BP程序
用matlab编BP神经网络预测程序
求用matlab编BP神经网络预测程序求一用matlab编的程序P=[。
];输入T=[。
];输出% 创建一个新的前向神经网络net_1=newff(minmax(P),[10,1],{'tansig','purelin'},'traingdm')% 当前输入层权值和阈值inputWeights=net_1.IW{1,1}inputbias=net_1.b{1}% 当前网络层权值和阈值layerWeights=net_1.LW{2,1}layerbias=net_1.b{2}% 设置训练参数net_1.trainParam.show = 50;net_1.trainParam.lr = 0.05;net_1.trainParam.mc = 0.9;net_1.trainParam.epochs = 10000;net_1.trainParam.goal = 1e-3;% 调用TRAINGDM 算法训练BP 网络[net_1,tr]=train(net_1,P,T);% 对BP 网络进行仿真A = sim(net_1,P);% 计算仿真误差E = T - A;MSE=mse(E)x=[。
]';%测试sim(net_1,x) %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%不可能啊我200928对初学神经网络者的小提示第二步:掌握如下算法:2.最小均方误差,这个原理是下面提到的神经网络学习算法的理论核心,入门者要先看《高等数学》(高等教育出版社,同济大学版)第8章的第十节:“最小二乘法”。
3.在第2步的基础上看Hebb学习算法、SOM和K-近邻算法,上述算法都是在最小均方误差基础上的改进算法,参考书籍是《神经网络原理》(机械工业出版社,Simon Haykin著,中英文都有)、《人工神经网络与模拟进化计算》(清华大学出版社,阎平凡,张长水著)、《模式分类》(机械工业出版社,Richard O. Duda等著,中英文都有)、《神经网络设计》(机械工业出版社,Martin T. Hargan等著,中英文都有)。
BP算法过程
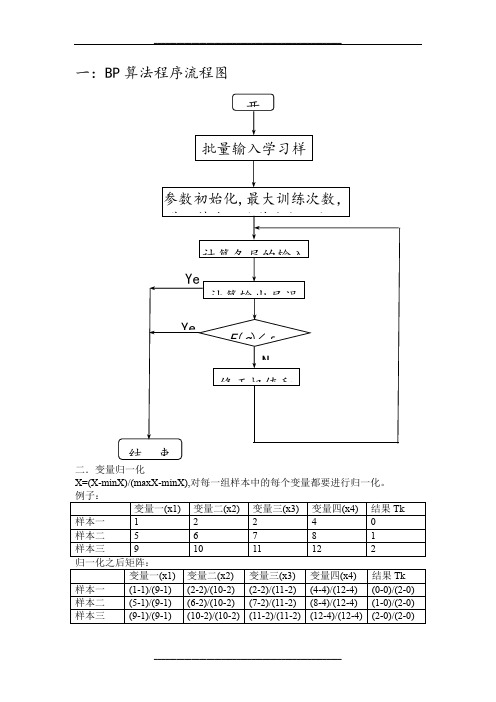
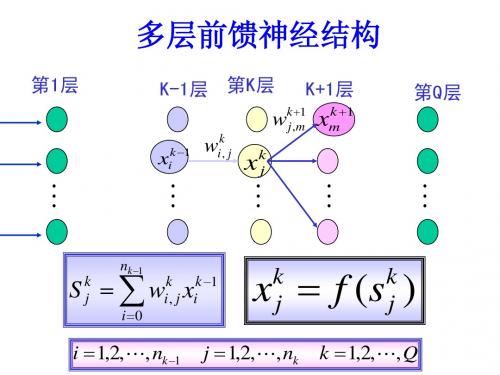
一:BP 算法程序流程图二.变量归一化X=(X -minX)/(maxX -minX),对每一组样本中的每个变量都要进行归一化。
例子: 变量一(x1) 变量二(x2) 变量三(x3) 变量四(x4) 结果Tk 样本一 1 2 2 4 0 样本二 5 6 7 8 1 样本三 9 10 11 12 2 归一化之后矩阵: 变量一(x1) 变量二(x2) 变量三(x3) 变量四(x4) 结果Tk 样本一 (1-1)/(9-1) (2-2)/(10-2) (2-2)/(11-2) (4-4)/(12-4) (0-0)/(2-0) 样本二 (5-1)/(9-1) (6-2)/(10-2) (7-2)/(11-2) (8-4)/(12-4) (1-0)/(2-0) 样本三 (9-1)/(9-1) (10-2)/(10-2) (11-2)/(11-2) (12-4)/(12-4) (2-0)/(2-0)结 束参数初始化,最大训练次数,学习精度,隐节点数,初始批量输入学习样计算各层的输入计算输出层误E (q )<ε修正权值和YeNYe开三.数学过程输出层中M=14,隐含层中q=9,学习率ƞ=0.01,L=1,ε=1e-10,最大训练次数为5000次.这个神经网络就只有一个输出神经元,所以每组样本值输出一个值一般取初始权值在(-1,1)之间的随机数,初始阈值取(0,1)之间的随机数表示隐含层第i个节点到输入层第j个节点之间的权值;表示隐含层第i个节点的阈值;表示隐含层的激励函数;=1/(1+e-x)表示输出层第个节点到隐含层第i个节点之间的权值,i=1,…,q;表示输出层第k个节点的阈值,k=1,…,L;表示输出层的激励函数,=x;表示输出层第个节点的输出,k=1。
(1)信号的前向传播过程隐含层第i个节点的输入net i:(3-1)隐含层第i个节点的输出y i:(3-2)输出层第k个节点的输入net k,k=1:ijwiθ()xφ()xφkiw kka()xψ()xψko k1Mi ij j ijnet w xθ==+∑1()()Mi i ij j ijy net w xφφθ===+∑………………输出变量输入变量输入层隐含层输出层(3-3)输出层第k 个节点的输出o k ,k=1:(3-4)(2)误差的反向传播过程误差的反向传播,即首先由输出层开始逐层计算各层神经元的输出误差,然后根据误差梯度下降法来调节各层的权值和阈值,使修改后的网络的最终输出能接近期望值。
标准的BP神经网络算法程序MATLAB

count=1;
while (count<=maxcount) %结束条件1迭代1000次
c=1;
while (c<=samplenum)
for k=1:outputNums
d(k)=expectlist(c,k); %获得期望输出的向量,d(1:3)表示一个期望向量内 的值
end
break;
end
count=count+1;%训练次数加1
end%第一个while结束
error(maxcount+1)=error(maxcount);
p=1:count;
pp=p/50;
plot(pp,error(p),"-"); %显示误差
deltv(i,j)=alpha*yitay(j)*x(i); %同上deltw
v(i,j)=v(i,j)+deltv(i,j)+a*dv(i,j);
dv(i,j)=deltv(i,j);
end
end
c=c+1;
end%第二个while结束;表示一次BP训练结束
double tmp;
for i=1:inputNums
x(i)=samplelist(c,i); %获得输入的向量(数据),x(1:3)表一个训练向量
字串4
end
