLINK,目标板必须要提供电源给JLINK的1脚。
且目标板需单独供电。
J-Link接口如下所示,注意缺口方向。
由于本人采用SWD模式下载。
故按照有图所示连接方式。
1,、7、9、20分别连接PIXRACER中控的FMU_VDD_3V3、FMU_SWDIO、FMU_SWCLK、GND等引脚。
3、下载并安装Jlink驱动及Flash ISP软件解压之后如下图所示,安装V486b即可。
下载之后安装即可。
4、烧写Bootloader打开Flash ISP软件开始-->所有程序-->SEGGER-->J-link ARM v4.86b-->J-flash软件打开后出现以下对话框,选择Creat a new project->Start J-flash.J-flash界面如下图所示:点击Options->Project Options,对General、Target Interfice、CPU、Flash等进行设置。
Pixhawk(PX4)在线刷固件教程及注意事项
如何在线刷固件注意:1.PIX跟APM是不同的,刷固件不能用太老的地面站,最好用最新版本,尤其不要用国内社区版本32.2.电脑不能用XP系统,XP系统只能装很老的地面站,可能无法刷。
3.刷固件前,最好拔掉SD卡,等刷成功后飞控断电,再插SD卡。
(这步不是必须做的,只是官方教材建议做的,经测试,也可不做。
)4.默认出厂就刷好固件,飞控插入电脑会出现端口号,过会消失,再出现,如果你在端口消失时点击刷固件,可能会提示找不到端口号。
所以,你可以一插入马上就点刷固件或者稍微等长一会等待端口稳定后再刷。
下面的注意点非常重要,刷固件要在“初始设置”->”安装固件“的界面去刷,不要用向导去刷固件。
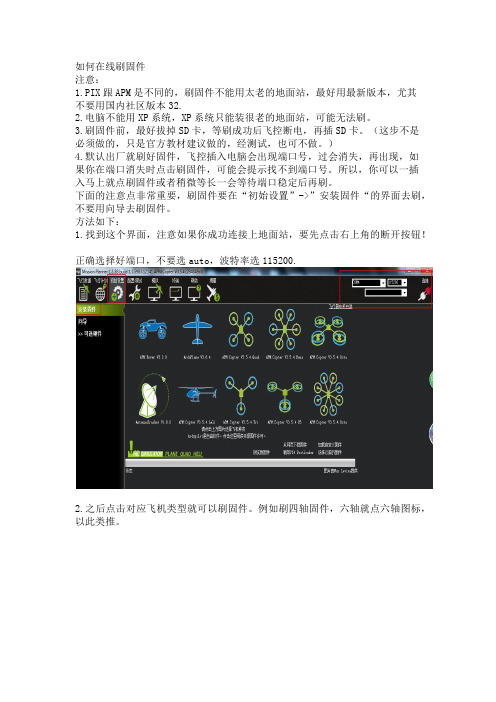
方法如下:1.找到这个界面,注意如果你成功连接上地面站,要先点击右上角的断开按钮!正确选择好端口,不要选auto,波特率选115200.2.之后点击对应飞机类型就可以刷固件。
例如刷四轴固件,六轴就点六轴图标,以此类推。
如果用地面站66以上版本(如果不是该版本就无此提示),之后会提示“Is this a CubeBlack“,一定要点击No,不可以点击yes,因为pixhawk不属于CubeBlack,务必注意。
如果不小心点击yes,解决办法:重新点击刷老版本固件,刷成功后再回头刷最新版本,这回一定要记得提示Is this a CubeBlack?时,点击NO。
之后会跳出一个界面问你是否下载chibiOS,选择“NO”,不要选择“YES”,务必注意。
NUTTX和Chibios 功能是一样的,不存在优劣差别。
注意:如果你坚持要点击yes去刷固件,前提你的电脑要是win10正版系统,否则你会遇到驱动问题,目前官方没有chibios驱动提供。
如果你的电脑是win7,刷完之后,可能会遇到驱动无法识别的问题。
慎重!!!nuttx 支持win10及以下的系统,而chibios 目前只支持部分win7 pro正版系统,win10正版系统,要求比较高。
MissionPlanner地面站操作使用

M i s s i o n P l a n n e r地面站操作使用文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]无人机地面站(GCS)Mission Planner 操作使用手册小左实验室2014-10-1目录Planner简介Mission Planner是无人机地面控制站软件,适用于固定翼,旋翼机和地面车。
仅仅在windows系统下工作。
Mission Planner可给你的自动车辆提供配置工具或动力学控制。
其主要特点:●给控制板提供固件加载●设定,配置及调整飞行器至最优性能●通过在地图上的鼠标点击入口来规划,保存及加载自动任务给飞控板●下载及分析由飞控板创建的任务记录●与PC飞行模拟器连接,提供硬件在环的UAV模拟器●通过适当的数传电台,可以监控飞行器状态,记录电台传递数据,分析电台记录或在FPV模式下工作Planner安装Mission Planner是windows系统上的自由开源软件,安装非常简单。
首先下载最新Mission Planner 安装文件1.下载地址:2.运行安装文件,并按向导执行即可。
3.安装包将自动安装所需软件驱动,包括DirectX plug-in,如遇下面情况,请选择安装软件驱动即可。
4.软件将安装到C:\Program Files (x86)\APM Planner,并创建打开Mission Planner的图标在开始菜单。
5.安装完毕后,即可启动Mission Planner ,启动后即可通过连接按钮,下载固件或连接飞控板。
6.如果有升级版本,软件自动通知3.飞控板固件加载●用MicroUSB连接Pixhawk飞控板,USB连接PC机。