%Forward();
for j=1:hideNums
net=0.0;
for i=1:inputNums
net=net+x(i)*v(i,j);
dw=zeros(hideNums,outputNums); %10*3
BP预报程序(外推预测)示例

A(4) A(5) A(6) A(7);
A(5) A(6) A(7) A(8);
A(6) A(7) A(8) A(9);
A(7) A(8) A(9) A(10);
A(8) A(9) A(10) A(11)]'; %预报值测试样本
可以对神经网络在MATLAB平台上的具体操作有较快的入门。
说明:此程序数据序列较短,仅为示意。
BP 程序在外推预测方面不大如意,希望能结合灰色理论或时间序列方面的相关知识以进行优化。
out=sim(net,P_test);
for i=1:8 %数据反归一化
predict(i)=out(i)*(max(x0)-min(x0))+min(x0)
end
仔细阅读,飞思科技产品研发中心.
神经网络理论与MATLAB7实现[M]. 北京: 电子工业出版社, 2005 一书,
end
P=[A(1) A(2) A(3) A(4);
A(2) A(3) A(4) A(5);
A(3) A(4) A(5) A(6);
A(4) A(5) A(6) A(7);
A(5) A(6) A(7) A(8);
A(6) A(7) A(8) A(9);
A(7) A(8) A(9) A(10)]';
net.trainParam.goal=0.00001;
LP.lr=0.1;
net.trainParam.epochs=1000;
net=train(net,P,T); %网络训练 பைடு நூலகம்
P_test=[A(1) A(2) A(3) A(4);
基于C语言的BP神经网络预测程序开发-任务书
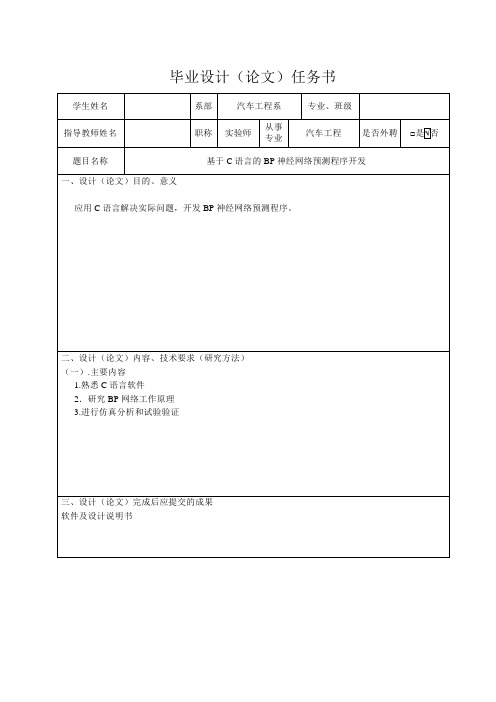
毕业设计(论文)任务书
学生姓名 指导教师姓名
题目名称 一、设计(论文)目的、意义
系部
汽车工程系
专业、班级
职称
实验师
从事 专业
汽车工程 是否外聘 □是√否
基于 C 语言的 BP 神经网络预测程序开发
应用 C 语言解决实际问题,开发 BP 神经网络预测程序。
BP算法程序实现

BP算法程序实现BP(Back Propagation)神经网络是一种常见的人工神经网络模型,是一种监督学习算法。
在BP算法中,神经网络的参数通过反向传播的方式得到更新,以最小化损失函数。
BP神经网络的实现主要分为前向传播和反向传播两个步骤。
首先,我们需要定义BP神经网络的结构。
一个典型的BP神经网络包括输入层、隐藏层和输出层。
输入层接收原始数据,隐藏层进行特征提取和转换,输出层进行最终的预测。
在实现BP神经网络时,我们首先需要进行初始化。
初始化可以为神经网络的权重和偏置添加一些随机的初始值。
这里我们使用numpy库来处理矩阵运算。
前向传播的过程实际上就是将输入数据通过神经网络的每一层,直到输出层。
在每一层中,我们将对应权重和输入数据进行点乘运算,并加上偏置项,然后通过一个激活函数进行非线性转换。
这里我们可以选择sigmoid函数作为激活函数。
在反向传播中,我们根据损失函数对权重和偏置进行调整。
首先,我们计算输出误差,即预测值与真实值之间的差异。
然后,我们根据链式法则来计算每一层的误差,并将误差传递回前一层。
根据误差和激活函数的导数,我们可以计算每个权重和偏置的更新量,然后使用梯度下降法对权重和偏置进行更新。
实现BP算法的程序如下:```pythonimport numpy as npclass NeuralNetwork:def __init__(self, layers):yers = layersself.weights = [np.random.randn(y, x) for x, y inzip(layers[:-1], layers[1:])]self.biases = [np.random.randn(y, 1) for y in layers[1:]] def forward(self, x):a = np.array(x).reshape(-1, 1)for w, b in zip(self.weights, self.biases):z = np.dot(w, a) + ba = self.sigmoid(z)return adef backward(self, x, y, lr=0.01):a = np.array(x).reshape(-1, 1)targets = np.array(y).reshape(-1, 1)# forward passactivations = [a]zs = []for w, b in zip(self.weights, self.biases):z = np.dot(w, a) + bzs.append(z)a = self.sigmoid(z)activations.append(a)# backward passdeltas = [self.loss_derivative(activations[-1], targets) * self.sigmoid_derivative(zs[-1])]for l in range(2, len(yers)):z = zs[-l]sp = self.sigmoid_derivative(z)deltas.append(np.dot(self.weights[-l + 1].T, deltas[-1]) * sp)deltas.reverse# update weights and biasesfor l in range(len(yers) - 1):self.weights[l] += -lr * np.dot(deltas[l], activations[l].T) self.biases[l] += -lr * deltas[l]def sigmoid(x):return 1 / (1 + np.exp(-x))def sigmoid_derivative(x):return NeuralNetwork.sigmoid(x) * (1 -NeuralNetwork.sigmoid(x))def loss_derivative(y_pred, y_true):return y_pred - y_true```上述代码中,首先我们定义一个NeuralNetwork类,包含两个主要方法:forward(和backward(。
bp是什么意思
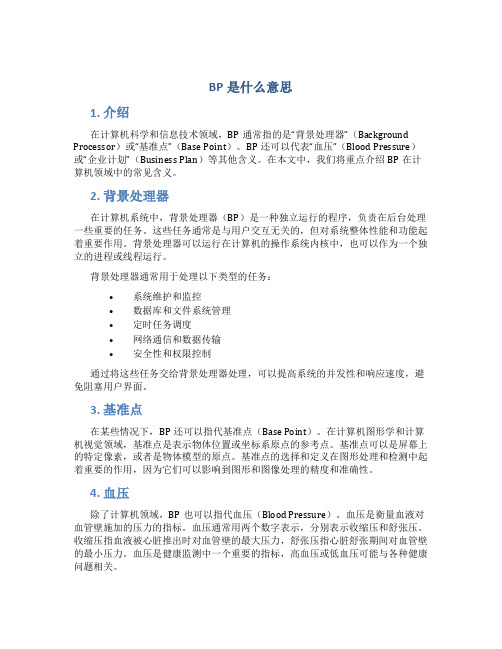
BP是什么意思1. 介绍在计算机科学和信息技术领域,BP通常指的是“背景处理器”(Background Processor)或“基准点”(Base Point)。
BP还可以代表“血压”(Blood Pressure)或“企业计划”(Business Plan)等其他含义。
在本文中,我们将重点介绍BP在计算机领域中的常见含义。
2. 背景处理器在计算机系统中,背景处理器(BP)是一种独立运行的程序,负责在后台处理一些重要的任务。
这些任务通常是与用户交互无关的,但对系统整体性能和功能起着重要作用。
背景处理器可以运行在计算机的操作系统内核中,也可以作为一个独立的进程或线程运行。
背景处理器通常用于处理以下类型的任务:•系统维护和监控•数据库和文件系统管理•定时任务调度•网络通信和数据传输•安全性和权限控制通过将这些任务交给背景处理器处理,可以提高系统的并发性和响应速度,避免阻塞用户界面。
3. 基准点在某些情况下,BP还可以指代基准点(Base Point)。
在计算机图形学和计算机视觉领域,基准点是表示物体位置或坐标系原点的参考点。
基准点可以是屏幕上的特定像素,或者是物体模型的原点。
基准点的选择和定义在图形处理和检测中起着重要的作用,因为它们可以影响到图形和图像处理的精度和准确性。
4. 血压除了计算机领域,BP也可以指代血压(Blood Pressure)。
血压是衡量血液对血管壁施加的压力的指标。
血压通常用两个数字表示,分别表示收缩压和舒张压。
收缩压指血液被心脏推出时对血管壁的最大压力,舒张压指心脏舒张期间对血管壁的最小压力。
血压是健康监测中一个重要的指标,高血压或低血压可能与各种健康问题相关。
5. 企业计划此外,在商业和管理领域,BP也可以指代企业计划(Business Plan)。
企业计划是一个详细描述企业发展目标、战略和操作计划的文档。
它通常包括企业的使命和愿景、市场分析、产品和服务策略、营销计划、财务预测等内容。
基于BP神经网络的非线性函数拟合——程序设计说明
基于BP神经网络的非线性函数拟合——程序设计说明程序设计说明:1.确定网络结构首先,需要确定BP神经网络的结构,包括输入层、隐藏层和输出层的节点数。
输入层的节点数由样本的特征数确定,隐藏层的节点数可以通过试验确定,输出层的节点数则由问题的要求确定。
2.初始化网络参数初始化网络的权值和偏置,可以使用随机数生成,初始值不能太大或太小。
权值和偏置的初始值会对模型的训练效果产生影响,一般可以根据问题的复杂程度来选择。
3.前向传播通过前向传播,将样本数据输入到神经网络中,并计算每个神经元的激活值。
激活函数可以选择Sigmoid函数或者ReLU函数等非线性函数。
4.计算误差5.反向传播通过反向传播,将误差从输出层向输入层传播,更新网络的权值和偏置。
反向传播的过程可以使用梯度下降法来更新网络参数。
6.训练网络7.测试网络使用未参与训练的样本数据测试网络的泛化能力,计算测试误差。
如果测试误差较小,说明网络能够较好地拟合非线性函数。
8.参数调优根据训练误差和测试误差结果,可以调整网络的参数,如学习率、隐藏层节点数等,以提高网络的训练效果和泛化能力。
9.反复训练和测试网络根据需要,反复进行训练和测试的过程,直至网络的训练误差和测试误差均满足要求。
这是一个基于BP神经网络的非线性函数拟合的程序设计说明,通过实现以上步骤,可以有效地进行非线性函数的拟合和预测。
在具体实现中,可以使用Python等编程语言和相应的神经网络框架,如TensorFlow、PyTorch等,来简化程序的编写和调试过程。
同时,为了提高程序的性能和效率,可以使用并行计算和GPU加速等技术。
汇编中BPSP有何区别分别怎么使用

汇编中BPSP有何区别分别怎么使用在汇编语言中,BP(Base Pointer)和SP(Stack Pointer)是两个非常重要的寄存器。
它们分别用于提供程序的基址和栈顶地址,并且在程序执行过程中起到了关键的作用。
1. BP(Base Pointer):BP寄存器作为基址寄存器,主要用于引用数据段中的变量。
它常用于进程的运行时堆栈和局部变量的访问。
BP寄存器通常在函数调用和返回时使用,帮助程序跟踪保存在堆栈中的局部变量和函数参数。
BP寄存器可以通过以下指令来设置和访问:-MOV指令:将一个值复制到BP寄存器。
-PUSH指令:将BP寄存器中的值推入堆栈。
-POP指令:将堆栈中的值弹出并存储到BP寄存器。
使用BP寄存器的典型场景是在函数调用过程中保存旧的BP值,然后将堆栈指针移动到栈顶。
这样可以为局部变量分配空间,并通过BP寄存器引用这些变量。
例如,以下是一个使用BP寄存器的示例代码片段:```assemblymain:MOVBP,SP;保存当前BP值SUBSP,4;为局部变量分配空间...;其他指令...MOVSP,BP;恢复堆栈指针POPBP;恢复旧的BP值RET;返回```2. SP(Stack Pointer):SP寄存器用于跟踪堆栈的栈顶地址。
堆栈是一种后进先出(LIFO)数据结构,用于存储临时数据、函数调用信息和局部变量。
SP寄存器可以通过以下指令来设置和访问:-MOV指令:将一个值复制到SP寄存器。
-PUSH指令:将一个值推入堆栈并递减SP寄存器的值。
-POP指令:将堆栈中的值弹出并递增SP寄存器的值。
使用SP寄存器的典型场景是在函数调用过程中为函数参数和临时变量分配空间,并在函数返回时恢复堆栈指针。