●打开Mission Planner软件,左上角区域从下拉菜单中选择COM口,可以选在AUTO选项,并设置串口通讯波特率为115200。
●在主画面上,选择Initial Setup | Install firmware画面,选择恰当的飞行器图标,回答提示画面“Are you sure”"Yes"。
科友加密机接口

编程手册编程手册 (1)第一篇编程指南 (6)1.1简要介绍 (6)1.2一般说明 (6)1.3三倍DES运算 (7)1.3.1密钥的用法 (7)1.3.2密钥的加密方案 (7)1.ANSI X9.17方式 (7)2.变量方式 (7)YYYY YYYY YYYY YYYY (8)BBBB BBBB BBBB BBBB (8)YYYY YYYY YYYY YYYY (8)BBBB BBBB BBBB BBBB (8)CCCC CCCC CCCC CCCC (8)YYYY YYYY YYYY YYYY (8)ZZZZ ZZZZ ZZZZ ZZZZ (8)BBBB BBBB BBBB BBBB (8)CCCC CCCC CCCC CCCC (8)1.4密钥的生成、输入和输出 (8)1.5命令消息格式 (9)1.5.1TCP/IP方式 (9)1.5.2串口Async方式 (9)1.6响应消息格式 (10)1.6.1TCP/IP方式 (10)1.6.2串口Async方式 (11)1.7数据的表示 (11)1.7.1ASCII字符编码 (12)1.7.2EBCDIC字符编码 (12)1.7.3EBCDIC码至ASCII码的转换表 (14)1.8输入/输出流控制 (16)1.9错误控制 (16)1.10多HSM的使用 (17)1.11用户存储 (17)1.11.1分配和使用索引 (18)1.11.2指定存储数据 (19)1.12通过一台连接在HSM上的打印机打印 (20)1.13禁止弱密钥和半弱密钥 (20)1.13.1DES弱密钥 (20)1.13.2DES半弱密钥 (21)1.14本地主密钥 (21)1.14.1LMK表 (21)1.14.2标准测试用LMK集 (22)1.15本地主密钥变种 (23)1.16本地主密钥三DES变量方案 (24)1.16.1一般说明 (24)1.16.2密钥类型表 (25)1.16.3密钥方案表 (26)第二篇主机命令 (27)2.1一般说明 (27)2.2通用密钥管理命令 (27)2.2.1生成密钥 (28)2.2.2生成并打印一个成份 (29)2.2.3由密的成份组成一个密钥 (31)2.2.4输入一个密钥 (32)2.2.5输出一个密钥 (33)2.3区域主密钥(ZMK)管理 (34)2.3.1生成并打印一个ZMK成份 (35)2.3.2由三个ZMK成份组成一个ZMK (37)2.3.3由2到9个ZMK成份组成一个ZMK (38)2.3.4将ZMK由ZMK转为LMK加密 (40)2.4区域PIN密钥(ZPK)管理 (42)2.4.1生成一个ZPK (43)2.4.2将ZPK由ZMK转为LMK加密 (44)2.4.3将ZPK由LMK转为ZMK加密 (46)2.5区域加密密钥,区域认证密钥管理 (47)2.5.1生成一个ZEK/ZAK (48)2.5.2将ZEK/ZAK从ZMK转为LMK加密 (49)2.5.3将ZEK/ZAK从LMK转为ZMK加密 (50)2.6终端主密钥,终端PIN密钥和终端认证密钥管理 (51)2.6.1生成并打印一个TMK、TPK或PVK (52)2.6.2生成一个TMK、TPK或PVK (54)2.6.3将TMK、TPK或PVK从LMK转为另一TMK、TPK或PVK加密542.6.4将TMK、TPK或PVK从ZMK转为LMK加密 (55)2.6.5将TMK、TPK或PVK从LMK转为ZMK加密 (56)2.6.6生成一对PVKs (57)2.7终端认证密钥管理 (60)2.7.1生成一个TAK (61)2.7.2将TAK从ZMK转为LMK加密 (62)2.7.3将TAK从LMK转为ZMK加密 (63)2.7.4将TAK从LMK转为TMK加密 (64)2.8PIN和Offset的生成 (65)2.8.1生成一个随机的PIN (66)2.8.2生成一个VISA的PIN校验值 (67)2.9PIN校验 (68)2.9.1校验一个用VISA方式的终端PIN (68)2.9.2校验一个用VISA方式的、用于交换的PIN (69)2.9.3校验一个用比对方式的终端PIN (70)2.9.4校验一个用比对方式的、用于交换的PIN (71)2.10PIN翻译 (72)2.10.1将PIN从一个ZPK翻译到另一个ZPK(已升级) (73)2.10.2将PIN从TPK翻译到ZPK (75)2.10.3将PIN从ZPK翻译到LMK (76)2.10.4将PIN从TPK翻译到LMK (77)2.10.5将PIN从LMK翻译到ZPK (78)2.11PIN请求数据处理 (79)2.12清除PIN支持 (81)2.12.1加密一个明文的PIN (82)2.13主机口令支持 (82)2.14消息认证码支持 (83)2.14.1生成一个MAC (84)2.14.2校验一个MAC (85)2.14.3校验并转换一个MAC (85)2.14.4用ANSI X9.19方式对大消息生成MAC(MAB) (86)2.14.5用银联方式对大消息生成MAC(MAB) (88)2.15打印输出的格式 (92)2.15.1字格式打印PINs (95)ONE TWO THREE FOUR (95)2.15.2以列形式打印PINs (96)2.15.3装载格式化数据至HSM (97)2.15.4装载附加格式化数据至HSM (98)2.16复合命令 (99)2.16.1退出授权状态 (99)2.16.2生成密钥校验值(非双倍长度ZMK) (100)2.16.3生成密钥校验值 (101)2.16.4完成诊断 (102)2.16.5HSM状态 (103)2.17VISA卡校验值 (104)2.17.1生成CVK对 (105)2.17.2将CVK对由LMK下加密转换为ZMK下加密 (105)2.17.3将CVK对由ZMK下加密转换为LMK下加密 (106)2.17.4生成VISA CVV (107)2.17.5校验VISA CVV (108)2.17.6用EDK密钥加解密数 (109)第三篇PIN格式 (110)3.1一般说明 (110)3.2格式01 (110)3.3格式02 (111)3.4格式03 (111)3.5格式04 (112)3.6格式05 (113)1NP1...PNR...R . (113)第四篇错误代码 (113)4.1错误代码表 (113)第五篇名词表 (115)5.1一般说明 (115)文档修订记录版本创建日期作者校订备注1.02007/12/21第一篇编程指南1.1 简要介绍HSM(Host Security Module)称为主机安全模块(注:以下将主机安全模块均称为HSM),作为主机的外围设备,为主机在一个物理上安全的环境中实现加/解密运算的功能。
【北航无人驾驶飞行器设计研究所】开源飞控知多少

【北航无人驾驶飞行器设计研究所】开源飞控知多少随着科技的进步,无人机走进普通大众生活只是时间问题。
然而,一直困扰着无人机发展的关键设备就是自动驾驶仪。
随着开源飞控的发展,这个问题得到了突破性的解决,为无人机产品的进一步民用化奠定了基础。
李大伟北京航空航天大学无人驾驶飞行器设计研究所副教授杨炯北京航空航天大学无人驾驶飞行器设计研究所工程师在纷繁复杂的无人机产品中,四旋翼飞行器以其结构简单、使用方便、成本低廉等优势,最先进入了大众的视线。
但是,这种飞行器对飞行控制能力的要求是最高的,因此它刺激了大批基于MEMS传感器的开源飞控的出现。
1 如何定义开源开源(Open Source)的概念最早被应用于开源软件,开放源代码促进会(Open Source Initiative)用其描述那些源码可以被公众使用的软件,并且此软件的使用、修改和发行也不受许可证的限制。
每一个开源项目均拥有自己的论坛,由团队或个人进行管理,论坛定期发布开源代码,而对此感兴趣的程序员都可以下载这些代码,并对其进行修改,然后上传自己的成果,管理者从众多的修改中选择合适的代码改进程序并再次发布新版本。
如此循环,形成“共同开发、共同分享”的良性循环。
开源软件的发展逐渐与硬件相结合,产生了开源硬件。
开源硬件的原则声明和定义是开源硬件协会(Open Source HardWare Association,OSHWA)的委员会及其工作组,以及其他更多的人员共同完成的。
硬件与软件不同之处是实物资源应该始终致力于创造实物商品。
因此,生产在开源硬件(OSHW)许可下的品目(产品)的人和公司有义务明确该产品没有在原设计者核准前被生产,销售和授权,并且没有使用任何原设计者拥有的商标。
硬件设计的源代码的特定格式可以被其他人获取,以方便对其进行修改。
在实现技术自由的同时,开源硬件提供知识共享并鼓励硬件设计开放交流贸易。
开源硬件(OSHW)定义 1.0是在软件开源定义基础上定义的。
MissionPlanner地面站操作使用文档