以下是一个使用SP寄存器的示例代码片段:```assemblymain:SUBSP,4;为局部变量分配空间PUSH10;将10推入堆栈...;其他指令...ADDSP,4;恢复堆栈指针RET;返回```总结起来,BP用于引用数据段中的变量,主要用于函数调用和返回过程中的局部变量的访问;SP用于跟踪堆栈的栈顶地址,主要用于为函数参数和临时变量分配空间。
英国BP制规则
1、BP制是British Parliamentary(英国议会制)的简称,是仿照英国议会开会议事模式而设计的一系列辩论赛规则的总称,是全世界范围内使用最广泛的辩论规则,世界大学生辩论赛WUDC(The World Universities Debating Championships)及中国辩论公开赛China Open均使用此规则。
2、常见的BP制是四队议会制辩论,每场比赛分正反双方,设“正方上院”、“正方下院”、“反方上院”、“反方下院”四队,每队两人,故可概括为“两方、四队、八人”。
3、胜负评判为排序制,即根据各队表现在四队中排出1、2、3、4名,胜负不以正反方而论,即完全可以出现正方上院第一名而正方下院第四名的情况。
4、BP制的竞赛程序可简单描述为“角色扮演”+“交替演讲”,每位辩手均拥有一个议员角色,均拥有7分钟左右(不同赛事时长不一)发言时长,正反方从上到下交替发言,没有自由辩论等任何快速交替发言环节。
?5、BP制有一种特殊的“质询”规则:Point of Information?(“PoI”)。
PoI允许对方辩手在“非保护时间”(每人发言时间中除开第一分钟和最后一分钟之外的所有时间)示意要求提问,经发言者允许后向发言者提问质询。
质询者提问时间计入发言者时长,故针对PoI,发言者有权决定是否接受、何时接受、如何回答等事宜。
?6、BP制区别于常见华语辩论赛制的最大特点在于“角色扮演”,如下表:?正方上院第一位发言者首相(Prime Minister)正方一辩反方上院第一位发言者反对党领袖(Leader of the Opposition)反方一辩正方上院第二位发言者副首相(Deputy Prime Minister)正方二辩反方上院第二位发言者反对党副领袖(Deputy Leader of the反方二辩Opposition)正方下院第一位发言者政府阁员(Member of Government)正方三辩反方下院第一位发言者反对党阁员(Member of the Opposition)反方三辩正方下院第二位发言者政府党鞭(Government Whip)正方四辩反方下院第二位发言者反对党党鞭(Opposition Whip)反方四辩?7、除一般的“立我方、批对方”的发言责任外,BP制中每个角色还有其独特的角色责任,对该责任的实现程度构成胜负评判的最大因素。
SAR成像BP算法仿真源程序及结果
SAR成像BP算法仿真源程序及结果SAR(Synthetic Aperture Radar,合成孔径雷达)成像是一种利用合成孔径的技术,通过合成大尺寸天线阵列所接收到的多个回波信号,对地物进行成像的一种雷达成像技术。
背向散射点(Backscatter Point,BP)是其中的一个重要概念,指的是雷达波束照射到地物上的一个点,接收到的回波信号。
BP算法可以通过计算背向散射点的位置和回波信号的相位差,实现对地物的成像。
下面是一个SAR成像BP算法的仿真源程序及结果。
为了简化问题,我们假设只有一个背向散射点,并且坐标为(0,0)。
```pythonimport numpy as npimport matplotlib.pyplot as plt#设置成像区域的大小和分辨率range_bins = 1000 # 距离向像元数azimuth_bins = 1000 # 方位向像元数range_resolution = 1 # 距离分辨率azimuth_resolution = 1 # 方位分辨率#构造回波信号target = np.array([[0]]) # 背向散射点target_amplitude = 1 # 背向散射点的幅度target_phase = np.pi / 4 # 背向散射点的相位#构造合成孔径雷达的波束beam = np.zeros((azimuth_bins, range_bins)) # 保存波束数据for r in range(range_bins):for a in range(azimuth_bins):#计算距离和方位range_distance = r * range_resolutionazimuth_distance = a * azimuth_resolution#计算背向散射点到波束位置的相位差phase_difference = 4 * np.pi / wavelength *(range_distance**2 + azimuth_distance**2)#计算波束位置的回波信号beam[a, r] = target_amplitude * np.exp(1j * (target_phase + phase_difference))# 对波束进行逆快速傅里叶变换(Inverse Fast Fourier Transform, IFFT)image = np.fft.ifft2(beam)#显示成像结果plt.imshow(np.abs(image), cmap='gray', extent=[0, range_bins * range_resolution, 0, azimuth_bins * azimuth_resolution])plt.colorbarplt.title('SAR Image')plt.xlabel('Range (m)')plt.ylabel('Azimuth (m)')plt.show```以下是对上述源程序的分析:1. 我们首先需要设置成像区域的大小和分辨率,即range_bins和azimuth_bins。
SAR成像BP算法仿真源程序及结果
SAR成像BP算法仿真源程序及结果以下是一个基于BP算法的SAR成像仿真的源程序及结果展示。
源程序如下所示:```pythonimport numpy as npimport matplotlib.pyplot as plt#设置参数c=3*10**8#光速fc = 2 * 10**9 # 载频B=10**6#带宽lambda_ = c / fc # 波长#设置SAR系统参数Fs=2*B#采样频率T=1/Fs#采样周期PRI = 1 / fc # 脉冲重复间隔Rmax = 5000 # 最大探测距离Vr=500#目标速度#生成模拟的回波信号t = np.arange(0, PRI, T) # 一个脉冲内的时间序列F = np.linspace(-B/2, B/2, len(t)) # 频率序列R = np.linspace(0, Rmax, int(Fs * PRI)) # 距离序列#生成目标雷达截面target_rcs = 0.5 # 目标雷达截面target_distance = 2000 # 目标距离target_velocity = 0 # 目标速度#生成基站回波信号def generate_echo_signal(R, t, F, target_rcs,target_distance, target_velocity):for i in range(len(R)):for j in range(len(t)):delay = 2 * R[i] / c # 延迟时间doppler_shift = 2 * target_velocity * F[j] / fc # 多普勒频移phase_shift = 2 * np.pi * (F[j] * delay + fc * doppler_shift) # 相位差echo_signal[i][j] = np.exp(1j*phase_shift) * target_rcs /R[i]**2 # 回波信号return echo_signalecho_signal = generate_echo_signal(R, t, F, target_rcs,target_distance, target_velocity)#使用BP算法进行SAR成像def sar_imaging(echo_signal, R, t, F, c, fc, B, lambda_):for i in range(len(R)):for j in range(len(t)):for k in range(len(R)):for l in range(len(t)):delay = 2 * (R[i] - R[k]) / c # 延迟时间差doppler_shift = 2 * Vr * F[j] / fc # 多普勒频移phase_shift = 2 * np.pi * (F[j] * delay + fc * doppler_shift) # 相位差image[i][j] += echo_signal[k][l] * np.exp(1j*phase_shift) #累积成像return abs(image)image = sar_imaging(echo_signal, R, t, F, c, fc, B, lambda_)#展示SAR成像结果plt.figureplt.imshow(np.flipud(image), cmap='gray', extent=[0,np.max(t), np.min(R), np.max(R)])plt.xlabel('Time (s)')plt.ylabel('Range (m)')plt.title('SAR Imaging Result')plt.colorbarplt.show```运行以上程序,即可得到一张SAR成像结果图像。
辨识程序例子BP算法
BP算法 算法
nQ
δ
k pj
=−
∂E p ∂x
k pj
⋅ f (s )
' k pj
1. 输出层神经元的输出对 的影响 输出层神经元的输出对E的影响
1 Q 2 Q E p = ∑ [d pj − x pj ] 2 j =1
Sigmoid2.m 函数文件
• function y=sigmoid2(x) • y=(1-exp(-x))/(1+exp(-x)) • end
BP算法的实现(测试数据产生) 算法的实现(测试数据产生) 算法的实现
for k=1:500 u(k)=sin(2*pi*k/250); end for k=501:1000 u(k)=0.8*sin(2*pi*k/250)+0.2*sin(2*pi*k/25); end for k=4:1000 y(k)=0.7*(y(k-1)*y(k-2)*y(k-3)*u(k2)*(y(k-3)-1)+u(k-1))/(1+y(k-2)^2+y(k-3)^2); end
BP算法的实现(学习结果显示) 算法的实现(学习结果显示) 算法的实现
clf t=1:1000; subplot(211),plot(t,y(t),'r',t,y1(t),'-g') xlabel('Time k') grid subplot(212),plot(mste) xlabel('Time k')
clear in=5; hid=5; out=1; N=2000; w2=rand(hid,in)-0.5; w3=rand(out,hid)-0.5; a=0.1; y(:,1:3)=zeros(1,3); u=2*(rand(1,N)-.5); for k=4:N y(k)=0.7*(y(k-1)*y(k-2)*y(k-3)*u(k-2)*(y(k-3)1)+u(k-1))/(1+y(k-2)^2+y(k-3)^2); end
android bp 条件编译
android bp 条件编译Android BP 条件编译在Android开发中,我们常常会遇到需要根据不同的条件编译不同的代码的情况。
这就需要用到Android BP(Build Prop)条件编译。
本文将介绍Android BP条件编译的基本概念和使用方法。