无人机地面站(GCS)Mission Planner 操作使用手册小左实验室2014-10-1目录Mission Planner 操作使用手册 (1)1.Mission Planner简介 (2)2.Mission Planner安装 (2)3.飞控板固件加载 (3)4.链接飞控板 (5)5.Mission Planner显示面板及特点 (5)5.1连接Connect (5)5.2飞行数据Flight Data (5)5.3飞行规划Flight Planning (7)5.4初始化设置Initial setup (7)5.5参数配置和调整Params Configure安定tuning (7)5.6仿真器 (8)6飞行任务规划 (8)6.1航点规划及动作 (8)6.2任务指令参考 (10)6.3相机控制与自动操作 (11)6.4转场点设置 (13)6.5地形跟踪 (15)7.基于数据记录的故障诊断 (16)7.1基于logs诊断问题 (16)7.2数传电台记录诊断 (20)7.3闪存数据记录 (22)7.4记录数据与回放任务 (25)7.5振动测量分析 (26)8.开源Mission Planner的二次开发基础 (29)8.1Visual Studio Community 13.0打开Mission Planner solution (29)8.2 发布修改后的Mission Planner (31)11.Mission Planner简介Mission Planner是无人机地面控制站软件,适用于固定翼,旋翼机和地面车。
仅仅在windows 系统下工作。
Mission Planner可给你的自动车辆提供配置工具或动力学控制。
其主要特点:●给控制板提供固件加载●设定,配置及调整飞行器至最优性能●通过在地图上的鼠标点击入口来规划,保存及加载自动任务给飞控板●下载及分析由飞控板创建的任务记录●与PC飞行模拟器连接,提供硬件在环的UAV模拟器●通过适当的数传电台,可以监控飞行器状态,记录电台传递数据,分析电台记录或在FPV模式下工作2.Mission Planner安装Mission Planner是windows系统上的自由开源软件,安装非常简单。
Pixhawk飞控源码结构及编译流程分析

源码目录结构(获取源码的方法这里就不多说了,官网或者百度都找得到,用Git工具或者直接上github 下载都可以,推荐还是通过git工具去载, 毕竟在调用make编译之前其实还会通过git去载一些缺少模块,我的是vmware 下的Ubuntu的环境。
这博客在win下写吧,贴代码好像不是很方便,ubuntu下吧截图工具没有又qq截图来得好用,感觉博客写起来有点蛋疼,不知道你们都是咋写的……然后我关注的也是Copter部分,别的就没有深入了解也就不多说……)一、Vehicle directory:ArduCopter(多旋翼)、ArduPlane(固定翼)、APMrover2(巡逻车)、AntennaTracker(天线追踪站台?)二、AP_HAL:硬件抽象层三、Libraries:库文件四、Tools directory:Tools/scripts/install-prereqs-ubuntu.sh//运行这个shell脚本会自动安装ubuntu 环境下编译固件所需要工具,下面看下该文件的内容5 BASE_PKGS="gawk make git arduino-core curl"6 PYTHON_PKGS="pymavlink MAVProxy droneapi catkin_pkg"7 PX4_PKGS="Python-serial python-argparse openocd flex bison libncurses5-dev \8 autoconf texinfo build-essential libftdi-dev libtool zlib1g-dev \9 zip genromfs python-empy"10 BEBOP_PKGS="g++-arm-linux-gnueabihf"11 SITL_PKGS="g++ python-pip python-setuptools python-matplotlib python-serial python-scipy python-opencv python-numpy python-pyparsing ccache realpath"。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PixHawk下载与编译Bootloader文件
购买现成的飞控都是已经烧录好程序的,所以只连接地面站更新固件调试参数就可以了。
但是自己根据官方开源方案设计的PCB就必须烧录引导程序芯片才可以正常工作。
本文以PixHawk(PixFmu2.4.5)为例讲解。
一、安装下载与编译软件PX4 Toolchain
1.1、下载编译文件
进入官网/dev/toolchain_installation_win下载最新安装程序,(这里是以windows操作系统为例,其它系统可以下载对应安装程序)如何下图:
右击目标另存为安装文件。
1.2、安装编译文件
双击安装文件,根据提示安装软件,安装成功后在电脑程序栏处找到PX4 Toolchain
(本例安装版本:px4_toolchain_installer_v14_win),此软件包含以下分支应用,HTerm,PX4 Console,PX4 Eclipse,PX4 Software Download,TeraTerm,Uninstall PX4.