一、什么是Android BP条件编译Android BP条件编译是一种根据预定义的条件,选择性地编译不同的代码的技术。
通过使用条件编译,我们可以根据不同的需求,在不同的环境下编译不同的代码,以达到更好的性能和适应性。
二、为什么需要Android BP条件编译1. 提高性能:有些功能只在特定的环境下才需要,而在其他环境下不需要。
通过条件编译,可以避免将不必要的代码编译进最终的应用程序,从而提高性能。
2. 减小包体积:有些功能在某些情况下可能不需要,但是如果将所有的代码都编译进应用程序,将会增加应用程序的包体积。
通过条件编译,可以根据需求只编译必要的代码,从而减小包体积。
3. 适应不同的设备:在不同的设备上,可能会存在一些差异,例如不同的屏幕尺寸、不同的硬件支持等。
通过条件编译,可以根据不同的设备特性,编译适应该设备的代码。
三、Android BP条件编译的基本用法1. 定义条件:在Android开发中,我们可以通过在build.gradle 文件中定义不同的条件。
例如,我们可以定义一个名为"debug"的条件,表示是否为调试模式。
2. 使用条件:在代码中,我们可以使用if语句来根据条件选择性地执行不同的代码块。
例如,我们可以使用以下代码来根据"debug"条件选择性地执行不同的代码块:```if (BuildConfig.DEBUG) {// 在调试模式下执行的代码} else {// 在发布模式下执行的代码}```3. 定义条件值:在build.gradle文件中,我们可以为条件定义不同的值。
例如,我们可以为"debug"条件定义值为true,表示当前为调试模式。
bp赛制
英国议会制辩论比赛规则1、BP制是British Parliamentary(英国议会制)的简称,是仿照英国议会开会议事模式而设计的一系列辩论赛规则的总称,是全世界范围内使用最广泛的辩论规则,世界大学生辩论赛WUDC(The World Universities Debating Championships)及中国辩论公开赛China Open均使用此规则。
2、常见的BP制是四队议会制辩论,每场比赛分正反双方,设“正方上院”、“正方下院”、“反方上院”、“反方下院”四队,每队两人,故可概括为“两方、四队、八人”。
3、胜负评判为排序制,即根据各队表现在四队中排出1、2、3、4名,胜负不以正反方而论,即完全可以出现正方上院第一名而正方下院第四名的情况。
4、BP制的竞赛程序可简单描述为“角色扮演”+“交替演讲”,每位辩手均拥有一个议员角色,均拥有7分钟左右(不同赛事时长不一)发言时长,正反方从上到下交替发言,没有自由辩论等任何快速交替发言环节。
5、BP制有一种特殊的“质询”规则:Point of Information (“PoI”)。
PoI允许对方辩手在“非保护时间”(每人发言时间中除开第一分钟和最后一分钟之外的所有时间)示意要求提问,经发言者允许后向发言者提问质询。
质询者提问时间计入发言者时长,故针对PoI,发言者有权决定是否接受、何时接受、如何回答等事宜。
6、BP制区别于常见华语辩论赛制的最大特点在于“角色扮演”,如下表:7、除一般的“立我方、批对方”的发言责任外,BP制中每个角色还有其独特的角色责任,对该责任的实现程度构成胜负评判的最大因素。
择其精要:8、竞赛组织:一般采取赛前15分钟公布辩题、公布各队所处“赛位”(角色)。
辩题又称“动议”Motion,一般以“本院认为···”This House···的句式给出。
9、评判方式:比赛结束后评委闭门商议产生排序结论,其后由主评当场宣布结果并解释评判理由。
BP算法程序实现
BP算法程序实现BP算法(Back Propagation Algorithm,即反向传播算法)是一种用于训练神经网络的常用算法。
它的基本思想是通过不断地调整神经元之间的连接权值,使得网络的输出接近于期望的输出。
在实现BP算法时,需要进行以下几个步骤:1.初始化参数:首先,需要初始化神经网络的权值和偏置,通常可以使用随机的小数来初始化。
同时,需要设置好网络的学习率和最大迭代次数。
2.前向传播:通过前向传播过程,将输入数据输入到神经网络中,并计算出每个神经元的输出。
具体来说,对于第一层的神经元,它们的输出即为输入数据。
对于后续的层,可以使用如下公式计算输出:a[i] = sigmoid(z[i])其中,a[i]表示第i层的输出,z[i]为第i层的输入加权和,sigmoid为激活函数。
3.计算误差:根据网络的输出和期望的输出,可以计算出网络的误差。
一般来说,可以使用均方差作为误差的度量指标。
loss = 1/(2 * n) * Σ(y - a)^2其中,n为训练样本的数量,y为期望输出,a为网络的实际输出。
4.反向传播:通过反向传播算法,将误差从输出层向输入层逐层传播,更新权值和偏置。
具体来说,需要计算每一层神经元的误差,并使用如下公式更新权值和偏置:delta[i] = delta[i+1] * W[i+1]' * sigmoid_derivative(z[i])W[i] = W[i] + learning_rate * delta[i] * a[i-1]'b[i] = b[i] + learning_rate * delta[i]其中,delta[i]为第i层的误差,W[i]为第i层与i+1层之间的权值,b[i]为第i层的偏置,learning_rate为学习率,sigmoid_derivative为sigmoid函数的导数。
5.迭代更新:根据步骤4中的更新公式,不断迭代调整权值和偏置,直到达到最大迭代次数或误差小于一些阈值。
BPdebate
1、BP制是British Parliamentary(英国议会制)的简称,是仿照英国议会开会议事模式而设计的一系列辩论赛规则的总称,是全世界范围内使用最广泛的辩论规则,世界大学生辩论赛WUDC(The World Universities Debating Championships)及中国辩论公开赛China Open均使用此规则。
2、常见的BP制是四队议会制辩论,每场比赛分正反双方,设“正方上院”、“正方下院”、“反方上院”、“反方下院”四队,每队两人,故可概括为“两方、四队、八人”。
3、胜负评判为排序制,即根据各队表现在四队中排出1、2、3、4名,胜负不以正反方而论,即完全可以出现正方上院第一名而正方下院第四名的情况。
4、BP制的竞赛程序可简单描述为“角色扮演”+“交替演讲”,每位辩手均拥有一个议员角色,均拥有7分钟左右(不同赛事时长不一)发言时长,正反方从上到下交替发言,没有自由辩论等任何快速交替发言环节。
5、BP制有一种特殊的“质询”规则:Point of Information (“PoI”)。
PoI允许对方辩手在“非保护时间”(每人发言时间中除开第一分钟和最后一分钟之外的所有时间)示意要求提问,经发言者允许后向发言者提问质询。
质询者提问时间计入发言者时长,故针对PoI,发言者有权决定是否接受、何时接受、如何回答等事宜。
6、BP制区别于常见华语辩论赛制的最大特点在于“角色扮演”,如下表:正方上院第一位发言者首相(Prime Minister)正方一辩反方上院第一位发言者反对党领袖(Leader of the Opposition)反方一辩正方上院第二位发言者副首相(Deputy Prime Minister)正方二辩反对党副领袖(Deputy Leader of the反方上院第二位发言者反方二辩Opposition)正方下院第一位发言者政府阁员(Member of Government)正方三辩反方下院第一位发言者反对党阁员(Member of the Opposition)反方三辩正方下院第二位发言者政府党鞭(Government Whip)正方四辩反方下院第二位发言者反对党党鞭(Opposition Whip)反方四辩7、除一般的“立我方、批对方”的发言责任外,BP制中每个角色还有其独特的角色责任,对该责任的实现程度构成胜负评判的最大因素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例1 采用动量梯度下降算法训练BP 网络。
训练样本定义如下:输入矢量为p =[-1 -2 3 1-1 1 5 -3]目标矢量为t = [-1 -1 1 1]解:% P 为输入矢量P=[-1, -2, 3, 1; -1, 1, 5, -3];% T 为目标矢量T=[-1, -1, 1, 1];% 创建一个新的前向神经网络net=newff(minmax(P),[3,1],{'tansig','purelin'},'traingdm') % 当前输入层权值和阈值inputWeights=net.IW{1,1}inputbias=net.b{1}% 当前网络层权值和阈值layerWeights=net.LW{2,1}layerbias=net.b{2}% 设置训练参数net.trainParam.show = 50;net.trainParam.lr = 0.05;net.trainParam.mc = 0.9;net.trainParam.epochs = 1000;net.trainParam.goal = 1e-3;% 调用TRAINGDM 算法训练BP 网络[net,tr]=train(net,P,T);% 对BP 网络进行仿真A = sim(net,P)% 计算仿真误差E = T - AMSE=mse(E)例2 采用贝叶斯正则化算法提高BP 网络的推广能力。
在本例中,我们采用两种训练方法,即L-M 优化算法(trainlm)和贝叶斯正则化算法(trainbr),用以训练BP 网络,使其能够拟合某一附加有白噪声的正弦样本数据。
其中,样本数据可以采用如下MATLAB 语句生成:输入矢量:P = [-1:0.05:1];目标矢量:randn(’seed’,78341223);T = sin(2*pi*P)+0.1*randn(size(P));解:本例的MATLAB 程序如下:% P 为输入矢量P = [-1:0.05:1];% T 为目标矢量randn('seed',78341223); T = sin(2*pi*P)+0.1*randn(size(P));% 绘制样本数据点plot(P,T,'+');hold on;plot(P,sin(2*pi*P),':');% 绘制不含噪声的正弦曲线% 创建一个新的前向神经网络net=newff(minmax(P),[20,1],{'tansig','purelin'});disp('1. L-M 优化算法TRAINLM'); disp('2. 贝叶斯正则化算法TRAINBR');choice=input('请选择训练算法(1,2):');figure(gcf);if(choice==1)% 采用L-M 优化算法TRAINLMnet.trainFcn='trainlm';% 设置训练参数net.trainParam.epochs = 500;net.trainParam.goal = 1e-6;net=init(net);% 重新初始化elseif(choice==2)% 采用贝叶斯正则化算法TRAINBRnet.trainFcn='trainbr';% 设置训练参数net.trainParam.epochs = 500;randn('seed',192736547);net = init(net);% 重新初始化end% 调用相应算法训练BP 网络[net,tr]=train(net,P,T);% 对BP 网络进行仿真A = sim(net,P);% 计算仿真误差E = T - A;MSE=mse(E)% 绘制匹配结果曲线close all;plot(P,A,P,T,'+',P,sin(2*pi*P),':');echo off通过采用两种不同的训练算法,我们可以得到如图1和图2所示的两种拟合结果。
图中的实线表示拟合曲线,虚线代表不含白噪声的正弦曲线,“+”点为含有白噪声的正弦样本数据点。
显然,经trainlm 函数训练后的神经网络对样本数据点实现了“过度匹配”,而经trainbr 函数训练的神经网络对噪声不敏感,具有较好的推广能力。