二、下载与编译Bootloader文件
2.1、打开下载软件PX4 Toolchain / PX4 Console软件
2.2、根据提示输入命令(红色字体部分,进入下载网址并下载Bootloader文件,)
Administrator@WIN-09210921 /d/px4
$ git clone https:///PX4/Bootloader.git 回车
完成后,将会在安装文件夹下新建Bootloader文件夹并下载官网相关文件到些文件夹。
2.3、根据提示输入命令(红色字体部分,选择文件夹)
Administrator@WIN-09210921 /d/px4
$ cd Bootloader 回车
2.4、根据提示输入命令(红色字体部分,下载并生成bootloader文件)
Administrator@WIN-09210921 /d/px4/Bootloader
$ make 回车
2.5、根据提示输入命令(红色字体部分,初始化文件)
Administrator@WIN-09210921 /d/px4/Bootloader
$ git submodule init 回车
2.6、根据提示输入命令(红色字体部分,升级文件)
Administrator@WIN-09210921 /d/px4/Bootloader
$ git submodule update 回车
2.7、根据提示输入命令(红色字体部分,下载stylefix文件)
Administrator@WIN-09210921 /d/px4/Bootloader
$ make 回车
注意:以上步骤即可以生成PIX所需要的bootloader文件,官网上提供三个版本的文件可以供下载(master(最新版本),stylefix(合适版本),vetting(通过审核版本)),但是这里默认下载生成的是最新(master版本)的文件。
经过测试,最新版本的文件可能不成熟等原因,会造成飞控可以连接地面站却下载不了固件,又或者可以下载固件却连接不了地面站。
所以要按照以下步骤更新为stylefix(合适版本)。
2.8、更新成stylefix文件
打开下载软件PX4 Toolchain \ PX4 Console,
根据提示输入命令(红色字体部分)
Administrator@WIN-09210921 /d/px4
$ cd Bootloader 回车
2.9、根据提示输入命令(红色字体部分)
Administrator@WIN-09210921 /d/px4/Bootloader
$ git checkout –b stylefix origin/stylefix 回车
2.10、根据提示输入命令(红色字体部分)
Administrator@WIN-09210921 /d/px4/Bootloader
$ make 回车
以上步骤完成生成stylefix版本的bootloader文件
三、下载Firmware文件(主程序源代码)
2.1、运行(主程序源代码)
保存路径(软件安装目录下,自动生成)
Administrator@WIN-09210921 /d/px4
$ git clone https:///PX4/Firmware.git
以上开始下载更新程序(过程约20分钟,具体时间视电脑与网络为准)
四、更新Firmware文件(官网上经常会更新文件)
4.1、根据提示输入命令(红色字体部分)打开Firmware
Administrator@WIN-09210921 /d/px4
$ cd Firmware
4.2、根据提示输入命令(红色字体部分)后回车,初始化更新文件
Administrator@WIN-09210921 /d/px4/Firmware
$ git submodule init
4.3、等以上步骤完成后(约1分钟左右),根据提示输入命令(红色字体部分)后回车Administrator@WIN-09210921 /d/px4/Firmware
$ git submodule update
以上开始下载更新程序(过程约20分钟,具体时间视电脑与网络为准)。