值得指出的是,在利用trainbr 函数训练BP 网络时,若训练结果收敛,通常会给出提示信息“Maximum MU reached”。
此外,用户还可以根据SSE 和SSW 的大小变化情况来判断训练是否收敛:当SSE 和SSW 的值在经过若干步迭代后处于恒值时,则通常说明网络训练收敛,此时可以停止训练。
观察trainbr 函数训练BP 网络的误差变化曲线,可见,当训练迭代至320 步时,网络训练收敛,此时SSE 和SSW 均为恒值,当前有效网络的参数(有效权值和阈值)个数为11.7973。
例3 采用“提前停止”方法提高BP 网络的推广能力。
对于和例2相同的问题,在本例中我们将采用训练函数traingdx 和“提前停止”相结合的方法来训练BP 网络,以提高BP 网络的推广能力。
解:在利用“提前停止”方法时,首先应分别定义训练样本、验证样本或测试样本,其中,验证样本是必不可少的。
在本例中,我们只定义并使用验证样本,即有验证样本输入矢量:val.P = [-0.975:.05:0.975]验证样本目标矢量:val.T = sin(2*pi*val.P)+0.1*randn(size(val.P))值得注意的是,尽管“提前停止”方法可以和任何一种BP 网络训练函数一起使用,但是不适合同训练速度过快的算法联合使用,比如trainlm 函数,所以本例中我们采用训练速度相对较慢的变学习速率算法traingdx 函数作为训练函数。
本例的MATLAB 程序如下:close allclearecho onclc% NEWFF——生成一个新的前向神经网络% TRAIN——对BP 神经网络进行训练% SIM——对BP 神经网络进行仿真pause% 敲任意键开始clc% 定义训练样本矢量% P 为输入矢量P = [-1:0.05:1];% T 为目标矢量randn('seed',78341223);T = sin(2*pi*P)+0.1*randn(size(P));% 绘制训练样本数据点plot(P,T,'+');echo offhold on;plot(P,sin(2*pi*P),':'); % 绘制不含噪声的正弦曲线echo onclcpauseclc% 定义验证样本val.P = [-0.975:0.05:0.975]; % 验证样本的输入矢量val.T = sin(2*pi*val.P)+0.1*randn(size(val.P)); % 验证样本的目标矢量pauseclc% 创建一个新的前向神经网络net=newff(minmax(P),[5,1],{'tansig','purelin'},'traingdx');pauseclc% 设置训练参数net.trainParam.epochs = 500;net = init(net);pauseclc% 训练BP 网络[net,tr]=train(net,P,T,[],[],val);pauseclc% 对BP 网络进行仿真A = sim(net,P);% 计算仿真误差E = T - A;MSE=mse(E)pauseclc% 绘制仿真拟合结果曲线close all;plot(P,A,P,T,'+',P,sin(2*pi*P),':');pause;clcecho off下面给出了网络的某次训练结果,可见,当训练至第136 步时,训练提前停止,此时的网络误差为0.0102565。
给出了训练后的仿真数据拟合曲线,效果是相当满意的。
[net,tr]=train(net,P,T,[],[],val);TRAINGDX, Epoch 0/500, MSE 0.504647/0, Gradient 2.1201/1e-006TRAINGDX, Epoch 25/500, MSE 0.163593/0, Gradient 0.384793/1e-006TRAINGDX, Epoch 50/500, MSE 0.130259/0, Gradient 0.158209/1e-006TRAINGDX, Epoch 75/500, MSE 0.086869/0, Gradient 0.0883479/1e-006TRAINGDX, Epoch 100/500, MSE 0.0492511/0, Gradient 0.0387894/1e-006TRAINGDX, Epoch 125/500, MSE 0.0110016/0, Gradient 0.017242/1e-006TRAINGDX, Epoch 136/500, MSE 0.0102565/0, Gradient 0.01203/1e-006TRAINGDX, Validation stop.例3 用BP网络估计胆固醇含量这是一个将神经网络用于医疗应用的例子。
我们设计一个器械,用于从血样的光谱组成的测量中得到血清的胆固醇含量级别,我们有261个病人的血样值,包括21种波长的谱线的数据,对于这些病人,我们得到了基于光谱分类的胆固醇含量级别hdl,ldl,vldl。
(1) 样本数据的定义与预处理。
choles_all.mat 文件中存储了网络训练所需要的全部样本数据。
利用load 函数可以在工作空间中自动载入网络训练所需的输入数据p 和目标数据t,即load choles_allsizeofp = size (p)sizeofp = 21 264sizeoft = size (t)sizeoft = 3 264可见,样本集的大小为264。
为了提高神经网络的训练效率,通常要对样本数据作适当的预处理。
首先,利用prestd 函数对样本数据作归一化处理,使得归一化后的输入和目标数据均服从正态分布,即[pn,meanp,stdp,tn,meant,stdt] = prestd(p,t);然后,利用prepca 函数对归一化后的样本数据进行主元分析,从而消除样本数据中的冗余成份,起到数据降维的目的。
[ptrans,transMat] = prepca(pn,0.001);[R,Q] = size(ptrans)R = 4 Q = 264可见,主元分析之后的样本数据维数被大大降低,输入数据的维数由21 变为4。